Sequential detection of Markov targets with trajectory estimation
The problem of detection and possible estimation of a signal generated by a dynamic system when a variable number of noisy measurements can be taken is here considered. Assuming a Markov evolution of the system (in particular, the pair signal-observa…
Authors: Emanuele Grossi, Marco Lops
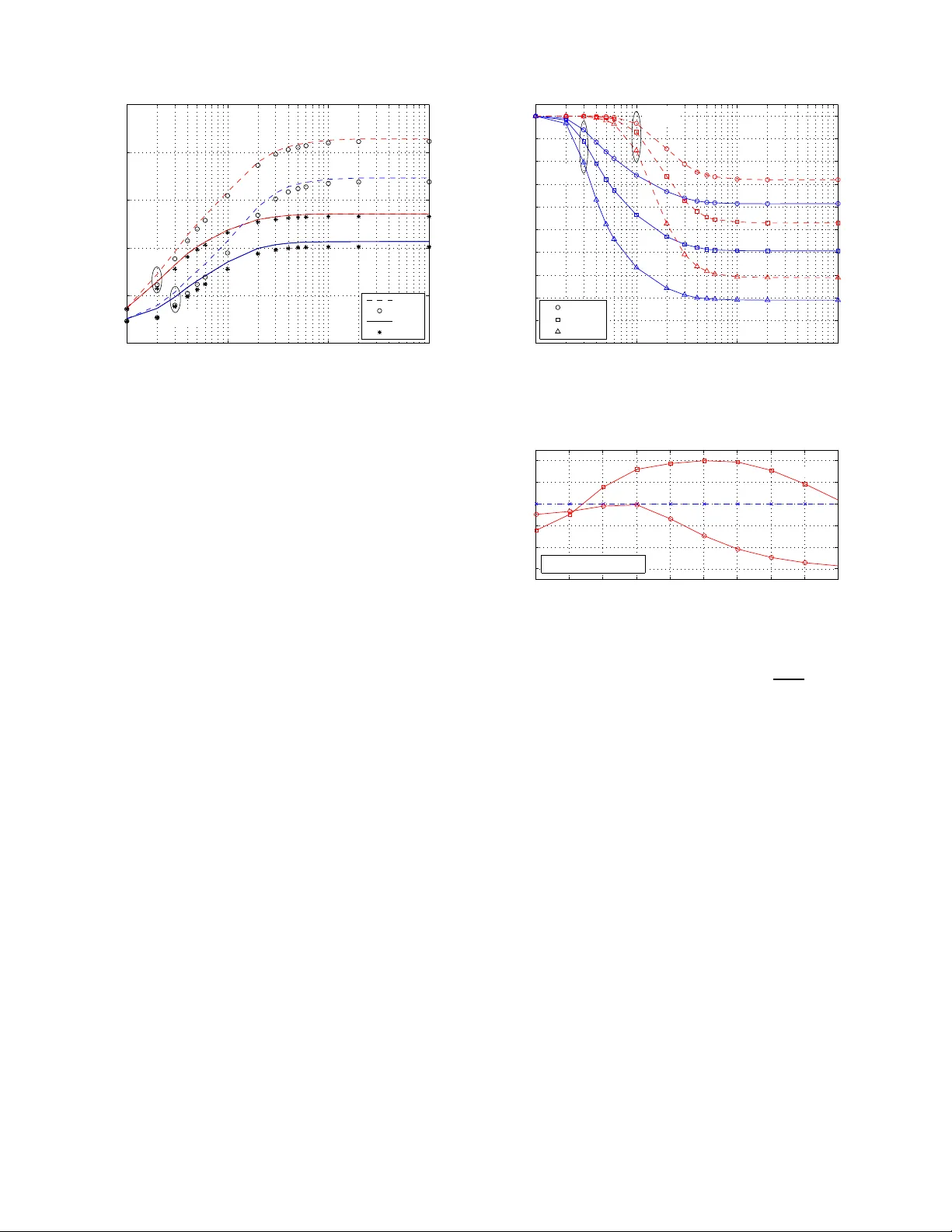
TRANSACTION ON INFORMA TION THEOR Y , V OL. X, NO. X, MONT H YEAR 1 Sequential detecti on of Mark o v tar gets with trajec tory estimati on Emanuele Grossi, Member , IEEE , and Marco Lops , Senior Member , IEEE Abstract —The problem of detection and possible estimation of a signal generated by a dynamic system when a v ariable number of noisy measurements can be taken is here considered. Assuming a Markov ev olution of the system (in p articular , the pair signal-observation for ms a hid den Marko v model), a sequential procedure is p roposed, wherein the detection p art is a sequential probability ratio test (SPRT) and the estimation part re lies upon a m aximum-a-posteriori (MAP) c riterion, gated by the detection stage (the parameter to be estimated is the trajectory of the state evolution of the system i tself). A thorough analysis of th e asymptotic behaviour of the test i n this new scenario is giv en, and sufficient conditions for its asymptotic optimality are stated, i.e. f or almost sure minimization of the stopping time and for (first-order) mini mization of an y moment of its distribution. An app lication to radar surveillance problems is also examined. Index T erms —Asymptotic op timality , hid den Markov models (HMM), sequential detection and estimation, SPR T . I . I N T RO D U C T I O N M ANY statistical decision prob lems in en gineerin g ap - plications re quire to perfor m state estimation of a dynamic system u nder un certainty as to signal presence [1]– [3]. This includ es fault detection and diagn osis in a dynamical system control [4], [5] , target d etection and tracking [6], image and speech segmentation [7], speaker identification and source separation, blind deco n volution of communication channels. Ap plication o f seq uential decision rules to the ab ove scenario arouses much interest since it promises a considerable gain in sensitivity , m easured by th e reduc tion in th e av erage sample number (ASN), with resp ect to fixed sample size (FSS) proced ures. Th ese adv antages are particularly a ttractiv e in remote r adar sur veillance, where the signal amplitude is weak compare d to th e back groun d n oise and strin gent detectio n specifications can be met only b y processing multiple f rames as in [8]–[10] ). In this case, FS S techniq ues usually result to be inefficient while sequential procedur es are known to in crease the sensiti vity o f p ower -limited systems or, alternatively , to reduce the ASN. The adop tion of sequential procedur es, however , poses some difficulties: since the instant wh en th e pr ocedur e stops sampling is not d etermined in advance (it is a random stopping time, indeed) th e set o f trajectories of th e d ynamic system to b e con sidered (i.e. th e par ameter space) has an infinite cardinality . On the other hand, sequential testing rules have been already extended to the case of com posite h ypothe ses. In The authors are with the D AEIMI, Univ ersit ` a degli Studi di Cassino, via G. Di Biasio 43, Cassino (FR), 03043 Italy . E-mail: { e.grossi, lops } @unic as.it. Manuscript recei ved January 26, 2007; re vised December 4, 2007. [11] an SPR T is adopted in a radar framew ork assuming a prior on the par ameter space, in turn con sisting of a finite n umber of elements (the rad ar resolution cells). Sub-o ptimal s equential classification proced ures (also ca lled multi-hyp otheses tests) were also p ropo sed du ring th e past yea rs, such as [12 ]–[19 ] for the case o f indep endent and identically distributed ( i.i.d.) observations a nd [2 0]–[24 ] fo r the mo re gene ral setting of non i.i.d . observations. Howe ver , all of th ese studies were restricted to a finite card inality of the par ameter space, an overly restrictive con dition, which correspo nds to req uiring that the dy namic system m ay only lie in a determine d state, with n o tran sition allowed. Fe w works in the past have studied sequential problems fo r hidden Markov mo dels ( HMMs), which are kn own to admit a dyn amical system repr esentation in the sense of con trol theory [2 5]. In [2 6] the perfo rmances of SPR T s for mo del estimatio n in parame trized H MMs an d the cumu lativ e sum (CUSUM) p rocedur e for c hange poin t detection in HMMs are studied, while [2 7] addresses the quickest detection of transient signals represen ted as HMMs using a CUSUM-like p rocedu re, with possible applications to the radar framew ork. This pap er addresses th e prob lem of sequen tial detection and trajec tory estimation of the state ev olution of a dy namical system observed through noisy measurements. In the above framework, its contributions can be summarize d as follows. - At the d esign stage, a sequ ential proced ure is de fined with no restriction as to the parameter space cardinality . The detection part of the proced ure realizes a n SPR T while, in ord er to estima te the system state trajecto ry , a gated estima tor is defined, in th e sense that estimation is enabled b y the result o f the detection operation. - I t is kn own that W ald’ s SPR T for testing simple h y- potheses based on i. i.d. ob servations has a n umber of remarkab le pr operties [28], [29], the mo st appealing be- ing the fact that it simu ltaneously minim izes the exp ected sample size u nder both hy potheses. These prop erties, howe ver , fail to ho ld when the observations are n ot i.i.d., as it happens when they are gener ated by a dy namic system. In th is paper , a deep asymptotic analysis f or th e detection p art is g iv en and sufficient co nditions u nder which th ese p roperties h old ar e stated , c onsistent with previous r esults in [ 20], [ 21], [ 23]. I n p articular, it is shown that under a set of rath er mild co nditions the test ends with p robability o ne a nd its sto pping time is almost surely min imized in the class of tests with the same or smaller e rror p robabilities. Furthermo re, reinforcing o ne of such con ditions, it is also shown that any moment of TRANSACTION ON INFORMA TION THEOR Y , VOL. X, NO. X, M ONTH YE AR 2 the stoppin g time distribution is first-order asymp totically minimized in the same class of tests. - At the a pplication stage, the ge neral pro blem o f mu lti- frame target detectio n and tracking for radar surveillance is considered : in this way , previous limitation s on target mobility imposed by other stud ies are a v oided. - Fin ally , a thorough perf ormance analysis is gi ven, aim ed primarily at showing the corr ectness of the asy mptotic analysis and at investigating the effects of system pa- rameters. The superiority of seq uential dete ction and estimation r ules with respect to FSS techniques is also shown in the afore-m entioned rad ar ap plication. The re st of the pap er is organ ized as f ollows. Next sec- tion presents the elements of the pro blem while section II I addresses the sequen tial detec tion a nd estimation pr oblem. Section IV presen ts the asymptotic results while section V covers the radar surveillance problem. Fin ally , section VI is de voted to the presentatio n of num erical results, while conclud ing remarks are giv en in section VII. For reade r’ s sake, some notatio n, used thro ughou t the rest of the paper, is first introdu ced. Notation: In what f ollows, all random v ariables are defined on a comm on prob ability space (Ω , F , P ) an d are denoted with capital letters. Lower case letters are u sed to denote realizations of rando m variables while calligraph ic let- ters to den ote sets with in wh ich ran dom variables take values. σ -algebr as are deno ted using script letters, σ ( X ) being the smallest σ -algebr a gen erated by the random variable X . X i : j will be used to den ote segments of r andom variables taken from the proc ess { X k } k ∈ Z : specifically , X i : j = { X k } j k = i for i ≤ j , and X −∞ : j = { X k } j k = −∞ . E is the op erator of expectation: a subscrip t will be added in case of am biguity , so that E θ and E H are expectation when θ is the true state of nature and hypo thesis H is true, resp ectiv ely . D( ·k· ) denotes the Kullback-Leib ler d iv ergence operato r . Th e acr onyms a.s. and a.e. stands fo r alm ost sure and almo st everywhere. N denotes the set of natur al nu mbers, i.e. { 1 , 2 , . . . } , Z th e set of integers, R the set of real num bers and R + the set o f positive real numbers. Finally , th e notation h v ∼ g v means that lim v → 0 h v /g v = 1 . I I . P RO B L E M F O R M U L AT I O N Consider a d ynamic system with a M arkov ev olution. X i , i ∈ N , is th e state vector at time i an d S is the state space, with car dinality M . I n particula r , { X i } i ∈ N forms a d iscrete- time, hom ogeneo us Markov chain with g i ven in itial distri- bution π an d tran sition probabilities a ( x i , x j ) = P { X k = x i }|{ X k − 1 = x j } , x i , x j ∈ S . A sequen ce of states { X i } k i =1 , o ften called trajecto ry , is denoted with X 1: k and has density p k ( x 1: k ) = π ( x 1 ) Q k i =2 a ( x i − 1 , x i ) , with respect to the cou nting mea sure. { X i } i ∈ N is o bserved throug h a set of noisy measure ments. The measurement process is { Z i } i ∈ N , and th e sample space of each Z i is ( Z , V ) , V being a σ - algebra of subsets o f Z . Consider a σ -finite m easure ν on ( Z , V ) . I f the signal { X i } i ∈ N is p resent, { ( X i , Z i ) } i ∈ N is a HMM: giv en a re alization { x i } i ∈ N of { X i } i ∈ N , { Z i } i ∈ N is a sequence of con ditionally indepen dent random variables, each Z i having d ensity f ( z | x i ) with respect to ν . On th e o ther hand, if the me asurements contain only no ise, { Z i } i ∈ N is a n i.i.d. process, each Z i having density f ( z | θ 0 ) with respect to ν . Thu s, f or ev ery k ∈ N , the jo int distribution o f Z 1: k has condition al density f k ( z 1: k | x 1: k ) = k Y i =1 f ( z i | x i ) , if the signal is pr esent and X 1: k = x 1: k , f k ( z 1: k | θ 0 ) = k Y i =1 f ( z i | θ 0 ) , if the signal is no t present , with respect to ν k . Giv en th ese elements, one is to sample the proce ss { Z i } i ∈ N sequentially and decide, as soon as p ossible, if measuremen ts are g enerated by noise alon e or if they co me from a dy namic system. In the latter case, it can be also re quired to estimate the system trajectory which has generated such measure ments. The parameter spac e, th en, is { θ 0 } ∪ × i ∈ N S . As in [1]–[ 3], whose focus, h owe ver , w as on non- sequential decision rules, there is a mutu al cou pling of detection and estimation and two different strategies may be adopted. Indeed, the structure of the decision ru le can be cho sen so as to improve the detection o r the estimation perform ance. The former case is called a weakly coupled (or u ncoupled ) d esign while th e latter a strongly coupled ( or co upled) d esign. In both cases, th e estimator is enabled by the detec tion op eration: this gating , howe ver , can be (po ssibly) optim al fo r the detection or for the estimation. Howe ver , the proble m of d esigning sequential procedu res fo r detection and estimation is consid erably more difficult than that of devising FSS pro cedures [30] and the ap proach taken in gener al is to extend and g eneralize the SPR T designin g a p ractical, possibly sub-optim al, rule [ 11], [1 2], [14], [15 ], [21]– [23]. In this pape r the uncou pled stra tegy is adopted , this choice being moti vated by a num ber of reaso ns: it ha s a very simple structure; as sho wn in section IV, it exhibits many o ptimal pro perties; detectio n is the prim ary interest in many practical app lications, as fo r examp le, radar surveillance problem s later discussed. I I I . D E T E C T I O N A N D E S T I M AT I O N P RO C E D U R E A sequen tial decision rule is the p air ( ϕ, ξ ) , where ϕ = { ϕ k } k ∈ N is a stopping r ule and ξ = { ξ k } k ∈ N a terminal d eci- sion rule [ 29]. Since detection and estimation are perform ed in para llel, the termin al decision r ule is itself comp osed of a detection rule δ = { δ k } k ∈ N for testing the signal pr esence and of a trajectory estimator b x = { b x k } k ∈ N , i.e. ξ = ( δ, b x ) . The propo sed (non -rando mized) sequential decision rule is, then, ϕ k ( z 1: k ) = ( 1 , if Λ k ( z 1: k ) / ∈ ( γ 0 , γ 1 ) , 0 , other wise , (1a) δ k ( z 1: k ) = ( 1 , if Λ k ( z 1: k ) ≥ γ 1 , 0 , if Λ k ( z 1: k ) ≤ γ 0 , (1b) b x k ( z 1: k ) = arg max x 1: k ∈ S k p k ( x 1: k )Λ k ( z 1: k | x 1: k ) , if Λ k ( z 1: k ) ≥ γ 1 , (1c) TRANSACTION ON INFORMA TION THEOR Y , VOL. X, NO. X, M ONTH YE AR 3 where Λ k ( z 1: k ) = P x 1: k ∈ S k p k ( x 1: k )Λ k ( z 1: k | x 1: k ) , Λ k ( z 1: k | x 1: k ) be ing the likelihood ratio of f k ( z 1: k | x 1: k ) to f k ( z 1: k | θ 0 ) . Notice that the pair ( ϕ, δ ) is an SPR T for testing H 0 = ‘noise only’ against the alternative H 1 = ‘signal present’, no matter of its trajector y . H 1 , then, is the hy pothesis that Z 1: k has de nsity f k,H 1 ( z 1: k ) = P x 1: k ∈ S k p k ( x 1: k ) f k ( z 1: k | x 1: k ) , ∀ k ∈ N . The strength of such a sequential test is the pair of probab ilities of erro rs of th e first and second kind, α and β , respectively (often , in detection problem s, α is r eferred to as prob ability o f false alarm , P fa , an d β as pr obability of miss, P miss ). Denotin g with τ the stop ping time and with ψ = { ψ k } k ∈ N its conditional distrib ution, 1 these probab ilities of er ror are gi ven by α = P k ∈ N E θ 0 ψ k ( Z 1: k ) δ k ( Z 1: k ) and β = P k ∈ N E H 1 ψ k ( Z 1: k ) 1 − δ k ( Z 1: k ) , P d = P k ∈ N E H 1 ψ k ( Z 1: k ) δ k ( Z 1: k ) being the p robability of d e- tection. 2 The bo undarie s of the te st, γ 0 and γ 1 , with 0 < γ 0 < 1 < γ 1 < + ∞ , are cho sen in or der to have the req uired strength ( α, β ) . As concerns b x only , it can be considered a gated estimator since estimation is enabled by th e detection rule. Fu rthermo re, consider the triplet ( τ , X 1: τ , Z 1: τ ) . Since P { τ = k , X 1: τ = x 1: k , Z 1: τ ∈ A k }|{ τ < + ∞ , δ τ ( Z 1: τ ) = 1 , H 1 } = = P { τ = k , X 1: τ = x 1: k , Z 1: τ ∈ A k , δ τ ( Z 1: τ ) = 1 }| H 1 P { τ < + ∞ , δ τ ( Z 1: τ ) = 1 }| H 1 = = P − 1 d Z A k p ( x 1: k ) f k ( z 1: k | x 1: k ) ψ k ( z 1: k ) δ k ( z 1: k ) dν k ( z 1: k ) , ∀ k ∈ N , x 1: k ∈ S k and A k ∈ σ ( Z 1: k ) , P − 1 d p ( x 1: k ) f ( z 1: k | x 1: k ) ψ k ( z 1: k ) δ k ( z 1: k ) is the den sity of ( τ , X 1: τ , Z 1: τ ) |{ accept H 1 , H 1 true } . T his means that P − 1 d P k ∈ N p ( x 1: k ) f ( z 1: k | x 1: k ) ψ k ( z 1: k ) δ k ( z 1: k ) is the den sity of ( X 1: τ , Z 1: τ ) |{ accept H 1 , H 1 true } so that arg max θ ∈ × i ∈ N S X k ∈ N p ( x 1: k ) f ( Z 1: k | x 1: k ) ψ k ( Z 1: k ) δ k ( Z 1: k ) is a MAP estimator cond itioned upon the e vent { accept H 1 , H 1 true } , x 1: k being the pr ojection of θ o n S k . Since the above estimation ru le is exactly that in (1c), it results that b x is a MAP estimation rule condition ed th at no error of the first kin d is m ade by the detector . Finally , as to th e co mputation al complexity , the sequential decision rule in (1) requ ires to ev aluate the statistics P x 1: k ∈ S k p k ( x 1: k )Λ k ( Z 1: k | x 1: k ) and max x 1: k ∈ S k p k ( x 1: k )Λ k ( Z 1: k | x 1: k ) for k = 1 , . . . , τ , where p k ( x 1: k )Λ k ( Z 1: k ) = π ( x 1 ) f ( Z 1 | x 1 ) f ( Z 1 | θ 0 ) Q k i =2 a ( x i − 1 , x i ) f ( Z i | x i ) f ( Z i | θ 0 ) . These statistics, then, have th e form of a stage-separated function on the algebra ic system ( R , + , · ) and ( R , max , · ) , respectively , an d can be com puted through two dynamic progr amming algorithm s [31] (similar to the forward- backward p rocedu re and to the V iter bi a lgorithm as in [32]), whereb y the compu tational complexity is only linear 1 ψ k ( z 1: k ) is the probabili ty that τ = k gi ven a realiza tion z 1: k of Z 1: k , for any k ∈ N ; the relationship between ψ and ϕ is: ψ 1 ( z 1 ) = ϕ 1 ( z 1 ) and ψ k ( z 1: k ) = ϕ ( z 1: k ) Q k − 1 ℓ =1 ` 1 − ϕ ( z 1: ℓ ) ´ , for k > 1 . 2 Notice that β + P d = P ` { τ < + ∞}| H 1 ´ . in k . Notice that maxim ization in (1c) is preferred to arg max x 1: k ∈ S k p k ( x 1: k ) f k ( z 1: k | x 1: k ) since, in th e for mer case, th e estimator can work on the same d ata as th e d etector, thus further lo wering the c omplexity . I V . A S Y M P T O T I C A N A LY S I S Let T ( α ′ , β ′ ) , α ′ , β ′ ∈ (0 , 1) , be the class of non- random ized tests (denoted with ( N , d ) , N being the stop ping time and d the terminal decision rule), either s equen tial or FSS, with prob ability of error o f th e first and second k ind boun ded by α ′ and β ′ , respectively . I t is known that W ald’ s SPR T for testing a simple hypo thesis against a simp le alternati ve based on i.i.d. observations ha s the following rem arkable properties [28], [29], [33], [ 34]. i) I f the test has strength ( α, β ) and bou ndaries γ 0 , γ 1 , then α ≤ (1 − β ) / γ 1 ≤ 1 /γ 1 and β ≤ (1 − α ) γ 0 ≤ γ 0 . (2) ii) Th e test en ds a.s. under bo th hypotheses. iii) Th e ASN is finite unde r bo th hypotheses. iv) The ASN is min imized amon g tests in the class T ( α ′ , β ′ ) under both hypotheses. Except prop erty (i) , which is easily shown to h old under very general cond itions [35], the o ther prope rties in g eneral do n ot hold in the p resent setting since th e observations { Z i } i ∈ N are n ot indepen dent. This section is devoted to studying the asymptotic beh aviour of the sequential test when th e two error pro babilities simultaneou sly ap proach zero. It will be demonstra ted that, under rather mild hypotheses, the procedur e satisfies also properties (ii) and ( iii) and, asymptotically , (iv). In particu lar , it will be sho wn that every finite moment o f the stopping time is first-order asymptotically minimized in the class T ( α ′ , β ′ ) . The regularity con ditions are stated below . Condition 4.1: The Markov chain { X k } k ∈ N is stationary , irreducib le and aperiodic. Condition 4.2: The family of mixtures o f at m ost M ele- ments o f { f ( ·| x ) } x ∈ S is n ot eq ual to f ( ·| θ 0 ) ν -a.e., i.e., f or ev ery distribution c on S , P x ∈ S c ( x ) f ( ·| x ) a nd f ( ·| θ 0 ) are equal ν -a.e.. Condition 4.3: For every x ∈ S , E H i h ln f ( Z 1 | x ) f ( Z 1 | θ 0 ) i < + ∞ , i = 0 , 1 . Condition 4.4: Ther e exists a constant a > 0 such that E H 0 h f ( Z 1 | x ) f ( Z 1 | θ 0 ) ± a i and E y h f ( Z 1 | x ) f ( Z 1 | θ 0 ) ± a i are finite, for all x, y ∈ S . Condition 4.5: f ( z | x ) f ( z | θ 0 ) ± 1 6 = 0 for every x ∈ S and z ∈ Z . Condition 4.6: The matrix con taining the tran sition proba- bilities { a ( x, y ) } x,y ∈ S is in vertible. Remark 4.7: Since the Markov chain { X i } i ∈ N is homog e- neous an d h as a finite state space, conditio n 4.1 correspo nds to requ iring that { X i } i ∈ N be stationar y and ergod ic, w hich will b e seen to imp ly { Z i } i ∈ N to be stationary and ergodic as well, an essential property for the limiting theorem to be p resented. As co ncerns con dition 4.2, it can be shown (recursively) that it en sures the two densities f k ( ·| θ 0 ) a nd f k,H 1 ( · ) a re n ot ν -a. e. eq ual for every k ∈ N : other wise, for TRANSACTION ON INFORMA TION THEOR Y , VOL. X, NO. X, M ONTH YE AR 4 some k ∈ N it could not be possible to discrimin ate between statistical pop ulations drawn from these two distributions, i.e. detection could no t be possible. Finally , 4. 3 – 4.6 are essentially ‘regularity’ condition s which allow to derive the limiting behaviour of the log-likelihoo d ratios { ln Λ k } k ∈ N . Notice, further more, that th e mo ment conditio ns 4.4 imply 4.3 since there always exists a finite co nstant C such that | ln w | ≤ 2 C cosh( a ln w ) = C ( w a + w − a ) , for any w > 0 . It turns o ut that th e validity of p roper ties (ii) – (iv ) is highly influenced by the lim its λ i = lim k → + ∞ k − 1 E H i ln Λ k ( Z 1: k ) , i = 0 , 1 , in the case that th ey exist finite and non-zer o [20]. For this rea son, it is first given the following (pro of is given in the Appendix). Theor em 4.8: If conditions 4.1 – 4.3 are fulfilled, there exist finite constants λ 0 < 0 and λ 1 > 0 such that lim k → + ∞ 1 k E H i ln Λ k ( Z 1: k ) = λ i , lim k → + ∞ 1 k ln Λ k ( Z 1: k ) = λ i , a.s. und er H i , i = 0 , 1 . These conclusion s h old fo r any initial pro bability with strictly positive en tries (i.e. not nec essarily the stationary one) used in the definition of { Λ k } k ∈ N and λ i have the same v alue. If the log- likelihood ratios { ln Λ k ( Z 1: k ) } k ∈ N satisfy this so rt of ‘stability’ prop erty , it can be easily dem onstrated the following Pr o position 4.9: Unde r co nditions 4.1 – 4 .3, the test ends a.s. unde r both hypo theses, i.e. P { τ < + ∞}| H i = 1 , i = 1 , 0 . Pr o of: Define the tw o aux iliary stop ping times τ 0 = inf k ∈ N : Λ k ( Z 1: k ) ≤ γ 0 and τ 1 = inf k ∈ N : Λ k ( Z 1: k ) ≥ γ 1 . From theorem 4. 8, lim k → + ∞ k − 1 ln Λ k ( Z 1: k ) = λ i , a.s. un der H i , i = 0 , 1 , with λ 0 < 0 and λ 1 > 0 . This imp lies that P n lim k → + ∞ Λ k ( Z 1: k ) < γ 0 o | H 0 = 1 , P n lim k → + ∞ Λ k ( Z 1: k ) > γ 1 o | H 1 = 1 , which m eans that P { τ i < + ∞}| H i = 1 , i = 0 , 1 . T he thesis, then, follows form the fact that τ = min { τ 0 , τ 1 } . The ‘stability’ of { ln Λ k ( Z 1: k ) } k ∈ N of theorem 4.8 is sufficient also to imply the asymptotic op timality o f the test in the sense of the following Theor em 4.10: Supp ose that co nditions 4 .1 – 4.3 ar e ful- filled, γ 0 and γ 1 are chosen so that the test belong to T ( α ′ , β ′ ) and ln γ 1 ∼ ln 1 α ′ , ln γ 0 ∼ ln β ′ as α ′ + β ′ → 0 . Then τ | ln β ′ | − − − − − − → α ′ + β ′ → 0 1 | λ 0 | , a.s. under H 0 , τ | ln α ′ | − − − − − − → α ′ + β ′ → 0 1 λ 1 , a.s. under H 1 . Furthermo re, for every ε ∈ (0 , 1) , it results inf ( N ,d ) ∈ T ( α ′ ,β ′ ) P N > ετ | H i − − − − − − → α ′ + β ′ → 0 1 , i = 0 , 1 . (3) Pr o of: Und er condition s 4. 1 – 4 .3, the conclusion s of theorem 4.8 hold and th en th eorem 1 of [20] ca n b e used. Notice that equation (2) allows to choose the ap propria te thresholds: indeed, it implies that γ 1 = 1 /α ′ and γ 0 = β ′ re- sult in a test wh ich belong s to T ( α ′ , β ′ ) . Moreover, regarding (2) as appr oximate eq ualities ( i.e. by neglecting overshoots) leads to the approximation s (see [33 ]) γ 1 ≈ (1 − β ) /α α + β → 0 ∼ 1 /α, γ 0 ≈ β / (1 − α ) α + β → 0 ∼ β . (4) Notice that (3) does not imply asymptotic optimality of the test (the optimality criter ion of the W ald- W olfwitz theorem [3 4] is about th e minimization of th e ASN under both hypo theses). W ith the a .s. co n vergence of { k − 1 ln Λ k ( Z 1: k ) } k ∈ N alone, the following can be proved. Theor em 4.11: If conditio ns 4. 1 – 4. 3 are satisfied th en lim inf α ′ + β ′ → 0 E H 0 [ τ r ] | ln β ′ | r ≥ 1 | λ 0 | r and lim inf α ′ + β ′ → 0 E H 1 [ τ r ] | ln α ′ | r ≥ 1 λ r 1 , for e very p ositiv e co nstant r . Pr o of: As in [21 , theorem 2.2 ], it is sufficient to ap ply the Markov’ s ineq uality . Indeed, it results E H 0 τ | λ 0 | | ln β ′ | r ≥ ε r P τ | λ 0 | | ln β ′ | > ε H 0 − − − − − − → α ′ + β ′ → 0 ε r , for any r > 0 and ε ∈ (0 , 1) , where th e limit fo llows from theor em 4.10. Since ε is a n arbitra ry constant in (0 , 1) , it fo llows that lim inf α ′ + β ′ → 0 E H 0 h τ | λ 0 | | ln β ′ | r i ≥ 1 , w hich proves the first in equality . The other one can be proved similarly . In order to guarantee finiteness of the e xpected sample s ize and to obtain its first-order a symptotic minimization, condition 4.3 must be strengthened requiring 4.4 – 4.6 to h old. Indeed, the following can be proved (proo f is given in the Append ix). Theor em 4.12: Suppose that cond itions 4.1, 4 .2, 4.4 – 4. 6 are fulfilled, γ 0 and γ 1 are chosen so that the test belong s to T ( α ′ , β ′ ) a nd ln γ 1 ∼ ln 1 α ′ , ln γ 0 ∼ ln β ′ as α ′ + β ′ → 0 . Then, for every r ∈ N , E H i [ τ r ] < + ∞ , i = 0 , 1 , and, a s α ′ + β ′ → 0 , inf ( N ,d ) ∈ T ( α ′ ,β ′ ) E H 0 [ N r ] ∼ E H 0 [ τ r ] ∼ | ln β ′ | r | λ 0 | r , inf ( N ,d ) ∈ T ( α ′ ,β ′ ) E H 1 [ N r ] ∼ E H 1 [ τ r ] ∼ | ln α ′ | r λ r 1 . The O (1) term is d ue to the overshoo t ln Λ τ ( Z 1: τ ) /γ 0 or ln Λ τ ( Z 1: τ ) /γ 1 , an alogous to W ald’ s lower bound [33] fo r the sample size (which is attained when these overshoots are ignored ). From theorem s 4.1 0 a nd 4.1 2, it results tha t the asy mptotic behaviour of the test is d etermined by the constants λ i , i = 0 , 1 . T hese co nstants are often difficult to ev aluate an d, thus, appro ximations or bound s can be usefu l. T o this end , the fo llowing prop ositions, whose pr oofs are given in the Append ix, are presented. Pr o position 4.13: Constan ts λ i , i = 0 , 1 , satisfy the follow- ing λ 1 ≤ X x ∈ S π ( x ) D f ( ·| x ) k f ( ·| θ 0 ) , (5a) | λ 0 | ≤ X x ∈ S π ( x ) D f ( ·| θ 0 ) k f ( ·| x ) , (5b) TRANSACTION ON INFORMA TION THEOR Y , VOL. X, NO. X, M ONTH YE AR 5 where π is the unique stationary distribution of th e Mar kov chain { X i } i ∈ N . Pr o position 4.14: If for ev ery distrib ution c on S D P x ∈ S c ( x ) f ( ·| x ) k f ( ·| θ 0 ) = D P x ∈ S c ′ ( x ) f ( ·| x ) f ( ·| θ 0 ) , (6a) D f ( ·| θ 0 ) k P x ∈ S c ( x ) f ( ·| x ) = D f ( ·| θ 0 ) k P x ∈ S c ′ ( x ) f ( ·| x ) , (6b) for any p ermutation c ′ of c , then D 1 M P y ∈ S f ( ·| y ) k f ( ·| θ 0 ) ≤ λ 1 ≤ D f ( ·| x ) k f ( ·| θ 0 ) , (7a) D f ( ·| θ 0 ) k 1 M P y ∈ S f 1 ( ·| y ) ≤ | λ 0 | ≤ D f ( ·| θ 0 ) k f ( ·| x ) , (7b) where D f ( ·| x ) k f ( ·| θ 0 ) and D f ( ·| θ 0 ) k f ( ·| x ) assume the same v alue for any x ∈ S . Notice that th e up per bounds in (7b) are attained if π ( x ) = 1 for some x ∈ S and a ( x, x ) = 1 , ∀ x ∈ S , while th e lower bound s if π ( x ) = 1 / M , ∀ x ∈ S , and a ( x, y ) = 1 / M , ∀ x, y ∈ S . V . E X A M P L E O F A P P L I C A T I O N : T H E R A DA R C A S E The radar proble m is character ized by the inheren t pr esence of multiple-re solution e lements, which co rrespond to ran ge ‘bins’ as well as Doppler, azim uth and e lev ation cells. Th is problem has bee n solved in [11], [16] , [2 4] but a ll o f these approa ches c oncern the case that the target is not allowed to change its po sition while being illu minated by th e rad ar . This con dition ma y be to o restrictive, especially in airborne applications where the relative radial velo city between target and radar may e xceed Mach-2. The surveillance area i s di vided into s maller angular regions, each visited in turn by the antenna beam in cyclic manner . In each r egion a seq uential pr ocedure is u sed to accept or reject the hyp othesis that a single target is present. The measureme nt process is obtain ed d ividing th e region into a grid and discretizing th e continuous-time received signal accordin gly (if the g rid is suffi ciently fine, losses d ue to possible mismatches may be neglected) . The measurement at epoch i ∈ N , also called fram e, is the set of retur ns receiv ed from a ll of the radar r esolution elemen ts, i.e. Z ℓ = Z ℓ ( x ) : x ∈ { 1 , . . . , N a } × { 1 , . . . , N e } × { 1 , . . . , N r } × { 1 , . . . , N d } , where N a , N e , N r , N d are the number of resolution elements in azimuth , elev ation, rang e and Doppler, respectively . The target signature app ears on a t most one resolution element in each f rame. The target state space consists of the set of all the resolution cells, i.e. S = { 1 , . . . , N a } × { 1 , . . . , N e } × { 1 , . . . , N r } × { 1 , . . . , N d } , with M = N a N e N r N d . If also velocities are to be considered , then the state sp ace can be enlarged con sequently . A first-order Gaussian-Ma rkov random walk model is used to derive the transition probabilities, which are given by a ( x i , x i +1 ) = Q 4 ℓ =1 a ℓ ( x i,ℓ , x i +1 ,ℓ ) , where x i,ℓ denotes the ℓ - th comp onent of th e target state vector at ep och i and a ℓ ( x i,ℓ , x i +1 ,ℓ ) = Q x i +1 ,ℓ − x i,ℓ − 1 / 2 σ ℓ + − Q x i +1 ,ℓ − x i,ℓ + 1 / 2 σ ℓ , ℓ = 1 , . . . , 4 . In the ab ove equ ation, Q ( x ) = 1 √ 2 π R + ∞ x e − t 2 dt an d σ ℓ is a p arameter related to the target mob ility alon g the ℓ -th dimension: large values o f σ ℓ allow large target maneuvers but decrease, at the same time , target detectio n and estimation ca- pabilities. 3 As c oncerns th e initial pro bability , if no other prior informa tion is available (for example previous detection s), it is reasonable to f orce π ( x ) = 1 / M , f or all x ∈ S . It is suppo sed that the components of the measuremen t Z i are indepe ndent, ea ch Z i ( x ) , x ∈ S , be ing an expon entially distributed rand om v ariable with d ensity h 1 ( v ) = e − v 1+ ρ 1 + ρ u( v ) , if the target is present in location x, (8a) h 0 ( v ) = e − v u( v ) , otherwise , (8b) where ρ den otes the sign al-to-no ise ratio ( SNR) and u( y ) is the u nit-step function . In this case f ( z i | x i ) = h 1 z i ( x i ) Q x ∈ S x 6 = x i h 0 z i ( x ) , f ( z i | θ 0 ) = Q x ∈ S h 0 z i ( x ) and Λ k ( z 1: k ) = k Y i =1 h 1 z i ( x i ) h 0 z i ( x i ) = k Y i =1 e z i ( x i ) ρ/ (1+ ρ ) 1 + ρ , ∀ k ∈ N . 4 (9) Notice th at, as it c an b e easily ch ecked, this mod el satisfies condition s 4 .2 – 4.6, and, also, e quations (6). In particu lar , for conditio n 4 .4 to hold, it is sufficient to choo se a < 1 /ρ . This m eans that the test first-ord er asymp totically min imizes any positive moment of th e stopp ing time d istribution. Even in the above situation , howe ver , occasionally long ob servations can b e needed . Further more, if ther e are mismatches between design an d actu al values of some p arameters (for example, the SNR) th e resulting ASN can be very large, especially for small error prob abilities. Truncation of the pro cedure then can be u sed to prevent such a pr oblem: wh en a fixed samp le K is reached, hypothesis H 1 or H 0 is ac cepted whether Λ K ( Z 1: k ) exceeds γ K or no t, respectiv ely . The impact of truncatio n on the system perfor mances as well as the p roblem of the final threshold setting is not explored fur ther her e and the reader is referred to the past literatur e [37]–[39] . V I . N U M E R I C A L R E S U LT S The beh aviour of the sequential pro cedure has been tested throug h M onte C arlo simulations in terms o f ASN and P track , 3 Notice that, ev en if all transitions are theoretica lly admissible, real targets necessari ly need to satisfy physical constraints, such as limitat ions on the maximum veloci ty and accelerat ion. In this case, a truncat ed Gaussian density can be used. 4 The model of equati ons 8 – 9 applies, for exa mples, if measurements come from a squa re law e n vel ope detec tor , th e noi se is addi ti ve, whit e a nd Gaussian, the targ et has a Swerli ng-I fluctuat ion model and frequency agility is used to achi e ve frame-to-frame target amplitud e decorrel ation. T his is a common situa tion in rad ar scenarios [36]. TRANSACTION ON INFORMA TION THEOR Y , VOL. X, NO. X, M ONTH YE AR 6 10 −1 10 0 10 1 10 2 0 50 100 150 200 250 σ ρ =0 dB, α ’=10 −3 , β ’=10 −3 M=20 approx M=10 approx ASN H0 ASN H1 Fig. 1. ASN under bot h hypotheses versus th e mobility parameter σ for ρ = 0 dB and dif ferent v alues of M . The markers denote the valu es resulting from the asymptoti c approxima tions of the ASN of theorem 4.12. the pro bability of co rrect track estimation . First, a gene ral problem of detectio n an d trajectory estimation is considered in order to reinfo rce the discussion in sections III and IV. For simplicity , the measur ement mod el is that of equations (8) – (9), even if th ere is n o explicit referen ce to a r adar scenario. T he state sp ace is S = { 1 , . . . , M } and the transition probab ilities are deri ved from a truncated Gaussian distribution with stand ard d eviation σ usin g a qu antization step of 10 − 4 . The bo undaries γ 0 and γ 1 have been set using e quation (4), where the design error pro babilities α ′ = β ′ = 10 − 3 have been adopted . In figu re 1 th e ASN under both H 0 and H 1 is plotted versus σ for ρ = 0 dB an d f or various M . Since the mo del satisfies conditions 4.1 – 4. 6, the approx imations for the ASN of theorem 4.12 hold: th e d ifference between the approx imations and the tru e ASN is due to the excesses of ln Λ τ ( Z 1: τ ) over bound aries. Furthe rmore, equations (6) are fulfilled so that the bounds on λ 0 and λ 1 of proposition 4.14 hold and the extrema of th e ASN are (asymp totically) re ached for a ( x, x ) = 1 ∀ x ∈ S and a ( x, y ) = 1 / M ∀ x, y ∈ S ( σ = 10 − 1 and σ = 10 4 giv en the adopted quan tization step). It is confirm ed then the intuitive idea that mo re comp act priors allows easier detections. Figure 2 shows the effect of the SNR on the probab ility of corr ect track estimation. It has bee n also plotted P track ± 1 , the prob ability that the distance be tween ea ch state of the recovered trajectory and the actual state is less then or equ al to 1. No tice that, since an un coupled design has been adopted , the estimation p erform ances decrease as ρ is lowered and/or σ is increased while α an d β are not influenced by these parameters (indeed lower values of ρ and/or larger values of σ a re traded for lar ger ASNs). The remain ing curves con cern more specifically the radar scenario outlined in section V. The s earch zone is composed of a single elevati on and 4 azim uth sectors; the oth er parameters are N r = 100 and N d = 16 . Th e transition pro babilities along the thir d dimension (i.e. r ange) are d efined a s above, with a maxim um admissible r ange transition of ± 3 b ins. Azimuth transitions are neglected while Dopp ler on es ar e assumed equally likely (i. e. σ 2 = 0 and σ 4 = + ∞ ). The 10 −1 10 0 10 1 10 2 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 σ M=10, α ’=10 −3 , β ’=10 −3 ρ =10dB ρ =8dB ρ =6dB P track ± 1 P track Fig. 2. Probabiliti es of correct track estimation P track and P track ± 1 versus the mobili ty paramete r σ for diffe rent value s of ρ and for M = 11 . 2 4 6 8 10 12 14 16 18 20 1 2 3 4 5 6 ρ [dB] σ 3 =0.8, ρ ’=12 dB ASN H1 FSS 10 ⋅ CV H1 ASN H0 =3.6, CV H0 =0.26 Fig. 3. ASN a nd coef ficient of v aria tion versus the SNR under H 1 . The dotted line repre sent the sample size of the equi v alen t FSS rule. truncation stage is K = 20 , with γ K = √ γ 0 γ 1 , while the nominal SNR h as been set at ρ ′ = N d 5 (notice that, since it is n ot r ealistic to assume prio r k nowledge of the target strength, the actual SNR is in gen eral different from the design value ρ ′ ). Th e subsequ ent p lots are aimed both at assessing the effect of a mismatch b etween ρ and ρ ′ and at giving a compar ison with an equivalent FSS pro cedure exhibitin g the same P fa . In figure 3, the ASN and the co efficient of variation ( CV) of the sample size 6 are rep resented versus ρ under H 1 . Notice the char acteristic peak at intermed iate v alues of the SNR: y et th e effect of the beam antenn a rema ining blocked m onitoring a par ticular direction h as been av oided by trunc ation. As for the FSS rule, a conservativ e choice has been made taking 4 samples, which is unifor mly larger than the ASN of the trunca ted sequential procedur e. Fig ure 4 shows P d and P track versus the SNR fo r both th e sequential and the FSS p rocedu re. It can b e seen that the sequential proced ure achieve larger P d over all the inspected range of SNRs main taining, a t the same time, a fu ll sample size sa ving. Notice also the massiv e gain granted in terms of P track which is mainly due to the low ASN required. Finally , figure 5 shows the performan ces in terms of the target mobility . P d , P track , 5 If each frame results from processing pulse tra ins of N d pulses, ρ ′ = N d correspond s to an SNR per pulse of 0 dB. 6 The coef ficient of v ari ation of a random vari able is the ratio σ /µ of its standard de viat ion σ and its mean µ 6 = 0 . TRANSACTION ON INFORMA TION THEOR Y , VOL. X, NO. X, M ONTH YE AR 7 2 4 6 8 10 12 14 16 18 20 0.000111 0.000759 0.00411 0.0173 0.0564 0.145 0.299 0.5 0.702 0.855 0.9436 0.9828 0.99589 0.999242 0.999892 ρ [dB] σ 3 =0.8, ρ ’=12 dB seq FSS P track P d P fa =1.1 ⋅ 10 −3 Fig. 4. Probabilit y of detect ion and correct trajectory estimation versus the SNR for both the s equent ial and the FSS procedures. V ertical axis in Gaussian scale. P track ± 1 and th e ASN are rep resented versus σ 3 for ρ = ρ ′ (recall that σ = 10 − 1 correspo nds to the case o f a steady target). I t can b e seen, that, while th e pr obability of detection of the FSS pr ocedur e impairs as th e target mob ility incr eases, that of the seq uential rule re mains almost u nchang ed, in that large values of σ 3 are coun terbalanced by hig her ASNs. As to the estimation perfor mance, it obviously decreases in both cases, but sequential tech niques retain their superiority over all the range of σ 3 . V I I . C O N C L U S I O N S The general problem of sequen tial detection and possible trajectory estimatio n of a dynamic sy stem obser ved thro ugh a set of n oisy measurem ents has b een considered . Pr evious limitation on the system dynamics imposed by other works present in the literatu re ha ve b een r emoved and a th oroug h analysis of th e asymptotic beh aviour of th e test h as b een presented. In par ticular, it h as been shown that, under rather mild conditio ns, the test is asymptotically optim al, in the sense that it minimizes, up to a O (1) term, any mo ment of the stopping time distribution un der both hypo thesis as th e probab ilities o f er ror ap proach zero . Possible applicatio ns to radar surveillance pro blems have been inspected. Finally , the numerical has c onfirmed the cor rectness o f the given appro x- imations and has d emonstrated the merits of the pro posed strategy with respect to oth er compe titors in the con text of radar surveillance. A P P E N D I X In the following, the pro ofs o f th eorems 4.8, 4.12 and propo sitions 4. 13, 4.14 are given. Pr o of of theorem 4 .8: Part of the pro of bor rows its arguments from [40] . Since condition 4 .1 is satisfied, { X i } i ∈ N is statio nary an d ergod ic and, from [ 40, lem ma 1], { Z i } i ∈ N is stationary and er godic as well. Given the o ne-sided stationar y process ( X i , Z i ) i ∈ N , it is extended to a two-sided statio nary process ( X i , Z i ) i ∈ Z in the usual way . 10 −1 10 0 10 1 10 2 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 ρ ’= ρ =12 dB. σ 3 seq FSS 2 2.5 3 3.5 4 4.5 ASN H1 FSS ASN H0 P track P d P fa =10 −3 P track ± 1 Fig. 5. Proba biliti es of detection and traject ory estimati on versus the range targ et mobil ity par ameter for both sequent ial and FSS procedures (top); ASN in the lo wer plot. Define q k ( z 1: k | x ) = f ( z 1 | x ) f ( z 1 | θ 0 ) X x 2 ∈ S · · · X x k ∈ S a ( x, x 2 ) f ( z 2 | x 2 ) f ( z 2 | θ 0 ) · · k Y i =3 a ( x i − 1 , x i ) f ( z i | x i ) f ( z i | θ 0 ) , q k ( z 1: k ) = max x ∈ S q k ( z 1: k | x ) , with q 1 ( z 1 | x ) = f ( z 1 | x ) f ( z 1 | θ 0 ) . Since q k ( z 1: k | x ) is the likelihood ratio Λ k ( z 1: k ) given th at X 1 = x , it results th at, ∀ z 1: k ∈ Z k and k ∈ N , Λ k ( z 1: k ) ≤ q k ( z 1: k ) and Λ k ( z 1: k ) = X x ∈ S π ( x ) q k ( z 1: k | x ) ≥ max x ∈ S π ( x ) q k ( z 1: k | x ) ≥ ≥ max x ∈ S n min y ∈ S π ( y ) q k ( z 1: k | x ) o = min x ∈ S π ( x ) q k ( z 1: k ) . Combining the above in equalities on Λ k ( z 1: k ) it results th at 1 k ln min x 1 ∈ S π ( x 1 ) ≤ 1 k ln Λ k ( z 1: k ) q k ( z 1: k ) ≤ 0 , ∀ z 1: k ∈ Z k and k ∈ N , which implies that lim k → + ∞ 1 k ln Λ k ( Z 1: k ) = lim k → + ∞ 1 k ln q k ( Z 1: k ) , a.s. under H i , lim k → + ∞ 1 k E H i ln Λ k ( Z 1: k ) = lim k → + ∞ 1 k E H i ln q k ( Z 1: k ) , for i = 0 , 1 . As a con sequence, it is sufficient to demonstrate the conclusion s of the theorem for q k ( Z 1: k ) . The advantage of working with q k rather than Λ k is two-f old. First, q k does not depend upon the initial p robability π and, th en, the second part of the theo rem is demonstra ted. Th e second advantage descends from the follo wing rela tionship q s + t ( z 1: s + t ) ≤ q s ( z 1: s ) q t ( z s +1: s + t ) , ∀ s, t ≥ 1 , (A.1) TRANSACTION ON INFORMA TION THEOR Y , VOL. X, NO. X, M ONTH YE AR 8 for any sequence { z i } i ∈ N (the pr oof is identical to that of [40, lemma 3]). Define n ow a d oubly indexed sequence o f r andom variables { W st } t>s ≥ 0 by W st = ln q t − s ( Z s +1: t ) . W ith this definition, the stochastic proc ess { W st } t>s ≥ 0 satisfies the following thr ee properties. 1) From eq uation (A.1), W st ≤ W su + W ut , ∀ s < u < t , i.e. it is a sub additive p rocess. 2) By the stationarity of { Z k } k ∈ Z , { W st } t>s ≥ 0 is station- ary relati ve to the shift transformation W st → W s +1 t +1 , i.e. W st and W s +1 t +1 have th e same distribution. 3) By cond ition 4.3 , for i = 0 , 1 , it re sults E H i [ W + 01 ] = E H i " max x ∈ S ln f ( Z 1 | x ) f ( Z 1 | θ 0 ) + # ≤ ≤ X x ∈ S E H i ln f ( Z 1 | x ) f ( Z 1 | θ 0 ) < + ∞ . where v + = max { 0 , v } , v ∈ R . By the Kingman ’ s suba dditive ergodic theor em [41 , theorem s 1.5 and 1.8 ], a stoc hastic pro cess satisfying these pr operties also satisfies the co nclusions of the e rgodic th eorem, i.e. i) lim k → + ∞ k − 1 W 0 k = W < + ∞ exists almo st su rely; ii) E[ W ] = lim k → + ∞ k − 1 E[ W 0 k ] ; iii) W is degenerate if th e process is ergo dic. Thus, an ap plication to W 0 k = ln q k ( Z 1: k ) g iv es (ergodicity carries over f rom { Z k } k ∈ N ) lim k → + ∞ 1 k E H i ln q k ( Z 1: k ) = λ i < + ∞ , i = 0 , 1 , exists and lim k → + ∞ 1 k ln q k ( Z 1: k ) = λ i , a.s. under H i , i = 0 , 1 . Since k − 1 ln Λ k ( Z 1: k ) an d k − 1 ln q k ( Z 1: k ) have the same limiting b ehaviour , the proof of the theo rem is c omplete if one d emonstrates tha t λ 0 is finite, strictly negativ e and th at λ 1 is strictly positi ve. In order to prove tha t λ 0 is bound ed also from below , first notice that Λ k ( z 1: k ) is a conve x comb ination of the terms f k ( z 1: k | x 1: k ) /f k ( z 1: k | θ 0 ) , for a ny z 1: k ∈ Z k and k ∈ N , and, thus, ln Λ k ( z 1: k ) ≥ ln min x 1: k ∈ S k f k ( z 1: k | x 1: k ) f k z 1: k | θ 0 ) = = k X n =1 min x ∈ S ln f ( z n | x ) f ( z n | θ 0 ) = k X n =1 η ( z n ) , where { η ( Z k ) } k ∈ N forms a sequence of i.i.d. rando m v ariables under H 0 . Furthermo re, by condition 4.3, it results that E H 0 | η ( Z 1 ) | = E H 0 " min x ∈ S ln f ( Z 1 | x ) f ( Z 1 | θ 0 ) # < + ∞ . This implies that λ 0 = lim k → + ∞ 1 k E H 0 ln Λ k ( Z 1: k ) ≥ E H 0 η ( Z 1 ) > −∞ . As for the sign of λ i , i = 0 , 1 , let g n ( z n | z 1: n − 1 ) denote the conditional density gi ven by the ratio f n,H 1 ( z 1: n ) /f n − 1 ,H 1 ( z 1: n − 1 ) f or n ≥ 2 an d by f 1 ,H 1 ( z 1 ) f or n = 1 . Wit h this nota tion, the limiting constan ts λ i are also giv en by λ i = lim k → + ∞ 1 k E H i ln Λ k ( Z 1: k ) = = lim k → + ∞ 1 k k X n =1 E H i " ln g n ( Z n | Z 1: n − 1 ) f ( Z n | θ 0 ) # = = lim k → + ∞ 1 k k X n =1 E H i " ln g n ( Z 1 | Z − n +2:0 ) f ( Z 1 | θ 0 ) # , i = 0 , 1 , (A.2) where stationa rity of { Z i } i ∈ Z has b een exploited. On the other hand, g n ( Z 1 | Z − n +2:0 ) can be written as P x ∈ S f ( Z 1 | x ) P { X 1 = x }| Z − n +2:0 , ∀ n ∈ N , and this implies that min x ∈ S f ( Z 1 | x ) f ( Z 1 | θ 0 ) ≤ g n ( Z 1 | Z − n +2:0 ) f ( Z 1 | θ 0 ) ≤ max x ∈ S f ( Z 1 | x ) f ( Z 1 | θ 0 ) , n ∈ N , and, by cond ition 4 .3, that n ln g n ( Z 1 | Z − n +2:0 ) f ( Z 1 | θ 0 ) o n ∈ N is a se- quence of unifo rmly integrable random variables. In th is case, dominated con vergence gives lim n → + ∞ E H i ln g n ( Z 1 | Z − n +2:0 ) f ( Z 1 | θ 0 ) = E H i ln g ( Z 1 | Z −∞ :0 ) f ( Z 1 | θ 0 ) , (A.3) i = 0 , 1 . In the above equation , g ( Z 1 | Z −∞ :0 ) deno tes the limit lim n → + ∞ g n ( Z 1 | Z − n +2:0 ) = = lim n → + ∞ X x ∈ S f ( Z 1 | x ) P { X 1 = x }| Z − n +2:0 = = X x ∈ S f ( Z 1 | x ) P { X 1 = x }| Z −∞ :0 , (A.4) where the latter equ ality follows for m a martingale conver - gence theorem b y L ´ evy (see [42] ). Finally , fro m (A.3) and from the Ces ´ aro mean theorem follow that λ i in equation (A.2) can be a lso written as λ i = E H i ln g ( Z 1 | Z −∞ :0 ) f ( Z 1 | θ 0 ) , i = 0 , 1 . which implies that λ 1 = E H 1 D g ( ·| Z −∞ :0 ) k f ( ·| θ 0 ) > 0 , (A.5a) λ 0 = − E H 0 D f ( ·| θ 0 ) k g ( ·| Z −∞ :0 ) < 0 . (A.5b) Inequa lities in (A.5) descend fro m the fact that the Kullback- Leibler divergence is always non negative and is equal to zero if an d only if the two den sities are eq ual ν - a.e.: this, howe ver , cannot hap pen since, fro m equation ( A.4), g · |{ Z −∞ :0 = z −∞ :0 } is alw ays a m ixture of M elemen ts o f { f ( ·| x ) } x ∈ S , which is not ν -a.e. equal to f ( ·| θ 0 ) by condition 4.2. Pr o of of theor em 4. 12: Exploiting the id ea introd uced in [26], [43 ], the likelihood ratio can be equiv alently re presented as Λ k ( Z 1: k ) = M k π , k ∈ N , wh ere k · k is the L 1 -norm on R M and M k is a M × M matrix on R defined as follows M 1 = T 1 , M k = T k A T M k − 1 , f or k ≥ 2 , TRANSACTION ON INFORMA TION THEOR Y , VOL. X, NO. X, M ONTH YE AR 9 ( · ) T denoting transpose, T k being a diagonal M × M matr ix with entries f ( Z k | x ) /f ( Z k | θ 0 ) } x ∈ S , A = [ a ( x, y )] x,y ∈ S the transition pr obability matrix and π = [ π ( x )] x ∈ S the initial prob ability vector . Under con ditions 4.5 and 4.6, M k is in vertible fo r ev ery z 1: k ∈ Z k , k ∈ N , while, u nder hypoth esis H 1 , { X k , Z k } k ∈ N is a Markov chain on S × Z . This implies that the p rocess ( X k , Z k ) , M k k ∈ N is a mu ltiplicativ e Markovian Process (see [44, de finition 1.1]) and M k k ∈ N a prod uct of Markov ran dom matrices. In ord er to exploit th e large deviations result fo r prod ucts of Markov rand om matrices in [44 ], it is first needed to verify the validity o f cond itions A of [26] and [4 4]. Un der conditio n 4.1, { X k } k ∈ N is u niform ly ergodic and so is the Markov chain ( X k , Z k ) k ∈ N (see [45]), i.e. conditio n A 1 is fulfilled. As concern s A 2 , it is re quested that there exists p > 0 such tha t E e p sup n ln ‚ ‚ ‚ M k ‚ ‚ ‚ , ln ‚ ‚ ‚ M − 1 k ‚ ‚ ‚ o X 1 = x 1 , Z 1 = z 1 < + ∞ , (A.6) ∀ ( x 1 , z 1 ) ∈ S × Z and k = 0 , 1 , where the expectatio n is taken with respect to the joint distribution of { X k , Z k } k ∈ N and the matrix n orm is that indu ced by the vector no rm, i.e. M k = sup k u k =1 M k u . Now it results that e p sup n ln ‚ ‚ ‚ M 2 ‚ ‚ ‚ , ln ‚ ‚ ‚ M − 1 2 ‚ ‚ ‚ o ≤ T 2 A T T 1 p + T 2 A T T 1 − 1 p ≤ ≤ A T T 1 T 2 p + A T − 1 T − 1 1 T − 1 2 p , with T i k p = max x ∈ S f ( Z k | x ) f ( Z k | θ 0 ) i ! p ≤ X x ∈ S f ( Z k | x ) f ( Z k | θ 0 ) ip , i = ± 1 . This im plies that equation ( A.6) is satis fied if E " f ( Z 1 | w ) f ( Z 1 | θ 0 ) f ( Z 2 | x ) f ( Z 2 | θ 0 ) ± p | X 1 = x 1 , Z 1 = z 1 # < + ∞ , ∀ w, x, x 1 ∈ S and z 1 ∈ Z . But E " f ( Z 1 | w ) f ( Z 1 | θ 0 ) f ( Z 2 | x ) f ( Z 2 | θ 0 ) ± p | X 1 = x 1 , Z 1 = z 1 # = = f ( z 1 | w ) f ( z 1 | θ 0 ) ± p X y ∈ S Z Z f ( z | x ) f ( z | θ 0 ) ± p a ( x 1 , y ) f ( z | y ) ν ( dz ) = = f ( z 1 | w ) f ( z 1 | θ 0 ) ± p X y ∈ S a ( x 1 , y ) E y " f ( Z 1 | x ) f ( Z 1 | θ 0 ) ± p # , which is b ounde d for every ( w , z 1 ) ∈ S × Z by cond ition 4.5 an d for every x 1 , x, y ∈ S b y cond ition 4.4. As concern s condition A 3 , the process ( X k , Z k ) , M k k ∈ N has to be strongly irredu cible a nd contracting (see [26 , definition 2] for the terminolo gy) and this can be shown u sing a rguments similar to those in [2 6, proof of p roposition 4]. Since these three c onditions are satisfied, it r esults that: i) th ere exists a neighb ourho od I of the o rigin such that, for every p ∈ I , E h M k π p | X 1 = x 1 , Z 1 = z 1 i 1 /k conv erges to a fun ction H ( p ) unifo rmly in ( x 1 , z 1 ) ∈ S × Z [44 , section 4 and theorem 4.3]; ii) H ′ (0) = λ 1 [44, propo sition 3.8] . These two prop erties will be used to derive the convergence rate of the sequence { k − 1 ln Λ k ( Z 1: k ) } k ∈ N . T o th is end, define the function e H ( p ) = lim sup k → + ∞ 1 k ln E H 1 h e p ln Λ k ( Z 1: k ) i = = lim sup k → + ∞ 1 k ln E H 1 [Λ p k ( Z 1: k )] . Giv en the u niform co n vergence in ( x 1 , z 1 ) and rec alling that M k π = Λ k ( Z k ) , property (i) implies that lim k → + ∞ 1 k ln E H 1 [Λ p k ( Z 1: k )] = ln H ( p ) , ∀ p ∈ I , and the n e H ( p ) = ln H ( p ) , ∀ p ∈ I , so that, f rom pro perty (ii), e H ′ (0) = λ 1 . Denote now with D e H the set { p ∈ R : e H ( p ) < + ∞} . Since, from co ndition 4.4, E H 1 [Λ a k ( Z 1: k )] ≤ E H 1 " k Y n =1 max x ∈ S f ( Z n | x ) f ( Z n | θ 0 ) a # ≤ ≤ X y ∈ S X x ∈ S E y f ( Z 1 | x ) f ( Z 1 | θ 0 ) a k < + ∞ , it fo llows that e H ( a ) < + ∞ and , thus, the interior part of D e H contains the po int p = 0 . This and the fact that e H ′ (0) = λ 1 implies that 1 k ln Λ k ( Z 1: k ) k ∈ N conv erges to λ 1 exponentially in k [46 , ex ercise 2 .3.25] , [47, theorem IV .1]. 7 The exponential conv ergence is obviously much strong er than the a.s. conver gence gr anted by theorem 4 .8. In deed, the former implies that + ∞ X k =1 k r P n k − 1 ln Λ k ( Z 1: k ) − λ 1 ≥ ε o | H 1 < + ∞ , ∀ ε > 0 and r > 0 , which in tu rn implies that k − 1 ln Λ k ( Z 1: k ) k ∈ N conv erges r -qu ickly to λ 1 for any r > 0 [48, lemma 3 ]. 8 The latter is also called strong complete conv ergence in [2 1], [22]. Given th e r -qu ick con vergence for any r > 0 , since λ 1 is finite and strictly positive from theorem 4.8, the thesis f ollows from [20 , cor ollary 1]. The case under H 0 can be h andled similarly conside ring Z k , M k k ∈ N , where { Z k } k ∈ N is now an i.i.d. process. In order to pr ove propo sitions 4.13 and 4.14 the following lemma is first ne eded. lemma A.1: D P x ∈ S c ( x ) f ( ·| x ) k f ( ·| θ 0 ) and D f ( ·| θ 0 ) k P x ∈ S c ( x ) f ( ·| x ) are conv ex function on the set { c ( x ) } x ∈ S ∈ [0 , 1] M : P x ∈ S c ( x ) = 1 . Pr o of: It ca n be verified exploiting Jensen inequ ality and conv exity of f unctions − ln v and v ln v , v ∈ R + . Pr o of of pr o position 4.1 3: From the proo f of theorem 4.8, eq uations (A. 4) and (A.5), λ 1 can b e also written as 7 A sequence { Y k } k ∈ N of random varia bles is said to con ve rge expone n- tiall y to a constant λ if, for any suf ficient ly sm all ǫ > 0 , there exists a constant C such tha t P ` | Y k − λ | ≥ ǫ ´ ≤ e − kC [47]. 8 A sequence { Y k } k ∈ N of random va riables is said to con ve rge r -quickly to a constant λ , for s ome r > 0 , if E[ T r ǫ ] < + ∞ , for al l ǫ > 0 , where T ǫ = sup { k ∈ N : | Y k − λ | ≥ ǫ } ( sup {∅} = 0 ) [49]. TRANSACTION ON INFORMA TION THEOR Y , VOL. X, NO. X, M ONTH YE AR 10 E H 1 h D P x ∈ S f ( ·| x ) P { X 1 = x }| Z −∞ :0 k f ( ·| θ 0 ) i . On the other hand , lem ma A.1 and Jensen ineq uality allow to write D P x ∈ S f ( ·| x ) P { X 1 = x }|{ Z −∞ :0 = z −∞ :0 } k f ( ·| θ 0 ) ≤ ≤ X x ∈ S P { X 1 = x }|{ Z −∞ :0 = z −∞ :0 } D f ( ·| x ) k f ( ·| θ 0 ) , for e very r ealization z −∞ :0 of Z −∞ :0 , whereby λ 1 ≤ E H 1 " X x ∈ S P { X 1 = x }| Z −∞ :0 D f ( ·| x ) k f ( ·| θ 0 ) # = = X x ∈ S E H 1 h P { X 1 = x }| Z −∞ :0 i D f ( ·| x ) k f ( ·| θ 0 ) = = X x ∈ S π ( x ) D f ( ·| x ) k f ( ·| θ 0 ) . The upper bound on | λ 0 | can be proved similarly . Pr o of of pr o position 4.14: From (6), settin g c ( x ) = 1 for some x ∈ S , it follows that D f ( ·| x ) k f ( ·| θ 0 ) has the same value for every x ∈ S : this, along with propo sition 4.13, demonstra tes the upp er b ound on λ 1 . As to the lower bou nd, exploiting lemma A. 1 and Jensen ineq uality , it follo ws that D P x ∈ S c ( x ) f ( ·| x ) k f ( ·| θ 0 ) = = 1 M ! M ! X i =1 D P x ∈ S c ′ i ( x ) f ( ·| x ) k f ( ·| θ 0 ) ≥ ≥ D P x ∈ S f ( ·| x ) 1 M ! P M ! i =1 c ′ i ( x ) k f ( ·| θ 0 ) = = D X x ∈ S 1 M f ( ·| x ) k f ( ·| θ 0 ) ! , (A.7) for ev ery pr obability vector c on S , where { c ′ i } M ! i =2 , is the set of all of the p ossible permu tations of c and c ′ 1 = c . Fro m the demon stration of theorem 4.8, equations (A.4) and (A.5), λ 1 can be written also as E H 1 h D P x ∈ S f ( ·| x ) P { X 1 = x }| Z −∞ :0 k f ( ·| θ 0 ) i , and thus, exploiting ( A.7), it re sults that λ 1 ≥ E H 1 h D P x ∈ S 1 M f ( ·| x ) k f ( ·| θ 0 ) i = = D P x ∈ S 1 M f ( ·| x ) k f ( ·| θ 0 ) , and th e lower bou nd is proved. The bounds on | λ 0 | ca n be proved similarly . R E F E R E N C E S [1] D. Middleton and R. Esposito, “Simult aneous optimum dete ction and estimati on of signals in noise, ” IEEE T ra ns. Inform. Theory , vol. 14, no. 3, pp. 434–444, May 1968. [2] A. Fredriksen, D. Middleton, and D . V andelinde, “Simultaneous sig- nal detection and est imation under multiple hypothe ses, ” IEEE T rans. Inform. Theory , vol . 18, no. 5, pp. 607–61 4, Sept. 1972. [3] B. Bayg ¨ un and A. O. Hero, “Optimal simultaneous detection and estimati on under a f alse alarm constr aint, ” IEEE T rans. Inform. Theory , vol. 41, no. 3, pp. 688–703, May 1995. [4] A. S. Wi llsky , “ A surve y of design methods for failure detection in dynamic systems, ” Automatica , vol. 12, no. 6, pp. 601–611, Nov . 1976. [5] M. A. Massoumnia, G. C. V erghese, and A. S. Will sky , “Fail ure detec tion and identific ation, ” IEEE T rans. Automat. Co ntr . , vol. 34, no. 3 , pp. 316–321, Mar . 1989. [6] H. Im and T . Kim, “Optimiz ation of multiframe targ et detect ion schemes, ” IEEE T rans. Aer osp. Electr on. Syst. , vol. 35, no. 1, pp. 176– 187, Jan. 1999. [7] N. Merhav and Y . Ephraim, “ A bayesian classifica tion approac h with applic ation to speech recogniti on, ” IEEE T rans. Signal Proce ssing , vol. 39, no. 10, pp. 2157–2166, Oct. 1991. [8] Y . Barni v , “Dynamic programming solut ion for detect ing dim moving targ ets, ” IEE E T rans. Aer osp. Elec tr on. Syst. , vol. 21, no . 1, pp. 144–156, Jan. 1985. [9] J. Arnold, S. Shaw , and H. Pasternac k, “Efficient target tracki ng using dyamic programming, ” IEEE T rans. Aer osp. Electr on. Syst. , vol. 29, no. 1, pp. 44–56, Jan. 1993. [10] S. M. T onisse n an d R. J. Ev ans, “Performance of dynamic progrmming techni ques for track-befor e-detec t, ” IEEE T rans. A er osp. E lectr on. Syst. , vol. 32, no. 4, pp. 1440–1450, Oct. 1996. [11] M. B. Marcus and P . Swerling, “Sequential detection in radars with multiple resolution elements, ” IRE T rans. Inform. Theory , v ol. 8, no. 4, pp. 237–245, Apr . 1962. [12] P . Armitage, “Sequenti al analysis with m ore than two alte rnati v e hy- potheses and its relation to discriminant functi on analysis, ” J. Royal Statist . Soc. Ser . B , vol. 12, no. 1, pp. 250–263, 1950. [13] J. Kiefer and J. Sacks, “ Asymptotica lly optimum seque ntial inferenc e and design, ” Ann. Math. Statist. , vol. 34, no. 3, pp. 705–750, Sept. 1963. [14] G. Lorden, “Likeliho od ratio tests for s equent ial k-decisio n problems, ” Ann. Math. Stati st. , vol. 43, no. 5, pp. 1412–1427, Oct. 1972. [15] ——, “Ne arly-opti mal sequential test for finitely many parameter val- ues, ” Ann. Statist. , vol. 5, no. 1, pp. 1–21, Jan. 1977. [16] C. W . Helstrom, “ A ra nge-sampled sequential detection system, ” IRE T rans. Inform. Theory , vol. 8, no. 1, pp. 43–47, Jan. 1962. [17] I. S. Ree d and I. S elin, “ A sequentia l test for the presence of a signal in one of k possibl e positi ons, ” IEEE T rans. Inform. Theory , vo l. 9, no. 4, pp. 286–288, Oct. 1963 . [18] C. W . Baum and V . V eerav alli, “ A sequential procedure for multihypoth- esis testing, ” IEE E T rans. Inform. Theory , vol. 40, no. 6, pp. 1994–2007, Nov . 1994. [19] S. Marano, V . Matta, and P . W illet t, “Sequential detec tion of almost- harmonic signals, ” IEEE T rans. Signal Pr ocessing , vol. 51, no. 2, pp. 395–406, Feb . 2003. [20] T . L. Lai, “ Asym ptotic optimali ty of inv ariant sequential probability ratio tests, ” Ann. Statist. , vol. 9, no. 2, pp. 318–333, Mar . 1981. [21] A. G. T arta kov sky , “ Asymptotic optimality of certain multihypothesis sequenti al tests: non-i.i.d. case, ” Statist. Inferen ce for Stochastic Pro- cesses , vol. 1, no. 3, pp. 265–295, Oct. 1998. [22] V . Dragalin, A. G. T artak ovsk y , and V . V eerav alli , “Multihy pothesis sequenti al probabili ty ratio te st – part i: asymptoti c optima lity , ” IEEE T rans. Inform. Theory , vol. 45, no. 7, pp. 2448–2461, Nov . 1999. [23] ——, “Multihyp othesis sequential probabil ity ratio test – part ii : accura te asymptotic expa nsions for the expecte d sample size, ” IEE E T rans. Inform. Theory , vol . 46, no. 4, pp. 1366–1 383, July 2000. [24] A. G. T artak ovsk y , X. R. Li, and G. Y aralo v , “Seque ntial de tecti on of targ ets in multichan nel systems, ” IEEE T rans. Inform. Theory , vol. 49, no. 2, pp. 425–445, Feb . 2003. [25] Y . Ephrai m and N. Me rhav , “Hidden mark ov pro cesses, ” IEEE T rans. Inform. Theory , vol . 48, no. 6, pp. 1518–1 569, June 2002. [26] C. D. F uh, “Sprt a nd c usum in hi dden mark ov models, ” Ann. Statist. , vol. 31, pp. 942–977, Apr . 2003. [27] B. Chen a nd P . W illett, “Detec tion of hidde n mark ov mode l transi ent signals, ” IEEE T ran s. Aer osp. Electr on. Syst. , vol. 36, no. 4, pp. 1253– 1268, Oct. 2000. [28] D. L. Burkholder and R. A. W ijsman , “Opti mum properti es and admis- sibilit y of sequential tests, ” Ann. Math. Statist. , vol. 34, no. 1, pp. 1–17, Mar . 1963. [29] T . S. Ferguson, Mathematical statistics – a decision-the ore tic appr oac h . Academic Press, 1967. [30] D. Black well and M. A. Girshi ck, Theory of games and statistical decisio ns . W ile y , 1954. [31] S. V erd ´ u and H. V . Poor, “ Abstrac t dynamic programming models under commutati vity condit ions, ” SIAM J. Contr . Opt. , vol. 25, no. 4, pp. 990– 1006, July 1987. [32] E . Grossi and M. Lops, “Sequent ial along-trac k integra tion for early detct ion of moving targe ts, ” IEEE T rans. Signal Proce ssing , to be publishe d. [33] A. W ald, “Sequential tests of statisti cal hypotheses, ” Ann. Math. Statist. , vol. 16, no. 2, pp. 117–186, June 1945. [34] A. W ald and J. W olfo witz , “Optimum characte r of the sequenti al probabil ity ratio test, ” Ann. Math. Statist. , vol. 19, no. 3, pp. 326–339, Sept. 1948. TRANSACTION ON INFORMA TION THEOR Y , VOL. X, NO. X, M ONTH YE AR 11 [35] R. H. Berk, “Some asymptotic aspects of s equent ial analysis, ” Ann. Statist . , vol. 1, no. 6, pp. 1126–1138, Nov . 1973. [36] M. I. Skolnik, Intr oduction to radar syste ms , 3rd ed. McGraw Hill, 2001. [37] J. J. Bussgang and M. Marc us, “T runcate d sequential hypothesis test s, ” IEEE T rans. Inform. Theory , vol. 13, no. 3, pp. 512–516, July 1967. [38] S. T anta ratana and H. Poor , “ Asymptotic effic iencie s of truncate d se- quentia l tests, ” IEEE T ra ns. Inform. Theory , vol. 28, no. 6, pp. 911–923, Nov . 1982. [39] S. T antarata na, “Design of nonparame tric trunc ated sequenti al detec tors with parallel linear boundarie s, ” IEEE Tr ans. Aer osp. Electr on. Syst. , vol. 25, no. 4, pp. 483–490, July 1989. [40] B. G. Leroux, “Maximum-li keli hood estimation for hidden m arko v models, ” Stochasti c P r ocesses Appl. , vol. 40, no. 1, pp. 127–143, Feb . 1992. [41] J. F . C. Kingman, “Subaddi ti ve processes, ” in Ecole d’Et ´ e de Pr oba- bilit´ es de Saint-Flour , V -1975 , ser . Lecture Notes in Math, 1976, pp. 167–223. [42] A. N. Shiryae v , Probabi lity , 2nd ed. Springer , 1995. [43] C. D. Fuh, “On bahadur ef ficienc y of the maximum likeliho od estima tor in hidden marko v models, ” Statist. Sinica , vol. 14, no. 1, pp. 127–15 4, Jan. 2004. [44] P . Bougerol, “Th ´ eor ` emes limite pour les syst ` emes lin ´ eaires ` a coef ficient s marko viens, ” Probab . Th. Rel. F iel ds , v ol. 78, no. 2, pp. 193–221, June 1988. [45] O. Capp ´ e, E. Moulines, and T . Ryd ´ en, Infer enc e in hidden Markov models . Springer , 2005. [46] A. Dembo and O. Z eituni , Large de viat ions tech niques and applications , 2nd ed. Springer , 1998. [47] R. S. E llis, “Large de viation s for a lar ge class of random vect ors, ” Ann. Pr obabili ty , vol. 12, no. 1, pp. 1–12, Feb . 1984. [48] T . L. Lai, “On chernoff- sav age stat istics and sequentia l rank tests, ” Ann. Statist . , vol. 3, no. 4, pp. 825–845, July 1975. [49] ——, “Con ver gence rates and r -quick versions of the strong law for station ary mixing sequences, ” Ann. P r obabil ity , vol. 5, no. 5, pp. 693– 706, Oct. 1977. PLA CE PHO TO HERE Emanuele Gro ssi was born in Sora, It aly on Ma y 10, 1978. He rece i ved with honors the Dr . Eng. degre e in T elecommunicati on Engineering in 2002 and the Ph.D. degree in Electric al Engineeri ng in 2006, both from the Univ ersity of Cassino, Italy . From February 2005 he spent six month at the De- partment of Electrical & Computer Enginee ring of the Unive rsity of British Columbia , V ancouv er , as a V isiting Scholar . Since February 2006, he is assistant professor at the Univ ersit y of Cassino. His research intere sts concern wireless multiuser communicatio n systems, radar detect ion and tracki ng, and statistic al decision problems with emphasis on sequen tial analysis. PLA CE PHO TO HERE Marco Lops was born in Naples, Italy on March 16, 1961. He rece iv ed the Dr . Eng. degree in Electro nic Engineeri ng from the Univ ersity of Naples in 1986. From 1986 to 1987 he was in Selenia, Roma, Italy as an engineer in the Air Traf fic Control Systems Group. In 1987 he joined the De partment of E lec- tronic and T elec ommunicatio ns Engineerin g of the Uni versi ty of Naples as a Ph. D. student in Electronic Engineeri ng. He recei v ed the Ph.D. degre e in E lec- tronic Engineering from the Univ ersity of Naples in 1992. From 1991 to 2000 he has been an Associate Professor of Radar Theory and Digital T ransmission Theory at the Univ ersity of Naples, while, since March 2000, he has been a Full Professor at the Univ ersity of Cassino, engaged in research in the field of statistic al signa l processing, with emphasis on Radar Processing and Spread Spectrum Multiuser Communicati ons. He also held teaching positions at the Uni ve rsity of Lec ce and, during 1991 , 1998 and 2000 , he was on sabbatica l leave s at Unive rsity of Connecticu t, Rice Uni versi ty , and Princeton Univ ersity , respecti vely .
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment