Stabilizing Scheduling Policies for Networked Control Systems
This paper deals with the problem of allocating communication resources for Networked Control Systems (NCSs). We consider an NCS consisting of a set of discrete-time LTI plants whose stabilizing feedback loops are closed through a shared communicatio…
Authors: Atreyee Kundu, Daniel E. Quevedo
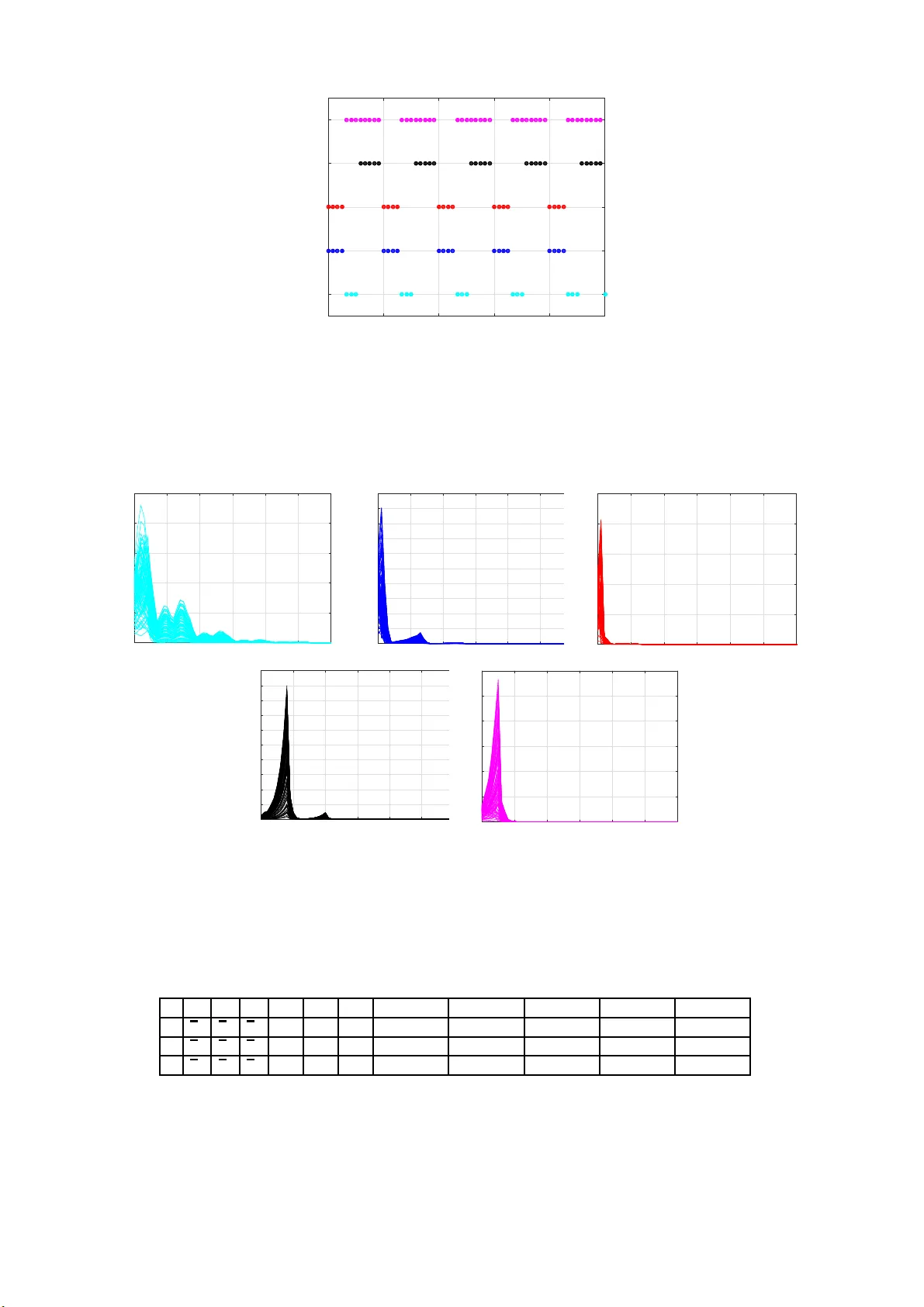
ST ABILIZING SCHEDULING POLICIES FOR NET WORKED CONTR OL SYSTEM S A TREYEE KUNDU AND D ANIEL E. Q UEVEDO A bstract . This paper deals with the problem of allocat ing communicat ion resources for Network ed Control Systems (NCSs). W e consider an NCS c onsisting of a set of discrete-time L TI plants whose sta bilizi ng feedback loops are closed through a shared com- municati on c hannel . Due to a limited communicatio n ca pacit y of the channel, no t all plants can exchange information with th eir control lers at an y inst ant of time. W e propose a method to find periodic scheduling policies under which global asymptotic stability of each plant in the NCS is preserv ed. The indiv idual plants are represented as switched systems, and the NCS is ex pressed as a weighted direct ed graph. W e con struct stabiliz ing schedulin g policies by emplo ying cycle s on the underlying weighte d direct ed graph of the NCS that satisfy appropriate contract i vity condit ions. W e also discuss algorithmi c design of these cycl es. 1. I ntroduc tion Networked Control Sy stem s ( NCSs) are om nipresent in moder n day Cy b er-Physical Systems (CPS) and In ternet of Thin gs (IoT) ap plications. While t hese ap plications typ ica lly in volve a large-scale setting, the network r esources are o ften limited. Consequently , multiple plants may need to share a communicatio n ch annel (or network) for exchang ing information with their r emotely loc ated contr ollers. Examples of comm unication networks with limited b andwidth inclu de wireless networks (an im portan t c o mpon ent of smar t hom e, smar t transp ortation, smart city , remo te surgery , pla to ons of auton omous vehicles, etc.) and un derwater acoustic commun ication systems. The often enc o untered scenario wherein the number of plants sharing a commu n ication cha n nel is higher than the capacity of the channel is c a lled medium access constraint . In this paper we consider an NCS consisting of multiple discrete-time linear plants whose f eedback loops are closed throug h a shared communicatio n ch a nnel. A bloc k dia g ram of such an NCS is shown in Figure 1. W e assume that the p lants Controller 1 Plant 1 Controller 2 Plant 2 Controller N Plant N Communication channel . . . F igure 1. Block diagr am o f NCS are unstable in open -loop and a sy mptotically stable in closed-loop . Due to a limited co mmunica tio n capacity of the chann el, only a few plants can exchange inform ation with the ir contro llers at any instant of time. Consequently , th e rem aining plants operate in open-lo op at every time in stant. Our ob jectiv e is to allocate the shared comm unication chann el to the set of plants in a manner so that stability of all plants is preserved . This task of e ffi cient allocation of commu nication resour ces is common ly referred to as a scheduling pr oblem , and the correspondin g allocation scheme is called a scheduling policy . Scheduling policies th at preserve qualitative behaviour of an NCS un der limited commu nication and / o r computation resources are widely resear c hed upon, and tools from b oth c o ntrol theory and comm u nication th eory ha ve been explored, see the rec ent work s [1, 8, 23 , 28, 30] and the r eferences therein . These policies can be br o adly classified into two cate gories: sta tic (also called period ic , fi xed , or open -loop ) and dyn amic (also called non-p eriodic , or closed- loop ) schedu ling. In case of the Date : January 25, 2019. K e y words and phrases. networke d c ontrol systems, schedulin g po lic y , a symptotic stabili ty , dire cted graphs, switched systems. Atrey ee Kundu is wit h the Departme nt of Electric al Engineerin g, Indian Institut e of Science Bangal ore, India. Email: atre yeek@ii sc.ac.in. Daniel E. Que ved o is with the Department of Electrica l Engin eering, Paderborn Univ ersity , German y . Email: dquev edo@ieee.or g. 1 2 A. KUNDU AND D. E. Q UEVEDO former, a finite length allocation sch eme o f the shared commu nication chann el is deter mined o ffl ine and is applied eternally in a periodic manner , while in case of the latter , the allocation is d etermined based on some info rmation (e.g., states, ou tputs, access status of sen sors an d actuators, etc.) about th e p lant. I n th is pap er we will foc u s on periodic sched uling policies that pr eserve global asympto tic stab ility (GAS) of all pla n ts in an NCS. W e will call su ch schedu lin g policies as stabilizing scheduling po licies . Static schedulin g p o licies are easier to imp le m ent, often nea r op timal, an d g uarantee activ ation of each sensor and actuato r , see [12, 22, 26] for detailed d iscussions. They a re p r eferred for safety-critical control systems [22, § 2.5. 1]. It is also observed in [25, 2 6] that periodic phenomeno n a p pears in non-pe riodic sched ules. For NCSs with contin uous-time linear plan ts, stabilizing perio dic sched uling p olicies are characterize d using comm o n L yapun ov function s [9] and piecewis e L yap unov-like fun ctions with av erage dwell time switchin g [21]. A more general case of co-designing a static schedu ling policy and co ntrol action is addre ssed u sing com b inatorial optim ization with periodic control theory in [2 7] an d Lin ear Matrix Inequ alities (LMIs) o ptimization with average dwell time techniqu e in [5]. In the discrete-time setting, the authors of [31] characterize pe riodic switching sequences that ensure r eachability and observability of th e plan ts under limited commu nication, and design a n ob server-based feedback con troller for these per iodic sequen ces. The tech niques wer e later extended to the case of c o nstant tr ansmission delay s [10] a nd L inear Q u adratic Gaussian (LQG) control p roblem [ 11]. Perio dic sensor sched uling schemes that acco mmoda te limited co mmunica tio n and adversary attacks are studied recently in [29]. The main contribution of this pape r lies in combining switched s ystems and graph theory to propo se a n ew class of stabilizing schedulin g po licies for NCSs. W e represent the individual (o pen-loo p unstable) plants o f an NCS as switched systems, where the switching is between their open -loop ( u nstable mode) and closed-loop (stable mode) operation s. Clearly , within o ur setting , no switched system ca n op erate in stable mode fo r all time as that will d estabilize some of the p lants in the NCS. The search for a stabilizing sched uling po licy then b ecomes the prob lem of finding switching logics that ob ey the limitations of the sh ared channel and p reserve stability . It is assum e d tha t the exchang e of inform ation between a plant and its controller is not a ff ected by com municatio n un certainties. In the recen t p a st, graph theoretic techniqu es have played an importan t r ole in design ing stabilizing switching lo gics for switched systems, see e.g ., [15, 16] a nd the re f erences therein . In the pr e sent work we associate a weig h ted dir e cted graph with the NCS that captures the commun ication lim itation of the shared ch annel, and design stabilizing switching logics for e a c h plant in th e NCS. M ultiple L y apunov- like fu nctions are employed f or an alyzing stab ility o f th e switched systems. The stabilizing switching logics fo rm a stabilizing scheduling policy . The switching logics are comb ined in terms of a class o f cycles on the underlying weigh ted directed graph of the NCS that satisfies approp r iate con tractivity pr operties. W e also discuss algorithm ic con struction of these cycles. In brief, our contributions are: ◦ Given an N CS with d iscrete-time linear plants that e xchang e inform ation with their stabilizin g controllers thr ough a shared channel of limited communication ca p acity , we present an algorithm to d esign a schedu ling po licy that preserves GAS of each plant in the NCS. Our sche duling policy is pe r iodic in n ature, an d relies o n the existence o f what we call a T - contractive cycle on the underlying weigh ted directed gr aph of the NCS. Perio d ic schedu ling p o licies are p r oven to be immensely useful in process con trol, where many loops n e e d to share a co mmon com municatio n resou rce as it av oid s the nece ssity of f r equent ne twork r econfigu rations. In fact, p eriodic schedu ling is an inh e r ent feature o f IEEE 802. 15.4 networks [26] which und e rlie commercial standards, such as W irelessHart, ISA10 0 .11a and ZigBee. Th e use of cycles on a weighted directed graph makes our tec hniques numerically tractable, see Remark 11 for a detailed discussion. ◦ W e ad dress algo rithmic design of T -contractive cycles. Given the conne ctivity o f the und erlying weighted d irected gr aph of the NCS and descrip tion of th e in dividual p lants, w e fix a cycle o n th is gr aph a n d present an algorithm that designs multiple L yapun ov-like f unctions suc h tha t the above cycle is T -contrac tive. W e also ide n tify su ffi cien t con ditions on the multiple L yap unov-like fun ctions and chan nel constrain ts u nder which th e existence of a T -contractive cycle is guar anteed. The remain der of this paper is organiz e d as follows: in § 2 we formulate the problem under c onsideration , and describe the primary ap paratus fo r our analysis. Our method for construc ting stabilizing periodic sch eduling p olicies appears in § 3. In § 4 we discuss algo rithmic design o f T -co ntractive cycles. Nu merical examples ar e presented in § 5 to demonstrate ou r results. W e con clude in § 6 w ith a brief discussion of future research directions. A proof of our main Theorem appears in § 7. Some no tation u sed in this paper : N = { 1 , 2 , . . . } is th e set of n atural n umbers, N 0 = { 0 } ∪ N , and R is the set of real number s. W e let ] k 1 : k 2 ] denote th e set { n ∈ N | k 1 < n ≤ k 2 } . For a scalar m , let | m | deno te its ab solute value, and for a set M , let | M | d e n ote its cardinality . Let k·k be the standard 2-nor m an d ⊤ denote the transpose operation . 2. P reliminari es W e c o nsider an NCS with N discrete- time linear plants. Each p lant com municates with its remotely located co n troller throug h a shar ed communication channel, see Figure 1. Th e plant dynamics are x i ( t + 1) = A i x i ( t ) + B i u i ( t ) , x i (0) = x 0 i , i = 1 , 2 , . . . , N , t ∈ N 0 , (1) 3 where x i ( t ) ∈ R d and u i ( t ) ∈ R m are the vectors of states a nd inp uts o f th e i -th plant at time t , respectively . Ea c h p lant i employs a state-feedbac k controller gi ven by u i ( t ) = K i x i ( t ), i = 1 , 2 , . . . , N . The matrices A i ∈ R d × d , B i ∈ R d × m and K i ∈ R m × d , i = 1 , 2 , . . . , N ar e known. The shared channel h as a lim ited commu nication ca p acity: at any time instant, only M plan ts ( 0 < M < N ) can access the chann el. Consequently , N − M p lants operate in open loop at every time instant. W e define S : = { s ∈ { 1 , 2 , . . . , N } M | all elements of s are distinct } to be the set of vectors that consist o f M distinct elements from { 1 , 2 , . . . , N } . W e call a fu nction γ : N 0 → S a sch eduling policy. Th ere exists a di verging sequence o f times 0 = : τ 0 < τ 1 < τ 2 < · · · and a sequence of indices s 0 , s 1 , s 2 , . . . with s j ∈ S , j = 0 , 1 , 2 , . . . such that γ ( t ) = s j for t ∈ [ τ j : τ j + 1 [, j = 0 , 1 , 2 , . . . . T he role of γ is to specify , at e very time t , M plants of the NCS which acc ess the com munication channel at that time. The remaining N − M p lants operate in o pen loop, in particular, with u i ( t ) = 0. Remark 1. On e may also study a sched uling problem in the setting of the remaining N − M p lants opera ting with u i ( t ) = u , where u is the last control input received bef o re time t . Howev er , in this pap e r we con sider open -loop ev olution of a p lant whenever it is not accessing the shared commun ication chan nel. W e will work under the follo wing set of assumptions: Assumption 1. The o pen-loo p dyn amics of each plant is u nstable and each contro ller is stabilizing. More specifically , th e matrices A i + B i K i , i = 1 , 2 , . . . , N are Schu r stable an d the matrices A i , i = 1 , 2 , . . . , N are un stable. 1 Assumption 2. The shared com m unication channel is ideal in the sen se that exchange of in formatio n between pla n ts and their controller s is not a ff ected by commun ication unc ertainties. In view of Assumption 1, each p lant in ( 1) oper ates in two mod es: stable mode wh en the plan t has access to the shared commun ication channel and unstable m ode when the plan t does not h av e access to the ch annel. Let us deno te the stable and unstable modes of the i - th plan t as i s and i u , respectively , A i s = A i + B i K i and A i u = A i , i = 1 , 2 , . . . , N . In this pap er we are interested in a scheduling policy th at guaran tees GA S of each plant in (1). In particular, we study the following problem: Problem 1 . Gi ven the matrices A i , B i , K i , i = 1 , 2 , . . . , N , and a num b er M ( < N ), find a s chedulin g policy that ensures global asymptotic stability (GAS) of each plant i in (1). W e will call a scheduling policy γ that is a s olution to Problem 1, as a stabilizing schedulin g po licy . Recall th at Definition 1 ( [ 14, Lemm a 4.4] ) . The i -th plant in ( 1) is GAS fo r a g i ven schedu ling policy γ , if there exists a class K L function β i such that the following ineq uality holds: k x i ( t ) k ≤ β i ( k x i (0) k , t ) fo r all x i (0) ∈ R d and t ≥ 0 . 2 (2) T owards solving Problem 1, we express individual plants in (1) as switched systems and associate a weig hted directed graph with the NCS under consideration . Our solution to Problem 1 in volves two steps: ◦ first, we present an algorithm that constru c ts a sch eduling p olicy by emp loying what we ca ll a T -co ntractive c ycle o n th e underly ing w e ighted directed graph of the NCS, and ◦ secon d, we sho w that a scheduling policy obtain ed from our a lgorithm ensures GAS of each plant in (1). W e also discuss algor ithmic d esign of T - contractive cycles. In the re m ainder of this section we c a talog our analysis tools. 2.1. Individual pla nts and switched systems. The d ynamics of the i -th p lant in (1) can be expr essed as a switched system [20, § 1.1 .2] x i ( t + 1) = A σ i ( t ) x i ( t ) , x i (0) = x 0 i , σ i ( t ) ∈ { i s , i u } , t ∈ N 0 , (3) where the subsystems are { A i s , A i u } and a switching logic σ i : N 0 → { i s , i u } satisfies: σ i ( t ) = i s , if i is an elem e nt of γ ( t ) , i u , otherwise . Clearly , a switching logic σ i , i = 1 , 2 , . . . , N is a func tio n of the schedu ling po licy γ . In order to ensure GAS of th e individual plants, it th erefore, su ffi ces to lo o k for a γ that renders each σ i stabilizing in the follo wing sense: σ i guaran tee s GAS of switched system (3) for each i = 1 , 2 , . . . , N . W e recall the following facts from recent literature: 1 W e call a matrix unstable , if it is not Schur stable. 2 Recal l classes of functions [14, Chapter 4]: K : = { φ : [0 , + ∞ [ → [0 , + ∞ [ φ is continuo us, stri ctly increasin g, φ (0) = 0 } , L : = ψ : [0 , + ∞ [ − → [0 , + ∞ [ ψ is continuous and ψ ( s ) ց 0 as s ր + ∞ , K L : = χ : [0 , + ∞ [ 2 − → [0 , + ∞ [ χ ( · , s ) ∈ K for each s a nd χ ( r , · ) ∈ L for each r . 4 A. KUNDU AND D. E. Q UEVEDO Fact 1. [16, F act 1] For eac h i = 1 , 2 , . . . , N , there exist p airs ( P p , λ p ), p ∈ { i s , i u } , wh ere P p ∈ R d × d are symmetric and positive definite matrice s, and 0 < λ i s < 1, λ i u ≥ 1, such that with R d ∋ ξ 7− → V p ( ξ ) : = h P p ξ, ξ i ∈ [ 0 , + ∞ [ , (4) we have V p ( z p ( t + 1)) ≤ λ p V p ( z p ( t )) , t ∈ N 0 , (5) and z p ( · ) solves the p -th recursion in (3), p ∈ { i s , i u } . Fact 2. [16, F a ct 2] For each i = 1 , 2 , . . . , N , there exist µ pq ≥ 1 suc h that V q ( ξ ) ≤ µ pq V p ( ξ ) fo r all ξ ∈ R d and p , q ∈ { i s , i u } . (6) The functio ns V p , p ∈ { i s , i u } , i = 1 , 2 , . . . , N a re called L yapun ov-like function s, and they are widely used in stability theory o f switched a n d h ybrid systems [4, 20]. W e will use pro perties of these functio ns described in Facts 1 an d 2, in our analysis towards d eriving a stabilizing sched uling policy . The scalar s λ p , p ∈ { i s , i u } g iv e qu antitativ e me a su res of (in)stability associated to (un)stable modes of o p eration of the i -th plant. Line a r compar ability of V p ’ s in (6) follows from the definitio n of V p , p ∈ { i s , i u } in (4). In [16, Pro position 1] a tight estimate of the scalars µ pq , p , q ∈ { i s , i u } was propo sed to be λ max ( P q P − 1 p ), where λ max ( M ) denote s the maximum eigenv alue of a matrix M ∈ R d × d . 2.2. NCS and directed graphs. Recall th at a d ir ected grap h is a set of vertices connec ted b y edges, where each edge has a direction associated to it. W e con nect a directed g raph G ( V , E ) with the NCS under consideration . G ( V , E ) contains: ◦ a vertex set V con sisting of N M vertices th at are lab elled d istinctly . The label associated to a vertex v is g iv en b y L ( v ) = { ℓ v (1) , ℓ v (2) , . . . , ℓ v ( N ) } , wher e ℓ v ( i ) = i s for any M elem ents and ℓ v ( i ) = i u for the r emaining N − M elemen ts. T wo labels L ( u ) an d L ( v ) are equal if ℓ u ( i ) = ℓ v ( i ) fo r all i = 1 , 2 , . . . , N . By th e term distinct labe lling, we mean that L ( u ) = L ( v ) whenever u = v ∈ V . ◦ an edg e set E consisting of a d irected edge ( u , v ) from e very vertex u ∈ V to e very verte x v ∈ V , v , u . The label L ( v ) correspo nding to a vertex v ∈ V g iv es a combin a tion of M plan ts operating in stable mode and th e remainin g N − M plants operating in unstab le mode. Sin c e V con tains N M vertices and the label associated to each vertex is d istinct, it follows that the set of vertex labels consists of all possible comb inations of M plants accessing the commun ication channel and N − M p lants operating in open - loop. A direc te d edge ( u , v ) fr o m a vertex u to a vertex v ( , u ) co rrespon ds to a tr ansition from a set of M plants acc essing the c ommun ication channel ( as specified by L ( u )) to ano ther set o f M plants accessing the commun ication chan nel (as specified by L ( v )). In the sequel we m a y abbr eviate G ( V , E ) as G if there is no risk o f confusion. W e use fu nctions w : V → R N and w : E → R N to associate weights to the vertices and edg e s of G , respectively . They are defined as w ( v ) = w 1 ( v ) w 2 ( v ) . . . w N ( v ) , v ∈ V , where w i ( v ) = − ln λ i s , if ℓ v ( i ) = i s , ln λ i u , if ℓ v ( i ) = i u , i = 1 , 2 , . . . , N , (7) and w ( u , v ) = w 1 ( u , v ) w 2 ( u , v ) . . . w N ( u , v ) , ( u , v ) ∈ E , where w i ( u , v ) = ln µ i s i u , if ℓ u ( i ) = i s and ℓ v ( i ) = i u , ln µ i u i s , if ℓ u ( i ) = i u and ℓ v ( i ) = i s , 0 , otherwise , i = 1 , 2 , . . . , N . (8) Here λ i s , λ i u , and µ i s i u , µ i u i s , i = 1 , 2 , . . . , N are as described in Facts 1 an d 2, respectively . Remark 2 . W e will aim for achieving GAS of each switched system (3), i = 1 , 2 , . . . , N . For th is p urpose, we will compen sate the incr ease in V p , p ∈ { i s , i u } caused b y activation of un stab le mo d e i u and switches between stable an d unstable mod es ( i s to i u and i u to i s ) by the decrease in V p , p ∈ { i s , i u } achieved b y using the stable modes i s , i = 1 , 2 , . . . , N . A s a n atural choice, the vertex (sub system) weights of G relate to the rate of increase / decrease of the L y apunov- like fu nctions V p captured by the 5 scalars λ p , p ∈ { i s , i u } , and the ed ge (switch) weights of G relate to the “jump” b etween L yap unov-like functions V p and V q , p , q ∈ { i s , i u } captured by the scalars µ pq , p , q ∈ { i s , i u } , i = 1 , 2 , . . . , N . 3 Example 1. Con sider an NCS with N = 3 and M = 2 . The correspo nding directed grap h G has ◦ 3 2 = 3 vertices, V = { v 1 , v 2 , v 3 } with labels L ( v 1 ) = { 1 s , 2 s , 3 u } , L ( v 2 ) = { 1 s , 2 u , 3 s } , L ( v 3 ) = { 1 u , 2 s , 3 s } , and ◦ 6 directed ed ges, E = { ( v 1 , v 2 ) , ( v 1 , v 3 ) , ( v 2 , v 1 ) , ( v 2 , v 3 ),( v 3 , v 1 ) , ( v 3 , v 2 ) } . A pictorial represen tation o f G is sho wn belo w . v 1 v 2 v 3 The weights associated to the vertices an d edges of G are: w ( v 1 ) = − ln λ 1 s − ln λ 2 s ln λ 3 u , w ( v 2 ) = − ln λ 1 s ln λ 2 u − ln λ 3 s , w ( v 3 ) = ln λ 1 u − ln λ 2 s − ln λ 3 s , and w ( v 1 , v 2 ) = 0 ln µ 2 s 2 u ln µ 3 u 3 s , w ( v 1 , v 3 ) = ln µ 1 s 1 u 0 ln µ 3 u 3 s , w ( v 2 , v 1 ) = 0 ln µ 2 u 2 s ln µ 3 s 3 u , w ( v 2 , v 3 ) = ln µ 1 s 1 u ln µ 2 u 2 s 0 , w ( v 3 , v 1 ) = ln µ 1 u 1 s 0 ln µ 3 s 3 u , w ( v 3 , v 2 ) = ln µ 1 u 1 s ln µ 2 s 2 u 0 . Remark 3. By construction of G , it co ntains two directed edges ( u , v ) an d ( v , u ) between e very two vertices u , v ∈ V . Employing an undirected graph instead of a directed o ne may appear to b e a natural cho ic e here. Howe ver , the use of directed edges allows us to disting uish easily betwe e n the tran sitions i s to i u and i u to i s , i = 1 , 2 , . . . , N , and assign weigh ts to the correspo n ding edges accordingly . No tice that since the vertex labels are distinct, for ev ery two vertices u , v ∈ V , there exists at least one i for which w i ( u , v ) and w i ( v , u ) are di ff erent, i ∈ { 1 , 2 , . . . , N } . Recall th at [3, p . 4] a walk on a directed graph G ( V , E ) is an alternatin g sequen ce of vertices and edg es W = ˜ v 0 , ˜ e 1 , ˜ v 1 , ˜ e 2 , ˜ v 2 , . . . , ˜ v ℓ − 1 , ˜ e ℓ , ˜ v ℓ , where ˜ v m ∈ V , ˜ e m = ( ˜ v m − 1 , ˜ v m ) ∈ E , 0 < m ≤ ℓ . The length of a w alk is its nu mber of edges, counting repetitions, e.g., the len gth of W is ℓ . The in itial vertex of W is ˜ v 0 and the fina l vertex of W is ˜ v ℓ . If ˜ v ℓ = ˜ v 0 , we say th at the walk is closed . A clo sed walk is called a cycle if the vertices ˜ v k , 0 < k < n a r e distinct f rom each other an d ˜ v 0 . W e will u se the following class of cycles on G for constructing a stabilizing scheduling policy: Definition 2 . A c ycle W = v 0 , ( v 0 , v 1 ) , v 1 , · · · , v n − 1 , ( v n − 1 , v 0 ), v 0 on G ( V , E ) is called T - contractive if th ere exist in tegers T v j > 0, j = 0 , 1 , . . . , n − 1, 2 ≤ n ≤ |V | such that the following set of inequ alities is satisfi ed: Ξ i ( W ) : = n − 1 X j = 0 w i ( v j ) T v j + n − 1 X j = 0 v n : = v 0 w i ( v j , v j + 1 ) < 0 (9) for all i = 1 , 2 , . . . , N , where n is the length of W , w ( v j ) is the weight associated to vertex v j , w i ( v j ) is the i -th element of w ( v j ), and w ( v j , v j + 1 ) is the weight associated to ed ge ( v j , v j + 1 ), w i ( v j , v j + 1 ) is the i -th element of w ( v j , v j + 1 ), i = 1 , 2 , . . . , N , j = 0 , 1 , . . . , n − 1. W e call th e scalar T v j as the T -factor of verte x v j , j = 0 , 1 , . . . , n − 1 . W e will employ the in tegers T v j , j = 0 , 1 , . . . , n − 1 to associate a time duration with every vertex v j , j = 0 , 1 , . . . , n − 1 that appears in W . This time du ration will deter m ine h ow lo ng a set of M plan ts can access th e share d commu n ication cha nnel while preservin g GAS of all plants in the NCS und er conside r ation. In the present discrete-time setting, th e association o f integers with time durations is n atural. Remark 4 . Definition 2 is an extension of [1 5, Definition 2] to a set of N switched systems in the d iscrete-time setting. In [15] the no tion of a con tractive cycle with T -factors chosen from a given interval of real num b ers was used to study input / o u tput-to- state stab ility (IOSS) of continuou s- tim e switched nonline a r systems under dwell time restrictions. 3 The use of absolute val ue and natural logarithm is explain ed in conte xt, see Remark 15. 6 A. KUNDU AND D. E. Q UEVEDO Example 2. Con sider the setting of E xample 1. Suppose that λ 1 s = λ 2 s = λ 3 s = 0 . 2 5 , λ 1 u = λ 2 u = λ 3 u = 1 . 1 , µ 1 s 1 u = µ 2 s 2 u = µ 3 s 3 u = 1 . 1 , µ 1 u 1 s = µ 2 u 2 s = µ 3 u 3 s = 1 . 2 . The cycle W = 1 , (1 , 2) , 2 , (2 , 1) , 1 on G is T -con tr activ e with T -factors T 1 = 5 an d T 2 = 4 . Ind eed, Ξ 1 ( W ) = − 1 . 3863 , Ξ 2 ( W ) = − 6 . 2 7 26 and Ξ 3 ( W ) = − 4 . 7 9 1. W e are now in a p osition to describe our solution to Problem 1. 3. S t abilizing periodic scheduli ng p olicies The following algo rithm is geared tow ards constructin g a p e riodic sch eduling policy . W e will sh ow that a scheduling policy ob tained from this algorithm is stabilizing. Let G ( V , E ) b e a directed graph repre sen tation of the NCS describ e d in § 2.Suppose th at G ( V , E ) admits a T -contra c ti ve cycle W = v 0 , ( v 0 , v 1 ) , v 1 , . . . , v n − 1 , ( v n − 1 , v 0 ) , v 0 (of leng th n ) with T -factors T 0 , T 1 , . . . , T n − 1 . Algorithm 1 Construction of a periodic scheduling policy Input: a T -co n tractive cycle W = v 0 , ( v 0 , v 1 ) , v 1 , . . . , v n − 1 ,( v n − 1 , v 0 ) , v 0 and correspo nding T -factors T 0 , T 1 , . . . , T n − 1 Output: a p eriodic scheduling policy γ Step I: F or each vertex v j , j = 0 , 1 , . . . , n − 1 , pick the elemen ts i with label ℓ v j ( i ) = i s , i = 1 , 2 , . . . , N , an d construct M- dimensiona l vectors s j , j = 0 , 1 , . . . , n − 1 . 1: for j = 0 , 1 , . . . , n − 1 do 2: Set p = 0 3: for i = 1 , 2 , . . . , N do 4: if ℓ v j ( i ) = i s then 5: Set p = p + 1 an d s j ( p ) = i 6: end if 7: e nd f o r 8: end for Step II : Con struct a scheduling p olicy using the vecto rs s j , j = 0 , 1 , . . . , n − 1 ob tained in Step I and th e T -factors T v j , j = 0 , 1 , . . . , n − 1 9: Set p = 0 and τ 0 = 0 10: for q = pn , pn + 1 , . . . , ( p + 1) n − 1 do 11: Set γ ( τ q ) = s q − pn and τ q + 1 = τ q + T v q − pn 12: Ou tput τ q and γ ( τ q ) 13: end for 14: Set p = p + 1 and go to 10. Giv en a set of matrices A i , B i , K i , i = 1 , 2 , . . . , N and a number M , Alg o rithm 1 employs a T -con tractive cycle W = v 0 , ( v 0 , v 1 ) , v 1 , . . . , v n − 1 , ( v n − 1 , v 0 ) , v 0 on G ( V , E ) to construct a scheduling policy γ that specifies, at e very time, M ( < N ) plants that a ccess th e shared co m municatio n ch annel. T he constru c tion of γ inv olves two step s: in Step I, cor respond ing to each vertex v j , j = 0 , 1 , . . . , n − 1, a vector s j , j = 0 , 1 , . . . , n − 1 is created. T he vector s j contains the elements i ∈ { 1 , 2 , . . . , N } for which ℓ v j ( i ) = i s , where ℓ v j ( i ) de notes the i -th elem e nt of the vertex label L ( v j ). Recall that by co nstruction, each L ( v j ) contains ℓ v j ( i ) = i s exactly for M i ’ s. Consequently , the leng th of s j is M , j = 0 , 1 , . . . , n − 1. I n Step II, a scheduling p o licy γ is obtained from the vectors s j , j = 0 , 1 , . . . , n − 1 and the T -factors T v j , j = 0 , 1 , . . . , n − 1 . Sets of M plants correspond ing to the elements in s j access the shared commun ication channel for T v j duration of time, j = 0 , 1 , . . . , n − 1. In particular, th e following mechanism is em ployed to construct v alu es of γ on the intervals [ τ pn : τ ( p + 1) n [, p = 0 , 1 , . . . : γ ( τ q ) = s q − pn τ q + 1 = τ q + T v q − pn ) q = pn , pn + 1 , . . . , ( p + 1) n − 1 . Clearly , a schedu ling policy γ co n structed as above, is period ic with period n − 1 X j = 0 T v j . A pictorial represen ta tio n of a sche duling policy obtained from Algorithm 1 is given in Figure 2. The following the o rem ass erts that a scheduling policy obta in ed from Algorithm 1 is a solution to Problem 1. Theorem 1. Conside r an N CS descr ibed in § 2. Let the m atrices A i , B i , K i , i = 1 , 2 , . . . , N and a numb e r M ( < N ) be g iv en. Then each plant in (1) is GAS under a scheduling policy γ obtained from Algorithm 1. 7 s 0 s 1 s n − 1 γ ( t ) 0 . . . t · · · T v 0 T v 1 T v n − 1 T v 0 T v 1 · · · F igure 2. An example schedulin g po licy: activ a tion of s j correspo n ds to activ ation o f the p lants w h ose indices appear in s j A proof of Theo rem 1 is provided in § 7. For an NCS con sisting of N d iscrete-time linear plan ts that are open loop unstable and closed - loop stable, and a shared co mmunic a tion ch annel that a llows access only to M ( < N ) plan ts at every time instant, Algorithm 1 constructs a periodic scheduling policy that en sures GAS of each plant in the NCS. Remark 5 . Our stabilizing scheduling po licy is static and thereby easy to implement: A T -co ntractive cycle on the und erlying weighted directed graph of the NCS is computed o ff -line, and the sched uling p olicy is implemented by following log ics in volving this cycle. The existence of a stab ilizing schedu ling policy pr oposed in this section , depends on the existence of a T -contr activ e cycle on th e under lying directed gra ph G of the NCS. It is, therefo re, of impo rtance to study how to detect / desig n a T -con tractive cycle on G . W e address this matter next. 4. A lgorithmic design of T - contra ctive cycles Giv en the we ig hted directed g raph G , existence o f a T -contractive cycle depend s on two factors: co n nectivity of G ( for existence o f cycles) and th e weights associated to th e vertices and edges of G (f o r T -contractivity of cycles). Since G is a complete grap h by co nstruction, it necessarily admits cycles. Fix a cycle W = v 0 , ( v 0 , v 1 ) , v 1 , . . . , v n − 1 , ( v n − 1 , v 0 ) , v 0 on G . The T -con tractivity of W is guara nteed by the existence of integers T v j > 0, j = 0 , 1 , . . . , n − 1 such that condition (9) is satisfied. Existence of such T v j ’ s d epend upo n th e vertex an d edge weights w ( v ), v ∈ V an d w ( u , v ) , ( u , v ) ∈ E a ssociated to G . These weights are functio n s o f the matrices P p and the scalars λ p , p ∈ { i s , i u } , i = 1 , 2 , . . . , N . Remark 6. Notice tha t the L ya p unov-like function s V p and conseque n tly , th e scalars λ p , p ∈ { i s , i u } an d µ pq , p , q ∈ { i s , i u } , i = 1 , 2 , . . . , N used in (9) are no t u nique. For each i ∈ { 1 , 2 , . . . , N } , we have that A i s is Schur stable an d A i u is unstable. I t is known that a Schur stable m a tr ix A ∈ R d × d satisfies the f o llowing [2, Propo sition 11.10.5]: fo r e very symmetric and po siti ve definite matrix Q ∈ R d × d , there exists a symmetric a n d p ositiv e definite matrix P ∈ R d × d such that the discrete-time L yapu nov equation A ⊤ P A − P + Q = 0 (10) holds. For a p re-selected symmetric and positive defin ite matrix Q i s , let P i s be th e solution to (10) with A = A i s , P = P i s and Q = Q i s ; we put V i s ( ξ ) : = ξ ⊤ P i s ξ as the cor respond ing L yap u nov-like functio n. Direct calcula tio ns along with an application of th e stand a rd inequ ality [2, Lemma 8.4.3] lead s to the estimate λ i s = 1 − λ min ( Q i s ) λ max ( P i s ) , which satisfies 0 < λ i s < 1. Similarly , for the unstable matrix A i u , there exists 0 < η < 1 such that η A i u is Schur stable. Fix a symmetr ic and positi ve definite matrix Q i u . L et P i u be the solution to (10) with A = η A i u , P = P i u and Q = Q i u ; we put V i u ( ξ ) : = ξ ⊤ P i u ξ as the corresp o nding L yapun ov-like fun ction. A straightforward calc u lation gi ves an estimate λ i u = 1 η 2 > 1. Clearly , th e cho ice of the m atrices Q p , p ∈ { i s , i u } determines the cho ice of the matrices P p , p ∈ { i s , i u } and the scalars λ p , p ∈ { i s , i u } , i = 1 , 2 , . . . , N . I n ad dition, the matrices P p , p ∈ { i s , i u } determine the scalars µ pq , p , q ∈ { i s , i u } as described in § 2.1. Recall th at G h as N M vertices. Consequ ently , dep ending on the v alue s of N and M , one m ay n eed to design a T -contra c ti ve cycle o n a “lar ge” direc te d gr aph fo r imp lementing the sch eduling policy prop osed in § 3. It is clear that ch e c king fo r existence of T v j , j = 0 , 1 , . . . , n − 1 correspo nding to all possible values of λ p , p ∈ { i s , i u } , µ pq , p , q ∈ { i s , i u } , i = 1 , 2 , . . . , N for every cycle W on G , is n o t numer ically tractable. T o overcome this issue, we will next add r ess the de sig n of a T -con tractive cycle on G in two steps: 8 A. KUND U AND D. E. QUEVEDO ◦ first, we identify c o ndition s o n the scalars λ p , p ∈ { i s , i u } an d µ pq , p , q ∈ { i s , i u } , i = 1 , 2 , . . . , N under which a cycle on G satisfying certain properties, is T -co ntractive, and ◦ secon d, giv en the matrices A i , B i , K i , i = 1 , 2 , . . . , N , we pre sent an algor ithm to design the scalars λ p , p ∈ { i s , i u } and µ pq , p , q ∈ { i s , i u } , i = 1 , 2 , . . . , N such that the above conditions are m et. Definition 3. A cycle W = v 0 , ( v 0 , v 1 ) , v 1 , . . . , v n − 1 , ( v n − 1 , v 0 ), v 0 on G ( V , E ) is called cand idate con tractive , if for each i = 1 , 2 , . . . , N , there exists at least one v j , j ∈ { 0 , 1 , . . . , n − 1 } such that ℓ v j ( i ) = i s . In view o f Defin ition 2, for T - contractivity of W = v 0 , ( v 0 , v 1 ) , v 1 , . . . , ( v n − 1 , v 0 ) , v 0 , we requ ir e that the cond ition Ξ i ( W ) < 0 holds f o r all i = 1 , 2 , . . . , N . Since for each i = 1 , 2 , . . . , N , the scalars ln λ i u , ln µ i s i u , ln µ i u i s ≥ 0 , existence of at least o ne v j , j ∈ { 0 , 1 , . . . , n − 1 } in W such that ℓ v j ( i ) = i s , is n ecessary . A candida te contra c tive cycle satisfies this pro perty . Fix an i ∈ { 1 , 2 , . . . , N } . W e let N pq denote the total nu m ber o f times ℓ v j ( i ) = p and ℓ v j + 1 ( i ) = q appear in W , p , q ∈ { i s , i u } , j = 0 , 1 , . . . , n − 1, v n : = v 0 . Observation 1 . Let W = v 0 , ( v 0 , v 1 ) , v 1 , . . . , v n − 1 , ( v n − 1 , v 0 ) , v 0 be a ca n didate contractiv e cycle on G . Sup pose th at there e xist integers T v j > 0, j = 0 , 1 , . . . , n − 1 such that the follo wing set of inequalities holds: − ln λ i s X j = 0 , 1 ,..., n − 1 | ℓ v j ( i ) = i s T v j ! + ln λ i u X j = 0 , 1 ,..., n − 1 | ℓ v j ( i ) = i u T v j ! + (ln µ i s i u ) N i s i u + (ln µ i u i s ) N i u i s < 0 , i = 1 , 2 , . . . , N , (11) where the scalars λ p , p ∈ { i s , i u } and µ pq , p , q ∈ { i s , i u } , i = 1 , 2 , . . . , N are as described in F acts 1 and 2, respecti vely . T hen W is T -contrac tive with T - factors T v j associated to the vertices v j , j = 0 , 1 , . . . , n − 1. In view o f th e d efinitions o f vertex and e d ge weig hts w ( v ), v ∈ V and w ( u , v ), ( u , v ) ∈ E o f G , the above o bservation follows immediately from ( 9). A stabilizing sch eduling po licy γ constru c ted by employing th e c ycle W is periodic with period n − 1 X j = 0 T v j . No tice that we do n ot con sider the terms N pq , p , q ∈ { i s , i u } , p = q for the candid ate contractive cycle W , which is no loss of generality . I ndeed, from [16, Proposition 1], we ha ve th a t ln µ i s i s = ln µ i u i u = 0, i = 1 , 2 , . . . , N . Giv en the matrice s A i , B i , K i , i = 1 , 2 , . . . , N , and a candidate co ntractive cycle W , our next algorith m find s p airs ( P p , λ p ), p ∈ { i s , i u } , i = 1 , 2 , . . . , N such that condition (11) holds. Remark 7. The pairs ( P p , λ p ), p ∈ { i s , i u } are solutions to the following set of Bilinear Matrix Inequ alities ( BMI): A ⊤ i s P i s A i s − λ i s P i s 0 , P i s ≻ 0 , 0 < λ i s < 1 , A ⊤ i u P i u A i u − λ i u P i u 0 , P i u ≻ 0 , λ i u ≥ 1 . (12) In gene ral, solving BMIs is a numer ic a lly di ffi cult task. W e will use a grid -based approach, where the BMIs are transfor m ed into LMIs — solution tools for which are widely a vailable. In Algor ith m 2 we employ a grid- b ased ap proach to design the pairs ( P i s , λ i s ) and ( P i u , λ i u ) such that with the definition (4), inequ ality (5) h olds. 4 The scalars λ i s and λ i u are v aried over th e sets Λ S i and Λ U i , respectively . The elements of Λ S i belong to the interval ]0 , 1 [, while the set Λ U i is d etermined as f ollows: a scalar η i is varied over ]0 , 1[ with step-size h u , and the estimates 1 η 2 i satisfying η i A i is Schur stable are stored in Λ U i . For a fixed pair ( λ i s , λ i u ) with λ i s ∈ Λ S i and λ i u ∈ Λ S i , th e following set o f LMIs is solved: A ⊤ i s P i s A i s − λ i s P i s 0 , A ⊤ i u P i u A i u − λ i u P i u 0 . (15) If a so lu tion to (15) is f ound, then the scalars µ i s i u and µ i u i s are computed using the estimates given in [16, Pro position 1]. The feasibility pr oblem (14) is th en solved with the above estimates o f λ i s , λ i u , µ i s i u , µ i u i s . I f there is a solu tion to (1 4), th en the values o f T v j , j = 0 , 1 , . . . , n − 1 are stored an d Algorithm 2 terminates. Other wise, the pair ( λ i s , λ i u ) is u pdated and the above process is repeated. Remark 8. The condition κ I P i s , P i u I in the feasibility pro blem (13) is n ot in herent to the inequalities (12). It is included f or num erical r easons, in p articular, κ I P i s , P i u limits the condition n umber s o f P i s and P i u to κ − 1 , and the con d ition P i s , P i u I gu a rantees that the set o f feasible P i s , P i u is bound e d. Remark 9. Notice that even if the step-sizes h s and h u are chosen to be very small, only a finite numb er of possibilities f or ( P p , λ p ), p ∈ { i s , i u } , i = 1 , 2 , . . . , N are explo red in Algorithm 2. Consequen tly , if n o solution to the feasibility prob lem (14) is fo und, it is n ot imm ediate whethe r there are indeed n o pairs ( P i s , λ i s ) and ( P i u , λ i u ), i = 1 , 2 , . . . , N for the given m atrices A i , B i , K i such that there are integers T v j , j = 0 , 1 , . . . , n − 1 satisfying cond ition (11). Algorithm 2, ther efore, o ff ers on ly a 4 Alterna ti vel y , one could also use the path-follow ing method proposed in [7]. 9 Algorithm 2 Design of a T - c ontractive cycle Input : matrice s A i , B i , K i , i = 1 , 2 , . . . , N , a candid ate contracti ve cycle W = v 0 , ( v 0 , v 1 ) , v 1 , . . . , v n − 1 , ( v n − 1 , v 0 ) , v 0 Output : T -factors for W Step I: Compute the matrices A i s and A i u , i = 1 , 2 , . . . , N 1: for i = 1 , 2 , . . . , N do 2: Set A i s = A i + B i K i and A i u = A i 3: end for Step II: Compute the inte gers N pq , p , q ∈ { i s , i u } , i = 1 , 2 , . . . , N 4: for i = 1 , 2 , . . . , N do 5: Co mpute N pq , p , q ∈ { i s , i u } from W 6: end for Step III : F ix a set of values for λ i s ∈ ]0 , 1 [ , i = 1 , 2 , . . . , N 7: Fix a step- size h s > 0 (small enoug h) and com pute k s > 0 such that k s is the maximum integer satis fying k s h s < 1 8: for i = 1 , 2 , . . . , N do 9: Set Λ S i = { h s , 2 h s , . . . , k s h s } 10: end for Step IV : F ix a set of values for λ i u ∈ [1 , + ∞ [ , i = 1 , 2 , . . . , N 11: Fix a step-size h u > 0 (small enough) and compute k u > 0 such that k u is the maximum integer satisfying k u h u < 1 12: for i = 1 , 2 , . . . , N do 13: Set Λ U i = ∅ 14: for η i = h u , 2 h u , . . . , k u h u do 15: if η i A i is Schur stable then 16: Add element 1 η 2 i to the set Λ U i 17: end if 18: end for 19: end for Step V : Check for pa irs ( P p , λ p ) , p ∈ { i s , i u } , i = 1 , 2 , . . . , N under which W is T -contractive 20: for all pairs ( λ i s , λ i u ), λ i s ∈ Λ S i , i u ∈ Λ U i , i = 1 , 2 , . . . , N do 21: So lve the following feasibility problem in P p , p ∈ { i s , i u } : minimize 1 subject to A ⊤ i s P i s A i s − λ i s P i s 0 , A ⊤ i u P i u A i u − λ i u P i u 0 , P i s , P i u ≻ 0 , κ I P i s , P i u I , κ > 0 (13) 22: if th ere is a solution to (13) then 23: Compute µ i s i u = λ max ( P i u P − 1 i s ) and µ i u i s = λ max ( P i s P − 1 i u ) 24: Solve the fo llowing feasibility problem in T v j , j = 0 , 1 , . . . , n − 1: minimize 1 subject to T v j > 0 , j = 0 , 1 , . . . , n − 1 , condition (1 1) . (14) 25: if th ere is a solution to (14) then 26: Output T v j , j = 0 , 1 , . . . , n − 1 and exit Algorithm 2 27: end if 28: end if 29: end for partial solu tion to the prob lem o f designing suitab le m atrices P p and the scalars λ p , p ∈ { i s , i u } , i = 1 , 2 , . . . , N in the sense that the algo rithm does not co nclude about their n on-existence. It is, ther efore, of in terest to identif y su ffi cient cond itions under which the feasibility problem (14) admits a solution. W e discuss this matter next. 10 A. KUND U AND D. E. QUEVEDO Existence of a solution to the feasibility p roblem ( 14) depen ds on the ch oice of a can didate contractive cycle W and th e scalars λ p , p ∈ { i s , i u } , i = 1 , 2 , . . . , N . 5 The fir st compon ent ab ove is governed by the given n umbers M an d N . Recall that for a v ertex v ∈ V , ℓ v ( m ) deno tes the m -th element of its label L ( v ). Let v s denote the set of elemen ts j 1 , j 2 , . . . , j M ∈ { 1 , 2 , . . . , N } satisfying ℓ v ( j p ) = j p s , p = 1 , 2 , . . . , N . Below we pro p ose a set of s u ffi cient conditions o n the scalars λ p , p ∈ { i s , i u } , i = 1 , 2 , . . . , N and the num ber M u nder which the feasibility problem (14) admits a solution. Proposition 1. Let M = 1. Con sider a candidate co ntractive cycle W = v 0 , ( v 0 , v 1 ) , v 1 , . . . , v N − 1 , ( v N − 1 , v 0 ) , v 0 on G ( V , E ) th at satisfies v s k ∩ v s ℓ = ∅ for all k , ℓ = 0 , 1 , . . . , N − 1, k , ℓ . Suppose that the scalars λ p , p ∈ { i s , i u } , i = 1 , 2 , . . . , N satisfy ln λ i s − ( N − 1) ln λ i u > 0 , i = 1 , 2 , . . . , N . (16) Then there exists ˜ T ∈ N such that the cycle W is T -contr activ e with T v j = ˜ T > 0, j = 0 , 1 , . . . , N − 1. Proposition 2. Let M ≥ N / 2. Consider a candidate contractive cycle W = v 0 , ( v 0 , v 1 ) , v 1 , ( v 1 , v 0 ) , v 0 on G ( V , E ) that satisfies v s 1 ⊃ { 1 , 2 , . . . , N } \ v s 0 . Supp ose that th e scalars λ p , p ∈ { i s , i u } , i = 1 , 2 , . . . , N satisfy ln λ i s − ln λ i u > 0 , i = 1 , 2 , . . . , N . (17) Then there exists ˜ T ∈ N such that the cycle W is T -contr activ e with T v 0 = T v 1 = ˜ T . Proposition 1 de a ls with th e case when exactly on e plant is allowed to a c cess the shared com m unication channe l at any time instant, while Proposition 2 deals with the c a se wh ere at least half of the total number of plants h av e access to the shared commun ication chan nel. I n case o f the former , a T -contractive cycle contains e xactly one verte x v j with ℓ v j ( i ) = i s for each i , j = 0 , 1 , . . . , N − 1 , while in case o f the latter , ℓ v j ( i ) = i s for each i , is accom modated in two vertices, j = 0 , 1, i = 1 , 2 , . . . , N . Condition (17) is a relaxation of condition (16). W e present concise proof s o f Propositions 1 and 2 in § 7. Example 3. Con sider N = 3 with ( A 1 , B 1 , K 1 ) = 0 . 2 0 . 7 1 . 6 0 . 1 ! , 1 0 ! , − 0 . 275 2 − 0 . 6705 ! , ( A 2 , B 2 , K 2 ) = 1 0 . 1 0 . 1 1 ! , 0 1 ! , − 0 . 913 7 − 0 . 9505 ! , ( A 3 , B 3 , K 3 ) = 1 . 2 0 . 2 0 . 1 0 . 9 ! , 1 0 ! , − 1 . 075 7 − 0 . 4839 ! . Correspon d ing to V p ( ξ ) = ξ ⊤ P p ξ , p ∈ { i s , i u } , i = 1 , 2 , 3, we obtain the following estimates of the scalars λ p , p ∈ { i s , i u } an d µ pq , p , q ∈ { i s , i u } , i = 1 , 2 , 3: λ 1 s = 0 . 278 7 , λ 1 u = 1 . 562 5 , µ 1 s 1 u = 4 . 178 6 , µ 1 u 1 s = 1 . 533 8 , λ 2 s = 0 . 085 9 , λ 2 u = 1 . 234 6 , µ 2 s 2 u = 23 . 55 78 , µ 2 u 2 s = 1 . 913 0 , λ 3 s = 0 . 214 7 , λ 3 u = 2 . 0 408 . µ 3 s 3 u = 3 . 652 4 , µ 3 u 3 s = 2 . 523 8 . Let M = 1 . W e have th a t condition (16) holds. Indeed , ln λ 1 s − 2 ln λ 1 u = 0 . 3 850 > 0 , ln λ 2 s − 2 ln λ 2 u = 2 . 0 331 > 0 , ln λ 3 s − 2 ln λ 3 u = 0 . 1 118 > 0 . The cycle W 1 = v 0 , ( v 0 , v 1 ) , v 1 , ( v 1 , v 2 ) , v 2 , ( v 2 , v 0 ) , v 0 , wh ere ℓ v 0 (1) = 1 s , ℓ v 1 (2) = 2 s and ℓ v 2 (3) = 3 s , is T - contractive with T v 0 = T v 1 = T v 2 = ˜ T = 20 . W e have Ξ 1 ( W 1 ) = − 6 . 05 96, Ξ 2 ( W 1 ) = − 36 . 8 5, Ξ 3 ( W 1 ) = − 0 . 01 54. Now , let M = 2( > N 2 ). Since the scalars λ p , p ∈ { i s , i u } , i = 1 , 2 , 3 satisfy (16), it is immediate that (17 ) holds. Th e cycle W 2 = v 0 , ( v 0 , v 1 ) , v 1 , ( v 1 , v 0 ) , v 0 , where ℓ v 0 (1) = 1 s , ℓ v 0 (2) = 2 s and ℓ v 1 (2) = 2 s , ℓ v 1 (3) = 3 s , is T -co n tractive with T v 0 = T v 1 = ˜ T = 5. I n deed, Ξ 1 ( W 2 ) = − 2 . 29 90, Ξ 2 ( W 2 ) = − 2 4 . 545 7, Ξ 3 ( W 2 ) = − 1 . 90 47. Remark 10. Both in Pr o positions 1 and 2, we consider the simplest setting where the T -factors a ssoc iate d to all v ertices that appear in W = v 0 , ( v 0 , v 1 ) , v 1 , . . . , v n − 1 , ( v n − 1 , v 0 ) , v 0 , are the same. Howe ver, this choice o f T -factors can also be extended to non-eq ual T v j , j = 0 , 1 , . . . , n − 1. For instance, in Example 3, the can d idate contractive cycle W 2 = v 0 , ( v 0 , v 1 ) , v 1 , ( v 1 , v 0 ) , v 0 is also T -contractive with T v 0 = 5 and T v 1 = 4. It follows th at Ξ 1 ( W 2 ) = − 2 . 74 52, Ξ 2 ( W 2 ) = − 2 2 . 091 1, Ξ 3 ( W 2 ) = − 0 . 36 62. 5 Notice that while the scal ars µ pq , p , q ∈ { i s , i u } , i = 1 , 2 , . . . , N a ff ect the choice of T -fact ors that solve the feasibi lity problem (14), they do not a ff ect the existe nce of a solution to (14). Indeed, gi ven the scalars λ p , p ∈ { i s , i u } and µ pq , p , q ∈ { i s , i u } , i = 1 , 2 , . . . , N , and a candidate contracti ve cyc le W = v 0 , ( v 0 , v 1 ) , v 1 , . . . , v n − 1 , ( v n − 1 , v 0 ) , v 0 on G , if there exists T v j = ˜ T , j = 0 , 1 , . . . , n − 1 such that condit ion (11) holds, then it follo ws tha t condition (11) holds for any T ′ ≥ ˜ T . 11 Remark 1 1. Switched systems have ap peared bef ore in NCS s literature, see e . g., [5, 1 3, 21, 31], and average dwell time switching logic is proven to be a u seful to ol. In the presence of unstab le sy stems, stabilizing average dwell time switching in volves two co nditions on ]0 : t ] for every t ∈ N [24]: i) an up per bou nd on the n umber of switches and ii) a lower bo und on the ra tio of duration s o f activ ation o f stable to u nstable sub systems. In contrast, ou r design of a stabilizin g sched uling policy in volves design o f a T -con tractive cycle on the under ly ing weigh ted directed graph o f the NCS. T o desig n these cycles, we solve th e feasibility problem s (13) an d (1 4). Con dition (9 ) does not inv o lve nor imply restrictions on the b ehaviour of a scheduling policy on e very interval ] 0 : t ], t ∈ N . Remark 12. In the recent p ast, multiple L y apunov-like fun ctions and grap h-theor etic tools are widely used to construct stabilizing switch ing logics for switched system s, see e.g ., [15 – 17]. A weigh ted directed graph is associated to a family o f systems and the a d missible transitions between them , and a switching logic is expr essed as an infinite walk on this weig hted directed graph . Infinite walks whose co rrespon ding switch in g logics pr eserve stability , ar e constructed by emp loying negative weight cycles, see [ 15, § 3], [16, § 3], [17, § 3] for details. In our curren t paper , instead of studying GAS of a switched system, we a n alyze “simultaneou s” GAS of N switched systems each con taining one asymptotically stable an d one unstable subsystem. For that pur pose, a stabilizing sched uling policy is de signed by incorp o rating multiple switch ing lo gics, ea c h of which is stabilizing. No t surp risingly , th e design of T -con tractive cycles tran scen ds beyond iden tifying n egativ e weigh t cycles on a weighted directed graph: it in volves selection of T -factors that preserve GAS of all N p lants, where e very T -factor adds to the negativity of Ξ i ( W ) for M plants and to the positivity of Ξ i ( W ) for th e rem a in ing N − M plan ts. In addition, so far in the literature, negati ve weight cycles for stability of a switched system are designed und e r the assumption th a t th e L yap unov-like function s V p , p ∈ { i s , i u } and the correspo nding scalars λ p , p ∈ { i s , i u } , i ∈ { 1 , 2 , . . . , N } a r e “given”, see e.g., [1 5, Rema r k 9], [16, Remark 9], [17, § 2.2] for discussion s. I n contrast, in the present w ork we deal with the harder problem o f identifying T - contractive cycles on G , and d esign multiple L yapun ov-like fun ctions V p and th e co rrespon ding scalars λ p , p ∈ { i s , i u } , i = 1 , 2 , . . . , N such that these cycles exist. Remark 13. Op timal sched uling po licies for remo te state estimation in sensor networks are studied recently in [6, 18, 19]. In the context of our resu lts, one can utilize pr o perties of T -contr a ctiv e cycles o n G to ach iev e optimal stability margin for a scheduling policy . No tice that the choice of T -factors for a T - contractive cycle on the under ly ing weighted d irected graph of the NCS under consid e ration, is no t uniq ue. Additionally , th e choice o f a T -con tractive c ycle itself is not uniq ue. It is clear that employing “any” T -con tractive cycle W on G is su ffi c ie n t to co nstruct a stabilizing per iodic schedu ling po licy as far as GAS o f eac h pla n t i in (1) is concern ed. Fix i ∈ { 1 , 2 , . . . , N } . Any T -con tr activ e cycle yields Ξ i ( W ) = − ε i for some ε i > 0 . W e ob serve that as ε i increases, the rate of con vergence of k x i ( t ) k imp roves, see also experimen tal results in § 5. Remark 14 . The n on-un iqueness of T -factors and T -contr a ctiv e cycles d escribed in Remark 13 can be exploited to exten d our resu lts to the setting of a static scheduling po licy with a non- periodic structure. Indeed , suppose that W 1 and W 2 are two distinct (d i ff erent in terms o f either T -factors or vertices) T -con tractive cycles on G . T h en a schedu ling policy o f non- periodic structure can be ge n erated by concate n ating W 1 and W 2 , e. g ., W 1 W 2 W 1 W 2 W 2 W 1 W 2 W 2 W 2 . . . . Such a schedulin g policy is static beca u se the allo cation sequ ences of the shared commu nication chan nel are co m puted o ffl in e, b ut the sequ ences are applied in a non- periodic m anner . 5. N umerical exp eriments 5.1. Experiment 1. 5.1.1. Th e NCS. Consider an NCS with N = 5 d iscrete-time linear plants and a share d com municatio n ch annel of limited capacity . The m atrices A i ∈ R 2 × 2 , B i ∈ R 2 × 1 and K i ∈ R 1 × 2 , i = 1 , 2 , 3 , 4 , 5 are ch osen as f ollows, n umerical values are given in T able 1. ◦ Elem e n ts of A i are selected from the interval [ − 2 , 2] uniformly at random. ◦ Elem e n ts of B i are selected by picking values from the { 0 , 1 } . ◦ It is ensu r ed that the pair ( A i , B i ) is controllab le; K i is the discrete-time lin e ar quadr atic regulator for ( A i , B i ) with Q i = Q = 5 I 2 × 2 and R i = R = 1 . Suppose that M = 2 plan ts are allowed to access the commun ica tion chan n el at e very instant of time. 5.1.2. Non -triviality. W e note that designing a stabilizin g schedu ling policy in the above setting is n ot a tri v ial pr oblem. Indeed , co nsider a round-rob in sch eduling policy plan ts 1 and 2 followed by plants 2 and 3 f o llowed by plants 4 and 5 accessing the cha n nel, each c ombinatio n being active for 1 unit of time. I n Figu re 3 we demo nstrate that the p lants 4 a nd 5 are unstable under this scheduling policy , and con sequently , a careful d esign of γ is essential. 12 A. KUND U AND D. E. QUEVEDO i A i B i K i | λ ( A i ) | | λ ( A i + B i K i ) | 1 1 . 031 0 0 . 972 5 − 0 . 431 1 0 . 6219 ! 1 0 ! − 0 . 986 9 − 0 . 7541 1 . 029 8 , 1 . 029 8 0 . 348 7 , 0 . 348 7 2 0 . 837 5 1 . 018 7 − 0 . 895 9 0 . 7 188 ! 0 1 ! 0 . 497 8 − 1 . 0 887 1 . 230 7 , 1 . 230 7 0 . 309 5 , 0 . 309 5 3 1 . 257 1 − 1 . 0 259 1 . 717 1 − 0 . 6 001 ! 1 0 ! − 0 . 724 7 0 . 8 152 1 . 003 6 , 1 . 003 6 0 . 205 6 , 0 . 205 6 4 0 . 756 9 0 . 992 6 − 0 . 197 8 − 1 . 6647 ! 1 1 ! − 0 . 093 3 0 . 8 329 0 . 672 9 , 1 . 580 7 0 . 082 6 , 0 . 250 8 5 0 . 529 4 − 1 . 609 8 − 0 . 886 0 0 . 1875 ! 0 1 ! 0 . 985 2 − 0 . 6 016 1 . 564 9 , 0 . 848 0 0 . 308 5 , 0 . 193 2 T able 1. Descr ip tion of indi vidual plants in the NCS t 0 5 10 15 20 ||x i (t)||, i = 1,2,3,4,5 0 10 20 30 40 50 60 70 80 plant 1 plant 2 plant 3 plant 4 plant 5 F igure 3. Not all plants are GAS under roun d-rob in sched uling 5.1.3. Th e un derlying weighted dir ected graph. W e con struct the underlyin g d ir ected graph G ( V , E ) of the NCS un der con- sideration. For the gi ven setting we h av e N M = 10. G consists of: ◦ V = { v 1 , v 2 , . . . , v 10 } with L ( v 1 ) = { 1 s , 2 s , 3 u , 4 u , 5 u } , L ( v 2 ) = { 1 s , 2 u , 3 s , 4 u , 5 u } , L ( v 3 ) = { 1 s , 2 u , 3 u , 4 s , 5 u } , L ( v 4 ) = { 1 s , 2 u , 3 u , 4 u , 5 s } , L ( v 5 ) = { 1 u , 2 s , 3 s , 4 u , 5 u } , L ( v 6 ) = { 1 u , 2 s , 3 u , 4 s , 5 u } , L ( v 7 ) = { 1 u , 2 s , 3 u , 4 u , 5 s } , L ( v 8 ) = { 1 u , 2 u , 3 s , 4 s , 5 u } , L ( v 9 ) = { 1 u , 2 u , 3 s , 4 u , 5 s } , L ( v 10 ) = { 1 u , 2 u , 3 u , 4 s , 5 s } , and ◦ E = { ( v p , v q ) , p , q = 1 , 2 , . . . , 10 , p , q } . 5.1.4. A T -contractive cycle. Fix a cand idate con tr activ e cycle W = v 0 , ( v 0 , v 1 ) , v 1 , ( v 1 , v 2 ) , v 2 , ( v 2 , v 0 ) , v 0 on G , wh ere v 0 = v 5 , v 1 = v 4 , v 2 = v 10 . W e apply Alg o rithm 2 with h s = 0 . 0001 and h u = 0 . 1, and obtain that W is T -contractive with T - factors: T v 0 = 4 , T v 1 = 3, T v 2 = 5. I ndeed, Ξ 1 ( W ) = − 2 . 762 9, Ξ 2 ( W ) = − 8 . 087 7, Ξ 3 ( W ) = − 7 . 9 572, Ξ 4 ( W ) = − 0 . 262 6, Ξ 5 ( W ) = − 5 . 8 414. Th e correspo nding v alues of the scalars λ p , p ∈ { i s , i u } and µ pq , p , q ∈ { i s , i u } , i = 1 , 2 , . . . , N are given in T able 2. i λ i s λ i u µ i s i u µ i u i s 1 0 . 136 0 1 . 2 346 2 . 84 52 1 . 3232 2 0 . 072 0 1 . 2 346 1 . 56 81 1 . 3509 3 0 . 071 5 1 . 2 346 1 . 90 25 1 . 3046 4 0 . 175 7 2 . 7 778 3 . 08 54 1 . 1665 5 0 . 243 0 2 . 7 778 3 . 46 64 1 . 1576 T able 2. Descr ip tion of scalars admitting a solution to feasibility problem (1 4) 5.1.5. Th e scheduling policy. A sched uling policy γ is obta in ed from Algorith m 1. γ is co nstructed by employin g W , and it is perio d ic with p eriod T v 0 + T v 1 + T v 2 = 12 units of time. In Figure 4 we illustrate γ until time t = 60. 13 0 12 24 36 48 60 γ (t) 1 2 3 4 5 F igure 4. Sched uling policy γ o btained from Algorithm 1 5.1.6. GA S of NCS. W e ch o ose 1 0 0 di ff eren t initial co n ditions from the inter val [ − 10 , 10 ] 2 unifor m ly at ran dom, and plot ( k x i ( t ) k ) t ∈ N 0 under the sched uling policy γ , i = 1 , 2 , 3 , 4 , 5. Figur e 5 contains plots for k x i ( t ) k , i = 1 , 2 , 3 , 4 , 5 u ntil time t = 60. It is observed that the indi vidual plants o f the NCS under consideration are GAS under our scheduling policy . t 0 10 20 30 40 50 60 ||x 1 (t)|| 0 5 10 15 20 25 Plant 1 t 0 10 20 30 40 50 60 ||x 2 (t)|| 0 2 4 6 8 10 12 14 16 18 20 Plant 2 t 0 10 20 30 40 50 60 ||x 3 (t)|| 0 5 10 15 20 25 Plant 3 t 0 10 20 30 40 50 60 ||x 4 (t)|| 0 50 100 150 200 250 300 350 400 450 500 Plant 4 t 0 10 20 30 40 50 60 ||x 5 (t)|| 0 20 40 60 80 100 120 Plant 5 F igure 5. Plot fo r k x i ( t ) k versus t for each plant i = 1 , 2 , 3 , 4 , 5 5.1.7. Comp arison. W e choose th ree distinct T -contr a ctiv e cycles W j = v ( j ) 0 , ( v ( j ) 0 , v ( j ) 1 ) , v ( j ) 1 , ( v ( j ) 1 , v ( j ) 2 ) , v ( j ) 2 , ( v ( j ) 2 , v ( j ) 0 ) , v ( j ) 0 on G . The description o f th e cycles an d th e correspo nding values of Ξ i ( W j ), j = 1 , 2 , 3 , i = 1 , 2 , 3 , 4 , 5 ar e gi ven in T a ble 3. W e now j v 0 v 1 v 2 T v 0 T v 1 T v 2 Ξ 1 ( W j ) Ξ 2 ( W j ) Ξ 3 ( W j ) Ξ 4 ( W j ) Ξ 5 ( W j ) 1 v 5 v 3 v 9 2 7 8 − 10 . 5325 − 1 . 350 3 − 23 . 9963 − 0 . 67556 − 0 . 73 315 2 v 2 v 6 v 7 3 8 9 − 1 . 076 9 − 43 . 3456 − 3 . 4224 − 0 . 3712 2 − 0 . 10 453 3 v 8 v 9 v 1 8 9 3 − 1 . 076 9 − 3 . 5599 − 43 . 30 57 − 0 . 37 122 − 0 . 1045 3 T able 3. Descr ip tion of di ff erent T -con tractive cycles on G illustrate that w ith smaller values of Ξ i ( W j ), the rate o f conver gence o f k x i ( t ) k to 0 be c o mes faster . F or this pur p ose, we pick 10 di ff erent initial conditions x i (0) from the interv al [ − 1 , 1 ] 2 unifor m ly at random and simulate ( k x i ( t ) k ) t ∈ N 0 for the cycles W j . Figure 6 contains plots for a verage x i (0) ( k x i ( t ) k ) t ∈ N 0 for the plant i = 3 correspond ing to the cycles W j . 14 A. KUND U AND D. E. QUEVEDO t 0 10 20 30 40 50 ||x 3 (t)|| 0 0.2 0.4 0.6 0.8 1 1.2 data for W 1 data for W 2 data for W 3 F igure 6. Plot fo r a verag e x 3 (0) k x 3 ( t ) k versus t co r respond ing to cycles W j . 5.2. Experiment 2. W e now test th e performan ce of our technique s in large scale settings. T his in volves a three- step proce- dure: ◦ First, we gener ate N non- Schur matrices A i ∈ R 2 × 2 and vectors B i ∈ R 2 × 1 with entries fro m the interval [ − 2 , 2] and the set { 0 , 1 } , respec tively , chosen un iformly at random , an d ensuring that eac h pa ir ( A i , B i ), i = 1 , 2 , . . . , N , is c o ntrollable . The associated linear quadratic regulators K i are computed with Q i = Q = 5 I 2 × 2 and R i = R = 1 . ◦ Secon d, the u nderlyin g directe d gr aph G of th e NCS is co nsidered, and a can didate con tractive cycle W = v 0 , ( v 0 , v 1 ) , v 1 , . . . , v n − 1 , ( v n − 1 , v 0 ) , v 0 on G is chosen in the following man ner: ⋄ Fix M = 10. W e pick 10 d istinct nu mbers from th e set { 1 , 2 , . . . , N } unif ormly at r andom, and repeat this pr ocess un til each element of { 1 , 2 , . . . , N } is picked at least once. ⋄ For ea c h set of 10 distinct numb ers picked above, we choose a vertex v on G that satisfies ℓ v ( i ) = i s for these n u mbers. W is con structed by concatenating these vertices neglecting repetitions. ◦ Th ir d, Algorithm 2 is employed with the chosen A i , B i , K i and W to de sig n the scalars λ i s , λ i u , µ i s i u , µ i u i s , i = 1 , 2 , . . . , N for T - contractivity of W . The step-sizes are chosen as h s = h u = 0 . 001 . W e repeat the above procedu re for large values of N an d study the total computatio n time s. Th e pr ocedur e is im plemented on a MA TLAB platform. 6 In T able 4 we list sizes of G and lengths of candidate contractiv e cycles W = v 0 , ( v 0 , v 1 ) , v 1 , . . . , v n − 1 , ( v n − 1 , v 0 ) , v 0 for various values of N , and the compu tation times. In case of N = 70 0, the first choice of cand idate contractiv e cycle W did not turn out to be T -con tractive fro m Algor ithm 2. W e then rep e a ted the process of generating a candidate contractive cycle, and obtained a solution from Algorithm 2 for th e new cho ice of W . N |V| n Comp utation time (sec) 100 1 . 73 × 10 13 61 4681. 77 200 2 . 24 × 10 16 104 7966. 65 500 2 . 45 × 10 20 345 35268 . 59 700 7 . 3 × 1 0 21 532 76746 . 32 1000 2 . 63 × 1 0 23 822 70453 . 28 T able 4. Gr a ph and cycle data 6. C oncluding remarks In this p aper we presented a stabilizing scheduling policy for NCSs under medium access con straints. A switched system representatio n is associated to the individual plants, an d a weig hted directed g raph is associated to th e NCS. Our schedu ling policy is designed by emp loying a T -con tr activ e cycle on the u nderly ing weighted directed gr aph of the NCS. W e a lso address algorithm ic con struction of T - contractive cycles. Since o ur algo rithm for designing T -contr activ e cycles d oes not con clude about their non-existence , an impo rtant question is regardin g the desig n of such cycles when our algor ithm does n ot yield a solution for all choices of candid ate contractive cycle on a weighted directed grap h. Also, a n atural extension of our work 6 V ersion: R2015a, System specificati ons: Intel Core i7 processor , 8GB RAM, 64-bit OS. 15 is to a c c ommod ate network ind uced uncertain ties such as acce ss delays, packet dr opouts, e tc . in the fe e d back co ntrol loop. These aspects are currently under in vestigation and will be reported else wher e. 7. P r o ofs of resul ts Pr oof o f Theor em 1. Conside r the NCS described in § 2 and its und erlying directed grap h G ( V , E ). L et W = v 0 , ( v 0 , v 1 ) , v 1 , . . . , v n − 1 , ( v n − 1 , v 0 ) , v 0 be a T -contractive cycle on G . Consider a sch eduling policy γ ob tained from Algorith m 1 c o nstructed b y employing W . W e w ill show that each plant in (1) is GAS u nder γ . Fix an arbitrary plant i ∈ { 1 , 2 , . . . , N } . In view of the switched systems represen tation o f plant i in (3), it su ffi ces to show that the switching logic σ i correspo n ding to γ , ensures GAS of plant i . Fix a tim e t ∈ N . Recall th at 0 = : τ 0 < τ 1 < · · · are the poin ts in time at wh ich γ changes values. Let N γ t be the total number of times γ has chan ged its values on ]0 : t ]. In v iew of (5), we have V σ i ( t ) ( x i ( t )) ≤ λ t − τ N γ t σ i ( τ N γ t ) V σ i ( τ N γ t ) ( x i ( τ N γ t )) . (18) A straightfor ward iteration of (18) using (5) and (6) giv es V σ i ( t ) ( x i ( t )) ≤ N γ t Y j = 0 τ N γ t + 1 : = t λ τ j + 1 − τ j σ i ( τ j ) · N γ t − 1 Y j = 0 µ σ i ( τ j ) σ i ( τ j + 1 ) ! V σ i (0) ( x i (0)) . (19) The first term on the right-han d side of the above inequality can be rewritten as exp ln N γ t Y j = 0 τ N γ t + 1 : = t λ τ j + 1 − τ j σ i ( τ j ) ! + ln N γ t − 1 Y j = 0 µ σ i ( τ j ) σ i ( τ j + 1 ) !! . Now , ln N γ t Y j = 0 τ N γ t + 1 : = t λ τ j + 1 − τ j σ i ( τ j ) ! = N γ t X j = 0 τ N γ t + 1 : = t ( τ j + 1 − τ j ) ln λ σ i ( τ j ) = N γ t X j = 0 τ N γ t + 1 : = t X p ∈{ i s , i u } 1( σ i ( τ j ) = p )( τ j + 1 − τ j ) ln λ p . (20) Let D s ( s , t ) and D u ( s , t ) den ote the total dura tio ns nu mber of time-steps of activ ation of the stable and unstable modes o f i on ] s : t ], r espectively . Recall that 0 < λ i s < 1 and λ i u ≥ 1. Consequ ently , ln λ i s < 0 and ln λ i u ≥ 0. Thu s, the r ig ht-han d side of (20) is equal to − ln λ i s D s (0 , t ) + ln λ i u D u (0 , t ) . (21) Let N pq ( s , t ) den o te the total numb er of transition s from subsystem (mod e) p to subsystem (mo de) q , p , q ∈ { i s , i u } on ] s : t ]. W e have ln N γ t − 1 Y j = 0 µ σ i ( τ j ) σ i ( τ j + 1 ) ! = N γ t − 1 X j = 0 ln µ σ i ( τ j ) σ i ( τ j + 1 ) = X p ∈{ i s , i u } N γ t − 1 X j = 0 X p → q : q ∈{ i s , i u } , σ i ( τ j ) = p , σ i ( τ j + 1 ) = q ln µ pq = ln µ i s i u N i s i u (0 , t ) + ln µ i u i s N i u i s (0 , t ) , (22) since µ i s i s = µ i u i u = 1. Substituting (21) and (22) in (19), we obtain V σ i ( t ) ( x i ( t )) ≤ ψ i ( t ) V σ i (0) ( x i (0)) , (23) where N ∋ t 7→ ψ i ( t ) : = exp − ln λ i s D s (0 , t ) + ln λ i u D u (0 , t ) + ln µ i s i u N i s i u (0 , t ) + ln µ i u i s N i u i s (0 , t ) ! . (24) From the definition of V p , p ∈ { i s , i u } in (4) and proper ties of positi ve definite matrices [2, Lemma 8.4.3 ], it fo llows that k x i ( t ) k ≤ c ψ i ( t ) k x i (0) k for all t ∈ N 0 , (25) where c = v u u u t max p ∈{ i s , i u } λ max ( P p ) min p ∈{ i s , i u } λ min ( P p ) , wher e for a matrix A ∈ R d × d , λ min ( A ) d enotes the m inimum eigenv alue of A . By Definition 1 , to establish GAS of (3), we ne e d to show that c k x i (0) k ψ i ( t ) can be boun d ed above by a cla ss K L function. T owards this end, 16 A. KUND U AND D. E. QUEVEDO we already see th at c k x i (0) k is a class K ∞ function . Therefore, it remains to show that ψ i ( t ) is bo u nded above by a f unction in class L . Recall th at γ is co nstructed b y employing a T -contractive c ycle W = v 0 , ( v 0 , v 1 ) , v 1 , . . . , v n − 1 , ( v n − 1 , v 0 ) , v 0 on G , an d T v j , j = 0 , 1 , . . . , n − 1 are the T -factors associated to vertices v j , j = 0 , 1 , . . . , n − 1. Let T W : = n − 1 X j = 0 T v j , t ≥ mT W , m ∈ N 0 , and Ξ i ( W ) = − ε i , ε i > 0, where Ξ i ( W ) is as defined in (9). By construction of γ , we have ψ i ( t ) = exp − ln λ i s D s (0 , t ) + ln λ i u D u (0 , t ) + ln µ i s i u N i s i u (0 , t ) + ln µ i u i s N i u i s (0 , t ) ! = − ln λ i s D s (0 , mT W ) − ln λ i s D s ( mT W , t ) + ln λ i u D u (0 , mT W ) + ln λ i u D u ( mT W , t ) + ln µ i s i u N i s i u (0 , mT W ) + ln µ i s i u N i s i u ( mT W , t ) + ln µ i u i s N i u i s (0 , mT W ) + ln µ i u i s N i u i s ( mT W , t ) . (26) Notice that − ln λ i s D s (0 , mT W ) + ln λ i u D u (0 , mT W ) + ln µ i s i u N i s i u (0 , mT W ) + ln µ i u i s N i u i s (0 , mT W ) = − ln λ i s m X j : ℓ v j ( i ) = i s j = 0 , 1 ,..., n − 1 T v j + ln λ i u m X j : ℓ v j ( i ) = i u j = 0 , 1 ,..., n − 1 T v j + ln µ i s i u m #( i s → i u ) W + ln µ i u i s m #( i u → i s ) W , where #( p → q ) W denotes th e n umber o f times a tran sition fro m a vertex v j to a verte x v j + 1 has occur red in W such th at ℓ v j ( i ) = p and ℓ v j + 1 ( i ) = q , p , q ∈ { i s , i u } , p , q . Th e right-han d side of the above equality can be re written as m − ln λ i s X j : ℓ v j ( i ) = i s j = 0 , 1 ,..., n − 1 T v j + ln λ i u X j : ℓ v j ( i ) = i u j = 0 , 1 ,..., n − 1 T v j + ln µ i s i u #( i s → i u ) W + ln µ i u i s #( i u → i s ) W ! . (27) From th e d efinition of weights associated to vertices and e d ges of G , we have that the ab ove expression is e q ual to − m ε i . Also, − ln λ i s D s ( mT W , t ) + ln λ i u D u ( mT W , t ) + ln µ i s i u N i s i u ( mT W , t ) + ln µ i u i s N i u i s ( mT W , t ) ≤ ln λ i u ( t − mT W ) + mn (ln µ i s i u + ln µ i u i s ) : = a ( say) . (28) From (27) and (28), we obtain that the right-hand side of (26) is bound ed ab ove by exp − m ε i + a . Let ϕ i : [ 0 , t ] → R be a fu nction conn e cting (0 , exp ( a ) + T W ), ( r T W , exp( − ( r − 1) ε i + a ) ), ( t , exp( − m ε i + a ) ), r = 1 , 2 , . . . , m , with straigh t line segments. By constru c tion, ϕ i is an upper env elope of T 7→ ψ i ( T ) on [0 , t ] , is co ntinuo u s, dec reasing, and tends to 0 as t → + ∞ . He n ce, ϕ i ∈ L . Recall that i ∈ { 1 , 2 , . . . , N } was selected arbitrarily . It follows th at our assertion holds for all plants i in (1). Remark 15. Our scheduling policy γ is constru cted b y em p loying T -contr activ e cycles o n G . The definition o f the fu n ctions ψ t , i = 1 , 2 , . . . , N clarifies th e association of natural lo garithm with the scalars λ p , p ∈ { i s , i u } an d µ pq , p , q ∈ { i s , i u } in the vertex and edge weights of G , resp ectiv ely , i = 1 , 2 , . . . , N . The use o f ab solute values with ln λ p , p ∈ { i s , i u } , i = 1 , 2 , . . . , N allows for an easy distinctio n between the positive and negative term s in ψ i , i = 1 , 2 , . . . , N . Alternativ ely , one may exclude the absolute values an d keep track of which term s are negati ve in the subsequent analysis. Pr oof o f Pr oposition 1. Let M = 1. Fix a cycle W = v 0 , ( v 0 , v 1 ) , v 1 , . . . , v N − 1 , ( v N − 1 , v 0 ) , v 0 on G tha t satisfies v s k ∩ v s ℓ = ∅ for all k , ℓ = 0 , 1 , . . . , N − 1, l , ℓ . Clear ly , W is a candidate contractive cycle on G . W itho ut loss of gen erality , let us assume that ℓ v i − 1 ( i ) = i s , i = 1 , 2 , . . . , N . Suppose tha t T v j = ˜ T , j = 0 , 1 , . . . , N − 1. By construction of W , the left-han d side o f (11) is − ln λ i s T v i − 1 + ln λ i u N − 1 X j = 0 j , i − 1 T v j + ln µ i s i u + ln µ i u i s = − ln λ i s + ( N − 1) ln λ i u ˜ T + ln µ i s i u + ln µ i u i s , i = 1 , 2 , . . . , N . Since (16) holds, it is possible to choose an in teger ˜ T > 0 such that the above expr ession is strictly less than 0. Pr oof o f Pr oposition 2. Let M ≥ N / 2. Fix a cycle W = v 0 , ( v 0 , v 1 ) , v 1 , ( v 1 , v 0 ) , v 0 on G that satisfies v s 1 ⊃ { 1 , 2 , . . . , N } \ V s 0 . Let j 1 , j 2 , . . . , j M and k 1 , k 2 , . . . , k N − M ∈ { 1 , 2 , . . . , N } be th e elements f or which ℓ v 0 ( j p ) = j p s , p = 1 , 2 , . . . , M and ℓ v 1 ( k q ) = k q s , q = 1 , 2 , . . . , N − M , respectively . W e have | { j 1 , j 2 , . . . , j M }| ≥ | k 1 , k 2 , . . . , k N − M | . It is imm ediate that W is a candidate contractive cycle. 17 Suppose that T v 0 = T v 1 = ˜ T . By con struction of W , we h av e N i s i u , N i u i s ∈ { 0 , 1 } , i = 1 , 2 , . . . , N . The left-hand side o f (1 1) is bou nded ab ove by − ln λ i s + ln λ i u ˜ T + ln µ i s i u + ln µ i u i s . Since condition (17) holds, there e xists ˜ T > 0 such that the above expr ession is strictly less than 0. R eferences [1] S. A l -A reqi , D. G ¨ orges , and S. L iu , Event-based contr ol and schedul ing codesign: stoc hastic and r obust appr oaches , IEE E Transac tions on Automatic Control, 60 (2015), pp. 1291–1303. [2] D. S. B ernstein , Matrix mathematics , Princeton Univ ersity Pre ss, Princeton, NJ, second ed., 2009. Theory , facts, and formulas. [3] B. B ollob ´ as , Mo dern graph theory , vol. 184 of Graduate T exts in Mathematic s, Spri nger-V erl ag, New Y ork, 1998. [4] M. S. B ranicky , Multiple Lyapunov functi ons and other analysis tools for switche d and hybrid systems , IEEE Trans. Automa t. Control, 43 (1998), pp. 475–482. Hybrid control systems. [5] S.-L. D ai , H. L in , and S. S. G e , Scheduling -and-contr ol codesign for a collec tion of network ed contr ol systems with uncertain delays , IEE E Transacti ons on Control Systems T echnology , 18 (2010), pp. 66–78. [6] D. H an , J. W u , Y . M o , an d L. X ie , On stochasti c sensor network sched uling for multiple proc esses , IEEE Tran s. Automat. Control, 62 (2017), pp. 6633–6640. [7] A. H assib i , S. B o yd , and J. H ow , A class of lyapuno v functionals for analyzing hybrid dynamical systems . Proceedi ngs of Am erican Control Conference, 1999, pp. 2455–2460. [8] Q. H e , V . A ngelakis , A. E phremides , and D. Y uan , P olynomial complex ity minimum-time scheduli ng in a class of wirel ess networks , IEEE Tran sactions on Control of Netw . Syst., 3 (2016), pp. 322–331. [9] D. H ristu -V arsakelis , F eedbac k contr ol syste ms as users of a shared network: Communication sequences that guarante e stability . Proceedings of the 40th IEEE Conference on Decision and Control, 200 1, Orlando, Florida, USA, pp. 3631-3636. [10] D. H ristu -V arsakelis , Sho rt-period co mmunicati on and the rol e of zer o-or der hold ing in network ed contr ol systems , IEEE Trans. Automat. Control , 53 (2008), pp . 1285–1290. [11] D. H ristu -V arsakelis and L. Z hang , LQG contr ol of networked contr ol systems with access constraints and delays , Internat. J. Control, 81 (2008), pp. 1266–1280. [12] D. H ristu -V ersakelis , F eedbac k contr ol with communicat ion constra ints. In D. Hristu-V arsak elis, W . S. Levi ne (Eds. ) , Handboo k of network ed and embedded systems, Boston / Basel / B erlin: Birkh ¨ auser , 2005. [13] H. I shii and B. A. F r ancis , Stabilizing a linear system by switching contr ol with dwell time , IEEE Trans. Automat. Control, 47 (2002), pp. 1962–1973. [14] H. K. K halil , Nonlinear Systems , Prentice-Hall , Engle wood Cli ff s, NJ, 2nd ed., 1996. [15] A. K undu , S tabilizi ng sw itc hed nonlinear systems under rest ricted switching . Proceedings of the 21st ACM Internatio nal Conference on Hybrid Systems: Computati on & Control, 2018, Porto, Portugal, pp. 101-110. [16] A. K undu and D. C ha t terjee , Stabilizing discr ete-t ime switc hed linear systems . Proceedings of the 17th ACM Internati onal Conferenc e on Hybrid Systems: Computati on & Control, 2014, Berlin, Germany , pp . 11-20. [17] , On stability of discr ete-ti me swit ched s ystems , Nonlinear Analysis: Hybrid Systems (Special Issue: HS CC), 23 (2017), pp. 191–210. [18] A. S. L eong , S. D ey , and D. E. Q uevedo , Sensor sched uling in variance based event trig ger ed estimation with packet dr ops , IEE E T rans. Automat . Control, 62 (2017), pp. 1880–1895. [19] Y . L i , J. W u , and T . C h en , T ransmit power contr ol and remot e state estimation wi th sensor networks: A ba yesian infere nce approac h , Automati ca, 97 (2018), pp. 292–300. [20] D. L iberzon , Switchin g in syst ems and contr ol , Systems & Control: Foundat ions & Applicati ons, Birkh¨ auser Boston Inc., Boston, MA, 2003. [21] H. L in , G. Z hai , L. F ang , and P . J. A ntsaklis , Stabili ty and h-inf performance pr eserving sched uling policy for network ed contr ol systems . Proc. of the 16th IF A C W orld Congress, 2005, Prague, Czech Republic. [22] S. L ongo , T . S u , G. H ermann , and P . B arber , Optimal and ro bust sche duling for networked contr ol systems , Automation and Control Engineering , CRC Press, 1st ed., 2013. [23] L . M ia o , J. M ao , and C. G. C assandras , Optimal energy -e ffi cient downlink transmission sche duling for real-ti me wirel ess networks , IEEE Trans. Control Netw . Syst., 4 (2017), pp. 692–706. [24] M. A. M ¨ uller and D. L iberzon , Input / output -to-state stability and state-norm estimators for switche d nonlinear systems , Automatic a J. IF AC, 48 (2012), pp. 2029–2039. [25] L . O rihuela , E.G ´ omez -E stern , and F . R. R ubio , Sched uled communication in sensor networks , IEEE Transac tions on Control Systems T echnology , 22 (2014), pp. 801–808. [26] E . G. W . P eters , D. E . Q uevedo , and M. F u , Contr oller and scheduler codesign for feedbac k contr ol over IEE E 802.15.4 networks , IEEE Transact ions on Control Systems T echnology , 24 (2016), pp. 2016–2030. [27] H. R ehbinder and M. S anfridson , Schedulin g of a limited communication c hannel for optimal contr ol , A utomatica, 40 (2004), pp. 491–500. [28] I. S aha , S. B ar uah , and R. M ajumdar , Dynamic schedu ling for ne tworke d con tr ol systems . Proceedings of the 18th AC M Internatio nal Conferenc e on Hybrid S ystems: Computati on & Control, 2015, Seattle, W ashington, pp. 98-107. [29] M. A. S id , S. C hira ganti , and K. C habir , Medium access scheduli ng for input recon struction under decept ion attac ks , Journal of the Franklin Institute, 354 (2017), pp. 3678–3689. [30] S. W en and G. G uo , Contr ol and resour ce allocat ion of cyber-ph ysical systems , IET Control T heory & Applicatio ns, 10 (2016), pp. 2038–2048. [31] L . Z hang and D. H ristu -V arsakelis , Communicatio n and con tr ol co-design for network ed contr ol systems , Automa tica J. IF A C, 42 (200 6), pp. 953– 958.
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment