Finite-Time Stability of Switched and Hybrid Systems with Unstable Modes
In this work, we study finite-time stability of switched and hybrid systems in the presence of unstable modes. We present sufficient conditions in terms of multiple Lyapunov functions for the origin of the system to be finite time stable. More specif…
Authors: Kunal Garg, Dimitra Panagou
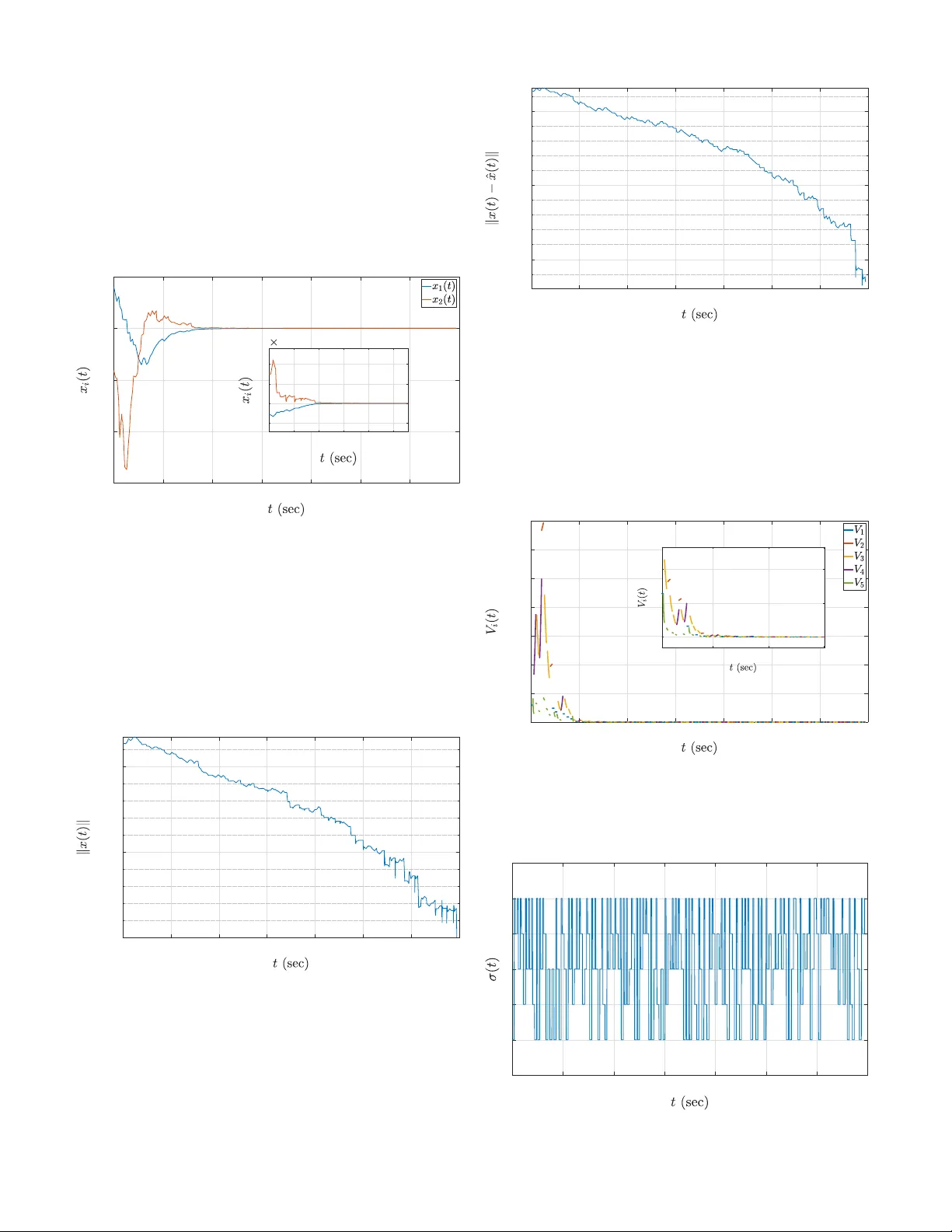
1 Finite-T ime Stability of Switched and Hybrid Systems with Unstable Modes Kunal Garg, Student Member , IEEE and Dimitra Panagou, Senior Member , IEEE Abstract —In this work, we study finite-time stability of switched and hybrid systems in the pr esence of unstable modes. W e present sufficient conditions in terms of multiple L yapunov functions for the origin of the system to be finite time stable. More specifically , we show that even if the v alue of the L yapunov function increases in between tw o switches, i.e., if there ar e unstable modes in the system, finite-time stability can still be guaranteed if the finite time con vergent mode is active long enough. In contrast to earlier work wher e the L yapunov functions are requir ed to be decreasing during the continuous flows and non-increasing at the discrete jumps, we allow the L yapunov functions to increase both during the continuous flo ws and the discrete jumps. As thus, the derived stability results are less conservati ve compared to the earlier results in the related literature, and in effect allow the hybrid system to have unstable modes. Then, we illustrate how the proposed finite-time stability conditions specialize for a class of switched systems, and present a method on the synthesis of a finite-time stabilizing switching signal for switched linear systems. As a case study , we design a finite-time stable output feedback controller for a linear switched system, in which only one of the modes is controllable and observable. Numerical example demonstrates the efficacy of the proposed methods. Index T erms —Finite-Time Stability; Hybrid Systems; Multiple L yapunov Functions. I . I N T RO D U C T I O N Many real-world systems exhibit properties of continuous ev olution and discrete jumps at times, which are termed as hybrid systems . Hybrid systems are capable of modeling large class of complex dynamical systems. The introductory paper [ 1 ] provides an overvie w and the merits of using hierarchical organization within a hybrid systems framew ork; namely , that it helps in managing complexity since it requires less detailed models at higher lev els. The class of switched systems that includes the v ariable structure system and the multi-modal sys- tem is an important subcategory of hybrid systems. There is a variety of practical examples where certain stability properties cannot be achiev ed using a single continuous feedback, and as thus a switching controller becomes essential; for instance, the authors in [ 2 ] mak e their case for the well-studied pendulum on a cart problem. Many control theoretic examples hav e been proposed where switched controller system can provide stability and performance guarantees; see e.g. [ 3 ], [ 4 ], [ 5 ]. Stability of hybrid systems has been studied extensi vely in the literature; for an ov erview of the theory of switched and hybrid The authors would like to acknowledge the support of the Air Force Office of Scientific Research under award number F A9550-17-1-0284. The authors are with the Department of Aerospace Engineering, Uni versity of Michigan, Ann Arbor, MI, USA; { kgarg, dpanagou } @umich.edu . systems, i.e., on solution concepts, notion of stability , the interested readers are referred to [ 6 ] and [ 7 ], [ 8 ], respectively . A. Stability of switched systems Stability of switched system has been analyzed by many researchers in the past. The surve y articles [ 9 ], [ 10 ] and the references therein give a detailed ov erview of v arious stability results for switched and hybrid systems. Stability of switched systems is typically studied using either a common L yapunov function, or multiple L yapunov functions. The book [ 6 ] discusses necessity and sufficienc y of the existence of a common L yapunov function for all subsystems of a switched system for asymptotic stability under arbitrary switching. The authors in [ 3 ] study linear switched systems with dwell-time using a common quadratic control L yapunov function (CQLF) and state-space partitioning. In the revie w article [ 11 ], the authors study the stability of switched linear systems and linear dif ferential inclusions. The y present suf ficient conditions for the existence of CQLFs and discuss conv erse L yapunov results for switched systems. In [ 12 ], the author introduces the concept of multiple L yapunov functions to analyze stability of switched systems; since then, a lot of work has been done on the stability of switched systems using multiple L yapunov functions [ 13 ], [ 14 ], [ 9 ]. In [ 13 ], the authors relax the non-increasing condition on the L yapunov functions by introducing the notion of generalized L yapunov functions. They present necessary and sufficient conditions for stability of switched systems under arbitrary switching. In [ 14 ], the authors introduce the concept of Multiple Linear Copositive L yapunov functions (ML-CLFs) and gi ve sufficient conditions for e xponential stability of Switched Positi ve Linear Systems (SPLS) in terms of feasibility of Linear Matrix Inequali- ties (LMI). The authors in [ 15 ] use discontinuous multiple L yapunov functions in order to guarantee stability of slowly switched systems, where the stable subsystems are required to switch slower (i.e., stay activ e for a longer duration) as compared to unstable subsystems. B. Stability of hybrid systems Unlike switched systems, where only the dynamics of the system is allowed to hav e jumps, the notion of hybrid systems is more general and allows the system states to hav e discrete jumps as well. The survey paper [ 16 ] studies L yapunov stability (LS), Lagrange stability and asymptotic stability (AS) for stochastic hybrid systems (SHS), and pro- vides L yapunov conditions for stability in probability . The paper also presents open problems on con verse results on 2 the stability in probability of SHS. In [ 17 ], the authors study hybrid systems exhibiting delay phenomena (i.e., memory). They establish sufficient conditions for AS using L yapunov- Razumikhin functions and L yapunov-Kraso vskii functionals. More recently , pointwise AS of hybrid systems is studied in [ 18 ], where the notion of set-valued L yapunov functions is used to establish sufficient conditions for AS of a closed set. In [ 19 ], the authors impose an average dwell-time for the discrete jumps and devise L yapunov-based sufficient conditions for exponential stability of closed sets. C. Related work on FTS In contrast to AS, which pertains to con vergence as time goes to infinity , finite-time Stability (FTS) 1 is a concept that requires con ver gence of solutions in finite time. FTS is a well- studied concept, motiv ated in part from a practical vie wpoint due to properties such as conv ergence in finite time, as well as robustness with respect to disturbances [ 20 ]. In the seminal work [ 21 ], the authors introduce necessary and sufficient conditions in terms of L yapunov function for continuous, autonomous systems to e xhibit FTS, with focus on continuous- time autonomous systems. FTS of switched/hybrid systems has gained popularity in the last few years. The authors in [ 22 ] consider the problem of designing a controller for a linear switched system under delay and external disturbance with finite- and fixed-time con vergence. In [ 23 ], the authors design a hybrid observer and show finite-time con vergence in the presence of unknown, constant bias. In [ 24 ], the authors study FTS of nonlinear impulsiv e dynamical systems, and present sufficient conditions to guarantee FTS. The work in [ 23 ], [ 24 ] considers discrete jumps in the system states in a continuously ev olving system, i.e., one model for the continuous dynamics, and one model for the discrete dynamics. The authors in [ 25 ] present conditions in terms of a common L yapunov function for FTS of hybrid systems. They require the value of the L yapunov function to be decreasing during the continuous flo w and non-increasing at the discrete jumps. The authors in [ 26 ] design an FTS state-observ er for switched systems via a sliding-mode technique. In [ 27 ], the au- thors introduce the concept of a locally homogeneous system, and sho w FTS of switched systems with uniformly bounded uncertainties. More recently , [ 28 ] studies FTS of homogeneous switched systems by introducing the concept of hybrid ho- mogeneous degree, and relating negati ve homogeneity with FTS. In [ 29 ], the authors consider systems in strict-feedback form with positiv e powers and design a controller as well as a switching law so that the closed-loop system is FTS. The authors in [ 30 ] present conditions in terms of a common L yapunov function for FTS of hybrid systems. They require the value of the L yapunov function to be decreasing during the continuous flo w , and non-increasing at the discrete jumps. In [ 31 ], the authors design an FTS observer for switched systems with unknown inputs. They assume that each linear subsystem is str ongly observable, and that the first switching occurs after 1 W ith slight abuse of notation, we use FTS to denote the phrase ”finite-time stability” or ”finite-time stable”, depending on the context. an a priori known time. In contrast, in the current paper we do not assume that the subsystems are homogeneous or in strict feedback form, and present conditions in terms of multiple L yapunov functions for FTS of the origin. The work in [ 32 ] studies FTS of impulsive dynamical linear systems (IDLSs); impulsive systems describe the ev olution of systems where the continuous dev elopment of a process is interrupted by abrupt changes of state [ 33 ]. In [ 34 ], the authors extend these results and show that the conditions in [ 32 ] are also necessary for FTS of IDLs. The authors in [ 30 ] present conditions in terms of a common L yapunov function for establishing FTS of hybrid systems. In [ 35 ], the authors consider the switched system with an assumption that each subsystem possess a homogeneous L yapunov function and that the switching-interv als are constant. D. Our Contrib utions In this paper , we consider a general class of hybrid systems, and dev elop sufficient conditions for FTS of the origin of the hybrid system in terms of multiple L yapunov functions. T o the best of authors’ knowledge , this is the first work considering FTS of switched or hybrid systems using multiple Lyapuno v functions . The main contributions are summarized as follows. FTS of hybrid systems with unstable modes : W e first define the notion of FTS for hybrid systems so that it does not restrict each mode of the hybrid system to be FTS in itself. More specifically , we relax the requirement in [ 13 ], [ 25 ], [ 30 ] that the L yapunov function is non-increasing at the discrete jumps, and strictly decreasing during the continuous flow; instead, we allow the multiple L yapunov functions to increase both during the continuous flow and at the discrete jumps, and only require that these increments are bounded. In this respect, we allo w the hybrid system to have unstable modes while still guaranteeing FTS. In addition, we present a novel proof on the stability of the origin using multiple L yapunov functions under the aforementioned relaxed conditions. In contrast to [ 23 ], [ 24 ], we consider the general case with N f continuous flows and N g discrete jump dynamics, where N f , N g can be any positive integers. The main result is that if the origin is uniformly stable, i.e., stable under arbitrary switching, and if there exists an FTS mode that is activ e for a sufficient cumulativ e time, then the origin of the resulting hybrid system is FTS. FTS of switched systems : Then, we demonstrate how the results specialize for a class of switched systems with unstable subsystems. In contrast to [ 26 ], [ 29 ], we do not assume that the subsystems of the switched system are homogeneous or in strict feedback form, and present conditions for FTS of a class of switched systems. Switching-signal design for FTS, and applications : W e present a method for designing a switching signal so that the origin of the resulting switched system is FTS. W e then apply our dev eloped methods to design an FTS output controller for switched linear systems for the case when only one of the subsystems (or modes) is controllable and observ able. 3 E. Or ganization The paper is organized as follows: In Section II , we present an overvie w of FTS followed by conditions for FTS of hybrid systems. In Theorem 2 , we present conditions for LS and FTS of the origin in terms of multiple L yapunov functions, and then, show that uniform stability and sufficiently long activ ation of FTS mode is sufficient for FTS in Corollary 1 . In Section III , we specialize our results for a class of switched systems. W e also present a method of designing finite-time stabilizing switching law and as a case study , design FTS output-feedback for switched linear system for the case when only one of the subsystems is both controllable and observable. Section IV ev aluates the performance of the proposed method via simulation results. Our conclusions and thoughts on future work are summarized in Section V . I I . F T S O F H Y B R I D S Y S T E M S A. Pr eliminaries W e denote by k · k the Euclidean norm of vector ( · ) , | · | the absolute value if ( · ) is scalar and the length if ( · ) is a time interval. The set of non-negati ve reals is denoted by R + , set of non-negativ e integers by Z + and set of positi ve integers by N . W e denote by int ( S ) the interior of the set S , and by t − and t + the time just before and after the time instant t , respectiv ely . Definition 1. ( Class- G K function ): A function α : D → R + , D ⊂ R + , is called a class- G K function if it is increasing , i.e., for all x > y ≥ 0 , α ( x ) > α ( y ) , and right continuous at the origin with α (0) = 0 . Definition 2. ( Class- G K ∞ function ): A function α : R + → R + is called a class- G K ∞ function if it is a class- G K function, and lim r →∞ α ( r ) = ∞ . Note that the class- G K (respectively , G K ∞ ) functions have similar composition properties as those of class- K (respec- tiv ely , class- K ∞ ) functions, e.g., for α 1 , α 2 ∈ G K and α ∈ K , we ha ve: • α 1 ◦ α 2 ∈ G K and α 1 + α 2 ∈ G K ; • α ◦ α 1 ∈ G K , α 1 ◦ α ∈ G K and α 1 + α ∈ G K . Consider the system: ˙ y ( t ) = f ( y ( t )) , (1) where y ∈ R n , f : D → R n is continuous on an open neighborhood D ⊆ R n of the origin and f (0) = 0 . The origin is said to be an FTS equilibrium of ( 1 ) if it is L yapunov stable and finite-time con ver gent , i.e., for all y (0) ∈ N \ { 0 } , where N is some open neighborhood of the origin, lim t → T y ( t ) = 0 , where T = T ( y (0)) < ∞ [ 21 ]. The authors also presented L yapunov conditions for FTS of the origin of ( 1 ): Theorem 1 ([ 21 ]) . Suppose there exists a continuous function V : D → R suc h that the following holds: (i) V is positive definite (ii) There exist real numbers c > 0 and α ∈ (0 , 1) , and an open neighborhood V ⊆ D of the origin such that ˙ V ( y ) ≤ − cV ( y ) α , y ∈ V \ { 0 } . (2) Then the origin is an FTS equilibrium for ( 1 ) . B. Main r esult W e consider the class of hybrid systems H = {F , G , C, D } described as ˙ x ( t ) = f σ f ( t,x ) ( x ( t )) , x ( t ) ∈ C , x ( t + ) = g σ g ( t,x ) ( x ( t )) , x ( t ) ∈ D , (3) where x ∈ R n is the state vector with x ( t 0 ) = x 0 , f i ∈ F , { f k } for k ∈ Σ f , { 1 , 2 , . . . , N f } is the continuous flow (called thereafter , continuous-time mode, or simply , mode) allowed on the subset of the state space C ⊂ R n , and g j ∈ G , { g l } for l ∈ Σ g , { 1 , 2 , . . . , N g } defines the discrete behavior (called thereafter discrete-jump dynamics), which is allowed on the subset D ⊂ R n . Define x + ( t ) , x ( t + ) . The switching signals σ f : R + × R n → Σ f and σ g : R + × R n → Σ g are assumed to be piece wise constant and right-continuous, in general dependent upon both state and time. W e omit the argument ( t, x ) from the functions σ f , σ g for sake of bre vity . Remark 1. Note that ( 3 ) is a gener alization of system (1.2) in [ 8 , Chapter 1] that is given as: ˙ x ( t ) = f ( x ( t )) , x ( t ) ∈ C , x ( t + ) = g ( x ( t )) , x ( t ) ∈ D , (4) that describes a hybrid system with one continuous flow f , and one discr ete-jump dynamics g , i.e., N f = N g = 1 . Further- mor e, ( 3 ) is a special case of system (1.1) in [ 8 , Chapter 1], given in terms of differ ential inclusion and differ ence inclusion as: ˙ x ( t ) ∈ F ( x ) , x ( t ) ∈ C, x ( t + ) ∈ G ( x ) , x ( t ) ∈ D , (5) wher e F , G : R n ⇒ R n ar e set-valued maps. Assumption 1. The functions f i ar e continuous for all i ∈ Σ f . The origin is the only equilibrium point for all the continuous flows and discr ete jumps, i.e., f i ( x ) = 0 ⇐ ⇒ x = 0 for all i ∈ Σ f and g j ( x ) = 0 ⇐ ⇒ x = 0 for all j ∈ Σ g . Per Assumption 1 , we restrict our attention to the case where there is a unique equilibrium for the hybrid system ( 3 ). The case when there exists some g j ∈ G and a set ¯ D 6 = { 0 } such that g j ( x ) = 0 for all x ∈ ¯ D ⊂ D can be treated by studying stability of set ¯ D ; see [ 25 ], [ 30 ]. A mode F ∈ Σ f is called an FTS subsystem or FTS mode if the origin of ˙ y = f F ( y ) is FTS. Denote by T i k = [ t i k , t i k +1 ) the interval in which the flo w f i is active for the k − th time for i ∈ Σ f and k ∈ N , and t d j m the time when discrete jump x + = g j ( x ) takes place for the m − th time for j ∈ Σ g and m ∈ N . Define J i = { t d j m | t d j m ∈ T i k , j ∈ Σ g , m ∈ N } as the set of all time instances when a discrete jump takes place when the continuous flo w f i is active. W ithout loss of generality , we assume that the switching signals σ f and σ g are minimal, i.e., for any i ∈ Σ f , t i k +1 6 = t i k +1 for all k ∈ R + , and that there no two discrete-jumps at the same time instant. Inspired by [ 36 , Definition 1] and [ 8 , Definition 2.6], let us define the concepts of the solution of the hybrid system ( 3 ) 4 as follows (interested reader is referred to [ 8 , Chapter 2] for detailed presentation on solution concept of h ybrid systems). Definition 3. Let φ : R + × Z + → R n satisfy the following: • for all j ∈ Z + , – φ ( t, j ) is continuously differ entiable for all t ∈ S k T l k \ ( S i J i ) for all l ∈ Σ f ; – φ ( · , j ) is absolutely continuous on R + \ ( S i J i ) and right-continuous on R + ; – φ ( t, j ) satisfies ˙ φ ( t, j ) = f σ f ( φ ( t, j )) , for all φ ( t, j ) ∈ C , and for all t ∈ R + \ ( S i J i ) ; • for all t ∈ S i J i , φ ( t, j ) satisfies φ ( t, j + 1) = g σ g ( φ ( t, j )) , for all φ ( t, j ) ∈ D , and for all j ∈ Z + ; Then, the pr ojection of φ ( · , · ) on its first ar gument, i.e., on continuous-time axis, is a solution of ( 3 ) . In other words, a function x : R + → R n , defined as x ( t ) = φ ( t, j ) for all j ∈ N , t ∈ R + \ ( S i J i ) , and x ( t + ) = φ ( t, j + 1) , for all j ∈ N and for all t ∈ S i J i , is called as a solution of ( 3 ) . Remark 2. In [ 8 ], the solutions of hybrid systems ar e de- scribed using a hybrid arc φ : R + × Z + → R n , which is parameterized by continuous-time t ∈ R + and discrete- jump time j ∈ Z + . Since we ar e only concerned about the stability in the continuous-time t , we define the solution of ( 3 ) in Definition 3 as the pr ojection of the function φ on the continuous-time axis. Let dom φ ⊂ R + × Z + denote the domain of definition of function φ . Based on the structure of dom φ , the solutions of ( 3 ) can be characterized in various ways, as discussed belo w . Definition 4. The solution of ( 3 ) is • non-trivial , if dom φ contains at least one mor e point differ ent fr om (0 , 0) ; • complete , if dom φ is unbounded; • Zeno , if it is complete b ut the projection of dom φ on R + is bounded; • maximal , if dom φ cannot be extended; • continuous , if non-trivial, and dom φ ⊂ R + × { 0 } ; • discrete , if non-trivial, and dom φ ⊂ { 0 } × Z + ; • eventually continuous , if non-trivial and J = sup j dom φ < ∞ ; • eventually discrete , if non-trivial and T = sup t dom φ < ∞ ; • compact , if dom φ is compact. Before presenting the main result, we make the following assumption on the solution of ( 3 ). Similar assumptions ha ve been used in literature (e.g., [ 13 ], [ 25 ], [ 37 ]) in order to analyze stability properties of the origin of hybrid systems. Assumption 2. The solution of ( 3 ) exists, is non-Zeno, non- trivial and complete. Assumption 2 , in light of Definitions 3 and 4 , implies that the solution x ( · ) of ( 3 ) is defined for all times, is continuously differentiable while ev olving along any of the continuous flows f i , is absolutely continuous between any two discrete jumps, and is right-continuous at all times. For each interval T i k , define the largest connected sub- interval ¯ T i k ⊂ T i k , such that there is no discrete jump in ¯ T i k , i.e., int ( ¯ T i k ) T J i = ∅ . For example, if T i 1 = [0 , 1) and J i = { 0 . 2 , 0 . 4 , 0 . 75 } , then ¯ T i 1 = [0 . 4 , 0 . 75) . Assumption 3. F or mode F ∈ Σ f , the length | ¯ T F k | of the time interval ¯ T F k satisfies | ¯ T F k | ≥ t d > 0 for all k ∈ N . Assumption 3 implies that for the FTS flow f F , in each interval T F k when the system ( 3 ) e volves along the flo w f F , there exists a sub-interval ¯ T F k of non-zero length t d such that there is no discrete jump in the system state during ¯ T F k . W e first define the notion of FTS for hybrid systems. The standard notion of stability under arbitrary switching, as employed in [ 6 ], [ 9 ], [ 12 ], [ 13 ], [ 29 ], is restrictive in the following sense. The conditions therein require ev ery single mode of the system ( 3 ) to be L yapunov Stable (LS or simply , stable), Asymptotically Stable (AS), or FTS for the origin of the system ( 3 ) to be LS, AS, or FTS, respectiv ely . W e ov ercome this limitation by defining the corresponding notions of stability and uniform stability for hybrid system (inspired in part, from [ 38 , Theorem 1]) as follo wing. Let Π ⊂ PWC ( R + × R n , Σ f × Σ g ) denote the set of all possible pairs of switching signals, where PWC is the set of all piece- wise constant functions mapping from R + × R n to Σ f × Σ g . Definition 5. The origin of the hybrid system ( 3 ) is called LS, AS or FTS if there e xists an open neighborhood D ⊂ R n such that for all y , x (0) ∈ D , ther e exists a subset of switching signals Π y ⊂ Π such that the origin of the system ( 3 ) is LS, AS or FTS, r espectively , with r espect to ( σ f , σ g ) , for all ( σ f , σ g ) ∈ Π y . If Π y = Π for all y ∈ D , then the origin is said to be uniformly LS, AS or FTS . Per Definition 5 , FTS of the origin of ( 3 ) is realized under a (given set of) switching signal(s), while uniform FTS of the origin is realized under any arbitrary switching signal. Note that the aforementioned papers use the latter notion of uniform stability in their analysis. Let ¯ T F k = [ ¯ t F k , ¯ t F k +1 ) with ¯ t F k +1 − ¯ t F k ≥ t d , and { ¯ V F 1 , ¯ V F 2 , . . . , ¯ V F p } and { ¯ V F 1 +1 , ¯ V F 2 +1 , . . . , ¯ V F p +1 } be the sequence of the v alues of the L yapunov function V F at the beginning and at end of the interv als ¯ T i k , respectiv ely . Let { i 0 , i 1 , . . . , i l , . . . } ∈ Σ f be the sequence of modes that are activ e during the intervals [ t 0 , t 1 ) , [ t 1 , t 2 ) , . . . , [ t l , t l +1 ) , . . . , respectiv ely . W e state the follo wing result before we proceed to the main theorem. Lemma 1. Let a i , b i ≥ 0 ar e such that a i ≥ b i for all i ∈ { 1 , 2 , . . . , K } for some K ∈ N . Then, for any 0 < r < 1 , we have K X i =1 ( a r i − b r i ) ≤ K X i =1 ( a i − b i ) r . (6) The proof is gi ven in Appendix A . W e now present our main result on FTS of hybrid systems. Theorem 2. The origin of ( 3 ) is LS if there exist Lyapuno v functions V i for eac h i ∈ Σ f such that the following hold: (i) Ther e exists α 1 ∈ G K , such that p X k =0 V i k +1 ( x ( t k +1 )) − V i k ( x ( t k +1 )) ≤ α 1 ( k x 0 k ) , (7) 5 holds for all p ∈ Z + ; (ii) Ther e exists α 2 ∈ G K such that p X k =0 V i k ( x ( t k +1 )) − V i k ( x ( t k )) ≤ α 2 ( k x 0 k ) , (8) holds for all p ≥ 0 ; (iii) Ther e exists α 3 ∈ G K such that for all i ∈ Σ f , X t ∈ J i V i ( x + ( t )) − V i ( x ( t )) ≤ α 3 ( k x 0 k ); . (9) If, in addition, ther e exist switching signals ( σ f , σ g ) and, (iv) Ther e exists F ∈ Σ f such that the origin of ˙ y = f F ( y ) is FTS, and there exist a positive definite Lyapunov function V F and constants c > 0 , 0 < β < 1 such that ˙ V F ≤ − cV β F , (10) for all t ∈ S [ t F k , t F k +1 ) \ J F ; (v) The accumulated dur ation ¯ T F , P k ¯ T F k corr esponding to the period of time during which the mode F is active without any discr ete jumps, satisfies ¯ T F = γ ( k x 0 k ) , α ( k x k ) 1 − β c (1 − β ) + ¯ α ( k x k ) 1 − β c (1 − β ) , wher e α = α 0 + α 1 + α 2 + N f α 3 , ¯ α = α 1 + α 2 + N f α 3 and α 0 ∈ G K , then, the origin of ( 3 ) is FTS with respect to the switching signal ( σ f , σ g ) . Mor eover , if all the conditions hold globally , the functions V i ar e radially unbounded for all i ∈ Σ f , and α l ∈ G K ∞ for l ∈ { 1 , 2 , 3 } , then the origin of ( 3 ) is globally FTS. Pr oof: First we prove the stability of the origin under conditions (i)-(iii). Let x 0 ∈ D , where D is some open neighborhood of the origin. For all p ∈ Z + , we hav e that V i p ( x ( t p )) = V i 0 ( x ( t 0 )) + p X k =1 V i k ( x ( t k )) − V i k − 1 ( x ( t k )) + p − 1 X k =0 V i k ( x ( t k +1 )) − V i k ( x ( t k )) + p X k =0 X t ∈ J k T [ t k ,t k +1 ) V i k ( x ( t + )) − V i k ( x ( t )) ( 7 ) , ( 8 ) , ( 9 ) ≤ α ( k x 0 k ) where α = α 0 + α 1 + α 2 + N f α 3 with α 0 ( r ) = max i ∈ Σ f , k x k≤ r V i ( x ) . Thus, we ha ve: V i p ( x ( t p )) ≤ α ( k x 0 k ) , (11) for all p ∈ Z + . Let d i ( c ) = { x | V i ( x ) ≤ c } denote the c sub-le vel set of the L yapunov function V i , i ∈ Σ f , and B ρ = { x | k x k ≤ ρ } denote a ball centered at the origin with radius ρ ∈ R + . Define r ( c ) = inf { ρ ≥ 0 | d i ( c ) ⊂ B ρ } as the radius of the smallest ball centered at the origin that encloses the c sub-lev el sets d i ( c ) , for all i ∈ Σ f (see Figure 1 ). Since the functions V i are positiv e definite, the sub-level sets d i ( c ) are bounded for small c > 0 , and hence, the function r is Fig. 1. The ball B ρ , shown in dotted yellow , encloses c sublevel sets of the L yapunov functions V i , whose boundaries are shown in solid lines. in vertible. The in verse function c = r − 1 ( ) maps the radius > 0 to the value c such that the sub-lev el sets d i ( c ) are contained in B for all i ∈ Σ f . For any gi ven > 0 , choose δ = α − 1 ( r − 1 ( )) > 0 so that ( 11 ) implies that for k x 0 k ≤ δ , we ha ve V i p ( x ( t p )) ≤ α ( k x 0 k ) ≤ α ( α − 1 ( r − 1 ( ))) = r − 1 ( ) = ⇒ k x ( t p ) k ≤ , for all p ∈ Z + , i.e., the origin is LS. Next, we prov e FTS of the origin when conditions (i v)-(v) also hold. From ( 11 ), we hav e that V F ( x ( t F i )) ≤ α ( k x 0 k ) , (12) for all i ∈ N . By definition, we have that there is no discrete jump during ¯ T F k , for all k ∈ N . Let M ∈ N denote the total number of times the mode F is activ ated. From condition (iv), we hav e ˙ V F ≤ − cV β F for all t ∈ S ¯ T F k . Using this, we obtain that for any M , we have | ¯ T F k | ≤ ¯ V 1 − β F k c (1 − β ) − ¯ V 1 − β F k +1 c (1 − β ) = ⇒ M X k =1 | ¯ T F k | ≤ M X k =1 ¯ V 1 − β F k c (1 − β ) − ¯ V 1 − β F k +1 c (1 − β ) = ¯ V 1 − β F 1 c (1 − β ) + M − 1 X i =1 ¯ V 1 − β F i +1 − ¯ V 1 − β F i +1 c (1 − β ) − ¯ V 1 − β F M +1 c (1 − β ) . Using ( 12 ), we obtain that V 1 − β F 1 c (1 − β ) ≤ α ( k x 0 k ) 1 − β c (1 − β ) . (13) Define γ 1 ( k x 0 k ) , α ( k x 0 k ) 1 − β c (1 − β ) so that γ 1 ∈ G K . Now , let I 1 = { i 1 , i 2 , . . . , i k } , 0 ≤ i l ≤ M , be the set of indices such 6 that ¯ V F i +1 ≥ ¯ V F i +1 for i ∈ I 1 . W e know that for a, b ≥ 0 , a ≥ b = ⇒ a r ≥ b r for r > 0 . Hence, we ha ve that M − 1 X i =1 ¯ V 1 − β F i +1 − ¯ V 1 − β F i +1 c (1 − β ) ≤ X i ∈ I 1 ¯ V 1 − β F i +1 − ¯ V 1 − β F i +1 c (1 − β ) (14) Using Lemma 1 , we obtain that X i ∈ I 1 ¯ V 1 − β F i +1 − ¯ V 1 − β F i +1 c (1 − β ) ≤ X i ∈ I 1 ( ¯ V F i +1 − ¯ V F i +1 ) 1 − β c (1 − β ) . (15) From the analysis in the first part of the proof, we know that ¯ V F i +1 − ¯ V F i +1 = l 2 − 1 X k = l 1 V i k ( x ( t k )) − V i k − 1 ( x ( t k )) + l 2 − 1 X k = l 1 V i k ( x ( t k +1 )) − V i k ( x ( t k )) + l 2 − 1 X k = l 1 X t ∈ J k T [ t k ,t k +1 ) V i ( x + ( t )) − V i ( x ( t )) , where l 1 , l 2 are such that t l 1 denotes the time when mode F becomes deactiv ated for the i -th time and t l 2 denotes the time when the mode F is activ ated for ( i + 1) -th time. Define ¯ α = α 1 + α 2 + N f α 3 so that we ha ve X i ∈ I 1 ¯ V F i +1 − ¯ V F i +1 ≤ ¯ α ( k x 0 k ) . Hence, we hav e that M − 1 X i =1 ¯ V 1 − β F i +1 − ¯ V 1 − β F i +1 c (1 − β ) ≤ P i ∈ I 1 ( ¯ V F i +1 − ¯ V F i +1 ) 1 − β c (1 − β ) ≤ ¯ α ( k x 0 k ) 1 − β c (1 − β ) . (16) Define γ ( k x 0 k ) , γ 1 ( k x 0 k ) + ¯ α ( k x 0 k ) 1 − β c (1 − β ) so that we obtain: ¯ T F + ¯ V 1 − β F M +1 c (1 − β ) ≤ ¯ V 1 − β F 1 c (1 − β ) + M − 1 X i =1 ¯ V 1 − β F i +1 − ¯ V 1 − β F i +1 c (1 − β ) ≤ γ ( k x 0 k ) . Clearly , γ ∈ G K . No w , with ¯ T F = γ ( k x 0 k ) , we obtain ¯ T F + ¯ V 1 − β F M +1 c (1 − β ) ≤ γ ( k x 0 k ) = ¯ T F , which implies that ¯ V 1 − β F M +1 c (1 − β ) ≤ 0 . Howe ver , ¯ V F ≥ 0 , which further implies that ¯ V F M +1 = 0 . Hence, if mode F is activ e for the accumulated time ¯ T F without any discrete jump in the system state, the value of the function V F con verges to 0 as t → ¯ t F M +1 . From Assumption 3 , | ¯ T F k | ≥ t d for all k ∈ N , and hence M t d ≤ M P i =1 | ¯ T F k | = γ ( k x 0 k ) , which implies that M ≤ γ ( k x 0 k ) t d < ∞ (i.e., the number of times the mode F is acti vated is finite). Next we show that the time of conv ergence is also finite, i.e., ¯ t F M +1 < ∞ . From the above analysis, we hav e that if M P i =1 | ¯ T F i | = ¯ T F , then there exists an interval [ ¯ t F M , ¯ t F M +1 ) such that ¯ V F M +1 = 0 . Since ¯ V F i ≤ ¯ α ( k x 0 k ) < ∞ , we obtain that ¯ t F M +1 − ¯ t F M ≤ ¯ V 1 − β F M − ¯ V 1 − β F M +1 c (1 − β ) ≤ ¯ V 1 − β F M c (1 − β ) < ∞ , (17) for all x 0 ∈ D . Now , there are two cases possible. If ¯ t F M < ∞ , then, we obtain that ¯ t F M +1 ≤ ¯ t F M + ¯ α ( k x 0 k ) 1 − β c (1 − β ) < ∞ for all x 0 ∈ D . If ¯ t F M = ∞ , we obtain that the time of activ ation for mode F is ¯ T F = M − 1 P i =1 | ¯ T i | < γ ( k x 0 k ) , which howe ver contradicts condition (v). Thus, for condition (v) to hold, it is required that ¯ t F M < ∞ and therefore ¯ t F M +1 < ∞ . Hence, the trajectories of ( 3 ) reach the origin within a finite number of activ e intervals of the continuous flow f F . This prov es that the origin is FTS. Finally , if all the conditions (i)-(v) hold globally and the functions V i are radially unbounded, we hav e that α 0 is also radially unbounded. Since α 1 , α 2 , α 3 , α 4 ∈ G K ∞ , we hav e ¯ α ( k x 0 k ) < ∞ for all k x 0 k < ∞ , and hence, we obtain t F M +1 ≤ t F M + ¯ α ( k x 0 k ) 1 − β c (1 − β ) < ∞ for all x 0 , which implies global FTS of the origin. Remark 3. Theor em 2 essentially says that a set of sufficient conditions for FTS of the origin of ( 3 ) ar e as follows: a) the origin is uniformly LS; b) ther e exists a FTS mode F ∈ Σ f , and a function V F that satisfies ( 10 ) ; and that c) the FTS mode F is active for a sufficient amount of cumulative time, whic h depends upon the initial conditions. This is formally stated in the following cor ollary . Corollary 1. Suppose that the origin of ( 3 ) is uniformly LS, and that ther e e xists an FTS mode F ∈ Σ f and a corr esponding positive definite function V F satisfying ( 10 ) . Then, the origin is FTS if there exists a switching signal ( σ f , σ g ) such that the FTS mode F is active for a cumulative time of ¯ γ ( k x 0 k ) , wher e ¯ γ ∈ G K . The proof is giv en in Appendix B . In light of this obser- vation, Theorem 2 can be further interpreted as: If uniform stability of the origin can be established, then the presence of a switching signal and an FTS mode such that the latter is activ e for a sufficient amount of time is sufficient to guarantee FTS of the origin for the overall system. Note that uniform stability , and not just stability , of the origin is required in the abov e result as there might exist cases where the origin is stable for a particular pair of switching signals ( σ f , σ g ) such that FTS mode F is not activ e at all, and switching to the FTS mode leads to instability (see [ 12 ] for an example of the case where introducing an AS mode results into instability of the origin that is otherwise AS). Uniform stability ensures that the origin is stable under arbitrary switching signals, ruling out such a possibility . T o assess uniform L yapunov stability of the origin, one can use either the conditions in terms of multiple generalized L ya- punov functions in [ 13 ], or conditions in terms of a common L yapunov function [ 17 ], [ 18 ]; then, the conditions (iv)-(v) of Theorem 2 can be checked independently to establish FTS of the origin. 7 Remark 4. In practice, the conditions (i)-(iii) or those pre- sented in [ 13 ] can be difficult to verify for a general class of hybrid system involving non-linear subsystems; the study of finding Lyapuno v functions to assess stability for hybrid systems is an open field of r esear ch, and is out of scope of this work. In Section III-B , we present a method of designing switching signal σ f and functions V i for a class of switched linear systems. C. Discussion on the main result Fig. 2. Conditions (i), (ii) and (iii) of Theorem 2 regarding the allo wable changes in the values of the L yapunov functions. The increments shown by blue, red and black double-arrows pertain to condition (i), (ii) and (iii), respectiv ely . Intuitive explanation of the conditions of Theorem 2 : Condition (i) means that at switching instants of the dynamics of continuous flows (i.e., at switches in signal σ f ), the cumula- tiv e value of the differences between the consecuti ve L yapunov functions is bounded by a class- G K function. Condition (ii) means that the cumulative increment in the values of the individual L yapunov functions when the respecti ve modes are activ e, is bounded by a class- G K function (see Figure 2 ). 2 Condition (iii) means that the cumulative increment in the value of the L yapunov function V i is bounded by a class- G K function at the discrete jumps. Condition (iv) means that there exists an FTS mode F ∈ Σ . Finally , condition (v) means that the FTS mode F is acti ve for a sufficiently long cumulativ e time γ ( k x 0 k ) without any discrete jump occurring in that cumulativ e period. Depending upon the application at hand, and a vailable authority on the design of the switching signal, the FTS mode can be made activ e for γ ( k x 0 k ) duration in one activ ation period, or in multiple activ ation periods. Comparison with earlier results : In contrast to [ 13 , Proposition 3.8], where the authors provided necessary and sufficient conditions for stability of switched system under ( 11 ) and non-increasing condition on the L yapunov functions during activ ation period, we proved stability of the origin with just ( 11 ). Compared to [ 25 ], [ 30 ], our results are less conservati ve in the sense that the L yapunov functions are allowed to increase during the continuous flows (per ( 8 )), as well as at the discrete jumps (per ( 9 )). In other words, 2 Note that some authors use the time deriv ative condition, i.e., ˙ V i ≤ λV i with λ > 0 , in place of condition (ii), to allo w growth of V i , hence, requiring the function to be continuously differentiable (e.g. [ 39 ]). Our condition allows the use of non-differentiable L yapunov functions. we allow unstable modes as well as unstable discrete-jumps (i.e., discrete jump x + = g ( x ) such that V ( g ( x )) > V ( x ) for some positiv e definite function V ) to be present in the hybrid system while still guaranteeing FTS of the origin. Also, during the continuous flo ws, the L yapunov functions are allowed to gro w when switching from one continuous flow to another (per ( 7 )), whereas the aforementioned work imposes that the common L yapunov function is always non-increasing. In contrast to some of the previous work e.g., [ 25 ], [ 28 ], [ 39 ], [ 40 ], except for V F we do not require the L yapunov functions to be differentiable. The usefulness of Lemma 1 : In general, the inequality ( 16 ) can be difficult to obtain directly . Consider the case when we only know that the mode F is homogeneous, with negativ e degree of homogeneity . From [ 41 , Theorem 7.2], we know that condition (iii) of Theorem 2 holds for some β , b ut its exact value might not be known. In this case, it is not possible to bound the left-hand side (LHS) of ( 16 ). Lemma 1 allows one to bound this LHS with a class- G K function without explicitly knowing the v alue of β . Remarks on Assumption 3 : W e discuss the relation of Assumption 3 with the average dwell-time (ADT) for discrete jumps method that is often used in the literature [ 19 ]. Discrete jumps under ADT means that in any giv en interval [ t 1 , t 2 ] , the number of discrete jumps of the states N ([ t 1 , t 2 ]) satisfies N ([ t 1 , t 2 ]) ≤ N 0 + δ ( t 2 − t 1 ) , where δ ≥ 0 and N 0 ≥ 1 . (see [ 19 ], [ 40 ]). W e note that if the conditions of the ADT method hold for the mode F , instead of the minimum dwell- time condition of Assumption 3 , then the FTS result still holds since the parameter M used in the proof of Theorem 2 can be defined as M = N 0 + δ T F , where T F is the total time of activ ation of mode F . Note that if Assumption 3 does not hold, one can construct a counter-e xample where the system would need to execute a Zeno behavior in order to achiev e FTS. Consider the case when | ¯ T F k | = ¯ T F 2 k . It is clear that for M P k =1 | ¯ T F k | → ¯ T F , we need M → ∞ . Hence, this would require infinite number of switches from some mode i 6 = F to the mode F in a finite amount of time ¯ T F , i.e., the system would need to ex ecute a Zeno behavior to achieve FTS. With Assumption 3 , we obtain that M ≤ ¯ T F t d < ∞ , which rules out this possibility . I I I . F T S O F S W I T C H E D S Y S T E M S A. FTS r esult In this subsection, we illustrate how the case of switched systems, i.e., of systems without discrete jumps in their states, is a special case of the results deriv ed above. In summary , in the case of a switched system, Theorem 2 guarantees FTS of the origin under conditions (i), (ii), (iv) and (v); condition (iii) is obsolete since D = ∅ . As a side note, if in addition to D = ∅ , one has that N f = 1 , i.e., if the system ( 3 ) reduces to a continuous-time dynamical system, Theorem 2 reduces to Theorem 1 . Thus, the seminal result on FTS of continuous- time systems is a special case of Theorem 2 . Consider the system ˙ x ( t ) = f σ ( t,x ) ( x ( t )) , x ( t 0 ) = x 0 , (18) 8 where x ∈ R n is the system state, σ : R + × R n → Σ is a piecewise constant, right-continuous switching signal that can depend both upon state and time, Σ , { 1 , 2 , . . . , N } with N < ∞ , and f σ ( · , · ) : R n → R n is the system vector field describing the active subsystem (called thereafter mode) under σ ( · , · ) . Note that ( 18 ) is a special case of ( 3 ) with D = ∅ . Hence, the solution of ( 18 ) is giv en by Definition 3 , and does not exhibit discrete jumps, i.e., the solution is continuous. Similarly , FTS of the origin of ( 18 ) is defined per Definition 5 with Π ⊂ PWC ( R + × R n , Σ) . W e make the follo wing assumption for ( 18 ). Assumption 4. The solution of ( 18 ) e xists and satisfies Assumption 2 . In addition, ther e is a non-zer o dwell-time for the FTS mode F ∈ Σ , i.e., | T F k | = t F k +1 − t F k ≥ t d for all k ∈ N , wher e t d > 0 is a positive constant. Note that in the absence of discrete jumps, Assumption 3 results into | ¯ T F k | = | T F k | = t F k +1 − t F k ≥ t d for k ∈ N . Hence, Assumption 4 is a special case of Assumption 3 . W e present the conditions for FTS of the origin of ( 18 ) in terms of multiple L yapunov functions. Let { i 0 , i 1 , . . . , i p , . . . } be the sequence of modes that are active during the inter- vals [ t 0 , t 1 ) , [ t 1 , t 2 ) , . . . , [ t p , t p +1 ) , . . . , respectiv ely , for i p ∈ Σ , p ∈ Z + . Corollary 2. The origin of ( 18 ) is LS if ther e exist a switching signal σ and L yapunov functions V i for each i ∈ Σ , and the following hold: (i) Ther e exists α 1 ∈ G K , such that p X k =0 V i k +1 ( x ( t k +1 )) − V i k ( x ( t k +1 )) ≤ α 1 ( k x 0 k ) , (19) holds for all p ∈ Z + ; (ii) Ther e exists α 2 ∈ G K , such that p X k =0 V i k ( x ( t k +1 )) − V i k ( x ( t k )) ≤ α 2 ( k x 0 k ) , (20) holds for all p ∈ Z + . If in addition, (iii) Ther e exist a mode F ∈ Σ , constants c > 0 and 0 < β < 1 such that the corr esponding Lyapuno v function V F satisfies ˙ V F ≤ − cV β F , (21) for all t ∈ [ t F i , t F i +1 ) , i ∈ N ; (iv) The mode F is active for a cumulative duration T F defined as T F = γ ( k x 0 k ) , α ( k x k ) 1 − β c (1 − β ) + ¯ α ( k x k ) 1 − β c (1 − β ) , wher e α = α 0 + α 1 + α 2 , ¯ α = α 1 + α 2 and α 0 ∈ G K , then the origin of ( 18 ) is FTS with r espect to σ . Mor eover , if all the conditions hold globally and the functions V i ar e r adially unbounded for all i ∈ Σ , and the functions α 1 , α 2 ∈ G K ∞ , then the origin of ( 18 ) is globally FTS. B. F inite-T ime Stabilizing Switc hing Signal In this subsection, we present a method of designing a switching signal, based upon Corollary 2 , so that the origin of the switched system is FTS. The approach is inspired from [ 13 ] where a method of designing an asymptotically stabilizing switching signal is presented. Suppose there exist continuous functions µ ij : R n → R satisfying: µ ij (0) = 0 , µ ii ( x ) = 0 ∀ x, µ ij ( x ) + µ j k ( x ) ≤ min { 0 , µ ik ( x ) } , ∀ x (22) for all i, j, k ∈ Σ . Define the follo wing sets: Ω i = { x | V i ( x ) − V j ( x ) + µ ij ( x ) ≤ 0 , j ∈ Σ } , Ω ij = { x | V i ( x ) − V j ( x ) + µ ij ( x ) = 0 , i 6 = j } , (23) where V i is a L yapunov function for each i ∈ Σ . Now we are ready to define the switching signal. Let σ ( t 0 , x ( t 0 )) = i and i, j ∈ Σ be any arbitrary modes. For all times t ≥ t 0 , define the switching signal as: σ ( t, x ) = i, σ ( t − , x ( t − )) = i, x ( t − ) ∈ int (Ω i ); j, σ ( t − , x ( t − )) = F , x ( t − ) ∈ Ω F j , ∆ t ≥ t d ; j, σ ( t − , x ( t − )) = i, i 6 = F , x ( t − ) ∈ Ω ij ; F , σ ( t − , x ( t − )) = i, x ( t − ) ∈ Ω iF ; (24) where - ∆ t = t − t k is the time duration from the last switching instant t k ; - t d > 0 is some positiv e dwell-time; Note that the condition for switching from mode F to mode j includes a dwell-time of t d , so that Assumption 4 is satisfied. W e no w state the following result. Theorem 3. Let the switching signal for ( 18 ) is given by ( 24 ) . Let V i ar e Lyapunov functions for i = 1 , 2 , . . . , N , and µ ij satisfy ( 22 ) . Assume that the following hold: (i) Ther e exists continuous functions β ij : R n → R for i, j ∈ Σ suc h that β ij ( x ) ≤ 0 for all x ∈ R n and ∂ V i ∂ x f i ( x ) + N f X j =1 β ij ( x )( V i ( x ) − V j ( x ) + µ ij ( x )) ≤ 0 , (25) holds for all i ∈ Σ , for all x ∈ R n ; (ii) Ther e exists a finite-time stable mode F ∈ Σ satisfying condition (iii) and (iv) of Cor ollary 2 ; (iii) The functions µ ij ar e continuously differ entiable and satisfy ∂ µ ij ∂ x f i ≤ 0 , i, j = 1 , 2 , . . . , N . (26) (iv) No sliding mode occurs at any switching surface . Then, the origin of ( 18 ) is FTS. Pr oof: W e show that all the conditions of Corollary 2 and Assumption 4 are satisfied to establish FTS of the origin for ( 18 ), when the switching signal is defined as per ( 24 ). As 9 per the analysis in [ 13 , Theorem 3.18], we obtain that the conditions (i)-(ii) of Corollary 2 are satisfied with α 1 ( r ) = max k x k≤ r, i,j ∈ Σ f | µ ij ( x ) | , (27) α 2 ( r ) = 0 , (28) for any r ≥ 0 . From (ii), we obtain that conditions (iii) and (iv) of Corollary 2 hold as well. Per ( 24 ), Assumption 4 is also satisfied. Thus, all the conditions of the Corollary 2 and Assumption 4 are satisfied. Hence, we obtain that the origin of ( 18 ) with switching signal defined as per ( 24 ) is FTS. Remark 5. Note that an arbitrary switching signal σ may not satisfy the conditions of Cor ollary 2 , particularly condition (v), where the mode F is r equired to be active for T F ( x 0 ) time duration. F or any given initial condition x 0 , the switching signal can be defined as per ( 24 ) to render the origin of ( 18 ) FTS. Definition 5 allows us to choose the switching signal σ as per ( 24 ) so that the switched system ( 18 ) satisfies the conditions of Cor ollary 2 . Moreo ver , one can verify that the only differ ence between the switching signal defined in [ 13 ] and ( 24 ) is the introduction of dwell-time t d when switching fr om mode F . This observation r e-emphasizes on the fact a system whose origin is uniformly stable can be made FTS by ensuring that the dwell-time condition and the cumulative activation time r equir ements ar e satisfied for an FTS mode. A note on construction of functions µ ij , V i : For a class of switched systems consisting of N − 1 linear modes and one FTS mode F , one can follow a design procedure similar to [ 13 , Remark 3.21] to construct the functions µ ij , as well as the L yapunov functions V i , for all i 6 = F . The design procedure includes choosing quadratic functions µ ij = x T P ij x and V i = x T R i x with R i as positi ve definite matrices, and using the conditions ( 22 ) and ( 26 ) along with the conditions of Corollary 2 , to formulate a linear matrix inequality (LMI) based optimization problem. For system consisting of polyno- mial dynamics f i , one can formulate a sum-of-square (SOS) problem to find polynomial functions V i , µ ij and β ij by posing ( 22 ), ( 25 ) and ( 26 ) inequalities as SOS constraints (see [ 42 ] for an ov erview of SOS programming and [ 43 ] for methods of solving SOS problems). The “min-switching” law as described in [ 44 ], can be defined by setting the functions µ ij = 0 , which would imply that the L yapunov functions should be non-increasing at the switching instants. Our conditions on the lines of the generalization of min-switching law , as presented in [ 13 ], ov ercome this limitation and allow the L yapunov functions to increase at the switching instants. C. FTS output-feedbac k for Switc hed Systems In this subsection, we consider a switched linear system with N modes such that only one mode is observable and controllable, and design an output-feedback to stabilize the system trajectories at the origin in a finite time. Consider the system: ˙ x = A σ ( t,x ) x + B σ ( t,x ) u, y = C σ ( t,x ) x, (29) where x ∈ R n , u ∈ R , y ∈ R are the system states, and input and output of the system, respectiv ely , with A i ∈ R n × n , B i ∈ R n × 1 and C i ∈ R 1 × n . The switching signal σ : R + × R n → Σ , { 1 , 2 , . . . , N } is a piecewise constant, right-continuous function. W e make the following assumption: Assumption 5. Ther e exists a mode σ 0 ∈ Σ such that ( A σ 0 , B σ 0 ) is contr ollable and ( A σ 0 , C σ 0 ) is observable. W ithout loss of generality , one can assume that the pair ( A σ 0 , C σ 0 ) is in the controllable canonical form and ( A σ 0 , C σ 0 ) is in the observable canonical form, i.e., A σ 0 = 0 n I n − 1 0 T n − 1 , B σ 0 = 0 0 0 · · · 0 1 T and C σ 0 = 1 0 0 · · · 0 0 , where I n − 1 ∈ R n − 1 × n − 1 is an identity matrix and 0 k = 0 0 · · · 0 0 T ∈ R k × 1 . The objectiv e is to design an output feedback for ( 29 ) so that the closed loop trajectories x ( · ) reach the origin in a finite time. T o this end, we first design an FTS observer , and use the estimated states ˆ x to design the control input u . The form of the observer is: ˙ ˆ x = A σ ˆ x + g σ ( C σ x − C σ ˆ x ) + B σ u. (30) Follo wing [ 45 , Theorem 10], we define the function g : R → R n as: g i ( y ) = l i sign( y ) | y | α i , i = 1 , 2 , . . . , n, (31) where l i are such that the matrix ¯ A defined as ¯ A = − ¯ l I n − 1 0 n − 1 where ¯ l = l 1 l 2 · · · l n T is Hurwitz, and the exponents α i are chosen as α i = iα − ( i − 1) for 1 < i ≤ n , where 1 − n − 1 n < α < 1 . Define the function g σ as: g σ ( y ) = g ( y ) , σ ( t ) = σ 0 ; 0 , σ ( t ) 6 = σ 0 ; (32) Let the observ ation error be e = x − ˆ x , with e i = x i − ˆ x i for i = 1 , 2 , . . . , N . Its time deriv ativ e reads: ˙ e = A σ e − g σ ( C σ e ) . (33) Next, we design a feedback u = u ( ˆ x ) so that the origin is FTS for the closed-loop trajectories of ( 29 ). Inspired from control input defined in [ 41 , Proposition 8.1], we define the control input as u ( ˆ x ) = − P n i =1 k i sign( ˆ x i ) | ˆ x i | β i , σ ( t ) = σ 0 ; 0 , σ ( t ) 6 = σ c ; , (34) where β j − 1 = β j β j +1 2 β j +1 − β j with β n +1 = 1 and 0 < β n = β < 1 , and k i are such that the polynomial s n + k n s n − 1 + · · · + k 2 s + k 1 is Hurwitz. W e no w state the follo wing result. Theorem 4. Let the switching signal σ for ( 29 ) be given by ( 24 ) with F = σ 0 . Assume that there exist functions µ ij as defined in ( 22 ) , and that the conditions (i)-(iii) of Theorem 3 ar e satisfied. Then, the origin of the closed-loop system ( 29 ) under the effect of contr ol input ( 34 ) is an FTS equilibrium. Pr oof: W e first show that there exists T 1 < ∞ such that for all t ≥ T 1 , ˆ x ( t ) = x ( t ) . Note that the origin is the only equilibrium of ( 33 ). From the analysis in Theorem 3 , we know 10 that the conditions (i) and (ii) of Corollary 2 are satisfied. The observation-error dynamics for mode σ 0 reads: ˙ e = e 2 − l 1 sign ( e 1 ) | e 1 | α 1 e 3 − l 2 sign ( e 1 ) | e 1 | α 2 . . . e n − l n − 1 sign ( e 1 ) | e 1 | α n − 1 − l n sign ( e 1 ) | e 1 | α n . (35) Now , using [ 45 , Theorem 10], we obtain that the origin is an FTS equilibrium for ( 35 ), i.e., for mode σ 0 of ( 33 ). From [ 45 , Lemma 8], we also know that ( 35 ) is homogeneous with degree of homogeneity d = α − 1 < 0 . Hence, using [ 41 , Theorem 7.2], we obtain that there exists a L yapunov function V o satisfying ˙ V o ≤ − cV β o where c > 0 and 0 < β < 1 . Hence, condition (iii) of Corollary 2 is also satisfied. From the proof of Theorem 3 , we obtain that the condition (iv) of Corollary 2 and Assumption 4 are also satisfied. Hence, we obtain that the origin of ( 33 ) is an FTS equilibrium. Thus, there exists T 1 < ∞ such that for all t ≥ T , ˆ x ( t ) = x ( t ) . So, for t ≥ T 1 , the control input satisfies u = u ( ˆ x ) = u ( x ) . Again, it is easy to verify that the origin is the only equilibrium for ( 29 ) under the effect of control input ( 34 ). The closed-loop trajectories take the follo wing form for the mode σ = σ 0 ˙ x = x 2 x 3 . . . x n − 1 x n − P n i =1 k i sign ( x i ) | x i | β i . (36) From [ 41 , Proposition 8.1], we know that the origin of the closed-loop trajectories for mode σ = σ 0 is FTS. Hence, repeating same set of arguments as above, we obtain that there exists T 2 < ∞ such that for all t ≥ T 1 + T 2 , the closed-loop trajectories of ( 29 ) satisfy x ( t ) = 0 . W e presented a way of designing switching signal σ and control input u for a class of switched linear system where only of the modes is controllable and observable. I V . S I M U L A T I O N S W e present two numerical examples to demonstrate the efficac y of the proposed methods. The first example considers an instance of the hybrid system ( 3 ) with fiv e modes, where one mode is FTS, one is AS, and three are unstable. W e demonstrate that if the conditions of Theorem 2 are satisfied, then the trajectories of the considered system reach the origin in finite time e ven in the presence of unstable modes. The second example considers a switched linear control system with fiv e modes such that only one mode is both controllable and observable. W e design an FTS output controller for the considered switched system, and demonstrate that the closed- loop trajectories reach the origin despite presence of unob- servable modes, and that some of the uncontrollable modes are unstable. Note that the simulation results ha ve been obtained by discretizing the continuous-time dynamics using Euler dis- cretization. W e use a step size of dt = 10 − 3 , and run the simulations till the norm of the states drops belo w 10 − 10 . At this point we wish to emphasize that while the theoretical results hold for the continuous-time dynamics, and not for the implemented discretized dynamics, still the simulations reflect stable behavior that meets the theoretical bounds on the sufficiently long activ e time of the finite-time stable mode. In other words, we include the simulations for the sake of visualizing the theoretical results despite the discrepancy between continuous and discretized dynamics. The study of discretization methods for finite-time stable systems is left open for future in vestigation. A. Example 1: Analysis of a finite-time-stable hybrid system W e present a numerical example to illustrate the FTS results on a hybrid system giv en as H = {F , G , C, D } , F = { f 1 , f 2 , f 3 , f 4 , f 5 } , G = g 1 , f 1 = 0 . 01 x 2 1 + x 2 − 0 . 01 x 3 1 + x 2 , f 2 = 0 . 01 x 1 − x 2 − x 2 1 + 0 . 01 x 2 , f 3 = − x 1 − x 2 x 1 − x 2 , f 4 = 0 . 01 x 2 1 + 0 . 01 x 1 x 2 − 0 . 01 x 3 1 + x 2 2 , f 5 = x 2 − 20 sign ( x 1 ) | x 1 | α − 10 sign ( x 1 ) | x 1 | 2 − 2 α , g 1 = − 1 . 1 x 1 − 1 . 1 x 2 , C = R 2 , D = R 2 , (37) with α = 0 . 98 , where the fifth mode is FTS, and thus F = 5 . Note that the states x 1 and x 2 change sign and increase in magnitude at the discrete jumps. The L yapunov functions are defined as V i ( x ) = x T P i x , for i ∈ { 1 , 2 , 3 , 4 } , with P 1 = 1 0 0 1 , P 2 = 5 2 2 4 , P 3 = 1 0 0 3 , P 4 = 6 1 1 3 , and V 5 ( x ) = k 2 2 α | x 1 | 2 α + 1 2 | x 2 | 2 . Note that this example is more general than the examples considered in [ 25 ], as we allow the dynamics to have unstable modes. In this e xample, the switches in the continuous flo ws occur after 0 . 2 sec, i.e., | T i k | = 0 . 2 sec, and discrete jumps occur after 0 . 1 sec, so that t d = 0 . 1 sec, i.e., | ¯ T i k | = 0 . 1 , for all i ∈ { 1 , 2 , . . . , 5 } , k ∈ Z + (see Assumption 3 ). 0 20 40 60 80 0 1 2 3 4 5 6 Fig. 3. Switching signal σ f ( t ) for the considered hybrid system ( 37 ). Figure 3 depicts the considered switching signal σ f ( t ) . The switching signal is designed per Section III-B so that condi- tions (i) and (ii) are met; the switching signal in this example 11 is designed using this method, but the details are omitted in the interest of space. Briefly , the L yapunov candidates V i satisfy conditions (i) and (iii) of Theorem 2 since they are quadratic. Modes 1, 3 and 5, being stable, satisfy condition (ii) with α 2 = 0 , and modes 2 and 4, being activ e for a finite interval each time, satisfy condition (ii) with α 2 = k k x 0 k 2 for some k > 0 . It can be v erified that f 5 is homogeneous with de gree of homogeneity d = α − 1 < 0 . Thus, using [ 41 , Theorem 7.2], the origin is FTS under the system dynamics f 5 , and there exists a V 5 satisfying ( 10 ); therefore, condition (iv) is satisfied. Finally , the switching signal is designed so that mode 5 is activ e for a sufficient amount of time that satisfies condition (v). 0 10 20 30 40 50 60 70 80 -6 -4 -2 0 2 4 6 8 20 25 30 -0.2 -0.1 0 0.1 0.2 Fig. 4. The evolution of x 1 ( t ) and x 2 ( t ) for hybrid system ( 37 ). The states can be seen switching signs during discrete jumps. Figure 4 illustrates the state trajectories x 1 ( t ) and x 2 ( t ) . Note that the states change sign at the discrete jumps. Figure 5 depicts the norm of the state vector x ( t ) on log scale; note that k x ( t ) k is increasing while operating in unstable modes, and decreasing while operating in stable modes. As seen in the figures, the system states, starting from k x (0) k = 10 , reach to a norm of k x ( t ) k ≤ 10 − 10 within first 90 seconds of the simulation. Finally , Figure 6 illustrates the ev olution of the L yapunov functions V i with respect to time; note that the L yapunov functions increase, as expected, at the times of the switches in σ f and σ g , as well as during the continuous flows along the unstable modes 1, 2 and 4. The provided example demonstrates that the origin of the system is FTS e ven when one or more modes are unstable, if the FTS mode is active for a suf ficient amount of time. B. Example 2: FTS output-feedbac k for switched linear system In this second example, we consider linear switched system of the form ( 29 ) and design an output feedback that stabilizes the origin for the closed-loop system in a finite time. For illustration purposes, we consider a system of order n = 2 , σ ∈ { 1 , 2 , 3 , 4 , 5 } , and assume that mode σ = 5 , σ 0 is controllable and observable, i.e., that the pair ( A σ 0 , B σ 0 ) is controllable and ( A σ 0 , C σ 0 ) is observable, while other modes are either uncontrollable or unobservable, or both. The simulation parameters are: 0 20 40 60 80 10 -10 10 -5 10 0 Fig. 5. The ev olution of k x ( t ) k for ( 37 ). The norm of the states reach a small neighborhood of the origin within a finite time. 0 20 40 60 80 100 0 20 40 60 80 100 120 140 20 25 30 0 0.05 0.1 0.15 Fig. 6. The evolution of the L yapunov functions V i ( t ) for t ∈ [0 , 10] sec for ( 37 ). The Lyapuno v functions for unstable modes (mode 2 and 4) increase when the respectiv e modes are active. • Number of modes N = 5 , FTS mode F = 5 , t d = 0 . 1 , α = 0 . 9 , a 1 = − 10 , a 2 = 10 , β = . 9 k 1 = 20 and k 2 = 10 ; • The matrices A i , B i , C i are chosen as A 1 = 0 1 − 1 0 , A 2 = 0 . 1 0 0 0 . 1 , A 3 = − 1 0 0 − 1 . 2 , A 4 = 1 0 . 1 0 . 1 2 , A 5 = 0 1 0 0 , B 1 = B 2 = B 3 = B 4 = 0 0 , B 5 = 0 1 and C 1 = C 2 = C 3 = C 4 = 0 0 , C 5 = 1 0 . • Generalized L yapunov functions are chosen as V i ( x ) = x T P i x where matrices P i are chosen as P 1 = 1 0 0 1 , P 2 = 5 2 2 4 , P 3 = 1 0 0 3 , P 4 = 6 1 2 3 , and V 5 ( x ) = k 2 2 α | x 1 | 2 α + 1 2 | x 2 | 2 ; • Functions µ ij as µ ij ( x ) = −k x k 2 , i ∈ { 1 , 2 , 4 } ; 0 , i ∈ { 3 , 5 } ; for all j ∈ σ . 12 Note that open-loop mode 1 is L yapunov stable, mode 3 is asymptotically stable, and modes 2, 4 and 5 are unstable. The generalized L yapunov candidates V i , being quadratic, satisfy condition (i) of Corollary 2 . Modes 1, 3 and 5, being stable, satisfy condition (ii) with α 2 = 0 , and modes 2 and 4, being activ e only for a finite time, satisfy condition (ii) with α 2 = k k x 0 k 2 for some k > 0 . Conditions (iv) and (v) are satisfied by carefully designing the switching signal, as discussed in Section III-B . 0 5 10 15 20 25 30 35 -60 -40 -20 0 20 22 24 26 28 30 -2 0 2 4 10 -3 Fig. 7. Closed-loop system states x 1 ( t ) , x 2 ( t ) with time for linear switched system. Figure 7 illustrates the state trajectories x 1 ( t ) , x 2 ( t ) of the closed-loop system o ver time for randomly chosen initial conditions, and Figure 8 depicts the norm of the states k x ( t ) k . Figure 9 plots the norm of the state-estimation error , k x − ˆ x k with time. It can be seen from the these figures that both the norms k x k and k x − ˆ x k go to zero in finite time. 0 5 10 15 20 25 30 35 10 -10 10 -5 10 0 Fig. 8. The norm of the state vector x ( t ) for the closed-loop trajectories of linear switched system with time. Figure 10 sho ws the ev olution of L yapunov functions V i ( x − ˆ x ) for the FTS observer of the linear switched system. It can be seen that there are unstable modes in the observer , where the value of the functions increase when the respecti ve modes are activ e (e.g., mode 2 and 4). Finally , Figure 11 plots the switching signal σ with time. The switching signal is designed 5 10 15 20 25 30 35 10 -10 10 -5 10 0 Fig. 9. The norm of the state-estimation error x ( t ) − ˆ x ( t ) for the linear switched system with time. as per the design procedure listed in Section III-B . It can be seen that all the fi ve modes (including the unstable modes) get activ ated for the switched linear system, while FTS of the origin is still ensured. 0 5 10 15 20 25 30 35 0 1000 2000 3000 4000 5000 6000 7000 10 15 20 0 10 20 Fig. 10. The ev olution of the L yapunov functions V i ( t ) for the FTS observer of the linear switched system. 0 5 10 15 20 25 30 35 0 1 2 3 4 5 6 Fig. 11. Switching signal for the linear switched system. 13 The provided examples validate that the system can achieve FTS ev en when one or more modes are unstable, if the FTS mode is activ e for long enough. V . C O N C L U S I O N S A N D F U T U R E W O R K In this paper, we studied FTS of a class of switched and hybrid systems. W e sho wed that under some mild conditions on the bounds on the difference of the values of L yapunov functions, if the FTS mode is activ e for a suf ficient cumulativ e time, then the origin of the hybrid system is FTS. Our proposed method allows the indi vidual L yapunov functions to increase both during the continuous flows as well as at the discrete state jumps, i.e., it allows the hybrid system to have unstable modes. W e also presented a method of designing a finite- time stabilizing switching signal. As an application of the theoretical results, we designed an FTS output feedback for a class of linear switched systems in which only one of the modes is both controllable and observ able. Control inputs that satisfy the multiple-L yapunov-function conditions are typically obtained via optimization-based tech- niques, for example linear matrix inequalities (LMIs) for linear switched systems, or sum-of-squares (SOS) for switched systems of polynomial dynamics. In addition, state and time constraints can be further imposed to the underlying opti- mization problems to capture spatiotemporal specifications. Our ongoing research focuses on incorporating input and state constraints in the hybrid systems framew ork to model safety (in the sense of in variance of a safe set of states) and temporal requirements (in the sense of con vergence to a set or to a point within an arbitrarily chosen time, if possible). More specifically , we are in vestigating how to impose con vergence of the system trajectories in a prescribed time that can be a priori selected by the user , rather than merely in finite time (which depends on the initial conditions, and hence can not be in general chosen arbitrarily), so that the overall framework can be used for the synthesis and analysis of controllers for spatiotemporal specifications. R E F E R E N C E S [1] P . J. Antsaklis and A. Nerode, “Hybrid control systems: An introduc- tory discussion to the special issue, ” IEEE Tr ansactions on Automatic Contr ol , vol. 43, no. 4, pp. 457–460, 1998. [2] J. Zhao and M. W . Spong, “Hybrid control for global stabilization of the cart–pendulum system, ” A utomatica , vol. 37, no. 12, pp. 1941–1951, 2001. [3] H. Ishii and B. Francis, “Stabilizing a linear system by switching control with dwell time, ” IEEE T ransactions on Automatic Contr ol , vol. 47, no. 12, pp. 1962–1973, 2002. [4] K. S. Narendra, O. A. Driollet, M. Feiler , and K. George, “ Adaptiv e control using multiple models, switching and tuning, ” International Journal of Adaptive Contr ol and Signal Processing , vol. 17, no. 2, pp. 87–102, 2003. [5] A. V . Savkin, E. Skafidas, and R. J. Evans, “Rob ust output feedback stabilizability via controller switching, ” Automatica , vol. 35, no. 1, pp. 69–74, 1999. [6] D. Liberzon, Switching in systems and control . Springer Science & Business Media, 2003. [7] J. Lygeros, “Lecture notes on hybrid systems, ” in Notes for an ENSIETA workshop . Citeseer , 2004. [8] R. Goebel, R. G. Sanfelice, and A. R. T eel, Hybrid Dynamical Systems: modeling, stability , and rob ustness . Princeton University Press, 2012. [9] H. Lin and P . J. Antsaklis, “Stability and stabilizability of switched linear systems: a survey of recent results, ” IEEE Tr ansactions on Automatic contr ol , vol. 54, no. 2, pp. 308–322, 2009. [10] G. Da vrazos and N. K oussoulas, “ A re view of stability results for switched and hybrid systems, ” in Pr oceedings of 9th Mediterranean Confer ence on Contr ol and Automation . Citeseer, 2001. [11] R. Shorten, F . W irth, O. Mason, K. W ulff, and C. King, “Stability criteria for switched and hybrid systems, ” SIAM re view , vol. 49, no. 4, pp. 545– 592, 2007. [12] M. S. Branicky , “Multiple lyapunov functions and other analysis tools for switched and hybrid systems, ” IEEE T ransactions on Automatic Contr ol , vol. 43, no. 4, pp. 475–482, 1998. [13] J. Zhao and D. J. Hill, “On stability , l2-gain and h- ∞ control for switched systems, ” Automatica , vol. 44, no. 5, pp. 1220–1232, 2008. [14] X. Zhao, L. Zhang, P . Shi, and M. Liu, “Stability of switched positive linear systems with av erage dwell time switching, ” Automatica , vol. 48, no. 6, pp. 1132–1137, 2012. [15] X. Zhao, P . Shi, Y . Y in, and S. K. Nguang, “Ne w results on stability of slowly switched systems: a multiple discontinuous lyapunov function approach, ” IEEE T ransactions on Automatic Contr ol , vol. 62, no. 7, pp. 3502–3509, 2017. [16] A. R. T eel, A. Subbaraman, and A. Sferlazza, “Stability analysis for stochastic hybrid systems: A survey , ” Automatica , vol. 50, no. 10, pp. 2435–2456, 2014. [17] J. Liu and A. R. T eel, “L yapunov-based sufficient conditions for stability of hybrid systems with memory , ” IEEE T ransactions on Automatic Contr ol , vol. 61, no. 4, pp. 1057–1062, 2016. [18] R. K. Goebel and R. G. Sanfelice, “Notions and sufficient conditions for pointwise asymptotic stability in hybrid systems, ” IF AC-P apersOnLine , vol. 49, no. 18, pp. 140–145, 2016. [19] A. R. T eel, F . Forni, and L. Zaccarian, “Lyapuno v-based sufficient con- ditions for exponential stability in hybrid systems, ” IEEE Tr ansactions on Automatic Contr ol , vol. 58, no. 6, pp. 1591–1596, 2013. [20] E. Ryan, “Finite-time stabilization of uncertain nonlinear planar sys- tems, ” in Mechanics and control . Springer , 1991, pp. 406–414. [21] S. P . Bhat and D. S. Bernstein, “Finite-time stability of continuous autonomous systems, ” Journal on Contr ol and Optimization , vol. 38, no. 3, pp. 751–766, 2000. [22] X. Liu, D. W . Ho, Q. Song, and J. Cao, “Finite-/fixed-time robust stabilization of switched discontinuous systems with disturbances, ” Nonlinear Dynamics , vol. 90, no. 3, pp. 2057–2068, 2017. [23] Y . Li and R. G. Sanfelice, “ A rob ust finite-time conver gent hybrid observer for linear systems, ” in 52nd IEEE Conference on Decision and Contr ol , Dec 2013, pp. 3349–3354. [24] S. G. Nersesov and W . M. Haddad, “Finite-time stabilization of non- linear impulsive dynamical systems, ” in European Control Confer ence . IEEE, 2007, pp. 91–98. [25] Y . Li and R. G. Sanfelice, “Finite time stability of sets for hybrid dynamical systems, ” Automatica , vol. 100, pp. 200–211, 2019. [26] H. R ´ ıos, J. Davila, and L. Fridman, “State estimation on switching systems via high-order sliding modes, ” in Hybrid Dynamical Systems . Springer , 2015, pp. 151–178. [27] Y . Orlov , “Finite time stability and robust control synthesis of uncertain switched systems, ” SIAM Journal on Contr ol and Optimization , vol. 43, no. 4, pp. 1253–1271, 2004. [28] B. Zhang, “On finite-time stability of switched systems with hybrid homogeneous degrees, ” Mathematical Pr oblems in Engineering , vol. 2018, 2018. [29] J. Fu, R. Ma, and T . Chai, “Global finite-time stabilization of a class of switched nonlinear systems with the powers of positiv e odd rational numbers, ” Automatica , vol. 54, pp. 360–373, 2015. [30] Y . Li and R. G. Sanfelice, “Results on finite time stability for a class of hybrid systems, ” in 2016 American Contr ol Conference (ACC) , July 2016, pp. 4263–4268. [31] F . Bejarano, A. Pisano, and E. Usai, “Finite-time conver ging jump observer for switched linear systems with unknown inputs, ” Nonlinear Analysis: Hybrid Systems , vol. 5, no. 2, pp. 174–188, 2011. [32] F . Amato, R. Ambrosino, M. Ariola, C. Cosentino, and G. D. T ommasi, “Finite-time stabilization of impulsiv e dynamical linear systems, ” in 2008 47th IEEE Conference on Decision and Contr ol , Dec 2008, pp. 2782–2787. [33] E. Bonotto, M. Bortolan, T . Caraballo, and R. Collegari, “ A survey on impulsiv e dynamical systems, ” Electr onic Journal of Qualitative Theory of Differ ential Equations , vol. 2016, no. 7, pp. 1–27, 2016. [34] F . Amato, G. De T ommasi, and A. Pironti, “Necessary and sufficient conditions for finite-time stability of impulsiv e dynamical linear sys- tems, ” Automatica , vol. 49, no. 8, pp. 2546–2550, 2013. [35] B. Zhang, “On finite-time stability of switched systems with hybrid homogeneous degrees, ” Mathematical Problems in Engineering , 2018, 14 in press. [Online]. A vailable: https://www .hindawi.com/journals/mpe/ aip/3096986/ [36] X.-M. Sun and W . W ang, “Integral input-to-state stability for hybrid de- layed systems with unstable continuous dynamics, ” Automatica , vol. 48, no. 9, pp. 2359–2364, 2012. [37] R. G. Sanfelice, R. Goebel, and A. R. T eel, “Inv ariance principles for hybrid systems with connections to detectability and asymptotic stability , ” IEEE T ransactions on Automatic Contr ol , vol. 52, no. 12, pp. 2282–2297, 2007. [38] P . Peleties and R. DeCarlo, “ Asymptotic stability of m-switched systems using lyapunov-like functions, ” in 1991 American Contr ol Conference , June 1991, pp. 1679–1684. [39] Y .-E. W ang, H. R. Karimi, and D. Wu, “Conditions for the stability of switched systems containing unstable subsystems, ” IEEE T ransactions on Circuits and Systems II: Express Briefs , 2018. [40] C. Cai, A. R. T eel, and R. Goebel, “Smooth lyapunov functions for hybrid systems part ii:(pre) asymptotically stable compact sets, ” IEEE T ransactions on Automatic Contr ol , vol. 53, no. 3, pp. 734–748, 2008. [41] S. P . Bhat and D. S. Bernstein, “Geometric homogeneity with appli- cations to finite-time stability , ” Mathematics of Control, Signals, and Systems , vol. 17, no. 2, pp. 101–127, 2005. [42] P . A. Parrilo, “Structured semidefinite programs and semialgebraic geometry methods in robustness and optimization, ” Ph.D. dissertation, California Institute of T echnology , 2000, phD Thesis. [43] S. Prajna, A. Papachristodoulou, and P . A. Parrilo, “Introducing sostools: a general purpose sum of squares programming solver , ” in Proceedings of the 41st IEEE Conference on Decision and Control, 2002. , vol. 1, Dec 2002, pp. 741–746 vol.1. [44] D. Liberzon and A. S. Morse, “Basic problems in stability and design of switched systems, ” IEEE Contr ol Systems Magazine , vol. 19, no. 5, pp. 59–70, 1999. [45] W . Perruquetti, T . Floquet, and E. Moulay , “Finite-time observers: application to secure communication, ” IEEE Tr ansactions on Automatic Contr ol , vol. 53, no. 1, pp. 356–360, 2008. [46] Z. Zuo and L. Tie, “Distributed robust finite-time nonlinear consensus protocols for multi-agent systems, ” International Journal of Systems Science , vol. 47, no. 6, pp. 1366–1375, 2016. [47] H. K. Khalil, “Noninear systems, ” Pr entice-Hall, New J ersey , v ol. 2, no. 5, pp. 5–1, 1996. A P P E N D I X A P RO O F O F L E M M A 1 Pr oof: Lemma 3.3, 3.4 of [ 46 ] establish the follo wing set of inequalities for z i ≥ 0 and 0 < r ≤ 1 M X i =1 z i ! r ≤ M X i =1 z r i ≤ M 1 − r M X i =1 z i ! r . (38) Hence, we hav e that for a ≥ b ≥ 0 and 0 < r ≤ 1 , a r = ( b + ( a − b )) r ≤ b r + ( a − b ) r , or equiv alently , a r − b r ≤ ( a − b ) r . (39) Hence, we hav e that for any 0 < r ≤ 1 , k X i =1 ( a r i − b r i ) ≤ X i ∈ I 1 ( a r i − b r i ) ≤ X i ∈ I 1 ( a i − b i ) r . A P P E N D I X B P RO O F O F C O RO L L A RY 1 Pr oof: Since the origin is uniformly stable, we know that there e xist α 4 ∈ G K and a constant c > 0 such that k x ( t ) k ≤ α 4 ( k x 0 k ) , (40) for all t ≥ 0 and all k x 0 k < c ([ 47 , Lemma 4.5]). Now , since the function V F is positi ve definite, we know that there exists α 5 ∈ G K such that ([ 47 , Lemma 4.3]) V ( x ( t )) ≤ α 5 ( k x ( t ) k ) ( 40 ) ≤ α 5 ( α 4 ( k x 0 k )) = α ( k x 0 k ) , where α = α 5 ◦ α 4 ∈ G K . Using this, we obtain that ¯ T F = M X k =1 | ¯ T F k | ≤ M X k =1 ¯ V 1 − β F k c ((1 − β ) − ¯ V 1 − β F k +1 c (1 − β ) ≤ M X k =1 ¯ V 1 − β F k c ((1 − β ) ≤ M X k =1 α ( k x 0 k ) 1 − β c ((1 − β ) . Define ¯ γ = M P k =1 α 1 − β c ((1 − β ) ∈ G K to be complete the proof.
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment