Multiclass Information Flow Propagation Control under Vehicle-to-Vehicle Communication Environments
Most existing models for information flow propagation in a vehicle-to-vehicle (V2V) communications environment are descriptive. They lack capabilities to control information flow, which may preclude their ability to meet application needs, including …
Authors: Jian Wang, Srinivas Peeta, Lili Lu
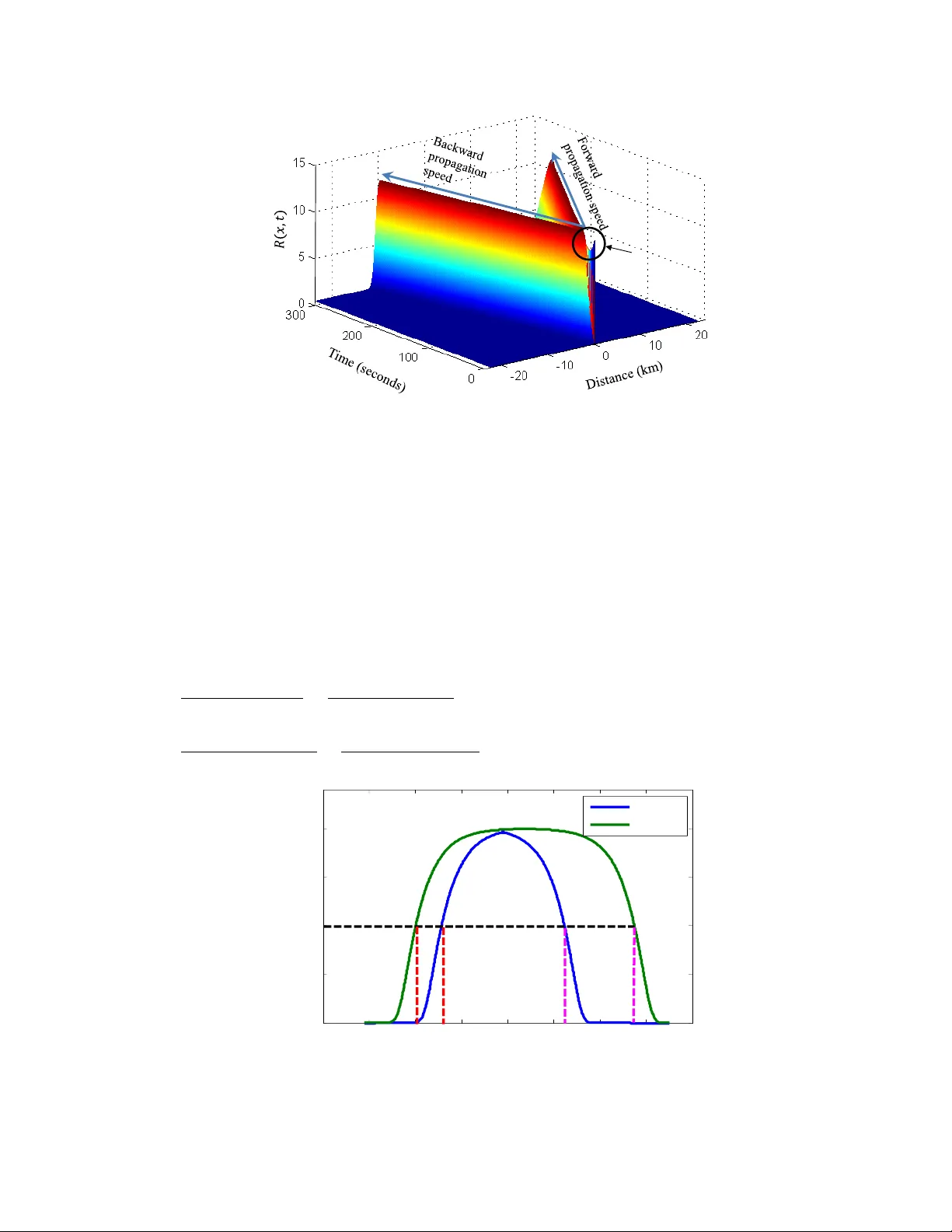
1 Multiclass information flow propagation control under vehicle-to-vehicle comm unication environments Jian Wang a,b , Srinivas Peeta c,1 , Lili Lu d , Tao Li e a School of Civil En gineering, Purdue University, West Lafa yette, IN 47907, United States b NEXTRANS Cente r, Purdue University, West Lafayette, IN 47906, Un ited States c School of Civil an d Environmental E ngineering, and H. Milto n Stewart Sch ool of Industrial and Systems Engineering, Georgia Institute of Technology, Atlanta , GA 30332, United States d Faculty o f Maritime and Transportatio n, Ningbo University, Chin a e Department o f Computer Scien ce, Purd ue University, West Lafayette, IN 479 07, United States Abstract: Most existing models for information flow propagation in a vehicle-to-vehicle (V2V) communications environment are descriptive. They la ck capabilities to control information flow, which may preclude their ability to meet application needs, including the need to propagate different information t ypes simultaneously to different target locations within corresponding time delay bounds. This study proposes a queuing-based modeling ap proach to control the propagation of information flow of multiple classes. Two control parameters associated with a vehicle, th e number of communication servers and the mean communication service rate, are levera ged to control the propagation performance of different infor mation classes. A two-layer mo del is developed to characterize the information flow propagation wave ( IFPW) under the designed queuing strategy. The upper l ayer is for mulated as integro- differential equations to characterize the spatiotemporal information dissemination due to V2V communication. The lower la yer characterizes the traffic flow d ynamics using the Lighthill-Whitham- Richards model. The analytical solution of the asymptotic density of inform ed vehicles and the necessary condition for existence of the IFPW are derived for homogeneous t raffic conditions. Numerical experiments provide insights on the im pact of the mean communication service rate on information spread a nd its spatial coverage. Further, a numer ical solution method is de veloped to solve the two-lay er model, which aids in estimating the impacts of the control parameters in the queuing strategy on the IFPW speed under homog enous and heterogeneous conditions. The proposed modeling approach enables controlling the propagation of information of different information classes to meet application needs, which can assist traffic managers to desi gn effective and efficient traffi c management and cont rol strategies under V2V communications. Keywords: Vehicle-to-vehicle communications, multiclass information flow propagation, queuing system, density of informed vehicles, information flow propagation speed. 1. Introduction The rapid development of vehicle-to-vehicle (V2V) communication technologies has motivated their use for a wide spectrum of innovative solutions to enhance transporta tion safety, efficienc y, and sustainability. A V2V communications-based traffic system can potentiall y be leveraged to enhance traffic safet y b y more effectively detecting emerging conflict sit uations, improve traffic efficienc y through info rmation-based and other control strategies, and reduce ener gy consumption and emissi ons. For example, t his entails the communication of a vehicle’s status to other vehicles and/or the surrounding infrastructure, and thereby the exchange of info rmation on travel/traffic conditions. Hence, vehicles equipped with such a capability for two-wa y communications can potentially gain spatio-temporal knowledge on travel-related conditions, which can be used to develop vehicle-level travel strat egies 1 Corresponding author . Te l.: +1 404-894-2243. Email address : pee ta@gatech.e du (S. Pe eta) 2 and/or network-level traffic management str ategies. Fu rther, V2V-based traffic s ystems enable decentralized information generation and dissemination. Ve hicles in a V2V-based s ystem can generate information and re lay it to other vehicles through multi -hop proc esses. Unlike centra lized informati on systems, a V2V -based traffic system can potentiall y p rovide ti mely information in emergency/disaster situations by avoiding delays associated with data collection and communication with control center. Understanding the characteristics of spatiotempo ral information flow pro pagation in a V2V- based traffic system is important as most application s require timely and reliable information deliver y. However, modeling info rmation flow propag ation in space and time is c hallenging. Factors from both traffic flow domain and communications domain significantly affect the reliability of V2V communication and information propagation . The traffic flow d ynamics affect occurrence of V2V communications. Communication constraints, such as communication f requency, ch annel capacity, and communication power, significantly affect the reliability of V2V communications. In the literature, various models have been proposed to characterize information flow propag ation in different traffic flow and communica tion environments. These models can be classified into microscopic and macroscopic. Microscopic models address information flow propagation b y considering the spatial distribution of traffic flow. They factor the ef fects of the random position s of equipped vehicles in the traffic stre am on informati on flow propagation. Simulation and anal ytica l models have been developed to analyze V2V propagation performa nce in terms of the expected information propagation dist ance (Wang, 2007; Wang e t al., 2010; Wang et al., 2011; Wang et al., 2012; Yin et al., 2013; Wang et al., 2015; Du a nd Dao, 2015; Du et al., 2016), under different traffic flow scenarios. However, these models oversimplify the effects o f communication constraints by assuming that information c an be retransmitted instantaneously. This assumption neglects the time latency of information flow propagation. Thereby, these models onl y characterize information dissemination in the space domain, but not in the time domain. To address the aforemen tioned gaps, some recent studies have sought to characterize information flow propagation at a macroscopic level (K im et al. 2017; Wang et al. 2018; Kim e t al., 2018) b y introducing the c oncept of information flow propagation wave (IFPW). They use the notion that w hen information spreads through mult i-hop broadcasting communic ations, from a macroscopic perspective, there is a moving boundary that separates traffic flow into informed and uni nformed regions, and mo ves towards the uninformed region like a wav e. By leveraging the analogy of the IFPW with disease spread in epidemiology, anal ytical models are developed to characterize the IFPW. These macroscopic models relax the assumption of instantaneous information propagation and can de scribe the spatiotemporal spread of information i n the traffic flow. In addition, these models capture the effects of V2V communication constrai nts realistically using a communication kernel. Further, interactions bet ween V2V communications and traffic flow d ynamic s are captured b y incorporating the effects of congested traffic, such as the backward propagating traffic wave, on information flow propagation. The models discussed her etofore are descriptive, and seek to describe the spatiotemporal propagation of information to address effects of traffic flow dynamics and/or communication constraints . However, they l ack a c apability to control the propagation of information flow, which is necessar y for traffic management applications in a V2V -based traffic sy stem. For example, real-time traffic/routing information can h elp tra velers choose be tter routes to reduce travel time. However, congestion can worsen if all travelers receive the same inform ation and choose the same (or similar) routes in an uncoordinated V2V-based system or receive and choose the same routing suggestions. Hen ce, the propagation of informati on flow needs to b e contr olled so that the spatiotemporal access to informati on varies across vehicles in such a way as to improve system performance. S imilarly, under emergency evacuation, the propagation speed of evacuation i nformation needs to b e controlled so that it can reach different areas in the affected region with different impact levels at the desired times to reduce the severe 3 traffic congestion or gridlock that would otherwise occur due to the simult aneous evacuation of all evacuees. Another common c haracteristic of previous studies is that the y onl y consider the propaga tion of a specific information pa cket of interest or one t ype of info rmation. In practical applications, informa tion can belong to different classes (e.g., safe ty information, routing information, work zone informati on). Hence, a V2 V-based system ma y need to propagate information from different information classes simultaneously. However, the application needs of information from different infor mation classes can be different, in ter ms of three performance mea sures: (i) information spread, defined here as the proportion of vehicles informed with a specific information packet, (ii) bounds on ti me delays for thi s inform ation to re ach spe cific locations, and (iii) spatial coverag e, defined here as the distance this information can be propagated from its point of origin. For example, urgent traffic a ccident information (e.g ., road is b locked by an accident) needs to be delivered to all vehicles in the im pacted area with low latency. By comparison, routing information needs to reach only a certain proportion of v ehicles to avoid possi ble congestion arising from the provision of information on the suggested route . Work zone information or sudden ha rd brake information may need to be propagated in a small area in the vicinity of where they a re generated. This stud y designs a queuing-based modeling approach to control the propagation of information of different info rmation c lasses to meet application needs related to infor mation spre ad, time delay bounds, and spatial coverage. An information class is d efined as a t ype of information which has sim ilar application needs in terms of the three propagation performance measures. To enable c ontrol for multiclass information flow propagation, this study assumes that the siz e of each information packet is the sa me a nd the channel capac ity is shared equa lly with all equipped vehicles within communicat ion range of that vehicle (Wang et al., 2018). Under this assumption, an equipped vehicle can send data containing multiple information packets during o ne tra nsmission, whose number is determined by the size of one information packet, channel c apacity, communication frequency, and the number of e quipped vehicles within commun ication range of that vehicle. This impl ies that an equipped vehicle ca n serve (send) multiple information packets simultaneously . To better characterize the informat ion service (sending) process in our queuing-based approach, we denote a “virtual communication server” (hereafter, refer red to as “ communication server”) as the sto rage amount in the tra nsmitted data that is equal to the size of an information packet. A communication se rver can serve at most one information packet at a time. The total number o f communication servers is equal to the max imum number of information packets th at an equipped vehicle c an send sim ultaneously during one transmission, which is labeled the tra nsmission capacity. We denote communica tion service time a s the time duration an information packet is in the communication server. During the communication service time, the information packet will be repetitively sent b y the equipped vehicle whe re the number of tra nsmissions depends on the communication f requency which is the number of data transmissions per unit time enabled b y the V2V device characteristics in the veh icle. We denote the mean communication service rate for a server as the inverse of the mean communication se rvice time of all information packets served by that server. To enable control for mul ticlass information flow propagation, for the first time in the literature, a queuing strateg y is developed for each V2V-equipped ve hicle to propagate the information packets of different information classes that it receives or genera tes. We assume information packets in different information classes will form different queues. T hereby, when an informati on packet is received by a n equipped vehicle , it will be for warded to the queu e for the information c lass it belong s to. Af ter being in the queue, the information packet will enter a communication server for this information class t o be disseminated. It will be deleted f rom the server after its assigned communic ation service time is reached. Based on this conceptual queuing strategy, information propagation control is enabled by assigning 4 different numbe r of communication servers and mean communication service rate s to different information classes to send the information. I t sho uld be noted that the mean communication service rate for an inform ation class determines the mean communication service time of each information pa cket in the information class, which impacts the number o f transmissi ons of each information packet in thi s cl ass. Due to existence of com munication failure, an information packet cannot be guaranteed to be received by other vehicles if it is just sent once by an e quipped vehicle. The queuin g strategy allows an equipped vehicle to c ontrol the number of transmissions of an information packet by leveraging the mea n communication service rate so as to control the number of vehicles within communication r ange of this vehicle that can r eceive the information pa cket. Thereb y, while the mean communication service rate does not impact the success rate of one V2V communication, it significa ntly impact s the tot al success rate of V2V communication s by allowin g an equipped vehicle to transmit information multiple times. Also, the number of com munication servers assigned to an information class significantly imp acts the mean waiting time in the queue for info rmation pa ckets in that class, which impacts the information flow propagation speed. Thereby, two control parameters, the number of assigned communication servers and mean communication service rate, can be determined for each information class to achieve the desi red propagation performance related to information spread, time delay bounds, and spatial coverage. This stud y conceptually extends the macroscopic models developed b y Kim et al. (2017) and Wang et al. (2018), and proposes a new two-layer anal ytical modeling approach to characterize the IFPW under the proposed queuing strateg y. An integro-differential equation (IDE) model is derive d to characterize the spatiotemporal information propa gation flow under the desig ned queuing strategy in the uppe r lay er. The lower layer a dopts the Lighthill-Whitham-Richards (L WR) model ( Lighthill and Whitham, 19 55; Richards, 1956) to characterize the traffic flow d ynamics. The two-la yer model enables investigation of the following three questions. First, what is the de nsity o f equipped vehicles that can receive a speci fic information packet under given values of the two control parameters? This question seeks to provide insights on controlling in formation spread . Second, how do the two control pa rameters in the queuing system im pact the p ropagation speeds of spe cific information pa ckets o f interest belonging to different information classes? Addressing this question is useful for controlling the time delay of information packets of differe nt information classes in reaching desired locations. Third, what a re the conditions that can e nsure the specific information packet can form a wa ve to be propag ated over the traffic stream, and how the two control parameters impact the p ropagation dist ance of an information packe t? This ques tion addresses the necessary conditions for the for mation of an IFPW which is related to the spa tial coverage of information. The contributions of this study are fivefold. First, unlike previous studies that describe how information propagates in space and time, this study newl y p roposes to control the spatiotemporal propagation of information to generate prescriptive solutions that can be leveraged for performance enhancement and management of V2V -based tr affic systems. Second, the stud y addresses, for the first time, the more g eneral case of multiple information classes that are inher ent to traff ic sy stems. To do so, it develops a queuin g-based modeling approach f or an equipped vehicle to propagate different t ypes of information simultaneously. Thereb y, it enables effective and efficient contr ol for multiclass information flow propagation under d ifferent traffic and comm unication environments by determining the values of the two control parameters in the queuing strateg y. Third, the study develops a new nonlinear IDE s ystem to characterize the information disse mination wave. The nece ssary conditions for the existence of IF PW and the a nalytical solution for the asymptotic densit y of informed vehicle are derived under homo genous conditions. To the best of our knowledge, the solution of the IDE s ystem analogy to the p roposed IDE system has not been stu died before, even in the epidemiolog y literature. These anal ytica l expositions quantify the impacts of t he two control parameters on the density of informed vehicles and the spa tial 5 coverage. Fourth, the study desi gns numerical solutions to solve the two-layer model under homo geneous as well as heterogeneous conditions while considering multiple performance measures. They provide valuable insights for controlling mul ticlass information flow prop agation to achieve the desired performance in terms of information spread, the time delay to reach the target locations, and sp atial coverage under heterogeneous conditions. Fifth, the stud y calibrates the parameters in the proposed model using NS -3 simulations, which enhances its applicability by enabling capturing the effects of communication constraints on information flow propagation more realistically. The re mainder of the paper is org anized as follows. The ne xt section discusses the designed queuing strategy and the framew ork of the proposed model to characterize the I FPW . Se ction 3 formulates a two- layer model to characterize the I FPW in space and time under the proposed que uing strategy. In Section 4, the analytically solutio n for the asymptotic densi ty of informed vehicles and the condition for ex istence of IFPW under homo geneous traffic conditions are discussed. In addition, the numerical solution method is presented to solve the proposed two-layer model for heterogeneous condition s. Results from numerical experiments are discussed in Section 5, to demonstrate the effectiveness of the proposed model to control the propagation performance of different information classes. Section 6 provides some concluding comments. 2. Preliminaries Consider a hig hwa y with a traffic flow stream c onsisting of V2V-equipped and V2V-unequipped vehicles. Information is generated and broadcasted to other equipped vehicles through multi -hop V2V communications. Each equipped vehicle receives information from other equipped vehicles and broadcasts such inform ation and the information it generates to all other equipped vehicles within communication range. Let information packets relay ed in the traffic flow be divided into classes, each of which has di fferent requirements in t erms of information spread, time delay bounds and spatial coverage. Let = { 1,2, } denotes the set of information classes. When an equipped vehicle receives multiple pac kets, it filters the information pa ckets to identify those that have not been received before. I t then moves such unduplicated information packets (labeled effective in formation packets) into the queues fo r the corresponding information classes to wait to be propagated according to the information class they belong to. The effective informati on arrival rate is affected b y unsuccessful V2V communication and removal of duplicated information packets. Because such events are random and independent, following Wang et al. (2018) and Zha ng et al. (2016), this study a ssumes that the arrival of effective information packets to different information classes follows a Poiss on proc ess. Let , , be the arrival rate of information packets for information classes 1,2 , , respectively. Suppose that the size of all information packets disseminated over the traffic flow is identical, and the channel capac it y is s hared equally with all e quipped vehicles within communication range . Let denote the transmission capacity, which describes the number of information packets that c an be delivered by an equipped vehicle through one V2V communication. In this study, we assume the transmission c apacity for all equipped vehicles to be the same. It should b e noted that has an uppe r bound determined by the size of an information packet, the densit y of the traffic flow, the communication frequency and the channel capacity (Wang et al., 2018). To control propagation performance for each information class, a queuing strate gy for relaying information of different infor mation classes is designed in this study , as shown in Figure 1. Note that an equipped vehicle ca n transmit information packets during one c ommunication. To better illustrate th e queuing str ategy, we assume an equipped vehicle h as communication servers each of which can se rve one information packet. A communication server represents the stora ge amount in the transmitted data that is equal to the size of one information pa cket (see Figure 1). The number of th e communication 6 servers assi gned to a particular information class determines the maximum number of information packets in this information class that can be transmitted simultaneously by an equipped vehicle. Let be the number of comm unication servers assigned to information c lass , . To control multi class information flow propagation, information packe ts in diffe rent classes will form different queues (see Figure 1). If on e communication server for in forma tion class is empty, the first information pa cket in the queue for information class will enter into the server to be sent out. Let be the mean communication servic e rate (pa ckets/second) for information packe ts in infor mation class . The inverse of (i.e., 1 ) is the mean c ommunication se rvice time (i.e., transmission duration) for an information packet in information class . The information packet in the communication server will be transmitted repetitively until the communi cation service time is reached. Thereb y, the communication service ti me significantly impact the number of vehicles that can receive the specifi c information of interest of information class . Figure 1. Queuing strategy for relay ing information of different classes To facilitate modeling, we a ssume the communication servic e time of each information packet in an arbitrary class , follows an exponential distribution with mean 1 . The communication service time can be generated randoml y in advance according to the exponential distribution with mean 1 . An information packet wil l be removed from the sy stem if it s assigned co mmunication service time is reached. Note that for an arbitrary information class , the arrival of inf ormation packets follows a Poisson process with parameter and the corresponding communica tion service time follows an exponential distribution with mean 1 . Thereby, propagation of information packets in i nformation class follows a / / queuing process. Note that the mean communication service r ate f or information packets in an arbitrary information class (i.e., ) impacts the number of vehicles that can receive information packets from this information class. Further, according to the queueing theory, the mean communication service rate ( ) and the number of assigned communication server s (i.e., ) for information c lass determine the mean waiting ti me of a n information packet in the queue. Thereby, the propagation performance of an information packet of information class in terms of information spread, time dela y bounds, and spatial coverage can be controlled by assigning various values to and . It should be noted that the propagation pe rformance of information of diff erent info rmation classes is constrained b y the tot al number of communication servers in an equipped vehicle. Vehicle 1 Vehicle 2 Vehicle 3 Enter service Enter service Queue of class 1 Queue of class s Data to be transmitted 1 1 servers, ea ch with mean service time 1 Arrival rate Arrival rate servers, ea ch with mean service time 1 Information relaying Single unit of information packet Information arrival 7 Under the desi gned queuing strategy, equipped v ehicles are divided int o four ve hicle classes, the susceptible vehicles (labeled ), the information-h olding vehicles (labeled ), the information-rela y vehicles (labeled ) and the information -excluded vehicles (label ed ). Susceptible vehicles are equipped vehicles that have not received the specific information packet of interest. The y become information-holding v ehicles if they receive that i nformation packet and are holding it in the qu eue for transmittal. The information-holding vehicles bec ome information-relaying vehicles if that information packet e nters a c ommunication server to be disseminated to the other vehicles. Once the communica tion service time is reac hed fo r that inform ation packet, it will be removed from the vehicle. The information- relying vehicle then becomes an information-excluded vehicle. I t is wort h noting that the susceptible vehicles can become information-relaying vehicles directly if the specific information packet of interest enters into a c ommunication server without waiting in a queue; that is, whe n this information packet is received/generated, there is no queue for the corresponding information class. Similar to Kim et al. (2017) and Wang et al. (2018), t he IFPW consists of two waves: the information dissemination wave in the information flow domain and the traffic flow propagation wave in the traffic flow domain. A two-layer model is developed in this study to model the I FP W. The modeling framework is shown in Figure 2. In the upper-laye r, integro-differential equations (IDEs) will be derived to characterize the information dissemination wave s. This layer describes how vehicle de nsities by vehicle class will cha nge instantaneously through V2V c ommunication s under the designed queuing strategy. The lower la yer describ es the traffic flow d ynamics. In this stud y, the LWR model will be us ed to characterize traffic flow dynamics. Based on th e two-la yer model, the asymptotic IFPW speed, the asymptotic densit y o f informed vehicles and the conditions for existence of IF PW will be investigated in this study. Figure 2. IFPW modeling framework under the designed queuing strategy It should be noted that while the starting point for the modeling framework in this study is similar to those of Kim et al. (2017) and Wang et al. (2 018), it differs from them fundamentally in four key aspects. First, while Kim et al. (2017) and Wang et al. (2018) onl y de scriptively quantify the impacts of traffic flow and communication constraints on information flow propagation, this study seeks to control information flow propagation to ensure that performance in terms of information spread, time dela y bounds and spatial converge can meet the application needs of information under different traffic fl ow and communication environments. Second, this stud y proposes a queuing strate g y for multiclass • Asymptotic IFPW speed • Asymptotic IFPW d ensity of informed vehicles • Necessary conditions f or information propagation Traffic flo w dynamics LWR model (PDEs) Susceptible ( S ) Relaying ( R ) Excluded ( E ) Upper layer: information dissemination Lower layer: dynamics of traffic flow SHRE model (IDEs) Holding ( H ) Queuing strategy Density of unequ ipped vehicles ( U ) Density of V2V- equipped vehicles ( V ) 8 information flow propagation that enables dist ribution of limited communication resources in an equipped vehicle (i.e., number of communication servers, and mean c ommunication service time) for sending information of different cl asses. This improves information propaga tion efficiency b y coordinating the comm unication resources wit h dynamic information arrival rates. However, the communication service ti me, which is critica l for V2V communication r eliability, is not controlled in Kim et al. (2017 ) and Wang et a l. (2018). For e xample, the communication service time may be too short when information a rrival rate is high, precluding reliable propagation of that information. Third, this study develops a new nonlinear IDE system to characterize th e information flow dissemination wave in the upper la yer, and an alytically derives its solution. This IDE s ystem has not been studied before even in epidemiology, unlike t he IDE s ystems develope d in Kim et al. (2017) and Wang et al. (2018) whi ch have been ex tensively studied in epidemiology. Fourth, unlike those studies, this stud y verifies the success r ate of V2V communication s and c alibrates parameters usin g NS -3 simulation s. This enhances the applicabilit y of the pr oposed model b y better capturing the impacts of traffic flow and communication constraints on V2V communications. 3. Modeling the multiclass information flow propagation wave 3.1 Modeling the information flow dissemination wave in the upper layer Assume the specific information packet of int erest belongs to an arbitrary in formation class , . This section seeks to mo del the information diss emination wave in the upper la yer under the designed queuing str ategy. I t describes the instantaneous change in the density o f equipped vehicles by v ehicle class (i.e., , , , for information packets in class ) due to V2V communications. The impacts of communication constraints (communication power, communication frequency, signal interference, etc.) on the success of V2V communications is explicitly factored in this model . Let be the current time. Divide the time horizon of interest uniforml y int o consecutive tim e windows of length each. Denote ( , ) and ( , ) as the densities of the susce ptible vehicles and the vehicles informed with the specific info rmation packet of inte rest in infor mation class , respectively, at time and location . Note that the informed vehicles consist of vehicles from classes , and which have received this information packet. Let ( , ) = ( , ) ( , ) be the densit y of vehicles informed with the specific information packet of interest duri ng time [ , ] . Denote ( , ) = ( , ) ( , ) as the densit y change of informed vehicles at location during time interval [ , ] . Note ( , ) = ( , ) as an equipped vehicle is either susceptible or informed. L et the c urrent time be = ; is a positive intege r. Conceptually adapting from epidemiology and modifying, ( , ) is formulated as: ( , ) = ( , ) ( , ) ( , ) Ω (1) where Ω denotes the domain of space, is communication frequency, and denotes the expected number of transmissions occurring in time len gth . Also, ( , ) is the densit y of vehicles relaying the specific information packet of interest in in formation class at time and location . Fun ction ( , ) is a communication kernel which re presents the probabilit y that a susceptible vehicle at loc ation can successfully receive the specific information pac ket sent from a vehicle at location under a given communication environment (communication frequency, channel capacit y, communication power, etc.) and traffic flow environment (traffic density, e tc.). I t characterizes the reliab ility of V2V communication realistically b y capturing the impact of factors in both the communication and traffic flow domains . In 9 the study ex periments in Section 5, function ( , ) is calibrated usin g NS-3 simulation. ( , ) ( , ) Ω denotes the probabilit y that a susceptible vehicle at location receives the specific infor mation packet of infor mation class sent by an informed vehicle over the space domain Ω . Suppose the mean arrival ra te of information packets in information class , is packets/second. Let and be the number of communication servers and the mean communication service rate (packets/second) assigned to information class , respectivel y. and are controllable parameters which will b e leve raged to control t he propagation of th e sp ecific information pa cket of interest of information class . To ensure the information packets in information class can be propagated by an equipped vehicle, and are selected such that < , . As discussed earlier, under the designed queuing strategy, the arrival and service process of information packets in information class follow / / queue process. Thereby, at current time , the vehicles that are relaying the specific information packet of interest of information class consist of two groups: (1) the vehicles relaying the specific information packet without the information-holding process (i.e., queuing process). This implies when these vehicles receive the specific information packet, there is no queue for information c lass in these vehicle s. Thereb y, the sp ecific information pa cket of interest can enter into the communication server to be disseminated out directly; and (2) the vehi cles relaying the sp ecific information packet with a n i nformation-holding process (queue process), i.e., the specific information pa cket of intere st experiences a queuin g process before entering into the communication server. Let be the waiting time for the specific infor mation packet of interest of information class , and = Pr be the probabilit y that the waiting time of this information packet in the queue is less than . According to Gross et al. (2008, page 71), we have ( ) = Pr = 1 0 ! ( 1 ) ( ) (2) where = ; = ; and 0 is the probabilit y that there is no information packet of information class in the system, formulated as 0 = ! ( 1 ) + ! 0 (3) According to Eq. (2), ( ) = Pr = Pr = = 1 0 ! ( 1 ) (4) where 0 is the probability that the specific info rmation packet is received by a vehicle at a time instant when there is no queue for information class . Let = 0 ! (1 ) (5) Then ( ) = 1 (6) From Eq. (2), we have Pr > = 1 ( ) = 0 ! ( 1 ) ( ) (7) 10 Let be the service time of the specific information packet of interest in the communication server, and Pr be the probabilit y th at the communication service time is less than . Recall the communication service time follows exponential distribution with mean 1 , then Pr = 1 (8) This implies Pr > = (9) ( , ) can then be formulated as ( , ) = ( , ) + ( , ) (10) where ( , ) = ( ) ( , ) Pr > / = (1 ) ( , ) / ( , ) = ( , ) Pr > Pr > 0 / = ( , ) ( ) ( ) ( ) 0 / where ( , ) is the accumulated density of ve hicles relay i ng the sp ecific information packe t of inte rest of information class without queuing process at location and current time . ( , ) Pr > is the density of vehicles informed at time and rela ying the specific inf ormation packet at location and current ti me . ( , ) is the accumulated densit y of vehicles rel a y in g the specific information packet after queuing pro cess at location and current time . The term ( , ) Pr > 0 denotes the density of v ehicles at location that become in formed time units ago and are propagating the specific informati on at current time after experiencing the queuing process. To derive the continuous model, let ; dividing both sides of Eq. (1) b y , we have lim 0 ( , ) = ( , ) = lim 0 ( , ) ( , ) ( ( , ) + ( , ) ) Ω (11) Note ( , ) = ( , ( 1) ) ( , ) ( , ) . (12) Then lim 0 ( , ) ( , ) ( , ) Ω = lim 0 (1 ) ( , ) ( , ) ( , ) . / (13a) 11 and lim 0 ( , ) ( , ) ( , ) Ω = lim 0 ( , ) ( , ) ( , ) Ω (13b) where ( , ) = ( , ) ( ) ( ) ( ) 0 / (13c) Note the terms ( , ) ( , ) and ( , ) ( ) ( ) 0 ( ) are continuous and bounded in the time domain. Both of them are Rie mann integrable. Thereby, Eq. (13a) and Eq. (13b) can be written, respective l y, a s: lim 0 1 ( , ) ( , ) ( , ) / = 1 ( , ) ( , ) ( , ) 0 (14a) lim 0 ( , ) ( , ) ( , ) Ω = ( , ) ( , ) 0 0 ( , ) ( ) ( ) ( ) Ω (14b) Note ( , ) = ( , ) ; substituting Eq. (14) into Eq. (11), we have ( , ) = 1 ( , ) ( , ) ( , ) 0 + ( , ) ( , ) 0 0 ( , ) ( ) ( ) ( ) Ω (15) According to Eq. (10) and Eq. (12), in continuous space, th e density of information-relaying vehicles can be written as ( , ) = 1 ( , ) 0 ( , ) 0 ( ) ( ) ( ) 0 (16) The terms 1 ( , ) 0 and ( , ) 0 ( ) ( ) 0 ( ) denote the densit y of information -relaying vehicles without queuing process and with queuing process, respectively. Let = , then ( , ) = , ( , ) + , ( , ) (17a) where , ( , ) = 1 ( , ) ( ) 0 (17b) 12 , ( , ) = ( , ) 0 ( ) ( ) ( ) 0 (17c) The derivative of ( , ) with respect to is ( , ) = , ( , ) + , ( , ) (18a) where , ( , ) = 1 ( , ) + 1 ( , ) ( ) 0 = 1 ( , ) , ( , ) ( , ) (18b) , ( , ) = ( , ) ( ) 0 + , ( , ) (18c) Thereby, ( , ) = 1 ( , ) ( , ) ( ) 0 ( , ) (19) Let ( , ) = ( , ) ( ) 0 . According to Eq. (7), th e probability t hat an information packet in inf ormation class is rece ived by a vehicle at time and is waiting in the que ue at current time ( > ) is ( ) . This implies that ( , ) is the density of information- holding vehicles at location and time . Differentiating ( , ) with respect to , we have ( , ) = ( , ) ( , ) (20) Let ( , ) denote the densit y of information-excluded vehicles at location at time . As informed vehicles consist of the information-holding, information-rela ying and information-excluded vehicles, ( , ) = ( , ) + ( , ) + ( , ) . Thereb y, we have ( , ) + ( , ) + ( , ) = ( , ) = ( , ) . (21) Substituting Eq. (19) and Eq. (20) into Eq. (21), yields ( , ) = ( , ) (22) According to the above analysis, we have the following IDE system: ( , ) = ( , ) ( , ) ( , ) ( , ) = ( , ) ( , ) ( , ) ( , ) ( , ) = 1 ( , ) ( , ) ( , ) + ( , ) ( , ) ( , ) = ( , ) (23a) (23b) (23c) (23d) For simpli city, we will label the IDE s ystem (23) as the susceptible-holding-rela ying-excluded (SHRE) model. It describes the instantaneous c hange in densities of v ehicles b y vehicle class for 13 dissemination of an information packet in informa tion class . Eq. (23) shows that susceptible vehicles become infor med vehicles at a ra te proportional to the densities of susceptible ve hicles and information - relaying vehicles (see Eq. (23a)). According to Eq. (23b), information-holding vehicles b ecome information-relaying vehicles at a rate inversel y proportional to . Thereby, if the assigned number of communication servers ( ) and the m ean communication service r ate ( ) are increased, information-holding vehi cles would become infor mation-relaying vehicles faster. This implies that the specific information packet of interest ex periences less waiting time in the queue. Hence, it can be propagated in the traffic stream at a higher speed. Eq. (23c) indicates that the densit y change o f information-relaying vehicle increases monotonically with respect to numb er of communication servers ( ) and the mean commu nication service rate ( ). According to Eq. (23d), the densit y change o f information-excluded vehicles is proportional to . Note 1/ denotes the mea n c ommunication service time of information packets of information class . If is smaller, the information packet would stay in the commination server for a longer time, impl y ing that it can be disseminated more times using the repetitive broadcast process. This will impact both the IFPW speed and asy mptoti c density of informed vehicles. Thereb y, w e c an control and to meet the application needs of information packets in information class . It is worth noting that Eq. (23d) can b e used to ch aracterize the dissemination wave of information packets in an arbitrary information class , . As = , we can assign different number of communication servers and mean communication service rates for di fferent information classes appropriately to meet their application nee ds simultaneously. Eq. (23) als o implies that if (i.e., 0 = , or ), the SHRE model becomes the susceptible-relaying-e xcluded model studied by Wang et al. (2018). It models the information flow dissemination wave under an information -relay control strategy where there is no queuing delay (i.e., no information-holding vehicles). 3.2 Modeling the traffic flow dynamics in the lower layer The uppe r-layer SHRE model describ es how the densit y o f vehicles b y vehicle class change s instantaneously du e to V 2V communications. I t capture s the impacts o f communication constraints on success rate of V2V communication s, a s a lso fac tors the effects of the queuing strategy and the distribution of information-relaying vehicles on the IFPW formation. As mentioned before, the IFPW is a combination of the inf ormation flow disseminati on wave and the traffic flow propagation wave. This section models the traffic flow dynamics to determine the traffic flow propagation wave. The effects of traffic flow dyna mics on IFPW are threefold. First, they impa ct the success rate of V2V communications (i.e., ( , ) ) by determining the number of equipped vehicles within communication range of an information-relaying ve hicle. Second, the number of th e vehicl es sen ding the specific information depends on the spatial distribution of information-relaying vehicles which evolves with the traffic flow dynamics. Third, the traffic flow spee d significantl y c ontributes to the IFPW speed. It adds to the IFPW speed in the direction of vehicular trave rsal and reduces the IFPW sp eed in direction opposite to tha t of vehicular traversal. In this stud y, the first -order L WR model is used to describe the traffic flow dynamics. It can reproduce some essential features of traffic flow, such as the formation and propagation of traffic flow waves. The mod el consists of the flow conservation law and an ex plicit density-flow relationship known as the fundamental diagram of traffic flow. The flow conserva tion law and the funda mental diagra m can be expressed as the following PDE model: 14 ( , ) + ( , ) = (24) ( , ) = ( , , ) (25) where ( , ) is the traffic flow density at location at time , ( , ) is the instantaneous flow, and ( , , ) is the fundamental diagram in which the flow and densit y are related by a continuous and piecewise differentiable equation. 4. Analytical and numerical solutions for the two-layer model This section discusses the anal y tical and numerical solutions for the two-layer model under homogeneous and heterogeneous tr affic conditions, respectively. Homogeneous traffic conditions refer to unidirectional traffic flow with uniform traffic flow density and the heterogeneous traffic conditions refer to the other traffic flow s ituations (e.g., bi-directional flow). Und er homogeneous traffic conditions, the traffic flow dynamics onl y shift the I FPW towa rds the direction of traffic flow and do not change the densities of vehicles of different classes. Thereby , the impacts of traffic flow d ynamics on the IFP W speed are uniform in space and time. The as y mptotic density of informed vehicles and the condition for existence of IFPW can be derived analytically using only the upper-layer SHRE model. Under hetero geneous tra ffic flow conditions, the traffic flow d ynamics change the densities of vehicles of different clas ses spatiotemporally. Thereby, the impacts of the traffic flow d yna mics on the IFPW speed are non-uniform in space and time. To obtain the solutions of the two-layer mod el under heterogeneous conditions, t he change in densit y of vehicles of each vehicle class due to V2V communications (in the upper la yer) and the traffic flow dynamics (in the lower la yer) need to be tracked simultaneously. To do s o, a numerical solut ion method is proposed he re to captu re the interactions between the upper and lower layers sequentially under discrete time and space settings. 4.1 Analytical solution of the two-layer model under homogeneous traffic conditions The propose d SHRE model conceptually adapts the idea of susce ptible-exposed-infected-recovered (SEIR) model that is extensively studied in epide miology (see McCluske y, 2012; Li and Muldowney, 1995; Li et al., 1999; Smith et al., 2001). The equilibrium solution and conditions for local stabilit y of the SEI R model are a nalyzed in these studies. Howe ver, the classical SEI R only a ddress the temporal spread of a disease among the population at one location. By compa rison, the designed SHRE model is a spatial model that s eeks to determine how a spe cific information p acket of int erest will be propagated in both space and time. T hereby, the solutions of SEIR model in previous epidemiological studies cannot be applied to the SHRE model. To the best of our knowledge, the solution of the IDE system ana logy to the SHRE model has no t been studied before. H ere, we d erive anal ytical solution for the as ymptotic density of vehicle s by vehicle class of the SHRE model and study the conditions for the existence of the IFPW. Let be the densit y o f equipped vehicles . Suppose at time 0, all equipped v ehicles are susceptible vehicles in the highway. Thereby, the initial conditions for the SHRE model are ( , ) = , ( , ) = ( , ) = ( , ) = . Assume the specific information packet of interest of information class i s generated and propagated by an equipped vehicle at location 0 and time 0. Similar to Kim et al. (2017) and Wang et al., (2017), under homogeneous traffic conditions, the information under the designed queuing strategy will quickl y form a wave (if it exists) to propagate backward and forward at a uniform speed. The asymptotic densit y of vehicles of each ve hicle class is the sa me beyond th e location where 15 the wave speed is stable. Howe ver, we cannot derive the anal ytical solutions for asymptotic speed of the IFPW. The IFPW speed will be solved for using the numerical method introduced in Section 4.2. As discussed in S ection 3.1, the communication ke rnel ( , ) characterizes the one-hop success rate of V2V communications. It significantl y impacts the traveling wave solutions. In this stud y, the Gaussian communication kernel in Eq. (26) proposed by Kim et al. (2017) will be used to c haracterize the one-hop success rate of V2V communication s, in which the parameter s and are calibr ated using V2V communication data obtaine d through NS-3 simulation. I t shows that the communication is subjec t to attenuation over distance. Also, it can be noted that the communication kernel satisfies ( , ) = ( , ) ∞ ∞ = . ( , ) = ( ) , > , < 1, (26) The asymptotic density o f ve hicles by vehicle class and asymptotic density of informed vehicles are defined as follows. Definition 1 (asymptotic density o f vehicles b y vehicle class): the as ymptotic density of vehicles of vehicle class ( ) , z , , , at location is defined as ( ) = lim ∞ z( , ) . Definition 2 (asymptotic density of informed vehicles): let ( ) be the as ymptotic densit y of informed vehicles at location , it is defined as ( ) = lim ∞ ( , ) . The following two theorems will be useful to analy z e the asymptotic density of informed vehicles. Theorem 1 (as ymptotic densit y of information-holding vehicles): if > , then ( ) = lim ∞ ( , ) = Proof : Let = ; multiplying both sides of Eq. (23b) by , we have ( , ) + ( , ) = ( , ) ( , ) ( , ) (27) This implies ( , ) = ( , ) ( , ) ( , ) (28) Then ( , ) ( , ) = ( , ) ( , ) ( , ) 0 (29) Note ( , ) . According to Eq. (23d), Eq. (29) can be written as ( , ) = ( , ) 1 ( , ) ( , ) 0 = ( , ) ( , ) ( , ) 0 (30) Note that as + ∞ , the densit ies of vehicles of different vehicle classes at each location become stable. Thereb y, lim ∞ ( , ) . For an arbitraril y small positive value , let ( < + ∞ ) be the value such that ( , ) < for > . Then 16 lim ∞ ( , ) = lim ∞ ( , ) ( , ) ( , ) 0 = lim ∞ ( , ) ( , ) ( , ) 0 + lim ∞ ( , ) ( , ) ( , ) ∞ (31) Note that ( , ) ( , ) is bounded when [ , ] . Thereby, ( , ) ( , ) 0 is bounded. This implies lim ∞ ( , ) ( , ) ( , ) 0 (32) As ( , ) < for > . Then lim ∞ ( , ) ( , ) ( , ) ∞ lim ∞ = (33) Note that is an arbitrarily small positive value. Thereby, ( ) = lim ∞ ( , ) = (34) Theorem 2 (asy mptotic density of information-relaying vehicles): if > , then ( ) = lim ∞ ( , ) = . Theorem 2 can be proved using the same method used to prove Theorem 1; it is omitted here to avoid duplication. Theorems 1 and 2 indicate that if > , there would be no information-holding and information- relaying vehicles at e ach location eventually. This is because when > , the specific informatio n packet of interest waitin g in the queue for infor mation class will have finite waiting time and finite communication se rvice time. It will enter into the communication serv er for propagation and is removed from it eventually. Let = , the following theorem discusses the asymptotic density o f information -excluded vehicles. Theorem 3 (as y mptotic density of information-ex cluded vehicles): if > , and > 1 , then ( ) = lim ∞ ( , ) = , where ( ,1 ) is the unique solution of the following nonlinear equation + 1 = (35) Proof : Under homogeneous traff ic c onditions, the traffic flow density is uniform. Hence, for arbitrar y time and location , we have ( , ) + ( , ) + ( , ) + ( , ) = (36) Note that ( , ) = ; according to Eq. (23d): 17 ( , ) = ( , ) 0 (37) Eq. (23a) implies that ( , ) = ( , ) ( , ) (38) Integrating both sides of Eq. (38) from to , we have ( , ) ( ) = ( , ) 0 ( , ) (39) Substituting Eq. (37) into Eq. (39), yields ( , ) ( ) = ( , ) 0 ( , ) = ( , ) ( , ) (40) Thereby, ( , ) = ( , ) ( , ) (41) Substituting Eq. (41) into Eq. (36), we have ( , ) ( , ) + ( , ) + ( , ) + ( , ) = (42) Let + ∞ , then ( ) ( , ) + ( ) + ( ) + ( ) = (43) Note that ( ) ( , ) = ( ) , and according to Theorems 1 and 2, ( ) = ( ) = . Then ( ) + ( ) = (44) Let = ( 1 ) ( ) . As ( ) [ , ] , ( ,1 ) . Eq. (44) can be rewritten as + = 1 (45) For simplicity, denote the function as = + 1 (46) Note that = = + 1 (47) According to Eq. (47), | 0 = + 1 < for > 1 . As ( ) = , this implies that < for sufficiently close to 0. Note that ( 1 ) = > . Hence, there must exist a solution to Eq. (45) for ( ,1 ) . The second-order de rivative of with respect to is = = > . Thereb y, is a convex function. There exist s at most two solutions for = . = is a solut ion to = . This im plies that there exists a unique solution to = for ( ,1 ) . Let be the corresponding solution. W e have ( ) = . Theorem 3 is proved. Recall ( ) = ( ) + ( ) + ( ) , and ( ) = ( ) = . We have the following c orollary. 18 Corollary 1 : The asymptotic density of informed vehicles is ( ) = ( ) = . According to Eq. (34), is determined only b y the value of which equals . Thereby, when the communicatio n frequency ( ), the pa rameter in the communication kernel and the initia l density of equipped veh icles ( ) are fixed, the service rate can be leveraged b y transportation operators to propagate the specific information in information class to control the proportion of vehicles that can receive the specific information. Let be the information spread (i. e., proportion of info rmed vehicles) for the specific information pa cket of interest in information class ; we have = = . The following theorem discusses the existence of the IFPW. Theorem 4 (conditions for existence of IFPW): The IFPW does not exist when < 1 . Proof : Note for [ ,1 ] , = = + 1 > + 1 > (48) Thereby, increases monotonically with respec t to for ( ,1 ) . As ( ) = , there exists no solution to = for ( ,1 ) . This i mplies that the ve hicles are far from the location (location is labeled as ) where the inf ormation packet is generated, and the asymptotic solution of ( , ) is 0. As all informed vehicles will become information- excluded vehicles, this result indicates that no vehicle can receive the specific information packet of interest of information class if the y are far from the location where the information is generated in this case. Thereby, the IFPW does not exist for < 1 . Theorem 4 sho ws that if the initial densit y of eq uipped vehicles and the service rate are high, the specific information packet of interest can onl y be propagated locall y. Vehicles that are far from the location where the specific information is generated cannot r eceive it. This property can be used by transportation operators to design effective contr ol strategies to propagate information within a small vicinity (e.g., sudden b raking information, lane merge information). It shoul d be noted th at will impact the propagation distance of the specific information of interest whe n the IFPW does not exist . Through a numerical example, we will show that if is set such that is closer to 1 ( < 1 ) , the specific information of interest w ill be propagated further away . If > 1 , the specific inf ormation packet will form a wave to be propagated in the network. As discussed earlier, we cannot derive an analytical solution for the asymptotic I FPW speed eve n if it exists. The I FPW spee d will be computed using the numerical method introduced in the nex t section. Note that the asymptotic IFPW spe ed is signific antly impacted b y the queuing delay which is determined by the two control parameters (i.e., and ) simultaneously. To meet the application needs of information in a n arbitrary information c lass related to information spread, time delay to re ach a target location and spatial coverage, the values for the two control parameters and can be determined as follows: first, choose appropriately according to Theorem 4 if the information needs to be only propagated locally. If the information needs to be propagated in the network, then determin e appropriately according to Theorem 4 and corollary 1 so that information spread can be satisfie d. Third, determine appropriately to control the IF PW speed so that it can reach the target location in the desir ed time. 4.2 Numerical solution method The analytical solutions for the various information classes introduced in previous section onl y apply to homogeneous traffic c onditions. Under heterogeneous conditions, the IF PW may not be stable du e to the 19 non-uniform impact of traffic flow d yna mics on information dissemination. To anal y ze how info rmation is spread in space and time under heterogeneous condi tions, this section proposes a numerical solution method based on Kim et al. (2017) to solve the two-la yer mod el. The numerical solution method hel ps to: (1) estimate the IFPW speed under both homogeneous and heterogeneous traffic conditions, and (2) estimate the distance the specific information can be propagated when the I FPW doe s not ex ist, unde r both homoge neous and heterogeneous tra ffic conditions, and (3) estimate the densit y of informed vehicles under heterogeneous conditions. The numerical solution method discretizes space and time into cells of length and time interval , respectivel y. Let 1,2,3 denote the cells in the highwa y sequentially. The fourth-order Runge-Kutta method will be used to approximate the densities of vehicle s by vehicle class (i.e., ( , ) , ( , ) , ( , ) and ( , ) ) c hanged according to the SHRE model in the upper layer. To solve the LWR model in the lower layer, the generalized c ell transmission finite difference method proposed by Daganzo (1995) is used to approximate Eq. (24) and Eq. (25) as follows [ ( , + ) ( , )] = [ ( , ) ( , )] (49) ( , ) = min ( , ) , ( + , ) , (50) where T spec ifies the ma ximum flow that can be sent by the upstr eam cell and Q specifies the max imum flow that can be received by th e downstream cell. is the jam traffic d ensit y . Let denote the unequipped vehicles. The steps to solve the two-layer model numerically are as follows: Step 1: At time 0 ( = ), obtain the initial number of vehicles of each class , { , , , , } and corresponding density of vehicles of each vehicle class in each cell. Let = + . Step 2: Solve the lower-layer model to determine the flow in each cell (i.e., ( , ) ) that advances to the downstream cell according to Eq. (49) and Eq. ( 50). Update the number of vehicles in each cell. Step 3: Calculate the number of vehicles of each class { , , , , } that advance to the downstream as follows: ( , ) = ( , ) ( , ) ( , ) , , , , , , (51) where ( , ) is the traffic flow of class leaving cell at time interval and ( , ) is the density of class in cell and time . Step 4: Update the densit y of vehicles b y vehicle class in each cell of the u pper la yer using th e discrete multiclass flow conservation law, as follows: [ ( , ) ( , )] = [ ( , ) ( , )] , { , , , , } . (52) where ( , ) , ( , ) , ( , ) and ( , ) represents ( , ) , ( , ) , ( , ) and ( , ) , respectivel y that describe the density of vehicles of each class in the upper layer. Step 5: Approximate the density of vehicles by vehicle c lass (i.e., ( , ) , ( , ) , ( , ) and ( , ) ) that are changed according to the SHRE model in the upper la yer. Step 6: If the predetermined time length is reached, then stop. Otherwise, l et = + , and go to S tep 2. The numerical method solves the discretized LWR model and the SHRE model sequentially to capture the effects o f tr affic flow dynamics on information dissemination. I t is worth notin g that to reduce computational load, the convolution term ( ( , ) ( , ) Ω ) in Eq. (23) can be approximated using the Fast Fouri er T ransform (FFT) method. More details of the numerical method and the FFT 20 method can be found in Kim et al. (2017). The numerical method can provide the density of vehicles by vehicle class at each cell and time interval. The numerical method can also be used to verif y the analytical solutions of densit y of informed vehicles a nd to a pproximate the I FPW speed under both homogeneous and heterogeneous traffic conditions. Note that IFPW consists of two waves: the for ward wave which travels in the direction of vehicular traversal and the backward wave whic h travels opposite to the direction of vehicular traversal. Correspondingly, there exist two I FPW speeds, th e forward and backward IFPW speeds. The method to estimate the two IFPW speeds is as follows. Let and be two arbitrar y time intervals. W ithout loss of generality, let > . Let ,0 be the density of vehicles in an arbitrary v ehicle class . ,0 is set between the mi nimum an d maximum densit y of v ehicle class . Then, at the two time intervals , = 1,2 , there exist two cells on the two wave fronts, respectivel y, for which the densit y o f vehicle class is most close to ,0 . Denote the two cells as , and , ( = 1, 2 ), respectively. Without lo ss of generality, let , be the cell in the backward I FPW a nd the , be the cell in the forward IFPW. Then, the forward IFPW (labeled as ) and the backward IFPW (labeled a s ) can be approximated as = , , (53) = | , , | (54) 5. Numerical experiments This section discusses several numerica l experiments to illustrate the application of the propo sed method to control multi class information flow p ropagation. Consi der a highway with 30 km length. Discretize the highway uniformly into 2000 ce lls. Table 1 shows other inputs in the experiment. Table 1. Experiment parameters Traffic flow pa rameters Value Free flow speed ( ) 108 km/h Time interv al ( ) 0.5 seconds Cell length ( ) 15 meters Number of lanes 1 Market penetrat ion rate ( W ) 50% 5.1 Calibration of the communication kernel To calibrate the communication kernel function in Eq. (26), NS -3 will be used to simulate the success rate of one-hop V2V communications under different traffic flow densities. NS-3 is a discrete network simulator that can simulate and test a spectrum of communication protocols efficientl y. Recently, N S -3 has been used to simulate V2V communic ations and evaluate the performance of communication protocols for vehicular ad hoc networks (see e. g., De y et al., 2016; Noori and Ol yae i., 2013; T alebpour et al., 2016). The inputs for the V2V communication related p arameters in NS-3 ar e shown in Table 2. The simulation is operated based on IEEE 802.1 1p protocol in 5.9 GHz band with channel capacit y 3 Mbps and communication power 500 m. I n V2V communications, whether a receiver vehicle can successfully receive an information packet from a sender vehicle is prima ril y decided by two factors: t he reception si gnal power, a nd the noise and interference. The reception si gnal power determines wh ether the receiver vehicle can re ceive the signals from the sender vehicles, and the level of noise and 21 interference d etermines the proba bility of recepti on error. In this simulation, the Friis propagation loss model (Benin et al., 201 2) is used in NS-3 to calculate the reception si gnal power. I t characterizes the impacts of transmission power, distance between receiver and s ender, transmission gain, and reception gain on reception signal power. The receiver vehicle receives the information packet onl y if the reception signal power is larger than the energy det ection threshold 96 dBm. To estimate the noise and interference, the signal to (inte rference and) noise ratio (SINR) model is used in NS-3 simulation. The SINR is the ratio of the power of a certain si gnal o f interest over the sum o f the interf erence power ( from all the other interfering s ignals) and th e power of some bac kground noise (for details, see W ang et al. 2018). The threshold of S INR is set as 5 dB (Hisham et al., 2016; Hisham et al., 2017), i ndicating that the V2V communication is considered to be successful if S INR is larger than 5 dB; otherwis e, it will be considered as a communication failure. Table 2. Inputs for NS-3 parameters Parameters Value IEEE 802.11p channe l capacity 3 Mbps Band 5.9 GHz Comm unication frequency 2 Hz Comm unication power/distance 500 m Minimum contention window 15 slots Energy detec tion threshold -96 dBm Noise floor -99 dBm SINR threshold 5 dB Table 3. Maximum number of communication servers, and calibrated pa rameters in communication kernel using NS-3 simulation Density (veh./km ) 10 20 30 40 50 60 70 80 90 100 a 0.362 0.351 0.313 0.292 0.267 0.258 0.216 0.199 0.176 0.153 b 0.621 0.576 0.531 0.499 0.434 0.392 0.357 0.291 0.268 0.243 125 62 41 31 25 21 18 15 14 12 Recall that all equipped vehicles withi n communication range are assumed to share the bandwidth equally. Suppose the single unit of an information packet is 500 bytes. To prevent information congestion effects that would occur if the channel capacity is full, the maximum number of communication servers can be calculated as follows = 2 . where is the communicati on ra nge, is the c hannel ca pacity (3 Mbps), is the market penetration rate o f V2V-equipped vehicles (50% in this study). is the information packet size (500 b ytes), a nd is the traffic flow density. The operator [ ] means the largest integer less than . The calculated values for different traffic flow densities are shown in Table 3. The y will be used as the total number of communication servers under the corresponding traffic flow densities. To account for the impa ct s of positions of vehicles on success rate of V2V co mmunication s, vehicles are assumed to be randoml y distributed along the 30 km highway. The simulation is conducted for 30 mi nutes, and is repeated 100 22 times. The calibrated parameters in the communication kernel are presented in Table 2. Fig ure 3 illustrates the simulated success rate of one -hop propagation and calibrated communication kernels at = 4 veh/h and = 6 veh/h. The R -squared values of the calibrated communication kernel at = 4 veh/h and = 6 veh/h are 0.96 and 0.94, re spectively, i ndicating that the c alibrated communication kernel robustl y captures the relationship between success rate o f one -hop propagation and the dista nce of the sender vehicle to the receiver vehicle. In ad dition, for the same distance, the success rate of o ne - hop propagation at = 6 veh/h is less than it is at = 4 veh/h. This because the co mmunication interference increases if more vehicles are located within the communication range of a sender vehicle, causing greater communication failure. Figure 3 . Calibrated communication kernel for = 4 veh/h and = 6 veh/h 5.2 IFPW under homogeneous conditions 5.2.1 Asymptotic density of informed vehicles and IFPW speed The following example shows how to calculate the as ymptotic de nsity of informed v ehicles analytically under homogene ous conditions. Suppose the traffic flow density is 40 veh/h, and th e market penetration ra te of e quipped vehicles is 50%. Then, for eac h cell, the number of equipped vehicles is 0.3 veh/cell ( ) . Ac cording to Table 3, the parameters and in Eq. (26) are 0.292 and 0.499, re spectively. Suppose the specific information of interest is from information class . Assume the number of communication servers ( ) assig ned to send the information packets in information class is 11 and the corresponding mean communication service rate is 0.05 packet/sec onds (i.e., mean service time is 20 seconds). Note = 11 × . 5 .5 = . 5 > and = = 2 × .499 × .5 0. 0.0 = 2.994 > 1 . According to Theorem 4 and Corollary 1, the asymptotic density of infor med vehicles exists. Corollar y 1 indicates that ( ) = .3 , where is the unique solution of the nonlinear solution . 8 + 1 = for [ ,1] . Using Newton method to solve the nonlinea r equ ation, we have = .9613 . Thereb y, the asymptotic densit y o f informed vehicles is ( ) = .3 .9613 = .2 vehicel/cell = 19.2 / . The information spread (proportion of informed ve hicles) is = = .9613 . Figure 4 compare s the information spre ad o f the s pecific information packet of information class under different traffic flow densities at = 11 and = . 5 packets/second. It sho ws that the numerical solutions overlap with the analytical sol utions, impl y ing that the numerical algorithm prop osed 0 0 .1 0.2 0.3 0 .4 0.5 0 0.2 0.4 0.6 0.8 1 Dis t ance ( k m ) Suc ce s s rate of one- hop pr opa g ati on N S - 3 S im ul a t ion ( k = 40 veh/km ) Ca l ibr at e d k er nel( k = 40 veh/k m ) N S - 3 S im ul a t ion ( k = 60 veh /km ) Ca l ibr at e d k er nel( k = 60 veh/k m ) 23 in Section 4.2 can effectively solve the two-la yer model. Figure 4 also demonstrates that when traffic flow densit y increases, the information spread a lso increases as more vehicles will propagate it in an unit of time. This indicates that under higher traffic flow density scenarios, the mean c ommunication service rate of information packets of class can be reduced for the same information spread. Figure 4 Information spread at = 11 and = . 5 under different traffic densities Suppose the traffic flow density is 40 veh/h and the specific information packet of interest in information class is generated by a vehicle at time 0 and location 0. L et = .5 packets/second, = 2 and = . 3 pa ckets/second. Figure 5 shows the spatial distribution of densit y of vehicl es b y vehicle classes at = 15 seconds and = 23 seconds. It indicates that the IFPW can form the sa me shape to move forward and bac kward. Most of the information -holding and information-rela ying vehicles are located close to the wave front. This is because when < and > , the information packet in information class will experience finite queuing dela y and communication service time. Thereby, the vehicles that receive the sp ecific information packe t of interest a long time ago will exclude it from the system. The in formation-holding and in formation-rela y in g vehicl es will become in formation- excluded vehicles eventually. Figure 5 . Density of vehicles by vehicle c lass at = 15 seconds and = 23 seconds 0.7 0.75 0.8 0.85 0.9 0.95 1 10 20 30 40 50 60 70 80 90 100 Information spread Density (veh/h) Numerical Analytical F o rw a rd IF P W Ba c k w a rd IF P W Density (veh/km) Distance (k m) F o rw a rd IF P W Ba c k w a rd IF P W -15 -10 -5 0 5 10 15 20 25 0 5 10 15 20 25 I ( x, 150) H ( x, 150) R ( x, 150) E ( x, 150) -15 -10 -5 0 5 10 15 20 25 0 5 10 15 20 25 I ( x, 230) H ( x, 230) R ( x, 230) E ( x, 230) 24 Figure 6 . Density of information-relaying vehicles in space and time at = 4 / To analyze the asymptotic IFPW speed, Fi gure 6 shows the spa tiotemporal distribution of de nsity of information-rela ying vehicles. It illustrates that the specific information packet of interest of information class is propagated backward and forward at a uniform speed reached onl y a few seconds after it is genera ted. To numerically estimate the IFPW speed, Figure 7 shows the spatial distribution of density o f information-excluded vehicles at = 15 seconds and = 23 seconds. Let 0 = 1 / be the reference density in Eq. (53) and Eq. (54). According to F igure 7, the cells whose de nsities of information-relaying vehicles in the backward and forward IFPWs are most close to 0 at = 15 seconds are loc ated at 2. 5 km and 11. 55 km, respectively . The cells whose densities of information-relaying vehicles in the backward and forward IFPWs are most close to 0 at = 23 seconds are located at 4. 75 km and 1 .645 km, respec tively. Acc ording to Eq. (53) and Eq. (54), the forward and backward IFPW speeds can be estimated as: = , , = 2. 5 + 4. 75 15 23 = . 94 / = 341 / = | , , | = 2. 5 + 4. 75 15 23 = . 34 7 / = 125 / Figure 7 . Density of information-excluded vehicles at = 15 seconds and = 23 seconds Evolution period -15 -10 -5 0 5 10 15 20 25 0 5 10 15 20 Distance (km) Density (veh/km) E ( x ,150) E ( x ,230) 25 5.2.2 Scenarios where the information packet can be propagated only locally (a) (b) Figure 8 . Scenarios for which the information packets are propagated only locall y: (a) Density of information-relaying vehicle in space and time for = 2 and = .323 ; (b) Density of information-relaying vehicle in space and time for = 2 and = .9 . As Theorem 4 indi cates, the I FPW does not exist when the mean communica tion service rate is high enough such that < 1 . In this case, the specific information packet in information class can be propagated onl y locall y. This property can be leveraged to send information packets in a small vicinit y of where the y are generated. The following example seeks to demonstrate ho w to control the propagation distance by leve raging communication service rate when informatio n is propagated locally. Suppose the traffic flow d ensity is 40 veh/h, the avera ge a rrival rate of information packets of information class is 2 packets/second, and the number of assigned communication servers for information class is 20. Let the densit y of information-relaying vehicles at location 0 and time 0 be 11 veh/km and 0 elsewhere. Figure 8(a) and Figure 8(b) show the spatiotemporal distribution of density of information -rela ying vehicles at = .323 and = .9 , respectivel y. Note < 1 in both cases. Figure 8 il lustrates that the density of information-rela y ing vehicles decreases to 0 in spac e and time . Recall onl y information - relaying vehicles can p ropagate th e specific in formation packets of interest. This implies that the specific information packet can onl y b e propaga ted locally. Vehicle s far a way fr om location 0 where the specific information packet is generated will not receive it. It c an be noted that the densit y of information-rela ying vehicles decreases to 0 at 350 meters a nd 150 meters downstream of location 0 at = .323 and = .9 , respec tivel y. This implies the information pac kets can be propagated further awa y under a lower communication service r ate. Thereb y, the mean communication service rate can also be lev eraged to propagate information to different distances. 5.2.3 Integrated impacts of and on asymptotic IFPW speed and density of informed vehicles Suppose the traffic flow density is 50 veh/km, and the arrival rate of the information packets in information class is 1 packet/second. To an alyze the impacts of and on IFPW speed and densit y of informed vehicles, is varied from 0.05 packets/second to 0.25 pa ckets/second. According to M/M/ queuing theory, to enable propagation of the specific information packet of information class , must be less than 1. The reby, the minim um number of communication servers assigned to send information packets of information class are 21, 11, 7, 6, 5 for = . 5 , 0.1, 0.15, 0.2 ,0.25, respectively. Figure 9 shows the as ymptotic fo rward IFPW speed for v arious values o f and . It shows that when is fix ed, the as ymptotic forward IFPW speed increases monotonicall y with r espect 26 to . This is because as more communication se rvers are assigned to inf ormation class , the mean waiting time of the specific information packet in the queue will reduce (see Fi gure 10). Thereby, it can be transmitted faster b y the informed vehicles. Figure 9 also shows th at fo r a fix ed , the IFPW spe ed decreases monotonicall y with respect to mea n communication service rate in most cases because an increase in mea n communication service rate w ill reduce the transmission duration of the packet. However, in some cases (e.g., = 22, 23, etc.), increase in may decrease the forward IFPW speed. This is because for a fixed , increase in will increase the mean waiting time in the queue (see Figure 10). Thereb y, unlike that of the number o f communica tion serv ers, the effect of mean c ommunication service rate on the IFPW speed is more intricate. The proposed method in this study aids in determining the appropriate mean communication service rate for each information class to satisf y its application needs in terms of propagation performance. Figure 9 . Impacts of and on asymptotic forward IFPW speed of an information packet of information class Figure 10 . Mean waiting time of information packets in the queue for various values of and Figure 11 shows the information spread of the specific information of interest under different communication service rates. As the value of increases, information spread decreases monotonically, implying that less number of vehicles will rece ive the specific information of interest. This is because an informed vehicl e will exclude the specific information packet o f interest from the communication servers faster under higher mean c ommunication service ra te. I t is worth mentioning that the number of communication servers has no eff ect on information spread. Thereby, to design effective control strategies for propagating information packets in diff erent classes, the m ean communication service rate 5 7 9 11 13 15 17 19 21 23 25 10 0 15 0 20 0 25 0 30 0 35 0 40 0 n j Asympt o tic f orw a rd I FP W spee d (km/h) u j = 0.05 u j = 0.1 u j = 0.15 u j = 0.2 u j = 0.25 5 10 15 20 25 0 5 10 15 20 n j Mean w a i t ing time (sec on ds) u j = 0.05 u j = 0.1 u j = 0.15 u j = 0.2 u j = 0.25 27 can be determined first to obtain the desired information spread. Th en, the appropriate number of communication serve rs can be determine d to be assigned to diffe rent information c lasses to c ontrol their propagation speed. Further, Figure 11 shows that the numerical solutions are almost identical to the analytical solutions. Figure 11 . Comparison of numerical and analytical solutions of information spread for different values of 5.3 Control of multiclass information f low propagation under homogeneous and heterogeneous traffic conditions 5.3.1 Control of multiclass information flow propagation under homogeneous traffic conditions This se ction a naly zes the control of multiclass info rmation propagation to meet application needs o f various classes simultaneousl y. Rec all t hat the queuing system for each information class is indepe ndent. Thereby, the number of communica tion servers and the mean communication service rate c an be controlled for each information class to achieve desired propagation performance related to informa tion spread (related to d ensity of info rmed v ehicles), time dela y bounds ( related to IFPW speed) and sp atial coverage (related to existenc e of I FPW). Suppose traffic flow densit y is 50 veh/km and information from three infor mation classes (labe led information class 1, 2 and 3) is propag ate d over the tra ffic stream. L et information class 1 contain “ urgent ” information (e.g., tr affic accident blocks the freewa y link fully). It is desirable for this information to reach all upstream and downstrea m vehicles with low latency. Information class 2 is constituted by less urgent information ; for example, routin g information. It is delay-tolerant and is e xpected to reach a lower proportion of equipped vehicles compared to information class 1 to avoid congestion in other routes. I nformation class 3 contains information with limited i mpact area, which needs to be p ropagated locall y, for ex ample, information of sud den braking of a v ehicle, lane merge information, etc. Suppose the mean arrival rate of information packets of information class 1, 2 and 3 are 0.3, 0.8 and 1.2 packets/second, respectivel y. According to Table 3, the total numb er of communication servers t hat can be assigned unde r traffic flow densit y 50 veh/km is 25. Let the number of communication se rvers assigned to information classes 1, 2 and 3 be 12, 8 and 5, respectively . The mean communication service rates are set correspondingly a s = . 5 packets /second, = .2 packets/second, and = .4 packets/second. Note that > 1, > 1 , and < 1 . According to Theorem 4, the I FPW exists for propaga tion of infor mation packe ts of information classes 1 and 2 while it does not exist for information packets of class 3. 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 0.05 0.1 0.15 0.2 0.25 Inform ation spread Numerical Analytical 28 Figure 12 compares the forward a nd bac kward IFPW speed of information c lass es 1 and 2. It shows that both forward and backward I FPW speeds of information class 1 are greater than those of information class 2. I n a ddition, the proportion of vehicles (information spread) informed with the packe ts of information class 1 and information class 2 are 99.8% and 65.6%, respectively. Thereby, under the designed control strategy, packets from information class 1 can reach more number of vehicl es with lower tim e delay compa red to pack ets from info rmation class 2. Figure 13 shows the contour of the density o f information-rela ying vehicl es. It indi cates that vehicles rela ying the specific information packet of information cl ass 3 decreases dramatically with space and ti me. The spe cific information packet is almost excluded by all vehicles be yond the locations 480 meters downstream and 200 met ers upstream of its point of orig in (i.e., location 0). Thereb y, the information packets of class 3 are only propagated to a small area. Figure 12. Comparison of forward and backward propagation speeds of information classes 1 and 2 Figure 13. Contour of density of information-relaying vehicles of information class 3 5.3.2 Control of multiclass information flow propagation under heterogeneous conditions This section address the control of information flow propagation under heterogeneous conditions. Similar to Kim et al. (2017), consider that a tr affic accident happens at time 0 on a unidirectional highwa y with a traffic flow density of 50 v eh./km. As illustrated b y Figure 14, the incident occurs at locatio n A. It reduces the link capaci ty by one third for 4 mi nutes before it is cleared. The con gested traffic and the free flow traffic departing fr om the incident occurrence location are separated by L ine AB. The 0 50 100 150 200 250 300 350 400 450 Speed (km /h) Information c lass 1 Informati on class 2 Forward speed Backward speed Dis t ance ( k m ) Time (minutes ) 0.2 0.3 0.6 0.8 1 2 3 6 10 0.2 0.3 0.6 0.3 0.2 0.6 - 0. 3 - 0.2 - 0.1 0 0.1 0 .2 0 .3 0 .4 0.5 0.6 2 4 6 8 10 12 14 2 4 6 8 10 12 29 occurrence and clearance of the incident induce two forward propagating traffic waves denoted by lines AD and BF, respectivel y. After the incident occurs, vehicles are jammed at t he incident location, lead ing to a traffic wave propagating backward. Figure 14. Contour of traffic density Suppose information packets of three different information classes are generated at location C, and their arrival rates are identical. We label them information classes 1, 2, and 3. Information classes 1 and 2 contain routin g information and are ex pected to reach th e same numb er of equipped vehicl es. However, information packet of class 2 is ex pected to be propagated faster than infor mation packet of class 1 as it contains information related to the traffic accident, which requires more immi nent response from the vehicles. Information class 3 contains informatio n related to the level of tra ffic congestion induce d by the traffic accident. Hence, information packets of class 3 are ex pected to be received by all vehicles in the impacted area. To achieve these objectives, l et the number of communication servers assigned for information classes 1, 2 and 3 be 5, 10 and 10, respectively. The mean communication service ra tes for the three information classes are = .15 packets/second, = .15 packets/second, and = . 6 packets/second. The numerical solution method will be used to calculate the information propagation speed and the proportion of informed vehicles (information spread) for the three information classes. Figures 15 (a) and 15(b) compare the backward a nd forward I FPW speeds of information classes 1 and 2, respectively. Th ey illustrate that information packets in both c lasses are propagated ver y fast in the uncongested area which is not impacted by the traffic accident (see stage s and in Figures 15(a) and (15b), respectively). The propagation speed decrease s significantly when the information packets arrive at the con gested area induced b y the traffic accident (stage s and in Figures 15(a) and (15b), respectively). This is because higher traffic density of vehicles can increase communication interf erence, causing significant c ommunication failures. The IFPW speed is recovered to the original value when the congested area is pass ed to catch up with the no rmal traffic (stages and in Figures 15(a) and (15b), respectively). It is important to note that information pac kets in infor mation c lass 2 are propagated faster than those in infor mation class 1. For example, the information pac kets of information class 1 take about 4 minutes and 5 mi nutes to reach the points G and H located at 9 km and 30 km, respectively. In comparison, it only t akes 2 mi nutes 40 seconds and 4 minutes for information pa ckets of information class 2 to reach the two locations, respectivel y. These results indicate that under heterogeneous conditions, controlling the number of communication servers assigned to each information class can significantly impac t the time delay of the information packets to reach the targeted locations. Figures 15(a) and 15(b) also rev eal that the inform ation spread (i.e., ) is the same in space and time. This D i s t a n c e ( k m ) Ti m e ( m i n u t e s ) 9 12 15 18 21 24 27 30 1 2 3 4 5 6 7 8 F D A B C 0 20 40 60 80 10 0 T raf fic direction 30 implies that the number of communication servers only impacts the pr opagation speed, but not the asymptotic proportion of informed vehicles. (a) (b) Figure 15. Contours of proportion of information-excluded vehicles of information packets of information classes 1, 2 and 3: (a) information class 1; (b) information class 2; (c) information class 3 Figure 15(c) shows that = .996 , im plying that almost all equipped vehicles can rece ive information packe ts of class 3. Note that the number of assi gned c ommunication servers for information classes 2 and 3 are id entical. Figures 15(b) and Figure 15(c) indicate th at smaller mean communication service rate will enable more number of vehicles to receive the specific information packet in corresponding information c lass. However, it may reduce the for ward and backward propagation spe eds. Figure 15(c) shows th at it takes longer time fo r info rmation packets in information class 3 to be deliv ered at locations G and H, compared to those of inf ormation class 2. This is because reducing the mean communication service rate will increase the mean waiting time of information packets in the queue. Thereby, under the designed sc enarios, the information propag ation sp eed is reduced due to increased mean waiting time. The proposed method in this stud y can aid transportation operators to determine the mean communication service rat e and the number of commu nication servers assigned to each information class to control the information propagation performance u nder both homogeneous and heterogeneous traffic conditions. D i s t a n c e ( k m ) T i m e ( m i n u t e s ) 9 12 15 18 21 24 27 30 1 2 3 4 5 6 7 8 0 0 . 2 0 . 4 0 . 6 0 . 8 1 D i s t a n c e ( k m ) Time (minu t es) 9 12 15 18 21 24 27 30 1 2 3 4 5 6 7 8 0 0.2 0.4 0.6 0.8 1 H G H G D i s t a n c e ( k m ) T i m e ( m i n u t e s ) 9 12 15 18 21 24 27 30 1 2 3 4 5 6 7 8 0 0 . 2 0 . 4 0 . 6 0 . 8 1 H G 31 6. Conclusions The traffic information p ropagated in a V2V -based traffic s ystem can be grouped into differ ent classes based on applica tion nee ds related to information sprea d, time delay bounds, and spatial coverage. To meet these ne eds of multiclass information under different tr affic flow and communication environment s, this stud y proposes a queuing str ategy for equipped vehicles to propagate the received info rmation packets. The queuing strategy enables control for multiclass information pr opagation by leveraging t wo control parameters, the number of communication servers and the me an communi cation service rate. The spatiotemporal propagation of information in different information classes unde r the designed queu ing strategy is ch aracterized by a two-l ayer analytical model. The upper la yer is an I DE s ystem de rived to model information diss emination under the d esigned queuing str ategy, and a LWR mod el is used i n the lower la ye r to describe the traffic flow d ynamics. An analytical solution of asymptotic density of informed vehicles is d eveloped under homo geneous traffic conditions. It helps to anal yze the relationship between th e density of informed vehicles and the two control parameters in the queuing str ategy. In addition, the necessary conditions for existence of I FPW are derived. It describes the conditions under which the spec ific inform ation packets will be propagated onl y lo cally. A numerica l solut ion is proposed to solve the two-la yer m odel to estimate the IFPW speed, which helps to estimate the time dela y f or an information packet to reach the target location. Numerical experiments using the propose d model suggest that the mean communication servic e rate significantly impac ts the asy mptotic density o f informed vehicles. Also, all else being e qual, an increase in the number of communication servers assi gned to an information class will increase the IFPW s peed of the information packets in this information class. In addition, information will be propagated o nly locally under a high communication service rate because each information packet has little transmission duration. These findings provide valuable insi ghts for controlling the propagation of multiclass information to achieve desired operational perfor mance in a V2V-based traffic s ystem. That is, the y provide valuable tool s to a traffic control c enter to target different info rmation-based solutions for different tr affic-related p roblems that arise regularly in urban a reas. For example, they can be used to disseminate area-wide controlled information dissemination strategies to manage traffic conditions under a severe accident, and to simultaneously manage the impacts of a work zone by ensuring information (of a different class) is disseminated to vehicles in onl y a certain vicinit y of it , thereb y enabling v ehicles to seamlessly receive and propagate multiclass information . Hence, this stud y can be leveraged to develop a new ge neration of information dissemination strate gies focused on enabling specific V2V -based applications for traffic situations that arise on a daily basis. This study can be extended in a few directions. First, analytical solutions of the IFPW speed c an be derived to provide insights on the relationship between the two control parameters in the queuing strategy and the resulting IFPW speed of information pa ckets in each information class. Second, this stud y only considers control of infor mation flow propagation in a corridor. The performance o f the proposed method on control of network-level information flow propagation needs to be inv estigated. Third, this stud y assigns the received infor mation packets in to different queues according to the information classes they belong to. I t assumes that the number of available communication servers is lar ger than the number of information classes. Thi s assumption may not hold in sc enarios of hi gh traffic d ensity, where the maximum number of information pa ckets (i.e., ) a n equipped vehicle can be transmit in one -hop propagation is small due to information congestion (Wang et al., 2018). To address this, other queuing strategies such a s preemptive priorit y and non-pree mptive prior ity queuing sy stems will be deve loped to control the propagation of information of different information classes. 32 Acknowledgements This study is based on research supported b y the Center for Connecte d and Automated Transportat ion (CCAT) Region V Universit y Tr ansportation Center funded b y th e U.S. Department of Transportation, Award #69A3551747105. The third author is partl y supported b y th e Natural Science Foundation of China (71701108), and the Natural Science Foundation of Zhejiang Province (LQ17E080007). Any errors or omissions remain the sole responsibility of the authors. References Benin, J., Nowatkowski, M., Owen, H., 2012. Vehicular network simulation propagation loss model parameter standardization in ns-3 and beyond. 2012 Proceedings of I EEE Southeastcon, Marc h, pp. 1-5, Florida, USA. Daganzo, C. F., 1995. A finite diff erence a pproximation of the kinematic wa ve model of traffic flow. Transportation Research Part B: Methodolog ical, 29 (4), 261 – 276. Dey, K.C., Rayamajhi, A., Chowdhury, M., Bhavsar, P., Martin, J., 2016. V ehicle-to-vehicle (V 2V) and vehicle-to-infrastructure (V2I) communication in a hetero geneous wireless network – Performance evaluation. Transportation Researc h Part C: Emerging Technologies, 68, 1 68-184. Du, L., Dao, H., 2015. Information dissemination delay in vehicle -to-vehicle communication networks in a traffic stream. IEEE Transactions on Intelligent Transportation Systems, 16 (1), 66-80. Du, L., Gong, S ., Wang, L., Li, X., 2016. Information-traffic coupled cell transmission model for information spre ading dy namics over ve hicular ad hoc network on road seg ments. Transportation Research Part C: Emerging Technologies, 73, 30-48. Gross, D., Shortle, J . F., Thompson, J. M., Ha rris, C. M., 2008. Fundamentals of queuing theo ry, 4th Edition. John Wiley & Sons. Hisham, A., Ström, E. G., Brännström, F., Yan , L., 2017. Scheduling and power control for V2V broadcast communications with adjacent channel interferenc e. arXiv prepri Hisham, A., Sun, W., Ström, E. G., Brännström, F., 2016. P ower control for broadcast V2V communications with adjacent carrier interference effects. IEEE International Conference on Communication, May, pp.1-6, Kuala Lumpur, Malaysia. Kim, Y. H., Peeta, S., He, X., 2017. Modeling the information flow prop agation wave under vehicle-to- vehicle communications. Transportation Research Part C: Emerging Technologies, 85, 377-395. Kim, Y. H., Peeta, S., He, X., 2018. An anal ytical model to characterize the spatiotemporal propagation of information under vehicle-to-vehicle communications. I EEE Transactions on Intelligent Transportation Systems, 19 (1), 3-12. Lighthill, M. J., Whitham, J . B., 1955. On kinematic waves. I : F low movem ent in long river; II : A theo ry of traffic flow on long crowded roads. Proceedings of Royal Society A, 229 (1178), 281-345. Li, M. Y., Graef, J. R., Wang, L ., Karsai, J., 1999. Global dynamics of a SEIR model with varying total population size. Mathematical Biosciences, 160 (2), 191-213. Li, M. Y., Muldowney, J. S., 1995. Global stability for the SEIR model in epidemiolog y. Mathematical biosciences, 125 (2), 155-164. Noori, H., Olyaei, B. B., 2013. A novel study on beaconing for VANET -based vehicle to vehicle communication: Probability of beacon delive ry in realistic large-s cale urban are a using 802.11p. 2013 International Conference on Smart Communications in Network Technologies, June, pp. 1-6, Paris, France. Richards, P. I., 1956. Shock waves on the highway. Operations Research, 4, 42-51. Smith, H. L ., Wang, L., Li, M. Y., 2001. Global dynamics of an SEIR ep idemic model with verti cal transmission. SIAM Journal on Applied Mathematics, 62 (1), 58-69. 33 Talebpour, A., Mahmassani, H. S., Bustamante, F. E., 2016. Modeling drive r be havior in a c onnected environment: Integrated microscopic simulation of tra ffic and mobile wireless telecommunication systems. Transportation Research Record: Journal of the Transportation Research Board, 2560, 75- 86. Wang, J., Kim, Y. H., He, X., Peeta, S., 2018. Analytical model for informa tion flow propagation wave under an information relay control strateg y in a con gested vehicle -to-vehicle communication environment. Transportation Researc h Part C: Emerging Technologies, 94, 1-18. Wang, X., 2007. Modeling the pro cess o f information rela y throu gh in t er-vehicle communication. Transportation Research Part B: Methodolog ical, 41 (6), 684-700. Wang, X., Adams, T. M., Jin, W. L ., Me ng, Q., 20 10. The process of information propag ation in a traffic stream with a genera l vehicle headway: A revisit. Transportation Research Part C: Emerging Technologies, 18 (3), 367-375. Wang, X., Yin, K., Zhang, Y., 2012. A Markov process for information propagation via inter -vehicle communication along two parallel roads. IEEE Transactions on Wireless Communication 11 (3), 865-868. Wang, X., Yin, K., Qin, X., 2011. An approx imate Bernoulli proce ss in information propagation through inter-vehicle communica tion along two parallel roads. Tr ansportation Resea rch Part C: Emergin g Technologies, 19 (3), 469-484. Wang, X., Yin, K., Yan, X., 2015. Vehicle-to-vehicle connectivit y on parallel roadway s with large road separation. Transportation Research Part C: Emerging Technologies, 52, 93-101. Zhang, J., Han, G., Qian, Y., 2016. Qu euing theory based co-channel interference anal ysis approach for high-density wireless local area networks. Sensors, 16 (9), 1348.
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment