Skewness and kurtosis unbiased by Gaussian uncertainties
Noise is an unavoidable part of most measurements which can hinder a correct interpretation of the data. Uncertainties propagate in the data analysis and can lead to biased results even in basic descriptive statistics such as the central moments and …
Authors: Lorenzo Rimoldini
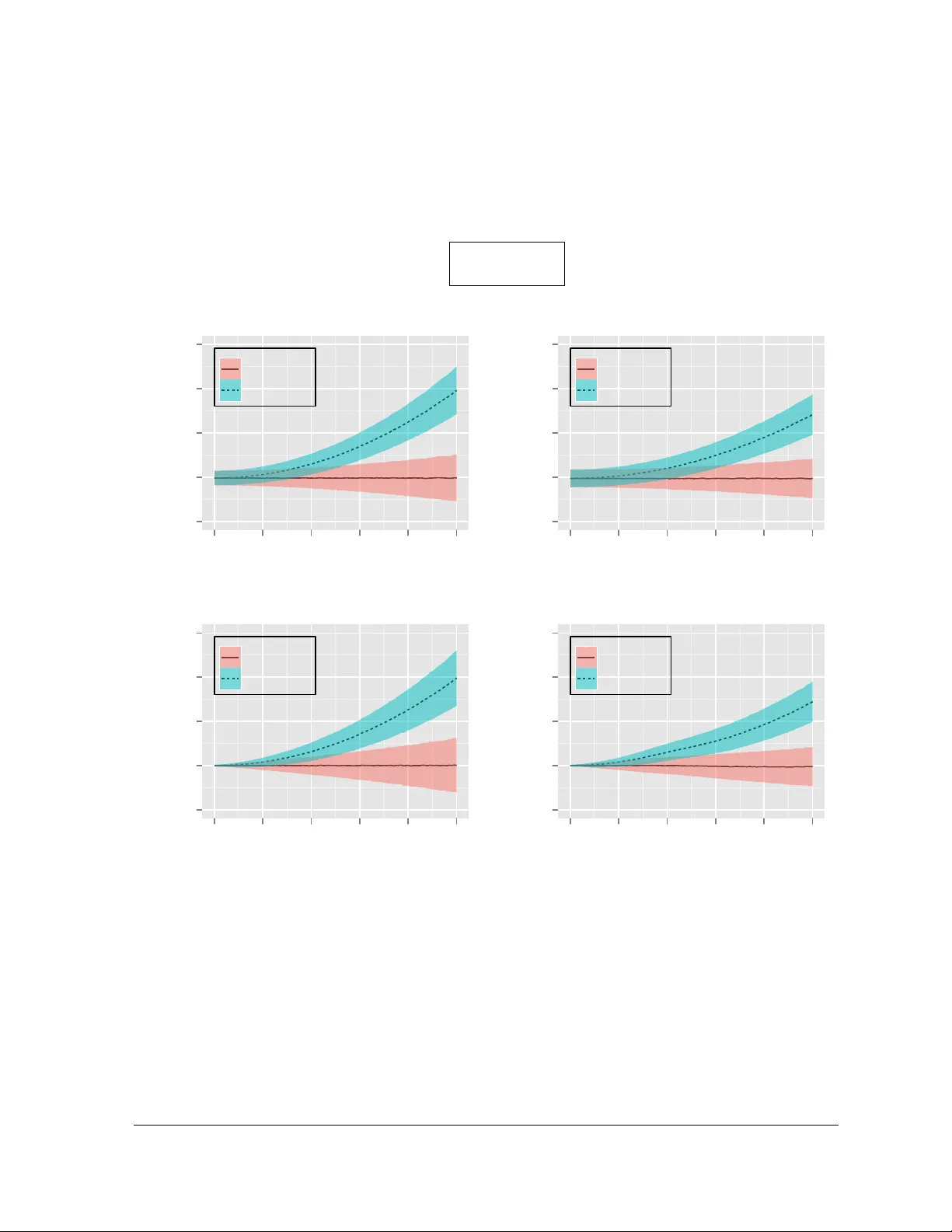
Sk ewness and kurtosis un biased b y Gaussian uncertain ties Lorenzo Rimoldini Observ atoire astronomique de l’Univ ersit´ e de Gen ` ev e, c hemin des Maillettes 51, CH-1290 V ersoix, Switzerland ISDC Data Centre for Astroph ysics, Universit ´ e de Gen` eve, chemin d’Ecogia 16, CH-1290 V ersoix, Switzerland lorenzo@rimoldini.info Draft version: April 29, 2013 Abstract Noise is an una v oidable part of most measuremen ts whic h can hinder a correct in- terpretation of the data. Uncertain ties propagate in the data analysis and can lead to biased results ev en in basic descriptive statistics suc h as the cen tral moments and cum u- lan ts. Expressions of noise-un biased estimates of central moments and cumulan ts up to the fourth order are presented under the assumption of indep enden t Gaussian unce rtain- ties, for weigh ted and un w eigh ted statistics. These results are expected to b e relev ant for applications of the sk ewness and kurtosis estimators suc h as outlier detections, nor- malit y tests and in automated classification procedures. The comparison of estimators corrected and not corrected for noise biases is illustrated with sim ulations as a function of signal-to-noise ratio, employing different sample sizes and weigh ting sc hemes. 1 In tro duction Measuremen ts generally provide an approximate description of real phenomena, b ecause data acquisition comp ounds many processes whic h contribute, to a different degree, to instrumental errors (e.g., related to sensitivit y or systematic biases) and uncertain ties of statistical nature. While instrumen tal effects are addressed b efore data analysis, statistical uncertain ties propagate in subsequen t pro cessing and can affect b oth precision and accuracy of results, esp ecially at low signal-to-noise ( S / N ) ratios. Correcting for biases generated b y noise can help the c haracterization and interpretation of w eak signals, and in some cases improv e a significan t fraction of all data (e.g., the n um b er of astronomical sources increases dramatically near the fain t detection threshold, since there are man y more sources far a w a y than nearb y). In this pap er, noise-unbiased estimates of cen tral momen ts and cumulan ts up to the fourth order, whic h are often emplo y ed to c haracterize the shape of the distribution of data, are derived analytically . Some of the adv antages of these estimators include the ease of computation and the abilit y to encapsulate imp ortan t features in a few num bers. Sk ewness and kurtosis measure the degree of asymmetry and p eak edness or weigh t of the tails of the distribution, resp ectively , and they are useful for the detection of outliers, the assessment of departures from normality of the data (D’Agostino, 1986), the classification of ligh t v ariations of astronomical sources (Rimoldini, 2013a) and many other applications. V arious estimators of skewness and kurtosis are a v ailable in the literature (e.g., Mo ors et al., 1996; Hosking, 1990; Gro enev eld & Meeden, 1984; Bowley, 1920), some of whic h aim at mitigating the sensitivit y to outliers of the conv entional formulations. On the other hand, robust measures migh t miss imp ortant features of signals, esp ecially when these are characterized b y outliers (as in astronomical time series where stellar bursts or eclipses from binary systems represen t rare even ts in the light curve) and weigh ting might help distinguish true outliers from spurious data (employing additional information such as the accuracy of eac h measurement), so the traditional forms of weigh ted central momen ts and cum ulan ts are emplo y ed in this w ork. Skewness and kurtosis unbiased by Gaussian uncertainties page 1 of 36 Momen ts are usually computed on random v ariables. Herein, their application is extended to data generated from deterministic functions and randomized b y the unev en sampling of a finite num ber of measuremen ts and by their uncertainties, whereas the corresp onding ‘population’ statistics are defined in the limit of an infinite regular sampling with no random or systematic errors. This scenario is common in astronomical time series, where measurements are t ypically non-regular due to observ ational constrain ts, they are unav oidably affected by noise, and sometimes also not very numerous: all of these aspects in tro duce some lev el of randomness in the characterization of the underlying signal of a star. While the effects of sampling and sample size on time series are studied in Rimoldini (2013a,b), this w ork addresses the bias, precision and accuracy of estimators when measuremen ts are affected (mostly) b y Gaussian uncertain ties. Bias is defined as the difference b et w een exp ectation and p opulation v alues and thus expresses a systematic deviation from the true v alue. Precision is describ ed by the disp ersion of measurements, while accuracy is related to the distance of an estimator from the true v alue and th us com bines the bias and precision concepts (e.g., accuracy can b e measured by the mean square error, defined by the sum of bias and uncertaint y in quadrature). Noise-un biased expressions are pro vided for the v ariance, skewness and kurtosis (cen tral momen ts and cum ulan ts), w eigh ted and unw eighted, assuming Gaussian uncertainties and indep endent measurements. The dependence of noise-unbiased estimators on S/N is illustrated with sim ulations emplo ying different sample sizes and t wo w eigh ting sc hemes: the common in v erse-squared uncertain ties and interpolation- based w eigh ts as describ ed in Rimoldini (2013a). The latter demonstrated a significant improv emen t in the precision of weigh ted estimators at the high S/ N end. This pap er is organized as follows. The notation employ ed throughout is defined in Sec. 2, follow ed b y the description of the metho d to estimate Gaussian-noise un biased moments in Sec. 3. Noise-unbiased estimates of momen ts and cumulan ts (biased and unbiased by sample-size) are presented in Sections 4 and 5, in b oth weigh ted and un w eigh ted formulations, and the sp ecial case of error-weigh ted estimators is presen ted in Sec. 6. The noise-un biased estimators are compared with the uncorrected (noise-biased) coun terparts with sim ulated signals as a function of S/ N ratio in Sec. 7, including w eigh ted and un- w eigh ted schemes and t w o differen t sample sizes. Conclusions are dra wn in Sec. 8, follo w ed b y detailed deriv ations of the noise-unbiased estimators in App. A. 2 Notation F or a set of n measuremen ts x = ( x 1 , x 2 , ..., x n ), the follo wing quan tities are defined. (i) Population central momen ts µ r = h ( x − µ ) r i with mean µ = h x i , where h . i denotes exp ectation, and cumulan ts κ 2 = µ 2 , κ 3 = µ 3 , κ 4 = µ 4 − 3 µ 2 2 (e.g., Stuart & Ord, 1969). (ii) The sum of the p -th p ow er of weigh ts is defined as V p = P n i =1 w p i . (iii) The mean ¯ θ of a generic set of n elements θ i asso ciated with w eigh ts w i is ¯ θ = P n i =1 w i θ i /V 1 . (iv) Sample central moments m r = P n i =1 w i ( x i − ¯ x ) r /V 1 and corresp onding cum ulan ts k r . (v) Sample-size un biased estimates of cen tral moments M i and cumulan ts K i , i.e., h M i i = µ i and h K i i = κ i . (vi) The standardized skewness and kurtosis are defined as g 1 = k 3 /k 3 / 2 2 , g 2 = k 4 /k 2 2 , G 1 = K 3 /K 3 / 2 2 , and G 2 = K 4 /K 2 2 , with population v alues γ 1 = κ 3 /κ 3 / 2 2 and γ 2 = κ 4 /κ 2 2 . G 1 and G 2 satisfy consistency (for n → ∞ ) but are not unbiased in general (e.g., see Heijmans, 1999, for exceptions). (vii) Noise-unbiased estimates of cen tral momen ts and cum ulan ts are denoted by an asterisk superscript. (viii) No systematic errors are considered herein and random errors are simply referred to as errors or uncertain ties. (ix) Statistics weigh ted by the inv erse-squared uncertainties are called ‘error-weigh ted’ for brevit y and in terp olation-based weigh ts computed in phase (Rimoldini, 2013a) are named ‘phase w eigh ts’. Skewness and kurtosis unbiased by Gaussian uncertainties page 2 of 36 3 Metho d The goal is to deriv e an estimator T ∗ ( x , ) as a function of observ ables (measurements x with corresp ond- ing uncertainties ) whic h is un biased by the noise in the data, i.e., suc h that the exp ectation h T ∗ ( x , ) i equals the estimator T ( ξ ) in terms of the true (unknown) v alues ξ aimed at by the measurements. The noise-unbiased estimator T ∗ ( x , ) is obtained with the following pro cedure and assumptions. If n indep enden t measuremen ts x are associated with indep endent Gaussian uncertainties , the expected v alue h T ( x ) i of the estimator T ( x ) is ev aluated from measurements x and the join t probabilit y density p ( x | ξ , ), for giv en true v alues ξ and measurement uncertainties : h T ( x ) i = Z R n T ( x 0 ) p ( x 0 | ξ , ) d n x 0 , (1) where p ( x 0 | ξ , ) = n Y i =1 1 √ 2 π i exp − ( x 0 i − ξ i ) 2 2 2 i . (2) As shown in App. A, the exp ectation h T ( x ) i of the estimators considered herein can b e decomp osed as h T ( x ) i = T ( ξ ) + f ( ξ , ) . (3) Th us, the noise-free estimator T ( ξ ) = h T ( x ) i − f ( ξ , ) can be estimated in terms of measuremen ts x and uncertain ties by the noise-unbiased estimator T ∗ ( x , ) = T ( x ) − f ∗ ( x , ), where h f ∗ ( x , ) i = f ( ξ , ) and, b y definition, h T ∗ ( x , ) i = T ( ξ ). The f ∗ ( x , ) term is deriv ed first b y computing f ( ξ , ) = h T ( x ) i − T ( ξ ) and then by replacing terms dep ending on ξ in f ( ξ , ) with terms as a function of x whic h satisfy the requiremen t h f ∗ ( x , ) i = f ( ξ , ) (see App. A). A prop erty often used in the following sections is that a noise-un biased linear com bination of N estimators is equiv alen t to the linear com bination of noise- un biased estimators: " N X i =1 c i T i ( x ) # ∗ = N X i =1 c i T ∗ i ( x ) , (4) where the coefficients c i are indep endent of the measurements x . 4 Gaussian-noise un biased sample momen ts and cum ulan ts W eighted sample cen tral momen ts un biased by Gaussian uncertain ties, such as the v ariance m ∗ 2 , skewness m ∗ 3 , kurtosis m ∗ 4 and the resp ective cum ulan ts ab out the w eighted mean ¯ x ∗ = ¯ x are deriv ed assuming indep enden t measuremen ts x i , uncertainties i and w eigh ts w i , as describ ed in full detail in App. A. They are defined as follows: m ∗ 2 = m 2 − 1 V 1 n X i =1 w i 2 i 1 − w i V 1 = k ∗ 2 (5) m ∗ 3 = m 3 − 3 V 1 n X i =1 w i 2 i ( x i − ¯ x ) 1 − 2 w i V 1 = k ∗ 3 (6) m ∗ 4 = m 4 − 6 V 1 n X i =1 w i 2 i " ( x i − ¯ x ) 2 1 − 2 w i V 1 − 2 i 2 1 − 2 w i V 1 2 + m ∗ 2 w i V 1 # − 3 V 4 1 n X i =1 w 2 i 2 i ! 2 (7) ( m 2 2 ) ∗ = ( m ∗ 2 ) 2 − 4 V 2 1 n X i =1 w 2 i 2 i ( x i − ¯ x ) 2 − 2 i 2 1 − 2 w i V 1 + 2 V 4 1 n X i =1 w 2 i 2 i ! 2 (8) k ∗ 4 = m ∗ 4 − 3 ( m 2 2 ) ∗ . (9) By definition, the ab ov e expressions satisfy h m ∗ r i = 1 V 1 n X i =1 w i ξ i − ¯ ξ r . (10) Skewness and kurtosis unbiased by Gaussian uncertainties page 3 of 36 The unw eigh ted forms can b e obtained by substituting w i = 1 (for all i ) and V p = n (for all p ) in all terms, leading to: m ∗ 2 = m 2 − n − 1 n 2 n X i =1 2 i = k ∗ 2 (11) m ∗ 3 = m 3 − 3( n − 2) n 2 n X i =1 2 i ( x i − ¯ x ) = k ∗ 3 (12) m ∗ 4 = m 4 − 6( n − 2) n 2 n X i =1 2 i ( x i − ¯ x ) 2 − 6 m ∗ 2 n 2 n X i =1 2 i + 3( n − 2) 2 n 3 n X i =1 4 i − 3 n 4 n X i =1 2 i ! 2 (13) ( m 2 2 ) ∗ = ( m ∗ 2 ) 2 − 4 n 2 n X i =1 2 i ( x i − ¯ x ) 2 + 2( n − 2) n 3 n X i =1 4 i + 2 n 4 n X i =1 2 i ! 2 (14) k ∗ 4 = m ∗ 4 − 3 ( m 2 2 ) ∗ . (15) 5 Gaussian-noise and sample-size un biased momen ts and cum u- lan ts The estimates of weigh ted central moments which are un biased by b oth sample-size and Gaussian uncer- tain ties, suc h as the v ariance M ∗ 2 , sk ewness M ∗ 3 , kurtosis M ∗ 4 and the respective cum ulan ts, are defined in terms of the noise-unbiased sample estimators as follows: M ∗ 2 = V 2 1 V 2 1 − V 2 m ∗ 2 = K ∗ 2 (16) M ∗ 3 = V 3 1 V 3 1 − 3 V 1 V 2 + 2 V 3 m ∗ 3 = K ∗ 3 (17) M ∗ 4 = V 2 1 ( V 4 1 − 3 V 2 1 V 2 + 2 V 1 V 3 + 3 V 2 2 − 3 V 4 ) ( V 2 1 − V 2 )( V 4 1 − 6 V 2 1 V 2 + 8 V 1 V 3 + 3 V 2 2 − 6 V 4 ) m ∗ 4 + − 3 V 2 1 (2 V 2 1 V 2 − 2 V 1 V 3 − 3 V 2 2 + 3 V 4 ) ( V 2 1 − V 2 )( V 4 1 − 6 V 2 1 V 2 + 8 V 1 V 3 + 3 V 2 2 − 6 V 4 ) ( m 2 2 ) ∗ (18) K ∗ 4 = V 2 1 ( V 4 1 − 4 V 1 V 3 + 3 V 2 2 ) ( V 2 1 − V 2 )( V 4 1 − 6 V 2 1 V 2 + 8 V 1 V 3 + 3 V 2 2 − 6 V 4 ) m ∗ 4 + − 3 V 2 1 ( V 4 1 − 2 V 2 1 V 2 + 4 V 1 V 3 − 3 V 2 2 ) ( V 2 1 − V 2 )( V 4 1 − 6 V 2 1 V 2 + 8 V 1 V 3 + 3 V 2 2 − 6 V 4 ) ( m 2 2 ) ∗ . (19) The deriv ation of the sample-size un biased weigh ted estimators is describ ed in Rimoldini (2013b). The corresp onding unw eighted forms can b e achiev ed b y direct substitution V p = n for all p , leading to: M ∗ 2 = n n − 1 m ∗ 2 = M 2 − 1 n n X i =1 2 i = K ∗ 2 (20) M ∗ 3 = n 2 ( n − 1)( n − 2) m ∗ 3 = M 3 − 3 n − 1 n X i =1 2 i ( x i − ¯ x ) = K ∗ 3 (21) M ∗ 4 = n ( n 2 − 2 n + 3) ( n − 1)( n − 2)( n − 3) m ∗ 4 − 3 n (2 n − 3) ( n − 1)( n − 2)( n − 3) ( m 2 2 ) ∗ (22) K ∗ 4 = n 2 ( n + 1) ( n − 1)( n − 2)( n − 3) m ∗ 4 − 3 n 2 ( n − 2)( n − 3) ( m 2 2 ) ∗ . (23) Skewness and kurtosis unbiased by Gaussian uncertainties page 4 of 36 6 Sp ecial cases If weigh ts are related to measurement errors as w i = 1 / 2 i , the noise-unbiased w eigh ted sample momen ts and cumulan ts reduce to the follo wing expressions: m ∗ 2 = m 2 − n − 1 V 1 = k ∗ 2 (24) m ∗ 3 = m 3 − 3 V 1 n X i =1 ( x i − ¯ x ) = k ∗ 3 (25) m ∗ 4 = m 4 − 6 V 1 n X i =1 ( x i − ¯ x ) 2 − 2 i 2 + 6 m ∗ 2 V 1 − 3 V 2 1 (26) ( m 2 2 ) ∗ = ( m ∗ 2 ) 2 − 2( m ∗ 2 + m 2 ) V 1 (27) k ∗ 4 = m ∗ 4 − 3 ( m 2 2 ) ∗ . (28) In the case of constan t errors, i.e., i = 0 for all i , some of the unw eigh ted estimators are equiv alent or similar to their noise-unbiased coun terparts: Sk ewness: k ∗ 3 = k 3 and K ∗ 3 = K 3 (also m ∗ 3 = m 3 and M ∗ 3 = M 3 ) , (29) Kurtosis: k ∗ 4 ≈ k 4 and K ∗ 4 = K 4 , (30) where the appro ximation k ∗ 4 ≈ k 4 holds for large v alues of n or S/ N ratios since k ∗ 4 − k 4 k 2 2 = 6 2 0 ( k ∗ 2 + k 2 ) n k 2 2 ≈ 6 1 + 2 ( S/ N ) 2 n [1 + ( S/ N ) 2 ] 2 , (31) considering that, for constant errors, P i 2 i /n = 2 0 and ( S/ N ) 2 ≈ k ∗ 2 / 2 0 ≈ k 2 / 2 0 − 1. F or sample cum ulan ts up to the fourth order, only the v ariance dep ends strongly on noise. Ho wev er, this is an imp ortan t estimator b ecause it is often in v olv ed in definitions of standardized sk ewness ( g 1 and G 1 ) and kurtosis ( g 2 and G 2 ) as follo ws: g 1 = k 3 /k 3 / 2 2 , G 1 = K 3 /K 3 / 2 2 , (32) g 2 = k 4 /k 2 2 , G 2 = K 4 /K 2 2 . (33) F or consistency with the ab ov e definitions, the noise-un biased equiv alents are defined as g ∗ 1 = k ∗ 3 / ( k ∗ 2 ) 3 / 2 , G ∗ 1 = K ∗ 3 / ( K ∗ 2 ) 3 / 2 , (34) g ∗ 2 = k ∗ 4 / ( k ∗ 2 ) 2 , G ∗ 2 = K ∗ 4 / ( K ∗ 2 ) 2 , (35) although the truly noise-unbiased expressions should hav e been computed on the ratios in Eqs (32)–(33). The application of Eqs (34)–(35) should generally b e restricted to larger samples (e.g., n > 50) with S/ N ratios greater than a few, in order to a v oid non-p ositive v alues of k ∗ 2 or K ∗ 2 . 7 Estimators as a function of signal-to-noise ratio Noise-biased and unbiased estimators are compared as a function of signal-to-noise ratio S/ N with sim- ulated data and different weigh ting schemes for sp ecific signals, sampling and error laws. The v alues of the population moments of the contin uous simulated p erio dic ‘true’ signal ξ ( φ ) are computed av eraging in phase φ as follows: µ r = 1 2 π Z 2 π 0 [ ξ ( φ ) − µ ] r d φ, where µ = 1 2 π Z 2 π 0 ξ ( φ ) d φ. (36) Skewness and kurtosis unbiased by Gaussian uncertainties page 5 of 36 7.1 Sim ulation Sim ulated signals are describ ed by a sin usoidal function to the fourth p o w er, which has a non-zero sk ewness and thus makes it p ossible to ev aluate the precision and accuracy of the sk ewness standardized b y the estimated v ariance without simply reflecting the accuracy of the v ariance. The S/ N lev el is ev aluated by the ratio of the standard deviation √ µ 2 of the true signal ξ ( φ ) and the ro ot of the mean of squared measurement uncertain ties i (assumed indep endent of the signal). The signal ξ ( φ ) is sampled n = 100 and 1000 times at phases φ i randomly dra wn from a uniform distribution, while the S/ N ratio v aries from 1 to 1000 and determines the uncertainties i of measurements x i as follows: ξ ( φ ) = A sin 4 φ x i ∼ N ( ξ i , 2 i ) for ξ i = ξ ( φ i ) and φ i ∼ U (0 , 2 π ) 2 i = (1 + ρ i ) µ 2 / ( S/ N ) 2 for ρ i ∼ U ( − 0 . 8 , 0 . 8) , (37) (38) (39) where the i -th measurement x i is drawn from a normal distribution N ( ξ i , 2 i ) of mean ξ i and v ariance 2 i . The latter is defined in terms of a v ariable ρ i randomly dra wn from a uniform distribution U ( − 0 . 8 , 0 . 8) so that measuremen t uncertainties v ary b y up to a factor of 3 for a given µ 2 and S/ N ratio. Simulations w ere rep eated 10 4 times for eac h S/ N ratio (for n = 100 and 1000). The dep endence of weigh ted estimators on sample size and the corresp onding unbiased expressions w ere presented in Rimoldini (2013b). Herein, only large sample sizes are employ ed so that sample-size biases are negligible with resp ect to the ones resulting from small S/ N ratios. A sample signal and sim ulated data are illustrated in Fig. 1 for n = 100 and S/ N = 2. The reference p opulation v alues of the mean, v ariance, sk ewness and kurtosis of the sim ulated signal are listed in table 1 of Rimoldini (2013b). Error weigh ts are defined b y w i = 1 / 2 i , while mixed error-phase weigh ts follow Rimoldini (2013a), assuming phase-sorted data: w i = h ( S/ N | a, b ) w 0 i P n j =1 w 0 j + [1 − h ( S/ N | a, b )] − 2 i P n j =1 − 2 j ∀ i ∈ (1 , n ) w 0 i = φ i +1 − φ i − 1 ∀ i ∈ (2 , n − 1) w 0 1 = φ 2 − φ n + 2 π w 0 n = φ 1 − φ n − 1 + 2 π h ( S/ N | a, b ) = 1 1 + e − ( S/ N − a ) /b for a, b > 0 . (40) (41) (42) (43) (44) W eighting effectively decreases the sample size, since more imp ortance is given to some data at the exp ense of other ones and results dep end mostly on fewer ‘relev ant’ measuremen ts (e.g., weigh ting b y the in v erse-squared uncertain ties can w orsen precision at high S/ N lev els). W eighted pro cedures are desirable when the disp ersion and bias of estimators from an effectiv ely reduced sample size are smaller than the impro v emen ts in precision and accuracy (e.g., weigh ting by inv erse-squared uncertainties can impro v e b oth precision and accuracy at low S/ N ratios). Also, weigh ting might exploit correlations in the data to impro v e precision, as it is sho wn emplo ying phase w eigh ts (Rimoldini, 2013a). Since correlated data do not satisfy the assumptions of the expressions deriv ed herein, their application migh t return biased results. Ho w ev er, small biases could b e justified if improv ements in precision are significan t and, dep ending on the extent of the application, larger biases could b e mitigated with mixed weigh ting sc hemes, such as the one describ ed b y Eqs (40)–(44). Estimators deriv ed herein assume a single weigh ting sc heme and combinations of estimators (like the v ariance and the mean in the standardized sk ewness and kurtosis) are exp ected to apply the same w eights to terms associated with the same measurements. The function h ( S/ N | a, b ) constitutes just an example to achiev e a mixed weigh ting scheme: tuning parameters a, b offer the p ossibility to control the transition from error-w eigh ted to phase-w eigh ted estimators (in the limits of lo w and high S/ N , resp ectiv ely) and th us reac h a compromise solution b etw een precision and accuracy for all v alues of S/ N , according to the sp ecific estimators, signals, sampling, errors, sample sizes and their distributions in the data. Skewness and kurtosis unbiased by Gaussian uncertainties page 6 of 36 0.0 0.2 0.4 0.6 0.8 1.0 −1.0 −0.5 0.0 0.5 1.0 1.5 Phase ( φ / 2 π ) Signal and simulated data S/N = 2, n = 100 Figure 1: A sim ulated signal of the form of sin 4 φ (blue curv e) is irregularly sampled b y 100 measurements (denoted by triangles) with S/ N = 2. 7.2 Results The results of sim ulations are illustrated for sample estimators, since the conclusions in Rimoldini (2013b) suggested that phase-w eigh ted sample estimators can be more accurate and precise than the sample-size un biased counterparts in most cases, esp ecially for large sample sizes as considered herein. Figure 2 illustrates the sample mean in the v arious scenarios considered in the sim ulations: sample sizes of n = 100 and 1000, un w eigh ted and with differen t weigh ting sc hemes (error-w eigh ted, phase- w eigh ted and combined error-phase weigh ted). While accuracy is the same in all cases, the b est precision of the mean is achiev ed emplo ying phase w eigh ts (including the lo w S/ N end, unlik e other estimators). Figures 3 – 16 compare noise-biased ( ‘unc orr e cte d’ ) and noise-unbiased ( ‘c orr e cte d’ ) estimators as a function of S / N , ev aluating the following deviations from the p opulation v alues: m 2 /µ 2 − 1 vs m ∗ 2 /µ 2 − 1 , (45) m 3 /µ 3 / 2 2 − γ 1 vs m ∗ 3 /µ 3 / 2 2 − γ 1 , g 1 − γ 1 vs g ∗ 1 − γ 1 , (46) m 4 /µ 2 2 − 3 − γ 2 vs m ∗ 4 /µ 2 2 − 3 − γ 2 , m 4 /m 2 2 − 3 − γ 2 vs m ∗ 4 / ( m ∗ 2 ) 2 − 3 − γ 2 , (47) k 4 /µ 2 2 − γ 2 vs k ∗ 4 /µ 2 2 − γ 2 , g 2 − γ 2 vs g ∗ 2 − γ 2 , (48) in b oth w eigh ted and unw eigh ted cases, for n = 100 and 1000. The dep endence on n is describ ed in more details in Rimoldini (2013b). Estimators standardized by b oth true and estimated v ariance are presented to help in terpret the b ehaviour of the ratios from their components. All figures confirm that ‘corrected’ and ‘uncorrected’ estimators ha v e similar precision and accuracy at high S/ N lev els (t ypically for S/ N > 10). Noise-unbiased estimators are found to be the most accurate in all cases and ov er the whole S/ N range tested. Their precision is generally similar to the noise-uncorrected coun terparts, apart from estimators standardized by the estimated v ariance, suc h as g 1 , g 2 and m 4 /m 2 2 , for whic h the uncorrected v ersion can be muc h more precise (although biased) for S/ N < 2, typically . As expected, the precision of estimators employing n = 1000 measuremen ts per sample was greater than the one obtained with sample sizes of n = 100. W eighting by the inv erse of squared measurement errors made the estimators sligh tly less precise at high S/ N ratios, but more precise and accurate at low S/ N levels (except for the mean). W eighting b y phase in terv als led to a significan t impro vemen t in precision of all estimators in the limit of large S/ N ratios and a reduction of precision at lo w S / N (apart from the case of the mean). T uning parameters such as a = 2 and b = 0 . 3 in Eq. (40) were able to mitigate the imprecision at lo w S/ N Skewness and kurtosis unbiased by Gaussian uncertainties page 7 of 36 reducing to the error-w eigh ted results, whic h appeared to b e the most accurate and precise in the limit of low S/ N ratios (in these simulations). This solution might provide a reasonable compromise b etw een precision and accuracy of all estimators, at least for S/ N > 1. Figures 5 – 8 sho w that the skewness moment m 3 is quite un biased by noise, while the standardized v ersion g 1 is underestimated at high S/ N b ecause of the ov erestimated v ariance m 2 (as shown in Figs 3–4). While the accuracy of g 1 deteriorates at lo w S/ N , its precision is muc h less affected b y noise. The kurtosis moment m 4 (Figs 9 – 12) is less precise and accurate than the noise-un biased equiv alent, and its normalization b y the squared v ariance reduces dramatically its inaccuracy and imprecision (since m 2 and m 4 exhibit a similar trend as a function of S/ N ). The kurtosis cum ulan t k 4 , instead, is muc h closer to its noise-unbiased counterpart, as shown in Figs 13 – 16. The normalization of k 4 b y the squared v ariance impro v es its precision at the cost of low er accuracy for S/ N < 10: the bias of g 2 is similar to (greater than) the precision of g ∗ 2 for n = 100 ( n = 1000). The low er the S/ N level is, the less precise estimators are and the noise-unbiased v ariance can b e underestimated (and ev en b ecome non-p ositiv e). Thus, the skewness and kurtosis estimators standardized b y k ∗ 2 or K ∗ 2 , as in Eqs (34)–(35), should b e a v oided in circumstances that combine small sample sizes (up to a few dozens of elements) and low S/N ratios (of the order of a few or less). Figures related to moments and cumulan ts of irregularly sampled sinusoidal signals are very similar to the ones presented herein, with the exception of g 1 , which would ha v e a similar precision but with no bias, as a consequence of the null sk ewness of a sinusoidal signal (since the mean of k 3 estimates is zero, they are not biased by the standardization with an ov erestimated noise-biased v ariance). F rom the comparison of noise-biased and unbiased estimators with different weigh ting schemes, it ap- p ears that, for large sample sizes, noise-un biased phase-w eighted estimators are usually the most accurate for S/ N > 2 (apart from the sp ecial cases of standardized sk ewness and kurtosis when their true v alue is zero). F or noisy signals (e.g., S/ N < 2), error weigh ting seems the most appropriate, at least with Gaussian uncertainties, thus noise-unbiase d err or-phase weighte d estimators c an pr ovide a satisfactory c ompr omise in gener al . F urther improv emen ts might b e ac hiev ed b y tuning parameters better fitted to estimators and signals of interest, in view of sp ecific requirements of precision and accuracy . 8 Conclusions Exact expressions of noise-unbiased skewness and kurtosis were pro vided in the unw eigh ted and weigh ted form ulations, under the assumption of indep endent data and Gaussian uncertainties. Such estimators can b e particularly useful in the pro cessing, in terpretation and comparison of data characterized by low S/ N regimes. Sim ulations of an irregularly sampled sk ew ed p erio dic signal were employ ed to compare noise-biased and unbiased estimators as a function of S/ N in the un w eigh ted, inv erse-squared error weigh ted and phase-w eigh ted schemes. While noise-unbiased estimators w ere found more accurate in general, they w ere less precise than the uncorrected counterparts at low S/ N ratios. The application of a mixed w eigh ting sc heme in v olving phase in terv als and uncertainties was able to balance precision and accuracy on a wide range of S/ N levels. The effect of noise-unbiased estimators and different weigh ting schemes on the c haracterization and classification of astronomical time series is describ ed in Rimoldini (2013a). Ac knowledgmen ts The author thanks M. S ¨ uv eges for many discussions and v aluable comments on the original manuscript. References Bo wley A.L., 1920, Elemen ts of Statistics, Charles Scribner’s Sons, New Y ork D’Agostino R.B., 1986, Go o dness-of-fit techniques, D’Agostino & Stephens eds., Marcel Dekker, New Y ork, p. 367 Gro enev eld R.A., Meeden G., 1984, The Statistician, 33, 391 Skewness and kurtosis unbiased by Gaussian uncertainties page 8 of 36 Heijmans R., 1999, Statistical Papers, 40, 107 Hosking J.R.M., 1990, J. R. Statist. So c. B, 52, 105 Mo ors J.J.A., W agemak ers R.Th.A., Co enen V.M.J., Heuts R.M.J., Janssens M.J.B.T., 1996, Statistica Neerlandica, 50, 417 Rimoldini L., 2013a, preprint Rimoldini L., 2013b, preprint Stuart A., Ord J., 1969, Kendall’s Adv anced Theory of Statistics, Charles Griffin & Co. Ltd, London Skewness and kurtosis unbiased by Gaussian uncertainties page 9 of 36 Mean ( n = 100 , 1000) Un w eigh ted −0.2 −0.1 0.0 0.1 0.2 0.3 0.4 0.0 0.2 0.4 0.6 0.8 1.0 (S/N) − 1 mean / µ − 1 n = 100 n = 1000 Phase W eighted ( a, b → 0) −0.2 −0.1 0.0 0.1 0.2 0.3 0.4 0.0 0.2 0.4 0.6 0.8 1.0 (S/N) − 1 mean / µ − 1 n = 100 n = 1000 Error W eighted −0.2 −0.1 0.0 0.1 0.2 0.3 0.4 0.0 0.2 0.4 0.6 0.8 1.0 (S/N) − 1 mean / µ − 1 n = 100 n = 1000 Error-Phase W eighted ( a = 2 , b = 0 . 3) −0.2 −0.1 0.0 0.1 0.2 0.3 0.4 0.0 0.2 0.4 0.6 0.8 1.0 (S/N) − 1 mean / µ − 1 n = 100 n = 1000 Figure 2: Sample mean for S/ N > 1 and n = 100 , 1000: unw eigh ted on the top-left hand side, w eighted b y the inv erse of squared measurement errors on the top-right hand side, and weigh ted b y phases and errors, according to Eq. (40), with differen t parameter v alues, as sp ecified ab ov e the low er panels. Shaded areas encompass one standard deviation from the av erage of the distribution of the mean employing simulations defined by Eqs (37)–(39). Skewness and kurtosis unbiased by Gaussian uncertainties page 10 of 36 V ariance ( n = 100) Un w eigh ted −0.5 0.0 0.5 1.0 1.5 0.0 0.2 0.4 0.6 0.8 1.0 (S/N) − 1 m 2 ( * ) / µ 2 − 1 Corrected Uncorrected Phase W eighted ( a, b → 0) −0.5 0.0 0.5 1.0 1.5 0.0 0.2 0.4 0.6 0.8 1.0 (S/N) − 1 m 2 ( * ) / µ 2 − 1 Corrected Uncorrected Error W eighted −0.5 0.0 0.5 1.0 1.5 0.0 0.2 0.4 0.6 0.8 1.0 (S/N) − 1 m 2 ( * ) / µ 2 − 1 Corrected Uncorrected Error-Phase W eighted ( a = 2 , b = 0 . 3) −0.5 0.0 0.5 1.0 1.5 0.0 0.2 0.4 0.6 0.8 1.0 (S/N) − 1 m 2 ( * ) / µ 2 − 1 Corrected Uncorrected Figure 3: Noise-biased ( ‘unc orr e cte d’ ) v ersus noise-unbiased ( ‘c orr e cte d’ ) sample v ariance for S/ N > 1 and n = 100: unw eighted on the top-left hand side, weigh ted b y the in v erse of squared measurement errors on the top-righ t hand side, and weigh ted by phases and errors, according to Eq. (40), with differen t parameter v alues, as sp ecified ab ov e the low er panels. Shaded areas encompass one standard deviation from the mean of the distribution of the v ariance employing sim ulations defined b y Eqs (37)–(39). Skewness and kurtosis unbiased by Gaussian uncertainties page 11 of 36 V ariance ( n = 1000) Un w eigh ted −0.5 0.0 0.5 1.0 1.5 0.0 0.2 0.4 0.6 0.8 1.0 (S/N) − 1 m 2 ( * ) / µ 2 − 1 Corrected Uncorrected Phase W eighted ( a, b → 0) −0.5 0.0 0.5 1.0 1.5 0.0 0.2 0.4 0.6 0.8 1.0 (S/N) − 1 m 2 ( * ) / µ 2 − 1 Corrected Uncorrected Error W eighted −0.5 0.0 0.5 1.0 1.5 0.0 0.2 0.4 0.6 0.8 1.0 (S/N) − 1 m 2 ( * ) / µ 2 − 1 Corrected Uncorrected Error-Phase W eighted ( a = 2 , b = 0 . 3) −0.5 0.0 0.5 1.0 1.5 0.0 0.2 0.4 0.6 0.8 1.0 (S/N) − 1 m 2 ( * ) / µ 2 − 1 Corrected Uncorrected Figure 4: Noise-biased ( ‘unc orr e cte d’ ) v ersus noise-unbiased ( ‘c orr e cte d’ ) sample v ariance for S/ N > 1 and n = 1000: unw eighted on the top-left hand side, weigh ted by the inv erse of squared measurement errors on the top-righ t hand side, and weigh ted by phases and errors, according to Eq. (40), with differen t parameter v alues, as sp ecified ab ov e the low er panels. Shaded areas encompass one standard deviation from the mean of the distribution of the v ariance employing sim ulations defined b y Eqs (37)–(39). Skewness and kurtosis unbiased by Gaussian uncertainties page 12 of 36 Sk ewness ( n = 100) Un w eigh ted −1.0 −0.5 0.0 0.5 1.0 0.0 0.2 0.4 0.6 0.8 1.0 (S/N) − 1 m 3 ( * ) / µ 2 3 2 − γ 1 Corrected Uncorrected Error W eighted −1.0 −0.5 0.0 0.5 1.0 0.0 0.2 0.4 0.6 0.8 1.0 (S/N) − 1 m 3 ( * ) / µ 2 3 2 − γ 1 Corrected Uncorrected Un w eigh ted −1.0 −0.5 0.0 0.5 1.0 0.0 0.2 0.4 0.6 0.8 1.0 (S/N) − 1 g 1 ( * ) − γ 1 Corrected Uncorrected Error W eighted −1.0 −0.5 0.0 0.5 1.0 0.0 0.2 0.4 0.6 0.8 1.0 (S/N) − 1 g 1 ( * ) − γ 1 Corrected Uncorrected Figure 5: Noise-biased ( ‘unc orr e cte d’ ) versus noise-unbiased ( ‘c orr e cte d’ ) sample skewness for S/ N > 1 and n = 100: unw eighted in the upp er panels and w eigh ted b y the inv erse of squared measurement errors in the low er panels. Shaded areas encompass one standard deviation from the mean of the distribution of the sk ewness emplo ying simulations defined by Eqs (37)–(39). Skewness and kurtosis unbiased by Gaussian uncertainties page 13 of 36 Sk ewness ( n = 100) Phase W eighted ( a, b → 0) −1.0 −0.5 0.0 0.5 1.0 0.0 0.2 0.4 0.6 0.8 1.0 (S/N) − 1 m 3 ( * ) / µ 2 3 2 − γ 1 Corrected Uncorrected Error-Phase W eighted ( a = 2 , b = 0 . 3) −1.0 −0.5 0.0 0.5 1.0 0.0 0.2 0.4 0.6 0.8 1.0 (S/N) − 1 m 3 ( * ) / µ 2 3 2 − γ 1 Corrected Uncorrected Phase W eighted ( a, b → 0) −1.0 −0.5 0.0 0.5 1.0 0.0 0.2 0.4 0.6 0.8 1.0 (S/N) − 1 g 1 ( * ) − γ 1 Corrected Uncorrected Error-Phase W eighted ( a = 2 , b = 0 . 3) −1.0 −0.5 0.0 0.5 1.0 0.0 0.2 0.4 0.6 0.8 1.0 (S/N) − 1 g 1 ( * ) − γ 1 Corrected Uncorrected Figure 6: Noise-biased ( ‘unc orr e cte d’ ) versus noise-unbiased ( ‘c orr e cte d’ ) sample skewness for S/ N > 1 and n = 100, w eigh ted by phases and errors, according to Eq. (40), with different parameter v alues, as sp ecified ab ov e each panel. Shaded areas encompass one standard deviation from the mean of the distribution of the skewness employing simulations defined by Eqs (37)–(39). Skewness and kurtosis unbiased by Gaussian uncertainties page 14 of 36 Sk ewness ( n = 1000) Un w eigh ted −1.0 −0.5 0.0 0.5 1.0 0.0 0.2 0.4 0.6 0.8 1.0 (S/N) − 1 m 3 ( * ) / µ 2 3 2 − γ 1 Corrected Uncorrected Error W eighted −1.0 −0.5 0.0 0.5 1.0 0.0 0.2 0.4 0.6 0.8 1.0 (S/N) − 1 m 3 ( * ) / µ 2 3 2 − γ 1 Corrected Uncorrected Un w eigh ted −1.0 −0.5 0.0 0.5 1.0 0.0 0.2 0.4 0.6 0.8 1.0 (S/N) − 1 g 1 ( * ) − γ 1 Corrected Uncorrected Error W eighted −1.0 −0.5 0.0 0.5 1.0 0.0 0.2 0.4 0.6 0.8 1.0 (S/N) − 1 g 1 ( * ) − γ 1 Corrected Uncorrected Figure 7: Noise-biased ( ‘unc orr e cte d’ ) versus noise-unbiased ( ‘c orr e cte d’ ) sample skewness for S/ N > 1 and n = 1000: unw eigh ted in the upper panels and w eigh ted by the inv erse of squared measuremen t errors in the low er panels. Shaded areas encompass one standard deviation from the mean of the distribution of the sk ewness emplo ying simulations defined by Eqs (37)–(39). Skewness and kurtosis unbiased by Gaussian uncertainties page 15 of 36 Sk ewness ( n = 1000) Phase W eighted ( a, b → 0) −1.0 −0.5 0.0 0.5 1.0 0.0 0.2 0.4 0.6 0.8 1.0 (S/N) − 1 m 3 ( * ) / µ 2 3 2 − γ 1 Corrected Uncorrected Error-Phase W eighted ( a = 2 , b = 0 . 3) −1.0 −0.5 0.0 0.5 1.0 0.0 0.2 0.4 0.6 0.8 1.0 (S/N) − 1 m 3 ( * ) / µ 2 3 2 − γ 1 Corrected Uncorrected Phase W eighted ( a, b → 0) −1.0 −0.5 0.0 0.5 1.0 0.0 0.2 0.4 0.6 0.8 1.0 (S/N) − 1 g 1 ( * ) − γ 1 Corrected Uncorrected Error-Phase W eighted ( a = 2 , b = 0 . 3) −1.0 −0.5 0.0 0.5 1.0 0.0 0.2 0.4 0.6 0.8 1.0 (S/N) − 1 g 1 ( * ) − γ 1 Corrected Uncorrected Figure 8: Noise-biased ( ‘unc orr e cte d’ ) versus noise-unbiased ( ‘c orr e cte d’ ) sample skewness for S/ N > 1 and n = 1000, weigh ted by phases and errors, according to Eq. (40), with different parameter v alues, as sp ecified ab ov e each panel. Shaded areas encompass one standard deviation from the mean of the distribution of the skewness employing simulations defined by Eqs (37)–(39). Skewness and kurtosis unbiased by Gaussian uncertainties page 16 of 36 Kurtosis ( n = 100) Un w eigh ted −5 0 5 10 15 0.0 0.2 0.4 0.6 0.8 1.0 (S/N) − 1 m 4 ( * ) / µ 2 2 − 3 − γ 2 Corrected Uncorrected Error W eighted −5 0 5 10 15 0.0 0.2 0.4 0.6 0.8 1.0 (S/N) − 1 m 4 ( * ) / µ 2 2 − 3 − γ 2 Corrected Uncorrected Un w eigh ted −5 0 5 10 15 0.0 0.2 0.4 0.6 0.8 1.0 (S/N) − 1 m 4 ( * ) / m 2 ( * )2 − 3 − γ 2 Corrected Uncorrected Error W eighted −5 0 5 10 15 0.0 0.2 0.4 0.6 0.8 1.0 (S/N) − 1 m 4 ( * ) / m 2 ( * )2 − 3 − γ 2 Corrected Uncorrected Figure 9: Noise-biased ( ‘unc orr e cte d’ ) versus noise-unbiased ( ‘c orr e cte d’ ) sample kurtosis moment for S/ N > 1 and n = 100: unw eighted in the upp er panels and weigh ted b y the inv erse of squared measure- men t errors in the lo w er panels. Shaded areas encompass one standard deviation from the mean of the distribution of the kurtosis employing sim ulations defined by Eqs (37)–(39). Skewness and kurtosis unbiased by Gaussian uncertainties page 17 of 36 Kurtosis ( n = 100) Phase W eighted ( a, b → 0) −5 0 5 10 15 0.0 0.2 0.4 0.6 0.8 1.0 (S/N) − 1 m 4 ( * ) / µ 2 2 − 3 − γ 2 Corrected Uncorrected Error-Phase W eighted ( a = 2 , b = 0 . 3) −5 0 5 10 15 0.0 0.2 0.4 0.6 0.8 1.0 (S/N) − 1 m 4 ( * ) / µ 2 2 − 3 − γ 2 Corrected Uncorrected Phase W eighted ( a, b → 0) −5 0 5 10 15 0.0 0.2 0.4 0.6 0.8 1.0 (S/N) − 1 m 4 ( * ) / m 2 ( * )2 − 3 − γ 2 Corrected Uncorrected Error-Phase W eighted ( a = 2 , b = 0 . 3) −5 0 5 10 15 0.0 0.2 0.4 0.6 0.8 1.0 (S/N) − 1 m 4 ( * ) / m 2 ( * )2 − 3 − γ 2 Corrected Uncorrected Figure 10: Noise-biased ( ‘unc orr e cte d’ ) v ersus noise-unbiased ( ‘c orr e cte d’ ) sample kurtosis momen t for S/ N > 1 and n = 100, w eigh ted by phases and errors, according to Eq. (40), with different parameter v alues, as sp ecified ab ov e eac h panel. Shaded areas encompass one standard deviation from the mean of the distribution of the kurtosis emplo ying simulations defined by Eqs (37)–(39). Skewness and kurtosis unbiased by Gaussian uncertainties page 18 of 36 Kurtosis ( n = 1000) Un w eigh ted −5 0 5 10 15 0.0 0.2 0.4 0.6 0.8 1.0 (S/N) − 1 m 4 ( * ) / µ 2 2 − 3 − γ 2 Corrected Uncorrected Error W eighted −5 0 5 10 15 0.0 0.2 0.4 0.6 0.8 1.0 (S/N) − 1 m 4 ( * ) / µ 2 2 − 3 − γ 2 Corrected Uncorrected Un w eigh ted −5 0 5 10 15 0.0 0.2 0.4 0.6 0.8 1.0 (S/N) − 1 m 4 ( * ) / m 2 ( * )2 − 3 − γ 2 Corrected Uncorrected Error W eighted −5 0 5 10 15 0.0 0.2 0.4 0.6 0.8 1.0 (S/N) − 1 m 4 ( * ) / m 2 ( * )2 − 3 − γ 2 Corrected Uncorrected Figure 11: Noise-biased ( ‘unc orr e cte d’ ) v ersus noise-unbiased ( ‘c orr e cte d’ ) sample kurtosis momen t for S/ N > 1 and n = 1000: un w eigh ted in the upp er panels and weigh ted by the inv erse of squared mea- suremen t errors in the low er panels. Shaded areas encompass one standard deviation from the mean of the distribution of the kurtosis emplo ying simulations defined by Eqs (37)–(39). Skewness and kurtosis unbiased by Gaussian uncertainties page 19 of 36 Kurtosis ( n = 1000) Phase W eighted ( a, b → 0) −5 0 5 10 15 0.0 0.2 0.4 0.6 0.8 1.0 (S/N) − 1 m 4 ( * ) / µ 2 2 − 3 − γ 2 Corrected Uncorrected Error-Phase W eighted ( a = 2 , b = 0 . 3) −5 0 5 10 15 0.0 0.2 0.4 0.6 0.8 1.0 (S/N) − 1 m 4 ( * ) / µ 2 2 − 3 − γ 2 Corrected Uncorrected Phase W eighted ( a, b → 0) −5 0 5 10 15 0.0 0.2 0.4 0.6 0.8 1.0 (S/N) − 1 m 4 ( * ) / m 2 ( * )2 − 3 − γ 2 Corrected Uncorrected Error-Phase W eighted ( a = 2 , b = 0 . 3) −5 0 5 10 15 0.0 0.2 0.4 0.6 0.8 1.0 (S/N) − 1 m 4 ( * ) / m 2 ( * )2 − 3 − γ 2 Corrected Uncorrected Figure 12: Noise-biased ( ‘unc orr e cte d’ ) v ersus noise-unbiased ( ‘c orr e cte d’ ) sample kurtosis momen t for S/ N > 1 and n = 1000, weigh ted by phases and errors, according to Eq. (40), with different parameter v alues, as sp ecified ab ov e eac h panel. Shaded areas encompass one standard deviation from the mean of the distribution of the kurtosis emplo ying simulations defined by Eqs (37)–(39). Skewness and kurtosis unbiased by Gaussian uncertainties page 20 of 36 k- Kurtosis ( n = 100) Un w eigh ted −3 −2 −1 0 1 2 3 0.0 0.2 0.4 0.6 0.8 1.0 (S/N) − 1 k 4 ( * ) / µ 2 2 − γ 2 Corrected Uncorrected Error W eighted −3 −2 −1 0 1 2 3 0.0 0.2 0.4 0.6 0.8 1.0 (S/N) − 1 k 4 ( * ) / µ 2 2 − γ 2 Corrected Uncorrected Un w eigh ted −3 −2 −1 0 1 2 3 0.0 0.2 0.4 0.6 0.8 1.0 (S/N) − 1 g 2 ( * ) − γ 2 Corrected Uncorrected Error W eighted −3 −2 −1 0 1 2 3 0.0 0.2 0.4 0.6 0.8 1.0 (S/N) − 1 g 2 ( * ) − γ 2 Corrected Uncorrected Figure 13: Noise-biased ( ‘unc orr e cte d’ ) versus noise-un biased ( ‘c orr e cte d’ ) sample kurtosis cum ulant for S/ N > 1 and n = 100: unw eigh ted in the upp er panels and weigh ted by the inv erse of squared measuremen t errors in the lo w er panels. Shaded areas encompass one standard deviation from the mean of the distribution of the kurtosis employing sim ulations defined by Eqs (37)–(39). Skewness and kurtosis unbiased by Gaussian uncertainties page 21 of 36 k- Kurtosis ( n = 100) Phase W eighted ( a, b → 0) −3 −2 −1 0 1 2 3 0.0 0.2 0.4 0.6 0.8 1.0 (S/N) − 1 k 4 ( * ) / µ 2 2 − γ 2 Corrected Uncorrected Error-Phase W eighted ( a = 2 , b = 0 . 3) −3 −2 −1 0 1 2 3 0.0 0.2 0.4 0.6 0.8 1.0 (S/N) − 1 k 4 ( * ) / µ 2 2 − γ 2 Corrected Uncorrected Phase W eighted ( a, b → 0) −3 −2 −1 0 1 2 3 0.0 0.2 0.4 0.6 0.8 1.0 (S/N) − 1 g 2 ( * ) − γ 2 Corrected Uncorrected Error-Phase W eighted ( a = 2 , b = 0 . 3) −3 −2 −1 0 1 2 3 0.0 0.2 0.4 0.6 0.8 1.0 (S/N) − 1 g 2 ( * ) − γ 2 Corrected Uncorrected Figure 14: Noise-biased ( ‘unc orr e cte d’ ) versus noise-un biased ( ‘c orr e cte d’ ) sample kurtosis cumulan t for S/ N > 1 and n = 100, w eigh ted by phases and errors, according to Eq. (40), with different parameter v alues, as sp ecified ab ov e eac h panel. Shaded areas encompass one standard deviation from the mean of the distribution of the kurtosis emplo ying simulations defined by Eqs (37)–(39). Skewness and kurtosis unbiased by Gaussian uncertainties page 22 of 36 k- Kurtosis ( n = 1000) Un w eigh ted −3 −2 −1 0 1 2 3 0.0 0.2 0.4 0.6 0.8 1.0 (S/N) − 1 k 4 ( * ) / µ 2 2 − γ 2 Corrected Uncorrected Error W eighted −3 −2 −1 0 1 2 3 0.0 0.2 0.4 0.6 0.8 1.0 (S/N) − 1 k 4 ( * ) / µ 2 2 − γ 2 Corrected Uncorrected Un w eigh ted −3 −2 −1 0 1 2 3 0.0 0.2 0.4 0.6 0.8 1.0 (S/N) − 1 g 2 ( * ) − γ 2 Corrected Uncorrected Error W eighted −3 −2 −1 0 1 2 3 0.0 0.2 0.4 0.6 0.8 1.0 (S/N) − 1 g 2 ( * ) − γ 2 Corrected Uncorrected Figure 15: Noise-biased ( ‘unc orr e cte d’ ) versus noise-un biased ( ‘c orr e cte d’ ) sample kurtosis cum ulant for S/ N > 1 and n = 1000: unw eighted in the upp er panels and weigh ted by the in v erse of squared measuremen t errors in the lo w er panels. Shaded areas encompass one standard deviation from the mean of the distribution of the kurtosis employing sim ulations defined by Eqs (37)–(39). Skewness and kurtosis unbiased by Gaussian uncertainties page 23 of 36 k- Kurtosis ( n = 1000) Phase W eighted ( a, b → 0) −3 −2 −1 0 1 2 3 0.0 0.2 0.4 0.6 0.8 1.0 (S/N) − 1 k 4 ( * ) / µ 2 2 − γ 2 Corrected Uncorrected Error-Phase W eighted ( a = 2 , b = 0 . 3) −3 −2 −1 0 1 2 3 0.0 0.2 0.4 0.6 0.8 1.0 (S/N) − 1 k 4 ( * ) / µ 2 2 − γ 2 Corrected Uncorrected Phase W eighted ( a, b → 0) −3 −2 −1 0 1 2 3 0.0 0.2 0.4 0.6 0.8 1.0 (S/N) − 1 g 2 ( * ) − γ 2 Corrected Uncorrected Error-Phase W eighted ( a = 2 , b = 0 . 3) −3 −2 −1 0 1 2 3 0.0 0.2 0.4 0.6 0.8 1.0 (S/N) − 1 g 2 ( * ) − γ 2 Corrected Uncorrected Figure 16: Noise-biased ( ‘unc orr e cte d’ ) versus noise-un biased ( ‘c orr e cte d’ ) sample kurtosis cumulan t for S/ N > 1 and n = 1000, weigh ted by phases and errors, according to Eq. (40), with different parameter v alues, as sp ecified ab ov e eac h panel. Shaded areas encompass one standard deviation from the mean of the distribution of the kurtosis emplo ying simulations defined by Eqs (37)–(39). Skewness and kurtosis unbiased by Gaussian uncertainties page 24 of 36 A Deriv ation of noise-un biased momen ts The deriv ations presen ted in this App endix inv olve weigh ted estimators under the assumption of inde- p enden t measurements, uncertainties and weigh ts. Definitions and some of the relations often emplo y ed herein are listed b elow. • F or brevity , m r = m r ( x ), and P i and Q i are implied to inv olve all (from the 1-st to the n -th) terms, unless explicitly stated otherwise. • The following integral solutions are often emplo y ed: h x s i i = Z ∞ −∞ x 0 i s √ 2 π i exp − ( x 0 i − ξ i ) 2 2 2 i d x 0 i = ξ i for s = 1 ξ 2 i + 2 i for s = 2 ξ 3 i + 3 ξ i 2 i for s = 3 ξ 4 i + 6 ξ 2 i 2 i + 3 4 i for s = 4 . (49) • The expected v alue h m i of a generic estimator m ( x ) = P i a i x s i P j 6 = i b j x t j P k 6 = i,j c k x u k P l 6 = i,j,k d l x v l of indep endent data with Gaussian uncertainties is computed as follo ws h m i = Z R n m ( x 0 ) n Y i =1 1 √ 2 π i exp − ( x 0 i − ξ i ) 2 2 2 i d n x 0 (50) = Y h Z ∞ −∞ m ( x 0 ) 1 √ 2 π h exp − ( x 0 h − ξ h ) 2 2 2 h d x 0 h (51) = X i a i Z ∞ −∞ x 0 i s √ 2 π i exp − ( x 0 i − ξ i ) 2 2 2 i d x 0 i X j 6 = i b j Z ∞ −∞ x 0 j t √ 2 π j exp " − ( x 0 j − ξ j ) 2 2 2 j # d x 0 j × × X k 6 = i,j c k Z ∞ −∞ x 0 k u √ 2 π k exp − ( x 0 k − ξ k ) 2 2 2 k d x 0 k X l 6 = i,j,k d l Z ∞ −∞ x 0 l v √ 2 π l exp − ( x 0 l − ξ l ) 2 2 2 l d x 0 l . (52) • The results of the follo wing expressions are emplo y ed: ( P i w i x i ) 3 = = P i w i x i ( P j w j x j ) 2 = P i w i x i ( P j w 2 j x 2 j + P j w j x j P k 6 = j w k x k ) = P i w 3 i x 3 i + 3 P i w 2 i x 2 i P j 6 = i w j x j + P i w i x i P j 6 = i w j x j P k 6 = i,j w k x k . ( P i w i x i ) 4 = = P i w i x i P j w j x j ( P k w 2 k x 2 k + P k w k x k P l 6 = k w l x l ) = P i w i x i ( P j w 3 j x 3 j + 3 P j w 2 j x 2 j P k 6 = j w k x k + P j w j x j P k 6 = j w k x k P l 6 = j,k w l x l ) = P i w 4 i x 4 i + 4 P i w 3 i x 3 i P j 6 = i w j x j + 6 P i w 2 i x 2 i P j 6 = i w j x j P k 6 = i,j w k x k + + 3 P i w 2 i x 2 i P j 6 = i w 2 j x 2 j + P i w i x i P j 6 = i w j x j P k 6 = i,j w k x k P l 6 = i,j,k w l x l . P i w i x 2 i ( P j w j x j ) 2 = = P i w i x 2 i ( P j w 2 j x 2 j + P j w j x j P k 6 = j w k x k ) = P i w 3 i x 4 i + P i w i x 2 i P j 6 = i w 2 j x 2 j + 2 P i w 2 i x 3 i P j 6 = i w j x j + P i w i x 2 i P j 6 = i w j x j P k 6 = i,j w k x k . P i w i 2 i P j 6 = i w j ξ j P k 6 = i,j w k ξ k = = P i w i 2 i P j w j ξ j P k w k ξ k − P i w i 2 i P j 6 = i w 2 j ξ 2 j − 2 P i w 2 i ξ i 2 i P j 6 = i w j ξ j − P i w 3 i ξ 2 i 2 i = V 2 1 ¯ ξ 2 P i w i 2 i − P i w i 2 i P j w 2 j ξ 2 j + P i w 3 i ξ 2 i 2 i − 2 V 1 ¯ ξ P i w 2 i ξ i 2 i + 2 P i w 3 i ξ 2 i 2 i − P i w 3 i ξ 2 i 2 i = V 2 1 ¯ ξ 2 P i w i 2 i − P i w i 2 i P j w 2 j ξ 2 j − 2 V 1 ¯ ξ P i w 2 i ξ i 2 i + 2 P i w 3 i ξ 2 i 2 i . Skewness and kurtosis unbiased by Gaussian uncertainties page 25 of 36 P i w 2 i 2 i P j 6 = i w j ξ j P k 6 = i,j w k ξ k = = P i w 2 i 2 i P j w j ξ j P k w k ξ k − P i w 2 i 2 i P j 6 = i w 2 j ξ 2 j − 2 P i w 3 i ξ i 2 i P j 6 = i w j ξ j − P i w 4 i ξ 2 i 2 i = V 2 1 ¯ ξ 2 P i w 2 i 2 i − P i w 2 i 2 i P j w 2 j ξ 2 j + P i w 4 i ξ 2 i 2 i − 2 V 1 ¯ ξ P i w 3 i ξ i 2 i + 2 P i w 4 i ξ 2 i 2 i − P i w 4 i ξ 2 i 2 i = V 2 1 ¯ ξ 2 P i w 2 i 2 i − P i w 2 i 2 i P j w 2 j ξ 2 j − 2 V 1 ¯ ξ P i w 3 i ξ i 2 i + 2 P i w 4 i ξ 2 i 2 i . A.1 Outline of results The expressions of the elements pursued along the deriv ation of noise-un biased estimators (detailed in Sec. A.2) are summarized b elow, following the notation introduced in Sections 2 and 3. h m 2 i = 1 V 1 X i w i ξ i − ¯ ξ 2 + 1 V 1 X i w i 2 i 1 − w i V 1 = h k 2 i (53) h m 3 i = 1 V 1 X i w i ξ i − ¯ ξ 3 + 3 V 1 X i w i 2 i ξ i − ¯ ξ 1 − 2 w i V 1 = h k 3 i (54) h m 4 i = 1 V 1 X i w i ξ i − ¯ ξ 4 + 6 V 1 X i w i 2 i ξ i − ¯ ξ 2 1 − 2 w i V 1 + 2 i 1 2 − 2 w i V 1 + 2 w 2 i V 2 1 + + 6 V 3 1 X i w 2 i 2 i X j w j ξ j − ¯ ξ 2 + X j w j 2 j 1 − 3 w j 2 V 1 (55) h m 2 2 i = " 1 V 1 X i w i ξ i − ¯ ξ 2 # 2 + 4 V 2 1 X i w 2 i 2 i ξ i − ¯ ξ 2 + 2 V 2 1 X i w i ξ i − ¯ ξ 2 X j w j 2 j 1 − w j V 1 + + 2 V 2 1 X i w 2 i 4 i 1 − 2 w i V 1 + 1 V 2 1 " X i w i 2 i 1 − w i V 1 # 2 + 2 V 4 1 X i w 2 i 2 i ! 2 (56) h k 4 i = h m 4 i − 3 h m 2 2 i (57) If f ( ξ , ) = X i c i ξ i − ¯ ξ , then f ∗ ( x , ) = X i c i ( x i − ¯ x ) . (58) If f ( ξ , ) = X i c i ξ i − ¯ ξ 2 , then f ∗ ( x , ) = X i c i ( x i − ¯ x ) 2 − 2 i 1 − 2 w i V 1 − 1 V 2 1 X j w 2 j 2 j . (59) m ∗ 2 = m 2 − 1 V 1 X i w i 2 i 1 − w i V 1 = k ∗ 2 (60) m ∗ 3 = m 3 − 3 V 1 X i w i 2 i ( x i − ¯ x ) 1 − 2 w i V 1 = k ∗ 3 (61) m ∗ 4 = m 4 − 6 V 1 X i w i 2 i " ( x i − ¯ x ) 2 1 − 2 w i V 1 − 2 i 2 1 − 2 w i V 1 2 + m ∗ 2 w i V 1 # − 3 V 4 1 X i w 2 i 2 i ! 2 (62) ( m 2 2 ) ∗ = ( m ∗ 2 ) 2 − 4 V 2 1 X i w 2 i 2 i ( x i − ¯ x ) 2 − 2 i 2 1 − 2 w i V 1 + 2 V 4 1 X i w 2 i 2 i ! 2 (63) k ∗ 4 = m ∗ 4 − 3 ( m 2 2 ) ∗ (64) Skewness and kurtosis unbiased by Gaussian uncertainties page 26 of 36 A.2 Detailed computations m 2 = 1 V 1 X i w i ( x i − ¯ x ) 2 (65) = 1 V 1 X i w i x 2 i − 2 V 1 ¯ x X i w i x i + ¯ x 2 (66) = 1 V 1 X i w i x 2 i − ¯ x 2 (67) = 1 V 1 X i w i x 2 i − 1 V 1 X i w i x i ! 2 (68) = 1 V 1 X i w i x 2 i − 1 V 2 1 X i w 2 i x 2 i − 1 V 2 1 X i w i x i X j 6 = i w j x j (69) m 3 = 1 V 1 X i w i ( x i − ¯ x ) 3 (70) = 1 V 1 X i w i x 3 i − 3 V 1 ¯ x X i w i x 2 i + 3 V 1 ¯ x 2 X i w i x i − ¯ x 3 (71) = 1 V 1 X i w i x 3 i − 3 V 1 ¯ x X i w i x 2 i + 2 ¯ x 3 (72) = 1 V 1 X i w i x 3 i − 3 V 2 1 X i w i x 2 i X j w j x j + 2 1 V 1 X i w i x i ! 3 (73) = 1 V 1 X i w i x 3 i − 3 V 2 1 X i w 2 i x 3 i + X i w i x 2 i X j 6 = i w j x j + + 2 V 3 1 X i w 3 i x 3 i + 3 X i w 2 i x 2 i X j 6 = i w j x j + X i w i x i X j 6 = i w j x j X k 6 = i,j w k x k (74) m 4 = 1 V 1 X i w i ( x i − ¯ x ) 4 (75) = 1 V 1 X i w i x 4 i − 4 V 1 ¯ x X i w i x 3 i + 6 V 1 ¯ x 2 X i w i x 2 i − 4 V 1 ¯ x 3 X i w i x i − ¯ x 4 (76) = 1 V 1 X i w i x 4 i − 4 V 1 ¯ x X i w i x 3 i + 6 V 1 ¯ x 2 X i w i x 2 i − 3 ¯ x 4 (77) = 1 V 1 X i w i x 4 i − 4 V 2 1 X i w i x 3 i X j w j x j + 6 V 3 1 X i w i x 2 i X j w j x j 2 − 3 V 4 1 X i w i x i ! 4 (78) = 1 V 1 X i w i x 4 i − 4 V 2 1 X i w 2 i x 4 i + X i w i x 3 i X j 6 = i w j x j + 6 V 3 1 X i w 3 i x 4 i + + X i w i x 2 i X j 6 = i w 2 j x 2 j + 2 X i w 2 i x 3 i X j 6 = i w j x j + X i w i x 2 i X j 6 = i w j x j X k 6 = i,j w k x k + Skewness and kurtosis unbiased by Gaussian uncertainties page 27 of 36 − 3 V 4 1 X i w 4 i x 4 i + 4 X i w 3 i x 3 i X j 6 = i w j x j + 6 X i w 2 i x 2 i X j 6 = i w j x j X k 6 = i,j w k x k + +3 X i w 2 i x 2 i X j 6 = i w 2 j x 2 j + X i w i x i X j 6 = i w j x j X k 6 = i,j w k x k X l 6 = i,j,k w l x l (79) m 2 2 = " 1 V 1 X i w i ( x i − ¯ x ) 2 # 2 (80) = 1 V 1 X i w i x 2 i − 1 V 1 X i w i x i ! 2 2 (81) = 1 V 2 1 X i w i x 2 i ! 2 − 2 V 3 1 X i w i x 2 i X j w j x j 2 + 1 V 4 1 X i w i x i ! 4 (82) = 1 V 2 1 X i w i x 2 i ! 2 − 2 V 3 1 X i w i x 2 i X j w j x j 2 + 1 V 4 1 X i w i x i ! 4 (83) = 1 V 2 1 X i w 2 i x 4 i + X i w i x 2 i X j 6 = i w j x 2 j − 2 V 3 1 X i w 3 i x 4 i + X i w i x 2 i X j 6 = i w 2 j x 2 j + +2 X i w 2 i x 3 i X j 6 = i w j x j + X i w i x 2 i X j 6 = i w j x j X k 6 = i,j w k x k + + 1 V 4 1 X i w 4 i x 4 i + 4 X i w 3 i x 3 i X j 6 = i w j x j + 6 X i w 2 i x 2 i X j 6 = i w j x j X k 6 = i,j w k x k + +3 X i w 2 i x 2 i X j 6 = i w 2 j x 2 j + X i w i x i X j 6 = i w j x j X k 6 = i,j w k x k X l 6 = i,j,k w l x l (84) h m 2 i = Y i Z ∞ −∞ m 2 ( x 0 ) 1 √ 2 π i exp − ( x 0 i − ξ i ) 2 2 2 i d x 0 i (85) = 1 V 1 X i w i ξ 2 i + 2 i − 1 V 2 1 X i w 2 i ξ 2 i + 2 i − 1 V 2 1 X i w i ξ i X j 6 = i w j ξ j (86) = 1 V 1 X i w i ξ 2 i + 1 V 1 X i w i 2 i − 1 V 2 1 X i w 2 i 2 i − 1 V 2 1 X i w 2 i ξ 2 i + 1 V 2 1 X i w i ξ i X j 6 = i w j ξ j (87) = 1 V 1 X i w i ξ 2 i + 1 V 1 X i w i 2 i 1 − w i V 1 − ¯ ξ 2 (88) = 1 V 1 X i w i ξ i − ¯ ξ 2 + 1 V 1 X i w i 2 i 1 − w i V 1 = h k 2 i (89) Skewness and kurtosis unbiased by Gaussian uncertainties page 28 of 36 h m 3 i = Y i Z ∞ −∞ m 3 ( x 0 ) 1 √ 2 π i exp − ( x 0 i − ξ i ) 2 2 2 i d x 0 i (90) = 1 V 1 X i w i ξ 3 i + 3 ξ i 2 i − 3 V 2 1 X i w 2 i ξ 3 i + 3 ξ i 2 i + X i w i ξ 2 i + 2 i X j 6 = i w j ξ j + + 2 V 3 1 X i w 3 i ξ 3 i + 3 ξ i 2 i + 3 X i w 2 i ξ 2 i + 2 i X j 6 = i w j ξ j + X i w i ξ i X j 6 = i w j ξ j X k 6 = i,j w k ξ k (91) = 1 V 1 X i w i ξ 3 i + 3 V 1 X i w i ξ i 2 i − 3 V 2 1 X i w 2 i ξ 3 i − 9 V 2 1 X i w 2 i ξ i 2 i − 3 V 2 1 X i w i ξ 2 i X j 6 = i w j ξ j + − 3 V 2 1 X i w i 2 i X j 6 = i w j ξ j + 2 V 3 1 X i w 3 i ξ 3 i + 6 V 3 1 X i w 3 i ξ i 2 i + 6 V 3 1 X i w 2 i ξ 2 i X j 6 = i w j ξ j + + 6 V 3 1 X i w 2 i 2 i X j 6 = i w j ξ j + 2 V 3 1 X i w i ξ i X j 6 = i w j ξ j X k 6 = i,j w k ξ k (92) = 1 V 1 X i w i ξ 3 i + 3 V 1 X i w i ξ i 2 i 1 − 3 w i V 1 − 3 V 1 ¯ ξ X i w i ξ 2 i − 3 V 2 1 X i w i 2 i X j 6 = i w j ξ j + + 2 ¯ ξ 3 + 6 V 2 1 ¯ ξ X i w 2 i 2 i (93) = 1 V 1 X i w i ξ i − ¯ ξ 3 + 3 V 1 X i w i 2 i ξ i − 3 w i V 1 ξ i + 2 w i V 1 ¯ ξ − 3 V 1 X i w i 2 i ¯ ξ − w i V 1 ξ i (94) = 1 V 1 X i w i ξ i − ¯ ξ 3 + 3 V 1 X i w i 2 i ξ i − ¯ ξ − 2 w i V 1 ξ i − ¯ ξ (95) = 1 V 1 X i w i ξ i − ¯ ξ 3 + 3 V 1 X i w i 2 i ξ i − ¯ ξ 1 − 2 w i V 1 = h k 3 i (96) Skewness and kurtosis unbiased by Gaussian uncertainties page 29 of 36 h m 4 i = Y i Z ∞ −∞ m 4 ( x 0 ) 1 √ 2 π i exp − ( x 0 i − ξ i ) 2 2 2 i d x 0 i (97) = 1 V 1 X i w i ξ 4 i + 6 ξ 2 i 2 i + 3 4 i − 4 V 2 1 X i w 2 i ξ 4 i + 6 ξ 2 i 2 i + 3 4 i + X i w i ξ 3 i + 3 ξ i 2 i X j 6 = i w j ξ j + + 6 V 3 1 X i w 3 i ξ 4 i + 6 ξ 2 i 2 i + 3 4 i + X i w i ξ 2 i + 2 i X j 6 = i w 2 j ξ 2 j + 2 j + +2 X i w 2 i ξ 3 i + 3 ξ i 2 i X j 6 = i w j ξ j + X i w i ξ 2 i + 2 i X j 6 = i w j ξ j X k 6 = i,j w k ξ k + − 3 V 4 1 X i w 4 i ξ 4 i + 6 ξ 2 i 2 i + 3 4 i + 4 X i w 3 i ξ 3 i + 3 ξ i 2 i X j 6 = i w j ξ j + + 6 X i w 2 i ξ 2 i + 2 i X j 6 = i w j ξ j X k 6 = i,j w k ξ k + 3 X i w 2 i ξ 2 i + 2 i X j 6 = i w 2 j ξ 2 j + 2 j + + X i w i ξ i X j 6 = i w j ξ j X k 6 = i,j w k ξ k X l 6 = i,j,k w l ξ l (98) = 1 V 1 X i w i ξ 4 i + 6 V 1 X i w i ξ 2 i 2 i + 3 V 1 X i w i 4 i − 4 V 2 1 X i w 2 i ξ 4 i − 24 V 2 1 X i w 2 i ξ 2 i 2 i − 12 V 2 1 X i w 2 i 4 i + − 4 V 2 1 X i w i ξ 3 i X j 6 = i w j ξ j − 12 V 2 1 X i w i ξ i 2 i X j 6 = i w j ξ j + 6 V 3 1 X i w 3 i ξ 4 i + 36 V 3 1 X i w 3 i ξ 2 i 2 i + + 18 V 3 1 X i w 3 i 4 i + 6 V 3 1 X i w i ξ 2 i X j 6 = i w 2 j ξ 2 j + 6 V 3 1 X i w i ξ 2 i X j 6 = i w 2 j 2 j + 6 V 3 1 X i w i 2 i X j 6 = i w 2 j ξ 2 j + + 6 V 3 1 X i w i 2 i X j 6 = i w 2 j 2 j + 12 V 3 1 X i w 2 i ξ 3 i X j 6 = i w j ξ j + 36 V 3 1 X i w 2 i ξ i 2 i X j 6 = i w j ξ j + + 6 V 3 1 X i w i ξ 2 i X j 6 = i w j ξ j X k 6 = i,j w k ξ k + 6 V 3 1 X i w i 2 i X j 6 = i w j ξ j X k 6 = i,j w k ξ k − 3 V 4 1 X i w 4 i ξ 4 i + − 18 V 4 1 X i w 4 i ξ 2 i 2 i − 9 V 4 1 X i w 4 i 4 i − 12 V 4 1 X i w 3 i ξ 3 i X j 6 = i w j ξ j − 36 V 4 1 X i w 3 i ξ i 2 i X j 6 = i w j ξ j + − 18 V 4 1 X i w 2 i ξ 2 i X j 6 = i w j ξ j X k 6 = i,j w k ξ k − 18 V 4 1 X i w 2 i 2 i X j 6 = i w j ξ j X k 6 = i,j w k ξ k + − 9 V 4 1 X i w 2 i ξ 2 i X j 6 = i w 2 j ξ 2 j − 9 V 4 1 X i w 2 i ξ 2 i X j 6 = i w 2 j 2 j − 9 V 4 1 X i w 2 i 2 i X j 6 = i w 2 j ξ 2 j + − 9 V 4 1 X i w 2 i 2 i X j 6 = i w 2 j 2 j − 3 V 4 1 X i w i ξ i X j 6 = i w j ξ j X k 6 = i,j w k ξ k X l 6 = i,j,k w l ξ l (99) Skewness and kurtosis unbiased by Gaussian uncertainties page 30 of 36 = 1 V 1 X i w i ξ i − ¯ ξ 4 + 6 V 1 X i w i 2 i ξ i − ¯ ξ 2 − 6 V 1 ¯ ξ 2 X i w i 2 i − 12 V 2 1 X i w 2 i ξ 2 i 2 i + + 3 V 1 X i w i 4 i − 12 V 2 1 X i w 2 i 4 i + 36 V 2 1 ¯ ξ X i w 2 i ξ i 2 i + 12 V 3 1 X i w 3 i 4 i + 6 V 3 1 X i w i 2 i X j w 2 j 2 j + + 6 V 3 1 X i w i ξ 2 i X j w 2 j 2 j + 6 V 3 1 X i w i 2 i X j w 2 j ξ 2 j − 12 V 3 1 X i w 3 i ξ 2 i 2 i + + 6 V 3 1 V 2 1 ¯ ξ 2 X i w i 2 i − X i w i 2 i X j w 2 j ξ 2 j − 2 V 1 ¯ ξ X i w 2 i ξ i 2 i + 2 X i w 3 i ξ 2 i 2 i + − 18 V 4 1 X i w 2 i 2 i X j w 2 j ξ 2 j − 9 V 4 1 X i w 2 i 2 i ! 2 − 36 V 3 1 ¯ ξ X i w 3 i ξ i 2 i + 36 V 4 1 X i w 4 i ξ 2 i 2 i + − 18 V 4 1 V 2 1 ¯ ξ 2 X i w 2 i 2 i − X i w 2 i 2 i X j w 2 j ξ 2 j − 2 V 1 ¯ ξ X i w 3 i ξ i 2 i + 2 X i w 4 i ξ 2 i 2 i (100) = 1 V 1 X i w i ξ i − ¯ ξ 4 + 6 V 1 X i w i 2 i ξ i − ¯ ξ 2 − 12 V 2 1 X i w 2 i ξ 2 i 2 i + + 3 V 1 X i w i 4 i 1 − 4 w i V 1 + 4 w 2 i V 2 1 + 24 V 2 1 ¯ ξ X i w 2 i ξ i 2 i + 6 V 3 1 X i w i 2 i X j w 2 j 2 j + + 6 V 3 1 X i w i ξ 2 i X j w 2 j 2 j − 9 V 4 1 X i w 2 i 2 i ! 2 − 18 V 2 1 ¯ ξ 2 X i w 2 i 2 i (101) = 1 V 1 X i w i ξ i − ¯ ξ 4 + 6 V 1 X i w i 2 i ξ i − ¯ ξ 2 − 12 V 2 1 X i w 2 i 2 i ξ 2 i − 2 ξ i ¯ ξ + ¯ ξ 2 + + 3 V 1 X i w i 4 i 1 − 2 w i V 1 2 + 6 V 3 1 X i w 2 i 2 i X j w j 2 j + + 6 V 3 1 X i w 2 i 2 i X j w j ξ 2 j − V 1 ¯ ξ 2 − 9 V 4 1 X i w 2 i 2 i ! 2 (102) = 1 V 1 X i w i ξ i − ¯ ξ 4 + 6 V 1 X i w i 2 i ξ i − ¯ ξ 2 1 − 2 w i V 1 + 3 V 1 X i w i 4 i 1 − 2 w i V 1 2 + + 6 V 3 1 X i w 2 i 2 i X j w j ξ j − ¯ ξ 2 + X j w j 2 j 1 − 3 w j 2 V 1 (103) Skewness and kurtosis unbiased by Gaussian uncertainties page 31 of 36 h m 2 2 i = Y i Z ∞ −∞ m 2 2 ( x 0 ) 1 √ 2 π i exp − ( x 0 i − ξ i ) 2 2 2 i d x 0 i (104) = 1 V 2 1 X i w 2 i ξ 4 i + 6 ξ 2 i 2 i + 3 4 i + X i w i ξ 2 i + 2 i X j 6 = i w j ξ 2 j + 2 j + − 2 V 3 1 X i w 3 i ξ 4 i + 6 ξ 2 i 2 i + 3 4 i + X i w i ξ 2 i + 2 i X j 6 = i w 2 j ξ 2 j + 2 j + +2 X i w 2 i ξ 3 i + 3 ξ i 2 i X j 6 = i w j ξ j + X i w i ξ 2 i + 2 i X j 6 = i w j ξ j X k 6 = i,j w k ξ k + + 1 V 4 1 X i w 4 i ξ 4 i + 6 ξ 2 i 2 i + 3 4 i + 4 X i w 3 i ξ 3 i + 3 ξ i 2 i X j 6 = i w j ξ j + + 6 X i w 2 i ξ 2 i + 2 i X j 6 = i w j ξ j X k 6 = i,j w k ξ k + 3 X i w 2 i ξ 2 i + 2 i X j 6 = i w 2 j ξ 2 j + 2 j + + X i w i ξ i X j 6 = i w j ξ j X k 6 = i,j w k ξ k X l 6 = i,j,k w l ξ l (105) = 1 V 2 1 X i w 2 i ξ 4 i + 6 V 2 1 X i w 2 i ξ 2 i 2 i + 3 V 2 1 X i w 2 i 4 i + 1 V 2 1 X i w i ξ 2 i X j 6 = i w j ξ 2 j + 1 V 2 1 X i w i ξ 2 i X j 6 = i w j 2 j + + 1 V 2 1 X i w i 2 i X j 6 = i w j ξ 2 j + 1 V 2 1 X i w i 2 i X j 6 = i w j 2 j − 2 V 3 1 X i w 3 i ξ 4 i − 12 V 3 1 X i w 3 i ξ 2 i 2 i − 6 V 3 1 X i w 3 i 4 i + − 2 V 3 1 X i w i ξ 2 i X j 6 = i w 2 j ξ 2 j − 2 V 3 1 X i w i ξ 2 i X j 6 = i w 2 j 2 j − 2 V 3 1 X i w i 2 i X j 6 = i w 2 j ξ 2 j − 2 V 3 1 X i w i 2 i X j 6 = i w 2 j 2 j + − 4 V 3 1 X i w 2 i ξ 3 i X j 6 = i w j ξ j − 12 V 3 1 X i w 2 i ξ i 2 i X j 6 = i w j ξ j − 2 V 3 1 X i w i ξ 2 i X j 6 = i w j ξ j X k 6 = i,j w k ξ k + − 2 V 3 1 X i w i 2 i X j 6 = i w j ξ j X k 6 = i,j w k ξ k + 1 V 4 1 X i w 4 i ξ 4 i + 6 V 4 1 X i w 4 i ξ 2 i 2 i + 3 V 4 1 X i w 4 i 4 i + + 4 V 4 1 X i w 3 i ξ 3 i X j 6 = i w j ξ j + 12 V 4 1 X i w 3 i ξ i 2 i X j 6 = i w j ξ j + 6 V 4 1 X i w 2 i ξ 2 i X j 6 = i w j ξ j X k 6 = i,j w k ξ k + + 6 V 4 1 X i w 2 i 2 i X j 6 = i w j ξ j X k 6 = i,j w k ξ k + 3 V 4 1 X i w 2 i ξ 2 i X j 6 = i w 2 j ξ 2 j + 3 V 4 1 X i w 2 i ξ 2 i X j 6 = i w 2 j 2 j + + 3 V 4 1 X i w 2 i 2 i X j 6 = i w 2 j ξ 2 j + 3 V 4 1 X i w 2 i 2 i X j 6 = i w 2 j 2 j + 1 V 4 1 X i w i ξ i X j 6 = i w j ξ j X k 6 = i,j w k ξ k X l 6 = i,j,k w l ξ l (106) Skewness and kurtosis unbiased by Gaussian uncertainties page 32 of 36 = " 1 V 1 X i w i ξ i − ¯ ξ 2 # 2 + 6 V 2 1 X i w 2 i ξ 2 i 2 i + 3 V 2 1 X i w 2 i 4 i + 2 V 2 1 X i w i ξ 2 i X j 6 = i w j 2 j + + 1 V 2 1 X i w i 2 i X j 6 = i w j 2 j − 12 V 3 1 X i w 3 i ξ 2 i 2 i − 6 V 3 1 X i w 3 i 4 i − 2 V 3 1 X i w i ξ 2 i X j 6 = i w 2 j 2 j + − 2 V 3 1 X i w i 2 i X j 6 = i w 2 j ξ 2 j − 2 V 3 1 X i w i 2 i X j 6 = i w 2 j 2 j − 12 V 3 1 X i w 2 i ξ i 2 i X j 6 = i w j ξ j + − 2 V 3 1 V 2 1 ¯ ξ 2 X i w i 2 i − X i w i 2 i X j w 2 j ξ 2 j − 2 V 1 ¯ ξ X i w 2 i ξ i 2 i + 2 X i w 3 i ξ 2 i 2 i + + 6 V 4 1 X i w 4 i ξ 2 i 2 i + 3 V 4 1 X i w 4 i 4 i + 12 V 4 1 X i w 3 i ξ i 2 i X j 6 = i w j ξ j + + 6 V 4 1 V 2 1 ¯ ξ 2 X i w 2 i 2 i − X i w 2 i 2 i X j w 2 j ξ 2 j − 2 V 1 ¯ ξ X i w 3 i ξ i 2 i + 2 X i w 4 i ξ 2 i 2 i + + 6 V 4 1 X i w 2 i ξ 2 i X j 6 = i w 2 j 2 j + 3 V 4 1 X i w 2 i 2 i X j 6 = i w 2 j 2 j (107) = " 1 V 1 X i w i ξ i − ¯ ξ 2 # 2 + 4 V 2 1 X i w 2 i ξ 2 i 2 i + 2 V 2 1 X i w 2 i 4 i + 2 V 2 1 X i w i ξ 2 i X j w j 2 j + + 1 V 2 1 X i w i 2 i ! 2 − 4 V 3 1 X i w 3 i 4 i − 2 V 3 1 X i w i ξ 2 i X j w 2 j 2 j − 2 V 3 1 X i w i 2 i X j w 2 j 2 j + − 8 V 2 1 ¯ ξ X i w 2 i ξ i 2 i − 2 V 1 ¯ ξ 2 X i w i 2 i + 6 V 2 1 ¯ ξ 2 X i w 2 i 2 i + 3 V 4 1 X i w 2 i 2 i ! 2 (108) = " 1 V 1 X i w i ξ i − ¯ ξ 2 # 2 + 4 V 2 1 X i w 2 i 2 i ξ 2 i − 2 ξ i ¯ ξ + ¯ ξ 2 + 2 V 2 1 X i w 2 i 4 i + + 2 V 2 1 X i w i ξ 2 i − ¯ ξ 2 X j w j 2 j + 1 V 2 1 X i w i 2 i ! 2 − 4 V 3 1 X i w 3 i 4 i + − 2 V 3 1 X i w i ξ 2 i − ¯ ξ 2 X j w 2 j 2 j − 2 V 3 1 X i w i 2 i X j w 2 j 2 j + 3 V 4 1 X i w 2 i 2 i ! 2 (109) = " 1 V 1 X i w i ξ i − ¯ ξ 2 # 2 + 4 V 2 1 X i w 2 i 2 i ξ i − ¯ ξ 2 + 2 V 2 1 X i w i ξ i − ¯ ξ 2 X j w j 2 j 1 − w j V 1 + + 2 V 2 1 X i w 2 i 4 i 1 − 2 w i V 1 + 1 V 2 1 " X i w i 2 i 1 − w i V 1 # 2 + 2 V 4 1 X i w 2 i 2 i ! 2 (110) h k 4 i = h m 4 i − 3 h m 2 2 i (111) Skewness and kurtosis unbiased by Gaussian uncertainties page 33 of 36 h m 2 ( x ) i − m 2 ( ξ ) = 1 V 1 X i w i 2 i 1 − w i V 1 (112) h m 3 ( x ) i − m 3 ( ξ ) = 3 V 1 X i w i 2 i ξ i − ¯ ξ 1 − 2 w i V 1 (113) h m 4 ( x ) i − m 4 ( ξ ) = 6 V 1 X i w i 2 i ξ i − ¯ ξ 2 1 − 2 w i V 1 + 3 V 1 X i w i 4 i 1 − 2 w i V 1 2 + + 6 V 3 1 X i w 2 i 2 i X j w j ξ j − ¯ ξ 2 + X j w j 2 j 1 − 3 w j 2 V 1 (114) h m 2 2 ( x ) i − m 2 2 ( ξ ) = 4 V 2 1 X i w 2 i 2 i ξ i − ¯ ξ 2 + 2 V 2 1 X i w i ξ i − ¯ ξ 2 X j w j 2 j 1 − w j V 1 + + 2 V 2 1 X i w 2 i 4 i 1 − 2 w i V 1 + 1 V 2 1 " X i w i 2 i 1 − w i V 1 # 2 + 2 V 4 1 X i w 2 i 2 i ! 2 (115) Since the righ t-hand side of Eq. (112) do es not dep end on ξ , f ∗ ( x , ) = f ( ξ , ) = h m 2 ( x ) i − m 2 ( ξ ) and the expression of the noise-un biased sample v ariance m ∗ 2 = m 2 ( x ) − f ∗ ( x , ) is found immediately: m ∗ 2 = m 2 − 1 V 1 X i w i 2 i 1 − w i V 1 = k ∗ 2 . (116) In order to remo v e the dep endence on ξ in Eqs (113)–(115), f ∗ ( x , ) is deriv ed from f ( ξ , ) such that h f ∗ ( x , ) i = f ( ξ , ). In the case of skewness, f ( ξ , ) has the following form: f ( ξ , ) = X i c i ξ i − ¯ ξ , (117) where c i denotes the coefficient of the i -th term. The computation of h P i c i ( x i − ¯ x ) i leads to: h X i c i ( x i − ¯ x ) i = X i c i Z ∞ −∞ x 0 i √ 2 π i exp − ( x 0 i − ξ i ) 2 2 2 i d x 0 i + − 2 V 1 X i c i X j w j Z ∞ −∞ x 0 j √ 2 π j exp " − ( x 0 j − ξ j ) 2 2 2 j # d x 0 j (118) = X i c i ξ i − 1 V 1 X i c i X j w j ξ j (119) = X i c i ξ i − ¯ ξ . (120) Since Eq. (120) equals Eq. (117), it follows f ∗ ( x , ) = X i c i ( x i − ¯ x ) , (121) and the noise-un biased sample skewness m ∗ 3 = m 3 ( x ) − f ∗ ( x , ) is m ∗ 3 = m 3 − 3 V 1 X i w i 2 i ( x i − ¯ x ) 1 − 2 w i V 1 = k ∗ 3 . (122) Skewness and kurtosis unbiased by Gaussian uncertainties page 34 of 36 F or the kurtosis momen t and cumulan t, f ( ξ , ) in volv es ξ -dep endent terms of the form P i c i ξ i − ¯ ξ 2 . The computation of h P i c i ( x i − ¯ x ) 2 i leads to: h X i c i ( x i − ¯ x ) 2 i = X i c i Z ∞ −∞ x 0 i 2 √ 2 π i exp − ( x 0 i − ξ i ) 2 2 2 i d x 0 i + − 2 V 1 X i c i w i Z ∞ −∞ x 0 i 2 √ 2 π i exp − ( x 0 i − ξ i ) 2 2 2 i d x 0 i + − 2 V 1 X i c i X j 6 = i w j Z ∞ −∞ x 0 i x 0 j 2 π i j exp " − ( x 0 i − ξ i ) 2 2 2 i − ( x 0 j − ξ j ) 2 2 2 j # d x 0 i d x 0 j + + 1 V 2 1 X i c i X j w 2 j Z ∞ −∞ x 0 j 2 √ 2 π j exp " − ( x 0 j − ξ j ) 2 2 2 j # d x 0 j + + 1 V 2 1 X i c i X j w j X k 6 = j w k Z ∞ −∞ x 0 j x 0 k 2 π j k exp " − ( x 0 j − ξ j ) 2 2 2 j − ( x 0 k − ξ k ) 2 2 2 k # d x 0 j d x 0 k (123) = X i c i ξ 2 i + 2 i − 2 V 1 X i c i w i ξ 2 i + 2 i − 2 V 1 X i c i ξ i X j 6 = i w j ξ j + + 1 V 2 1 X i c i X j w 2 j ξ 2 j + 2 j + 1 V 2 1 X i c i X j w j ξ j X k 6 = j w k ξ k (124) = X i c i ξ 2 i + X i c i 2 i − 2 ¯ ξ X i c i ξ i − 2 V 1 X i c i w i 2 i + + 1 V 2 1 X i c i X j w 2 j 2 j + ¯ ξ 2 X i c i (125) = X i c i ξ i − ¯ ξ 2 + X i c i 2 i 1 − 2 w i V 1 + 1 V 2 1 X i c i X j w 2 j 2 j . (126) Th us, each of the terms of the form P i c i ξ i − ¯ ξ 2 in Eqs (114)–(115) can b e replaced b y the expression X i c i ( x i − ¯ x ) 2 − 2 i 1 − 2 w i V 1 − 1 V 2 1 X j w 2 j 2 j , (127) Skewness and kurtosis unbiased by Gaussian uncertainties page 35 of 36 and the noise-un biased sample kurtosis momen t m ∗ 4 and cumulan t k ∗ 4 are found as follows: m ∗ 4 = m 4 − 6 V 1 X i w i 2 i ( x i − ¯ x ) 2 1 − 2 w i V 1 − 2 i 1 − 2 w i V 1 2 − 1 V 2 1 1 − 2 w i V 1 X j w 2 j 2 j + − 3 V 1 X i w i 4 i 1 − 2 w i V 1 2 − 6 V 3 1 X i w 2 i 2 i X j w j ( x j − ¯ x ) 2 − X j w j 2 j 1 − 2 w j V 1 + − 1 V 1 X j w 2 j 2 j + X j w j 2 j 1 − 3 w j 2 V 1 (128) = m 4 − 6 V 1 X i w i 2 i ( x i − ¯ x ) 2 1 − 2 w i V 1 + 3 V 1 X i w i 4 i 1 − 2 w i V 1 2 + − 6 V 3 1 X i w 2 i 2 i X j w j ( x j − ¯ x ) 2 − X j w j 2 j 1 − w j V 1 − 3 V 4 1 X i w 2 i 2 i ! 2 (129) = m 4 − 6 V 1 X i w i 2 i " ( x i − ¯ x ) 2 1 − 2 w i V 1 − 2 i 2 1 − 2 w i V 1 2 + m ∗ 2 w i V 1 # − 3 V 4 1 X i w 2 i 2 i ! 2 (130) ( m 2 2 ) ∗ = m 2 2 − 4 V 2 1 X i w 2 i 2 i ( x i − ¯ x ) 2 − 2 i 1 − 2 w i V 1 − 1 V 2 1 X j w 2 j 2 j + − 2 V 2 1 X i w i ( x i − ¯ x ) 2 − 2 i 1 − 2 w i V 1 − 1 V 2 1 X j w 2 j 2 j X j w j 2 j 1 − w j V 1 + − 2 V 2 1 X i w 2 i 4 i 1 − 2 w i V 1 − 1 V 2 1 " X i w i 2 i 1 − w i V 1 # 2 − 2 V 4 1 X i w 2 i 2 i ! 2 (131) = m 2 2 − 2 V 1 m 2 X i w i 2 i 1 − w i V 1 + 1 V 2 1 " X i w i 2 i 1 − w i V 1 # 2 + − 4 V 2 1 X i w 2 i 2 i ( x i − ¯ x ) 2 − 2 i 2 1 − 2 w i V 1 − 2 V 2 1 X i w i 2 i ! 2 + 4 V 3 1 X i w i 2 i X j w 2 j 2 j + + 2 V 2 1 X i w i 2 i 1 − 2 w i V 1 + 1 V 2 1 X j w 2 j 2 j X j w j 2 j − 1 V 1 X j w 2 j 2 j (132) = ( m ∗ 2 ) 2 − 4 V 2 1 X i w 2 i 2 i ( x i − ¯ x ) 2 − 2 i 2 1 − 2 w i V 1 − 2 V 2 1 X i w i 2 i ! 2 + + 4 V 3 1 X i w i 2 i X j w 2 j 2 j + 2 V 2 1 X i w i 2 i ! 2 − 4 V 3 1 X i w 2 i 2 i X j w j 2 j − 2 V 3 1 X i w i 2 i X j w 2 j 2 j + + 4 V 4 1 X i w 2 i 2 i ! 2 + 2 V 3 1 X i w 2 i 2 i X j w j 2 j − 2 V 4 1 X i w 2 i 2 i ! 2 (133) = ( m ∗ 2 ) 2 − 4 V 2 1 X i w 2 i 2 i ( x i − ¯ x ) 2 − 2 i 2 1 − 2 w i V 1 + 2 V 4 1 X i w 2 i 2 i ! 2 (134) k ∗ 4 = m ∗ 4 − 3 ( m 2 2 ) ∗ . (135) Skewness and kurtosis unbiased by Gaussian uncertainties page 36 of 36
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment