A Spatio-temporal Graph Network Allowing Incomplete Trajectory Input for Pedestrian Trajectory Prediction
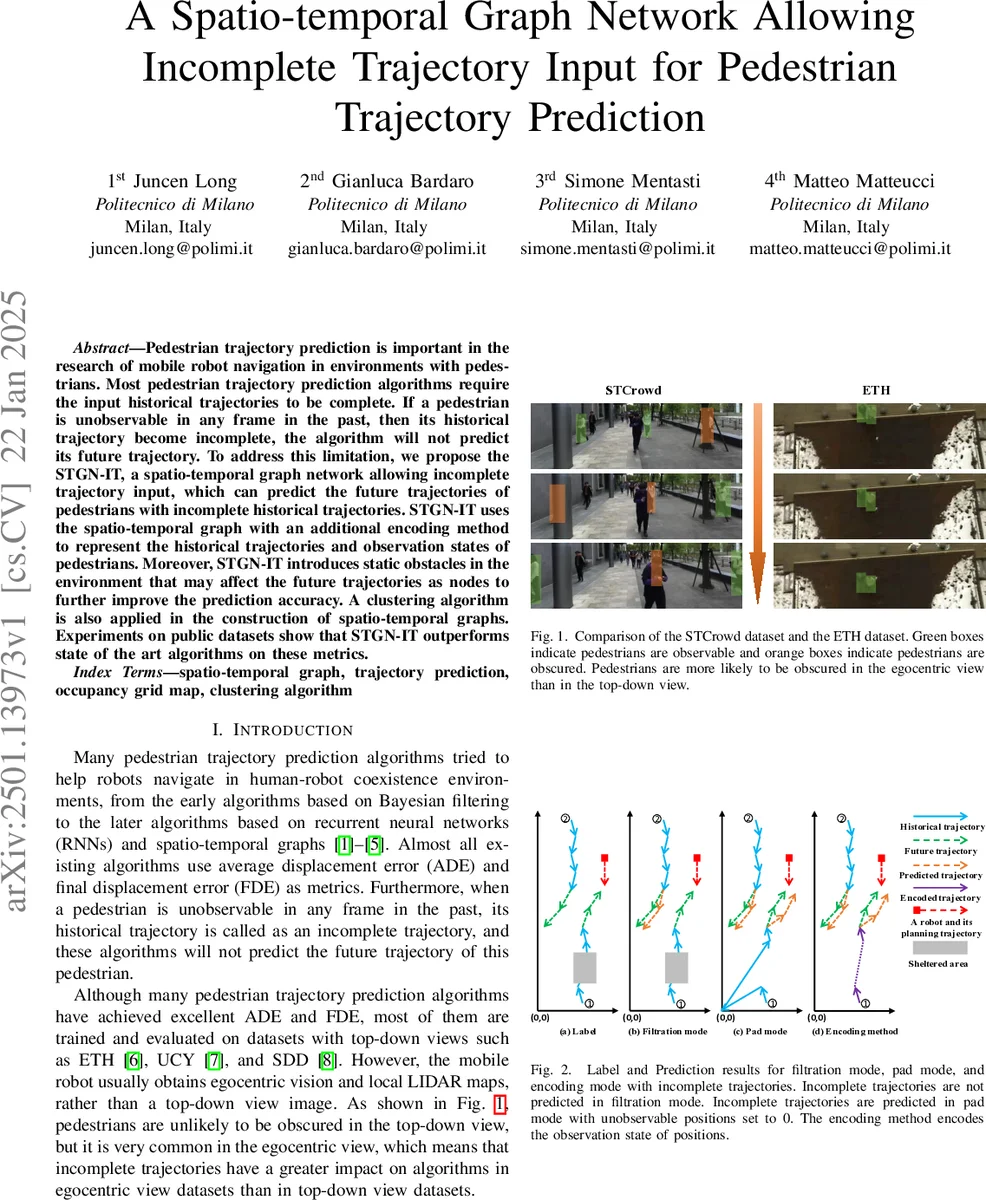
Pedestrian trajectory prediction is important in the research of mobile robot navigation in environments with pedestrians. Most pedestrian trajectory prediction algorithms require the input historical trajectories to be complete. If a pedestrian is unobservable in any frame in the past, then its historical trajectory become incomplete, the algorithm will not predict its future trajectory. To address this limitation, we propose the STGN-IT, a spatio-temporal graph network allowing incomplete trajectory input, which can predict the future trajectories of pedestrians with incomplete historical trajectories. STGN-IT uses the spatio-temporal graph with an additional encoding method to represent the historical trajectories and observation states of pedestrians. Moreover, STGN-IT introduces static obstacles in the environment that may affect the future trajectories as nodes to further improve the prediction accuracy. A clustering algorithm is also applied in the construction of spatio-temporal graphs. Experiments on public datasets show that STGN-IT outperforms state of the art algorithms on these metrics.
💡 Research Summary
The paper tackles the problem of pedestrian trajectory prediction for mobile robots operating in human‑populated environments, with a particular focus on the challenges posed by incomplete historical observations that are common in egocentric viewpoints. Existing methods, such as Social‑LSTM, Social‑STGCNN, and other graph‑based approaches, assume that the past trajectory of each pedestrian is fully observable; when a pedestrian is occluded, these methods either discard the target or treat the missing data as zeros, leading to severe performance degradation, especially in the “pad mode” where zeros are used to fill missing positions.
To overcome these limitations, the authors propose STGN‑IT (Spatio‑Temporal Graph Network allowing Incomplete Trajectory input). The core idea is to augment the conventional spatio‑temporal graph representation with explicit observation‑state encoding and to incorporate static obstacles derived from occupancy‑grid maps as additional graph nodes. The system consists of four main modules:
- Spatio‑Temporal Graph Construction – Each node represents a pedestrian or an obstacle at a given time step and contains both position and velocity (
Comments & Academic Discussion
Loading comments...
Leave a Comment