Discrete-Time Polar Opinion Dynamics with Susceptibility
This paper considers a discrete-time opinion dynamics model in which each individual's susceptibility to being influenced by others is dependent on her current opinion. We assume that the social network has time-varying topology and that the opinions…
Authors: Ji Liu, Mengbin Ye, Brian D.O. Anderson
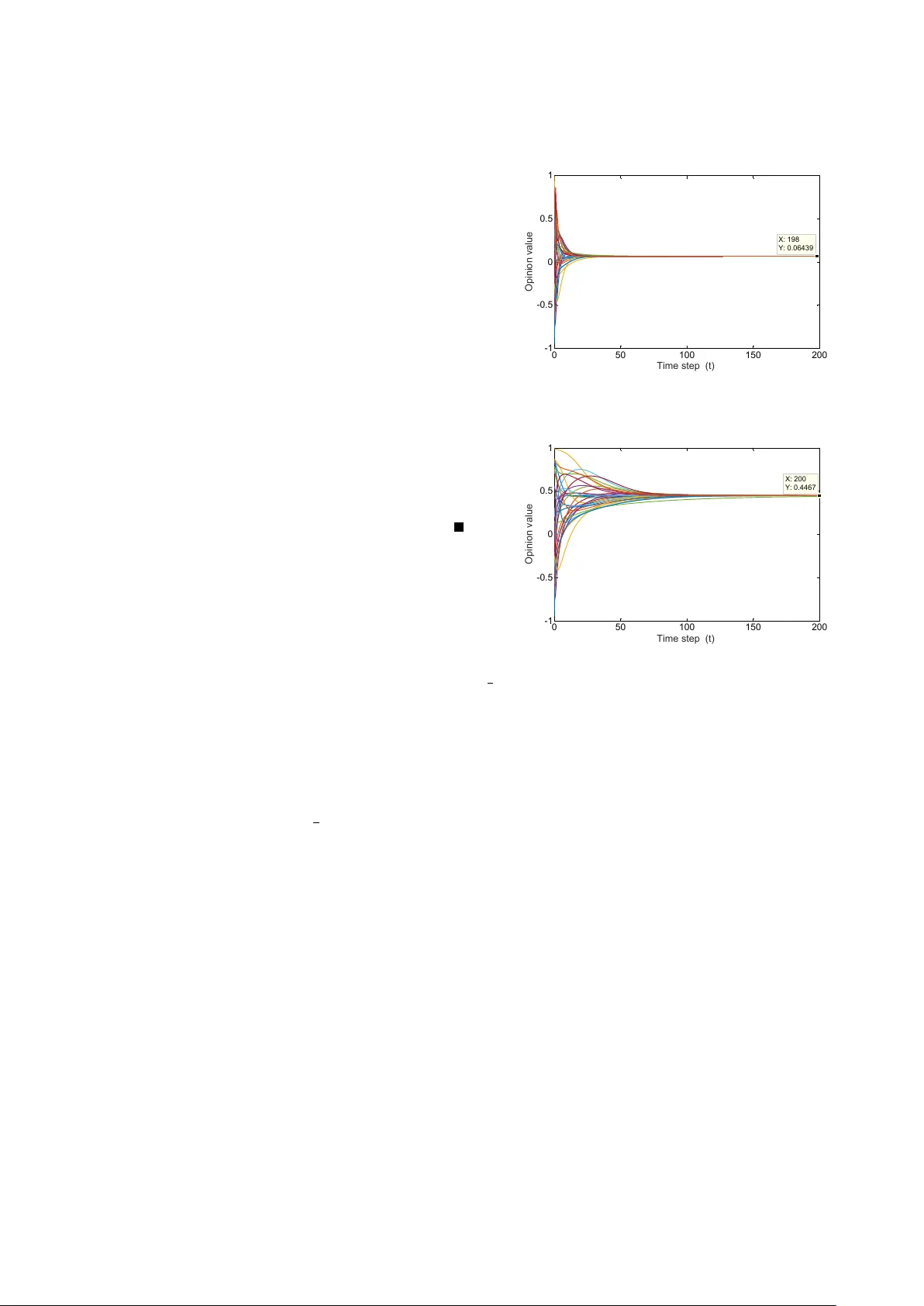
Discr ete-T ime P olar Opinion Dynamics with Susceptibility Ji Liu, Mengbin Y e, Brian D.O. Anderson, T amer Bas ¸ ar , Angelia Nedi ´ c Abstract — This paper considers a discr ete-time opinion dy- namics model in which each individual’ s susceptibility to being influenced by others is dependent on her current opinion. W e assume that the social network has time-varying topology and that the opinions are scalars on a continuous inter val. W e first pr opose a general opinion dynamics model based on the DeGr oot model, with a general function to describe the functional dependence of each individual’ s susceptibility on her own opinion, and show that this general model is analogous to the Friedkin-Johnsen model, which assumes a constant susceptibility for each individual. W e then consider two specific functions in which the individual’ s susceptibility depends on the polarity of her opinion, and provide motivating social examples. First, we consider stubborn positives, who hav e reduced susceptibility if their opinions are at one end of the interval and increased susceptibility if their opinions are at the opposite end. A court jury is used as a motivating example. Second, we consider stubborn neutrals, who hav e reduced susceptibility when their opinions ar e in the middle of the spectrum, and our moti vating examples are social networks discussing established social norms or institutionalized behavior . For each specific susceptibility model, we establish the initial and graph topology conditions in which consensus is reached, and develop necessary and sufficient conditions on the initial conditions for the final consensus value to be at either extr eme of the opinion inter val. Simulations ar e provided to sho w the effects of the susceptibility function when compared to the DeGroot model. I . I N T RO D U C T I O N The problem of opinion dynamics, which considers ho w an individual’ s opinion forms and e volv es through interactions with others in a social network, has been widely studied in the social sciences for decades. The classical discrete-time DeGroot model, in which each individual updates her opinion by taking a con ve x combination of the opinions of her neighbors at each time step, is perhaps one of the most well known models [1]. This model is closely related to discrete- time linear consensus algorithms, which have been heav- ily studied in multi-agent coordination literature [2]–[11]. Since the time the DeGroot model was proposed, numerous This research was supported in part by ONR MURI Grant N00014- 16-1-2710, and in part by the Australian Research Council under grants DP-130103610 and DP-160104500, and Data61-CSIRO. J. Liu is with the Department of Electrical and Computer Engineering at Stony Brook Uni versity ( ji.liu@stonybrook.edu ). M. Y e is with the Research School of Engineering at Australian National University , and supported by an Australian Go vernment Research Training Program (R TP) Scholarship ( mengbin.ye@anu.edu.au ). B.D.O. Anderson is with the Research School of Engineering, Australian National Uni ver- sity ( Brian.Anderson@anu.edu.au ), Hangzhou Dianzi Univ ersity , Hangzhou, China, and Data61-CSIR O (formerly NICT A Ltd.) in Canberra, A.C.T ., Australia. T . Bas ¸ar is with the Coordinated Science Laboratory at Univ ersity of Illinois at Urbana-Champaign ( basar1@illinois.edu ). A. Nedi ´ c is with the School of Electrical, Computer and Energy Engineering at Arizona State Univ ersity ( angelia.nedich@asu.edu ). other models ha ve been introduced, in both continuous- and discrete-time setting. These v arious models, which describe the opinion formation process in the context of different social cogniti ve processes, all attempt to understand the formation and ev olution of opinions in social networks of all sizes, and explain observed social phenomena such as polarization or attitude extremity [12]–[15], and subculture formation [16], [17]. There are many variants of the DeGroot model for opinion dynamics. The Altafini model, which suggests the interac- tions between individuals can be cooperative or antagonistic, has been studied as a discrete-time process in [18]–[21], and the continuous-time counterpart has been considered in [22]–[25]. It is notable because the model links the limiting opinion behavior with the structural balance of the graph representing the social network. Some other models primarily focus on linking the limiting opinion behavior with a social process. F or example, the Hegselmann-Krause model shows the social cogniti ve process of homophily is linked to fact that opinions in the social network e ventually form clusters [26]–[28]. It was shown in [16] that an indi vidual’ s desire to striv e for uniqueness generated persistent subcultures which formed and v anished ov er time. On the other hand, an individual conforming to a social norm generated pluralistic ignorance [17]. Finally , some models attempt to link final opinion beha vior to a combination of social processes and the underlying network structure. The Friedkin-Johnsen model [29], [30] considered individual susceptibility to influence and shows that opinions reach a persistent di versity under general graph structures. The DeGroot-Friedkin model [31] studied an individual’ s ability to reflect on her impact in the opinion formation process, and showed her social power depended on the graph structure. A ke y aspect of the DeGroot model is the interpersonal influence, which describes the amount of influence each individual’ s neighbors hav e in determining that individual’ s new opinion. Some of the results consider arbitrary , time- varying interpersonal influence, e.g. [6], [19], [24]. How- ev er, many of the aforementioned models consider influence determined by a social process, e.g. homophily [28], social distancing [16], [17], conformity [17], desire for uniqueness [16], biased assimilation [32], or reflected self-appraisal [31]. Because the social process is often dependent on the states, i.e. opinions (which change with time), then necessarily the interpersonal influences are state-dependent, and thus time- varying. In a recent paper [33], a continuous-time model has been proposed for fixed social network topology which considers, separately , three dif ferent cogniti ve processes to driv e the influence change. In [33], the term “polar opinion dynamics” relates to the fact that the lev el of influence is dependent on how extreme, i.e. polar, an individual’ s opinion is. In this paper, we study a discrete-time opinion dynamics model where an individual’ s susceptibility to influence is dependent on her current opinion, and allo w the social network topology to vary ov er time. W e first propose a general model, show it can be considered as a generalization of both the DeGroot model and the Friedkin-Johnsen model [29], [30], and establish some general properties of the model. W e then in vestigate discrete-time versions of two of the three cognitiv e process introduced in [33], bearing in mind that discrete-time models are more appropriate to describe opinion dynamics, at least from the point that individuals change their minds from time to time, instead of continuously . In addition, we provide social examples from existing literature to moti vate these susceptibility functions. For each function, we provide sufficient conditions on the graph topology and initial opinions for the social network to reach a consensus. Importantly , we establish necessary and sufficient conditions for the social network to hold opinions at either extremes of the opinion interval, whereas [33] provided only suf ficient conditions, or no conditions at all for extremity of the final consensus in the continuous-time model. Lastly , it turns out that while some of the limiting behaviors are similar to the continuous-time model, in other cases, the limiting beha viors are not the same. The remainder of this paper is organized as follows. Some notations and preliminaries are introduced in Section I-A. In Section II, the discrete-time polar opinion dynamics model with susceptibility is introduced. The main results of the paper are presented in Section III, which are illustrated and compared with the DeGroot model via simulations in Section IV. The paper ends with some concluding remarks in Section V. A. Pr eliminaries For any positiv e integer n , we use [ n ] to denote the index set { 1 , 2 , . . . , n } . W e view vectors as column vectors and write x > to denote the transpose of a vector x . For a vector x , we use x i to denote the i th entry of x . For any matrix M ∈ R n × n , we use m ij to denote its ij th entry . A nonnegati ve n × n matrix is called a stochastic matrix if its ro w sums are all equal to 1 . W e use 0 and 1 to denote the vectors whose entries all equal 0 and 1, respectively , and I to denote the identity matrix, while the dimensions of the vectors and matrices are to be understood from the context. For any real number x , we use | x | to denote the absolute value of x . For any two real vectors a, b ∈ I R n , we write a ≥ b if a i ≥ b i for all i ∈ [ n ] , a > b if a ≥ b and a 6 = b , and a b if a i > b i for all i ∈ [ n ] . For an y two sets A and B , we use A \ B to denote the set of elements in A b ut not in B . The graph of an n × n matrix M with real-v alued entries is an n -verte x directed graph defined so that ( i, j ) is an arc from verte x i to verte x j in the graph whenev er the j i th entry of M is nonzero. W e will use the terms “indi vidual” and “agent” interchangeably . I I . T H E G E N E R A L M O D E L In this section, we propose a general model for describing opinion dynamics where each individual’ s susceptibility to being influenced by others is af fected by some social process, and giv e some results on the trajectories of the opinions. In the next section, we shall propose two specific models to describe two different variants of a social process. Consider a social network of n > 1 agents, labeled 1 through n , discussing opinions on a giv en topic. 1 Each agent i can only learn, and be influenced by , the opinions of certain other agents called the neighbors of agent i . Neighbor relationships among the n agents are described by a directed graph N ( t ) , called the neighbor graph, which may change ov er time. Agent j is a neighbor of agent i at time t whenev er ( j, i ) is an arc in N ( t ) . Thus, the directions of arcs indicate the directions of information flow (specifically opinion flow). For con venience, we assume that each agent is always a neighbor of herself. Thus, N ( t ) has self-arcs at all n vertices for all time t . Each agent i has control ov er a real-valued quantity x i , called agent i ’ s opinion. In the time-varying DeGroot model 2 , each agent i updates her opinion at each discrete time t ∈ { 1 , 2 , . . . } by setting x i ( t + 1) = X j ∈N i ( t ) w ij ( t ) x j ( t ) , i ∈ [ n ] , (1) where N i ( t ) denotes the set of neighbors of agent i at time t including i herself, and w ij ( t ) are positive influence weights satisfying P j ∈N i ( t ) w ij ( t ) = 1 for all i ∈ [ n ] and time t . W e assume that the weights w ij ( t ) change in a manner which is entirely independent of x k ( t ) , ∀ k ∈ [ n ] . W e rewrite the abov e model as x i ( t + 1) = x i ( t ) + X j ∈N i ( t ) w ij ( t ) x j ( t ) − x i ( t ) = x i ( t ) + X j ∈N i ( t ) w ij ( t ) ( x j ( t ) − x i ( t )) , with the second equality obtained by noting that P j ∈N i ( t ) w ij ( t ) = 1 , and define u i ( t ) = X j ∈N i ( t ) w ij ( t ) ( x j ( t ) − x i ( t )) . Then, u i ( t ) represents the influence of agent i ’ s neighbors, which generates a change in the opinion of agent i , i.e. u i ( t ) can be vie wed as the control input of agent i at time t . W e now suppose that agent i may not fully accept the influence of her neighbors, and her openness to influence, or susceptibility , is captured by the real-valued function f i ( x i ( t )) . W e make the follo wing assumption on f i ( x i ( t )) : Assumption 1: The susceptibility function f i ( x i ( t )) takes on values in [0 , 1] . 1 The purpose of labeling of the agents is only for con venience. W e do not require a global labeling of the agents in the network. W e only assume that each agent can identify her own neighbors. 2 The original DeGroot model was proposed for a fixed graph [1]. Subsequent results expanded this to time-varying graphs, e.g. [3], [6]. W e consider the following model for opinion dynamics with susceptibility: x i ( t + 1) = x i ( t ) + f i ( x i ( t )) X j ∈N i ( t ) w ij ( t ) ( x j ( t ) − x i ( t )) . (2) If at time t f i ( x i ( t )) = 1 , agent i fully accepts her neighbors’ influence at time t , and the model reduces to the DeGroot model. In the case when f i ( x i ( t )) = 0 , agent i will ignore her neighbors and not change her opinion at time t ; in such a case, the agent is sometimes called stubborn [29], [34]. It is w orth emphasizing that an agent’ s susceptibility function depends on its current opinion, i.e. state. This is consistent with the many works discussed in the introduction, which considers social cognitive processes which are dependent on the individual’ s opinion and, in some instances, the opinions of her neighbor . There is also another interpretation of the model. Inspired by the Friedkin-Johnsen model [29], [30], [35], we assume that each agent i updates her opinion as a con vex combi- nation of her o wn opinion and the weighted average of her neighbors’ opinions; 3 specifically , x i ( t + 1) = λ i X j ∈N i ( t ) w ij ( t ) x j ( t ) + (1 − λ i ) x i ( t ) , (3) where the constant λ i ∈ [0 , 1] is agent i ’ s susceptibility or openness to being influenced by her neighbors’ opinions. Let us replace λ i with the state-dependent susceptibility function f i ( x i ( t )) . It follows that x i ( t + 1) = f i ( x i ( t )) X j ∈N i ( t ) w ij ( t ) x j ( t ) + (1 − f i ( x i ( t ))) x i ( t ) (4) = x i ( t ) − f i ( x i ( t )) x i ( t ) − X j ∈N i ( t ) w ij ( t ) x j ( t ) = x i ( t ) − f i ( x i ( t )) X j ∈N i ( t ) w ij ( t ) ( x i ( t ) − x j ( t )) = x i ( t ) + f i ( x i ( t )) u i ( t ) , which is the same as (2). Remark 1: W e note here that there are two types of time- dependency in the influence term u i ( t ) . Firstly , we have as- sumed that the influence weights w ij ( t ) may be time-varying but state-independent. This may occur in situations where an individual decides to at time t , stop sharing her opinion, stop listening to certain neighbors, start listening to other neighbors, or adjust weight magnitudes (perhaps by becom- ing more persuasi ve) etc. This differs from the continuous- time work in [33], which considered static influence weights. The second is time-dependency arising from the fact that the susceptibility of individual i , f i ( x i ( t )) , is state-dependent. In the Friedkin-Johnsen model, susceptibility w as assumed to be constant. While some papers hav e studied state-dependent 3 In the Friedkin-Johnsen model, x i ( t ) of the second term on the right of (3) is replaced by x i (0) . susceptibility in discrete-time models, the y provide only simulations, and hav e not provided rigorous analysis or considered time-varying influence weights w ij ( t ) [17]. In this paper, we assume that all the initial opinions x i (0) , i ∈ [ n ] , lie in the interval [ − 1 , 1] , where − 1 and 1 represent the extreme positive and negativ e opinions, respectiv ely . Such a scaling is typical in opinion dynamics problems where x i may represent individual i ’ s attitude towards an idea, e.g. the legalization of recreational marijuana, with x i = 1 maximally supporti ve and x i = − 1 maximally opposing. The following lemma shows that [ − 1 , 1] is an in v ariant set of each agent’ s opinion dynamics gi ven by (2). Lemma 1: Suppose that each agent i follows the update rule (2) and that x i (0) ∈ [ − 1 , 1] for all i ∈ [ n ] . Then, x i ( t ) ∈ [ − 1 , 1] for all i ∈ [ n ] and time t . Pr oof: From (4) and the assumption that f i ( x i ( t )) ∈ [0 , 1] , each agent i ’ s updated value x i ( t + 1) is a con vex combination of x i ( t ) and P j ∈N i ( t ) w ij ( t ) x j ( t ) ; i.e. a con ve x combination of the current opinions of her neighbors. Using induction, it is easy to see that if x i (0) ∈ [ − 1 , 1] for all i ∈ [ n ] , it follo ws that x i ( t ) ∈ [ − 1 , 1] for all i ∈ [ n ] and time t . This sho ws that indi vidual i ’ s opinion will remain bounded from abo ve and below , and ensures that an individual’ s opinion cannot become increasingly extreme in either the positiv e or negati ve direction. More can be said about the most extreme opinions in the social network. Specifically , the most negati ve and positi ve opinions will ne ver become more negati ve and more positive, respectiv ely . Lemma 2: Suppose that each agent i follows the update rule (2). Then, x min ( t ) = min i x i ( t ) is nondecreasing and x max ( t ) = max i x i ( t ) is nonincreasing as t increases. Pr oof: From (2), it follo ws that x i ( t + 1) = x i ( t ) + f i ( x i ( t )) X j ∈N i ( t ) w ij ( t ) x j ( t ) − x i ( t ) = (1 − f i ( x i ( t ))) x i ( t ) + f i ( x i ( t )) X j ∈N i ( t ) w ij ( t ) x j ( t ) The abov e set of n equations can be combined into state form. T oward this end, let x ( t ) be the vector in I R n whose i th entry equals x i ( t ) , F ( x ( t )) be the n × n diagonal matrix whose i th diagonal entry equals f i ( x i ( t )) with 0 ≤ f i ≤ 1 , and W ( t ) be the n × n matrix whose ij th entry equals w ij ( t ) . Then, it follows that x ( t + 1) = ( I − F ( x ( t ))) x ( t ) + F ( x ( t )) W ( t ) x ( t ) = S ( x ( t ) , t ) x ( t ) , (5) where S ( x ( t ) , t ) = I − F ( x ( t )) + F ( x ( t )) W ( t ) . It is worth noting that S ( x ( t ) , t ) is a function of x ( t ) as F ( x ( t )) is so. Thus, (5) is a nonlinear system. From Lemma 1 and Assumption 2, S ( x ( t ) , t ) is a nonnegati ve matrix for all time t . Since W ( t ) is a stochastic matrix, it follows that S ( x ( t ) , t ) 1 = ( I − F ( x ( t )) + F ( x ( t )) W ( t )) 1 = 1 − F ( x ( t )) 1 + F ( x ( t )) 1 = 1 , which implies that S ( x ( t ) , t ) is a stochastic matrix for all time t . Thus, each x i ( t + 1) is a con vex combination of all x i ( t ) , i ∈ [ n ] , which implies that x min ( t ) = min i x i ( t ) is nondecreasing and x max ( t ) = max i x i ( t ) is nonincreasing as t increases. W e also impose the following set of assumptions on the weights w ij ( t ) throughout the rest of the paper . Assumption 2: For all i ∈ [ n ] and t , there hold w ij ( t ) > 0 if j ∈ N i ( t ) and w ij ( t ) = 0 otherwise. There exists a positiv e number β such that, for all i ∈ [ n ] and j ∈ N i ( t ) , if w ij 6 = 0 , then w ij ≥ β . For all i ∈ [ n ] and t , there holds P j ∈N i ( t ) w ij ( t ) = 1 . Such a set of assumptions implies that W ( t ) = [ w ij ( t )] is a stochastic matrix for all time t , and was widely used in the DeGroot (and consensus) studies [11]. For the (time-varying) DeGroot model (1), we have a standard result, which we state after first defining some connectivity conditions for time- varying graphs. A directed graph G is str ongly connected if there is a directed path between each pair of its distinct ver - tices. W e say that a finite sequence of directed graphs G 1 , G 2 , . . . , G m with the same vertex set is jointly strongly connected if the union 4 of the directed graphs in this sequence is strongly connected. W e say that an infinite sequence of directed graphs G 1 , G 2 , . . . with the same verte x set is r epeatedly jointly strongly connected if there exist positi ve integers p and q for which each finite se- quence G q + k p , G q + k p +1 , . . . , G q +( k +1) p − 1 , k ≥ 0 , is jointly strongly connected. Repeatedly jointly strongly connected graphs are equi valent to so-called “ B -connected” graphs in the consensus literature [36] whose definition is in a slightly different form. Pr oposition 1: (Theorem 2 in [11]) Suppose that As- sumption 2 holds. If the sequence of neighbor graphs N (1) , N (2) , . . . is repeatedly jointly strongly connected 5 , then all x i ( t ) , i ∈ [ n ] , in (1) will reach a consensus exponentially fast as t → ∞ for all initial conditions. It is worth noting that for each time t , neighbor graph N ( t ) is the same as the graph of weight matrix W ( t ) = [ w ij ( t )] . W e will use this result in our analysis of the model (2). I I I . S U S C E P T I B I L I T Y F U N C T I O N S In this section, we will consider two specific susceptibil- ity functions, and study the behavior of the corresponding models. W e gi ve motiv ating examples from sociology for the susceptibility functions taking on these specific forms. 4 The union of a finite sequence of directed graphs with the same vertex set is a directed graph with the same vertex set and the arc set which is the union of the arc sets of all directed graphs in the sequence. 5 The result still holds if N (1) , N (2) , . . . is repeatedly jointly rooted [10]. A. Stubborn P ositives W e begin with the case where f i ( x i ( t )) = 1 2 (1 − x i ( t )) , for all i ∈ [1] . An agent which has this susceptibility function is called a stubborn positive. Motivation: Note here that for stubborn positiv e agents, her susceptibility decreases as x i → 1 , and increases as x i → − 1 . In other words, the closer the agent is to a “pos- itiv e opinion” (respectiv ely a “negati ve opinion”), the more stubborn or unwilling (respectively more open or susceptible) she is to changing her opinion. Our motiv ating example is a jury panel. The paper [37] conducted extensi ve surveys of criminal juries after trials were complete. A clear pattern was observed: a juror was more lik ely to be extremely stubborn when believing the defendant should be acquitted, than when believing the defendant should be con victed. In our context, a juror with x i = 1 is maximally supportive of acquitting the defendant, while a juror with x i = − 1 is maximally opposing acquittal (and thus supporti ve of con victing) 6 . It was suggested that this asymmetric stubbornness arose from the fact that a false con viction carried an enormous amount of consequence for defendants in criminal cases, e.g. a prison sentence. In summary , scenarios which in volve social networks with stubborn positives can arise in discussions where the outcome for one result has drastically dif ferent sev erity of consequences compared to the opposite result. Analysis: In this case, from (2), each agent i updates her opinion by setting x i ( t + 1) = x i ( t ) + 1 2 (1 − x i ( t )) X j ∈N i ( t ) w ij ( t ) ( x j ( t ) − x i ( t )) = x i ( t ) + 1 2 (1 − x i ( t )) X j ∈N i ( t ) w ij ( t ) x j ( t ) − x i ( t ) = 1 2 (1 + x i ( t )) x i ( t ) + 1 2 (1 − x i ( t )) X j ∈N i ( t ) w ij ( t ) x j ( t ) . (6) It follows that x ( t + 1) = 1 2 ( I + X ( t )) x ( t ) + 1 2 ( I − X ( t )) W ( t ) x ( t ) = 1 2 ( I + X ( t )) + 1 2 ( I − X ( t )) W ( t ) x ( t ) , (7) where X ( t ) is the n × n diagonal matrix whose i th diagonal entry equals x i ( t ) . The following theorem characterizes the limiting behavior of system (7). Theor em 1: Suppose that Assumption 2 holds and that the sequence of neighbor graphs N (1) , N (2) , . . . is repeatedly jointly strongly connected. If x i (0) < 1 for all i ∈ [ n ] , then all x i ( t ) , i ∈ [ n ] , in (6) will reach a consensus exponentially 6 W e note here that this is the opinion of the juror, as opposed to the final action taken by the juror . An individual may priv ately take one opinion and express another due to the social circumstances [38]. fast at some v alue in the interval [ − 1 , 1) ; moreo ver , in this case, the consensus value equals − 1 if, and only if, x i (0) = − 1 for all i ∈ [ n ] . If x i (0) = 1 for at least one i ∈ [ n ] , then all x i ( t ) , i ∈ [ n ] , in (6) will reach a consensus at value 1 . Pr oof: From (7), x ( t + 1) = S ( x ( t ) , t ) x ( t ) where S ( x ( t ) , t ) = 1 2 ( I + X ( t )) + 1 2 ( I − X ( t )) W ( t ) . (8) From the proof of Lemma 2, S ( x ( t ) , t ) is a stochastic matrix for all time t . First suppose that x i (0) < 1 for all i ∈ [ n ] . There must exist a positiv e number α such that x i (0) ≤ 1 − α for all i ∈ [ n ] . It follows from Lemma 2 that x i ( t ) ≤ 1 − α for all i ∈ [ n ] and time t . From (8), we obtain the follo wing two inequalities for s ij ( t ) , the entries of S ( x ( t ) , t ) . For each diagonal entry , s ii ( t ) = 1 2 (1 + x i ( t )) + 1 2 (1 − x i ( t )) w ii ( t ) ≥ 1 2 (1 − x i ( t )) w ii ( t ) ≥ 1 2 αβ , where the last inequality makes use of Assumption 2 and the fact that we assumed every node in N ( t ) has a self-loop, for all t . For each off-diagonal entry , s ij ( t ) = 1 2 (1 − x i ( t )) w ij ( t ) . Thus, s ij ( t ) is nonzero if and only if w ij ( t ) is nonzero (because 1 − x i ( t ) ≥ α > 0 ), which implies that the graph of S ( x ( t ) , t ) has the same edge and verte x set (b ut with different edge weights) as the graph of W ( t ) , as well as neighbor graph N ( t ) . Moreover , it can be seen that when s ij ( t ) > 0 , it must hold that s ij ( t ) ≥ 1 2 αβ . From Proposition 1, all x i ( t ) , i ∈ [ n ] , will reach a consensus exponentially fast. Since − 1 ≤ x i ( t ) ≤ 1 − α for all i ∈ [ n ] and time t , the consensus value must lie in [ − 1 , 1) . Next we show that all x i ( t ) , i ∈ [ n ] , in (6) will reach a consensus at v alue − 1 if and only if x i (0) = − 1 for all i ∈ [ n ] . Suppose that, to the contrary , there exists at least one i ∈ [ n ] such that x i (0) > − 1 . From (6), since x j ( t ) ≥ − 1 for all j ∈ N i ( t ) , there holds x i ( t + 1) ≥ 1 2 (1 + x i ( t )) x i ( t ) − 1 2 (1 − x i ( t )) . Suppose that x i ( t ) > − 1 . Then, it follo ws that x i ( t + 1) > − 1 2 (1 + x i ( t )) − 1 2 (1 − x i ( t )) = − 1 , which implies that if x i (0) > − 1 , then x i ( t ) > − 1 for all t . Let S ( t ) denote the set of agents whose opinions are greater than − 1 at time t . From the hypothesis and preceding discussion, S ( t ) is nonempty for all time t . Let ¯ S ( t ) = [ n ] \ S ( t ) be the set of agents whose opinions equal − 1 at time t . If ¯ S ( t ) is empty , i.e., x i (0) > − 1 for all i ∈ [ n ] , then from Lemma 2, the system cannot reach a consensus at − 1 . Suppose that ¯ S ( t ) is nonempty , i.e., there exists at least one agent whose initial opinion is − 1 . Since the sequence of neighbor graphs is repeatedly jointly strongly connected, there must exist a finite time τ and an agent j ∈ ¯ S ( τ ) such that it has a neighbor k ∈ S ( τ ) , i.e., x j ( τ ) = − 1 and x k ( τ ) > − 1 with k ∈ N j ( τ ) . From (6), it can be seen that x j ( τ + 1) > − 1 . Using the same arguments, there exists a finite time ¯ τ such that x i ( ¯ τ ) > − 1 for all i ∈ [ n ] , which contradicts the hypothesis that all x i ( t ) , i ∈ [ n ] , will reach a consensus at − 1 . Therefore, the consensus at − 1 will be reached if and only if x i (0) = − 1 for all i ∈ [ n ] . Now we consider the case when x i (0) = 1 for at least one i ∈ [ n ] . Consider the L yapunov function V ( x ( t )) = 1 − min i ∈ [ n ] x i ( t ) . From (6), if x i ( t ) = 1 , then x i ( t + 1) = 1 , which implies that if x i (0) = 1 , then x i ( t ) = 1 for all time t . Thus, if x i ( t ) = 1 for all i ∈ [ n ] at some time t , then V ( x ( t )) = 0 and V ( x ( t + 1)) = 0 . Suppose that there exists at least one agent i such that x i ( t ) < 1 at a specific time t . In this case, min i ∈ [ n ] x i ( t ) < 1 and thus V ( x ( t )) > 0 . From Lemma 2, there holds x j ( τ ) ≥ min i ∈ [ n ] x i ( t ) for all j ∈ [ n ] and τ ≥ t . Let M ( t ) be the set of agents whose opinions are the smallest at time t , i.e., x j ( t ) = min i ∈ [ n ] x i ( t ) for each j ∈ M ( t ) . Since x i (0) = 1 for at least one i ∈ [ n ] , it follo ws that [ n ] \ M ( t ) is nonempty for all t . Since the sequence of neighbor graphs is repeatedly jointly strongly connected, there must exist a finite time τ ≥ t and an agent j ∈ M ( τ ) such that it has a neighbor k / ∈ M ( τ ) , i.e., x k ( τ ) > x j ( τ ) with k ∈ N j ( τ ) (else the agents of ∪ ∞ t ≥ 0 M ( t ) would induce a disconnected subgraph, which contradicts the repeatedly jointly strongly connected nature of the neighbor graphs). From (6), it can be seen that x j ( τ + 1) > x j ( τ ) . Using the same arguments, there must exist a finite time ¯ τ > t such that min i ∈ [ n ] x i ( ¯ τ ) > min i ∈ [ n ] x i ( t ) , which implies that V ( x ( ¯ τ )) < V ( x ( t )) . Therefore, x i ( t ) will con verge to 1 for all i ∈ [ n ] . Theorem 1 implies that system (7) will reach a consensus for any initial condition. Necessary and sufficient conditions for the two extreme opinions are also giv en. Specifically , the consensus will be reached at − 1 if and only if x (0) = − 1 , and at 1 if and only if x (0) 1 does not hold. Remark 2: The discrete-time model with stubborn posi- tiv es has the same limiting behavior as the continuous-time model considered in [33]. W e consider the general time- varying case whereas only the time-inv ariant case was stud- ied in [33]. Moreov er , we establish necessary and suf ficient conditions for the two extreme opinions, i.e., − 1 and 1 , whereas only consensus to 1 w as studied in [33]. Remark 3: W e now compare the discrete-time model with stubborn positiv es (6) with the original DeGroot model (1) for the case in which the neighbor graph does not change ov er time and is a strongly connected graph N . Thus, the corresponding weight matrix W is also time-in v ariant. Since N is strongly connected, W is irreducible. It is well kno wn that in this case, all x i ( t ) , i ∈ [ n ] , in the DeGroot model will reach a consensus at value c > x (0) , where c > is the unique left eigen vector of W associated with eigen value 1 which satisfies c > 1 = 1 ; moreover , c 0 . Therefore, as long as there exists at least one agent i for which x i (0) < 1 , all the agents will not reach a consensus at value 1 . This is a significant dif ference from the model (6) in which as long as at least one agent has initial opinion at 1 , all the agents’ opinions will conv erge to 1 . B. Stubborn Neutrals Now we consider the case where each indi vidual has susceptibility function f i ( x i ( t )) = x i ( t ) 2 . W e call such an individual a stubborn neutral. Motivation: Observe that for stubborn neutral agents, her susceptibility to being influenced decreases as x i → 0 , and increases as x i → ± 1 . This means that the closer the individual’ s opinion is to “neutral”, i.e. x i = 0 , the more stubborn she becomes. In networks with stubborn neutrals, we consider the neutral opinion as an established, socially normativ e opinion. For an illustrativ e example, suppose that the topic was on the level of environmental regulations, e.g. for nuclear power . Then x i = 0 represents individual i fa voring the maintaining of the status quo, x i = 1 represents fa voring increasing regulation, and x i = − 1 represents fa voring of decreasing regulation. Some literature showed that pressures existed on individuals in a social network to conform with the group norm [38], [39], with de viants being punished [40] or receiving additional pressure to conform [41]. Merei sho wed in [42] that established traditions heav- ily influenced the behavior of individuals despite a strong leader attempting to influence change. In the context of our paper , tradition is x = 0 and the leader is an indi vidual i with x i (0) = ± 1 , and with w j i large, for any individual j who listens to the leader . Lastly , institutionalization has been linked to the persistence of cultures and resistance to changing the status quo [43]. In summary , stubborn neutrals may occur in social networks where indi viduals are reluctant to change from the established norm because of associated risks, or due to institutionalization, or because of pressure to conform. Analysis: In this case, from (2), each agent i updates her opinion by setting x i ( t + 1) = x i ( t ) + x i ( t ) 2 X j ∈N i ( t ) w ij ( t ) ( x j ( t ) − x i ( t )) = x i ( t ) + x i ( t ) 2 X j ∈N i ( t ) w ij ( t ) x j ( t ) − x i ( t ) = x i ( t ) − x i ( t ) 3 + x i ( t ) 2 X j ∈N i ( t ) w ij ( t ) x j ( t ) . (9) Then, it follows that x ( t + 1) = I − X ( t ) 2 + X ( t ) 2 W ( t ) x ( t ) . (10) The following theorem characterizes some limiting behavior of system (10). Theor em 2: Suppose that Assumption 2 holds and that the sequence of neighbor graphs N (1) , N (2) , . . . is repeatedly jointly strongly connected. If x i (0) > 0 for all i ∈ [ n ] , then all x i ( t ) , i ∈ [ n ] , in (9) will reach a consensus exponentially fast at some value in the interv al (0 , 1] ; moreover , in this case, the consensus value equals 1 if, and only if, x i (0) = 1 for all i ∈ [ n ] . If x i (0) < 0 for all i ∈ [ n ] , then all x i ( t ) , i ∈ [ n ] , in (9) will reach a consensus exponentially fast at some value in the interv al [ − 1 , 0) ; moreov er , in this case, the consensus v alue equals − 1 if, and only if, x i (0) = − 1 for all i ∈ [ n ] . Pr oof: From (10), x ( t + 1) = S ( x ( t ) , t ) x ( t ) where S ( x ( t ) , t ) = I − X ( t ) 2 + X ( t ) 2 W ( t ) . (11) From the proof of Lemma 2, S ( x ( t ) , t ) is a stochastic matrix for all time t . First suppose that x i (0) > 0 for all i ∈ [ n ] . There must exist a positiv e number α such that x i (0) ≥ α for all i ∈ [ n ] . It follows from Lemma 2 that x i ( t ) ≥ α for all i ∈ [ n ] and time t . From (11), we obtain the following two inequalities for s ij ( t ) , the entries of S ( x ( t ) , t ) . For each diagonal entry , s ii ( t ) = 1 − x i ( t ) 2 + x i ( t ) 2 w ii ( t ) ≥ x i ( t ) 2 w ii ( t ) ≥ α 2 β , where the last inequality makes use of Assumption 2 and the fact that we assumed every node in N ( t ) has a self-loop, for all t . For each off-diagonal entry , s ij ( t ) = x i ( t ) 2 w ij ( t ) . Thus, s ij ( t ) is nonzero if and only if w ij ( t ) is nonzero, which implies that the graph of S ( x ( t ) , t ) is the same as the graph of W ( t ) , as well as neighbor graph N ( t ) . Moreov er, it can be seen that when s ij ( t ) > 0 , it must hold that s ij ( t ) ≥ α 2 β . From Proposition 1, all x i ( t ) , i ∈ [ n ] , will reach a consensus exponentially fast. Since x i ( t ) ≥ α for all i ∈ [ n ] and time t , the consensus v alue must lie in (0 , 1] . Next we show that all x i ( t ) , i ∈ [ n ] , in (9) will reach a consensus at value 1 if and only if x i (0) = 1 for all i ∈ [ n ] . Suppose that, to the contrary , there exists at least one i ∈ [ n ] such that 0 < x i (0) < 1 . From (9), since x j ( t ) ≤ 1 for all j ∈ N i ( t ) implies P j ∈N i ( t ) w ij ( t ) x j ( t ) ≤ 1 , there holds x i ( t + 1) ≤ x i ( t ) − x i ( t ) 3 + x i ( t ) 2 . It can be verified that x i ( t ) − x i ( t ) 3 + x i ( t ) 2 increases as x i ( t ) increases when x i ( t ) ∈ ( − 1 3 , 1) and assumes the value 1 at x i ( t ) = 1 . Suppose that 0 < x i ( t ) < 1 . Then, it follows that x i ( t + 1) < 1 , which implies that if x i (0) < 1 , then x i ( t ) < 1 for all t . Let S ( t ) denote the set of agents whose opinions are less than 1 at time t . From the hypothesis and preceding discussion, S ( t ) is nonempty for all time t . Let ¯ S ( t ) = [ n ] \ S ( t ) be the set of agents whose opinions equal 1 at time t . If ¯ S ( t ) is empty , i.e., x i (0) < 1 for all i ∈ [ n ] , then from Lemma 2, the system cannot reach a consensus at 1 . Suppose that ¯ S ( t ) is nonempty , i.e., there exists at least one agent whose initial opinion is 1 . Since the sequence of neighbor graphs is repeatedly jointly strongly connected, there must exist a finite time τ and an agent j ∈ ¯ S ( τ ) such that it has a neighbor k ∈ S ( τ ) , i.e., x j ( τ ) = 1 and x k ( τ ) < 1 with k ∈ N j ( τ ) . From (9), and with i replaced by j , it can be seen that x j ( τ + 1) < 1 . Using the same arguments, there exists a finite time ¯ τ such that x i ( ¯ τ ) < 1 for all i ∈ [ n ] , which contradicts the hypothesis that all x i ( t ) , i ∈ [ n ] , will reach a consensus at 1 . Therefore, the consensus at 1 will be reached if and only if x i (0) = 1 for all i ∈ [ n ] . Now suppose that x i (0) < 0 for all i ∈ [ n ] . There must exist a positiv e number α such that | x i (0) | ≥ α (i.e., x i (0) ≤ − α ) for all i ∈ [ n ] . It follows from Lemma 2 that | x i ( t ) | ≥ α (i.e., x i ( t ) ≤ − α ) for all i ∈ [ n ] and time t . From (11), we obtain the following two inequalities for s ij ( t ) , the entries of S ( x ( t ) , t ) . For each diagonal entry , s ii ( t ) = 1 − x i ( t ) 2 + x i ( t ) 2 w ii ( t ) ≥ x i ( t ) 2 w ii ( t ) ≥ α 2 β , where the last inequality makes use of Assumption 2. For each off-diagonal entry , s ij ( t ) = x i ( t ) 2 w ij ( t ) . Thus, s ij ( t ) is nonzero if and only if w ij ( t ) is nonzero, which implies that the graph of S ( x ( t ) , t ) is the same as the graph of W ( t ) , as well as neighbor graph N ( t ) . Moreov er, it can be seen that when s ij ( t ) > 0 , it must hold that s ij ( t ) ≥ α 2 β . From Proposition 1, all x i ( t ) , i ∈ [ n ] , will reach a consensus exponentially fast. Since x i ( t ) ≤ − α for all i ∈ [ n ] and time t , the consensus v alue must lie in [ − 1 , 0) . Next we show that all x i ( t ) , i ∈ [ n ] , in (9) will reach a consensus at v alue − 1 if and only if x i (0) = − 1 for all i ∈ [ n ] . Suppose that, to the contrary , there exists at least one i ∈ [ n ] such that − 1 < x i (0) < 0 . From (9), since x j ( t ) ≥ − 1 for all j ∈ N i ( t ) implies P j ∈N i ( t ) w ij ( t ) x j ( t ) ≥ − 1 , there holds x i ( t + 1) ≥ x i ( t ) − x i ( t ) 3 − x i ( t ) 2 . It can be verified that x i ( t ) − x i ( t ) 3 + x i ( t ) 2 increases as x i ( t ) increases when x i ( t ) ∈ ( − 1 , 1 3 ) . Suppose that − 1 < x i ( t ) < 0 . Then, it follo ws that x i ( t + 1) > − 1 , which implies that if x i (0) > − 1 , then x i ( t ) > − 1 for all t . Let S ( t ) denote the set of agents whose opinions are greater than − 1 at time t . From the hypothesis and preceding discussion, S ( t ) is nonempty for all time t . Let ¯ S ( t ) = [ n ] \ S ( t ) be the set of agents whose opinions equal − 1 at time t . If ¯ S ( t ) is empty , i.e., x i (0) > − 1 for all i ∈ [ n ] , then from Lemma 2, the system cannot reach a consensus at − 1 . Suppose that ¯ S ( t ) is nonempty , i.e., there exists at least one agent whose initial opinion is − 1 . Since the sequence of neighbor graphs is repeatedly jointly strongly connected, there must exist a finite time τ and an agent j ∈ ¯ S ( τ ) such that it has a neighbor k ∈ S ( τ ) , i.e., x j ( τ ) = − 1 and x k ( τ ) > − 1 with k ∈ N j ( τ ) . From (9), and with i replaced by j , it can be seen that x j ( τ + 1) > − 1 . Using the same arguments, there exists a finite time ¯ τ such that x i ( ¯ τ ) > − 1 for all i ∈ [ n ] , which contradicts the hypothesis that all x i ( t ) , i ∈ [ n ] , will reach a consensus at − 1 . Therefore, the consensus at − 1 will be reached if and only if x i (0) = − 1 for all i ∈ [ n ] . Remark 4: It should be noted that Theorem 2 does not consider the case where there exist i, j ∈ [ n ] such that x i (0) > 0 and x j (0) < 0 . It has been shown in [33] that for this case, the continuous-time model has lim t →∞ x ( t ) = 0 . Howe ver , this is not always the case for the discrete-time model with stubborn neutrals, as we will show shortly , since in discrete-time, the opinion of an agent i can jump from x i ( t ) > 0 to x i ( t + 1) < 0 , but this is not possible in the continuous-time case. Although we will only characterize partial limiting behavior of the discrete-time model for this case (see Theorem 3), we consider the general time- varying graph case whereas only the time-inv ariant graph case was studied in [33]. Moreover , we establish necessary and suf ficient conditions for the two e xtreme opinions, i.e., − 1 and 1 , which were not provided in [33]. The following example shows that the discrete-time model with stubborn neutrals (9) has different limiting behaviors from the continuous-time model considered in [33] (cf. Theorem 5 in [33]). Example 1: Suppose that there are 4 agents labeled 1 through 4. The neighbor graph is a complete graph and all the weights equal 1 4 . Suppose that the initial opinions are x 1 (0) = 1 and x i (0) = − 1 for i ∈ { 2 , 3 , 4 } . Thus, W = 1 4 1 4 1 4 1 4 1 4 1 4 1 4 1 4 1 4 1 4 1 4 1 4 1 4 1 4 1 4 1 4 , x (0) = 1 − 1 − 1 − 1 . From (9), x i (1) = − 1 2 for all i ∈ { 1 , 2 , 3 , 4 } , i.e., all the agents reach a consensus at − 1 2 . Similarly , if x 1 (0) = − 1 and x i (0) = 1 for i ∈ { 2 , 3 , 4 } , with the same weight matrix, all the agents will reach a consensus at 1 2 . Therefore, in the case when initial opinions contain both positiv e and negativ e values, the consensus value can be positiv e, negati ve, or zero (as shown in Theorem 3), depending on initial v alues, as well as the neighbor graph topology . Theor em 3: Suppose that Assumption 2 holds and that the sequence of neighbor graphs N (1) , N (2) , . . . is repeatedly jointly strongly connected. If x i (0) = 0 for at least one i ∈ [ n ] , then all x i ( t ) , i ∈ [ n ] , in (9) will reach a consensus at value 0 . Pr oof: From (9), if x i ( t ) = 0 , then x i ( t + 1) = 0 and thus x i ( τ ) = 0 for all τ ≥ t . If all the initial opinions equal 0 , the theorem is clearly true. Suppose therefore that there exists at least one agent whose initial opinion does not equal 0 . Consider the L yapunov function V ( x ( t )) = max i ∈ [ n ] | x i ( t ) | . From the preceding discussion, if x i (0) = 0 , then x i ( t ) = 0 for all time t . Thus, if x i ( t ) = 0 for all i ∈ [ n ] at some time t , then V ( x ( t )) = 0 and V ( x ( t + 1)) = 0 . Since there exists at least one agent whose opinion initially equals 0 and thus keeps at 0 , system (10) cannot reach any consensus state (i.e., a state at which all the agents ha ve the same opinion) except for 0 . From Lemma 2, V ( x ( t + 1)) ≤ V ( x ( t )) . Consider a specific time t . Let j be any agent such that | x j ( t ) | 6 = V ( x ( t )) , which implies that | x j ( t ) | < V ( x ( t )) ≤ 1 . From the second equality in (9), it can be verified that | x j ( t + 1) | < V ( x ( t )) . Let i be any agent such that | x i ( t ) | = V ( x ( t )) . First consider the case when x i ( t ) > 0 , which implies that x i ( t ) = max k ∈ [ n ] x k ( t ) . Let M ( τ ) be the set of agents whose opinions are the largest at time τ , i.e., x j ( τ ) = max k ∈ [ n ] x k ( τ ) for each j ∈ M ( τ ) . Since x i (0) = 0 for at least one i ∈ [ n ] , it follows that [ n ] \ M ( τ ) is nonempty unless all the agents reach a consensus at 0 at time τ . Since the sequence of neighbor graphs is repeatedly jointly strongly connected, there must exist a finite time τ ≥ t and an agent j ∈ M ( τ ) such that it has a neighbor k / ∈ M ( τ ) , i.e., x k ( τ ) < x j ( τ ) with k ∈ N j ( τ ) . From the second equality in (9), with i replaced by j , it can be seen that x j ( τ + 1) < x j ( τ ) , which implies that V ( x ( τ )) < V ( x ( t )) . Similarly , the case when x i ( t ) < 0 , there must exist a finite time ¯ τ > t such that V ( x ( ¯ τ )) < V ( x ( t )) . Therefore, x i ( t ) will con ver ge to 0 for all i ∈ [ n ] . I V . S I M U L A T I O N S W e now provide a simple simulation example to highlight the effects of the susceptibility function f i ( x i ( t )) when com- pared to the original DeGroot model. W e generate a social network with n = 30 individuals, whose graph is strongly connected, and with randomly selected influence weights w ij which we hav e assumed are time-inv ariant for simplicity . W e omit showing the W matrix due to spatial limitations. The initial conditions are sampled from a uniform distribution in the interval (0 , 1) . For the same graph and initial conditions , we simulated 1) the opinion dynamics as modeled by the original DeGroot process, i.e. f i ( x i ( t )) = 1 , ∀ i ∈ [ n ] , and 2) the opinion dynamics where each individual is a stubborn positive, i.e. f i ( x i ( t )) = 1 2 (1 − x i ( t )) , ∀ i ∈ [ n ] . Due to space limitations, we will not include simulations for stubborn neutral individuals. The original DeGroot dynamics and stubborn positi ve dynamics are sho wn in Fig. 1 and Fig. 2 respectively . W e clearly see that the final consensus value is dif ferent, ev en though the initial conditions and graph topology are the same. Specifically , the stubborn positive individuals with x i (0) close to one have low susceptibility , and are reluctant to change their opinions. On the other hand, individuals with x i (0) close to minus one are significantly more open to influence by others. As a result, the final consensus value is much close in value to one. In other words, while both the DeGroot model and model with stubborn positiv es reaches a consensus of opinions, the polarity of the stubborn positi ve individuals results in a more polarized final opinion, closer to one end of the opinion spectrum. Moreover , the low susceptibility of the indi viduals with x i ( t ) near one signif- icantly reduces the con vergence rate. An interesting future work is to determine quantitatively the effects of dif ferent susceptibility functions in shifting the final consensus value, and in altering the con ver gence rate, when compared to the 0 5 0 1 00 1 50 2 00 -1 -0.5 0 0 . 5 1 T ime ste p (t) Opinio n va lue X : 1 9 8 Y : 0 .0 6 4 3 9 Fig. 1. Evolution of opinions for indi viduals fully susceptible (original DeGroot model). 0 5 0 1 00 1 50 2 00 -1 -0.5 0 0 . 5 1 X : 2 0 0 Y : 0 .4 4 6 7 T ime ste p (t) Opinio n va lue Fig. 2. Evolution of opinions for stubborn positive individuals ( f i ( x i ( t )) = 1 2 (1 − x i ( t )) ). DeGroot model; the qualitativ ely ef fects are obvious from studying the susceptibility functions themselves. V . C O N C L U S I O N S In this paper, a discrete-time polar opinion dynamics model with susceptibility has been studied. W e first proposed a general model and sho wed it unifies the DeGroot model and the Friedkin-Johnsen model by considering state-dependent susceptibility . W e then considered specific susceptibility functions moti vated by social examples. Conditions on the time-varying graph topology , and the initial opinion values, are giv en for the social network to reach a consensus. Necessary and suf ficient conditions are giv en on the initial opinion values for the social network to reach a consensus on an extreme opinion at either end of the opinion interval. For future work, we seek study the case of stubborn extremists, f i ( t ) = 1 − x i ( t ) 2 , and better understand the behavior of stubborn neutrals when there are initial opinions on either side of x i = 0 . In addition, we will aim to generalize stubborn positiv e, neutral, and extremist functions to so that their v alues at the ke y points x i = − 1 , 0 , 1 are fixed b ut may v ary smoothly between these points, and consider mix ed individuals in the same network. R E F E R E N C E S [1] M. H. DeGroot, “Reaching a consensus, ” Journal of the American Statistical Association , vol. 69, no. 345, pp. 118–121, 1974. [2] J. N. Tsitsiklis, “Problems in decentralized decision making and computation, ” Ph.D. dissertation, Department of Electrical Engineering and Computer Science, MIT , 1984. [3] A. Jadbabaie, J. Lin, and A. S. Morse, “Coordination of groups of mobile autonomous agents using nearest neighbor rules, ” IEEE T rans. Autom. Contr ol , vol. 48, no. 6, pp. 988–1001, 2003. [4] R. Olfati-Saber and R. M. Murray , “Consensus seeking in networks of agents with switching topology and time-delays, ” IEEE Tr ans. Autom. Contr ol , vol. 49, no. 9, pp. 1520–1533, 2004. [5] W . Ren and R. W . Beard, “Consensus seeking in multiagent systems under dynamically changing interaction topologies, ” IEEE Tr ans. Autom. Contr ol , vol. 50, no. 5, pp. 655–661, 2005. [6] L. Moreau, “Stability of multi-agent systems with time-dependent communication links, ” IEEE T rans. Autom. Contr ol , vol. 50, no. 2, pp. 169–182, 2005. [7] V . D. Blondel, J. M. Hendrickx, A. Olshevsky , and J. N. Tsitsiklis, “Con ver gence in multiagent coordination, consensus, and flocking, ” in Pr oc. 44th IEEE Conf. Decision and Control , 2005, pp. 2996–3000. [8] R. Olfati-Saber , J. A. Fax, and R. M. Murray , “Consensus and cooperation in networked multi-agent systems, ” Proceedings of the IEEE , vol. 95, no. 1, pp. 215–233, 2007. [9] B. T ouri and A. Nedi ´ c, “Product of random stochastic matrices, ” IEEE T rans. Autom. Contr ol , vol. 59, no. 2, pp. 437–448, 2014. [10] J. Liu, A. S. Morse, A. Nedi ´ c, and T . Bas ¸ar, “Internal stability of linear consensus processes, ” in Proc. 53rd IEEE Conf. Decision and Contr ol , 2014, pp. 922–927. [11] A. Nedi ´ c and J. Liu, “On conver gence rate of weighted-averaging dynamics for consensus problems, ” IEEE T rans. Autom. Control , vol. 62, no. 6, pp. 766–781, 2017. [12] C. E. Osgood and P . H. T annenbaum, “The principle of congruity in the prediction of attitude change, ” Psychological Review , vol. 62, no. 1, pp. 42–55, 1955. [13] A. G. Miller , J. W . McHoskey , C. M. Bane, and T . G. Dowd, “The attitude polarization phenomenon: role of response measure, attitude extremity , and behavioral consequences of reported attitude change, ” Journal of P ersonality and Social Psychology , vol. 64, no. 4, p. 561, 1993. [14] E. M. Pomerantz, S. Chaiken, and R. S. T ordesillas, “ Attitude strength and resistance processes, ” Journal of P ersonality and Social Psychol- ogy , vol. 69, no. 3, pp. 408–419, 1995. [15] J. N. Bassili, “Meta-judgmental versus operativ e indexes of psycho- logical attributes: the case of measures of attitude strength, ” Journal of P ersonality and Social Psychology , vol. 71, no. 4, p. 637, 1996. [16] M. M ¨ as, A. Flache, and J. A. Kitts, “Cultural Integration and Dif- ferentiation in Groups and Organizations, ” in P erspectives on Cultur e and Agent-based Simulations . Springer, 2014, pp. 71–90. [17] P . Duggins, “A Psychologically-Motiv ated Model of Opinion Change with Applications to American Politics, ” Journal of Artificial Societies and Social Simulation , vol. 20, no. 1, pp. 1–13, 2017. [Online]. A vailable: http://jasss.soc.surrey .ac.uk/20/1/13.html [18] W . Xia, M. Cao, and K. H. Johansson, “Structural balance and opinion separation in trust-mistrust social networks, ” IEEE T ransactions on Contr ol of Network Systems , vol. 3, no. 1, pp. 46–56, 2016. [19] Z. Meng, G. Shi, K. H. Johansson, M. Cao, and Y . Hong, “Behaviors of networks with antagonistic interactions and switching topologies, ” 2016, arXiv:1402.2766 [math.OC]. [20] J. M. Hendrickx, “ A lifting approach to models of opinion dynamics with antagonisms, ” in Proc. 53rd IEEE Conf. Decision and Control , 2014, pp. 2118–2123. [21] J. Liu, X. Chen, T . Bas ¸ar , and M.-A. Belabbas, “Stability of discrete- time Altafini’ s model: a graphical approach, ” in Pr oc. 54th IEEE Conf. Decision and Control , 2015, pp. 2835–2840. [22] C. Altafini, “Consensus problems on networks with antagonistic in- teractions, ” IEEE T rans. Autom. Control , vol. 58, no. 4, pp. 935–946, 2013. [23] J. Hu and W . X. Zheng, “Bipartite consensus for multi-agent systems on directed signed networks, ” in Proc. 52nd IEEE Conf. Decision and Contr ol , 2013, pp. 3451–3456. [24] A. V . Proskurnikov , A. Matveev , and M. Cao, “Opinion dynamics in social networks with hostile camps: consensus vs. polarization, ” IEEE T ransactions on Automatic Control , vol. 61, no. 6, pp. 1524–1536, 2016. [25] J. Liu, X. Chen, and T . Bas ¸ar, “Stability of the continuous-time altani model, ” in Pr oceedings of the 2016 American Contr ol Confer ence , 2016, pp. 1930–1935. [26] R. Hegselmann and U. Krause, “Opinion dynamics and bounded confidence models, analysis, and simulation, ” Journal of Artifical Societies and Social Simulation , vol. 5, no. 3, pp. 1–33, 2002. [27] V . D. Blondel, J. M. Hendrickx, and J. N. Tsitsiklis, “On Krause’s multi-agent consensus model with state-dependent connectivity , ” IEEE T rans. Autom. Contr ol , vol. 54, no. 11, pp. 2586–2597, 2009. [28] S. R. Etesami and T . Bas ¸ar, “Game-theoretic analysis of the Hegselmann-Krause model for opinion dynamics in finite dimensions, ” IEEE Tr ans. Autom. Control , vol. 60, no. 7, pp. 1886–1897, 2015. [29] N. E. Friedkin, “The problem of social control and coordination of complex systems in sociology: a look at the community cleav age problem, ” IEEE Control Systems Magazine , vol. 35, no. 3, pp. 40– 51, 2015. [30] N. E. Friedkin and E. C. Johnsen, Social Influence Network Theory: A Sociological Examination of Small Group Dynamics . Cambridge Univ ersity Press, 2011, vol. 33. [31] P . Jia, A. Mirtabatabaei, N. E. Friedkin, and F . Bullo, “Opinion dynamics and the ev olution of social power in influence networks, ” SIAM Review , vol. 57, no. 3, pp. 367–397, 2015. [32] P . Dandekar, A. Goel, and D. T . Lee, “Biased assimilation, homophily , and the dynamics of polarization, ” Pr oceedings of the National Academy of Sciences , vol. 110, no. 15, pp. 5791–5796, 2013. [33] V . Amelkin, F . Bullo, and A. K. Singh, “Polar opinion dynamics in social networks, ” IEEE T rans. Autom. Contr ol , to appear . [34] J. Ghaderi and R. Srikant, “Opinion dynamics in social networks with stubborn agents: equilibrium and conv ergence rate, ” IEEE Tr ans. Autom. Contr ol , vol. 50, no. 12, pp. 3209–3215, 2014. [35] N. E. Friedkin and E. C. Johnsen, “Social influence networks and opinion change, ” Advances in Gr oup Pr ocesses , vol. 16, no. 1, pp. 1–29, 1999. [36] A. Nedi ´ c, A. Olshevsk y , A. Ozdaglar, and J. N. Tsitsiklis, “On distributed averaging algorithms and quantization ef fects, ” IEEE T rans. Autom. Contr ol , vol. 54, no. 11, pp. 2506–2517, 2009. [37] N. L. W aters and V . P . Hans, “A Jury of One: Opinion F ormation, Conformity , and Dissent on Juries, ” Journal of Empirical Legal Studies , vol. 6, no. 3, pp. 513–540, 2009. [38] S. E. Asch, Gr oups, Leadership, and Men . Carnegie Press: Pittsbur gh, 1951, ch. Effects of Group Pressure Upon the Modification and Distortion of Judgments, pp. 222–236. [39] R. L. Gorden, “Interaction Between Attitude and the Definition of the Situation in the Expression of Opinion, ” American Sociological Review , vol. 17, no. 1, pp. 50–58, 1952. [40] F . M. Thrasher, The Gang: A Study of 1,313 Gangs in Chicago . Univ ersity of Chicago Press, 1963. [41] S. Schachter , “Deviation, Rejection, and Communication, ” The Journal of Abnormal and Social Psychology , vol. 46, no. 2, pp. 190–207, 1951. [42] F . Merei, “Group Leadership and Institutionalization, ” Human Rela- tions , vol. 2, no. 1, pp. 23–39, 1949. [43] L. G. Zuck er , “The Role of Institutionalization in Cultural Persistence, ” American Sociological Review , pp. 726–743, 1977.
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment