Experimental Validation of Fully Distributed Peer-to-Peer Optimal Voltage Control with Minimal Model Requirements
This paper addresses the problem of voltage regulation in a power distribution grid using the reactive power injections of grid-connected power inverters. We first discuss how purely local voltage control schemes cannot regulate the voltages within a…
Authors: Lukas Ortmann, Alex, er Prostejovsky
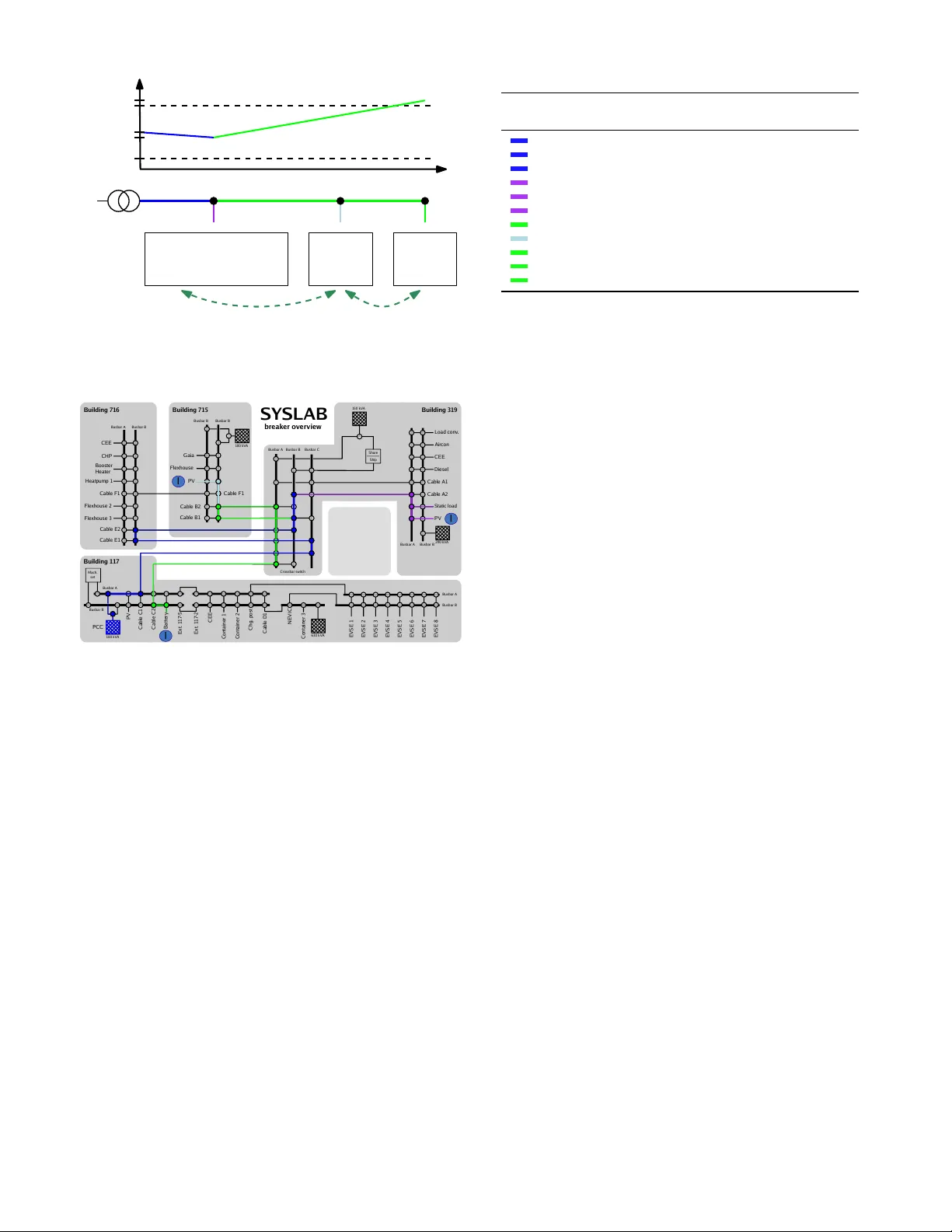
Experimental V alidation of Fully Distrib uted Peer -to-Peer Optimal V oltage Control with Minimal Model Requirements Lukas Ortmann Sav erio Bolognani Automatic Control Laboratory ETH Zurich Zurich, Switzerland Alexander Prostejovsky Kai Heussen Department of Electrical Engineering T echnical Uni versity of Denmark (DTU) Roskilde, Denmark Abstract —This paper addresses the pr oblem of voltage r eg- ulation in a power distribution grid using the reacti ve power injections of grid-connected power in verters. W e first discuss how purely local voltage control schemes cannot regulate the voltages within a desired range under all circumstances and may even yield detrimental control decisions. Communication and, through that, coordination ar e theref ore needed. On the other hand, short- range peer -to-peer communication and knowledge of electric distances between neighbouring controllers are sufficient for this task. W e implement such a peer -to-peer controller and test it on a 400 V distribution feeder with asynchronous communication channels, confirming its viability on real-life systems. Finally , we analyze the scalability of this approach with respect to the number of agents on the feeder that participate in the voltage regulation task. Index T erms —distributed contr ol, distributed optimization, power distribution grids, reactive power , V olt/V Ar control. I . I N T R OD U C T I O N Future power distribution grids are expected to host a significant portion of the total generation capacity , for the most part from renewable energy sources like solar and micro- wind installations. Meanwhile, the deployment of a distributed electric mobility infrastructure will substantially increase the loading of this infrastructure. This transition will inevitably affect the operating regime of distribution feeders, and will increase the risk of both overv oltage and undervoltage con- tingencies. On the other hand, microgenerators and electric vehicle char ging stations will offer unprecedented v oltage This research has been performed using the ERIGrid Research Infrastructure and is part of a project that has receiv ed funding from the European Union’ s Horizon 2020 Research and Inno- vation Program under the Grant Agreement No. 654113. The support of the European Research Infrastructure ERIGrid and its partner T echnical Univ ersity of Denmark is very much appreciated. This paper reflects only the authors’ view and the EU Commission is not responsible for any use that may be made of the information it contains. The research leading to this work was supported in part by the Swiss Federal Office of Energy grant #SI/501708 UNICORN. Corresponding author: Lukas Ortmann, email: ortmannl@ethz.ch. control flexibility via their power inv erters, offering a finely distributed network of reactive power compensators. For the control of these reactiv e power compensators, a multitude of decentralized V olt/V Ar feedback control strategies hav e been proposed (e.g., V olt/V Ar droop control; cf. [1] for a literature revie w) and ultimately incorporated in many grid codes and standards [2]–[4]. These strategies rely on the control architecture schematically represented in Figure 1, where each power inv erter independently regulates its reacti ve power injection based on the voltage measurement performed at its point of connection, typically via a static update map q h ( t + 1) = f h ( v h ( t )) . The update map f h is usually the outcome of heuristic design procedures. In most cases the design is completely model-free (no grid information is used), although computational design approaches hav e also been proposed [5]. Fully decentralized feedback control solutions present mul- tiple advantages, such as: • high rob ustness, giv en by the absence of a single point of failure; • economical deployment and retrofitting (plug-and-play); • minimal actuation time delays, due to the absence of any communication; PCC q h v h controllable inv erter load feedback V olt/V Ar controller voltage magnitude measurement reactive power set-points Fig. 1: Schematic representation of the control architecture employed by fully decentralized V olt/V Ar feedback strategies, e.g. [2]–[4]. Published as "Fully Distributed Peer -to-Peer Optimal V oltage Control with Minimal Model Requirements" on Electric P ower Systems Research, vol. 189, December 2021. https://doi.org/10.1016/j.epsr .2020.106717 • modularity and interoperability , as individual in verters do not coordinate their action; • scalability and computational simplicity . Howe ver , purely decentralized control strategies fail to ensure feasible voltages, ev en if such a feasible solution exists, as recently proven in [1]. Conv ersely , centralized feedback V olt/V Ar solutions are guaranteed to drive the system to a feasible voltage profile, using the same measurements col- lected in the decentralized setting (i.e., only voltage magnitude measurements of the in verters) but processing them in a centralized manner . W e refer to [6], [7] for a recent re view of feedback optimization methods that can be employed to design these centralized feedback V olt/V Ar strategies, and to [8] for an experimental validation that demonstrates a remarkable robustness against model uncertainty . The disadvantages of centralized feedback optimization are that a communication channel between a central computational unit and all the po wer in verters is required, and a global model of the grid needs to be known at this central location. This paper is motiv ated by a fundamental question: is it possible to achiev e optimal V olt/V Ar regulation without collecting all measurement and all model information in a centralized location? A limited number of recent works contributed towards an answer to this question by proposing feedback control strategies that are extremely parsimonious in terms of information that in verters need to communicate: • A distributed solution for the v oltage regulation and loss minimization problem is proposed in [9], allowing asynchronous communication between agents (b ut relying on both angle and magnitude measurements). • In [10], power in verters are controlled by individual automata that communicate a “distress signal” only when their regulation problem becomes infeasible; howe ver , this strategy is not guaranteed to con verge to the optimal regulation. • In a similar spirit, [11] proposes a distrib uted strategy in which in verters communicate only when triggered by local voltage violation rules; an all-to-all communication channel is howe ver assumed. • A primal-dual method that requires only communication between neighboring in verters is proposed in [12]; • The authors of [13] demonstrate how coordination be- tween in verters can be achiev ed by only transmitting a few bits of information; • a distributed dual ascent method is employed in [14], allowing for delayed communication between in verters; • finally , [1] proposes a distributed synchronous dual ascent method with a nested quadratic program. T o the best of the authors’ kno wledge, none of these distributed solutions has been implemented and tested on a real grid with physically distributed computations. In this work, we provide a proof-of-concept demonstration of how V olt/V Ar regulation can be achiev ed via a distributed feedback control law , namely under the specifications that: • each inv erter can only establish asynchronous peer-to- peer communication with its neighboring in verters; • each inv erter only maintains model information regarding its grid neighborhood; • no central coordination unit is present. The reported experiment also validates other important fea- tures of this distributed solution such as its robustness against noisy measurements, its real-time computational feasibility , and the viability of algorithm distribution in a peer-to-peer setting with no master algorithm synchronization. Finally , we inv estigated scalability of the proposed approach via a series of numerical experiments. I I . D I S T R I B U T E D V O LT A G E C O N T R O L In this section we report the procedure proposed in [1] to design a distributed controller for the V olt/V Ar regulation problem. Although a synchronous communication channel was assumed in [1], it provides the key idea on how to achiev e optimal coordination via only short-range exchange of information. A. F eedbac k Optimization Controller The controller is deriv ed from the optimization problem min 1 2 q T M q subject to v min ≤ v h ( q , w ) ≤ v max ∀ h q min ≤ q h ≤ q max ∀ h. (1) where the matrix M is a square, symmetric and positiv e definite design parameter and v and q are the vectors we obtain by stacking the voltages v h and reacti ve power set-points q h of the different inv erters, respectively . The function v h ( q , w ) is the steady-state map of the nonlinear power flow equations that defines voltages v h as a function of both reactiv e powers q and external influences w (e.g., active and reactiv e demands, activ e generation). Activ e power injections are not a d e cision variable in (1) for the follo wing reason. Controlling the active power of devices comes with an economic cost, whereas the usage of reactiv e power is free (neglecting the active power losses generated by the reacti ve power flows). Therefore, it is typically preferred to use the reacti ve power capabilities in the network to their full extent before controlling activ e power injections. T o solve (1) we introduce the dual multipliers λ h, min and λ h, max for the voltage constraints of every inv erter h . Stacking them giv es us the vector λ = λ min λ max with which we form the Lagrangian L ( q , λ ) by dualizing the voltage constraints: L ( q , λ ) = 1 2 q T M q + X h λ h, min ( v min − v h ( q , w )) + X h λ h, max ( v h ( q , w ) − v max ) . (2) W e thus define the equiv alent dual optimization problem max λ ≥ 0 min q L ( q , λ ) subject to q h, min ≤ q h ≤ q h, max ∀ h. (3) The optimization problems (1) and (3) have the same solution (Strong Duality Theorem, [15, Proposition 5.3.2]). W e adopt an iterativ e dual ascent update on λ to compute the solution of (3), obtaining λ min ( t + 1) = [ λ min ( t ) + α ∇ λ min L ( q ( t ) , λ ( t ))] ≥ 0 = [ λ min ( t ) + α ( v min − v ( q ( t ) , w ))] ≥ 0 λ max ( t + 1) = [ λ max ( t ) + α ∇ λ max L ( q ( t ) , λ ( t ))] ≥ 0 = [ λ max ( t ) + α ( v ( q ( t ) , w ) − v max )] ≥ 0 . (4) As we can see e very in verter integrates its own voltage violation with a gain of α . This corresponds to the integral part of a PI-controller and can be done locally , by using feedback from the physical system through voltage magnitude measurements v ( t ) of the inv erters, rather then via a numerical ev aluation of v ( q ( t ) , w ) . T o find the optimal reactiv e power set-points we use the newly calculated λ ( t + 1) and solve q ( t + 1) = arg min q L ( q , λ ( t + 1)) subject to q h, min ≤ q h ≤ q h, max ∀ h. (5) T ow ards this goal, we introduce the approximation ∂ v ( q , w ) ∂ q ≈ X (6) where X is the reduced bus reactance matrix that can be deriv ed from the grid topology and the cable data. The sensi- tivity described by X is similar to power transfer distribution factors for acti ve power generation on the transmission lev el. Under no-load conditions and the assumption of negligible cable resistances this approximation is accurate, because the nonlinearity of the power flo w equations is mild near this operating point [16]. In our application the system can be heavily loaded and the cable resistances are high. It was sho wn in [8] that feedback optimization is sufficiently robust against this model mismatch. This approximation makes v ( q , w ) linearly dependent on q , and we can approximate (5) with a con vex quadratic optimization problem (QP). This QP inv olves the decision variables of all DERs and can be solved by collecting all the necessary information (the multipliers λ ( t + 1) and the parameters X ) in a central control unit [8]. In the follo wing we use the idea proposed in [1] to show ho w (5) can also be solved in a distributed manner, without centralized computation or centralized model knowledge. B. Distributing the Contr oller T o solve the subproblem (5) in a distributed manner we perform K iterative steps, which will hav e to be executed between the times t and t + 1 . T o denote these iterative steps we introduce a new iteration counter τ . W e also introduce the dual multipliers µ h, min and µ h, max for the reactiv e power constraints of e very in verter h , which we stack in the vector µ = [ µ min µ max ] . By dualizing the reactive po wer constraints, we define the Langrangian L λ ( q , µ ) = L ( q , λ ) + X h µ h, min ( q min − q h ) + X h µ h, max ( q h − q max ) (7) and the following optimization problem: max µ ≥ 0 min q L λ ( q , µ ) . (8) The optimization problems (5) and (8) have the same solution (Strong Duality Theorem, [15, Proposition 5.3.2]). Similarly as before, we solve this optimization problem via gradient ascent iterations on µ with step size γ : µ min ( τ + 1) = [ µ min ( τ ) + γ ∇ µ min L λ ( ˆ q ( τ ) , µ ( τ ))] ≥ 0 = [ µ min ( τ ) + γ ( q min − ˆ q ( τ ))] ≥ 0 µ max ( τ + 1) = [ µ max ( τ ) + γ ∇ µ max L λ ( ˆ q ( τ ) , µ ( τ ))] ≥ 0 = [ µ max ( τ ) + γ ( ˆ q ( τ ) − q max )] ≥ 0 (9) where ˆ q ( τ ) = arg min q L λ ( q , µ ( τ )) . Observe, that the update of µ min and µ max can be done locally by e very in verter by integrating the constraint violation of the virtual quantity ˆ q ( τ ) . In order to compute the unconstrained minimizer ˆ q ( τ ) , we take the deriv ativ e ∇ q L λ ( q , µ ) and obtain ∇ q L λ ( q , µ ) = M q + ∂ v ∂ q ( λ max − λ min ) + µ max − µ min . (10) As stated before, we approximate the deriv ative ∂ v /∂ q with X and set (10) to 0. W e then solve for q and obtain ˆ q ( τ ) = − M − 1 X ( λ max − λ min ) + M − 1 [ µ max ( τ ) − µ min ( τ )] . (11) Equation (11) rev eals that all the communication requirements of the proposed iterati ve algorithm are encoded in the sparsity of the matrices M − 1 and M − 1 X . In fact, off-diagonal non- zero elements of these two matrices determine components of λ and µ that need to be communicated between in verters in order to compute ˆ q ( τ ) . In order to maximize the sparsity of both these matrices, we exploit the structure inherited from the physical system. W e inherit the formal definition of neighboring in verters from [9], see Figure 2. Neighbors according to this definition can be con veniently discovered via correlation analysis of the voltage measurements, ev en without central supervision (see [17], [18] and references therein). Due to the sparsity of the power flow equations, G = X − 1 is a sparse matrix: namely , G ij of G is non-zero only if the buses i and j are neighbors, and G ij depends only on the electrical impedance of the path between i and j . Based on this observation, we choose M = X which yields ˆ q ( τ ) = λ min − λ max + G ( µ min ( τ ) − µ max ( τ )) . (12) PCC controllable inv erter load communication Fig. 2: Schematic representation of neighbor-to-neighbor communi- cation, where we adopt the definition of neighbors from [9]: two in verters are neighbors if the electrical path connecting them does not pass through any other bus where a controlled in verter is connected. Therefore in verter i only needs to gather µ j, min and µ j, max from their neighbors j to calculate ˆ q i ( τ ) . Note that M = X is possibly not the only choice that allows to distribute the algorithm, if one accepts to use a descent direction in the gradient steps which is not the steepest one [6, Section III.F]. W ith a proper choice of the gain γ (for which we refer to Section V) the alternate e xecution of (9) and (12) is guaranteed to conv erge to the solution to (8). W e assume that the number of iterations K is chosen sufficiently large so that, after K iterations, ˆ q is accepted as the solution to (5) and determines the next set-point q ( t + 1) . The effect of this approximation is also studied in Section V. The resulting control algorithm consists in a main loop, reported hereafter as Algorithm 1, and a nested iterative procedure, Algorithm 2. Communication between agents only happens as part of Algorithm 2, when the dual multipliers µ of the reactive po wer constraints need to be communicated with neighbors (steps 7–8). All other steps are basic numerical operations that each in verter performs locally . The resulting control architecture is represented in Figure 3. Note that the implementation of our controller inherits the theoretical guarantees provided in [1], including Proposition 6 that guarantees asymptotic optimality (under the linearity condition (6) and assuming that (5) is solved exactly). Algorithm 1 Feedback optimization controller 1: Initialize: λ h, min and λ h, max with 0 2: loop 3: Locally measure the voltage magnitude v h 4: Locally update λ h, min and λ h, max via (4) 5: Jointly compute q h via Algorithm 2 6: Locally apply the new set-point q h 7: W ait until next system interrupt 8: System interrupts generated ev ery T seconds Distribution Grid λ -Update µ -Update q-Update PV1 v 1 λ q 1 λ -Update µ -Update q-Update PV2 v 2 λ q 2 λ -Update µ -Update q-Update Battery v 3 λ q 3 µ µ µ µ Fig. 3: Control architecture. Measurement and actuation is performed locally by each controller . Only the dual multipliers µ min and µ max need to be communicated to neighboring peers. Algorithm 2 Distributed QP solver 1: if Algorithm 2 was nev er executed previously then 2: Initialize: µ h, min , µ h, max and ˆ q h with 0 3: else 4: Keep previous values to warm start 5: counter = 0 Iteration counter 6: repeat 7: Locally update µ h, min and µ h, max via (9) 8: Send µ h, min and µ h, max to neighbors 9: Receiv e µ i, min and µ i, max from all neighbors 10: Locally , compute ˆ q h via (12) 11: counter = counter + 1 12: until counter == K 13: Return the solution q h = ˆ q h I I I . E X P E R I M E N TA L S E T U P The experiment has been implemented in the SYSLAB facility located on the Risø campus of the T echnical University of Denmark. The setup consists of a 400 V three-phase electric grid connecting a v ariety of DERs (solar panels, wind turbines, a flow battery , a diesel generator , controllable loads, among others). Each device has an associated computer node running a distributed monitoring and control platform. A. Algorithm Implementation and Deployment An existing distributed optimization frame work dev eloped at DTU [19] was adopted to implement the proposed dis- tributed optimization controllers over an asynchronous com- munication channel. Each computer node implements Algo- rithm 1 in major fixed time intervals of T = 10 seconds, based on their individual clock. This is therefore the rate at which measurements are collected (line 3) and the system is actuated (line 6). The choice of such a long interval is due to hardware constraints gi ven by the laboratory setup. A more frequent actuation is often possible. Howe ver , the actuation interval should be long enough for the system to settle and reach its steady state. The frequency at which the system can be actuated will always be significantly lower than the rate at which inv erters can communicate (see Section V for a discussion on the implications on the algorithm scalability). Algorithm 2 is e xecuted in K iterations. Lines 7 and 8 of this algorithm require communication between neighbours, where PCC v 1 v 2 v 3 R 1 , L 1 R 2 , L 2 R 3 , L 3 p 1 , q 1 p 2 , q 2 p 3 , q 3 PV1 PV2 Battery ± 8 kV Ar Static load ± 6 kV Ar ± 6 kV Ar 0 kV Ar 10 kW 0 kV Ar 0 kW − 15 kW V oltage [p.u.] 1 0.99 1.06 1.05 0.95 Peer-to-peer communication Fig. 4: Sketch of the voltage profile, the distribution feeder and the peer-to-peer communication. The colors of the voltage profile and the diagram match the colors in the topology in Figure 5. EV SE 1 EV SE 2 EV SE 3 EV SE 4 EV SE 5 EV SE 6 EV SE 7 EV SE 8 Busbar A Busbar B Busbar A Busbar B 630 kV A 1 00 kV A Batt er y Ext. 1 1 7-5 Cable C2 Cable C1 CEE Ext. 1 1 7-2 Chg. pos t Cable D1 PV NEVIC Busbar A Busbar B Busbar C 1 50 kV A 1 00 kV A Gaia Flexhou se PV Cable B 1 Cable B 2 Busbar B Busbar B Busbar A 200 kV A S tatic load Diesel CEE Aircon Cable A 1 Cable A 2 PV Busbar B Busbar A Busbar B Cable F1 Flexhou se 2 Flexhou se 3 Cable E 1 Cable E 2 CEE C HP Heatpump 1 Boos t er Heat er Cable F1 Crossbar switc h Load con v . S Y SL AB br eak er o v er vie w Building 7 1 6 Building 7 1 5 Building 3 1 9 Building 1 1 7 Ship Shore Mac h. se t Containe r 1 Containe r 2 Containe r 3 I I I PCC Fig. 5: SYSLAB infrastructure with the used topology . The colors match the colors in the diagram and in the voltage profile in Figure 4. In verters participating in the control algorithm are marked with an I. the communication time is variable, dependent on uncontrol- lable influences. Coherency of the algorithm, and thereby a synchronous advancement of the algorithm steps, is achiev ed by letting individual nodes remain idle until data has been receiv ed from all neighbours (line 8 of Algorithm 2). This way , the synchronous Algorithm 2 is transparently implemented on an asynchronous communication channel, which has better scaling properties than a synchronous one in such a setup [19]. ZeroMQ [20] is used as the underlying messaging library with TCP transport, facilitating reliable data delivery . The code comprising the distributed framew ork and algorithm is deployed to each of the activ e SYSLAB node computers and operates as a local process. B. T est Case and Experiment Design The topology and operational set-points are designed to produce a voltage drop at the beginning and an overvoltage at the end of the feeder . Without proper reacti ve power control, the feeder’ s ability to host renewable energy infeed is limited and generation would need to be curtailed. The setup consists of the flow battery , two photovoltaic arrays (PV), an adjustable T ABLE I: Parameters of the cables between busbars/de vices. Cable Length Cross section R X [m] [mm 2 ] [ Ω ] [ Ω ] C1 700 240 0.085 0.054 E1 450 240 0.055 0.035 E2 450 240 0.055 0.035 A2 25 95 0.0078 0.002 PV1 83 16 0.095 0.007 Static Load 11 95 0.002 0.001 B1 350 95 0.11 0.027 PV2 8 6 0.025 0.0008 B2 350 95 0.11 0.027 C2 700 240 0.085 0.054 Battery 100 2.5 0.774 0.012 resistiv e load, and a utility grid connection (PCC). This test system is illustrated in Figure 4, and Figure 5 presents the corresponding implementation on the SYSLAB topology vie w . The activ e power injection p 3 of the battery is interpreted as a renewable source, which is not to be curtailed; its activ e power infeed is set to p 3 = 10 kW . The static load is set to an acti ve power consumption of 15 kW ( p 1 = − 15 kW) which is larger than the local production, therefore causing a positiv e acti ve power flo w from the substation. PVs are fluctuating power sources. Therefore, to facilitate repeatability of the experiments and to allow for a comparison between different controllers, the PVs are curtailed to not inject active power ( p 2 = 0 kW). The dif ferent nodes are connected via cables with non-negligible resistance, see T able I. Due to a weak link (resistive) cable connecting the battery to the grid, the battery encounters an overv oltage when the reactiv e power injection is zero. Both PVs and the battery can measure their voltage magnitudes, and their reactive power injections can be controlled. The PV in verters have a reactive power range of ± 6 kV Ar and the battery can be actuated with ± 8 kV Ar . The PVs and the battery can communicate with their neighbors, while the load is uncontrolled and unmeasured. The voltage limits are defined to be 0.95 p.u. and 1.05 p.u. I V . E X P E R I M E N TA L R E S U LT S In this section, we first demonstrate the suboptimal per- formance of a decentralized (purely local) controller on the proposed system, by implementing the droop control recom- mended by the IEEE standard [2]. W e then execute the pro- posed distributed controller, ev aluate its control performance, examine the nested ex ecution of Algorithm 2, hint at a windup phenomenon in case of problem infeasibility , and analyze the trade-off between control performance and communication complexity . A. Local Contr ol The droop controller that we implement is the one proposed in [2] and similar to the ones suggested in the recent grid codes [3], [4]. Every in verter implements the follo wing piecewise linear control law . 0 . 97 1 1 . 03 1 . 05 1 . 07 − 8 − 4 0 4 Battery 0 3 6 9 0 . 97 0 . 98 0 . 99 1 T ime [min] − 1 0 1 2 PV1 0 . 97 0 . 98 0 . 99 1 V oltage [p.u.] 0 1 2 PV2 Reactiv e Power [kV Ar] Fig. 6: Performance of local droop control (IEEE 1547 standard). q h = q max v h < v 1 q max v 2 − v h v 2 − v 1 v 1 ≤ v h ≤ v 2 0 v 2 ≤ v h ≤ v 3 q min v h − v 3 v 4 − v 3 v 3 ≤ v h ≤ v 4 q min v 4 < v h v h q h q h, max q h, min v 1 v 4 v 3 v ref v 2 where v h is the measured voltage magnitude, q h is the calcu- lated reacti ve po wer injection, q min and q max are the minimum and maximum reactiv e power injection. W e tune the droop curve to v 1 = 0 . 95 p.u., v 2 = 0 . 99 p.u., v 3 = 1 . 01 p.u. and v 4 = 1 . 05 p.u.. The resulting performance of the controller is reported in Figure 6. When the control is activ ates at minute 3, only the controller at the battery detects a voltage violation and immediately lo wers its reactive power injection to the mini- mum. Howe ver , this is not sufficient to regulate the voltage to the desired voltage range. The PV systems do not detect an ov ervoltage and therefore do not draw reactive power . W ithout introducing coordination between the inv erters, the persistent ov ervoltage at the battery cannot be prev ented. Therefore, all local control strategies fail in this setup, as established from a theoretical perspectiv e in [1]. Figure 6 also shows that PV1 injects reactive power around minute 4 of the experiment. This worsens the overv oltage at the battery , which shows that local control decisions can in some cases be ev en detrimental. B. Contr oller Evaluation Figure 7 shows the performance of the distrib uted voltage controller with a gain of α = 100 , K = 100 communication steps to distributi vely solve the QP , an ascent step length of γ = 0 . 005 and with matrices M = X and G = X − 1 : X = 0 . 10 0 . 09 0 . 09 0 . 09 0 . 11 0 . 11 0 . 09 0 . 11 0 . 16 , G = 48 . 3 − 40 . 7 0 − 40 . 7 61 . 8 − 18 . 7 0 − 18 . 7 19 . 1 . Cable data hav e been used to compute the matrix G , although the necessary parameters could also be estimated (see [21] for an experimental demostration on the same network). Notice that, as expected, the matrix G has the sparsity pattern induced by the topology of the distribution grid (zero elements in the positions corresponding to non-neighbors). The system is initialized with zero reacti ve power flow . 1 The controller is activ ated after 3 minutes and dri ves all voltages to the desired range. After 11 minutes the acti ve power of the battery , which produces the overv oltage, is brought to 0 kW . The algorithm promptly responds by bringing the reacti ve power injections of all the power in verters to 0 kV Ar . For a more in-depth analysis of the control behavior we provide the data in Figure 8 for a controller with α = 50 and K = 50 . W e report both the electrical quantities v and q and the controllers’ internal variables λ max and µ min ( λ min and µ max remain zero in this experiment). Once the controller is activ ated at 3 minutes, the voltage violation leads to a growing λ 3 , max at the battery . As this integral variable grows, the battery starts drawing reactiv e power . Once the reactive power q 3 of the battery reaches the battery’ s reacti ve po wer limit, the corresponding multiplier µ 3 , min starts gro wing. At each iteration of Algorithm 2, this value is communicated to PV2. Ultimately , PV2 starts drawing reactive power as well (thus participating to the voltage regulation task). Once the reactive po wer limit of PV2 is reached, its µ 2 , min value becomes positiv e and PV1 starts to draw reactiv e po wer . As long as there remains an overv oltage at the battery , the battery keeps integrating its λ 3 , max , which leads to a larger reactive power demand by the in verter that is closer to battery and is not yet saturated. Finally , the voltage con verges to the voltage constraint. Once that point is reached the system has settled (not fully represented in Figure 8). Three remarks are due. • There is no central clock signal and the different in verters time their iterations of Algorithm 1 independently . Mea- surements are therefore not perfectly synchronous. W e do not observe any detrimental effect in the experiment. • Each controller gathers raw voltage measurements. No filtering or state estimation is performed (which, in gen- eral, would require a system model and further exchange of information). The control performance seems to be unaffected by measurement noise and quantization. • W ith a smaller actuation interv al (smaller T) and therefore more frequent control actuations the settling time of the algorithm can be reduced. C. Conver gence of Algorithm 2 In Figure 9, we can see how the internal variables ˆ q of the three inv erters con verge during the ex ecution of Algorithm 2. The algorithm is started as soon as the multipliers λ max are updated with the measured voltage violation. Agents update their internal variable ˆ q h (orange dots in Figure 9) and their 1 Due to an inaccuracy of the sensor used by the internal reactiv e power controller of the battery , we can observe a small tracking error . The reported measurements in the figures are from accurate sensors. 0 . 97 1 1 . 03 1 . 05 1 . 07 − 8 − 4 0 4 Battery 0 3 6 9 12 0 . 97 0 . 98 0 . 99 1 T ime [min] 0 3 6 9 12 − 4 − 2 0 PV1 0 . 97 0 . 98 0 . 99 1 V oltage [p.u.] − 6 − 4 − 2 0 PV2 Reactiv e Power [kV Ar] Fig. 7: Performance of the distributed voltage controller, α = 100 . multipliers µ h, min , µ h, max (not represented) while communicat- ing with their neighbors at each iteration. After K iterations, the internal v alue ˆ q is used to actuate the system by updating the reactiv e power set-points for the in verters (blue line). A few remarks are due: • due to the warm start of the algorithm and the relativ ely small changes in λ max , the initialization of ˆ q is already close to the final (optimal) value; • K = 40 iterations suffice for the con vergence of Algo- rithm 2 in this experiment (see Section V for further dis- cussion on the effect of early termination of Algorithm 2); • the time needed to complete Algorithm 2 is significantly shorter than the sampling rate of Algorithm 1 (10 s). D. Contr oller W indup Figure 10 illustrates the beha vior of the proposed scheme when the V olt/V Ar regulation problem is temporarily unfeasi- ble. A persistent overv oltage at the battery leads to a constantly growing λ 3 , max . All in verters are drawing their maximum reactiv e power , which confirms that the voltage cannot be regulated: there does not exist a feasible reactiv e power input such that all voltages are within the voltage limits. Once we remov e the cause of the ov ervoltage (at approx. 4 minutes) and the v oltage drops, the in verters do not adjust their reactiv e po wer injection, but remain saturated at their limit value for sev eral minutes. This phenomenon corresponds to the windup behavior that is often observed in integral controllers. Here, the integrator is λ 3 , max of the battery . One solution to this windup problem is to stop the integra- tion of the voltage violation once all inv erters hav e saturated. While this is an easy modification for a centralized controller (see [8]), a more sophisticated anti-windup scheme is needed in a distributed setup, where no single agent is aware of the infeasibility of the optimization problem. The design of an effecti ve distributed anti-windup scheme is an interesting and open problem per se . 0 . 97 1 1 . 03 1 . 05 1 . 07 − 8 − 4 0 4 Battery 0 5 10 15 20 0 . 97 0 . 98 0 . 99 1 T ime [min] 0 5 10 15 20 − 4 − 2 0 PV1 0 . 97 0 . 98 0 . 99 1 V oltage [p.u.] − 6 − 4 − 2 0 PV2 Reactiv e Power [kV Ar] 0 5 10 15 0 0 . 2 0 . 4 0 . 6 Battery 0 5 10 15 20 − 1 0 1 T ime [min] 0 5 10 15 20 − 1 0 1 PV1 0 2 4 λ max 0 0 . 02 0 . 04 PV2 µ min Fig. 8: Behavior of the distributed controller with control gain α = 50 . Upper panels: electrical quantities v , q . Lower panel: dual multipliers λ max and µ min (ev aluated at the last step of Algorithm 2). E. Contr ol P erformance vs Communication Complexity The ability of performing optimal voltage control with- out global communication comes at a price. As detailed in Section II-B, in order to obtain an iterative update that only requires neighbor-to-neighbor communication we had to constrain the choice of the quadratic cost parameter M in (1). W e showed that M = X is a valid choice, X being the grid susceptance matrix. As discussed in [9], the minimization of q T X q is connected to the minimization of power losses caused by reactive power flows (under the assumption of homogeneous X/R ratio). Moreov er, as discussed in [1], the cost q T X q can then be rewritten as ( X q ) T GX q , where X q is the first order approximation of the voltage drop caused by reactiv e power injection. Therefore, because G has the structure of a Laplacian, q T X q promotes equal voltage drops in the network. In general, howe ver , a network operator may be interested − 8 . 2 − 8 . 1 − 8 Battery − 3 . 5 − 3 . 4 − 3 . 3 PV2 Reactiv e Power set-points [kV Ar] 4’55” 5’00” 5’05” 5’10” − 0 . 5 0 0 . 5 PV1 T ime [min] Fig. 9: Conv ergence of one ex ecution of Algorithm 2. Reactive power set-points (solid) and updates of the internal variable ˆ q (dotted). 0 . 97 1 1 . 03 1 . 05 1 . 07 − 8 − 4 0 Battery 0 2 4 6 8 10 12 0 . 97 0 . 98 0 . 99 1 T ime [min] 0 2 4 6 8 10 12 − 8 − 6 − 4 − 2 0 PV1 0 . 97 0 . 98 0 . 99 1 V oltage [p.u.] − 6 − 4 − 2 0 PV2 Reactiv e Power [kV Ar] Fig. 10: Controller windup due to a persistent overv oltage. in minimizing a different cost function, e.g. J fair := X i ( q i /q max i ) 2 (13) which promotes proportional fairness in the use of the reactiv e power capacity of each in verter . The difference in the reacti ve power set-points and in the resulting cost is reported in T able II. Given the inexpensi ve nature of reactiv e power , these differences are in most cases acceptable. V . S C A L A B I L I T Y In this section we in vestigate how the performance of the proposed feedback scheme scales with the number of nodes. In order to perform this analysis, we consider a fictitious scenario which is identical to the one described in Section III-B, but where N 0 extra “dummy” nodes hav e been added on the line connecting PV2 to the Battery (see Figure 11). These nodes T ABLE II: Comparison between the steady-state of the distributed algorithm and the maximal-fairness set-points that minimize (13). arg min q T X q arg min J fair difference J fair 2.12 1.98 6.9% PV1 q 1 -2.06 kV Ar -3.76 kV Ar 0.28 [p.u.] PV2 q 2 -6 kV Ar -4.6 kV Ar 0.23 [p.u.] Battery q 3 -8 kV Ar -8 kV Ar 0 [p.u.] PCC PV1 Battery ± 8 kV Ar Static load ± 6 kV Ar 0 kV Ar 10 kW 0 kW − 15 kW Peer-to-peer communication Dumm y 0 kV Ar 0 kW PV2 0 kV Ar ± 6 kV Ar N 0 additional nodes Fig. 11: Diagram of the electrical topology and of the communication graph used in the numerical analysis of the algorithm scalability . are equally spaced and have zero reactiv e power capability . They can communicate one to the next one, so that the entire communication graph becomes a line of N = N 0 + 3 nodes. Their presence therefore af fect the execution of the algorithm without affecting the optimal solution of the problem. W e compare two implementations of our method: in the first case (that we denote as K 1) , we allow an arbitrarily large number K of communication steps between each actuation step (namely , we allo w communication until con ver gence up to a tolerance of 10 V Ar); in the second case, we only allow one communication step for each actuation step ( K = 1 ). This second case closely resembles what was proposed [9]. More generally , we consider it as a prototype for the other distributed methods av ailable in the literature, where communication and actuation are always interleaved one- to-one. These include for example the primal-dual methods proposed in [13] or in [12]. The other methods revie wed in the Introduction also share the same interleaving between communication and actuation. W e will see in this section ho w this appears to be a design choice that limits performance as the network grows in size. In the comparison, it is important to keep in mind that iterations that only require computation and communication can be executed much faster than iterations that require actuation of the system and measurement. W e therefore counted and reported them separately , as commu- nication steps and actuation steps . W e executed the algorithm with K 1 and K = 1 for networks of different sizes, and these are the main findings. Ease of tuning: • If K is large, then the tuning of the inner optimization gain γ becomes very simple; Figure 12 sho ws how a lar ge K giv es a plateau of valid choices for γ . 0.0001 0.0002 0.0005 0.001 0.002 0.005 0.01 0.02 10 2 10 3 10 4 T uning parameter γ of Algorithm 2 Number of actuation steps for conv ergence K=1 K=10 K=100 Fig. 12: Number of actuation steps required for conv ergence as a function of γ and of the number of communication steps K . Network with 3 inverters and α = 100 . Each curve stops, at the right end, at the largest γ that does not cause instability . T ABLE III: Actuation steps required for conv ergence. For K 1 , parameters are constant and are α = 100 , γ = 1 / (2 σ ( G )) . For K = 1 , α has been optimized for ev ery instance. K 1 K = 1 nodes communication steps actuation steps actuation steps 3 35 46 258 ( α = 40 ) 7 566 46 2975 ( α = 3 . 1 ) 10 1417 47 5972 ( α = 1 . 6 ) 30 14515 51 >30000 100 19848 61 >30000 • An optimal v alue of γ as a function of the grid parameters has been suggested in [9, Corollary 2] when K is unbounded, and seems to be an excellent choice also for K finite but sufficiently large. In the specific case of Figure 12, the recommended γ is 1 / (2 σ ( G )) = 0 . 004 . • For large K , tuning α becomes significantly simpler . All the ex ecutions of K 1 in T able III use the same parameter α = 100 and attain similar time to con vergence, while α needed to be substantially re-tuned when K = 1 . Controller performance: • By allowing many communication steps, the number of actuation steps required for con vergence is significantly reduced (see T able III). • The number of communication steps required for conv er- gence of the nested subproblem increases with the size of the network (although not exponentially). Remember that these steps only require communication and compu- tation, and we showed that they may also be performed asynchronously (in contrast to the actuation steps, which need to be synchronous). By using an asynchronous implementation of the inner loop data exchange, the time needed for a single communication step is only determined by the communication speed between two neighbouring nodes [19]. • The performance of the controller degrades gracefully if an upper bound on the communication steps is imposed (see T able IV). These findings indicate how the decomposition of the it- erativ e optimization scheme into an iteration that requires T ABLE IV: Actuation steps required for con vergence, for dif ferent values of K (communication steps) in a network of 30 nodes. K 100 300 1000 3000 10000 30000 actuation steps 724 211 67 39 50 51 actuation of the grid (and therefore cannot be executed too frequently) and a nested sequence of communication steps is fundamental for the ov erall scalability of the solution. V I . C O N C L U S I O N W e implemented for the first time a fully distributed peer- to-peer V olt/V Ar controller on a real low-v oltage distribution network. The controller at each in verter only uses local voltage measurements and the required model knowledge is only the electrical distance to its neighbors. No filtering or centralized estimation is needed, and the controller is able to driv e the system to an optimal point where all voltage and reactive power constraints are satisfied. Each in verter is allowed to communicate only with its neighbors in the electric topology . W e also showed that the performance of such a distributed strategy scales nicely with the size of the grid, as long as the communication rate is substantially higher than the measure- ment/actuation rate. Moreover , we highlight some directions for future inv estigation, such as optimizing the trade-off be- tween communication complexity and performance, detecting problem infeasibility , and analyzing finite-time conv ergence of the nested algorithm. V I I . A C K N O W L E D G M E N T The authors are grateful to Dimitrios Semitsoglou-Tsiapos for his support in adapting his distributed frame work to the control algorithm at hand. R E F E R E N C E S [1] S. Bolognani, R. Carli, G. Cavraro, and S. Zampieri, “On the need for communication for voltage regulation of power distribution grids, ” IEEE T rans. Contr ol Netw . Syst. , vol. 6, no. 3, pp. 1111–1123, 2019. [2] IEEE 1547-2018, “Standard for interconnection and interoperability of distributed energy resources with associated electric po wer systems interfaces, ” T ech. Rep., 2018. [3] “VDE-AR-N 4105: Generators connected to the L V distribution network – Technical requirements for the connection to and parallel operation with low-voltage distribution networks, ” 2018. [4] “Commission Regulation (EU) 2016/631 of 14 April 2016 establishing a network code on requirements for grid connection of generators, ” OJ , vol. L112, pp. 1–68, 2016. [5] S. Karagiannopoulos, P . Aristidou, and G. Hug, “Data-driv en local control design for active distribution grids using off-line optimal power flow and machine learning techniques, ” IEEE Tr ans. Smart Grid , 2019. [6] F . Dörfler, S. Bolognani, J. W . Simpson-Porco, and S. Grammatico, “Distributed control and optimization for autonomous power grids, ” in Pr oc. Eur opean Contr ol Conference (ECC) , Jun. 2019. [7] A. Bernstein and E. Dall’Anese, “Real-time feedback-based optimization of distribution grids: A unified approach, ” IEEE T rans. Control Netw . Syst. , vol. 6, no. 3, pp. 1197–1209, Sep. 2019. [8] L. Ortmann, A. Hauswirth, I. Caduff, F . Dörfler , and S. Bolognani, “Experimental validation of feedback optimization in power distribution grids, ” Electric P ower Systems Resear ch , 2020, to appear . [9] S. Bolognani, R. Carli, G. Cavraro, and S. Zampieri, “Distributed reactiv e power feedback control for voltage regulation and loss mini- mization, ” IEEE T rans. Autom. Control , vol. 60, no. 4, Apr . 2015. [10] F . Olivier, P . Aristidou, D. Ernst, and T . V an Cutsem, “ Activ e man- agement of low-v oltage networks for mitigating overv oltages due to photov oltaic units, ” IEEE T rans. Smart Grid , vol. 7, no. 2, pp. 926– 936, Mar . 2016. [11] S. Magnusson, C. Fischione, and N. Li, “Optimal voltage control using ev ent triggered communication, ” in Pr oc. 10th ACM Intl. Conf. Future Ener gy Systems , 2019, pp. 343–354. [12] G. Qu and N. Li, “Optimal distributed feedback voltage control under limited reactive power , ” IEEE Tr ans. P ower Syst. , vol. 35, no. 1, pp. 315 – 331, Jan. 2020. [13] S. Magnússon, G. Qu, C. Fischione, and N. Li, “V oltage control using limited communication, ” IEEE Tr ans. Contr ol Netw . Syst. , vol. 6, no. 3, pp. 993–1003, Sep. 2019. [14] S. Magnússon, G. Qu, and N. Li, “Distributed optimal voltage control with asynchronous and delayed communication, ” IEEE Tr ans. Smart Grid , 2020, in press. [15] D. P . Bertsekas, Nonlinear pr ogramming , 2nd ed. Belmont (MA): Athena Scientific, 1999. [16] S. Bolognani and F . Dörfler, “Fast power system analysis via implicit linearization of the power flow manifold, ” in 53rd Allerton Conf. , 2015. [17] S. Bolognani, “Grid topology identification via distributed statisti- cal hypothesis testing, ” in Big Data Application in P ower Systems , R. Arghandeh and Y . Zhou, Eds. Elsevier , 2018, pp. 281–301. [18] D. Deka and M. Chertkov , “T opology learning in radial distribution grids, ” in Big Data Application in P ower Systems , R. Arghandeh and Y . Zhou, Eds. Elsevier , 2018, pp. 261 – 279. [19] D. Semitsoglou-Tsiapos, “Evaluation of distributed algorithms for electric power systems applications, ” Master’ s thesis, T echnical Univ ersity of Denmark (DTU), 2019. [Online]. A vailable: https: //findit.dtu.dk/en/catalog/2452696264 [20] P . Hintjens, ZeroMQ: Messaging for many applications . " O’Reilly Media, Inc.", 2013. [21] A. M. Prostejovsky, O. Gehrke, A. M. Kosek, T . Strasser, and H. W . Bindner, “Distribution line parameter estimation under consideration of measurement tolerances, ” IEEE T ransactions on Industrial Informatics , vol. 12, no. 2, pp. 726–735, 2016.
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment