Intelligent Sensor Based Bayesian Neural Network for Combined Parameters and States Estimation of a Brushed DC Motor
The objective of this paper is to develop an Artificial Neural Network (ANN) model to estimate simultaneously, parameters and state of a brushed DC machine. The proposed ANN estimator is novel in the sense that his estimates simultaneously temperatur…
Authors: Hacene Mellah, Kamel Eddine Hemsas, Rachid Taleb
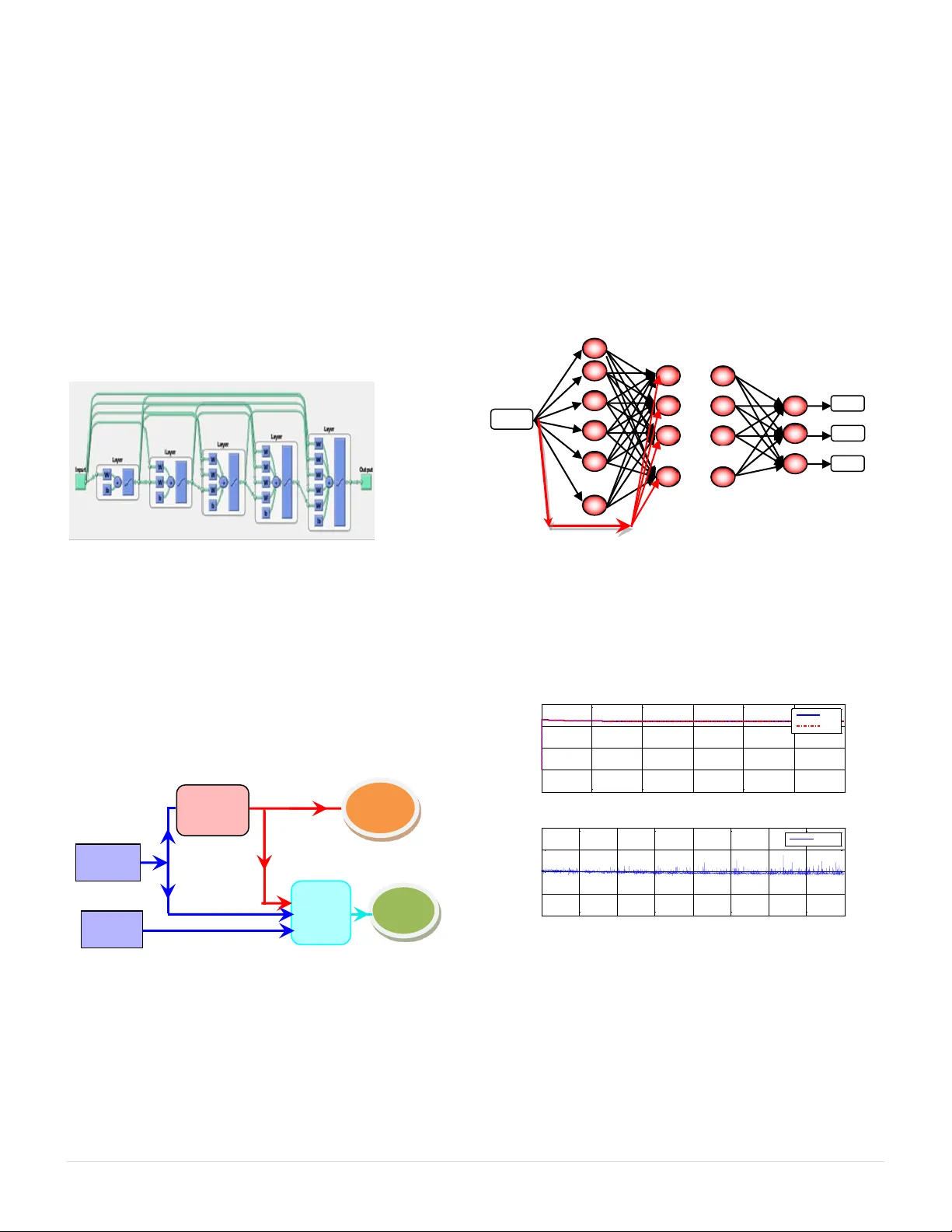
(IJACSA) International Journal of Advanced Computer Science and Applications, Vol. 7, No. 7, 2016 230 | P a g e www.ijacsa.thesai.org Intelligent Sensor based Bayesian Neural Network for Combined Parameters and States Estimation of a Brushed DC Motor Hacene MELLAH Electrical Engineering Depar tment, Ferhat Abbas Sétif 1 University, LAS laborator y, Sétif , Algeria Kamel Eddine HEMSA S Electrical Engineering Depar tment, Ferhat Abbas Sétif 1 University, LAS laborator y, Sétif , Algeria Rachid TALEB Electrical Engineering Depart ment, Benbouali Hassiba Uni versity of Chlef, Chlef, Algeria Abstract — The objective of th is paper is to dev elop an Artificial Neural Network (ANN) model to estimate simultaneously, parameters and state of a brushed DC machine. The proposed ANN esti mator is novel in the sense that his estimates simultaneously te mperature, speed and rotor resistance based only on the measurement of the voltage and current inputs. Many types of ANN estima tors have been designed by a lot of researchers during the last two decades. Each type is designed for a specific application. The th ermal behavi or of the m otor is very slow, which leads to la rge amounts of data sets. The standard ANN use often Multi-Layer Perceptron (MLP) with Levenberg-Marquardt Backpropagation (LM BP), a mon g t he limits of LM BP in th e case of l arge nu mber of data, so the use of ML P based on LMBP is no long er valid in our case. As solution, we propose the use of Cascade- Forward Neural Netw ork (CFNN) based B ayesian Regulation backpropagation (B RBP). To test our estimator robustness a r andom white -Gaussian noise h as been added t o the sets. The p roposed estimator is in our view point accurate and robust. Keywords — DC motor; ther mal modeling ; state and pa rameter estimations; Bayesian regulation; b ackpropagation; cascade- forward neural network I. I NTRODUCTI ON We said that when we ca n measure a phy sical quantity, we know somethin g about it, but when we cannot quantif y it, our knowledge about it is very poor and insuff icient, so without quantify ing scienc e does not adv ance. The DC motor speed co ntrol lers frequently use feedback from a speed measuring device, such as a tachometer or an optical encoder [1,2], but this later, adds an additional cost and congestion th roughout th e installati on [2,3], th e problem s related t o the s peed m easurem ent are detaile d in the [3]. The simplest estim ation method is base d on the stea dy-state voltage equation, w here th e spe ed is w ritten as a function of armature voltage and current; the peaks due to c onvert er especially in the transient stat e affect this speed and the link re sistan ce-tem perature is ignore d on the other hand, it is the two majo r inconven ient of this method [ 1]. R. W elch J r. et all [4] discuss the tem perature effects on electric al and mechanic al time constants, he prove that these time constants are not constan t value, in addition the motor’s electric al resist ance and its back EMF are depend on temperatur e. In [5-8] w e find sev eral methods about DC m achine temperatur e measurem ent, but the problem s of temperat ure measurem ent are more complicated and difficult to s olve than the speed measurem ent problem s, since, the rotor is in rotation. The temperature variat ion is str ongly nonlinear depend o n the load, the supply quality , the cooling conditions , the design and the envi ronment c onditi ons. Actu ally, th e pro blems of armature temperatur e measu rem ent are not totally resolv ed. In l itera ture [9 -10], a fin ite element m ethod ( FEM) w as usually used to obtain genera lly a 3D thermal distri bution in all electric al machine point. T he major advant age of this metho d is that is suitable t o help a designer to optim ize the cost, w eight and cooling mode in the goal to increase the efficiency and motor’s lifetime [10], generally , the FEM is h ard to implement in real time both fo r the control or monitoring , on the other hand, this appr oach has an eno rmous res olution tim e. According the literature [11-15], we can distinguish two types of electri cal m achines thermal m odeling approach es: The f irst one is thermal model-based approaches, this approach based to divide the machin e into hom ogeneous components unscrewed in order to ensure each part has uniform thermal characteris tics such as thermal capacitors , thermal resistances and heat trans fer coeff icients [11, 15]. The identifica tion of the mod el is p erform ed ei ther by the finite element techni que or by a high range of temperature measurem ent. T hese models are generally very detailed so, too complex for real time applicati on [16], however, many researche rs simplify this model for the real time applications [15, 17]. This approach is robust, unfortunately this model is not generalized and a few measuremen ts are needed for each motor [1 1, 16] . The second one is the param eter-based approach es, thi s approach based to get the tempe rature f rom the onl ine resistanc e estimation [12-14] or identifie d [18 -19]. Theref ore, the estimate tem peratu re t akes under c onsidera tion the th ermal environm ental conditions . T hi s method can respond to changes in the cooling conditi ons, and is accurate, but it is gener ally to o sensitive [20]. This wo rk was supported in part b y Electrical Enginee ring Department, Ferhat Abbas Setif1 University (UFAS1) and in other p art b y Algerian ministry of r esearch and Hig h educatio n. (IJACSA) International Journal of Advanced Computer Science and Applications, Vol. 7, No. 7, 2016 231 | P a g e www.ijacsa.thesai.org P.P. Acarnl ey et all [1] proposes an Extend ed Kalm an Filter (EKF) is im plemented to estimate both the speed an d armature temperature, but the EKF has problems with the matrices initializ ation step for each machine, therefor e, the risk of divergence is not very far and not forgotten its depende nce of the m athem atical m odel. R. Pantonial et all [21] propose the using of E KF in two steps, the first one is in the steady-state used to estimate the electrom echanical behavior, and the second one is a transien t version used to estimate the therm al behavior. However, in this case, the system is d ecouple d and the temperature effect on the resistanc e is n ot into account f or the stea dy-state m odel. A new nonlinear estimation strategy is proposed in the recent paper in this field based o n co mbining elements of the EKF with the smooth variable structure filter (SVSF) to estimate the st ator w inding resistance [22], in this resea rch we find o nly a resistance estim ation approach, also the link temperatur e-resistan ce is ignored, then this is the simplest estimato r versi on. M. Jabri et all use a fuzzy logic technic to estim ate the fiel d and armature resistan ce of DC series motor, this is an important p roblem in order to implement a robust closed loop control [ 23], in their ne west version [24], present a comparativ e study between a Levenberg-Marquar dt (LM) and LM w ith tuning Gene tic Alg orithm s ( GA) to adjus t relaxation . However, in the two versions , only the resistan ce and the fl ux were estim ated an d the lin k te mperatu re-resistan ce is ig nored. The most important electric al machine parameter is the winding temperatu re, the w inding tem perature affec ts both the machin e's lifetime and accu racy of control, wh en the windi ng temperatur e is equal or superi or to the support ed winding insulati on temperatu re, this critic al tempera ture affect directly on the machin e lifetim e; thus, good know ledge of the therm al state of th e m achine is very importan t. In this context , obt aining the temperatur e by brittle , expensive sensors and ad ds a cong esti on to the overall installati on, without forgett ing the problematic of the sen sor placemen t, therefore, the sensor is not the right solution [16]. In addition, using a Kalman filter, which is difficu lt to stabili ze and the problematic of covariance matrices choices, remains the tw o major inc onvenienc es, we p ropose an intelligen t universal estim ator bas ed on A NN. The ANN widely used in dif ferent eng ineering dom ain, such as renew able energy [25], chem ical [26], pharmaceuti cal [27 ] and m echanics[ 28], as w ell the A NN used in seve ral engineerin g applicat ions such as co ntrol [29], optimization [30], modeling [31] and condition monitor ing [32]. In addition , the ANN ca n used alone [33] or mixed with o ther technic such as GA [34] , Particle Swarm Optimization (P SO) [35] and Fuzzy L ogic [36]. One of th e m ost comm only phrase d questions in neu ral computati on techniques refers to the size of the netw ork that provides the best results. Alt hough various ‘‘hin ts and tips’ ’ like suggestions have b een pointed o ut so far, there is still no clear answer to reply to this questi on [37,38 ]. T his paper describes and applies an int ellig ent techn ique f or com bined speed, tem perature an d resista nce estim ation in a DC m achine system . The use of the proposed m ethod for sim ultaneous estimation combines many ad vantages. We don't need to use the speed and temperature sens ors, the arm ature temperatur e estimation may be used for thermal con dition m onitoring, an d the estim ate of speed c an be u sed on s peed drive process . The resistanc e estimation may be used in adaptive calcul ations in the goal to escape the maladjustm ent phenomenon of the control by parameter varia tions such as the PID gain correcti on. T he proposed estimator is suitable both in the drive and in th e therm al m onitoring. In secti on 2, a thermal m odel of DC motor is presente d. In section 3, the DC mot or model has been resolved and some simu lation results have been presented . In section 4, the ANN topology and design steps hav e been introduced. In section 5, the simulation stu dies of ANN estimator is carrie d out to verify and validate the convergenc e, effectiveness and estim ation quality . II. T HERMAL M ODEL O F DC M O TOR The model used in this paper i s illust rated in [1] . A. Electrica l equa tion 0 ( 1 ) a a a a a e di V R i l k dt Where Va is arm ature voltag e, R a0 is arm ature resist ance at ambient temperatu re, α tem perature coefficien t of resis tance , temperatur e above ambient , i a armatur e cur rent, l a is armature inductance , ke is torque consta nt, and ar mature s peed. B. Mech anical eq uation e a l d dt T k i b J T Where b is viscous friction constan t, J is total inertia and T l is load torque . C. Thermal equations The th ermal m o del is derive d by consider ing the p ower dissipati o n an d heat tran sfer [25]. The pow er dissi p ated by the armature current flow ing through the armature r esistan ce, which varies in proporti on to the temperature can be represent ed by : 2 0 ( 1 ) j a a P R i The iron loss is proporti onal to speed square d for constant excitati on, this lo ss variation with speed in the armature body can repres ent by: The iron loss is proporti onal to speed square d for constant excitati on multiplied by the i r on loss constant ir k , this loss variati on with speed in the arm ature b ody can r epresent by : 2 ir ir Pk (IJACSA) International Journal of Advanced Computer Science and Applications, Vol. 7, No. 7, 2016 232 | P a g e www.ijacsa.thesai.org The power losses include contribu tions fr om copper loss es and iron losses w hich frequency dependent: 22 0 ( 1 ) a a ir l P R i k A simple represen tati on o f the assumed DC machine heat flow is given in Fig . 1. Heat f low from the DC motor is eit her directly to the c ooling air w ith heat transfer coeffic ient k . Fig. 1. Structure of t hermal model of DC moto r The thermal po wer flow from the DC m otor surface that is proporti o nal to the difference temperature between the motor and the ambient air temperatu re, an d the temperature variation in the a rmatu re which depends on the thermal ca pacity H . l PH d k dt The effe ct of the cooling f an is approximate d by introducin g a speed dependenc e of the thermal trans fer coefficient T k . 0 ( 1 ) T k k k When K o : thermal transfer coefficient at zero speed and is K T therm al transfe r coefficien t with speed . By arrangin g th e previ ous eqs, we can write: 22 00 ( 1 ) ( 1 ) a a ir T d R i k k k H dt The equati o ns sys tem can be w ritten as: 0 22 00 ( 1 ) 1 1 ( 1 ) ( 1 ) a a e aa a a a e al aT a di R k iV dt l l l k db iT dt J J J k R k k d ir i dt H H H (9) III. S IMULATI ON R ESULTS The resolut ion of the equa tions sy stem (9) in Matlab/Sim ulink envir onmen t w ith the use of par ameters fr om [1], w e get the follow ing results: Fig. 2. A rmature current Fig. 3. Rotor spee d Fig. 4. A verage temperature The current curve variati o n is illustrate d by Fig.2, we can see that in the transient stat the current reach 60A, but in the study state decrease by alm o st a facto r of 10, the final value is 7.27A. Fig.3 shows DC machine s peed variation under load. Fig.4 show s armature average tem p erature in a brushed DC machin e, 0 2000 4000 6000 8000 10000 12000 0 20 40 60 Armaur e curre nt Ia [A] T amps [ S] Ia 0 0.1 0.2 0.3 0.4 0.5 0.6 0. 7 0.8 0.9 1 0 20 40 60 Z OOM A rmatur e curre nt Ia [A ] T amps [ S] Ia 0 2000 4000 6000 8000 10000 12000 -10 0 0 100 200 300 Ro tor speed wr [ rd/s] T amps [ S] wr 0 0 .1 0.2 0.3 0.4 0 .5 0.6 0.7 0.8 0.9 1 0 100 200 Z OOM A rmatur e curren t wr [rd/s T amps [ S] wr 0 2000 4000 6000 8000 10000 12000 0 50 100 Av era ge T emper aturf e T [c 0] T amps [ S] T[c 0] 0 2000 4000 6000 8000 10000 12000 3.5 4 4.5 5 Re sis t ance Ra[Ohm] T amps [ S] Ra [ Ohm] . k × θ DC MACHIN E H , P l , k ir , θ (IJACSA) International Journal of Advanced Computer Science and Applications, Vol. 7, No. 7, 2016 233 | P a g e www.ijacsa.thesai.org this temperatu re reach es 80 0 C af ter 140 m in, the a r matur e resistanc e incr ease 3 1%. IV. A NN E STIMATOR In this secti on, an ANN is used in tree st eps in order to estimate the speed, tempe rature and resis tance. In this section , we discuss the ANN design step, topology choice and the learning a lgorithms fin ally, w e applicat e the A NN to our stud y. A. Typ es of ANN Feed-Forw ard Neural Network (FFNN) is the simples t process neura l network. Each subsequen t layer in FFNN only has a weight coming from the previous layer. Due to the drawback of this t opology structure , FFNN cannot solve s ome complex problems [ 38 ]. The convergence process is slow or even im possible to re alize. To address these pro blems, a CFNN is propos ed here . Fig. 5. The struc ture of the A NN used CFNN are similar to FFNN, but inc lude a conn ection from the input and eve ry previous layer to fol lo win g layers. As with FFNN, a tw o -or more lay er cas cade-netw ork can learn any finite input-output relationshi p a rbitra rily well given enough hidden neu rons [ 38 -29]. B. Da ta sets We hav e creat e a Matl ab program that breaks the inpu t vector into three parts without losing the information of each part, to mak e the data obtained by simulation similar than the sensor data a rand om white- Gaussian n oise sign al has been added. Fig. 6. AN N estimator schemes This noise make the training very hard and requires a significan t time, but the ANN is very trained and applicable on real time. so we have three sets: trainin g, test and validati on, each base part in the input vector o f a w ell -defined percentage, 50% occupi ed by training set, 25% by the testing and 25% by validation s et, this da ta w as e xtracted from Fig. 6. C. Training LMBP is the default trainin g function because it is ve r y fast, but it requires a lot of mem o ry to run [38 - 40 ]. In our case, we have a very large input vector so the problem of exceed memory is imposed. We have created a Matlab program for optimize CFNNE perform ances, such as hidden l ayer number, num b er of neuro ns in each hidden layer, epochs number. For the activation functions, w e try deferent functions, but the hype rbolic tangent sigm oid transfer function for the hidden lay ers and lin ear transfer f unction for the out put are the best . Fig. 7 sh ows A NN estimato r used in the present pa per. Fig. 7. A NN estimator used in t he present pape r V. S IMULATIO N R ESULTS In this section we follow ing the instruct ions discussed in the past section for obtained an optimized CFN NE, traini ng step is the most important step to create any ANN, our optimized CFNNE is trained after 2000 epoch at the perform ance 1.6e- 4. Fig. 8. Speed e stimation by ANN Fig.8 shows DC machine speed estimation and the correspon ding estim ation error at the testing step, in transient state we can see on the speed estimation error curve's a peak of 110 rad/s between the o utpu t of the model and the ANN output, the duration of this peak is 0.3s. In steady state our CFNNE give a good results with estim ation err or less than 0.04 rad/s that means less than 0.008%. 0 2000 4000 6000 8000 10000 12000 -10 0 0 100 200 300 Speed est imati on, rad/s T im e, S 0.8 0.85 0 .9 0.95 1 1.05 1.1 1 .15 1.2 x 10 4 -0.1 -0.05 0 0.05 0.1 Speed esti mation err or, rad/s T im e, S Re al Nb r ErrN br … I nput lay er Outpu t l aye r … … Hidde n lay er Va, Ia ω r T R … … … Ia DC MACHINE Input (Va) ANN CFPNNE Model Output ANN Output Noise … (IJACSA) International Journal of Advanced Computer Science and Applications, Vol. 7, No. 7, 2016 234 | P a g e www.ijacsa.thesai.org Fig. 9. Ave rage temperature estima tion by ANN The tem perature estim ation is show n in Fig.9; th e temperatur e value in the DC machin e thermal steady state is approxim ately 80 0 C, the corre sp onding error is less than 0.6 0 C so, less th an 0.75%. The CFNNE can also estim ate the resist ance, this estimation is show n in Fig. 10 the estim ation error is less than 0.004Ω. Fig. 10. Armature re sistance estimatio n by ANN VI. C ONCLUSION A thermal model of DC motor is presented and some results are d iscussed . T he measurem ent problem s and even the use o f conventional estimators of speed, temperatu re and resistanc e were discussed; the simu ltaneous estimati o n of DC machin e state varia b les and parameters not recognized in the literatu re, our goal is to simulate simu ltaneously the DC machin e speed, temperatu re and resistance. The A NN makes it possible to achieve this goal , because it enabl es t o es timate simu ltaneously the speed, temperatu re and resistance of a DC motor from only the know led ge of voltage and current. T he specializ ed literatu re we give several ANN versions, accordin g to the studi ed system characte ristics the most suitable approach is CFNNE. The creat ion steps of CFNNE and the diffe rent data bases is d iscusse d in Secti o n IV, th e additi on of white Gauss ian noise to the data set is very im portant, because if that which make the applicati on in real time is possible and our ANN not be affected by current and voltage measur ements noise. It can be seen that the network has worked w ith an acceptable error. The variable stat estimatio n may b e used in condition monitoring or in robust contr ol, the sim ulation resu lts demonstrate that the new approach proposed in this paper is feasible . R EFERENCES [1] P. P. Acarnley , J. K. Al-Tayie, Estimation of speed and armature temperature in a brushed DC d rive u sing the extended Kalman filter, IEE Proc El ectr. Powe r Appl., vol. 144, no. 1, pp. 13 – 20 , Jan I997. [2] E. Fiorucci, G. Bucci, F.Ciancetta, D. Gallo, C . Landi and M. Luiso, variable speed drive characterizatio n: review of measurement techniques and future trends, Advances in Powe r Electronics, vol. 2013, pp.1 – 14, 2013. [3] G. Bucci, C. L a ndi, Metrological characterization of a contactle ss smart thrust and speed sensor fo r linear induction motor testing, Instrumentatio n and M easurement, IEEE Transactio n s on , vol. 45, n o.2, pp. 493 – 498, A pr 1996. [4] R. J. Wel ch and G. W. Younkin, How Temperature Affects a Servomoto r's Ele ctrical and Me chanical Time Consta nts, Proc. I EEE Ind. Appl. Confe r ence, vol. 2, pp. 1041 – 1046, 13-18 Oct . 2002. [5] IEEE Recomme nded Practice for Gene ral Principles of Temperature Measurement as Applied to Electr ical Apparatus, IEEE Std 119- 1974,1974. [6] T. Chunder, Te mp erature rise measure ment in armature of a DC motor, under running conditions by telemetry, Proc. Sixth International Conference on El ectrical Machines and Drives, pp . 44 – 48, 8- 10 S ep 1993. [7] L. Michalski, K. Ecker sdorf, J. Kuchars ki, J. McGhee, T emperature Measurement, Joh n Wiley & Sons L td, 2001. [8] I. J. Aucamp, L .J. Grobler, Heating, ventilation and air conditioning manageme nt by means of indoor temperature measureme nts, Proc. 9th conference industrial and commercial use of energy (ICUE), p p. 1 – 4, 15 -16 A ug, 2012. [9] A. Cassat, C. Espa net and N. Wav re, BL DC Motor Stator and Rotor Iron Losses and Thermal Behavior Based o n Lumped Schemes and 3-D FEM Analysis, IEEE Transactions on Industry Applications, vol. 39, no. 5, pp. 1314 – 1322, 20 03. [10] J. Le Besnerais, A. Fasquelle , M . Hecquet, J. Pellé, V. Lanfranch i, S. Harmand, P. Brochet and A. Randria, Multiphy si cs Modeling: Electro- Vibro-Aco ustics and Heat Transfer of PWM- Fed Inductio n Machines, IEEE Transactions on Industrial Electronics, vol. 57, no. 4, pp. 1279 – 1287, 2010. [11] R. Lazar evic, P. Radosavljevic, A. Osmokrovic, novel approach for temperature estimation in squirrel-cage induction motor without sensors , IEEE Transactions on Instrumentation and Measurement, vol. 4 8, no. 3, pp. 753 – 757, 199 9. [12] S. B. Lee , T. G. Habetler , R. G. Harley and D. J. Gritter, A stator and rotor resistance estimation t echnique for c onductor temperature monitoring, Proc. I EEE Ind. A ppl. Confe rence, vol. 1, pp. 381 – 387, 2000. [13] S. B. Lee, T. G. Habetler, R. G . Harl e y a nd D. J. G rit ter, An Evaluation of Model-Based Stator Resistance Estima tion for Indu ction Motor Stator Winding Temperature Monitoring, IEEE Transactions on Energy Conversion, vol . 17, no. 1, pp. 7 – 1 5, 2002. [14] S. B. Le e, T. G. Habetler, An Online Stator Winding Resistance Estimation Technique for Temperature M onitoring of Line-Connecte d Induction Machines, IEEE Transactions on Industry Applications, vol. 39, no. 3, pp. 685 – 694, 2003. [15] K. D. Hurst , T .G. Habetler, A t hermal moni toring and parameter tuning scheme for induction machines, Proc. IEEE Ind. Appl. Conference, IEEE-IA S Annu. Meeting, vol. 1, pp. 136 – 142, 1997. [16] H. Mellah, K. E. Hemsas, Stochast ic Estimation Methods for I ndu ction Motor Transie nt Thermal Monitoring Under Non Linear Condition, Leonardo Jour nal of Science s, vol. 11, pp. 9 5 – 108, 2012. 0 2000 4000 6000 8000 10000 12000 -20 0 20 40 60 80 100 T emperatur e estim ation, deg.C T im e, S Rea l Nbr 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000 11000 12000 -2 -1 0 1 2 Te mper ature est imation error T im e, S ErrN br 0 2000 4000 6000 8000 10000 12000 3.5 4 4.5 5 Re sis t ance est imation T im e, S Re al Nb r 0.9 0.95 1 1.05 1.1 1.15 1.2 x 10 4 -0.05 0 0.05 Re sis t ance est imation erro r T im e, S ErrN br (IJACSA) International Journal of Advanced Computer Science and Applications, Vol. 7, No. 7, 2016 235 | P a g e www.ijacsa.thesai.org [17] J. F. More no, F . P. Hidalgo and M. D. Martinez , Realisation of tests to determine the parameters of th e thermal model of an induction machine, IEE Proc El ectr. Powe r Appl., vol. 148, no. 5 , pp. 393 – 397, 2001. [18] R. Beguenane, M.E.H. Benbouzid, Induction motors thermal monitoring by means of rotor resistance identification, I EEE Transaction on Energy Conversion, vol . 14, no. 3, pp. 566-570, 1999. [19] M.S.N. Saïd, M.E.H. Benbouzid, H – G Diagram Based Rotor Parameters Identification for Induction Motors Thermal Monitoring, I EEE Transactions on Energy Conversion, vol. 15, no. 1, pp. 14 – 18, 2000. [20] Z. Gao, T. G. Habetler, R. G. Harley and R. S. Colby, An Adaptive Kalman Filtering Approach to I n duction Machine Stator Winding Temper ature Est imation Based on a Hybrid Thermal Model, Proc. IEEE Ind. Appl. Confe rence, IEEE-IA S Annu. Meeting, vol. 1, pp. 2 – 9, 2005. [21] R. Pantonial, A. Kilantang and B. Buenaobra, R eal time thermal estimation of a Brushed DC Motor by a steady-state Kalman filter algorithm i n multi-rate sampling scheme, Proc TENCON 2012 I EEE Region 10 Confe rence, pp. 1 – 6, 1 9-22 Nov 201 2. [22] W. Zhang, S. G. Andrew and R.H. Saeid, Nonlinear Estimation of Stator Winding Resistance in a Brushless DC M otor, Proc American Control Conference ( ACC), pp. 4699-4704, 17-19 June 2013. [23] M. Jabri, I. Chouire and N.B. Braiek, Fuzzy Logic Parameter Estimatio n of an Electrical System, Proc. International Multi -Conference on Syste ms, Signals and Devices, p p.1 – 6, 2008. [24] M. Jabri, A. Belgace m and Houssem Jerbi, Moving Horiz on Parameter Estimation of Series Dc Motor Usin g Ge netic Alg orithm, Proc . International Multi -Confere n ce on Sy stems, Signals and De vices, p p. 26 – 27, 200 9. [25] S. A. Kalogirou, Artificial neural n etw o rks in renewable energy systems applications: a review , Renewable and Sustainable Energy Review s, vol. 5, no. 4, pp.3 73 – 401, 2001. [26] E. Byvatov, U . F echner, J . Sadowski and G. Schnei der, Compariso n of support vector machine a nd artif icial n eural network s ystems for drug/nondrug c lassificat ion, Journal of Chemical and mo deling, vol. 43, no. 6, pp. 1882 – 18 89, 27 Sept, 20 03 [27] S. Ag atonovic-Kustrin, R . Bere sford, Basic concepts of artificial ne u ral networ k (ANN) modeling and its applicatio n in pharmaceutical research , Journal of pharmaceutical and Biome dical Analysis, vol. 22, no. 5, pp. 717 – 727, 2000. [28] S. Ablameyko, L.Goras, M. Gorz and V. Piuri, Neural Networks for Instrumentatio n, Measurement and Related Industrial Applications, I OS Press, 2003. [29] S. Haykin, Kalman filtering a nd neural networ ks, John Wiley & Sons, 2001. [30] A. Cochocki, R . Unbehauen, Neural networks for optimization and signal processing. John Wil ey & Sons, I nc, 1993. [31] M . Y. Chow, Y. Tipsuwan, Neural plug -in motor coil thermal modeling, in Industrial Electronics Society, 2000. IECON 2 000. 26th Annual Conference o f the I EEE, vol.3, no., pp.1586 – 1591, 20 00. [32] L. P. Veele nturf, Analysis and applications of arti ficial neural n etwor ks, Prentice-Hall , Inc., 1995. [33] M. Gupta, L . Jin and N. Homma, Static and dynamic neural netw orks: from fundamental s to advance d theory , John Wiley & Sons, 2004. [34] L. C. Jain, N.M. Martin, Fusion of Neural Networks, Fuzzy Systems and Genetic Al gorithms: I ndustrial Applicatio ns, vol. 4, CR C press. 1998. [35] R . C. Eberhart, J. Kennedy, A New Optimizer Using Particle Swarm Theory , Pr oceedings of th e Sixth I nternational Sy mposium o n Micro Machine and H uman Science, MHS '95, vol.1, pp. 39 – 43. 1995. [36] J.S.R. Jang, C. T. Sun and E. M izutani, Neuro-Fuzzy and Soft Computing: A Computational Approach to Learning and M achine Intellige nce, Prentice-Hall, 199 7. [37] C. Dimoulas, G. Kalliris, G. Papanikolaou, V. Petridis and A. Kalampakas, Bowel-sound pattern analysis using wavelets and n eural networ ks with application to long-term, unsupervised, Expert Systems with Applicat ions, vol. 34, no. 1, pp. 26 – 41, 2008. [38] B.M. Wilamow ski, How to not get frustrated w ith neural netw orks, Proc. IEEE I nt. Conf. I nd. Technol, pp. 5 – 11., 201 1. [39] Zhou Yao-ming, M eng Zhi-jun, Chen Xu-zhi and Wu Zhe, Helicopter Engine Performance Prediction based on Ca scade-Forw ard Process Neural Network, IEEE Conference on Prognostics and Health Management (PH M ), pp, 1 – 5, 18-21 J u ne 2012. [40] H. Demuth, M . Beale and M. Hagan, Neural Network Toolbox Users Guide, the Mat hWorks, Na trick, USA. 20 09.
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment