Characterizing Generic Global Rigidity
A d-dimensional framework is a graph and a map from its vertices to E^d. Such a framework is globally rigid if it is the only framework in E^d with the same graph and edge lengths, up to rigid motions. For which underlying graphs is a generic framewo…
Authors: ** - **A. Hendrickson** (University of Washington) - **D. P. Thurston** (University of California, Berkeley) **
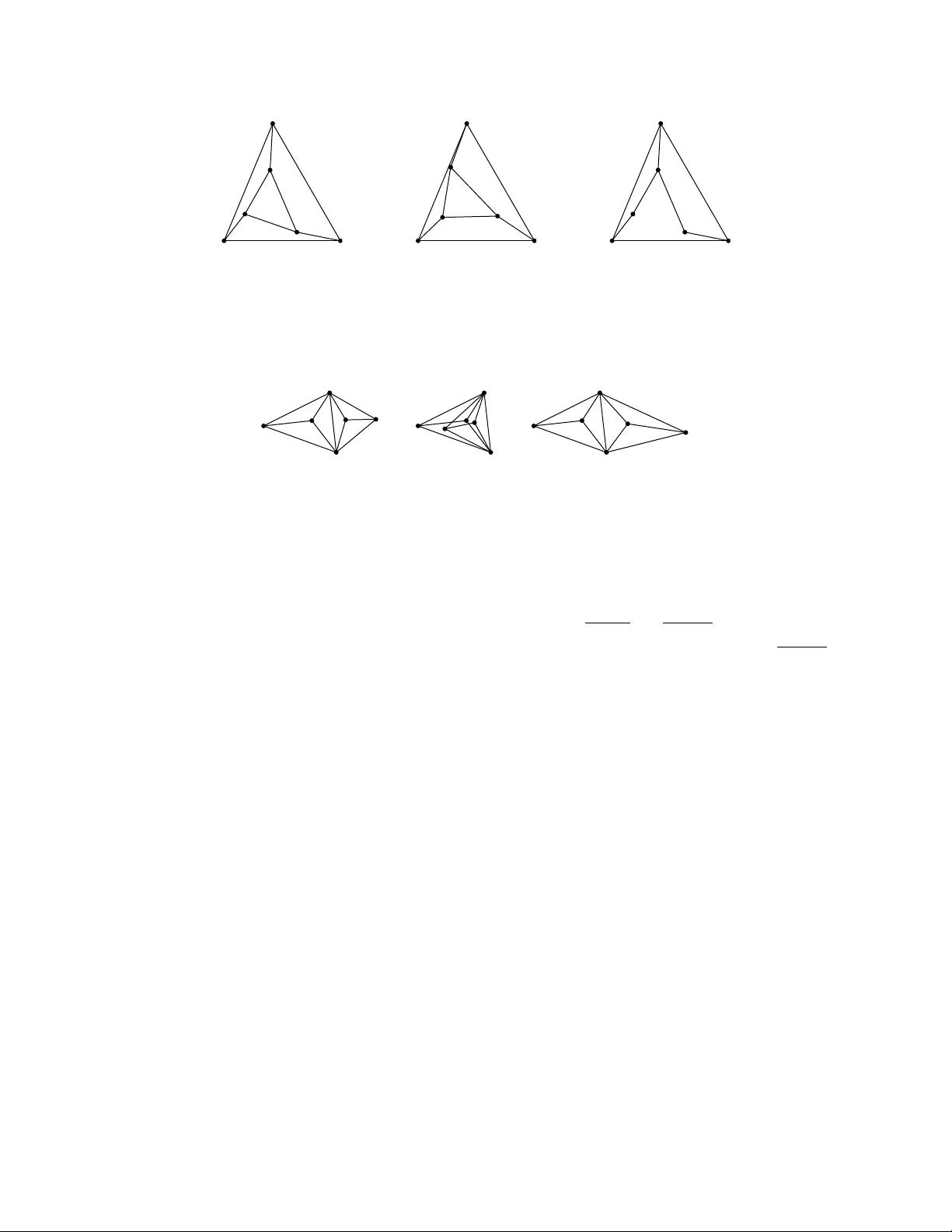
CHARA CTERIZING GENERIC GLOBAL RIGIDITY STEVEN J. GOR TLER, ALEXANDER D. HEAL Y, AND D YLAN P . THURSTON Abstract. A d -dimensional fr amework is a graph and a map from its v ertices to E d . Such a framework is glob al ly rigid if it is the only framew ork in E d with the same graph and edge lengths, up to rigid motions. F or whic h underlying graphs is a generic framew ork globally rigid? W e answ er this question b y pro ving a conjecture by Connelly , that his sufficient condition is also necessary: a generic framework is globally rigid if and only if it has a stress matrix with k ernel of dimension d + 1, the minimum p ossible. An alternate version of the condition comes from considering the geometry of the length- squared mapping ` : the graph is generically lo cally rigid iff the rank of ` is maximal, and it is generically globally rigid iff the rank of the Gauss map on the image of ` is maximal. W e also sho w that this condition is efficien tly c heck able with a randomized algorithm, and pro ve that if a graph is not generically globally rigid then it is flexible one dimension higher. 1. Introduction In this pap er w e characterize those generic framew orks which are globally rigid in d - dimensional Euclidean space. W e do this b y proving a conjecture of Connelly [ 10 ], who describ ed a sufficient condition for generic frameworks to b e globally rigid, and conjectured that this condition w as necessary . As this condition dep ends only on the graph and the dimension d , and not on the sp ecific (generic) framework of that graph, we can conclude that generic global rigidit y in E d is a prop ert y of a graph. W e further show that this prop ert y can b e c heck ed in probabilistic p olynomial time. Global rigidit y has applications in c hemistry , where v arious technologies measure inter- atomic distances. F rom this data one ma y try to infer the geometry of the configuration [ 11 , in ter alia]. This inference is only well p osed if the asso ciated framewo rk is globally rigid. Moreo v er, testing for generic global rigidity can b e used as part of a divide-and-conquer strategy for this inference [ 18 ]. Similar problems arise in the field of sensor netw orks [ 7 , in ter alia]. 1.1. Definitions and results. Definition 1.1. A gr aph Γ is a set of v vertices V (Γ) and e edges E (Γ), where E (Γ) is a set of tw o-elemen t subsets of V (Γ). W e will t ypically drop the graph Γ from this notation. A c onfigur ation of Γ in E d is a mapping from V (Γ) to Euclidean space E d . A fr amework ρ in E d is a graph Γ together with a configuration of Γ in E d ; we will also say that ρ is a framework of Γ. Let C d (Γ) denote the space of frameworks with a given graph Γ and dimension d . F or ρ ∈ C d (Γ) and u ∈ V (Γ), let ρ ( u ) denote the image of u under the configuration of ρ . F or a giv en graph Γ and dimension d , the length-squar e d function ` : C d (Γ) → R e is the function assigning to each edge of Γ its squared edge length in the framew ork. In particular, the comp onen t of ` ( ρ ) in the direction of an edge { u, w } is | ρ ( u ) − ρ ( w ) | 2 . 1991 Mathematics Subje ct Classific ation. 05C62; 14P99. 1 2 GOR TLER, HEAL Y, AND THURSTON Definition 1.2. A framework ρ in E d is c ongruent to another framew ork if they are re- lated b y an elemen t of the group Eucl( d ) of rigid motions of E d (rotations, reflections, and translations). W e say that ρ is glob al ly rigid if ρ is the only framework of Γ in E d with the same edge lengths, up to congruence. Equiv alen tly , ρ is globally rigid iff ` − 1 ( ` ( ρ )) / Eucl( d ) consists of [ ρ ], the congruence class of framew orks which con tains ρ . Definition 1.3. A framework ρ ∈ C d (Γ) is lo c al ly rigid if there exists a neighborho o d U of ρ in C d (Γ) suc h that ρ is the only framework in U with the same set of edge lengths, up to congruence; equiv alen tly , [ ρ ] is isolated in ` − 1 ( ` ( ρ )) / Eucl( d ). (This prop ert y is usually just called rigidity but w e will use term lo c al rigidity in this pap er to make explicit its distinction from glob al rigidity .) Definition 1.4. A framework is generic if the co ordinates of its configuration do not satisfy an y non-trivial algebraic equation with rational co efficien ts. W e first deal with graphs with very few v ertices. Asimo w and Roth pro v ed that a generic framew ork ρ in E d of a graph Γ with d + 1 or fewer v ertices is globally rigid if Γ is a complete graph (i.e., a simplex), otherwise it is not even lo cally rigid [ 1 , Corollary 4]. Therefore in the rest of the pap er we may assume that our graph has d + 2 or more vertices. In particular, this implies that a generic framework do es not lie in a prop er affine subspace of E d . Since Eucl( d ) acts freely on framew orks that do not lie in a prop er affine subspace of E d , for suc h a framework ρ , the fiber ` − 1 ( ` ( ρ )) alwa ys has dimension at least dim(Eucl( d )) (which is d +1 2 ). In particular, a generic framework with at least d + 1 vertices satisfies this condition. The in tuition b ehind the following definition and theorem is that the dimension of a generic fib er of an algebraic map f is the same as the kernel of the Jacobian d f x of f at a generic p oin t x , and for a generic lo cally rigid framew ork the k ernel of d f x only con tains the tangen ts to the action of Eucl( d ). Definition 1.5. Let d` ρ b e the rigidity matrix of ρ , the Jacobian of ` at the framework ρ ; b y definition, this is a linear map from C d (Γ) to R e . A framew ork ρ ∈ C d (Γ) of a graph Γ with d + 1 or more vertices is infinitesimal ly rigid if (1) rank d` ρ = dim( C d (Γ)) − dim(Eucl( d )) = v d − d + 1 2 . Theorem 1.6 (Asimow-Roth [ 1 ]) . If a generic fr amework ρ ∈ C d (Γ) of a gr aph Γ with d + 1 or mor e vertic es is lo c al ly rigid in E d , then it is infinitesimal ly rigid. Otherwise rank d` ρ is lower than v d − d +1 2 . Since the rank of the linearization an algebraic map is the same (and maximal) at every generic p oin t, lo cal rigidit y in E d is a generic prop ert y . (See also Lemma 5.6 .) That is, either all generic framew orks in C d (Γ) are lo cally rigid, or none of them are. Th us w e can call this condition generic lo c al rigidity in E d and consider it as a prop ert y of the graph Γ. W e next define some concepts we need to state the condition for generic global rigidity . Definition 1.7. An e quilibrium str ess ve ctor of a framew ork ρ of Γ is a real v alued function ω on the (undirected) edges of Γ so that for all vertices u ∈ V , (2) X { w ∈V |{ u,w }∈E } ω ( { u, w } )( ρ ( w ) − ρ ( u )) = 0 . CHARA CTERIZING GENERIC GLOBAL RIGIDITY 3 (Note that the all-zero function is an equilibrium stress vector for any ρ .) Let S ( ρ ) b e the v ector space of equilibrium stress vectors of the framew ork ρ . R emark 1.8 . In many cases, w e can interpret ( 2 ) as sa ying that eac h vertex u is the weigh ted a v erage of its neigh b ors, with w eigh ts giv en by ω ( { u, w } ). This in terpretation breaks do wn if P w ω ( { u, w } ) = 0, as happ ens, for instance, for K 5 , 5 in E 3 . (See Section 3.4 .) An alternate in terpretation is that if we put springs on the edges of Γ with spring constants given by ω , the resulting forces on each vertex balance out. Note, ho wev er, that some of the spring constan ts in the graph are necessarily negative, and the rest p osition is when the spring is at zero length. Definition 1.9. An e quilibrium str ess matrix of a framework ρ of Γ is a rearrangement of an equilibrium stress vector into a matrix form, with suitably chosen diagonal en tries. More precisely , it is a matrix Ω indexed by V × V so that (1) for all u, w ∈ V , Ω( u, w ) = Ω( w , u ); (2) for all u, w ∈ V with u 6 = w and { u, w } 6∈ E , Ω( u, w ) = 0; (3) for all u ∈ V , P w ∈V Ω( u, w ) = 0; and (4) for all u ∈ V , P w ∈V Ω( u, w ) ρ ( w ) = 0. F or every equilibrium stress vector ω there is a unique equilibrium stress matrix Ω so that for u 6 = w and { u, w } ∈ E , Ω( u, w ) = ω ( { u, w } ), and con versely . (This implies that Ω( u, u ) = − P w 6 = u ω ( { u, w } ).) Th us we will freely conv ert b et wee n equilibrium stress vectors ω and equilibrium stress matrices Ω. If Ω is an equilibrium stress matrix for ρ , w e will also say that ρ satisfies the stress matrix Ω. Definition 1.10. F or Ω an equilibrium stress matrix, the str ess kernel K (Ω) is the kernel of Ω. It is isomorphic to the space of frameworks of Γ in E 1 whic h ha ve Ω as an equilibrium stress. Let k (Ω) or simply k b e dim( K (Ω)). Let k min (Γ , d ) or just k min b e the minimal v alue of k (Ω) as Ω ranges o v er all stress matrices of all generic frameworks in C d (Γ). As has b een noted b y Hendrickson [ 18 , Theorem 2.5], for eac h fixed generic framework ρ , the minimal v alue of k (Ω) as Ω ranges o v er S ( ρ ) agrees with this k min . Indeed k (Ω) = k min for all generic frameworks ρ and generic Ω ∈ S ( ρ ), suitably defined. (See Lemma 5.8 .) K (Ω) alwa ys contains the subspace spanned by the co ordinates of ρ along each axis and the vector ~ 1 of all 1’s. This corresp onds to the fact that any affine image of ρ satisfies all of the equilibrium stress matrices in S ( ρ ). If ρ do es not lie in a prop er affine subspace of E d , these vectors are indep enden t and span a ( d + 1)-dimensional space. W e ha ve therefore pro v ed the follo wing lemma. Lemma 1.11. F or fr ameworks of a gr aph Γ with at le ast d + 1 vertic es, k min (Γ , d ) ≥ d + 1 . Definition 1.12. A graph Γ has a minimal str ess kernel in E d if k min (Γ , d ) = d + 1. W e can now state Connelly’s criterion for generic global rigidity . Theorem 1.13 (Connelly [ 10 ]) . If a gr aph Γ with d + 2 or mor e vertic es has a minimal str ess kernel in E d , then al l generic fr ameworks ρ ∈ C d (Γ) ar e glob al ly rigid. Our main result is the con v erse of Connelly’s result, whic h completes the characterization of generic global rigidity . 4 GOR TLER, HEAL Y, AND THURSTON Theorem 1.14. If a gr aph Γ with d + 2 or mor e vertic es do es not have a minimal str ess kernel in E d , then any generic fr amework ρ ∈ C d (Γ) is not glob al ly rigid. The pro of of Theorem 1.14 is in Section 2 . Putting these tw o together, w e can also conclude that global rigidit y is a generic prop ert y . Corollary 1.15. Either al l generic fr ameworks in C d (Γ) of a gr aph ar e glob al ly rigid, or none of them ar e. Thus we c an c al l this c ondition generic global rigidit y in E d and c onsider it as a pr op erty of a gr aph. Since the condition is an algebraic condition, equiv alen t statemen ts to generic global rigid- it y in E d include the following: • frameworks in a Zariski op en subset of C d (Γ) are globally rigid; or • frameworks in a subset of full measure of C d (Γ) are globally rigid. In fact, we can deduce a stronger statement. Corollary 1.16. If a gr aph Γ with d + 2 or mor e vertic es do es not have a minimal str ess kernel in E d , then any infinitesimal ly rigid fr amework ρ ∈ C d (Γ) is not glob al ly rigid. (This corollary can also b e prov en by com bining corollary 1.15 with [ 8 , Prop osition 2.4].) Pr o of. Let ρ 0 b e an infinitesimally rigid framew ork. First note that ρ 0 do es not lie in an y affine subspace of E d , so b y Prop osition 2.13 it maps to a smo oth p oin t [ ρ 0 ] in the quotien t C d (Γ) / Eucl( d ). By the in verse function theorem, [ ρ 0 ] has an op en neigh b orho od N that maps injectively in to the space of edge lengths. Consider a sequence { [ ρ i ] } of classes of generic configurations inside N approac hing [ ρ 0 ]. By Theorem 1.14 , for each ρ i there is an inequiv alent configuration σ i with the same edge lengths. Because the map ` is prop er on C d (Γ) / Eucl( d ) (see Lemma 2.34 ), the sequence { [ σ i ] } has an accum ulation p oin t [ σ 0 ], with ` ( σ 0 ) = ` ( ρ 0 ) by con tin uit y . Since ` is injective on N , w e ha v e [ σ i ] 6∈ N and so [ σ 0 ] 6∈ N ; th us σ 0 is the desired framework with the same edge lengths as ρ 0 but not congruent to ρ 0 . Note that there is no hope for a similar strengthening of Theorem 1.13 ; global rigidit y can fail at non-generic p oin ts in any num ber of wa ys, for instance if there is a transv erse self-in tersection of the image space ` ( C d (Γ)). As a corollary of Theorems 1.13 and 1.14 , w e find an efficien t algorithm for chec king for generic global rigidity . Theorem 1.17. Ther e is a p olynomial-time r andomize d algorithm for che cking for generic glob al rigidity in E d . Essen tially , you take random a framework ρ in C d (Γ), using sufficien tly large random n um b ers as co ordinates, and a random equilibrium stress matrix Ω of ρ . Then with high probabilit y , dim(ker(Ω)) = k min . In Section 5 we prov e a more precise version of this state- men t (Theorem 5.10 ), in particular giving b ounds on “sufficien tly large”. One further result, arising from similar considerations in volv ed in the pro of of Theo- rem 1.14 , is the following: Theorem 1.18. If a gr aph Γ is not generic al ly glob al ly rigid in E d , then any generic fr ame- work ρ in C d (Γ) c an b e c onne cte d to some inc ongruent fr amework σ in C d (Γ) by a p ath of fr ameworks of Γ in E d +1 with c onstant e dge lengths. Theorem 1.18 is prov ed in Section 6 . CHARA CTERIZING GENERIC GLOBAL RIGIDITY 5 1.2. Relationship to previous work. The problem of d -em b eddabilit y , determining if there is a framew ork of a graph in E d with a giv en set of (in teger) edge lengths, w as sho wn to b e strongly NP-hard by Saxe [ 26 ]. Saxe also show ed that the problem of determining global rigidit y is strongly NP-hard. The proof starts with the observ ation that a 1-dimensional framew ork of a graph formed of n v ertices connected in a cycle is a solution to the partition problem on the edge lengths. But there has b een some hope that global rigidity can b e characterized and efficiently tested if one suitably restricts the input to av oid certain coincidences (lik e the coincidence that there b e tw o solutions to a partition problem that has at least one solution). In partic- ular, one strong wa y of restricting the problem is to assume that the original framew ork is generic. F or example, it is easy to see that a generic framework of a graph is globally rigid in E 1 iff the graph is 2-connected. Hendric kson [ 18 ] describ es the condition of Theorem 1.13 ascrib ed to Connelly (CC for short), for generic framew orks of a graph to b e globally rigid in E d . Connelly pro v ed the suf- ficiency of this condition [ 10 ]. Connelly also conjectured that CC w as a necessary condition, our Theorem 1.14 . Hendric kson also gav e [ 17 ] t w o necessary conditions (HC for short), for generic framew orks of Γ to b e globally rigid in E d . Namely , Γ must b e ( d + 1)-connected and deleting an y edge of Γ must leav e a generically lo cally rigid graph. A combinatorial result of Jac kson and Jord´ an [ 19 ] effectiv ely sho ws that for d = 2, CC = HC, and so b oth conditions are necessary and sufficien t. They later gav e a direct pro of of the sufficiency of HC for d = 2 [ 20 ]. Moreo v er in 2 dimensions, generic lo cal rigidity and therefore generic global rigidity can b e c haracterized combinatorially [ 21 ] and deterministically solved for efficiently [ 23 , inter alia]. Connelly sho w ed [ 9 ] that HC are not sufficien t to sho w that a generic framew ork is globally rigid for d ≥ 3; specifically , he sho w ed that the complete bipartite graph K 5 , 5 , despite satisfying HC, is not globally rigid in 3 dimensions for some generic framew orks. Similar results hold for larger bipartite graphs in higher dimensions. These app ear to b e the only kno wn examples of such graphs. (See Sections 3.2 and 3.3 for more on graphs that fail HC, and Section 3.4 for more on K 5 , 5 .) 1.3. Structure of the pap er. W e prov e the main result in Section 2 and giv e a few exam- ples of the relev an t spaces in Section 3 . In Section 4 we give an alternate characterization of generic global rigidity in terms of the shar e d str ess kernel (the in tersection of the k ernels of all stress matrices) or, alternatively , the rank of the Gauss map . (The Gauss map is the map that tak es a smo oth p oint of an algebraic v ariety to its tangen t space, considered as a p oin t in an appropriate Grassmannian.) W e also relate the theorem to the more general algebraic geometry setting of secant v arieties and Zak’s theorem. W e then show that the condition of generic global rigidity can b e chec k ed in randomized p olynomial time in Section 5 , follo wing remarks of Hendric kson [ 17 , 18 ]. In Section 6 we pro ve Theorem 1.18 . Throughout this pap er, w e attempt to giv e enough details for readers who are not very familiar with algebraic geometry , while at the same time indicating ho w the more abstract argumen ts w ork. 6 GOR TLER, HEAL Y, AND THURSTON A (Ω) A (Ω) / Eucl( d ) B (Ω) L (Ω) C d (Γ) C d (Γ) / Eucl( d ) M (Γ) R e same dim same dim same dim Figure 1. The main spaces in v olved in the pro of of Theorem 1.14 Ac kno wledgemen ts. W e w ould like to thank Rob ert Connelly , Daniel F reedman, Y ael Karshon, J. M. Landsb erg, Amit Singer, Ileana Strein u and an anon ymous referee for helpful con v ersations and suggestions. AH was supported by NSF gran t CCR-0205423 and a Sandia fello wship. DPT was supp orted by a Sloan research fellowship. 2. Proof of main theorem Our basic strategy for the pro of of Theorem 1.14 is similar in spirit to the approach used b y Hendric kson [ 17 ] to show the necessit y of what he called “redundan t rigidit y” for a generic global rigidit y in E d . Giv en a graph Γ which do es not ha ve a minimal stress k ernel in E d , w e construct spaces X and Y and a map f : X → Y so that the preimages in X of a p oin t in Y corresp ond to incongruent frameworks with the same edge lengths. W e then sho w that the “degree mo d-tw o” of this map is well defined and equal to 0. This degree is equal to the n um b er of preimages at a regular v alue, mo dulo 2. Th us for suc h a map, any regular v alue in the image m ust hav e at least one more preimage, whic h represents a distinct framework in C d (Γ) with the same edge lengths, thus con tradicting global rigidity in E d . T o guarantee a well defined degree, we will not ha ve the luxury of the domain b eing a compact manifold. Rather the domain will b e a smo oth space with singularities of co-dimension 2 or greater, and f will b e a pr op er map . (See Definition 2.33 and Theorem 2.35 .) The main spaces inv olv ed in the pro of are summarized in Figure 1 , as w e now explain. W e start with the map ` from C d (Γ) to R e , and factor it through the quotient by the Euclidean group, follow ed b y the surjection on to its image M (Γ) ⊂ R e . The spaces C d (Γ) / Eucl( d ) and its image M (Γ) hav e the same dimension by lo cal rigidity . W e next take any generic ρ and pic k an equilibrium stress Ω for ρ which is generic in a suitable sense, and consider the space A (Ω) of all frameworks satisfying Ω. As motiv ation for this, recall that Connelly’s proof of Theorem 1.13 first sho ws that for an y generic framew ork ρ and a global flex σ of it, the map ` agrees on neigh b orho ods of ρ and σ [ 10 , Prop osition 3.3]. In particular, the tangent space to M (Γ) at ρ and σ agree, so any equilibrium stress for ρ is also an equilibrium stress for σ . (Compare Lemma 2.21 .) Th us σ must lie in A (Ω), for any Ω ∈ S ( ρ ). So we ma y as w ell lo ok for a global flex within such a space A (Ω). W e define the domain of our map to b e A (Ω) / Eucl( d ). In Prop osition 2.13 , w e sho w that if the stress kernel of Ω is of dimension greater than d + 1, then this domain has singularities of co dimension at least 2. This is based on recognizing A (Ω) as K (Ω) d , where K (Ω) is the stress kernel as in Definition 1.10 . W e also consider the image of A (Ω) under ` , denoted B (Ω) ⊂ M (Γ). Again, b y lo cal rigidit y , the quotien t A (Ω) / Eucl( d ) and B (Ω) ha v e the same dimension. If we view the equilibrium stress vector as defining a hyperplane in R e , we can then alternately view B (Ω) as the c ontact lo cus of the corresp onding equilibrium stress ω : the set of p oin ts in M (Γ) CHARA CTERIZING GENERIC GLOBAL RIGIDITY 7 whose tangent space is contained in the hyperplane defined b y ω . A fundamental theorem of algebraic geometry sa ys that a generic con tact lo cus is flat : it is con tained in a linear space L (Ω) of the same dimension. (See Prop osition 2.20 .) The space L (Ω) serves as the range. Our map ` is the restriction of ` to this domain and range. Since the singularities of the domain ha v e co dimension at least 2, ` will ha ve a w ell-defined degree. The final step in the pro of is that this degree is 0, whic h is guaranteed by noticing that any p oint in R e with at least one negative co ordinate is not in the image of ` . If a generic framework in C d (Γ) is not lo cally rigid, then it is clearly not globally rigid, in whic h case our pro of is done. So, in what follows, we will assume that the framework ρ ∈ C d (Γ) is lo cally rigid and has at least d + 2 v ertices, and so by Theorem 1.6 , rank d` ρ = v d − d +1 2 . 2.1. Algebraic geometry preliminaries. W e start with some preliminaries ab out semi- algebraic sets from real algebraic geometry , somewhat sp ecialized to our particular case. F or a general reference, see, for instance, the b o ok by Bo c hnak, Coste, and Roy [ 5 ]. Definition 2.1. An affine, real algebr aic set or variety V defined ov er a field k contained in R is a subset of R n that is defined by a set of algebraic equations with co efficien ts in k . It is irr e ducible if it is not the union of t w o prop er algebraic subsets defined o ver R . An algebraic set has a dimension dim( V ), whic h w e will define as the largest t for which there is an op en (Euclidean) subset of V isomorphic to R t . A p oin t x of an irreducible algebraic set V is smo oth if it has a neigh b orho o d that is smo othly isomorphic to R dim( V ) ; in this case there is a w ell-defined tangen t space T x ( V ). (Note that there ma y b e p oints with neigh b orho ods isomorphic to R n for some n < dim( V ); w e do not consider these p oints to b e smo oth.) Definition 2.2. A semi-algebr aic set S ov er k is a subset of R n defined b y algebraic equalities and inequalities with co efficien ts in k ; alternativ ely , it is the image of an algebraic set (defined only b y equalities) under an algebraic map with co efficien ts in k . A semi-algebraic set has a w ell defined (maximal) dimension t . The Zariski closur e of S is the smallest algebraic set o v er R containing it. (Lo osely sp eaking, w e can get an algebraic set b y keeping all algebraic equalities and dropping the inequalities. W e may need to enlarge the field to cut out the smallest algebraic set con tain- ing S but a finite extension will alwa ys suffice.) W e call S irr e ducible if its Zariski closure is irreducible. (W e c hose here to define the Zariski closure as w ell as the notion of irreducibilit y using the field R instead of Q or k in order to a v oid complications in the pro of of Prop osi- tion 2.18 b elo w.) An irreducible semi-algebraic set S has the same dimension as its Zariski closure. A p oin t on S is smo oth if it has a neigh b orho o d in S smo othly isomorphic to R dim( S ) . W e denote b y smo oth( S ) the lo cus of smo oth p oints of S . It to o is semi-algebraic. W e call S itself smo oth if smo oth( S ) = S . Supp ose that S is a smo oth irreducible semi-algebraic set. Let φ b e a non-zero algebraic function on S . Its zero set is stratified as a union of a finite n umber of smo oth manifolds eac h with dimension less than dim( S ), so (since S is smo oth) the complemen t of the zero set (i.e., { x ∈ S | φ ( x ) 6 = 0 } ) is op en and dense in S . Definition 2.3. The image of ` is called the me asur ement set and denote b y M (Γ) or just M . It is a semi-algebraic set defined ov er Q . 8 GOR TLER, HEAL Y, AND THURSTON Lemma 2.4. The semi-algebr aic set M is irr e ducible. Pr o of. M is the image of C d (Γ) under a polynomial map. Since C d (Γ) is irreducible and the image of an irreducible v ariet y is irreducible, it follo ws that M is irreducible. The dimension of M is the rank of d` ρ at an y generic configuration ρ (and is v d − d +1 2 when the graph is generically lo cally rigid in E d ). More precisely , the tangen t space to M for generic ρ is the span of the image of d` ρ . W e next define genericity in larger generality and giv e some basic prop erties. Definition 2.5. A p oin t in a (semi-)algebraic set V defined o v er k is generic if its co ordinates do not satisfy an y algebraic equation with co efficien ts in k b esides those that are satisfied b y ev ery p oin t on V . Almost every p oin t in an irreducible semi-algebraic set V is generic. Note that the defining field migh t c hange when w e take the Zariski closure. How ev er, this do es not matter for the purp oses of genericity . More formally , if k is a finite algebraic extension of Q and x is a generic p oin t in an irreducible semi-algebraic set S defined o ver k , then x is also generic in the Zariski closure of S o v er an appropriate field. This follows from a t w o step argumen t. First, an elementary argumen t from Galois theory prov es that the (real) Zariski closure V of S can b e defined using p olynomials ov er a field k 0 whic h is some finite extension of k . Second, another elementary argumen t from Galois theory prov es that if a p oin t x satisfies an algebraic equation with co efficien ts in k 0 that is non-zero ov er V , then x m ust also satisfy some algebraic equation with co efficien ts in k that is non-zero ov er V . The following prop osition is standard: Prop osition 2.6. Every generic p oint of a (semi-)algebr aic set is smo oth. Lemma 2.7. L et V and W b e irr e ducible semi-algebr aic sets and f : V → W b e a surje ctive algebr aic map, al l define d over k . Then if x 0 ∈ V is generic, f ( x 0 ) is generic inside W . Pr o of. Consider an y non-zero algebraic function φ on W defined ov er k . Then x 7→ φ ( f ( x )) is a function on V that is not iden tically zero. Thus if x 0 is a generic p oint in V , φ ( f ( x 0 )) 6 = 0. Since this is true for all φ , it follo ws that f ( x 0 ) is generic. Th us, instead of sp eaking of a generic configuration in C d (Γ), we may sp eak of a generic p oin t on M : if a configuration ρ is generic in C d (Γ), then ` ( ρ ) is generic in M . Lemma 2.8. L et k b e a finite algebr aic extension of Q . L et V and W b e irr e ducible semi- algebr aic sets with V smo oth, and let f : V → W b e a surje ctive algebr aic map, al l define d over k . Then if y 0 ∈ W is generic, ther e is a p oint in f − 1 ( y 0 ) that is generic in V . Pr o of. Let φ b e a non-zero algebraic function on V defined ov er k . W e start b y showing there is a p oin t x ∈ f − 1 ( y 0 ) so that φ ( x ) 6 = 0. Consider the semi-algebraic set X φ : = { x ∈ V | φ ( x ) 6 = 0 } . This is dense in V due to irreducibilit y and smo othness, so its image f ( X φ ) is dense in W . Therefore Y φ : = W \ f ( X φ ) is a semi-algebraic subset of W that is nowhere dense. It follo ws that there is a non-zero algebraic function ψ on W defined o v er k that v anishes when restricted to Y φ . But then since y 0 is generic, ψ ( y 0 ) 6 = 0, which means that y 0 is in the image of X φ , so there is an x ∈ f − 1 ( y 0 ) so that φ ( x ) 6 = 0, as desired. Let Z φ = { x ∈ f − 1 ( y 0 ) | φ ( x ) = 0 } . W e ha v e shown Z φ is a prop er subset of f − 1 ( y 0 ) for all non-zero algebraic functions φ on V . It follows that for any finite collection of φ i , the union of the Z φ i is still a proper subset of f − 1 ( y 0 ) (as we can consider the product of the φ i ). CHARA CTERIZING GENERIC GLOBAL RIGIDITY 9 But there are only coun tably man y p ossible φ ov erall, and a countable union of algebraic subsets cov ers an algebraic set iff some finite collection of them do. (Pro of: this is true for eac h irreducible comp onen t, as a prop er algebraic subset has measure zero, and there are only finitely many irreducible comp onen ts.) Th us the union of the Z φ do not cov er f − 1 ( y 0 ), i.e., there is a generic p oin t in f − 1 ( y 0 ). Lemma 2.9. L et V ⊂ W b e an inclusion of r e al algebr aic varieties, wher e W (but not V ) is define d over Q . Supp ose that V is smo oth and irr e ducible and that it has one p oint y which is generic in W (over Q ). Then the p oints in V which ar e generic in W ar e dense in V . Note that in this lemma the p oin ts w e consider are differ ent from the p oints that are generic in V , since V is not defined using only the rationals. (If V w ere defined using the rationals and w ere properly contained in W , then it w ould ha v e no p oin ts whic h w ere generic in W : any rational equation defining V would b y definition v anish for all x ∈ V .) Pr o of. Let φ b e a non-zero algebraic function on W defined ov er Q . Consider the semi- algebraic set X φ : = { x ∈ V | φ ( x ) 6 = 0 } . This is non empty due to our assumption ab out the p oin t y . Th us X φ is op en and dense in V , due to irreducibility and smo othness. The set of p oints in V which are generic in W is defined as the intersection of the X φ as φ ranges o v er the coun table set of p ossible φ . Since V is a Baire space, such a coun table in tersection of op en and dense subsets m ust itself b e a dense subset. 2.2. The domain. T o construct the domain, w e start by considering str ess satisfying frame- w orks. Definition 2.10. Let Ω b e an equilibrium stress matrix of some framework in C d (Γ). The space of str ess satisfiers A (Ω) is the space of all d -dimensional framew orks that satisfy Ω: (3) A (Ω) : = { σ ∈ C d (Γ) | Ω ∈ S ( σ ) } . Lemma 2.11. The sp ac e A (Ω) is isomorphic to K (Ω) d and has dimension k (Ω) d . In p ar- ticular, if Ω ∈ S ( ρ ) , then A (Ω) c ontains the sp ac e Aff ( ρ ) of affine images of ρ . Pr o of. Since Equation ( 2 ) is an equation for eac h co ordinate separately , a framew ork satisfies an equilibrium stress iff eac h of its pro jections on the co ordinate axes do es. But K (Ω) is isomorphic to the space of 1-dimensional framew orks of Γ that hav e Ω as an equilibrium stress, so it follows that A (Ω) is K (Ω) d . The remaining statemen ts are immediate. W e now study the quotien t A (Ω) / Eucl( d ), which, for an appropriate choice of Ω, will b e the domain of our main map. If Γ is generically lo cally rigid and A (Ω) includes some framew ork generic in C d (Γ), this space is of dimension k (Ω) d − d +1 2 . W e need to understand the singularities of this quotien t, and in particular sho w that they hav e co dimension at least 2 in appropriate cases (so that we can apply Corollary 2.36 ). W e will reduce the question to the following lemma. Lemma 2.12. If n > d , the quotient sp ac e ( E d ) n / Eucl( d ) (i.e., n -tuples of p oints in E d , quotiente d by Eucl( d ) acting diagonal ly) is a smo oth str atifie d sp ac e with singularities of c o dimension n − d and higher. F urthermor e, the singularities o c cur at classes of p oints in E d that lie inside a pr op er affine subsp ac e of E d . Here a smo oth stratified space is, lo osely sp eaking, a space which is decomp osed into smo oth manifolds of differing dimensions, limiting on to each other in a nice wa y . F or instance, 10 GOR TLER, HEAL Y, AND THURSTON an y semi-algebraic set, with an y t ype of singularities, has the structure of a smooth stratified space. F or a formal definition and discussion, see [ 24 ]. Pr o of. In general, the quotien t of a v ariet y b y a group acting prop erly is stratified by con- jugacy classes of stabilizers [ 24 , Corollary 4.3.11]. In particular the p oin ts with trivial sta- bilizer form a manifold. Let us therefore iden tify the p oin ts in ( E d ) n where the stabilizer is non-trivial. The k ey observ ation is that an n -tuple is stabilized b y a non-trivial Euclidean transform if and only if the dimension of its affine span is less than d . F or example, if all p oin ts lie in a hyperplane of dimension d − 1, then they are stabilized by the reflection across that plane. In general, if the affine span of the n -tuple is co dimension r , the stabilizer is isomorphic to the orthogonal group in r dimensions, O ( r ). The lo w est co dimension case is when r = 1, in whic h case the stabilizer is O (1) ' Z / 2. T o compute the co dimension of these n -tuples with r = 1 in ( E d ) n , pic k d out of the n p oin ts that span the subspace; these p oints are unrestricted. The remaining n − d p oin ts m ust lie in that subspace, pro viding one constraint for each p oint, so these n -tuples ha ve co dimension n − d . In general, a similar coun t shows that n -tuples with a stabilizer of O ( r ) are of co dimension r ( n − d + r − 1) in ( E d ) n . Inside the quotien t ( E d ) n / Eucl( d ), the co dimension of the singular set is decreased b y the dimension of the stabilizer. Th us p oin ts with stabilizer O (1) still ha ve co dimension n − d in the quotient, and in general the the co dimension in the quotien t of p oints with stabilizer O ( r ) is (4) r ( n − d + r − 1) − r 2 = r ( n − d ) + r 2 ≤ n − d. Prop osition 2.13. Supp ose that Ω is e quilibrium str ess matrix so that k > d + 1 . Then A (Ω) / Eucl( d ) is a smo oth str atifie d sp ac e with singularities of c o dimension at le ast 2. F ur- thermor e, the singularities o c cur at classes of fr ameworks [ σ ] wher e σ lies in a pr op er affine subsp ac e of E d . Pr o of. Remember that A (Ω) ' K (Ω) d b y Lemma 2.11 . W e can view this space as K (Ω) ⊗ R d with Eucl( d ) acting on the d -dimensional co ordinates. W e can turn this tensor pro duct around: instead of thinking of A (Ω) as a d -tuple of p oints in K (Ω), think of it as a k -tuple of p oin ts in E d , with the diagonal action of Eucl( d ). Concretely , y ou can alwa ys find k v ertices of the graph whose p osition determines the p osition of all other vertices of a framew ork inside A (Ω). Then A (Ω) is isomorphic to ( R d ) k , thought of as the p ositions of these k v ertices. No w by Lemma 2.12 , A (Ω) / Eucl( d ) is a smo oth stratified space with singularities of co di- mension at least k − d , at framew orks whic h lie in a prop er affine subspace. By assumption, k > d + 1, and so this co dimension is at least 2. 2.3. The range. W e now turn to defining the range. Definition 2.14. Let Ω b e an equilibrium stress matrix of some framework in C d (Γ). The space B (Ω) is defined to b e ` ( A (Ω)), the image in R e of squared edge lengths of elements in A (Ω). Let L (Ω) to b e the smallest linear subspace of R e that contains B (Ω). Note that B (Ω) is a semi-algebraic set. If the graph is generically lo cally rigid in E d and A (Ω) contains a framew ork generic in C d (Γ), then B (Ω), lik e A (Ω) / Eucl( d ), is of dimension k d − d +1 2 (as the map ` is lo cally one-to-one from the quotien t). The space L (Ω), for an appropriately chosen Ω, will b e the range space for our map. Our main task is to pro ve that CHARA CTERIZING GENERIC GLOBAL RIGIDITY 11 for any generic ρ and appropriately chosen Ω ∈ S ( ρ ), L (Ω) is in fact the same dimension as B (Ω), or that B (Ω) is flat as in the following definition. Definition 2.15. An irreducible semi-algebraic set S in R n is flat if it is con tained in a linear subspace of R n of the same dimension as S . Note that this usage of flat is unrelated to the notion of flat families in algebraic geometry , and an algebraic v ariet y is flat by this usage iff it is itself a linear space. The k ey p oint in sho wing that B (Ω) is flat is Prop osition 2.20 , a standard theorem asserting that for an y algebraic v ariety V , the contact locus of a generic h yp erplane in the dual v ariet y V ∗ is flat. W e recall these definitions and theorems. See [ 15 ] for a more complete treatment. Definition 2.16. W e say that a h yp erplane H is tangent to a homogeneous algebraic set V ⊂ R n at a smo oth p oin t x ∈ V if T x ( V ) ⊂ H . F or φ a functional in the dual space ( R n ) ∗ , w e sa y that φ is tangent to V at x when T x ( V ) ⊂ ker( φ ). F or a homogeneous algebraic set V in R n , define the dual variety V ∗ ⊂ ( R n ) ∗ to b e the Zariski closure of the set of all functionals that are tangen t to V at a smo oth p oin t. The c onormal bund le C V ⊂ R n × ( R n ) ∗ is the Zariski closure of the pairs ( x, φ ) where x is a smooth p oin t of V and φ is tangen t to V at x . There are tw o natural pro jections, π 1 : C V → V and π 2 : C V → V ∗ . Ab o v e the smo oth p oin ts of V , C V is smo oth, although the pro jection on to V ∗ need not b e. F or φ ∈ V ∗ , define the c ontact lo cus V φ of φ to b e π 1 ( π − 1 2 ( φ )). In particular, this contains the smo oth p oin ts x ∈ V so that φ is tangent to V at x . R emark 2.17 . In Lemma 2.21 w e relate the space of equilibrium stresses with the dual space to the measuremen t set M . In particular, this implies that the dual M ∗ is the Zariski closure of S ( ρ ) as ρ ranges o v er generic frameworks. In Prop osition 2.23 we further iden tify L (Ω), for appropriate Ω, as a contact lo cus. Lemma 2.18. F or ( x, φ ) ∈ C V with x smo oth in V , we have that φ is tangent to x . (That is, the Zariski closur e in the definition of C V do es not add p oints ab ove smo oth p oints.) Similarly if x ∈ V φ with x smo oth in V , φ is tangent to x . If V is a homo gene ous variety in R n , the c onormal bund le C V always has dimension n (indep endent of the dimension of V ). If V is irr e ducible, then so ar e C V and V ∗ . Pr o of. See, e.g., [ 15 , Section 2.1.4] for the proofs of these basic prop erties in the complex case. F or the passage to the real case, let V C b e the complexification of V and let F : R n → R m b e an algebraic map that cuts out V , in the sense that V is F − 1 (0) and ker dF x = T x ( V ) at all smo oth p oin ts x ∈ V . Define (5) Γ V : = n ( x, φ ) ∈ V × ( R n ) ∗ rank φ dF x ≤ n − dim V o . F or any smo oth p oin t x ∈ V , the set of φ such that ( x, φ ) is in Γ V corresp onds exactly to the set of functionals that are tangen t to V at x . Th us C V m ust b e a union of irreducible comp onen ts of Γ V . Most of the properties in the real case follow immediately from the observ ation that (Γ V ) C = Γ V C , with the p ossible exception of irreducibility . F or irreducibility of C V , notice that from the prop erties of a complex conormal bundle, e.g., [ 15 , Section 2.1.4], w e know that C V C is an irreducible comp onen t of Γ V C but by , e.g., [ 29 , Lemma 7], the comp onen ts of (Γ V ) C corresp ond to the comp onen ts of Γ V , so in particular there is one comp onen t containing all 12 GOR TLER, HEAL Y, AND THURSTON the tangents to smo oth p oin ts. Irreducibility of V ∗ follo ws from pro jection and the fact that from their definitions V ∗ is the same as the Zariski closure of π 2 ( C V ). Prop osition 2.19. F or a homo gene ous irr e ducible algebr aic set V , the double dual V ∗∗ is V . Pr o of ide a. A short differen tial geometry argumen t sho ws that C V is the same as C V ∗ in an op en neighborho o d after p erm uting the factors. The equiv alence of the entire bundles follo ws from irreducibility . It follows that V ∗∗ = V . See [ 15 , Section 2.1.5] for more. Prop osition 2.20. F or a homo gene ous irr e ducible algebr aic set V and a smo oth p oint φ ∈ V ∗ , the c ontact lo cus V φ is flat. Pr o of ide a. W e wish to show that π 1 ( π − 1 2 ( H )) is flat for smo oth φ ∈ V ∗ . Let us instead consider π 2 ( π − 1 1 ( x )) for a smo oth x ∈ V . By definition, this consists of all functionals v anishing on T x ( V ), which is a linear space. By the symmetry prop ert y of Prop osition 2.19 , w e can apply this argumen t in the other direction to see that π 1 ( π − 1 2 ( φ )) is also a linear space. See [ 15 , Section 2.1.6] for more. Prop osition 2.20 is sometimes called Bertini’s Theorem; how ev er, there are sev eral theo- rems called Bertini’s Theorem, some of which are quite different. Note that the assumption that φ is smo oth is crucial, and at singular p oin ts, the contact lo cus may hav e different structure. F or example, consider the standard embedding in R 3 of the 2-torus (the surface of a donut sitting on a table). (In this case, since w e are dealing with a non-homogeneous set, a tangen t space is affine instead of linear.) At most p oints of the dual v ariety the con tact lo cus is the single p oin t on the torus with that specific affine tangen t h yp erplane. A single p oint is flat (in the affine sense). But for tw o exceptional hyperplanes (including the surface of the table) the contact lo cus is a circle, whic h is not flat. These t w o h yp erplanes are non-smo oth p oin ts of the dual v ariet y . W e no w turn to relating the ab ov e general construction to our setting of the measurement set M . Let M b e the Zariski closure of M . M is homogeneous since M is closed under m ultiplication b y p ositive scalars. Let C M , M ∗ , and M ω b e the conormal, dual, and con tact lo cus constructions applied to M . (Here w e think of M as a subset of R e and the equilibrium stress ω as an elemen t of ( R e ) ∗ ). W e will translate freely b et w een the stress ω and the corresp onding stress matrix Ω. Lemma 2.21. L et ρ ∈ C d (Γ) b e a fr amework so that ` ( ρ ) is smo oth in M . Then if ω ∈ ( R e ) ∗ is tangent to M at ` ( ρ ) , ω is an e quilibrium str ess for ρ . If furthermor e d` ρ has maximal r ank, then the c onverse holds: any e quilibrium str ess for ρ is tangent to M at ` ( ρ ) . Pr o of. Direct calculations sho w [ 2 , p. 183, 10 , Lemma 2.5, inter alia] that the space of equilibrium stress v ectors at a p oint ρ , when thought of as a subspace of R e , constitute the annihilator of the span of d` ρ : (6) S ( ρ ) ' ann(span( d` ρ )) . Finally , span( d` ρ ) ⊂ T ` ( ρ ) ( M ), with equality iff d` ρ has maximal rank. (It can happ en that ` ( ρ ) is smo oth even if d` ρ do es not hav e maximal rank.) Thus ann(span( d` ρ )) ⊃ ann( T ` ( ρ ) ( M )), again with equalit y if d` ρ has maximal rank. The result follows by definition of tangency . CHARA CTERIZING GENERIC GLOBAL RIGIDITY 13 In particular, b oth directions of Lemma 2.21 apply at any generic framew ork ρ . Motiv ated by Lemma 2.21 , for ω ∈ R e let B ◦ ( ω ) b e the “op en contact lo cus”: the set of smo oth p oin ts x ∈ M so that ω is tangent to M at x . Lemma 2.22. F or ρ a generic c onfigur ation and any ω ∈ S ( ρ ) , the Euclide an closur e of B ◦ ( ω ) is B (Ω) . Pr o of. By Lemma 2.21 , if ` ( σ ) ∈ B ◦ ( ω ), σ ∈ A (Ω), so B ◦ ( ω ) ⊂ B (Ω). Since B (Ω) is closed, w e ha v e one inclusion. F or the other direction, let A g (Ω) b e the p oin ts in A (Ω) which are generic in C d (Γ). The set A g (Ω) con tains ρ by hypothesis and A (Ω) is a linear space and hence smo oth. Thus b y Lemma 2.9 , A g (Ω) is dense in A (Ω). Thus ` ( A g (Ω)) is dense in ` ( A (Ω)) whic h is equal to B (Ω). Clearly B ◦ ( ω ) ⊃ ` ( A g (Ω)). Th us the Euclidean closure of B ◦ ( ω ) contains the Euclidean closure of ` ( A g (Ω)), which we just argued was B (Ω). And now we are in a p osition to pro ve the flatness of our range space B (Ω). Prop osition 2.23. F or ρ a generic c onfigur ation and ω ∈ S ( ρ ) so that ω is generic in M ∗ , the sp ac e B (Ω) is flat (i.e., L (Ω) is the same dimension as B (Ω) ). Pr o of. F rom Lemma 2.4 M is irreducible. By Prop osition 2.20 , the contact lo cus M ω is a linear space which we now identify with L (Ω). F rom Lemma 2.22 , B ◦ ( ω ) is dense in B (Ω) and thus dim B ◦ ( ω ) = dim B (Ω) ≤ dim L (Ω). Again, due to Lemma 2.22 , L (Ω) is also the smallest linear space containing B ◦ ( ω ). Since, b y definition, B ◦ ( ω ) is contained in the linear space M ω , we see that L (Ω) ⊂ M ω and dim L (Ω) ≤ dim M ω . No w consider an op en neigh b orho od U of ` ( ρ ) in M that consists of smo oth p oin ts that lie in M (such a neighborho o d must exist since ` ( ρ ) is generic). Then b y Lemma 2.18 , M ω ∩ U consists of p oints x ∈ M where ω is tangent to x , i.e., M ω ∩ U ⊂ B ◦ ( ω ). But M ω ∩ U is an op en subset of the linear space M ω , so dim M ω = dim( M ω ∩ U ) ≤ dim B ◦ ( ω ). Since dim B (Ω) ≤ dim L (Ω), dim L (Ω) ≤ dim M ω , and dim M ω ≤ dim B ◦ (Ω) all the inequalities must b e equalities, and in particular dim B (Ω) = dim L (Ω) as desired. Finally , we establish that for any generic framework ρ , w e can find an ω ∈ S ( ρ ) whic h is generic in M ∗ , so that we can apply Prop osition 2.23 . Lemma 2.24. If ρ ∈ C d (Γ) is generic, then ther e is an ω ∈ S ( ρ ) such that ( ` ( ρ ) , ω ) is generic in C M and ω is generic inside of M ∗ . Pr o of. Consider the conormal bundle C M with its tw o pro jections π 1 and π 2 to M and M ∗ . Since ` ( ρ ) is generic in M , it is smo oth in M . Th us, since C M is smooth ab o ve smo oth p oin ts of M , there is a neighborho o d N of ` ( ρ ) so that π − 1 1 ( N ) is a smo oth semi-algebraic set. Applying Lemma 2.8 to the restriction of π 1 to π − 1 1 ( N ) guarantees a p oint ( ` ( ρ ) , ω ) ∈ π − 1 1 ( ` ( ρ )) that is generic in π − 1 1 ( N ) and th us also in C M . By Lemma 2.7 , ω ∈ M ∗ is also generic. This ω is an equilibrium stress for ρ b y Lemmas 2.18 and 2.21 . 2.4. Iden tifying the contact lo cus. W e no w digress briefly to giv e a somewhat more explicit description of the space L (Ω). This is not necessary for any of our pro ofs, but may aid in understanding. 14 GOR TLER, HEAL Y, AND THURSTON Definition 2.25. F or a set S ⊂ E n and d ∈ N , let c hord d ( S ) b e the d ’th chord set of S , the union of all simplices with d vertices, all in S . F or instance, when d = 2 we add chords connecting all pairs of p oin ts in S . (F or a v ariet y V , the Zariski closure of chord 2 ( V ) is the secan t v ariety sec( V ), where we add complete lines instead of segments.) Lemma 2.26. The sp ac e B (Ω) is chord d ( ` ( K (Ω))) . Pr o of. The squared edge lengths of a framework ρ are computed b y summing the squared edge lengths of each co ordinate pro jection of ρ . Since A (Ω) is K (Ω) d , B (Ω) is the d -fold Mink o wski sum of ` ( K (Ω)) with itself. Because ` ( K (Ω)) is inv arian t under scaling b y p ositiv e reals, this Minko wski sum coincides with c hord d ( ` ( K (Ω))). Definition 2.27. F or a, b ∈ C 1 (Γ), define a “dot pro duct” h a, b i ∈ R e b y (7) h a, b i ( { w , u } ) : = ( a ( w ) − a ( u )) · ( b ( w ) − b ( u )) for eac h edge { u, w } ∈ E . Define the dot pro duct space D (Ω) to b e the linear span of h a, b i for all a, b ∈ K (Ω). Lemma 2.28. The sp ac e L (Ω) is the same as D (Ω) . Pr o of. The image ` ( K (Ω)) is contained in D (Ω), as it is just the space of all h a, a i for a ∈ K (Ω). Moreo v er, the linear span of ` ( K (Ω)) is in fact equal to D (Ω), as h a, b i = 1 2 ( h a + b, a + b i − h a, a i − h b, b i ). F rom Lemma 2.26 , the linear span of ` ( K (Ω)) is the same as the linear span of B (Ω), whic h is L (Ω) b y definition. A priori, if K (Ω) is k -dimensional, the dimension of D (Ω) could b e as big as k 2 . (There are k +1 2 dot pro ducts b et w een vectors forming a basis of K (Ω). How ev er, dot pro ducts with the vector of all ones v anish b ecause of the subtraction in the definition of h a, b i .) On the other hand, the dimension of B (Ω) is only k d − d +1 2 . When Γ has a minimal stress k ernel realized b y Ω, k = d + 1 and dim( B (Ω)) agrees with this estimate for dim( D (Ω)). The crux of Prop osition 2.23 is that in fact, ev en when Γ do es not hav e minimal stress kernel, if Ω is generic in M ∗ then B (Ω) is a flat space, and th us D (Ω) is in fact only of dimension k d − d +1 2 . This means that there m ust be some linear dep endence betw een the dot pro ducts defining D (Ω). 2.5. The map. W e now turn to our main map. Definition 2.29. Let Ω b e an equilibrium stress matrix of some framework in C d (Γ). The map ` is the restriction of ` to a map b etw een the spaces A (Ω) / Eucl( d ) and L (Ω). In this section, we show that, for any generic framework ρ and stress Ω ∈ S ( ρ ) so that Ω is generic in M ∗ , the map ` has a well-defined mo d-tw o degree which is 0, and then deduce the theorem. (Recall that the existence of such a generic Ω is guaranteed b y Lemma 2.24 .) First we recall a few standard elementary prop erties of regular v alues, prop er maps, and degrees. Because our maps are not alwa ys lo cally injective or surjectiv e, w e use a sligh tly generalized definition of regular v alue and v ersion of Sard’s theorem. Definition 2.30. Let f : X → Y b e a smo oth map b et w een smo oth manifolds X and Y . Let r be the maximal rank of the linearization d f x of f for an y x ∈ X . W e say x ∈ X is a r e gular p oint if d f x has rank r . W e say y ∈ Y is a r e gular value if every x ∈ f − 1 ( y ) is a regular p oint. Otherwise, y is called a critic al value . CHARA CTERIZING GENERIC GLOBAL RIGIDITY 15 Theorem 2.31 (Sard [ 25 ]) . L et f : X → Y b e a smo oth map b etwe en smo oth manifolds, and let r b e the maximal r ank of d f x for x ∈ X . The critic al values of f have r -dimensional me asur e 0. Prop osition 2.32. L et X and Y b e semi-algebr aic sets that ar e manifolds and f b e a p oly- nomial map with maximal r ank r , al l define d over the field k . Then the critic al values form a semi-algebr aic subset of Y , define d over k , of dimension less than r . In p articular, al l generic p oints of f ( X ) ar e r e gular values. Pr o of. See, e.g., [ 5 , Theorem 9.6.2]. Definition 2.33. A pr op er map f : X → Y b et ween top ological spaces is a con tinuous map so that the inv erse image of a compact set is compact. Examples of prop er maps include the iden tit y and any map from a compact space. F or our purp oses, we will need the following: Lemma 2.34. The length me asur ement map asso ciate d to any c onne cte d gr aph, onc e we quotient the domain by the gr oup T rans( d ) of tr anslations, is pr op er, as is its r estriction to A (Ω) for any e quilibrium str ess matrix Ω . That is, the maps ` : C d (Γ) / T rans( d ) → R e ` : A (Ω) / T rans( d ) → R e ar e b oth pr op er. Pr o of. A compact subset P ⊂ R e is b ounded, so giv es a b ound on the edge lengths. This in turn gives a b ound on how far any v ertex in Γ can b e from some fixed base vertex, so ` − 1 ( P ) is b ounded in C d (Γ) / T rans( d ) or the subspace A (Ω) / T rans( d ). Since ` − 1 ( P ) is also closed, it is compact. There is a notion of de gr e e of prop er maps b et w een manifolds of the same dimension. The follo wing theorem is standard, and is typically pro v ed using homology [ 28 , Theorem 8.12, in ter alia]. Theorem 2.35. If X and Y ar e manifolds of the same dimension, with Y c onne cte d, and f : X → Y is a pr op er map, then ther e is an element deg f in Z / 2 , invariant under pr op er isotopies of f . If X , Y , and f ar e al l smo oth, then the de gr e e is e qual to the numb er of pr eimages of any r e gular value, taken mo dulo 2. W e will w ant to compute the degree in a case when X is not quite a manifold, but rather has singularities of co dimension 2. W e use the following version. Corollary 2.36. If X is a smo oth str atifie d sp ac e with singularities of c o dimension at le ast 2 , Y is a smo oth, c onne cte d manifold of the same dimension as X , and f : X → Y is a pr op er, smo oth map, then ther e is an element deg f in Z / 2 , invariant under pr op er isotopies of f . The de gr e e is e qual to the numb er of pr eimages of any r e gular value in Y , taken mo dulo 2 . Here by a “regular v alue” w e mean a p oint in Y so that ev ery preimage is a smo oth, regular p oin t in X . The condition that the singularities hav e co dimension at least 2 is crucial; otherwise, for instance, the inclusion of the in terv al [0 , 1] in R would qualify , and the degree is obviously not in v arian t there. 16 GOR TLER, HEAL Y, AND THURSTON Pr o of. Let X sing b e the set of singular p oin ts of X . Let Y 0 = Y \ f ( X sing ), and let X 0 = f − 1 ( Y 0 ). Then X 0 and Y 0 are b oth smo oth manifolds b y construction. By Lemma 2.37 b elo w, the restriction of f to a function from X 0 to Y 0 is still prop er. The smo oth image of the stratified space X sing is itself a stratified set, with dimension no bigger: dim( f ( X sing )) < dim( X sing ). Therefore Y 0 is still connected, as w e hav e remo v ed a subset of co dimension at least 2 from Y . W e can therefore apply Theorem 2.35 to find deg f as the degree of the restriction from X 0 to Y 0 . Lemma 2.37 (Excision) . If f : X → Y is a pr op er map and Y 0 ⊂ Y is an arbitr ary subset, let X 0 = f − 1 ( Y 0 ) . Then the r estriction of f to X 0 , f 0 : X 0 → Y 0 , is pr op er. Pr o of. F or an y compact subset P of Y 0 , P is also compact as a subset of Y . Since f 0− 1 ( P ) is the same as f − 1 ( P ), it is compact. More generally , there is an in teger-v alued degree for maps b etw een oriented manifolds. Our domain space is not in general oriented, so w e only hav e a mo d-tw o degree, but that is enough for us. Applying these results to our map ` , w e see that: Lemma 2.38. Supp ose that Γ , a gr aph with d + 2 or mor e vertic es, is generic al ly lo c al ly rigid in E d and do es not have minimal str ess kernel in E d , ρ is a generic fr amework in C d (Γ) , and ω ∈ S ( ρ ) is generic in M ∗ . Then the r esulting map ` fr om A (Ω) / Eucl( d ) to L (Ω) has a mo d-two de gr e e of 0 . Pr o of. By Lemma 2.34 the map ` is prop er. (Lo cal rigidity implies that Γ is connected.) Since Γ do es not ha v e a minimal stress kernel and ρ is generic, dim( K (Ω)) > d + 1 for all Ω ∈ S ( ρ ). Th us by Prop osition 2.13 , the domain is a smo oth stratified space with singularities of co dimension 2 or greater. By Prop osition 2.23 , L (Ω) (the range of ` ) has the same dimension as B (Ω), which is the same dimension as the domain b y lo cal rigidity . So b y Corollary 2.36 it has a well defined degree mo d-tw o. Since all squared edge lengths in the image of ` are p ositiv e, an y p oin t in L (Ω) with some negativ e edge lengths has no preimage in A (Ω) / Eucl( d ) and is automatically regular. Hence the mo d-tw o degree m ust b e 0. F or Lemma 2.38 to b e useful, we must see that ` ( ρ ) is a regular v alue of ` . Lemma 2.39. Supp ose that Γ , a gr aph with d + 2 or mor e vertic es, is generic al ly lo c al ly rigid in E d , and ρ is a generic fr amework in C d (Γ) . Then ` ( ρ ) is a r e gular value of b oth ` and ` . Pr o of. Since ` ( ρ ) is a generic point of M , b y Sard’s Theorem ` ( ρ ) is a regular v alue of ` , pro ving the first part of the statement. At eac h preimage σ of a regular v alue, d` σ is of max- imal rank, and so σ is infinitesimally rigid. In particular, σ must ha ve a d -dimensional affine span, and hence cannot hav e a non-trivial stabilizer in Eucl( d ). Then b y Prop osition 2.13 ev ery p oin t in ` − 1 ( ` ( ρ )) is a smo oth p oin t in A (Ω) / Eucl( d ). Since d` σ is of maximal rank, it is injective from the tangent of C d (Γ) / Eucl( d ) to R e . The map d` σ is the restriction of d` σ from the tangen t space to C d (Γ) / Eucl( d ) to a subspace. Restriction preserv es injectivit y of the linearization of a smooth map, so ` ( ρ ) is also a regular v alue for ` . The regularity of ` ( ρ ) with resp ect to ` can also b e prov ed by using Lemma 6.2 . And now we are in p osition to complete the pro of of our main Theorem. CHARA CTERIZING GENERIC GLOBAL RIGIDITY 17 Figure 2. Generic lo cally flexible frameworks in E 2 Pr o of of The or em 1.14 . By Lemma 2.24 , for any generic ρ there is an ω ∈ S ( ρ ) that is generic in M ∗ . Cho ose the asso ciated equilibrium stress matrix Ω to define ` . F rom Lemma 2.38 , the mo d-t w o degree of ` is 0. F rom Lemma 2.39 , ` ( ρ ) is a regular v alue of ` . Th us there m ust b e an ev en num ber of p oints in ` − 1 ( ` ( ρ )). Since there is at least one p oint in the preimage, namely [ ρ ] itself, there m ust b e another p oint in A (Ω) / Eucl( d ), and th us an incongruent framew ork in C d (Γ) that has the same edge lengths as ρ . 3. Examples Here we give a few examples of ho w the v arious spaces constructed in Section 2 work out in practice. W e consider b oth cases where Theorem 1.14 applies to show that generic framew orks are not globally rigid, and cases where it do es not apply . Throughout this section, ρ is a generic framework for whic hever graph we are lo oking at and ω ∈ S ( ρ ) is c hosen to b e generic in M ∗ . (In particular, dim( K (Ω)) = k min .) 3.1. Lo cally flexible graphs. The first case we consider is that of graphs that are generi- cally lo cally flexible in E d , as in Figure 2 . The space A (Ω) con tains all affine transforms of an y flex of ρ , and possibly more. This can b e seen b y using the main argument from [ 10 ]: an y flex σ of ρ maps to ` ( ρ ) in M , which is smo oth since ρ is generic. W e therefore hav e span( d` σ ) ⊂ T ` ( ρ ) M = span( d` ρ ). In particular, an y equilibrium stress for ρ is also an equilibrium stress for σ , so σ ∈ A (Ω). A simple example of such a graph is the trip o d graph in E 2 as on the right in Figure 2 . In this case, the only equilibrium stress v ector is the zero stress, and A (Ω) contains all em b eddings of Γ. Note that in this case, L (Ω) is three dimensional, which is the same size as one would find for a generically globally rigid graph. 3.2. Not redundantly rigid. Here w e supp ose that ρ is generically lo cally rigid, but b e- comes not generically lo cally rigid when some edge { i, j } is remov ed from Γ, as sho wn for example in Figure 3 . In other w ords, w e supp ose that the graph can b e flexed, lea ving all edge lengths unchanged except for edge { i, j } , whic h is changed. These graphs are not generically globally rigid by a result of Hendrickson [ 17 ]; we will see how this works in our setting. F or a generic framew ork ρ , we can find, in the span of d` ρ , a v ector with all zeros except for the en try asso ciated with edge { i, j } (since b y definition there is a flex changing this edge length and no others). Since the equilibrium stress v ectors annihilate span( d` ρ ), w e conclude that an y equilibrium stress Ω has a zero at entry { i, j } . (In fact, a lo cally rigid generic framew ork is redundantly rigid at edge { i, j } iff it has an equilibrium stress with a non-zero entry at that edge.) 18 GOR TLER, HEAL Y, AND THURSTON Figure 3. A framew ork that is not redundantly rigid in E 2 , with graph given b y a triangular prism. F rom left to righ t, we hav e a framework ρ , the global flex guaranteed b y the theorem, and the lo cally flexible framework ρ 0 obtained b y deleting a suitable edge. Figure 4. F rom left to right, a framework ρ that is not 3-connected in E 2 (and therefore not globally rigid), its global flex, and another framework in A (Ω). Define Γ 0 to b e the graph obtained by deleting this edge, and ρ 0 to b e the resulting framew ork. Since every equilibrium stress for generic frameworks has zero es at entry { i, j } , the equilibrium stresses for Γ and Γ 0 are the same; that is, M (Γ) ∗ = M (Γ 0 ) ∗ . In particular, w e ma y think of our c hosen Ω as an equilibrium stress for ρ 0 , and it is then generic in M (Γ 0 ) ∗ . By the analysis of generically lo cally flexible frameworks in Section 3.1 , A (Ω) con tains all affine transforms of flexes of ρ 0 . In terms of ρ , we would say that A (Ω) contains all affine transforms of frameworks of Γ that ha v e the same edge lengths as ρ except on the edge { i, j } . It is also instructive to picture the relationship b etw een the measuremen t set M (Γ) in R e and the measuremen t set M (Γ 0 ) in R e − 1 . Because the framework is not redundantly rigid, M (Γ) pro jects on to M (Γ 0 ) (b y forgetting one coordinate in R e ), and the fib er ov er a generic p oin t ` ( ρ 0 ) contains an interv al. Accordingly , L (Ω) ⊂ R e for Γ is the direct sum of the corresp onding L (Ω) ⊂ R e − 1 for Γ 0 and the vector in the direction of the missing edge. 3.3. Graphs that are not ( d + 1) -connected. A graph is not ( d + 1)-connected if there is a set of at most d vertices whose remov al lea v es a disconnected graph. These graphs are not generically globally rigid in E d [ 17 ]. If the separating set has d v ertices, they span an “in terface” hyperplane whose remov al splits the graph into t w o halv es, and we can reflect one half across the in terface. If the separating set has fewer v ertices, the graph is not even generically lo cally rigid, as w e can piv ot the t wo halv es around the interface. Let Γ 0 b e one of the tw o halv es of the graph, together with the v ertices and edges in the separating set, and let ρ 0 b e the corresp onding framew ork. An y equilibrium stress Ω in S ( ρ ) induces a non-equilibrium stress on ρ 0 . The resulting forces on the vertices of Γ 0 m ust hav e no net translational and rotational effect (as is true for any stress, equilibrium or not). On the other hand, these forces are non-zero only on the d v ertices of the interface. It is then easy to see that the forces must lie entirely within the plane of the interface. CHARA CTERIZING GENERIC GLOBAL RIGIDITY 19 Figure 5. A framew ork of K 5 , 5 in 3 dimensions Therefore the forces on the interface vertices are unchanged by affinely squashing one half to w ards the interface while lea ving the other half alone. Th us A (Ω) includes frameworks where one applies tw o differen t affine transforms to the tw o halv es, with the constraint that they agree on the in terface. In particular, this includes the global flex that en tirely folds one side across the interface. 3.4. Bipartite graphs. W e next consider certain complete bipartite framew orks which (as Connelly sho w ed) satisfy Hendrickson’s conditions but are still not generically globally rigid [ 9 ]. The first example is K 5 , 5 in E 3 , as in Figure 5 , which we fo cus on first. Let the v ertices b e v 1 , . . . , v 10 so that the eac h of v 1 , . . . , v 5 is connected to eac h of v 6 , . . . , v 10 , 25 edges in all. W e ha v e that C 3 ( K 5 , 5 ) is 30-dimensional. Since this graph is generically lo cally rigid, the measuremen t set M has dimension 30 − dim(Eucl(3)) = 24 inside R 25 . W e therefore ha v e a 1-dimensional space S ( ρ ) of equilibrium stress vectors at a generic framework, which we no w identify , following Bolk er and Roth [ 6 ]. (In fact, Bolker and Roth wen t the other w a y: they used the iden tification of the space of equilibrium stresses to iden tify whic h bipartite graphs are generically lo cally rigid, including K 5 , 5 in E 3 .) W e will write v 1 , . . . , v 10 for the 10 p oints in E 3 at the generic framework ρ . The 5 p oints v 1 , . . . , v 5 in E 3 satisfy an affine relation a 1 v 1 + · · · + a 5 v 5 = 0 a 1 + · · · + a 5 = 0 (8) where not all a i are 0. Since the v i are generic, this relation is unique up to scale. Similarly there is a unique up to scale affine relation b et w een v 6 , . . . , v 10 : b 6 v 6 + · · · + b 10 v 10 = 0 b 6 + · · · + b 10 = 0 . (9) No w form vectors ~ a = ( a 1 , . . . , a 5 ) and ~ b = ( b 6 , . . . , b 10 ) and consider the blo c k matrix (10) Ω = 0 ~ a T ~ b ~ b T ~ a 0 . 20 GOR TLER, HEAL Y, AND THURSTON (That is, the ( i, j ) entry of Ω is a i b j or a j b i if either of these is defined, and 0 otherwise.) Then it follows that Ω is an equilibrium stress matrix and so spans the space S ( ρ ). In particular, since Ω visibly has rank 2, dim K (Ω) = 8. The basis vectors are (1) a v ector of 3 co ordinate pro jections of v 1 through v 5 and fiv e 0’s in the last 5 p ositions, (2) a vector of fiv e 1’s and fiv e 0’s, and (3) five 0’s in the first 5 p ositions follo wed by the 3 co ordinate pro jections of v 6 through v 10 , (4) a vector of fiv e 0’s and fiv e 1’s. The space A (Ω) is also easy to identify: it is the 24-dimensional space of configurations w 1 , . . . , w 10 , where w 1 , . . . , w 5 are an affine transform of v 1 , . . . , v 5 and w 6 , . . . , w 10 are an affine transform of v 6 , . . . , v 10 , but the tw o affine transforms need not b e the same. This guaran tees that w 1 , . . . , w 5 satisfy the affine relation given by ~ a and w 6 , . . . , w 10 satisfy the affine relation given b y ~ b , and so these configurations satisfy the equilibrium stress matrix Ω. It follo ws that L (Ω) is an 18-dimensional space. W e can think of it as the space D (Ω) as in Definition 2.27 . More generally , Bolk er and Roth show ed that a generic framework of K n,m in E d with n, m ≥ d + 2 and n + m = d +2 2 is lo cally rigid and has equilibrium stresses only of the form (11) Ω = 0 X X T 0 where X is a n × m matrix in whic h each column is an affine linear relation among v 1 , . . . , v n and eac h row is an affine linear relation among v n +1 , . . . , v n + m . In particular, the framework is redundantly rigid (since there are equilibrium stresses with non-zero entries one every edge). The rank of X is at most min( n, m ) − d − 1, the rank of Ω is t wice as large, and (12) k min = n + m − rank(Ω) = | n − m | + 2( d + 1) > d + 1 so (as Connelly stated) these graphs are not generically globally rigid. 3.5. Generically globally rigid graphs. Finally w e consider a generic framew ork ρ in E d that do es satisfy Connelly’s condition, so Theorem 1.14 do es not apply and the framework is generically globally rigid. It is instructive to see where the pro of breaks. In this case, for ev ery Ω ∈ S ( ρ ) that is generic in M ∗ , K (Ω) is only ( d + 1)-dimensional. The space A (Ω) is then just Aff ( ρ ), the space of affine transforms of ρ . Let ρ i b e the pro jection of ρ onto the i ’th co ordinate. Then by Lemma 2.28 , L (Ω) is spanned by the d +1 2 differen t v ectors h ρ i , ρ j i . These are all linearly indep enden t, since, as sho wn in [ 10 , Prop osition 4.3], whenever Connelly’s condition is satisfied, the edges of ρ do not lie on a c onic at infinity . (A conic at infinity is, in our language, a linear dep endence among the h ρ i , ρ j i .) Moreo v er, by [ 10 , Prop osition 4.2], whenev er the edges of ρ do not lie on a conic at infinity , ` is injectiv e on Aff ( ρ ) / Eucl( d ). Th us in our case, B (Ω) is homeomorphic to A (Ω) / Eucl( d ). In particular, B (Ω) has a b oundary (as it is a proper subset of L (Ω)) and so m ust A (Ω) / Eucl( d ). This boundary may b e though t of as a singularit y of co dimension 1 in the domain, and th us our degree argument do es not apply . More explicitly , ` (Aff ( ρ )) is equiv alent to a semidefinite c one , as we now explain. Let span( ` (Aff ( ρ ))) b e the linear span of the image space ` (Aff ( ρ )). Use the basis h ρ i , ρ j i to define an isomorphism φ from span( ` (Aff ( ρ ))) to the space of symmetric d × d matrices, CHARA CTERIZING GENERIC GLOBAL RIGIDITY 21 sending h ρ i , ρ j i to e ij , where e ij = ( matrix with a 1 at p osition ( i, i ) and 0’s elsewhere i = j matrix with a 1 / 2 at p ositions ( i, j ) and ( j , i ) and 0’s elsewhere i 6 = j. Lemma 3.1. F or a fr amework ρ whose e dges do not lie on a c onic at infinity and φ define d as ab ove, φ ( ` (Aff ( ρ ))) is the set of p ositive semidefinite matric es. Pr o of. Since ` is inv arian t under translation of ρ , it suffices to consider φ ( ` ( U ρ )), where U = ( u i j ) d i,j =1 is a linear map (rather than a general affine map). W e then find φ ( ` ( U ( ρ ))) = φ X j D X i u i j ρ i , X i u i j ρ i E = X j,i,i 0 u i j u i 0 j e ii 0 = U T U. (13) The d × d p ositiv e semidefinite matrices are exactly those matrices that can b e written as U T U for a d × d matrix U . In particular, when the graph has minimal stress kernel and ρ and Ω are generic, A (Ω) = Aff ( ρ ), and th us B (Ω) and A (Ω) / Eucl( d ) are isomorphic to the semidefinite cone in φ ( L (Ω)). The n um b er of preimages in A (Ω) / Eucl( d ) of a point in L (Ω) is 1 for p oints inside the positive semidefinite cone. (At non-generic p oin ts, there may b e more preimages in C d (Γ) / Eucl( d ) that are not in A (Ω)). The n um b er of preimages is 0 for p oin ts outside this cone (such as p oin ts in R e with any negative co ordinate). Th us the degree is definitely not indep endent of the generic target p oint w e consider. 4. Shared stress kernels and the rank of the Gauss map In this section we give an alternate c haracterization of global rigidit y , in terms of the shar e d str ess kernel . Definition 4.1. The shar e d str ess kernel of a framework ρ is the intersection of all stress k ernels: K ( ρ ) : = T Ω ∈ S ( ρ ) K (Ω). It is isomorphic to the space of frameworks of Γ in E 1 whic h satisfy al l the equilibrium stress matrices in S ( ρ ) (and ma yb e more). Let the shar e d str ess nul lity k sh (Γ , d ) b e dim( K ( ρ )) for a generic framework ρ . R emark 4.2 . As for k min , the shared stress nullit y k sh is indep enden t of the generic frame- w ork ρ . One wa y to see this is to note that the in tersection in the definition of k sh is ac hiev ed b y considering a sufficien tly large finite n um b er of equilibrium stress matrices Ω i ∈ S ( ρ ). The intersection of these k ernels is also the kernel of a larger matrix Ω 0 = (Ω 1 Ω 2 · · · Ω n ) obtained b y concatenating the Ω i . But Ω 0 can b e constructed by algebraic functions (as in the pro of of Lemma 5.8 ) so its rank is maximal at generic p oin ts b y Lemma 5.6 . Alternately , we can use the equiv alence with the Gauss rank in Prop osition 4.6 b elo w to sho w the same fact. R emark 4.3 . By definition, k min ≥ k sh . It frequently happ ens that k min = k sh , but it is not true in general that the analogous num bers are the same. F or instance, the matrices 0 a b a 0 0 b 0 0 22 GOR TLER, HEAL Y, AND THURSTON for a, b ∈ R all ha v e rank 2 (and so a 1-dimensional kernel); but the in tersection of their k ernels is zero. A similar example o ccurs in practice for bipartite graphs; for framew orks of K n,m in E d with n, m ≥ d + 2, n + m = d +2 2 , and n 6 = m , it follo ws from the description of the equilibrium stresses recalled in Section 3.4 that k min = | n − m | + 2( d + 1) (14) k sh = 2( d + 1) < k min . (15) The second equation follows from the fact that the only frameworks that satisfy all of the stresses of ρ m ust b e related to ρ b y an affine transform on each of the t w o sides of the bipartite graph. (F or instance, K 7 , 8 in E 4 satisfies these constraints, and has k min = 11 and k sh = 10.) Although k min and k sh are different in general, either one can b e used in a test for global rigidit y , so if k min = v − d − 1, then k sh = v − d − 1 as well: Theorem 4.4. A gr aph Γ with d + 2 or mor e vertic es is generic al ly glob al ly rigid in E d if and only if k sh (Γ , d ) = d + 1 . One direction of Theorem 4.4 is a corollary of Theorem 1.14 , as k sh ≤ k min . F or the other direction, we strengthen Connelly’s argumen t, using the same pro of. 4.1. The Gauss map and its rank. Before con tinuing w e p oint out that there is an alternate wa y of interpreting the shared stress kernel, by using the rank of maps. Definition 4.5. The r ank of an algebraic or rational map b et w een irreducible algebraic v arieties is rank of its linearization at generic p oin ts in the domain. (This is also the maximum rank of its linearization.) Equiv alently , it is the dimension of the image semi-algebraic set. Th us Theorem 1.6 sa ys that a graph is generically lo cally rigid in E d if and only if the rank of the map ` is “the largest it can b e”. No w assume that Γ is generically lo cally rigid in E d , and let t = v d − d +1 2 b e the dimension of the measurement set M . Consider no w the Gauss map , the map that tak es each smo oth p oin t of M to its tangen t space. W e consider the tangent space as a p oin t in the space of t -dimensional planes in R e , the Grassmannian Gr( t, e ), so we get a map G : M 99K Gr( t, e ). (The dashed arrow indicates that the map is a rational map: it is not defined at non-smo oth p oin ts, whic h must lie on some subset of dimension less than t ; formally , G is defined on a Zariski op en subset of M .) W e may then consider the rank of G ; in fact, this rank is closely related to k sh . Prop osition 4.6. The maps G and G ◦ ` b oth have r ank v d − k sh d . Before pro ving this prop osition, w e mak e some preliminary definitions, paralleling the earlier definitions for the minimal stress kernel. Definition 4.7. F or ρ ∈ C d (Γ), define K ( ρ ) = \ Ω ∈ S ( ρ ) k er(Ω) (16) A ( ρ ) = { σ ∈ C d (Γ) | S ( ρ ) ⊂ S ( σ ) } . (17) Note that if Ω ∈ S ( ρ ), by definition K ( ρ ) ⊂ K (Ω) and A ( ρ ) ⊂ A (Ω). W e can think of K ( ρ ) as the 1-dimensional frameworks that satisfy every stress in S ( ρ ). CHARA CTERIZING GENERIC GLOBAL RIGIDITY 23 Lemma 4.8. The sp ac e A ( ρ ) is isomorphic to K ( ρ ) d . Pr o of. By Lemma 2.11 , we ha ve (18) A ( ρ ) = \ Ω ∈ S ( ρ ) A (Ω) = \ Ω ∈ S ( ρ ) K (Ω) d = K ( ρ ) d . Pr o of of Pr op osition 4.6 . Fix a generic framew ork ρ ∈ C d (Γ). Observ e that b y Lemma 2.21 , the equilibrium stresses for ρ are the hyperplanes tangen t to ` ( ρ ). By Lemma 2.21 again, these h yp erplanes are also equilibrium stresses for any p oin t σ so that ` ( σ ) is smo oth and suc h that ` ( σ ) is in the fib er of G through ` ( ρ ). (But note that rank( d` σ ) need not b e maximal.) Thus the fib er of G ◦ ` through ρ is contained in A ( ρ ). No w define the space A ◦ ( ρ ) to b e the set of frameworks σ ∈ A ( ρ ) so that rank( d` σ ) is maximal and ` ( σ ) is a smo oth p oin t of M . Both conditions are algebraic, and ρ satisfies b oth of them, so A ◦ ( ρ ) is a non-empty Zariski op en subset of A ( ρ ). In particular, A ◦ ( ρ ) = A ( ρ ). Mean while from Lemma 2.21 all p oints in A ◦ ( ρ ) must b e in the fib er of G ◦ ` . Th us the fib er has dimension dim A ◦ ( ρ ) = dim A ( ρ ). W e therefore ha v e (19) dim A ( ρ ) = dim C d (Γ) − rank( G ◦ ` ) . Since G is defined on an op en subset of the image of ` , the image of G is the same dimension as the image of G ◦ ` and rank( G ◦ ` ) = rank G . Putting these together with Lemma 4.8 we conclude (20) rank( G ◦ ` ) = rank G = dim C d (Γ) − dim A ( ρ ) = v d − k sh d. In light of Prop osition 4.6 , since k sh ≥ d + 1, we hav e rank G ≤ v d − ( d + 1) d . Th us we can introduce the following terminology . Definition 4.9. A graph Γ has maximal Gauss r ank in E d if rank G = v d − ( d + 1) d . In particular, a graph Γ has a minimal stress k ernel iff it has maximal Gauss rank, and b y Theorems 1.13 , 1.14 , and 4.4 b oth are equiv alen t to Γ b eing generically globally rigid in E d . 4.2. Strengthening Connelly’s pro of. W e now pro ve the missing direction of Theo- rem 4.4 , mildly strengthening Connelly’s proof of Theorem 1.13 , closely following his ar- gumen t. Pr o of of The or em 4.4 . Let Γ b e a graph with d + 2 or more v ertices with k sh (Γ , d ) = d + 1. Let ρ b e a generic framework in C d (Γ), and let σ b e another framework with the same edge lengths. By [ 10 , Prop osition 3.3], there are neigh b orhoo ds U ρ and U σ of ρ and σ and a diffeomorphism g : U σ → U ρ with ` ( g ( x )) = ` ( x ) for x ∈ U σ . In particular, (21) span( d` σ ) = span( d` ρ ) . It follo ws that S ( σ ) = S ( ρ ) (since b oth are equal to ann(span( d` ρ ))). Th us σ is in A ( ρ ), whic h is K ( ρ ) d b y Lemma 4.8 . By h yp othesis, K ( ρ ) consists of the co ordinate pro jections of ρ and the vector ~ 1 of all 1’s, so σ is an affine image of ρ . (This is the analogue of [ 10 , Theorem 4.1].) As in the pro of of [ 10 , Theorem 1.3], for each v ertex v i w e can find a stress in S ( ρ ) with some non-zero stress-v alue on an edge connected to the vertex. (Otherwise we could freely mo v e v i without c hanging the space of equilibrium stresses, and get a stress kernel that is to o large. Here we use the fact that there are at least d + 2 v ertices.) Therefore each v ertex has degree at least d + 1, as the v ectors v i − v j for { i, j } ∈ E are linearly dep enden t. Then 24 GOR TLER, HEAL Y, AND THURSTON b y [ 10 , Prop osition 4.3], the edges of ρ do not lie on a conic at infinity , so by [ 10 , Prop osition 4.2] an y affine image of ρ with the same edge lengths as ρ is actually congruen t to ρ . Therefore σ is congruent to ρ , as desired. 4.3. Secan t v arieties and Zak’s theorem. W e add a few remarks ab out the algebraic geometry setting of these results. Both generic local rigidit y and global rigidity relate to the geometry of the map ` and the measurement set. In b oth cases the appropriate rigidit y prop ert y is characterized in terms of purely lo cal b ehavior of the measuremen t set. F or the generic lo cal rigidit y case, this is not surprising, but for the generic global rigidity case, it is a little un usual to b e able to characterize a global prop erty (the n umber of pre-images of a certain map) simply in terms of lo cal b ehavior (the rank of the Gauss map). Let us consider what happ ens as we v ary the dimension d while k eeping the graph fixed. F or the case d = 1, the map ` is essen tially an arbitrary quadratic map and the measurement set is of dimension v − 1 if the graph is connected. Call this measurement set M 1 , and denote b y M 1 its Zariski closure, which we call the measurement v ariet y . (F or the remainder of this section, w e are in terested in v arying the ambien t dimension while k eeping the graph fixed, so we add a subscript.) In d dimensions, the squared edge lengths are the sum of the squared edge lengths in each dimension separately . Th us the measuremen t v ariety M d in E d is the closure of the d -fold Mink owski sum of M 1 . Since M 1 is a homogeneous v ariety , the Mink o wski sum coincides with the secant v ariet y , and so (22) M d = ` ( C d (Γ)) = sec d ( M 1 ) where sec d ( M 1 ) is the d -fold secant v ariety of M 1 (i.e., the join of d copies of M 1 ). F or general homogeneous v arieties, the exp ected dimension of the join of t w o v arieties is the sum of the t w o dimensions and so the exp ected dimension of the d -fold secan t v ariet y of a v ariety V is d times the dimension of V . If the dimension of the secan t v ariet y is less than the exp ected dimension the secan t v ariet y is said to b e de gener ate . In our case, b ecause M 1 is the closure of the image of a quadratic map there is automatically some degeneracy and its secant v ariety M 2 has dimension at least one less than exp ected: dim M 2 ≤ 2 dim M 1 − 1. If our v ariety M 1 w ere s mooth or almost-smo oth, Zak’s Theorem on Sup eradditivit y [ 14 , 30 ] w ould imply that this degeneracy propagates, and given this first degeneracy , the d -fold secan t M d w ould ha v e dimension at most d · dim M 1 − d 2 . Although the conditions of Zak’s Theorem do not hold for a general graph Γ, the resulting bound is still exactly the dimension of M d giv en b y Theorem 1.6 for graphs that are generically lo cally rigid in E d . Thus generically lo cally rigid graphs are those where the secan t v ariety is minimal ly de gener ate in an appropriate sense. Generic global rigidity instead inv olv es another notion of degeneracy: the dual defe ct of a v ariet y . F or a general homogeneous v ariet y V in R n , the dual v ariety V ∗ is ( n − 1)- dimensional. (In this case the generic contact lo cus V φ is a single line through the origin.) The dual defect is defined to b e n − 1 − dim V ∗ : the difference b etw een the expected dimension of V ∗ and the actual dimension. Again, in our setting M d automatically has a dual defect of d +1 2 − 1 since it is the secant v ariety of the image of a quadratic map. Theorems 1.13 and 1.14 can b e interpreted as sa ying that the graph is generically globally rigid if and only if the dual defect is this minimum. Alternately , w e can w ork with the Gauss defe ct . F or a general homogeneous v ariety V ⊂ R n , the rank of the Gauss map G : V 99K Gr( t, n ) is dim V − 1. (In fact, this happ ens whenev er the pro jectivization P V is smo oth.) Define the Gauss defect of V to b e dim V − CHARA CTERIZING GENERIC GLOBAL RIGIDITY 25 1 − rank G . In general, the Gauss defect is less than or equal to the dual defect [ 15 , Section 2.3.4]. Again, b ecause M d is the secant v ariet y of the image of a quadratic map, the Gauss defect is at least d +1 2 − 1. By Theorem 4.4 the graph is generically globally rigid if and only if the Gauss defect is this minimum. (In particular, in this case the Gauss defect equals the dual defect.) There is muc h literature on v arieties with degenerate secant v arieties or Gauss maps, although most of the w ork fo cuses on cases which are maximally , rather than minimally , degenerate [ 16 , 22 , 31 ]. F rom this point of view, Connelly’s example [ 9 ] of K 5 , 5 (whic h is not generically globally rigid in 3 dimensions) is interesting. In this case the v ariet y M 1 is the cone on the Segre embedding of RP 4 × RP 4 in RP 9 , and Connelly’s result is ab out the degeneracy of the Gauss map of the third secan t v ariety of this Segre em b edding. 5. Complexity of the algorithm Implicit in Theorems 1.13 and 1.14 are a deterministic and a randomized algorithm. In this section, after briefly describing the deterministic algorithm (which is not very efficient), w e will prov e that testing whether a graph is generically globally rigid in E d is in RP: that is, there is a p olynomial-time randomized algorithm that will answer “no” all the time if the graph is not generically globally rigid in E d , and will answ er “yes” at least half the time if the graph is generically globally rigid in E d . Hendric kson sk etc hed an argument that testing for generic lo c al rigidit y is in RNC (which is contained in RP) [ 17 , Section 2.2.2], and later sk etc hed an randomized algorithm for determining whether a graph has a minimal stress k ernel in E d [ 18 , Section 2.3.1]. Here w e will pro vide some more details on these algorithms, wh y they work, and what the necessary b ounds on the size of the inputs are. 5.1. Deterministic algorithm. First w e sketc h the deterministic algorithm. Let t : = v d − d +1 2 b e the rank of the rigidity matrix for infinitesimally rigid frameworks, and let s : = v − d − 1 b e the maximal rank of an equilibrium stress matrix for generic globally rigid framew orks. Algorithm 5.1 (Deterministic chec k, global) . T o chec k if a graph Γ with at least d + 2 v ertices is generically globally rigid in E d , tak e a d -dimensional framework with distinct co ordinates, treated as indep enden t formal symbols, and compute its rigidity matrix, again sym b olic. By Gaussian elimination ov er the field of fractions of the co ordinates, compute the rank of this matrix and k ernel of its transp ose. (The resulting k ernel will b e a ratio of p olynomials in the symbolic inputs, and the answers will b e v alid for a numerical framework as long as none of the expressions in the denominators are zero.) If the rank of the rigidit y matrix is not t , output the answer “no”, as the graph is not ev en generically lo cally rigid. Otherwise take a generic equilibrium stress vector, i.e., a symbolic linear com bination of a basis of the k ernel of the transp osed rigidity matrix, con v ert it to an equilibrium stress matrix, and compute its rank (again sym b olically). If this rank is s , output the answer “y es”, otherwise output the answer “no”. While this algorithm is guaranteed to give the correct answer, it is likely to b e very slo w, as the num ber of terms in the p olynomials w e need to manipulate can grow rapidly . 5.2. Efficien t randomized algorithms. F or a more efficien t version, w e turn to a similar randomized algorithm. 26 GOR TLER, HEAL Y, AND THURSTON Algorithm 5.2 (Randomized c hec k, lo cal) . T o c hec k if a graph Γ with at least d +1 v ertices is generically lo cally rigid in E d , pic k a framew ork ρ in C d (Γ) with integer coordinates randomly c hosen from [1 , N ] for some suitably large N (to b e made precise b elow). Compute the rank of the rigidity matrix represen ting d` ρ . If this rank is less than t , output “no”, otherwise output “yes”. Algorithm 5.3 (Randomized c heck, global) . T o c heck if a graph Γ with at least d + 1 v ertices is generically globally rigid in E d , pro ceed as follo ws. First, if the num ber of edges, e , is less than t output “no” (as the graph cannot ev en b e generically lo cally rigid with so few edges), otherwise contin ue. Next pic k a framework ρ in C d (Γ) with in teger co ordinates randomly chosen from [1 , N ] for some suitable N . The next step is to pick one equilibrium stress v ector ω from S ( ρ ) in a suitably random w a y . Recall that an equilibrium stress v ector is a vector in the annihilator of span( d` ρ ), i.e., in the k ernel of ( d` ρ ) T . W e find ω by setting up and solving an appropriate linear system E ω = b that extends the condition that ω ∈ ker(( d` ρ ) T ). T o create the linear system, create a matrix H of e − t random ro w vectors in R e , with co ordinates in tegers chosen from [1 , N ]. App end these random rows to the transp ose of the rigidit y matrix to obtain an e + d +1 2 b y e matrix E ( ρ, H ). Compute the rank of E ( ρ, H ). If this rank is less than e , output “no”, for either the rank of the rigidit y matrix is less than t (for instance if Γ is not generically lo cally rigid), or H con tains some linear dep endence with the rest of E , otherwise contin ue. (Note that, in constructing an RP algorithm, it is safe to output “no” in unfav orable cases, as long it is not done to o often.) Define b to b e a v ector in R e + ( d +1 2 ) whic h is all zeros except for a single entry of 1 corre- sp onding to one of the rows in H . (If e = t , there will b e no such entry , b will b e all zeros and the only ω will b e the zero vector.) Now solve the linear system E ω = b , which m ust ha v e exactly one solution, denoted ω ( ρ, H ). Finally , con v ert ω ( ρ, H ) in to an equilibrium stress matrix Ω( ρ, H ), and compute its rank. If the rank is s , output the answ er “yes”, otherwise output the answer “no”. R emark 5.4 . In the randomized algorithm as describ ed ab o v e, the linear algebra computa- tions are all done with explicit in teger matrices. This can b e done exactly in polynomial time using p -adic tec hniques [ 13 ]. (That is, first solve the equations mo dulo a prime p , then lift to a solution modulo p 2 , and so forth.) Ho w ev er, since the algorithm is already randomized, the added complexity of this exact algorithm is unnecessary , and the computations can b e done more simply b y reducing mo dulo a suitably large prime p . See Prop osition 5.11 b elow for a concrete estimate of how large the primes need to b e. T o analyze the probabilit y of the algorithm giving a false negativ e output, whic h dep ends on how large the parameter N is, our main to ol is the Schwartz-Zipp el L emma [ 12 , 27 , 32 ]. Lemma 5.5 (Sc h w artz, Zipp el, DeMillo, Lipton) . L et k b e a field and P ∈ k [ x 1 , . . . , x n ] b e a non-zer o p olynomial of de gr e e d in the x i . Sele ct r 1 , . . . , r n uniformly at r andom fr om a finite subset X of k . Then the pr ob ability than P ( r 1 , . . . , r n ) is 0 is less than d/ | X | . W e also use the follo wing basic principle: Lemma 5.6. L et M ( π ) b e a matrix whose entries ar e p olynomial functions with r ational c o efficients in the variables π ∈ R n . L et r b e a r ank achieve d by some M ( π 0 ) . Then CHARA CTERIZING GENERIC GLOBAL RIGIDITY 27 rank( M ( π )) ≥ r for al l p oints π that ar e generic in R n . Mor e pr e cisely, if the entries of M ( π ) ar e p olynomials of de gr e e g , then ther e is a p olynomial P on R n of de gr e e g · r with r ational c o efficients so that P ( π ) = 0 for any π wher e the r ank of M ( π ) is less than r . Pr o of. The rank of the M ( π ) is less than r iff the determinan ts of all of the r × r submatrices v anish. Let π 0 ∈ R n b e a c hoice of parameters so M ( π 0 ) has rank r . Then there is an r × r submatrix T ( π 0 ) of M ( π 0 ) with non-zero determinan t. Thus det( T ( π )) is a non-zero p olynomial of π of degree g · r . F or an y π with rank( M ( π )) < r , this determinant m ust v anish. Th us, any such π cannot b e generic. W e can therefore take P ( π ) = det( T ( π )). W e now apply these concepts to the simpler case of lo cal rigidity for illustration. Prop osition 5.7. Algorithm 5.2 never r eturns a false “yes” answer, and r eturns a false “no” answer with pr ob ability b ounde d ab ove by t/ N . In p articular, che cking for generic lo c al rigidity is in RP. Pr o of. If the graph is not generically lo cally rigid, then from Lemma 5.6 the algorithm m ust alw a ys observ e a rank whic h is less than t . Th us it will never give a false “yes” answer. Supp ose instead that Γ is generically lo cally rigid in E d . The entries of the rigidit y matrix are linear in ρ , so from Lemma 5.6 any ρ which returns a false “no” answ er m ust b e at a zero of a p olynomial of degree t in our random v ariables. But by the Sch w artz-Zipp el Lemma, ρ is a zero with probability less than t/ N , as desired. If we choose N > 2 t , we will give a false “no” answer less than 1 / 2 the time. The algorithms for finding ranks, etc., take time p olynomial in log N (as w ell as the size of the matrix), so run in ov erall p olynomial time. The one-sided nature of the errors means that the problem is in RP (rather than, sa y , BPP). W e now return to the global case. Recall that for a non-singular n × n matrix M , (23) adj( M ) = det( M ) M − 1 , where adj M is the adjugate matrix of M , the conjugate of the cofactor matrix of M . In particular, adj M is a p olynomial in M of degree n − 1. This essen tially means that, up to a global scale, the entries of the inv erse of a matrix M are p olynomials in the entries of M . W e will apply this to the matrix E ( ρ, H ) from Algorithm 5.3 to see that the equilibrium stress matrix Ω( ρ, H ) found by the algorithm can b e though of as p olynomials in the en tries of E ( ρ, H ). As the en tries of E ( ρ, H ) are p olynomial functions in the co ordinates of the framew ork ρ and the random rows H , and matrix rank is inv arian t to scaling, this will put us in p osition to apply Lemma 5.6 . There are a few tec hnical issues that m ust b e dealt with in this analysis. Most imp ortan tly , the matrix E ( ρ, H ) has more rows than columns. W e will deal with this by lo oking at an appropriate square submatrix of E ( ρ, H ), as follows. Lemma 5.8. L et Γ b e a gr aph, and let t 0 b e the maximal value of rank d` ρ over al l fr ame- works ρ of Γ in E d . (F or generic al ly lo c al ly rigid gr aphs t 0 = t .) L et U b e the set of ρ wher e this maximal r ank is achieve d. L et s 0 b e the maximal value of rank(Ω) over al l str ess matric es of al l ρ in U . Then for al l generic ρ , we have max Ω ∈ S ( ρ ) rank(Ω) = s 0 . Mor e pr e cisely, ther e is a p olynomial P of de gr e e e + s 0 ( e − 1) in the variables ( ρ, H ) , wher e H is a set of additional r ows as in Algorithm 5.3 , so that if ( ρ, H ) is not a zer o of P then the str ess matrix Ω( ρ, H ) is wel l-define d and has r ank s 0 . 28 GOR TLER, HEAL Y, AND THURSTON Here, as in Algorithm 5.3 , for eac h ρ w e add a set H of e − t 0 additional rows in R e to the transp ose of the rigidity matrix of ρ to define a matrix E ( ρ, H ), and find an equilibrium stress vector ω ( ρ, H ) b y solving the linear system E ω = b where b ∈ R e is a vector of all zero es except for a single 1 in one of the p ositions of a ro w in H (if an y). This is then con v erted to a stress matrix Ω( ρ, H ). The assertion that Ω( ρ, H ) is w ell-defined means that this linear system has a unique solution. (In particular, this implies that ρ ∈ U .) Pr o of of L emma 5.8 . Let ρ 0 ∈ U b e a framew ork with an equilibrium stress ω 0 so that the corresp onding stress matrix Ω 0 has rank s 0 . Find a set H 0 of additional ro ws so that E ( ρ 0 , H 0 ) has rank e and E ( ρ 0 , H 0 ) ω 0 = b . Let ˆ E ( ρ, H ) b e an e × e submatrix of E ( ρ, H ) so that ˆ E ( ρ 0 , H 0 ) is in v ertible. ( ˆ E necessarily consists of t 0 ro ws from the transp ose of the rigidit y matrix and all the ro ws of H .) Define ˆ b similarly , let ˜ ω ( ρ, H ) : = adj( ˆ E ) ˆ b , and let ˜ Ω( ρ, H ) b e the asso ciated stress matrix. By Lemma 5.6 , the rank of ˆ E ( ρ, H ) is equal to its maxim um v alue e at all p oints ( ρ, H ) that are not zeros of a p olynomial P 1 ( ρ, H ) = det ˆ E ( ρ, H ), which has degree e . Moreov er, when P 1 ( ρ, H ) 6 = 0, the linear equation defining Ω has a unique solution and the adjugate matrix ˜ Ω( ρ, H ) is a scalar m ultiple of Ω( ρ, H ). In particular w e ha v e assumed ( ρ 0 , H 0 ) is not a zero of P 1 and thus ˜ Ω( ρ 0 , H 0 ) has rank s 0 . By Lemma 5.6 again, the rank of ˜ Ω( ρ, H ) is less than s 0 only at the zeros of a non-zero p olynomial P 2 ( ρ, H ) of degree s 0 ( e − 1) (as the en tries of ˜ Ω( ρ, H ) hav e degree e − 1 in ( ρ, H )). F or an y generic ρ , there m ust b e some generic p oint ( ρ, H ). At suc h a generic ( ρ, H ) ˜ Ω( ρ, H ) and Ω( ρ, H ) m ust hav e rank not less than s 0 . Meanwhile we hav e supp osed that rank of such Ω( ρ, H ) is nev er larger than s 0 , and thus hav e pro ven our claim. In particular, let P = P 1 · P 2 . Then if ( ρ, H ) is not a zero of P , the linear equation E ω = b has a unique solution (as P 1 6 = 0) and the resulting stress matrix Ω( ρ, H ) has rank s 0 (as P 2 6 = 0). R emark 5.9 . In fact, since the matrix rank drops only at the zeros of an algebraic equation, w e can pro v e the stronger statement that all generic Ω ∈ S ( ρ ) of all generic ρ hav e rank(Ω) = s 0 . Here we consider S ( ρ ) as defined o ver the smallest extension of Q containing ρ . The following theorem is a more precise version of Theorem 1.17 . Theorem 5.10. A lgorithm 5.3 never r eturns a false “yes” answer, and r eturns a false “no” answer with pr ob ability b ounde d ab ove by v e/ N . In p articular, che cking for generic glob al rigidity in E d is in RP. Pr o of. First w e supp ose that Γ is not generically globally rigid in E d . If the rigidit y matrix do es not hav e rank t , then the algorithm correctly outputs “no”. If the rigidit y matrix do es ha v e rank t , b y Lemma 5.8 , the maximal observ ed rank cannot b e larger than the rank of an y equilibrium stress matrix of any generic framework, which is less than s b y supp osition. Th us the algorithm will correctly output “no”. Next we supp ose that Γ is generically globally rigid in E d and b ound the probability of a false negative. Let ( ρ, H ) b e a set of v ariables that are not a zero of the p olynomial P given b y Lemma 5.8 . Suc h points cannot giv e a false negativ e: the rank of E ( ρ, H ) is its maximum v alue, e , so w e do not give a false negative in constructing ω , and rank(Ω) = s , so again we do not output a false negative. CHARA CTERIZING GENERIC GLOBAL RIGIDITY 29 So if Γ is generically globally rigid in E d , we are guaranteed to obtain the correct answ er if we pick ρ and H that miss the zeros of P , a p olynomial of degree e + s ( e − 1), whic h is less than v e . The Sc h w artz-Zipp el Lemma, Lemma 5.5 , then gives the b ounds stated on the error probability . Moreo v er, if we choose N > 2 v e , w e will giv e a false “no” answ er less than half the time. The running time for such an N is p olynomial in the input size, so testing for generic global rigidity is in RP . Algorithm 5.3 and the pro of of Theorem 5.10 are structured as they are b ecause Lemma 5.8 is false without the condition that rank d` ρ tak e its maximal v alue. F or instance, if a frame- w ork ρ lies in a low er-dimensional subspace of E d , the rank of a generic Ω ∈ S ( ρ ) ma y b e greater than v − d − 1, so the univ ersal upp er b ound motiv ating Definition 1.12 may not hold. 5.3. Estimating the primes. F or the reader’s con v enience, w e now estimate some b ounds on the size of the primes necessary for the algorithms to w ork with high probabilit y . These b ounds can very lik ely b e improv ed substantially . Prop osition 5.11. Supp ose that the c omputations in Algorithm 5.2 or 5.3 ar e done mo dulo a prime p then neither algorithm wil l r eturn a false “yes” answer. If the prime is chosen chosen uniformly fr om a set of primes R with e ach prime lar ger than N , and if | R | > 4 t and N > 4 t , then Algorithm 5.2 pr o duc es a false “no” answer with pr ob ability b ounde d ab ove by 1 / 2 . Similarly, if | R | > 4 v e and N > 4 v e , then A lgorithm 5.3 pr o duc es a false “no” answer with pr ob ability b ounde d ab ove by 1 / 2 . R emark 5.12 . By the Prime Num b er Theorem, this prop osition tells us w e need to consider primes up to ab out 8 t ln(4 t ) (for local rigidity) or 8 v e ln(4 v e ) (for global rigidity) in order to get a sufficiently large set R . Pr o of. Doing the computations mo dulo a prime can only make the computed ranks drop, so as b efore, we cannot return a false “yes” answ er. If the graph is generically lo cally (or globally) rigid, there is an integer p olynomial P loc (or P glob ) so that if our random framew ork ρ (or pair ( ρ, H )) is not a zero of P loc (or P glob ) we do not return a false “no” answer. The Sc h wartz-Zippel Lemma, Lemma 5.5 , works without c hange mo dulo p . The only differences are that • the prime p must b e large enough so that there are enough distinct v alues mo dulo p for the lemma to b e useful, and • the p olynomial P not b e zero mo dulo p . T o take care of the first p oin t, w e require that the prime b e larger than the c hosen v alue N in the Sch w artz-Zipp el Lemma. T o tak e care of the second point, we will give an upper bound B for the sum of the absolute v alues of the co efficien ts of P . If w e pic k a prime p larger than B (or in fact larger than the absolute v alue of any single co efficient of P ) then P will b e guaran teed to b e non-zero mo dulo p . Ho w ever, w e can in fact randomly pic k a smaller prime from a suitable collection, and still guarantee that with high probability P will b e non-zero mo dulo p . In particular, supp ose that we hav e a collection of primes R so that any pro duct of at least | R | / 4 primes in the collection is larger than B . Then, any subset of size at least | R | / 4 must ha ve some prime suc h that P is non-zero mo dulo p . (Otherwise, P would hav e to b e zero mo dulo this pro duct, but this this pro duct is larger than B .) Thus P is zero mo dulo p for at most 1 / 4 of 30 GOR TLER, HEAL Y, AND THURSTON the primes in R . Then if we pic k p at random from R , the c hance that P is zero mo dulo p is at most 1 / 4. W e now estimate the sum of the co efficients of P in the tw o cases. F or lo cal rigidity , P loc is a determinant of a t × t submatrix of the rigidity matrix. As suc h, it is a sum of t ! terms, with eac h term a pro duct of t factors, and with eac h factor ha ving co efficien t-sum equal to 2. Using the estimate n ! < n n , we therefore find (24) ln B loc ≤ ln(2 t · t !) < t (ln t + ln 2) . F or global rigidit y , we separately estimate b ounds B 1 , B 2 for the tw o factors P 1 , P 2 making up P glob from the pro of of Lemma 5.8 . W e find (25) ln B 1 ≤ ln(2 e Γ · e Γ !) < e Γ (ln e Γ + ln 2) . (Here we write e Γ for the n umber of edges in Γ to av oid confusion with the base of natural logarithms.) Note that P 2 is an s × s determinan t of ˜ Ω, which itself is made of ( e Γ − 1) × ( e Γ − 1) determinan ts of E . W e therefore hav e (26) ln B 2 ≤ ln( s !(2 e Γ e Γ !) s ) < s ln s + se Γ ln 2 + se Γ ln e Γ . No w supp ose, in the lo cal rigidity case, w e pick a set of primes R with | R | > 4 t and each prime in R larger than 4 t . Then, for any subset R 0 of R of size at least t , Q p ∈ R 0 p > B loc . Indeed, (27) X p ∈ R 0 ln p − ln B loc ≥ t ln(4 t ) − t (ln t + ln 2) = t ln 2 > 0 . Therefore if we pick a prime p randomly from R , P loc is non-zero mo dulo p with probability at least 3 / 4, and the Sch w artz-Zipp el Lemma tells us that if P loc is non-zero mo dulo p w e (correctly) answer “y es” with probability at least 3 / 4. W e conclude that our total probabilit y of returning the correct answer is at least 3 4 · 3 4 > 1 2 , as desired. Similarly , for global rigidity , we find ln B glob ≤ ln B 1 + ln B 2 ≤ ( s + 1) e Γ ln e Γ + ( s + 1) e Γ ln 2 + s ln s < v e Γ ln e Γ + v e Γ ln 2 + v ln v < v e Γ ln(4 v e Γ ) . (28) Again, supp ose w e pic k a set of primes R with | R | > 4 v e Γ and eac h prime bigger than 4 v e Γ . Then for any R 0 ⊂ R with | R 0 | > | R | / 4, we ha v e Q p ∈ R 0 p < B glob , as desired. 6. Smooth higher-dimensional flexes Let us no w turn to the issue of higher-dimensional flexing . Giv en incongruen t framew orks ρ and σ in E d with the same edge lengths, how large must a be so that ρ and σ are connected b y a smo oth path of framew orks in E d + a with constan t edge lengths? (Suc h a path is called a flex in E d + a .) Bezdek and Connelly [ 4 ] hav e shown that an arbitrary pair of frameworks in E d with the same edge lengths can b e connected by a smooth path in E 2 d (so a = d alw ays suffices), while Belk and Connelly [ 3 ] exhibited a d -dimensional framework of the “ d -simplex with flaps” which is not globally rigid in E d but still lo cally rigid all the w a y up to E 2 d − 1 (so a = d can b e necessary). Thus for arbitrary frameworks one ma y ha v e to go up to twice the dimension to get any flexibility at all. Theorem 1.18 , which we will now prov e, states that the situation is rather differen t for generic frameworks: for a generic framework ρ whic h is not globally rigid, there is some other incongruent framew ork σ so that ρ can b e flexed to σ CHARA CTERIZING GENERIC GLOBAL RIGIDITY 31 in E d +1 (so a = 1 suffices). The question of how large a must b e to reac h every alternative framew ork with the same edge lengths as a given generic one remains op en. The rest of this section is devoted to the pro of of Theorem 1.18 . Note that for the conditions of the theorem to b e satisfied Γ must hav e at least d + 2 vertices and m ust not ha v e a minimal stress kernel. Definition 6.1. Giv en a framework ρ ∈ C d (Γ), and a stress Ω ∈ S ( ρ ), the space of lifte d str ess satisfiers e A (Ω) is the space of all ( d + 1)-dimensional frameworks of Γ that satisfy Ω. Also let ˜ ρ b e the framew ork in e A (Ω) defined b y embedding ρ in the first d dimensions of E d +1 . In our pro of, our ( d + 1)-dimensional flex will in fact stay in the space e A (Ω). Because e A (Ω) is isomorphic to K (Ω) d +1 , it is a ( k d + k )-dimensional linear space, where k := dim( K (Ω)). Finally , let e ` b e the length squared map on e A (Ω) and define e B (Ω) : = e ` ( e A (Ω)). W e summarize here the main spaces and maps that will b e used in this pro of. F ( ρ, Ω) e A (Ω) e B (Ω) L (Ω) R e F ( ρ, Ω) / Eucl( d ) K (Ω) C 1 (Γ) e ` same dim ϕ Let F ( ρ, Ω) b e e ` − 1 ( ` ( ρ )), the fib er of e ` o v er the p oin t ` ( ρ ), and let F 0 ( ρ, Ω) b e the connected comp onen t con taining ˜ ρ . Thus F ( ρ, Ω) consists of p oin ts in e A (Ω) with the same edge lengths as ρ . W e will first show that for any generic ρ , and suitably generic Ω ∈ S ( ρ ), F ( ρ, Ω) is a smo oth manifold. T o do this, we will need to kno w that ` ( ρ ) is a regular v alue of e ` (Lemma 6.3 ). T o compute the dimension of F ( ρ, Ω), we will show that e B (Ω) is the same dimension as the space L (Ω), which w as defined in Definition 2.14 . By definition, ˜ ρ has all zeros in its last (( d + 1)’st) co ordinate. Th us our plan is to show that there is another incongruen t framework in F 0 ( ρ, Ω) that also has all zeros in its last co ordinate and is th us in C d (Γ). T o deal with congruences, w e will mo d out by the Euclidean transformations in the first d co ordinates. When Γ does not ha v e a minimal stress k ernel, the singularities of F 0 ( ρ, Ω) / Eucl( d ) will b e of co dimension 2 or greater (Lemma 6.6 ; compare Prop osition 2.13 ). W e then consider a prop er map ϕ from F 0 ( ρ, Ω) / Eucl( d ) that lo oks at the last co ordinate of a framework, so [ ˜ ρ ] maps to 0. W e will prov e that this map has a well defined and ev en degree. This will pro ve the existence of a second framew ork ˜ σ in F 0 ( ρ, Ω) whic h maps to zero under ϕ and th us comes from another framework σ in C d (Γ) with the same edge lengths. Since ˜ ρ and ˜ σ are b oth in F 0 ( ρ, Ω), whic h is connected b y assumption, there must b e a smo oth path within F ( ρ, Ω) whic h connects the t w o framew orks, whic h is the desired smo oth flex in E d +1 . W e now pro ceed to fill in the details. In order to understand the fibers of e ` , w e w ould lik e to apply Sard’s Theorem, but we first need to kno w that ` ( ρ ) is a generic p oint in L (Ω) in an appropriate sense. Here we use the standard notation Q ( x ), where x ∈ R n , to mean the smallest field containing Q and all the co ordinates of x . Lemma 6.2. L et ρ ∈ C d (Γ) and ω ∈ S ( ρ ) such that ( ` ( ρ ) , ω ) is generic in C M . Then ` ( ρ ) is generic inside L (Ω) , wher e we c onsider L (Ω) to b e define d over Q (Ω) . 32 GOR TLER, HEAL Y, AND THURSTON Pr o of. Supp ose that ` ( ρ ) is not generic in B (Ω) o v er Q (Ω). Then, by the definition of genericit y , there is some p olynomial function P with co efficien ts in Q so that P ( ` ( ρ ) , Ω) = 0 while there is some ρ 0 ∈ A (Ω) so that P ( ` ( ρ 0 ) , Ω) 6 = 0. W e can supp ose that d` ρ 0 has maximal rank and ` ( ρ 0 ) is smo oth in M since having non maximal rank, having an image under ` that is non smo oth in M , and the v anishing of P are all defined b y algebraic equations that do not v anish iden tically on A (Ω). Since Ω is an equilibrium stress for ρ 0 , d` ρ 0 has maximal rank, and ` ( ρ 0 ) is smo oth, from Lemma 2.21 ( ` ( ρ 0 ) , ω ) must b e in C M . Th us P is a p olynomial function that do es not v anish identically o ver C M , contradicting the genericit y of ( ` ( ρ ) , ω ) in C M . Since ` ( ρ ) is generic in B (Ω), it is also generic in its Zariski closure L (Ω). Next w e can lo ok at the map e ` and its fib ers. Let F ( ρ, Ω) : = e ` − 1 ( ` ( ρ )) b e the fib er of e ` at the p oint ` ( ρ ). Also let F 0 ( ρ, Ω) b e the comp onen t of F ( ρ, Ω) that includes ρ . Lemma 6.3. Supp ose ( ` ( ρ ) , ω ) is generic in C M . Then F ( ρ, Ω) is a smo oth manifold. Pr o of. F rom Lemma 6.2 , ` ( ρ ) is a generic p oin t in L (Ω). Thus from the algebraic v ersion of Sard’s Theorem o v er the field Q (Ω), ` ( ρ ) is a regular v alue of e ` . Therefore, from the implicit function theorem, F ( ρ, Ω) is a smo oth manifold. Lemma 6.4. Supp ose that Γ , a gr aph with d + 2 or mor e vertic es, is generic al ly lo c al ly rigid in E d and ( ` ( ρ ) , ω ) is generic in C M . Then the semi-algebr aic set e B (Ω) has the same dimension as B (Ω) and L (Ω) , namely k d − d +1 2 . Pr o of. In one direction, e B (Ω) ⊃ B (Ω) and so clearly is at least of dimension k d − d +1 2 . Recall from Prop osition 2.23 that B (Ω) is a flat space and so is contained in L (Ω), a linear space of the same dimension. In the other direction, we need to show that e B (Ω) is con tained in L (Ω). As describ ed in Lemma 2.26 , B (Ω) coincides with chord d ( ` ( K (Ω))) and similarly e B (Ω) is chord d +1 ( ` ( K (Ω))). But then e B (Ω) ⊂ chord 2 d ( ` ( K (Ω))) = chord 2 ( B (Ω)) ⊂ L (Ω), as desired. Corollary 6.5. Supp ose that Γ , a gr aph with d + 2 or mor e vertic es, is generic al ly lo c al ly rigid in E d and ( ` ( ρ ) , ω ) is generic in C M . Then F ( ρ, Ω) is a smo oth manifold of dimension k + d +1 2 . Pr o of. F ( ρ, Ω) is a smo oth manifold b y Lemma 6.3 . T o find its dimension, subtract the dimension of the image from the dimension of the domain: (29) dim( F ( ρ, Ω)) = dim e A (Ω) − dim e B (Ω) = k ( d + 1) − k d − d +1 2 = k + d +1 2 . Next w e mo d out b y the the group consisting of Euclidean transformations on the first d co ordinates. (W e do not mo d out by Euclidean transforms in v olving the last co ordinate, as w e wan t to b e able to detect when the framework lies completely in E d .) This gives us the quotien t F ( ρ, Ω) / Eucl( d ). Lemma 6.6. Supp ose that Γ , a gr aph with d + 2 or mor e vertic es, is generic al ly lo c al ly rigid in E d , ( ` ( ρ ) , Ω) is generic in C M , and k > d + 1 . Then F ( ρ, Ω) / Eucl( d ) is a smo oth str atifie d sp ac e of dimension k with singularities of c o dimension at le ast 2 . Pr o of. F rom Corollary 6.5 , F ( ρ, Ω) is a smo oth manifold. So b y the stratified structure on quotient spaces as in Lemma 2.12 , F ( ρ, Ω) / Eucl( d ) is a smo oth stratified space with CHARA CTERIZING GENERIC GLOBAL RIGIDITY 33 singularities at quotients with non-trivial stabilizer, i.e., frameworks whose pro jection down to the first d co ordinates span a prop er affine subspace of E d . First we argue that such singularities occur only at frameworks that span exactly a d - dimensional subspace of E d +1 and that pro ject down to subspace of dimension exactly d − 1 in the first d co ordinates. In particular, suc h singularities cannot ha ve an affine span of less than d in E d +1 . Any framework with a smaller affine span would give a framework in E d 0 for some d 0 < d . Considered as a framework in E d , this would mean that ` ( ρ ) is not a regular v alue of ` , con tradicting Lemma 2.39 . Th us the only p ossibilit y for a larger-than- exp ected stabilizer is a framework with d -dimensional span whose pro jection is smaller than d -dimensional, as claimed. The dimension of these singular framew orks is d + d +1 2 : it is d (the dimension of the space of h yp erplanes in E d , the p ossible choices of ( d − 1)-dimensional hyperplanes) plus d +1 2 (the dimension of Eucl( d ), the p ossible choices of the framew ork within a single h yp erplane; here w e use lo cal rigidit y in E d and the fact that ` ( ρ ) is a regular v alue of ` ). The singular framew orks are therefore co dimension k − d inside F ( ρ, Ω). Since the stabilizer of these singular frameworks is alw a ys O (1) ' Z / 2, which is discrete, the co dimension of the singular set do es not change inside the quotient. In particular, since Γ do es not hav e a minimal stress kernel, the co dimension is alwa ys at least 2. Since generically the stabilizer is trivial, the dimension of the quotien t F ( ρ, Ω) / Eucl( d ) is dim( F ( ρ, Ω)) − dim(Eucl( d )) = k . No w w e will lo ok at the last co ordinate of framew orks in F 0 ( ρ, Ω) / Eucl( d ). Since all suc h framew orks are in e A (Ω), this co ordinate must b e in K (Ω). (Here we are thinking of K (Ω) as a space of frameworks in E 1 .) Poin ts that map to 0 under this map represent classes of framew orks that lie entirely in the space spanned b y the first d co ordinates in E d +1 . Lik e all framew orks in F ( ρ, Ω), they hav e the same edge lengths as ρ . Definition 6.7. Let the map ϕ from F 0 ( ρ, Ω) / Eucl( d ) to K (Ω) b e given b y simply lo oking at the last co ordinate. Lemma 6.8. The map ϕ : F 0 ( ρ, Ω) / Eucl( d ) → K (Ω) is pr op er. Pr o of. Think of F 0 ( ρ, Ω) / Eucl( d ) as a subset of the pro duct C d (Γ) / Eucl( d ) × C 1 (Γ). It suffices to show that ϕ − 1 ( P ) is b ounded for any compact subset P of K (Ω). (It is automatic that ϕ − 1 ( P ) is closed.) Inside C d (Γ) / Eucl( d ), all of F 0 ( ρ, Ω) / Eucl( d ) is b ounded (as the edge lengths are bounded by the edge lengths of ρ ). On the other hand, since P is a bounded subset of K (Ω), the pro jection of ϕ − 1 ( P ) to C 1 (Γ), which is just P itself, is by supp osition b ounded. (Compare Lemma 2.34 .) And now we are in p osition to complete the pro of of our Theorem. Pr o of of The or em 1.18 . If Γ is not generically lo cally rigid in E d , then clearly generic frame- w orks can b e flexed in E d +1 (as they can b e flexed in E d ). So from now on w e assume Γ is generically lo cally rigid in E d . By Lemma 2.24 , for an y generic ρ , there is an ω ∈ S ( ρ ) such that ( ` ( ρ ) , ω ) is generic in C M . Cho ose this ω to define ϕ . Since Γ do es not ha ve a minimal stress kernel, k ≥ k min > d + 1. (In fact for such a generic Ω, k must equal k min ). By Lemma 6.6 , when k > d + 1 the space F 0 ( ρ, Ω) / Eucl( d ) has singularities of high co dimension. By Lemma 6.8 , ϕ is prop er, and by Lemma 6.6 again, the domain of ϕ has 34 GOR TLER, HEAL Y, AND THURSTON the same dimension as its range (which is k ). Thus ϕ has a well-defined mo d-t wo degree b y Corollary 2.36 . The frameworks in F 0 ( ρ, Ω) hav e fixed edge lengths, which implies that the image framew orks in K (Ω), considered as a subset of C 1 (Γ), hav e all p oin ts within a b ounded distance of each other. In particular ϕ is not on to, and so its mod-tw o degree m ust b e zero. The preimages of 0 are congruence classes of framew orks of Γ that lie in E d and ha v e the same edge lengths as ρ . Next, b y the analysis in Lemma 6.6 , the p oin t 0 cannot b e the image of a singularit y of F 0 ( ρ, Ω) / Eucl( d ). F urthermore, 0 is a regular v alue of ϕ : An elemen t of the k ernel of dϕ at [ σ ] for some σ in the inv erse image of 0 is an infinitesimal d -dimensional flex of the framew ork σ in C d (Γ). But Lemma 2.39 tells us that every framew ork in C d (Γ) with the same edge lengths as ρ is infinitesimally rigid. Th us there are an even num ber of p oin ts in ϕ − 1 (0). Let [ ˜ σ ] b e another such p oin t. Since ˜ ρ and ˜ σ are p oin ts in a connected smo oth manifold, there is a smo oth path connecting them. This smo oth path is the desired path of framew orks of Γ in E d +1 with constant edge lengths. References [1] L. Asimow and B. Roth, The rigidity of gr aphs , T rans. Amer. Math. So c. 245 (1978), 279–289. [2] , The rigidity of gr aphs, II , J. Math. Anal. Appl. 68 (1979), 171–190. [3] M. Belk and R. Connelly , Rigidity of the simplex with flaps , preprint, 2007. [4] K. Bezdek and R. Connelly , The Kneser-Poulsen c onje ctur e for spheric al p olytop es , Discrete Comput. Geom. 32 (2004), no. 1, 101–106. [5] J. Bo chnak, M. Coste, and M. F. Roy , R e al algebr aic ge ometry , Springer, 1998. [6] E. D. Bolker and B. Roth, When is a bip artite gr aph a rigid fr amework? , Pacific J. Math. 90 (1980), no. 1, 27–44. [7] S. ˇ Capkun, M. Hamdi, and J. P . Hubaux, GPS-fr e e p ositioning in mobile ad ho c networks , Cluster Computing 5 (2002), no. 2, 157–167. [8] M. Cheung and W. Whiteley , T r ansfer of glob al rigidity r esults among dimensions: Gr aph p owers and c oning , Preprint, York Universit y , 2005. [9] R. Connelly , On generic glob al rigidity , DIMA CS Ser. Discrete Math. Theoret. Comput. Sci. 4 (1991), 147–155. [10] , Generic glob al rigidity , Discrete Comput. Geom 33 (2005), no. 4, 549–563. [11] G. M. Cripp en and T. F. Hav el, Distanc e ge ometry and mole cular c onformation , T aunton, 1988. [12] R. DeMillo and R. Lipton, A pr ob abilistic r emark on algebr aic pr o gr am testing , Information Pro cessing Letters 7 (1978), no. 4, 192–194. [13] J. D. Dixon, Exact solution of line ar e quations using p -adic exp ansions , Numer. Math. 40 (1982), 137– 141. [14] B. F antec hi, On the sup er additivity of se c ant defe cts , Bull. So c. Math. F rance 118 (1990), no. 1, 85–100. [15] G. Fischer and J. Pion tko wski, Rule d varieties: An intr o duction to algebr aic differ ential ge ometry , Adv anced Lectures in Mathematics, F riedrick Vieweg & Sohn, Braunsch w eig, 2001. [16] W. F ulton and R. Lazarsfeld, Conne ctivity and its applic ations in algebr aic ge ometry , Algebraic Geom- etry (Chicago, Ill., 1980), Lecture Notes in Math., vol. 862, Springer, 1981, pp. 26–92. [17] B. Hendrickson, Conditions for unique gr aph r e alizations , SIAM J. Comput. 21 (1992), no. 1, 65–84. [18] , The mole cule pr oblem: Exploiting structur e in glob al optimization , SIAM J. Optim. 5 (1995), no. 4, 835–857. [19] B. Jackson and T. Jord´ an, Conne cte d rigidity matr oids and unique r e alizations of gr aphs , J. Combin. Theory Ser. B 94 (2005), no. 1, 1–29. [20] B. Jackson, T. Jord´ an, and Z. Szabadk a, Glob al ly linke d p airs of vertic es in e quivalent r e alizations of gr aphs , Discrete Comput. Geom. 35 (2006), no. 3, 493–512. [21] G. Laman, On gr aphs and rigidity of plane skeletal structur es , J. Engrg. Math. 4 (1970), no. 4, 331–340. [22] R. Lazarsfeld and A. V. de V en, T opics in the ge ometry of pr oje ctive sp ac e: R e c ent work of F. L. Zak , DMV Seminar, v ol. 4, Birkh¨ auser V erlag, Basel, 1984, With an addendum by Zak. CHARA CTERIZING GENERIC GLOBAL RIGIDITY 35 [23] L. Lov´ asz and Y. Y emini, On generic rigidity in the plane , SIAM J. Algebraic Discrete Metho ds 3 (1982), 91. [24] M. J. Pflaum, Analytic and ge ometric study of str atifie d sp ac es , Lecture notes in mathematics, vol. 1768, Springer, 2001. [25] A. Sard, Images of critic al sets , Ann. of Math. (2) 68 (1958), no. 2, 247–259. [26] J. B. Saxe, Emb e ddability of weighte d gr aphs in k -sp ac e is str ongly NP-har d , Pro c. 17th Allerton Conf. in Comm unications, Control, and Computing, 1979, pp. 480–489. [27] J. T. Sch w artz, F ast pr ob abilistic algorithms for verific ation of p olynomial identities , Journal of the A CM 27 (1980), no. 4, 701–717. [28] M. Spiv ak, A c ompr ehensive intr o duction to differ ential ge ometry , second ed., Publish or Perish, Inc., Houston, T exas, 1979. [29] H. Whitney , Elementary structur e of r e al algebr aic varieties , Ann. of Math. (2) 66 (1957), 545–556. [30] F. L. Zak, Line ar systems of hyp erplane se ctions on varieties of smal l c o dimension , F unktsional. Anal. i Prilozhen 19 (1985), no. 3, 1–10. [31] , T angents and se c ants of algebr aic varieties , T ranslations of Mathematical Monographs, v ol. 127, American Mathematical So ciety , Providence, RI, 1993, T ranslated from the Russian manuscript b y the author. [32] R. Zipp el, Pr ob abilistic algorithms for sp arse p olynomials , Symbolic and algebraic computation (EU- R OSAM ’79, In ternat. Symp os., Marseille, 1979), Lecture Notes in Comput. Sci., vol. 72, Springer, Berlin, 1979, pp. 216–226. School of Engineering and Applied Sciences, Har v ard University, Cambridge, MA 02138 E-mail addr ess : sjg@cs.harvard.edu School of Engineering and Applied Sciences, Har v ard University, Cambridge, MA 02138 E-mail addr ess : ahealy@post.harvard.edu Dep ar tment of Ma thema tics, Barnard College, Columbia University, New York, NY 10027 E-mail addr ess : dthurston@barnard.edu
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment