Optimal Voltage Regulation of Unbalanced Distribution Networks with Coordination of OLTC and PV Generation
Photovoltaic (PV) smart inverters can regulate voltage in distribution systems by modulating reactive power of PV systems. In this paper, an optimization framework for optimal coordination of reactive power injection of smart inverters and tap operat…
Authors: Changfu Li, Vahid Disfani, Hamed Valizadeh Haghi
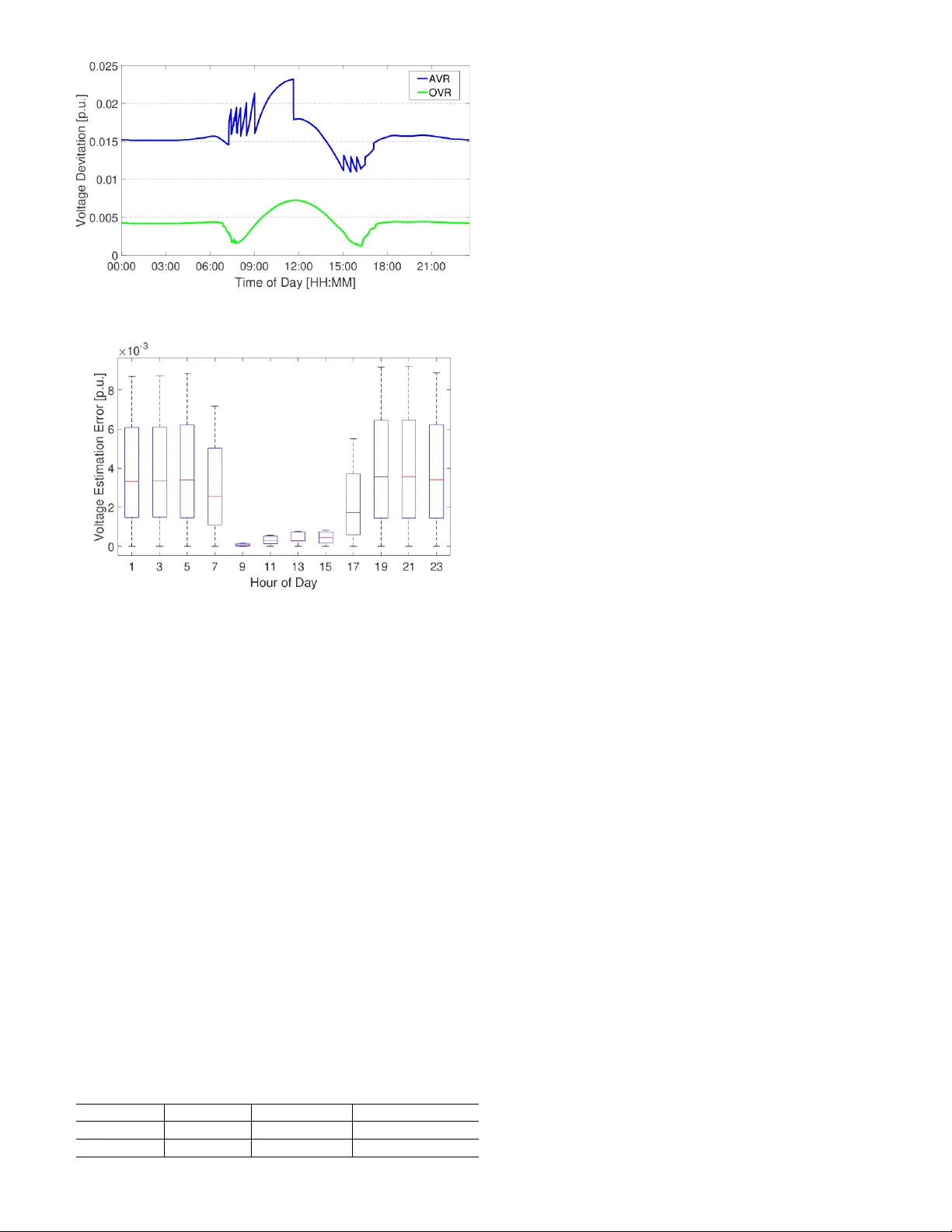
Optimal V oltage Re gulation of Unbalanced Distrib ution Netw orks with Coordination of OL TC and PV Generation Changfu Li ∗ , V ahid R. Disfani † , Hamed V alizadeh Haghi ∗ and Jan Kleissl ∗ ∗ Center for Energy Research, Uni versity of California San Die go, La Jolla, CA 92093 USA † Department of Electrical Engineering, Univ ersity of T ennessee at Chattanooga, TN 37403 USA Emails: chl447@ucsd.edu, vahid-disf ani@utc.edu, valizadeh@ieee.or g, jkleissl@ucsd.edu Abstract —Photovoltaic (PV) smart in verters can regulate volt- age in distrib ution systems by modulating reactive power of PV systems. In this paper , an optimization framework for optimal coordination of reacti ve power injection of smart in verters and tap operations of voltage regulators for multi-phase unbalanced distribution systems is proposed. Optimization objectives are minimization of voltage deviations and tap operations. A novel linearization method conv exifies the problem and speeds up the solution. The proposed method is validated against conv entional rule-based autonomous voltage regulation (A VR) on the highly- unbalanced IEEE 37 bus test system. Simulation results show that the proposed method estimates feeder voltage accurately , voltage deviation reductions are significant, over -voltage problems are mitigated, and voltage imbalance is reduced. I . I N T RO D U C T I O N High shares of photovoltaic (PV) generation present signif- icant challenges to voltage regulation in distribution systems due to power output variability [1]. Con ventional volt-v ar devices like shunt capacitors are limited in number and slow in response time and therefore unable to regulate feeder voltage during periods of variable PV generation. PV smart inv erters (SIs) provide an alternative method for regulating voltage [1]. SI can operate autonomously based on pre-defined V olt/W att and V olt/V Ar curves to regulate voltage [1]. These autonomous controls are based on local measure- ments requiring no communications. Howe ver , the lack of coordination between SIs and con ventional voltage regulation devices can lead to sub-optimal system performance. Optimization of SIs considering feeder-wide constraints can achiev e optimal power flo w [2 – 4]. In [2], semi-definite programming relaxation is leveraged for optimal dispatch of PV active and reactive power . A linear approximation of power flow equations is used in [3] for efficiently solving an optimization of PV real and reactiv e power . An Alter- nating Direction Method of Multipliers based algorithm is proposed in [4] for optimal PV reactive power dispatch and voltage regulation. In these works, cooperation amongst SIs is studied without considering coordination between SIs and other voltage regulation devices like voltage regulators (VRs). Uncoordinated operation of VRs and SIs can cause unintended VR switch operations [5]. PV real and reactiv e power and VR tap position are optimized simultaneously to minimize voltage deviations in [6]. The optimization in [7] also coordinates PVs, VRs, and shunt capacitors while meeting voltage operation limit constraints. Non-linear A C power flo w constraints render the optimiza- tion problem non-con ve x and computationally intensiv e for large distribution networks. Different linearization techniques hav e been applied in the literature to address these concerns. Reference [6] deriv es sensitivity coefficients of node v oltages to approximate voltage change as a function of SI real power , reactiv e power , and VR tap positions. Ho wev er , the sensitivity of coef ficients for VR tap position is calculated assuming that they are located at the substation and the method may not be applicable to distribution feeder with VR in the middle of the feeder . Linearized power flow equations are exploited for improving solution speed in [3]. The solution, ho wev er , does not coordinate SIs and VRs and is not validated on multi- phase and unbalanced distribution feeders. Further , the v oltage estimate from the linear approximation differs substantially from the actual system voltage. SIs, VRs and shunt capacitors are coordinated in [7] and the method is tested on unbalanced feeders. Since the non-linear terms in power flow constraints are not relaxed, the solution speed is relativ ely slo w . Despite dedicated computational strategies, the average solution speed is 5 s for the small IEEE 34 bus feeder using a high perfor- mance PC. In our previous work [8], we proposed a linearization technique to conv exify the an optimization problem with multiple, coordinated VRs. V oltage violations are mitigated and the method is prov en to be computationally efficient. In this paper , we extend [8] by proposing a new linearization method to represent feeder v oltage considering coordination between SI reacti ve po wer and VR, which is not taken into account in [2 – 4, 8]. By relaxing the non-linear AC power flow constraints, a substantial solution speed-up ov er [7] is achiev ed. Also, VRs do not hav e to be located at substation as opposed to [6]. A sensitivity study shows that the proposed method provides more accurate voltage estimation compared to [3]. As each node is modeled independently , the method is compatible with unbalanced feeders as demonstrated on the highly unbalanced IEEE 37 bus test network. I I . L I N E A R I Z E D M O D E L O F V O LT AG E M AG N I T U D E A. Linearization of F eeder Nodal Equation Consider the feeder nodal voltage equation: V = Z I , (1) where V is the vector of voltages for all nodes, I is the vector of net node current injections and Z is the feeder impedance matrix. A linear approximation of the perturbations in node v oltage resulting from changes in impedance and current ( ∂ V /∂ ( Z I ) ) leads to ∆ V = ∆ Z · I 0 + Z 0 · ∆ I , (2) where the subscript (0) represents unperturbed parameters. ∆ Z is a function of tap position changes of VRs and ∆ I is a function of the current injection changes by PVs and loads. Modeling ∆ V requires modeling the effects of VR tap changes on ∆ Z and current source changes on ∆ I . B. Modeling VR T ap Operation Effects on V oltage VR tap operation effects on voltage can be determined by modeling its ef fects on Z , which is a function of tap ratio a . The tap ratio is the ratio of transformer secondary voltage with respect to the primary voltage, which is related to tap position τ by the linear equation, a = 1 + τ τ max ( a max − 1) , (3) where a max is the maximum tap ratio corresponding to maxi- mum tap position τ max . Y 0 and Z 0 are the admittance and impedance matrices asso- ciated with the initial tap ratio a 0 . ∆ Y is the admittance change due to change of VR tap ratio from a 0 to a . The corresponding change of the impedance matrix can be expressed as, ∆ Z = − Y − 1 0 · ∆ Y · Y − 1 0 , (4) which will be used in Eq. (2) to determine ∆ V . ∆ Z can be modeled if ∆ Y is known. Considering a VR connected between node i of the primary side and node j of the secondary side, only the elements corresponding to these two nodes in ∆ Y are non-zero: ∆ Y ii = ( a 2 − a 2 0 ) /z T , (5) ∆ Y j i = ∆ Y ij = − ( a − a 0 ) /z T , (6) where z T is the equi valent impedance of the transformer on the winding connected to node i . Performing T aylor series expansion for a 2 around a 0 , the non-linearity in Eq. (5) can be remov ed, yielding a linear expression, ∆ Y ii = (2 aa 0 − 2 a 2 0 ) /z T . (7) More details on the deriv ation of Eq. (4) and the rela- tionship between Y and a can be found in [8]. Although the fixed current assumption is used in [8] to deriv e Eq. (4), the expression is still applicable for this paper without the assumption since both ∆ Z and ∆ Y in Eq. (4) are direct results of VR tap changes and are only functions of tap positions. C. Modeling V oltage Impacts of Current Sour ces PVs and loads are current sources. Any change in their injected currents ( ∆ I ) affects the feeder voltage profile as modeled in Eq. (2). The power injections of PVs and loads needs to be specified for modeling their current injections. The power flow equation is, S = P + j Q = V I ∗ , (8) where S is the vector of apparent po wer injection of all nodes on a feeder , P is the v ector of the real power and Q is the vector of reactiv e power injection. V is the voltage vector and I ∗ is the conjugate of the net current vector . Expressing the parameters as the initial value plus a perturbation, V can be represented as V = V 0 + ∆ V . Similarly , I can be written as I = I 0 + ∆ I . Therefore, Eq. (8) can be rewritten as, S = ( V 0 + ∆ V )( I 0 + ∆ I ) ∗ . (9) Eq. (9) sets up the relation between ∆ I and the power injections of PVs and loads. D. Linearization of Real and Reactive P ower Injection Con- straints The power injections of PV and load nodes need to be con- strained for representing load consumption and PV production. Substituting the real and imagery parts of V 0 , ∆ V , I 0 and ∆ I into Eq. (9) yields the real and reactiv e power injection as, P = ( V d 0 + ∆ V d )( I d 0 + ∆ I d ) + ( V q 0 + ∆ V q )( I q 0 + ∆ I q ) , (10) Q = ( V q 0 + ∆ V q )( I d 0 + ∆ I d ) − ( V d 0 + ∆ V d )( I q 0 + ∆ I q ) . (11) where V 0 = V d 0 + j V q 0 , I 0 = I d 0 + j I q 0 , ∆ V = ∆ V d + j ∆ V q and ∆ I = ∆ I d + j ∆ I q . The unperturbed variables (subscript (0) ) are known. The terms with ∆ symbol are the unknowns to be solv ed in the optimization. Imposing constraints of P and Q directly would result in products of two unknown optimization parameters (e.g. ∆ V d ∆ I q in P ) making the problem non-conv ex. T o address this issues, P and Q are linearized and the constraints are implemented using ∆ P and ∆ Q . After linearization, higher order non-con ve x square terms are dropped to yield ∆ P = V d 0 ∆ I d + ∆ V d I d 0 + V q 0 ∆ I q + ∆ V q I q 0 , (12) ∆ Q = V q 0 ∆ I d + ∆ V q I d 0 − V d 0 ∆ I q − ∆ V d I q 0 . (13) The higher order non-conv ex terms constitute the real and reactiv e power errors P err = ∆ V d ∆ I d + ∆ V q ∆ I q and Q err = ∆ V q ∆ I d − ∆ V d ∆ I d . Assuming a constant po wer load model, the perturbed power injection should remain the same as P 0 and Q 0 . Therefore the power injections constraints for load nodes are ∆ P = 0 , (14) ∆ Q = 0 . (15) Assuming no real power curtailment for PVs, the real power injections of the perturbed PV nodes remains P 0 . The reactiv e power injections of PV nodes are limited by the in verter rated power , | Q | ≤ Q max . Q max = √ S 2 − P 2 is the maximum av ailable reacti ve po wer of the SI, where S is the in verter rated power . After the linearization, the constraints at the PV nodes become ∆ P = 0 , (16) | ∆ Q | ≤ ( Q max − Q 0 ) . (17) W e assume the PV operates with unit power factor before perturbations, or Q 0 = 0 . Therefore the constraint in Eq. (17) becomes − Q max ≤ ∆ Q ≤ Q max . (18) E. Linearization of voltage magnitudes Node voltages need to be estimated in the optimization to improve the feeder voltage profile. After linearization, the voltage magnitude of an arbitrary node can be calculated using | v | = | v 0 | + ∆ | v | = | v 0 | + | v 0 | − 1 ( v d 0 ∆ v d + v q 0 ∆ v q ) . (19) More details regarding the linearization of voltage magnitude can be found in [8]. This definition for voltage magnitudes of all nodes sets up an affine relation between the voltage magnitude and optimization parameters, which conv exifies the optimization problem. I I I . F E E D E R - W I D E V R A N D P V O P T I M I Z A T I O N A. Optimization Model 1) Objective Functions: The first objecti ve function ( J 1 ) is the sum of voltage de viations from 1 p.u. on the feeder during the optimization horizon, J 1 = N X i =1 X t ∈ T ( || v i ( t ) | − 1 | ) , (20) where N is the total number of nodes on the feeder , T is the set of time steps in the optimization horizon and | v i ( t ) | denotes the voltage magnitude of node i at time step t . Minimizing J 1 achiev es a more homogeneous and steady voltage. The second objective function ( J 2 ) counts the number of TO as, J 2 = X p ∈ P X t ∈ T | τ p,t +1 − τ p,t | , (21) where P is the set of all VRs and τ p,t denotes the tap position of VR p at time step t . All tap changes over a defined time horizon T are aggregated in J 2 . Combining the two objectiv e functions, the final objective of the optimization is min J = w 1 J 1 + w 2 J 2 , (22) The weighting factors, w 1 and w 2 balance voltage regulation performance and total TO. Hea vy weighting on J 1 will im- prov e the voltage profile at the cost of more TO and vice versa. w 1 = 1 and w 2 = 0 . 05 will be used in this paper . 2) Constraints: P ower Flow Constraints: T o ensure that the final solution meets the feeder power flow , the linearized po wer flow (Eq. (2)) is an equality constraint. Further , the equality constraint in Eq. (19) relates the voltage magnitudes to the real and imaginary parts of the node voltages. VR Constraints are: τ p,t ∈ Z , (23) τ p, min ≤ τ p,t ≤ τ p, max , (24) | τ p,t − τ p,t − 1 | ≤ ∆ T O p, max , (25) where τ p,t denotes the tap position of VR p at time step t , Z represents integer numbers. τ p, min and τ p, max are the minimum and maximum tap positions, respectiv ely . ∆ T O p, max av oids unrealistic tap operation consider TO delays by limiting the maximum TOs allowed between two consecutiv e time steps. ∆ T O p, max is set to 1 TO per 30 sec. Fig. 1: Flowchart of the proposed voltage optimization. PV and load forecasts are used to obtain the linearization v oltages and currents ( V 0 , I 0 ) for the next 5 mins from base power flow simulations. Then the voltage optimization per Eq. (22) is formulated and solved, providing decision values for ∆ V , ∆ I and τ . The optimal reactive power of the SI is then calculated using Eq. (11). The optimal tap positions τ and SI reactiv e power are then input into OpenDSS [9] for another power flo w . The voltage results from the OpenDSS simulation are then compared to those from the estimation with the proposed method (Eq. (19)). Eq. (3) relates VR tap ratio a to VR tap position τ and is included as an equality constraint. Eq. (4) is also included as an equality constraint for representing the relationship between ∆ Z and ∆ Y . Eq. (6)-(7) are also included as equality constraints for relating a with admittance change. Node P ower Injection Constraints: As explained in Sec- tion II-D, node po wer injections need to be constrained for representing PV and load behaviors. For load nodes, Eq. (14)- (15) are included as equality constraints. For PV nodes, Eq. (16) is included as an equality constraint and Eq. (18) is included as an inequality constraint. Sour ce Bus Constraints: F or substation nodes, ∆ V = 0 is imposed as an equality constraint under the assumption of infinity source bus. B. Implementation and F or ecasts Fig. 1 presents the flowchart of the implementation of the proposed voltage optimization. For TOs minimization, the optimization problem is defined over a 5 mins time horizon. V 0 and I 0 ov er the next 5 mins are needed for modeling the effects of VR tap position changes and SI reactiv e power on voltage. In this paper, it is provided from a base po wer flow run by OpenDSS [9] using solar and demand forecasts. Sky imagers provide forecasts of PV availability through- out the feeder at high spatio-temporal resolution for the next 5 mins at 30 s resolution [10]. A perfect load forecast is assumed using the measured data at the substation provided from the utility . I V . C A S E S T U DY A. Distribution F eeder Models T o ev aluate the proposed method, quasi-steady state simu- lations are carried out on the multi-phase unbalanced IEEE 37 bus feeder . The simulation is performed for 24 hours with 30 sec time step. 30 loads on the feeder result in a P load peak = 2 . 73 MV A peak demand. 30 PVs with DC T ABLE I: Summary of autonomous voltage regulation (A VR) and optimal voltage regulation (O VR). VR PV A VR (benchmark) Autonomous control Unity PF O VR (proposed) T ap optimized V AR optimized power rating ranging from 23.0 to 206.0 kW and totalling P pv peak = 4095 kW are randomly deployed on the feeder . 10% ov ersizing of A C power rating is assumed for the PV interter . The total PV penetration on the feeder is 150% by capacity: P V Pen = P pv p eak P load peak × 100% . One VR is installed at the substation. The VR tap position can vary from -16 to +16 with voltage regulation capability of [0.9 1.1] p.u.. B. V oltag e Re gulation Methods 1) Autonomous V oltage Re gulation (A VR): The proposed method is benchmarked against the widely-used con v entional autonomous v oltage regulation scheme (A VR). The two dif fer- ent v oltage regulation strategies are summarized in T able. I. In A VR v oltage control devices like VRs operate autonomously based on pre-defined rules without coordination with each other . Only VRs participate in A VR, while PVs do not par - ticipate, i.e. there is no reacti ve power injection. VRs change tap to keep the deviation of the local busbar voltage from the preset reference voltage within certain limits. The VR reference voltage for the test feeder is set to 1.03 p.u. and the voltage regulation bandwidth is 0.0167 p.u.. For better voltage regulation, the tap time delay is set to be 0 sec. All other VR parameters use the default OpenDSS [9] values. 2) Optimal V oltage Regulation (O VR): For O VR, VRs and PVs are coordinated through optimization for v oltage deviation reduction as described in Section III. PV participates in voltage regulation via reacti ve power absorption and injection. VR tap positions are the outputs of the optimization problem proposed in Section III. A reference voltage is not needed as the VRs will follow the optimal tap position. V . D I S T R I B U T I O N F E E D E R S I M U L AT I O N S R E S U LT S A. V oltag e Pr ofile Fig. 2 presents snapshot v oltage profiles of the feeder around noon (11:53, medium loading (0.83 MV A), large PV generation) and in the ev ening (21:00, heavy loading (1.91 MV A), no PV generation). At noon, a voltage increase along the feeder results from re verse po wer flo w ca used by e xcess PV production. For A VR, the voltage increases to 1.055 p.u. at the feeder end, in violation of ANSI standards. The ov er-v oltage violation only occurs on phase 1 and there are large voltage discrepancies across dif ferent phases at the feeder end. This indicates significant imbalances on the feeder . On the contrary , O VR manages to k eep the voltage of all phases within the [0.95 1.05] p.u. ANSI limits. The voltage imbalance at the feeder end is also reduced since O VR is set up to minimize total voltage deviation, bringing all the voltage closer to 1 p.u.. At 21:00 heavy loading causes a large voltage drop with A VR. Again, v oltage discrepancies between phases are large: The largest voltage difference occurs between phases 1 and 3 at the feeder end at 0.057 p.u. (equi v alent to 57% of the allow able voltage range). W ith O VR, the voltages remain close to 1 p.u. across the entire feeder, resulting in a more desirable homogeneous (flat) voltage profile. The voltage imbalance is 0 0.5 1 1.5 2 2.5 Distance from Sub [km] 0.95 1 1.05 1.1 Voltage [p.u.] AVR Phase 1 Phase 2 Phase 3 0 0.5 1 1.5 2 2.5 Distance from Sub [km] 0.95 1 1.05 1.1 OVR (a) Phase 1 Phase 2 Phase 3 0 0.5 1 1.5 2 2.5 Distance from Sub [km] 0.95 1 1.05 1.1 Voltage [p.u.] AVR Phase 1 Phase 2 Phase 3 0 0.5 1 1.5 2 2.5 Distance from Sub [km] 0.95 1 1.05 1.1 OVR (b) Phase 1 Phase 2 Phase 3 Fig. 2: Feeder voltage profile at 11:53 (top) and 21:00 (bottom) for the A VR (left) and O VR (right) voltage regulation methods. substantially reduced with a maximum of 0.014 p.u., which is a 75% reduction compared to the A VR benchmark. O VR squeezes the voltage range on all phases toward 1 p.u. with coordinated reactive power support from PV , reducing the voltage imbalance on the feeder . The strong O VR results are enabled by unlimited reactive po wer support during night time. Fig. 3 compares the average voltage deviation of all nodes on the feeder between A VR and O VR. For A VR, the mean voltage deviation is around 0.015 p.u. during periods without PV production. The voltage deviation increases when PV power production ramps up starting around 08:00 and reaches 0.023 p.u. at noon. With O VR the voltage de viation decreases to below 0.005 p.u. at night and it is always below 0.008 p.u. during the day . The minimum voltage deviations around 08:00 and 16:00 results from PV generation balancing load consumption; therefore minimum power need to be supplied by the substation. B. V oltag e Estimation Accuracy Giv en that estimated node voltages are used in the for- mulated optimization (Eq. (22)) to determine optimal VR tap position and PV reactiv e po wer , we examine the errors result- ing from the linearization of feeder nodal voltage equations (Eq. (2)), admittance matrix (Section II-B), power injection constraints (Section II-D) and voltage magnitude (Eq. (19)). Errors are defined as the differences in estimation of voltage magnitude from Eq. (19) versus the non-linear A C po wer flow results from OpenDSS: E ( t ) i = V estimate ( t ) i − V OpenDSS ( t ) i . (26) Fig. 4 presents E ( t ) distributions. Since the estimation match the AC power flow results closely , it can be concluded that the proposed voltage model estimates voltage magnitudes accurately . The maximum error magnitude is 0.009 p.u. and the mean absolute error magnitude is always under 0.004 p.u.. Fig. 3: Time series of mean magnitude of node voltage de viation from 1 p.u.. Fig. 4: Distribution of voltage estimation errors. For readability , the results are aggregated every two hours into 12 groups. For example, the box plot of hour 1 is based on the results from 00:00 to 02:00. C. Computation T ime T able II compares the av erage computation time in [7] for the IEEE 34 bus feeder and the IEEE 37 bus feeder using O VR in this paper . Since the non-linear constraints are relaxed in the proposed O VR, the computation time is reduced by 79%. Solution time is shorter even though [7] uses a (slightly) smaller feeder and a more powerful computer (Intel Core i7-6700 3.4-GHz processor and 32 GB RAM in [7] versus Intel(R) Core(TM) i7-4700MQ 2.8-GHz processor and 16 GB RAM in this paper). V I . C O N C L U S I O N S A N D F U T U R E W O R K A novel method of coordinating VRs and PV reactiv e power for voltage regulation was proposed. O VR is capa- ble of coordination voltage regulation between multiple VRs and PVs. O VR is compared against the con ventional A VR through simulations on the highly unbalanced IEEE 37 bus test feeder . Results sho wed the proposed O VR can mitigate over - voltage violations, significantly reduce voltage deviations, and decrease voltage imbalance across phases. This is achiev ed by T ABLE II: Comparison of average computation time (s) per time step in [7] and O VR case study in this paper . T est feeder # of nodes Optimization Solution time (s) IEEE 34 95 [8] 4.55 IEEE 37 120 O VR 0.95 effecti ve coordination between VRs and PV reactiv e power control. Future work will test the scalability of the proposed method on large real utility distribution feeders. Since O VR relies on solar and po wer demand forecast to optimize VR tap positions and PV reactive power , future work will also examine the robustness of O VR against forecast errors. R E F E R E N C E S [1] Z. K. Pecenak, J. Kleissl, and V . R. Disfani, “Smart in verter impacts on california distribution feeders with increasing pv penetration: A case study , ” in PESGM, 2017 . IEEE, 2017, pp. 1–5. [2] E. Dall'Anese, S. V . Dhople, and G. B. Giannakis, “Optimal dispatch of photovoltaic in verters in residential distribution systems, ” IEEE T ransactions on Sustainable Ener gy , vol. 5, no. 2, pp. 487–497, apr 2014. [Online]. A vailable: https://doi.org/10.1109/tste.2013.2292828 [3] S. S. Guggilam, E. Dall’Anese, Y . C. Chen, S. V . Dhople, and G. B. Giannakis, “Scalable optimization methods for distribution networks with high pv integration. ” IEEE T rans. Smart Grid , vol. 7, no. 4, pp. 2061–2070, 2016. [4] B. A. Robbins and A. D. Dominguez-Garcia, “Optimal reactiv e power dispatch for voltage regulation in unbalanced distrib ution systems, ” IEEE T ransactions on P ower Systems , vol. 31, no. 4, pp. 2903–2913, jul 2016. [Online]. A v ailable: https://doi.org/10.1109/tpwrs.2015. 2451519 [5] M. Kraiczy , T . Stetz, and M. Braun, “Parallel operation of transformers with on-load tap changer and photov oltaic systems with reactive power control, ” IEEE T ransactions on Smart Grid , 2017. [6] K. Christakou, J.-Y . LeBoudec, M. Paolone, and D.-C. T omozei, “Ef ficient computation of sensitivity coefficients of node voltages and line currents in unbalanced radial electrical distribution networks, ” IEEE T ransactions on Smart Grid , vol. 4, no. 2, pp. 741–750, jun 2013. [Online]. A vailable: https: //doi.org/10.1109/tsg.2012.2221751 [7] Q. H. Nguyen, H. V . Padullaparti, K. W . Lao, S. San- toso, X. Ke, and N. A. Samaan, “Exact optimal power dispatch in unbalanced distribution systems with high pv penetration, ” IEEE T ransactions on P ower Systems , 2018. [8] C. Li, V . R. Disfani, Z. K. Pecenak, S. Mohajeryami, and J. Kleissl, “Optimal OL TC voltage control scheme to enable high solar penetrations, ” Electric P ower Systems Resear ch , vol. 160, pp. 318–326, jul 2018. [Online]. A vailable: https://doi.org/10.1016/j.epsr .2018.02.016 [9] R. C. Dugan, “Reference guide: The open distribution system simulator (opendss), ” Electric P ower Resear ch Institute, Inc , 2012. [10] H. Y ang, B. Kurtz, D. Nguyen, B. Urquhart, C. W . Cho w , M. Ghonima, and J. Kleissl, “Solar irradiance forecasting using a ground-based sky imager dev eloped at uc san diego, ” Solar Energy , vol. 103, pp. 502–524, 2014.
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment