A joint precoding framework for wideband reconfigurable intelligent surface-aided cell-free network
Thanks to the strong ability against the inter-cell interference, cell-free network is considered as a promising technique to improve network capacity. However, further capacity improvement requires to deploy more base stations (BSs) with high cost a…
Authors: Zijian Zhang, Linglong Dai
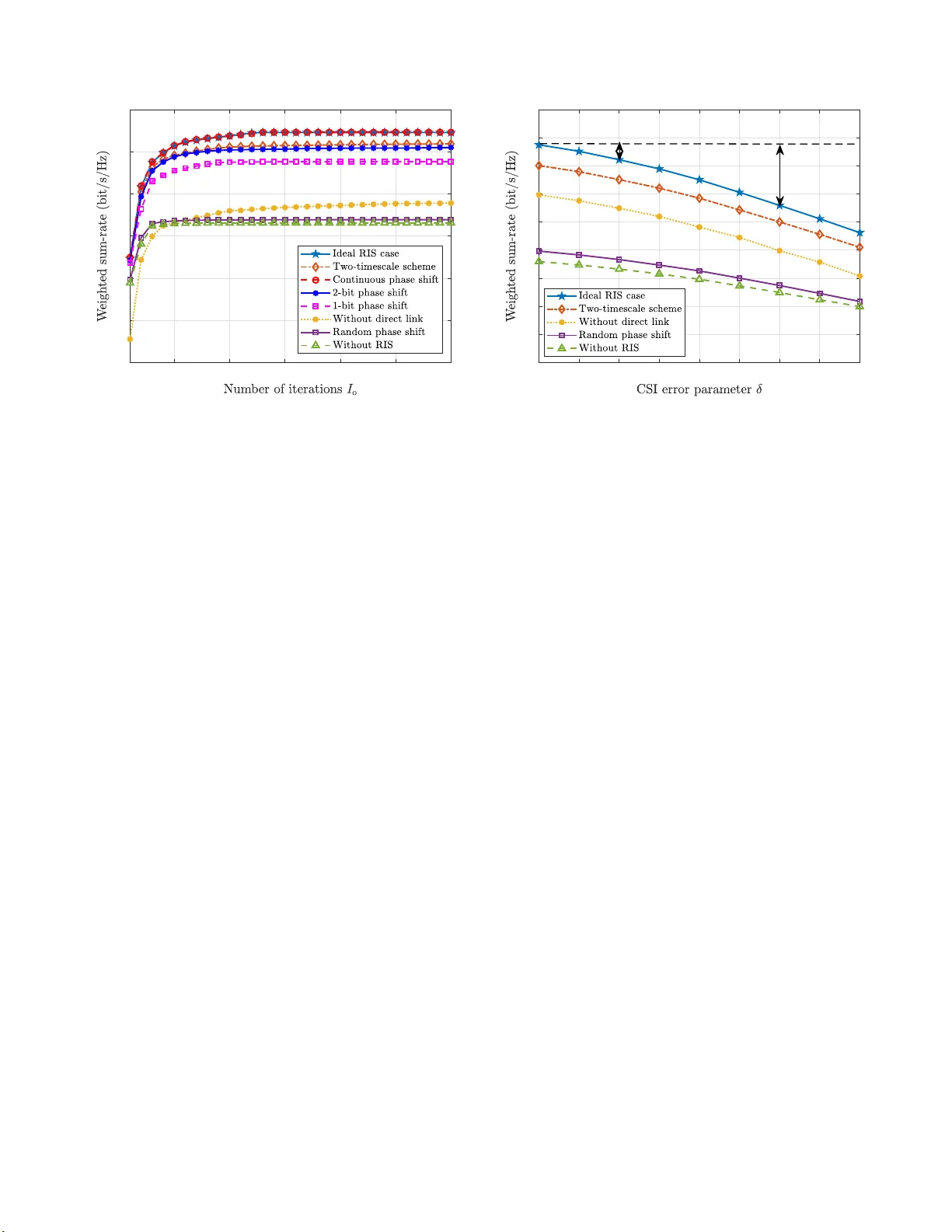
1 A Joint Precoding Frame work for W ideband Reconfigurable Intelligent Surface -Aided Cell-Fre e Netw ork Zijian Zhang and Linglong Dai Abstract —Thanks to the stro ng ability against the inter -cell interference, cell-free network is consid ered as a promising tech- nique to impr ov e network capacity . Howe ver , further ca pacity impro vement requires to deploy more b ase stations (BSs) wit h high cost and power consumption. T o address this issue, insp ired by the recently developed reconfigurable intelligent surface (RIS) technique, we propose the concept of RIS-aided cell-free network to impro ve the capacity with low cost and power consumption. The key i dea is to replace some o f t h e required BSs b y lo w-cost and energy-e fficient RISs. Then , in a wid eb and RIS-aided cell- free netwo rk, we formulate the problem of joint precoding design at BSs and RISs to maximize the network capacity . Due to the non-con vexity and h igh complexity of the form ulated p roblem, we develop an alter nating optimization framework to solve this challenging problem. In particular , we d ecouple t h is problem via fractional progra mming, and solve the subproblems alter n ativ ely . Note that most of the scenarios considered in existing works are special cases of the general scenario stud ied in th is p aper , and the propose d joint precoding framework can ser ve as a general solution to maximize the capacity in most existing RIS -aided scenarios. Fi nally , simulation results demonstrate that, compared with the con ventional cell-free network, t h e network capacity under the p roposed scheme can be improv ed sign i ficantly . Index T erms —Cell-free network, r econfigurable intelligent sur - face (RIS), wi deband, jo int pr ecoding. I . I N T R O D U C T I O N N ETWORK techniqu e is the most essential techniqu e to increase th e capacity of wireless commun ication systems [2]. Compared with 4G, the cap acity of 5G wireless network is expected to b e incr eased by 100 0 times [3]. In the currently deployed cellular networks, all users in a cell ar e main ly served by one base station (BS), thu s the users close to the cell bound ary usually suffer f rom th e se vere in ter-cell interfer ence, which is caused by the signals from adjacent cells. Ultra-dense network (UDN) ha s bee n pro posed as a pr o mis- ing technique fo r 5G to further enhance th e n etwork capacity [4]. The core idea of UDN is to increase the number of BSs and dep loy small cells [5 ] in th e cell-centric cellular network. Howe ver, as the cell d ensity increases, the inter- cell interf erence grows larger and larger . The coop eration This paper was presented in part at the IEE E SP A WC’20, Atlanta, GA, USA, May 26–29, 2020 [1]. All autho rs are with the Beijing National Researc h Center for Infor- mation Science and T echnology (BNRist) as well as the Department of Electroni c Engineering, Tsinghua Uni ve rsity , Beijing 100084, China (e-mails: zhangz j20@mails.tsin ghua.edu.cn, da ill@t singhua.edu.cn ). This work was supported in part by the National Ke y Researc h and De vel opment Program of China (Grant No. 2020YFB180720 1), in part by the National Natural Science Founda tion of China (Grant No. 62031019), and in part by the European Commission through the H2020-MSCA-ITN MET A WIRELESS Rese arch Project un der Grant 956 256. (Corr espondin g author: Linglong Dai.) theory has determined th a t [6], the upper limit of the network capacity will be bounded by the in ter-cell in ter ference as long as the cell-ce ntric network is used. In other words, inter-cell in terference becom es the bottlen eck f or the ca pacity improvement of UDN. T his prob lem is inheren t to the ce ll- centric network p aradigm, and canno t be efficiently solved [7] . T o address the issue, a novel user-centric network paradig m called cell-free network has bee n rec e ntly p roposed [7]. Unlike the classical cell- centric design princip le, the cell- free n e twork utilizes th e u ser-centric tr ansmission design, where all BSs in the network join tly serve all users co operatively without cell bound aries. Due to the efficient co operation amo ng all dis- tributed BSs [8 ] , the inter-cell interferen ce can be effectively alleviated, and thus th e network capacity can be increased accordin g ly . Th is pro mising techn iq ue has been conside r ed as a potential candid a te f or future communica tion systems [9], and h as attracted the increasing resear ch interest such a s resource allocation [1 0 ], p recoding /beamfor ming [11], ch annel estimation [12] in recent years. Howe ver, to im prove the network capacity f urther, the deployment of mor e distributed BSs requir e s high cost and power consump tion in the cell- free network . Fortunately , the emerging ne w technique called reco nfigurab le intelligent sur- face (RIS) is able to provid e an ene rgy-efficient alternative to enh a nce the network capacity . Equ ipped with a low-cost, energy-efficient and hig h-gain metasurface, RIS is bec oming a promising smart radio techn ique for fu ture 6G co mmunica- tions [1 3 ]. With a large numb er of low-cost p assi ve elements, RIS is able to reflect the elertroma g entic incident signals to a ny directions with high array gains by adjusting the ph a se shifts of its elements [1 4]. Since th e wireless e n v ironmen t can be effecti vely m anipulated with low cost and energy consum ption [15], RIS can be used to improve chann el capacity [16] , red uce transmit power [ 17], enhance transmission reliab ility [ 1 8], and enlarge wireless co verage [1 9]. A. P rio r works The existi ng research w orks about R IS include antenna design [2 0 ], physical mod el [21], chan n el estimation [22 ], joint precod in g/beamfo rming [23], and etc. Particularly , the prototy p e of RIS-based wireless co mmunicatio n has been recently de veloped in [24] to d emonstrate its functions. One key guaran tee for RIS to improve the network cap ac- ity is th e joint p recoding . Different from th e conventional precod in g at the BS only , the joint precod ing in RIS- b ased wireless systems refers to the joint design of the beamform ing vector at the BS and the p hase shifts of the RIS elemen ts. 2 Different RIS-based scenarios have been s tudied to ma x imize the capa c ity in the literatur e. Specifically , th e autho rs in [25] considered a scenario where o ne BS and o ne RIS jointly serve a single user, whic h was an early a ttem pt to realize th e capacity e nhanceme n t by using low-cost and energy- e ffi cient RIS. In [2 6], the auth o rs co nsidered a multi-user scen ario and maximized th e su m-rate o f all u sers. T o obtain the co operation gain, th e m ulti-BS scen ario was considered in [19], while the multi-RIS case was in vestigated in [1 8]. Apart fr om the cap acity maximizatio n, the design goal for joint pr ecoding can be d ifferent. Specifically , to redu ce power consump tion, some research ers have p roposed the methods to minimize the transmit power [17 ], and the authors in [15] have developed a method to maximize the energy efficiency . Some r esearchers have co nsidered th e fairn ess am o ng users, and some me thods hav e been pr o posed to maximize the minimum signal-to-in terference - plus-noise ratio ( SI NR) [23]. Furthermo re, RIS h as been comb ined with d ifferent techniq ues in the literature . For instance, the RIS-aid e d millimeter-wa ve (mmW ave ) sy stem was co nsidered in [18] and [2 7], wh e r e the authors discussed the sign al-to-noise ratio (SNR) m aximiza- tion pr oblem and the joint hybrid preco ding design, respec- ti vely . In [ 28] and [29] , the app lication of RIS in wideban d orthog onal frequency di vision m u ltiplexing (OFDM) systems was discussed to maximize the sum -rate. B. Ou r contributions T o address the challenge of cell-free network as mention ed above, in th is paper we consider to exploit RIS s to realize the improvement o f network capacity with low cost and power consump tion 1 . Specifically , th e co ntributions of this paper can be summarized as follows. • W e prop ose the concep t of RIS-aided cell-free network to furth er im prove the network capacity of the cell-f ree network with low cost a n d power consumptio n . The key idea is to replace some of the requ ired BSs in cell- free network by th e energy - efficient RISs and deploy mo re RISs in the system fo r capacity enhan cement. In the propo sed RIS-aided cell-fre e network, all BSs and RISs are simultaneously servin g all users cooperatively . T o the best o f ou r knowledge, this is th e first attemp t to introdu ce RIS in cell-free networks. • For the p roposed RIS-aided cell-free ne twork , in a typical wideband scena r io, we formu late the proble m o f joint precod in g design a t the BSs and RISs to m aximize the weighted su m -rate (WSR) of all users to improve the network capac ity . Since the c onsidered scenario is very general, i.e., mu ltiple a ntennas, multiple BSs, multiple RISs, multiple users, and multiple carrie r s, most of the considered scenarios in existing work s, such as single BS, single RIS, single user, an d single carrier, or some of them are mutiple, are all special cases of the considered scenario in this paper . • W e propo se a joint active and passiv e p recoding frame- work to solve th e form ulated pro blem. Specifically , th e 1 Simulati on codes are provided to reproduc e the results presented in this ar- ticle : http:// oa.ee.tsing hua.edu.cn/dailinglong/publications/publications.html. propo sed f ramework is an alternating o ptimization algo- rithm b ased o n th e assum p tion of fully-kn own channel state info r mation (CSI), which can gradua lly approxi- mate a f e asible solution to joint p recoding de sig n. W e first d ecouple th e active p recoding at the BSs and the passiv e prec o ding at the RISs via L agrangian dual r e- formu latio n and Multidimensiona l Comple x Quad ratic T ransform (MCQT) , and the deco upled pr oblem can b e reform u lated as two quadratically co nstrained quadr atic progr am (QCQP) subpr oblems. Then , by solvin g th e two subprob lems alternatively , the system WSR will finally conv erge to a feasible solution. • Challenged by the hig h-dimen sional chan nels introd uced by RISs, acq uiring all RIS-aide d chan nels con stantly is usually unr ealistic. T o tackle this issue, by e x ploiting the proper ty that RISs far from users have little contribution to cap acity imp rovement, the propo sed join t preco ding framework is f u rther extend e d to a more practical two- timescale schem e , which can reduce the CSI required by joint pr ecoding from th e long-ter m perspective. Specif- ically , at the beginn ing of a large timescale, each user is matched with several well-perfo rmed RISs by the propo sed linear conic r elaxation (LCR) -based m ethod. Then, in later several small timescales, o nly the RIS-aided channels of the matched user-RIS pairs are acquired and utilized for jo in t pre coding d esign, while th ose of the unmatche d pairs are tempo rarily igno red. Finally , in th e next large timescale, the abov e p rocess will b e repeated. • Simulation results demo nstrate that RISs can improve the cell-free ne twork capacity s ignificantly . In par ticular , with lim ited CSI knowledge, the two-timescale extension of the pr o posed fr a m ew ork ca n improve th e capacity efficiently with little performan ce loss . Besides, it is worth notin g that, thanks to the generality o f th e stud ied problem , the p roposed joint precodin g fr amew ork can also serve as a general solution to maxim ize the WSR in most o f th e existing RIS-aided scenarios in the literature. C. Organization and notation Or g a nization: Th e rest of the paper is organized a s follows. The system mo d el of the prop osed RIS-aided cell-free network and cor r espondin g WSR ma ximization prob lem f ormulation of joint p recoding design a r e discussed in Section II . The joint preco ding f ramew ork to solve the fo rmulated problem is pr oposed in Section III, and the two-timescale e xtension of the fr amew ork is pro p osed in Section IV. Mor e framework supplemen ts includ ing conv ergence a n d complexity analysis are g i ven in Section V. Simulation resu lts are pr ovided in Section VI to validate the perform ance of the propo sed RIS- aided cell- free network. Finally , in Section VII, co nclusions are drawn and fu ture works are d iscu ssed. Notations: C , R , and R + denote th e set of c omplex, rea l, and p ositi ve real number s, r espectiv ely; [ · ] − 1 , [ · ] ∗ , [ · ] T , an d [ · ] H denote th e inverse, conjug ate, tr anspose, and conjuga te- transpose operation s, respectively; [ · ] + denotes the negati ve truncation ope r ation, i.e., [ x ] + = max { x, 0 } ; [ v ] i is the i th element of vector v ; [ M ] i,j is the elem e n t at the i th ro w 3 2 8 W ork Report CPU CP CP U BS user Fig. 1. The proposed concept of RIS-aided cell-free network. and j th column of matrix M ; k · k denotes the Euclidean norm o f its argum ent; E {·} is the expec tatio n o perator; diag ( · ) denotes d iagonal operation ; R {·} denotes th e re a l par t of its argument; T r {·} denotes th e trace of its argument; ⊗ den otes the Kronecker prod uct; ∠ [ · ] denotes the angle of its co mplex argument; ln( · ) denotes natural lo garithm; I L is an L × L identity matrix , and 0 L is an L × L zero matrix; Finally , e l is an elementary vector with a one at the l -th p o sition, an d 1 L indicates an L -length vector with all elemen ts are 1. I I . S Y S T E M M O D E L O F T H E P RO P O S E D R I S - A I D E D C E L L - F R E E N E T W O R K T o imp rove the network capacity with low cost and p ower consump tion, in this paper we fir st propose th e co ncept of RIS-aided cell-free network. In this section, the ar c h itecture of the propo sed RIS- aided c ell-free network will be introd u ced at first. Then , we will d iscuss the transmitters, ch annels, and receivers, respectively . Finally , we will formulate the prob lem of cap acity maxim ization in a wideban d RIS-aided c ell-free network. A. S ystem ar chitecture In th is paper, we consider a wideban d RIS-aided cell-free network as shown in Fig. 1, w h ere multip le distributed BSs and RISs are dep loye d to coop erativ ely serve all users. A centr al processing unit (CPU) is deployed for contro l and plan n ing, to which all BSs are connected b y optical cables or wireless backhau l [30]. All RISs are co ntrolled by the CPU o r BSs by wired or wireless contr ol. Particularly , the consider ed network consists o f B BSs, R RISs, and K multi-ante n na users. Th e number of antennas at the b -th BS and th at at th e k -th user are M b and U k , respecti vely . The numb er of elemen ts at the r -th RIS is N r . For simplicity but with out lo ss of generality , we assume M b , U b and N r are equal to M , U and N , r e spectiv ely . Finally , the mu lti-carrier tr ansmission is con sidered an d the number of av ailab le subcarriers is P . Let N = { 1 , · · · , N } , B = { 1 , · · · , B } , R = { 1 , · · · , R } , K = { 1 , · · · , K } and P = { 1 , · · · , P } d enote the in dex sets of RIS elements, BSs, RISs, users, and subcarriers, respectiv ely . B. T ransmitters In th e pro posed RIS-aided cell-free network , all BS s ar e synchro n ized, which is n ecessary to serve all users by coherent W ork Report . . . . . . BS 1 RIS r user 1 user k . . . RIS 1 . . . BS b V I S I O മ ḷ བྷ ޘ . . , , H b k p Η , , b r p G , , H r k p F H Η Η Fig. 2. The do wnlink channel s in the wideban d RIS-aided cell-free network. joint transmission [8]. Let s p , [ s p, 1 , · · · , s p,K ] T ∈ C K , where s p,k denotes the transmitted sym bol to the k -th user on the p -th subcar r ier . W e assume that the transmitted sy mbols have norma lize d power , i.e., E s p s H p = I K , ∀ p ∈ P . In the do wnlink, the freq uency-dom ain sym b ol s p,k is firstly precod e d by the precod ing vector w b,p,k ∈ C M at the b -th BS, so the pr ecoded symbo l x b,p at the b -th BS on th e p -th subcarrier can be written as x b,p = X K k =1 w b,p,k s p,k . (1) Then, by in verse discrete Fourier transform (IDFT), the frequen cy-domain signal { x b,p } P p =1 on all P subcarr iers a t the b -th BS is conv erted to th e time do m ain. Af ter adding the cyclic prefix (CP), the signal is u p-converted to th e radio frequen cy (RF) domain via M RF chains of the b -th BS. C. Chan nels Thanks to the d ir ectional reflec tio n su p ported by R RISs as shown in Fig. 2, the channel between each BS and each user in the pro posed RIS-aided cell-fr ee network co nsists of two parts: the BS-user link and R BS-RIS-user links, whe r e each BS-RIS-user link can be f u rther divided into a BS-RIS lin k and a RIS-u ser lin k. The sign al r eflection on the RISs can be modeled b y multiplying the incident signal with a phase shift matrix and fo r warding the phase shifted signal to the user [25] . Therefo re, the equ iv alent chann el h H b,k,p ∈ C U × M from the b - th BS to the k -th user on the p - th sub carrier can be written as 2 [32] h H b,k,p = H H b,k,p | {z } BS-user link + R X r =1 F H r,k,p Θ H r G b,r,p | {z } BS-RIS-user links , (2) where H H b,k,p ∈ C U × M , G b,r,p ∈ C N × M , and F H r,k,p ∈ C U × N denote the fre q uency-do m ain c h annel on the subc a rrier p from the B S b to the user k , from the B S b to the R IS r , and from the RIS r to the user k , respectively; Θ r ∈ C N × N denotes the phase shift matrix at the RIS r , which is written as Θ r ∆ = diag ( θ r, 1 , · · · , θ r,N ) , ∀ r ∈ R , (3) 2 The signals reflected by the RISs twice and more are ignored , since they are much weak due to the large path loss of multiple hops [31]. 4 where θ r,n ∈ F . No te that F is the feasible set of the r eflection coefficient (RC) at RIS. T o study a gener a lize d model, here we assume F is th e ideal RIS case, i.e., b oth the amplitude and the ph a se of θ r,n associated with the RIS elem e n t can be controlled indepen dently and contin uously [33], i.e. , F , n θ r,n | θ r,n | ≤ 1 o , ∀ r ∈ R , ∀ n ∈ N . (4) Note that th e more pra c tical RIS reflectio n coefficients such as low-resolution d iscrete phase shifts will b e discussed in Subsection V -A later . D. Rec e ivers After passing through the eq uiv alen t chan nel h H b,k,p as s in (2), the signa ls will be received by the u sers. Th e time- domain signals received by the users are down-conv erted to the baseband at first. After th e CP r e moval and th e discrete Four ier transform (DFT), the f r equency-d o main symbo ls can be finally recovered. Let y b,k,p ∈ C U denote the baseband frequ ency- domain signal, which reach es the user k o n the subcarrier p from the BS b . Then, accordin g to the ch a nnel model ab ove, y b,k,p can be expressed by co mbining (1) and (2) as y b,k,p = h H b,k,p x b,p (5) = H H b,k,p + R X r =1 F H r,k,p Θ H r G b,r,p ! K X j =1 w b,p,j s p,j . Since there are B BSs serving K users simu ltaneously , the received sig n al at user k is the superposition o f the sign als transmitted by B BSs. Let y k,p ∈ C U denote th e receiv ed signal at the user k on the subcarrier p . Thereby , consid e r ing the ad ditiv e white Gau ssion noise ( A WGN) at the r eceiv er , we h av e th e expr ession of y k,p as sho wn in (6) a t the b ottom of this page, where z k,p , h z T k,p, 1 , · · · , z T k,p,U i T denotes the A WGN with zero mean 0 U and covariance Ξ k,p = σ 2 I U . Note that the first ter m on the righ t- hand side of (6) is the desired signal to user k , while th e second term deno tes the in ter ference from other users. As there are P subcarriers available in total, we denote the receiv ed signal at user k as { y k,p } P p =1 . E. P r oblem fomulation Based o n the system model ab ove, we consider to maximize the W SR of the pr oposed RIS-aided cell-free network subjec t to the tr ansmit power con straint at BSs and RC co nstraint RISs in this sub section. At first, the received signal y b,k,p in (6) can be simplified as y k,p ( a ) = B X b =1 K X j =1 H H b,k,p + F H k,p Θ H G b,p w b,p,j s p,j + z k,p ( b ) = B X b =1 K X j =1 h H b,k,p w b,p,j s p,j + z k,p (7) ( c ) = K X j =1 h H k,p w p,j s p,j + z k,p , where ( a ) holds by defining Θ = dia g ( Θ 1 , · · · , Θ R ) , F k,p = h F T 1 ,k,p , · · · , F T R,k,p i T , and G b,p = h G T b, 1 ,p , · · · , G T b,R,p i T , ( b ) h o lds accor d ing to (2), and ( c ) hold s by definin g h k,p = h h T 1 ,k,p , · · · , h T B ,k,p i T and w p,k = h w T 1 ,p,k , · · · , w T B ,p,k i T . Then, the SINR for the transmitted symbol s p,k at th e user k on the subcarrier p can be easily calculated as γ k,p (8) = w H p,k h k,p K X j =1 ,j 6 = k h H k,p w p,j h H k,p w p,j H + Ξ k,p − 1 h H k,p w p,k . Thereby , the WSR R sum of all K users is giv en by R sum = K X k =1 P X p =1 η k log 2 (1 + γ k,p ) , (9) where η k ∈ R + represents the weight of the user k and R k,p denotes the rate of user k on subcarr ier p . Finally , th e WSR maximizatio n op timization pr oblem can be originally formulated as P o : max Θ , W R sum ( Θ , W )= K X k =1 P X p =1 η k log 2 (1 + γ k,p ) (10a) s . t . C 1 : K X k =1 P X p =1 k w b,p,k k 2 ≤ P b, max , ∀ b ∈ B , (1 0b) C 2 : θ r,n ∈ F , ∀ r ∈ R , ∀ n ∈ N , (10c) where P b, max denotes th e max imum transmit power o f th e BS b and we have defined W as fo llows fo r expression simp licity: W = w T 1 , 1 , w T 1 , 2 , · · · , w T 1 ,K , w T 2 , 1 , w T 2 , 2 , · · · , w T P,K T . (11) Due to the non -conv ex complex ob jectiv e func tio n (10 a), the joint optimization of the phase shift matr ix Θ and the precod in g vector W is very challenging . Fortunately , insp ir ed by the frac tional pro grammin g (FP) methods, we pr opose a joint pr ecoding framework to find a fea sib le solution to th e problem P o in the following Section I II. I I I . P RO P O S E D J O I N T P R E C O D I N G F R A M E W O R K In this section, we present th e proposed jo int p r ecoding framework to solve the WSR o ptimization problem P o in (10). Spec ifically , the sectio n is summar ize d as follows. A n y k,p = B X b =1 y b,k,p + z k,p = B X b =1 K X j =1 H H b,k,p + R X r =1 F H r,k,p Θ H r G b,r,p ! w b,p,j s p,j + z k,p = B X b =1 H H b,k,p + R X r =1 F H r,k,p Θ H r G b,r,p ! w b,p,k s p,k | {z } Desired signal to user k + B X b =1 K X j =1 ,j 6 = k H H b,k,p + R X r =1 F H r,k,p Θ H r G b,r,p ! w b,p,j s p,j | {z } Interference from other users + z k,p . (6) 5 … Joint precoding with full CSI knowledge Acquire full CSI of the whole network T ime Small timescale Fig. 3. The dynamical working process of the proposed joint precoding frame work ov er time. overview of the pro posed framework is first provid e d in Subsection II I-A, where the p roblem P o in (1 0) is divided into three subpro blems. Then, the detailed algo r ithms to solve these three subproblems are g i ven in Subsections I II-B, III-C, and III-D, respectiv ely . A. Ove rview of the pr opo sed jo int pr ec o ding fr a m ework As the basis of the joint precoding design, we ass ume that the CSI of the whole RIS-aided cell-fr e e network can be fully acquired by the CPU in advance. Then, based on the fully- known CSI, the joint pre coding at the BSs and RISs are fur ther designed and employed . Intuitively , we draw Fig. 3 to show this dyn amical proc ess over time. Under the assumption of fully-kn own CSI in each small tim e scale, we focus on so lving the prob lem P o in ( 10) to find a feasible preco d ing design W opt and Θ opt for each small timescale as follows . At fir st, to deal with the complexity of sum -logarithm s in th e WSR maxim ization prob lem P o in ( 10), by utilizing Lagrang ian dual reformulation (LDR), a method has been propo sed in [3 4] to deco uple the logarithms. Based on th is, we have the following Pr op o sition 1 . Proposition 1: By in troducing an auxiliary variable ρ ∈ R P K with ρ = [ ρ 1 , 1 , ρ 1 , 2 , · · · , ρ 1 ,K , ρ 2 , 1 , ρ 2 , 2 , · · · , ρ P,K ] T , the original problem P o in (10) is equi valent to ¯ P : max Θ , W , ρ f ( Θ , W , ρ ) s . t . C 1 : K X k =1 P X p =1 k w b,p,k k 2 ≤ P b, max , ∀ b ∈ B , (12) C 2 : θ r,n ∈ F , ∀ r ∈ R , ∀ n ∈ N , where the ne w objective function f ( Θ , W , ρ ) is f ( Θ , W , ρ ) = K X k =1 P X p =1 η k ln (1 + ρ k,p ) − K X k =1 P X p =1 η k ρ k,p + K X k =1 P X p =1 η k (1 + ρ k,p ) f k,p ( Θ , W ) , (13) wherein the function f k,p ( Θ , W ) is denoted by f k,p ( Θ , W ) = (14) w H p,k h k,p K X j =1 h H k,p w p,j h H k,p w p,j H + Ξ k,p − 1 h H k,p w p,k . Then, we propose the joint acti ve and passive precodin g framework to optimize the variables ρ , W , and Θ in (12) iterativ ely . After introducin g two auxiliary variables ξ and , the propo sed joint precoding framework to maximize the Algorithm 1 Prop o sed Joint Precoding Frame work . Input: All channels H b,k,p , G b,r,p and F r,k,p where ∀ b ∈ B , k ∈ K , p ∈ P . Output: Optimized active precod ing vecto r W ; Optimized passiv e precoding matrix Θ ; W eig h ted sum-rate R sum . 1: In itialize W and Θ ; 2: while no convergence o f R sum do 3: Upd ate ρ by (15); 4: Upd ate ξ by (19 ); 5: Upd ate W by solving (24); 6: Upd ate by (2 9 ); 7: Upd ate Θ by so lving (35); 8: end while 9: return W opt , Θ opt , and R sum . WSR is summariz e d in Alg orithm 1 . In this fr a mew ork, the variables ρ , ξ , W , , and Θ ar e altern ately upd ated un til the conv ergence of the objective function is achiev ed. The op timal solution s to these variables at each step will be introdu c ed in the following three subsections. Specifically , the solution to ρ opt is firstly pre sen t in Su bsection III-B. Then, the solu tio ns to ξ opt and W opt for the active precodin g d esign are provide d in Sub section III-C. After that, the solutio ns to opt and Θ opt for the passiv e precodin g design are finally discussed in Subsection III-D. B. Fix ( Θ , W ) a nd solve ρ opt Giv en fixed ( Θ ⋆ , W ⋆ ) , the optimal ρ in (13) can be obtained by solv ing ∂ f /∂ ρ k,p = 0 for ∀ k ∈ K , ∀ p ∈ P . The solution can be written as ρ opt k,p = γ ⋆ k,p , ∀ k ∈ K , ∀ p ∈ P . (15) By substituting ρ opt k,p in (15) b a c k into f in (13), o ne can notice that, only the la st term in ( 13) is associated with th e variables W and Θ . Hence, the pr oblem ¯ P in (1 2) can be further solved as shown in the following tw o subsections. C. Active precoding: fi x ( Θ , ρ ) and solve W opt In the case of given ( Θ ⋆ , ρ ⋆ ) , the equiv a lent WSR max - imization pro blem ¯ P in (12) can be reformu lated as the following su b problem P active for the activ e precoding design at BSs: P active : max W g 1 ( W ) = K X k =1 P X p =1 µ k,p f k,p ( Θ ⋆ , W ) s . t . C 1 : K X k =1 P X p =1 k w b,p,k k 2 ≤ P b, max , ∀ b ∈ B , (16) where µ k,p = η k (1 + ρ ⋆ k,p ) holds. Howev er , note that the reform u lated sub problem P active in ( 16) is still too difficult to solve due to the h ig h-dimen sional non-conve x f k,p in (14). Specifically , d ue to the c hannels intro d uced by the RIS-aided cell-free network, this sub problem is actually a special high-dim ensional sum-of-f ractions problem. Different from the familiar scalar-form fractio ns, the hig h-dimen sional “fractions” in ( 14) ar e the p roducts of matrice s and inv erse 6 matrices. Thereby , the n on-conve xity of f k,p in (14) cannot be simply r elaxed by adopting the com mon FP meth ods such as the Dinkelbach’ s algorithms [35]. T o tackle this issue, we for tunately n otice a re c e ntly propo sed m ethod called multidimensiona l co mp lex q uadratic transform (MCQT) [34 ]. Different from the commo n FP methods, MCQT extends th e c ommon scalar-form fractiona l progr amming to matrix-for m and can be utilized to addre ss the non -conv exity of the h igh-dimen sional “fractio n s” [34 ]. Since f k,p in (16 ) just meets the concave- conve x cond itio ns required by MCQT , we can ap ply MCQT to reformu late the subprob lem ( 16) to address its non-conv exity . In this way , we obtain Pr opo sition 2 as b elow . Proposition 2: Exploiting the fractional pr ogrammin g method MCQT and by in troducin g auxiliary variables ξ p,k ∈ C U with ξ = [ ξ 1 , 1 , ξ 1 , 2 , · · · , ξ 1 ,K , ξ 2 , 1 , ξ 2 , 2 , · · · , ξ P,K ] , the subprob lem P active in (16) can be further reformulated as ¯ P active : max W , ξ g 2 ( W , ξ ) s . t . C 1 : K X k =1 P X p =1 k w b,p,k k 2 ≤ P b, max , ∀ b ∈ B , (17) where g 2 ( W , ξ ) = K X k =1 P X p =1 2 √ µ k,p R ξ H k,p h H k,p w p,k (18) − K X k =1 P X p =1 ξ H k,p K X j =1 h H k,p w p,j h H k,p w p,j H + Ξ k,p ξ k,p . Thereby , the updating of W can be divided in to two steps of u pdating ξ and W in tu rn. T o ac hiev e this, the reform u lated subp roblem ¯ P active in (1 7) can b e divided into two subproblem s and solv ed respectiv ely as f ollows. 1) F ix W and solve ξ opt : While fixing W in ¯ P active in (17), by setting ∂ g 2 /∂ ξ k,p to zero, the optimal ξ can b e obtained by ξ opt k,p = √ µ k,p K X j =1 h H k,p w p,j h H k,p w p,j H + Ξ k,p − 1 h H k,p w p,k , ∀ k ∈ K , ∀ p ∈ P . (19) 2) F ix ξ and solve W opt : Wh ile fixin g ξ in ¯ P active in (17), for simplification and clarity of (17), we can first defin e a p = X K k =1 h k,p ξ k,p ξ H k,p h H k,p , (20a) A p = I K ⊗ a p , v k,p = h k,p ξ k,p . (20b) Then, by substituting (20) into g 2 in ( 18), we ca n rewritten g 2 as g 2 ( W ) = − W H A W + R 2 V H W − Y , (21) where A = diag ( A 1 , · · · , A P ) , Y = K X k =1 P X p =1 ξ H k,p Ξ k,p ξ k,p , (22 a) V = [ v T 1 , 1 , v T 1 , 2 , · · · , v T 1 ,K , v T 2 , 1 , v T 2 , 2 , · · · , v T P,K ] T . (22b) Therefo re, the active precodin g prob le m ¯ P active in (17 ) can be further simplified as ˆ P active : min W g 3 ( W ) = W H A W − R 2 V H W s . t . C 1 : W H D b W ≤ P b, max , ∀ b ∈ B , (24) where D b = I P K ⊗ e b e H b ⊗ I M with e b ∈ R B . Since the matr ic e s A and D b ( ∀ b ∈ B ) are all positive semidefinite, the simplified su b problem ˆ P active in (24) is a standard QCQP problem , w h ich ca n be op tim ally solved by many existing methods such as alternating dir e c tion meth o d of m ultipliers (ADMM) [36]. Howe ver, note tha t the adop tion of ADMM in Q CQP problem requir es the in version fo r the matrix A (along with Lagrang e multiplier s). Due to the high-d imensional chann e ls of cell-free network, the dimension of A is usually very high ( B M P K ). As a result, the in version f or A h as a high computatio nal complexity of abou t O B 3 M 3 P 3 K 3 , which may p rev ent the pr ecoding design fr om pr actical application. T o avoid the matrix in version operation th us red u cing the complexity , h ere we provide an inversion-free feasible solution by exploiting the primal-dual su b gradient (PDS) metho d [37] to obtain W opt in Append ix A. D. P a ssive pr eco ding: fix ( ρ , W ) and solve Θ opt Based on the given ( ρ ⋆ , W ⋆ ) , for the equi valent WSR maximization pro blem ¯ P in (12), the subpro blem of the RIS precod in g design at RISs can be equiv alently rewritten as P passive : max Θ g 4 ( Θ ) = K X k =1 P X p =1 µ k,p f k,p ( Θ , W ⋆ ) s . t . C 2 : θ r,n ∈ F , ∀ r ∈ R , ∀ n ∈ N , (25) where µ k,p = η k (1 + ρ ⋆ k,p ) . Similarly , to r e duce the comp lexity , we wish to simplify the expression of g 4 in (25) . Firstly , by defining a new auxiliar y f unction with respect to Θ as Q k,p,j ( Θ ) = B X b =1 H H b,k,p + F H k,p Θ H G b,p w b,p,j , (26) we can r e write g 4 in (25) a s (23) at the b ottom o f ne xt page. Howev er , th is subpr oblem is still har d to so lve due to the mutidimen sional fractions in f k,p in (14). Notice th at the subprob lem (25) satisfi es the concave-conve x cond itions [34 ], again we exploit th e MCQT to address this issue ag ain by using the following Pr o position 3 . Proposition 3: W ith the fractional p rogramm ing metho d MCQT , by introducing an aux iliar y variable p,k ∈ C U and = [ 1 , 1 , 1 , 2 , · · · , 1 ,K , 2 , 1 , 2 , 2 , · · · , P,K ] , the passi ve p recoding subproblem P passive in (25) can be reform u lated as ¯ P passive : max Θ g 5 ( Θ , ) = K X k =1 P X p =1 g k,p ( Θ , ) (27a) s . t . C 2 : θ r,n ∈ F , ∀ r ∈ R , ∀ n ∈ N , ( 27b) where g k,p ( Θ , ) = 2 √ µ k,p R H k,p Q k,p,k ( Θ ) − H k,p K X j =1 Q k,p,j ( Θ ) Q H k,p,j ( Θ ) + Ξ k,p k,p . (28) Next, similar to the pre vious processing of solving the subprob lem ¯ P active in (17 ), we consider to op tim ize two vari- 7 ables and Θ in (27) in turn. The reformu lated subproblem ¯ P passive in (27 ) can be further divided into two subp roblems and respectively solved as follows . 1) F ix Θ and solve opt : For given fixed Θ in ¯ P passive in (27), by solvin g ∂ g 5 /∂ k,p = 0 for ∀ k ∈ K and ∀ p ∈ P , we can obtain the optimal k,p for all k ∈ K an d p ∈ P by opt k,p = (29) √ µ k,p K X j =1 Q k,p,j ( Θ ) Q H k,p,j ( Θ ) + Ξ k,p − 1 Q k,p,k ( Θ ) . 2) F ix and solve Θ opt : While fix ing in g 5 in (27), due to the co mplexity of ¯ P passive in ( 27), we first consider to simplify th e expression of g 5 by using the new au xiliary function Q k,p,j ( Θ ) with respect to Θ in (26) as follows: H k,p Q k,p,j ( Θ ) ( a ) = B X b =1 H k,p H H b,k,p w b,p,j + H k,p F H k,p Θ H G b,p w b,p,j ( b ) = B X b =1 H k,p H H b,k,p w b,p,j + θ H B X b =1 diag H k,p F H k,p G b,p w b,p,j ( c ) = c k,p,j + θ H g k,p,j , (30) where ( a ) holds accord in g to (23 ), ( b ) is ob tained by defining θ = Θ1 RN , and ( c ) is achiev ed by defining c k,p,j = X B b =1 H k,p H H b,k,p w b,p,j , (31a) g k,p,j = X B b =1 diag H k,p F H k,p G b,p w b,p,j . (31b) By substituting (30) into (28), we obtain: g k,p ( Θ ) = 2 √ µ k,p R c k,p,k + θ H g k,p,k (32) − K X j =1 c k,p,j + θ H g k,p,j c ∗ k,p,j + g H k,p,j θ − H k,p Ξ k,p k,p . Then, we can furth er substitute (3 2) into ( 2 7a), so that g 5 in (27a) can be simplified as g 5 ( Θ ) = − θ H Λ θ + R 2 θ H ν − ζ , (33) where Λ = K X k =1 P X p =1 K X j =1 g k,p,j g H k,p,j , (34a) ν = K X k =1 P X p =1 √ µ k,p g k,p,k − K X k =1 P X p =1 K X j =1 c ∗ k,p,j g k,p,j , (34b) ζ = K X k =1 P X p =1 K X j =1 | c k,p,j | 2 + K X k =1 P X p =1 H k,p Ξ k,p k,p (34c) − 2 K X k =1 P X p =1 √ µ k,p R { c k,p,k } . Therefo re, the reformu lated passi ve pre coding sub problem ¯ P passive in (27) can be further s implified as ˆ P passive : min Θ g 6 ( Θ ) = θ H Λ θ − R 2 θ H ν s . t . C 2 : θ r,n ∈ F , ∀ r ∈ R , ∀ n ∈ N . (35) This simplified subpro blem ˆ P passive is similar to those in [ 19], [38]. Since the matrix Λ is positive semide fin ite, the objective function is c o n vex. Besides, since we h av e F , { θ r,j | θ r,j | ≤ 1 } acco rding to (4) , the co nstraint C 2 is also co n vex. Thereb y , this subprob lem ˆ P passive can be solved b y ADMM [36]. Howe ver, similar to the optimization of acti ve p recoding vector W , note that the adoption of ADMM [36] in this QCQP pr oblem req u ires the matrix inversion for Λ with high c omputation al complexity of O R 3 N 3 . Sin ce the RIS element n umber N is u sually very large, the comp lexity o f using ADMM is very h igh. Again, to reduce th e comp lexity , here we also provide a po tential metho d based o n the PDS to obtain the optimal solution Θ opt , which will be detailedly introdu c ed in App endix B . I V . T W O - T I M E S C A L E E X T E N S I O N O F T H E P RO P O S E D J O I N T P R E C O D I N G F R A M E W O R K Up to no w , we h ave provided a jo int precod ing frame- work fo r the proposed RIS-aided cell-f ree network under the assump tion of f u lly-known CS I in every small timescale, as shown in Fig. 3. Howe ver, due to the inheren t high - dimensiona l channels introdu c ed by RISs, acq uiring all RIS- aided channels so freque ntly is usually unrealistic [ 22]. I n particular, this issue is gr eatly exacerbated by the high-d ensity of users, BSs, and RISs in RIS-a ided cell-free networks, wh ich prevents many existing joint precoding schemes based on fully-kn own CSI fro m practical adopting. T o tackle this issue, in th is section, the proposed joint precod in g framework is fu rther extended to a mo re practical two-timescale scheme, which can serve a s a trade-off scheme between o verhead and p erforma n ce. The key idea is to ma tc h each u ser with several well-perf ormed RISs at th e beginn ing of a large tim escale. Th e n, in later several small timescales, only the RIS-aided ch annels o f the matched user-RIS pairs are acquired and utilized fo r joint preco d ing design, while th ose of the unmatched pairs are tempo rarily ig n ored to relieve the pressure of RIS channel acquisitions. Specifically , this section is summarized as follows. Firstly , in Subsectio n IV -A , th e two-timescale extension of the pro- posed fram ew o rk is ov erviewed. T hen, the user-RIS matchin g problem is formu lated in Subsection IV -B. Finally , a LCR- based method is pro posed to solve this pro blem in Subsection IV -C. A. Ove rview of the pr opo sed two- timescale e xten sion In this subsection, the two-timescale extension o f th e pro- posed joint p r ecoding fram e work is p roposed as a more g 4 ( Θ ) = K X k =1 P X p =1 √ µ k,p Q H k,p,k ( Θ ) K X j =1 Q k,p,j ( Θ ) Q H k,p,k ( Θ ) + Ξ k,p − 1 Q k,p,k ( Θ ) . (23) 8 … Lar ge timescale Small timescale Joint precoding with partial CSI knowledge User-RIS matching Acquire full CSI of the whole network Acquire partial CSI based on the matching results T ime … Fig. 4. The dynamica l working process of the two-ti mescale ext ension of the proposed joint precoding frame work. practical scheme to ad dress th e cha llen ge of high -dimension a l channels introdu ced by RISs in cell-free networks. Intuitively , we present how th is two-timescale scheme works in Fig. 4, wh ic h illustrates its dynamical working pr ocess over tim e in a large timescale. Particularly , the proposed two- timescale scheme exploits the p roperties th at RISs far fro m users have little co ntribution to sy stem capacity an d th e user’ s mobile scop e is limited in a large timescale, th us the RISs far fr om user s can be ignored temp o rarily . Specifically , at th e beginning o f a large timescale, all BS-RIS-u ser ch annels are fully acquired once. Then, under the principle o f m a tc h ing relativ ely strong user-RIS pairs, each user is matched with se veral well-perfor med RISs. Subsequen tly , in the next several small tim e scales, on ly the RIS-aided chann els of th e m atched user-RIS pairs and the d irect-link ch annels ar e acqu ired and utilized for pr ecoding d esign while th o se u nmatched are ignored . Finally , the above proc e ss will be rep eated in the next large timescale. W ith this two-time scale scheme, only the limited CSI is acquired and u tilized in small timescales, and it is un necessary to acquire all RIS-aided channels so freque ntly as b efore. As the cost o f the in complete CSI, the two-tim e scale scheme will lead to per formance loss, wh ile we will show this lo ss is actually very limited in later Section VI. Conseq uently , compare d with the or iginal scheme in Fig. 3, the two-timescale scheme in Fig. 4 is m ore practical to b e applied , especially fo r the networks with a lar ge number of distrib u ted RISs. B. User-RIS matching: Pr o blem formulation T o determ ine which RIS-aided chann els should be acquired and utilized in small timescales as shown in Fig. 4, in this subsection, the user-RIS match ing problem is formulated. Firstly , let u k,r ∈ { 0 , 1 } denote th e indicato r variable that ind icates wheth er the user k and the RIS r is match ed. Particularly , u k,r being one/zero means that the channels between user k and RIS r will/won’t be acqu ired and utilized in later small timescales. T o simplify the expr ession, we define u k = [ u k, 1 , · · · , u k,R ] T and u = u T 1 , · · · , u T K T . T o determine which user-RIS pairs should be matched, we define the following virtu al sum-rate ˆ R sum as the bon us fu nction 3 of 3 This bonus function is chosen for the expected result that, by m aximizi ng ˆ R sum , the user-RIS pairs with stronger links are more preferred to be matched, while those unmatched pairs hav e relati vel y littl e contrib ution to capacit y improv ement so that the y can be temporarily ignored in later small timescale s to relie ve the pressure of RIS channel acquisitions. Algorithm 2 Prop o sed user -RIS matching method. Input: All channels H b,k,p , G b,r,p and F r,k,p where ∀ b ∈ B , k ∈ K , p ∈ P . Output: Optimized user -RIS matching vector u . 1: In itialize Θ , W , and u ; 2: while no convergence o f ˆ R sum do 3: Upd ate ρ by (15); 4: Upd ate ξ by (19 ); 5: Upd ate W by solving (24); 6: Upd ate by (2 9 ); 7: Upd ate Θ by so lving (35); 8: Upd ate u by solving (46); 9: end while 10: return u opt . the user-R IS matching problem : ˆ R sum = K X k =1 P X p =1 η k log 2 (1 + ˆ γ k,p ) (36) where the v ir tual SINR ˆ γ k,p is equivalent to the r eal SINR γ k,p in ( 8) in which the en d-to-end chan nels h H b,k,p are replaced b y ˆ h H b,k,p = H H b,k,p + R X r =1 u k,r F H r,k,p Θ H r G b,r,p . (37) Next, let R match denote the maxim u m n umber of RISs that each user c a n be m atched with ( R match ≤ R ), thus the user- RIS matching problem P match can be formulated as P match : ma x u , W , Θ ˆ R sum ( u , W , Θ ) = K X k =1 P X p =1 η k log 2 (1 + ˆ γ k,p ) s . t . C 1 : K X k =1 P X p =1 k w b,p,k k 2 ≤ P b, max , ∀ b ∈ B , C 2 : θ r,n ∈ F , ∀ r ∈ R , ∀ n ∈ N , (3 8) C 3 : u k,r ∈ { 0 , 1 } , ∀ k ∈ K , ∀ r ∈ R , C 4 : R X r =1 u k,r ≤ R match , ∀ k ∈ K , where C 3 is zero-o ne co n straint o f the indicato r variable u , and C 4 ensures that each user can only b e matched with at most R match RISs. Our goal is to find a best-possible matching vector u opt to maximize the virtual sum-rate 4 ˆ R sum in user-RIS matching problem P match in (38). Howe ver , d ue to th e non-convexity of zero- o ne con straint C 3 , the pr oblem P match is challeng in g. Again, we con sid e r to so lve the prob le m via alternative optimization , which will be detailedly introdu c ed in the next subsection. C. User-RIS matching: LCR- based method W e consider to s olve th e matching pr oblem P m in (38) by optimizing u , W , and Θ alternately . Note that, when u is fixed, the problem P match in (38) h as the same form as the 4 The virtual WSR ˆ R sum is just the bonus function for user-RIS matching instead of the real WSR, while the real W SR can be e v aluat ed by substitutin g the optimize d W opt and Θ opt into R sum in (9). 9 original problem P o in (10). There fore, the desired algorith m to solve P match can be r ealized by inserting a new step of optimizing u into Algorithm 1 , and her e we summarize it as Algorithm 2 for clarity . In the rest of this subsection , we will focus o n th e step 8, i.e., op tim izing u while fix ing the o ther variables, to com plete this algorithm. Firstly , we c onsider to ref o rmulate P match as a solv able conv ex p roblem. Similar to the optimizatio n o f Θ , b y ap p lying LDR in Pr oposition 1 an d MCQT in Pr o position 3 an d then fixing all a uxiliary variables, the user-RIS matching p roblem P match can be reformu lated as: ¯ P match : max u ˆ g ( u ) = K X k =1 P X p =1 ˆ g k,p ( u ) s . t . C 3 : u k,r ∈ { 0 , 1 } , ∀ k ∈ K , ∀ r ∈ R , (39) C 4 : R X r =1 u k,r ≤ R match , ∀ k ∈ K , where ˆ g k,p ( u ) is defined as ˆ g k,p ( u ) = 2 √ µ k,p R n H k,p ˆ Q k,p,k ( u ) o − H k,p K X j =1 ˆ Q k,p,j ( u ) ˆ Q H k,p,j ( u ) + Ξ k,p k,p , (40) in which the auxiliary functions ˆ Q k,p,j ( u ) ∈ C U satisfy ˆ Q k,p,j ( u ) = B X b =1 H H b,k,p + R X r =1 u k,r F H r,k,p Θ H r G b,r,p ! w b,p,j . (41) Then, we wish to simp lif y the expression of the objective function ˆ g b y exploiting the follo wing d e finitions: β k,p,j,r = B X b =1 H k,p F H r,k,p Θ H r G b,r,p w b,p,j , (42a) β k,p,j = [ β k,p,j, 1 , β k,p,j, 2 , · · · , β k,p,j,R ] T . (42b) After sub stituting (3 1a) an d (42) into the objective function ˆ g in (39) and then rem ovin g the terms unr e la te d to u , ˆ g in (39) can be rewritten as ˆ g 1 ( u ) = − u T Ωu + 2 ζ T u (43) where Ω = diag( Ω 1 , Ω 2 , · · · , Ω K ) , ζ = ζ T 1 , ζ T 2 , · · · , ζ T K T , (4 4) in which Ω k and ζ k are gi ven b y Ω k = ℜ P X p =1 K X j =1 β k,p,j β H k,p,j , (45a) ζ k = ℜ P X p =1 √ µ k,p β k,p,k − P X p =1 K X j =1 c ∗ k,p,j β k,p,j . (45b ) Thus, ¯ P match in (39) can be equiv alen tly reorgan ized as ˆ P match : min u ˆ g 2 ( u ) = u T Ωu − 2 ζ T u s . t . C 3 : [ u ] 2 j = [ u ] j , ∀ j ∈ { 1 , · · · , K R } , (4 6) C 4 : I K ⊗ 1 T R u ≤ R match 1 K , where the con straints C 3 and C 4 are a lso equiv alently r ewritten for clearer expression. Note that, the equiv alent p roblem ˆ P match in (46 ) is actu- ally a zer o-one quad ratic p rogram ming prob lem with linear constrains, wh ich is pr oved to be NP-hard [39]. Since the dimension of the matchin g vector u is K R , when the num ber of users K an d RISs R is not too large, Bruto-Force method can be directly used to search for the o ptimal solution to ˆ P match . Howe ver, when the den sities of user s a nd RISs in cell-free network are high , it is unpractical to ado pt Bru to- Force d ue to the large search space ( 2 K R candidates). In this case, we can apply linear conic relax ation (LCR) [40] to re lax the zero-on e prog ramming pro b lem ˆ P match and try to find a sub-optim al solution as a substitute. In this way , we o btain the following p roposition . Proposition 4: Ap plying LCR [40] fo r the zer o-one pr o- grammin g proble m ˆ P match in (46) a n d by intr o ducing an symmetric auxiliary matrix U ∈ R K R × K R to replace the matrix uu T , ˆ P match can be reformulated as ˜ P match : min u , U ˆ g 2 ( u , U ) = T r ( ΩU ) − 2 ζ T u s . t . C 3 : [ U ] j,j = [ u ] j , ∀ j ∈ { 1 , · · · , K R } , C 4 : I K ⊗ 1 T R u ≤ R match 1 K , (47) C 5 : [ U ] i,j = [ U ] j,i , ∀ i, j ∈ { 1 , · · · , K R } , C 6 : I K ⊗ 1 T R U ≤ R match 1 K u T , C 7 : 1 u T u U < 0 , where the newly adde d co nstraints C 5 , C 6 , C 7 are the guar- antees for U to appro ach uu T as c lo se as p ossible, and the rank-o ne con straint of U is relaxed. Notice that, the co n straint C 3 in the pro blem ˜ P match in (47 ) is n ow conv ex, and thus ˜ P match is actu ally a so lvable semidef - inite progr amming (SDP) pr oblem. Th ereby , the optim al so- lution u opt to ˜ P match can be efficiently o btained by ado pting the mod ern SDP solvers su ch as SDPT3 [41], of which the computatio nal complexity is abou t O K 2 R 2 ( K R + 1) 2 . 5 in the worst case [42]. V . F R A M E W O R K S U P P L E M E N T S In this sectio n, more supp lem ents of the prop osed joint precod in g framework are provided . Specifically , limited by the practical h ardware im plementation , we discuss the non- ideal RIS case in Subsection V -A. Then , we analy ze the conv ergency an d compu tational com plexity of the p roposed al- gorithms in Subsection V -B and Subsectio n V -C, r espectiv ely . A. E x te n sion to non-ideal R IS cases Up to n ow , we have p rovided a complete joint p recod- ing fr amew ork for th e prop osed RIS-aided cell-f ree network , where ideal R IS case m entioned in Su b section II-C is consid- ered. In this subsection, we will extend th is frame work to the more practical non-ideal RIS cases. 1) Non-ideal RI S cases: Accord ing to (4) in Sub section II-C, F is defined as th e ideal RIS case, where b oth th e amplitude and phase of θ r,n associated with the RIS elemen t can be co ntrolled indepen dently and con tinuously . H owever , 10 limited by the hardware implementation of metam aterials, the RISs in pra c tice are usually non-id eal. F o r consistent discussion, here we redefine the ideal RIS case F as F 1 . W e also define F 2 as th e g eneral c a se wh e r e only the pha se of θ r,j can b e contro lled co ntinuou sly [3 2], and F 3 as the practical case wher e the low-resolutio n phase of θ r,n is d iscrete [24], i.e., F 1 , n θ r,n | θ r,n | ≤ 1 o , (48a) F 2 , { θ r,n | θ r,n | = 1 } , (48b) F 3 , n θ r,n θ r,n ∈ n 1 , e j 2 π L , · · · , e j 2 π ( L − 1) L oo , (48c) where L indicates that F 3 contains L discrete phase shifts. According to the simplified subpro blem ˆ P passive in (35), for the passi ve precod ing d e sig n at the RISs, when the ph ase shift con straint F is the ideal case F 1 as d iscussed above, the subproble m ˆ P passive can be directly solved du e to th e conv exity of F 1 . Howev er , wh en the constraint F in (35) is non-id eal F 2 or F 3 , the simplified subpro blem ˆ P passive in (35) becomes non - conv ex. T o address such p roblems, we provid e the feasible solu tions in the following two parts, respectiv ely . 2) Optimal solution in continuo us p h ase shift case F 2 : When F = F 2 , the subproblem (35) can be equiv alently rewritten as ˆ P passive-con : min Θ g 6 ( Θ ) = θ H Λ θ − R 2 θ H ν s . t . C 2 : | θ r,n | = 1 , ∀ r ∈ R , ∀ n ∈ N , (49) which is no n-conve x due to the co nstant mo dulus constrain t. Fortunately , a similar subpr oblem has been discussed in [19, Eqn. 41 ], wh ile it has been proved that its o ptimal solu tion can be ob tained by ad opting the majorization-minim ization ( MM) algorithm [4 3 ] or comp lex circle ma n ifold (CCM) algor ith m [44]. 3) Appr oximatio n in discr ete pha se shift ca se F 3 : When F = F 3 , the common solu tion to address the non-convex constraint of discrete space is app roximatio n projection [17], [23], [28] . Specifically , we can first relax F 3 to F 2 , and ob tain the o ptimal solutio n θ opt by solv in g (49 ). Then , following the proxim ity principle, we can simply project the solved θ opt to the elements in F 3 by a approxim ation pr ojection, written as ∠ θ sub r,j = argmin φ ∈F 3 ∠ θ opt r,j − ∠ φ , ∀ r ∈ R , ∀ j ∈ N , (50) where θ sub r,j denotes the approxima ted sub- o ptimal solution to the p hase shift θ r,j . Th us, we can fin ally o b tain the sub-op timal solution Θ sub ∈ F 3 to the subproblem (35). B. A lg orithm con ver gency In the ideal case F = F 1 and general case F = F 2 , the propo sed joint pr ecoding framew o rk, h as strict con vergency 5 , since each step of the iteration, i.e . , ( 15), ( 19), (24), ( 29) a n d (35), can be easily proved to be mono tonous. However , in the no n-ideal case F = F 3 , the convergency of th e pro posed framework can n ot be proved strictly , s ince th e update of Θ has n o guarantee of monotony in some cases d ue to 5 Note th at, the proposed joint prec oding scheme con verges to a feasibl e solution, while only the con vergenc e rate is fully analyze d can its local optimali ty be strictly proved. T ABLE I C O M P U TA T I O N A L C O M P L E X I T Y F O R U P DAT I N G E A C H VAR I A B L E . V ariable Computatio nal com p lexity O ( · ) ρ P K K U B M + U 3 + ( K + 1 ) U 2 + U ξ P K K U B M + U 3 + ( K + 1) U 2 W I a B 2 M 2 P 2 K 2 + B M P K P K U 3 + ( K + 1) U 2 Θ I p R 2 N 2 + RN u K 2 R 2 ( K R + 1) 2 . 5 the approx imation oper a tion in (50 ) . Besides, for Algo rithm 2 , how the relaxa tio n operatio n of op timizing the user-RIS matching vector u will influence th e global co n vergency is also u npredicta b le [40]. Fortun ately , since the rest of iterative steps a r e a ll mo notono us, actu ally the loss cau sed by the approx imation operation and relaxation opera tio n have little adverse effect on the global co n vergence, which w ill be verified through simulations in the n ext Section VI . C. Compu tational complexity The ov erall computational com plexities o f the prop osed joint pr e c oding fr amew ork and its two-timescale exten sion are mainly intro duced by th e u pdates of the variables ρ , ξ , W , , Θ , a n d u , as shown in (15), ( 1 9), App e ndix A, (29), Append ix B, and (47), resp ecti vely . T o m ake it c lear , we summarize their computational com plexities in T ab . I, wh erein I a and I p are the requir ed iteration numbers for the conv ergence o f the subprob lems ˆ P active in (24 ) an d ˆ P passive in (35 ), respectively . From T ab. I, we can observe th at the updates of ρ , ξ , and have much lower compu tational comp lexity than W , Θ , and u , since ρ , ξ , an d have close-fo rm up date formu la wh ile W opt , Θ opt , an d u opt can only be obtain ed by solving QCQP an d SDP pro b lems via iter ati ve optimizatio n methods. Furthe r more, sinc e the d ensity of BSs an d users in cell-free network is high [9] and the nu mber of RIS elements is usually lar ge [ 18], we can reasonably assume that B M P K ≫ U and R N ≫ U . Under this a ssum ption, the overall c omputation al complexity of Algo rithm 1 can be approx imated by O I o I a B 2 M 2 P 2 K 2 + I p R 2 N 2 and that of Algorithm 2 can be similarly appr oximated by O I o I a B 2 M 2 P 2 K 2 + I p R 2 N 2 + K 2 R 2 ( K R + 1) 2 . 5 , wherein I o denotes the req uired num ber of iteratio ns for the algorithm conv ergence. V I . S I M U L AT I O N R E S U L T S In this section, we provided extensi ve simu lation results under different con d itions to validate the perform ance of the propo sed conc ept o f RIS-aided cell-free network. A. S imulation setup For the simulation of the pr oposed RIS-aided cell-free network, we draw on the potential d eployment schemes for cell-free network fr o m the existing works [8] to construct simulation scen arios. For simplicity but withou t loss of gener- ality , we consider a 3-D scenario with the topolo g y shown 11 W ork Report X (m) Y (m) BS 1 BS 2 BS 3 BS 4 BS 5 ( L ,0) u se r 1 u se r 2 u ser 3 u se r 4 u s u s L (0,0) RIS 1 RIS 2 (160, -50, 3) (40, -50, 3) (80, -50, 3) (120, -50, 3) (0, -50, 3) green belt 3 m 6 m (60, 10, 6) (100, 10, 6) ( ( L L ( ( ( ,0) 0 ) user 2 u s er user 3 3 us er 4 ( ( us er u s e r 1 1 4 Fig. 5. The simulation sc enario where fiv e BSs assisted by two RISs serve four users. in Fig. 5. In this setup, a cell-free network with five BSs serve fo ur users simultaneo usly , while the network ca pacity is limited due to the obstru ction of a green b elt. T o improve the capacity , two RISs are separately de p loyed on two dis- tant building surfaces, which are h ig h en ough to constru c t extra reflection links. W e assume th e i -th BS is located at (40 ( i − 1 ) m , − 50 m , 3 m ) , and two RISs are loca ted at (60 m , 10 m , 6 m ) an d (10 0 m , 10 m , 6 m ) , respectively . Since the BS in cell-free ne twork is usually sm a ll with few antenna s and lo w tran smit p ower [ 8], we furth e r ass ume the max im um transmit power at the BS is set a s P b, max = 0 dBm, wh ile the number of an tennas at each BS is set as M = 2 and that at each u ser is s et as U = 2 . The numbe r of RIS elements is set as N = 100 . The nu mber of subcarriers is set as P = 4 , and the noise power is set as σ 2 = − 80 dBm [32] . For the ch annel m odel, we co nsider the same settings as those in [32]. For the large-scale fading m odel, firstly we define d Bu , d BR , d Ru as the distance between BS and user, BS and RIS, RIS an d u ser , respec tively . Thus the distance- depend ent path loss mo del i s given by L ( d ) = C 0 d d 0 − κ , d ∈ { d Bu , d BR , d Ru } (51) where C 0 is the path lo ss at the referen ce distance d 0 = 1 m and κ d enotes the p ath loss expo nent. Here we assume C 0 = − 3 0 dB, an d the path loss expon e nts o f th e BS-RIS link, RIS-user link, and BS-user lin k are set as κ BR = 2 . 2 , κ Ru = 2 . 8 , and κ Bu = 3 . 5 [32], resp e cti vely . T o acco unt for the small-scale fading, we fu r ther conside r a Rician fading channel model, thus the BS-user channel H is obtained by H = r ω Bu 1 + ω Bu H LoS + r 1 1 + ω Bu H NLoS , (52) where ω Bu denotes the Rician factor , and H LoS and H NLoS denote the LoS and Rayleigh fading compon ents, respec ti vely . Note that H is equivalent to a LoS chan nel when ω Bu → ∞ , and a R ayleigh fadin g ch annel when ω Bu = 0 . Then, H is multiplied by the sq uare root of the distan ce-depen d ent path lo ss L ( d Bu ) in (51). Similarly , the BS-RIS and RIS-user 0 20 40 60 80 100 120 140 160 0 2 4 6 8 10 12 Ideal RIS case Two-timescale scheme Without direct link Random phase shift Without RIS Fig. 6. W eighted sum-rate against the distanc e L . channels can also b e gen erated by th e above p rocedu r e, and let ω BR and ω Ru denote the Rician factors of them, respectively . W e further assume ω BR → ∞ , ω Bu = 0 and, ω Ru = 0 [32]. At last, for the joint precodin g frame work, we set the weights of users as η k = 1 . As an altern ating alg orithm, Θ is initialized by rand om values in F , W is initialized by iden tical power and ran dom phases, and u is initialized b y setting all of its elements to one. B. W eighted sum-rate of the RIS-aided cell-fr ee network The WSR of the proposed RIS-aided c e ll- free network is ev alua ted in this subsection. Firstly , we assume that fou r users are ra n domly distributed in a circle cente r ed at ( L, 0) with radius 1 m . The heig ht of these users is set as 1 . 5 m , and we also assume the ideal RIS case ( F = F 1 ). The n, we plot the WSR against th e distance L in Fig. 6, in wh ich the five curves are defined as follows: • Ideal RIS case: Based on the fu lly-known CSI, Algo- rithm 1 is per formed to m aximize the WSR. • T wo-timescale scheme: This curve is realized in three steps. First, Algorithm 2 is p erform e d to match each user with no mor e than R match = 1 RISs. Then, o nly the RIS-aided cha n nels of the m atched user-RIS pair s and the direct-link cha n nels are utilized for joint precoding design throug h Algorithm 1 . Finally , WSR is obtained by sub stituting th e o ptimized W opt and Θ opt from Algorithm 1 into R sum in (9). • W ith out dir ect link: Assume that all direct links between BSs and users are completely obstruc ted ( H = 0 ), and then Algorithm 1 is perf ormed to ma x imize the WSR . • Rando m pha se shift: All th e phase sh ifts of RIS elemen ts are rando mly set to the values in F 1 . Then , based on the combined chann els, Algo rithm 1 is on ly perfo rmed at BSs to maximize the WSR . • W ith out RIS : The conv entional cell-free netw ork witho ut RIS. Based o n the CSI of BS-user channels, th e m ulti- user preco ding m ethod in [ 3 4] is pe rformed at BSs to maximize the WSR. 12 5 10 15 20 25 30 0 2 4 6 8 10 12 Fig. 7. W eighted sum-rate against the number of iterations I o . From F ig. 6, we hav e three observations. First, for th e schemes with RIS deployed, we can see two obvious peaks at L = 60 m and L = 100 m . It indicates th a t the WSR rises when th e users approach one of the tw o RISs, since the users can receive strong signals reflected fr om the RISs. While f o r the co nventional scheme without RIS, these two p e aks will n ot appear . Thus, we can co nclude that the network capacity can be substan tially increased b y dep loying RISs in the network , and the signal coverage can be accor d ingly extended . Second, we n otice that the p erform ance of “ Ran dom phase shift ” h as very limited gain compared with th e scheme witho ut RIS. The reason is that, without passi ve beamform ing at RISs, the signals reaching RISs can n ot b e accurately directed to the users, which demon strates the n ecessity o f passive p recoding . At last, we no tice that, compared with “ Id eal RIS case ”, “ T wo- timescale scheme ” suffers an averaged perform a nce loss of about 10 % . The r eason is that, “ Ideal RIS case ” acquires and utilizes a ll RIS-aided channels ( K R = 8 ) for joint precod in g d esign, while “ T wo-timescale scheme ” only acqu ires and utilizes the RIS-aide d ch annels of the matched u ser-R IS pairs ( K R match = 4 ). In later Subsectio n VI-E, we will analyze the system WSR with dif f erent R match in detail. C. Con verg ency of th e joint pr ecod ing fr amework T o show the con vergency of th e prop osed alg orithms, we plot the WSR again st the numb er of iterations I o in Fig. 7 by running algo rithms onc e with ran dom initializatio ns. The simulation s etups are same as those used in Su bsection VI -B, and we fix th e distance L as L = 65 m . T o ev alu ate the conv ergency in n on-ideal RIS phase shift cases, we add the curves “ Continu ous phase shift ”, “ 1-b it phase shift ”, and “ 2- bit pha se sh ift ” to den o te the cases F 2 and F 3 . The resu lts in Fig. 7 illustra te that, when the con vergence err or is no more than 1 % , th e prop osed joint precodin g framework can conv erge within 15 iterations. T o be mor e specific, the ideal RIS case, tw o-timescale scheme, continuous phase shift case, and the case witho ut dir e ct links can converge within 15 iterations, while the discrete pha se shift case can converge 0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 3 4 5 6 7 8 9 10 11 12 5% 20% Fig. 8. W eighted sum-rate against the CSI error parameter δ . within 10 iteration s. Since the conv entional cell-free network without RIS and the sch eme “ Rando m phase shift ” do not need to address the RIS pre coding, the WSR in these cases can conver ge within 5 iterations. The resu lts also ind icate that, althoug h the appr oximation operation in (5 0) causes the uncertainty o f c o n vergence, the prop osed framework still enjoys a fast glo bal conver gence. Mor e impo rtantly , we fin d that th e curves “ Idea l RIS case ” and “ Continuo us pha se shift ” are very close. The essential re a son is that, for “Ideal RIS case”, actually most o f th e op timized RIS elemen ts h av e an amplitude equa l to 1 . It indicates th a t, for th e prec oding d esign of the amp litude-unc o ntrollable RIS, we can simply r elax its constant-mo dulus constraint an d optimize its precodin g as an ideal RIS. Th en, we can directly project the o ptimized precod in g matr ix to the co nstant-mod ulus an d obtain the final design. In this way , the optim iz a tio n of RIS precodin g becomes simple and low-complexity . Besides, it also im plies that there is no need to d esign an amplitude-con trollable RIS for wireless communica tio ns. D. Ro bustness of the joint pr ecoding to CSI err or Generally , in the proposed RIS-aided c ell-free system, th e channel estimation is very challengin g due to the high - dimensiona l channels. Here we analy ze the robustness of the propo sed joint precod ing scheme to CSI error . T o generate the imper f ect channels, we m odel the practically estimated channel ˆ h as [45] ˆ h = h + e, (53) where h denotes the real channel and e repre sents the es- timation erro r with Gaussian distribution and zero m ean, i.e. e ∼ C N 0 , σ 2 e . W e assume the v ariance σ 2 e , i.e. the error power, satisfies σ 2 e , δ | h | 2 wherein δ denotes the ratio of the err or power σ 2 e to the channel gain | h | 2 , which characterizes th e le vel of CSI er r or . Then, u sing th e same setups in Subsection VI-C, we p lot the WSR against the CSI error par a m eter δ in Fig. 8. From this figur e , we can observe that, th e p e rforman ce lo ss g rows with the increasing 13 -20 -10 0 10 20 30 0 20 40 60 80 100 120 140 -5 0 5 0 10 20 Fig. 9. W eighted sum-rate against the BS transmit power P b, max . of δ . Particularly , for the “ Ideal RIS case ”, compar e d with the perfect CSI witho ut erro r (i.e. δ = 0 ) , the system perfor mance suffers a loss of 5% when the error power is 10% of the channel gain (i.e. δ = 0 . 1 ) , and a loss of 20% when δ = 0 . 3 . Thereby , the pr oposed joint pr ecoding scheme shows strong robustness to C SI error . E. Th e imp act of k e y system parameters T o reveal mor e insigh ts of the proposed RIS-aided cell- free network with different system parameters, we con sider a new simulation scenar io with more dispersed users and reset the lo cations o f the four users in Fig. 5 as ( L − 60 m , 0) , ( L − 20 m , 0) , ( L + 20 m , 0) , and ( L + 60 m , 0) , respectively . 1) WSR against BS transmit power: By fixing L = 80 m , we present the a verage w e ig hted sum-rate aga inst the BS transmit power in Fig. 9 . From this figur e we can observe that, with the increase of the BS transm it power , the weighted sum-rate rises r apidly in all cases. Particularly , “ T wo-timescale scheme ” achieves very similar perfo r mance to “ Id eal RIS case ”. It indicates that, the RIS-aided channels of the un- matched user-RIS pairs indeed have n egligible contr ibution to capacity imp rovement, which d e monstrates the effecti veness of the proposed two-tim e scale joint precod ing scheme. Besides, we h av e an imp ortant findin g that, the perfo r mance gain broug ht by RISs is significant only when the BS transmit power is moderate ( e .g., fo rm 0 dBm to 20 d Bm), while th e perfor mance gain beco mes negligible when the BS tran smit power is to o low ( e .g. -20 dBm) or too high (e. g. 30 dBm). W e explain this phenomeno n in detail as follows . Intuitively , wh en the BS transmit power is too low , the reflected signals b y RIS are so weak that RISs hav e little contribution to perf ormance improvemen t. While, when the BS transmit power is too high, the BSs prefer to allo cate most of the power to the b eams towards the BS-user links rather than the bea ms towards the BS-RIS-u ser link s, which makes the role o f RISs less obvious. T o be specific, as we can ob serve fr o m Fig. 9, “ W ithou t dir ect link ” can be ro ughly regarded as th e scheme when the BSs allocate all power to the 20 40 60 80 100 120 140 160 180 200 0 2 4 6 8 10 12 14 14% 21% Fig. 10. W eighted sum-rate against the number of RIS elements. BS-RIS-user links, while “ W itho ut RIS ” den o tes th e scheme when the BSs a llo cate all power to the BS-user links [ 3 2]. W ith th e increasing of BS transm it p ower , th e perform a n ce gap between th ese two sch e mes becomes larger and larger . It indicates that, comp ared with the first schem e (i.e. BSs allocate all power to the BS-user link s), th e b e nefit o f applying the second schem e (i.e. BSs allocate all p ower to the BS-RIS- user link s) is re la tively lower and lower . When the BS transmit power is large en ough, the perf ormance can ob tain mu ch mo re gain from BS allocating power to BS-u ser link th a n to BS- RIS-user link, since th e p erforma nce gap between them is too large. In th is c a se, the BS will tend to allocate most of its power to the be am tow ards the BS-user link, wh ich weakens the role of RIS. 2) WSR against number o f RI S eleme n ts: Using the same setups as above, we p resent the average we ighted sum- r ate against the nu mber of RIS elements in Fig . 10. W e c a n observe that, the WSR of the prop osed RIS-aided cell-fr e e network increases as the n u mber of RIS elem ents rises. More imp or- tantly , we find tha t, with the increasing of RIS elements, th e approx imation loss of the low-resolution phase shift becom es larger . For instance, wh en N = 100 , the app roximatio n loss in the case “ 1-bit phase shift ” is about 14% of the ideal case, and this loss grows to 21 % when N = 18 0 . The o bservation implies that, when the n umber o f RIS is large, is is necessary to use more accu r ate p hase shif ts for passive precodin g, so that the signals reflected from RISs ca n reach th e users more precisely . In addition, since the dimensio n of Θ is RN , the complexity of solving (3 5) grows with the numb er of RIS elements N , a n d too more RIS elemen ts will also m a ke the channel estimations mor e challenging. Thus, it is essential to choose the RIS element number reasonably . 3) WSR with differ ent allowab le matched user -RIS pairs: T o evaluate the p erforma nce of the pro posed two-timescale extension o f the joint precoding s cheme, in this part, we analyze the system WSR with different R match , which deno tes the maximum nu mber o f R ISs that ea c h u ser c a n b e matched with. T o sh ow more insights, in the s ame simulation scen ario 14 0 20 40 60 80 100 120 140 160 2 4 6 8 10 12 14 Fig. 11. W eighted sum -rate against the distance L w ith dif ferent allow able matched user-RIS pairs. shown in Fig. 5, we reset the total number of RISs as R = 7 and the R IS elements as N = 5 0 . W e fu rther a ssum e that th e i -th RIS is lo cated at (20 × i m , 10 m , 6 m) . Then, we plot the WSR ag ainst the distance L with different R match in Fi g. 1 1. From this figu re, we can o bserve th at, the WSR increases as each user can be m a tc h ed with mo re RISs. Compar ed with the ideal joint preco ding design wh ic h acquire s an d utilizes all K R = 28 RIS-aided channels, the proposed two-timescale scheme su ffers perfo rmance but con sumes much less overhead for CSI acquisitions. For example, wh en R match = 3 , i.e. each user can be matche d with at most 3 RISs, compare d with the perfect joint preco ding design to some extent, the propo sed two-timescale sche me acquires and utilizes n o mor e than K R match = 12 RIS-aide d chan nels for joint preco ding design but only suffers an averaged capa c ity lo ss of abo ut 5% . Particularly , at the positions from L = 60 m to L = 100 m , the two-timescale scheme ( R match = 3 ) can almost ach iev e the same perf ormance as the ideal joint precodin g d e sign. In this way , the prop o sed two-timescale scheme con su mes much less overhead for acquiring RIS-aided ch a n nels from the long -term perspective [22 ]. Thus, we can conclu de that, the pr oposed two-timescale scheme c an serve as a efficient scheme for balancin g the perfo rmance and overhead for CSI acquisitions, which is especially suitab le to employ in th e ce ll- free networks with a large num b er of d istributed RISs. F . T rade-o ff between the number of BSs and RISs Since deploying m ore RISs can improve the n etwork cap ac- ity with low cost and power co nsumption , in th is subsection we analy ze the trad e-off between the nu mber of BSs an d RISs. T o fairly ev aluate the losses and gains, here we take the energy ef ficiency as the perfo rmance m etric. According to the power consu mption mod el developed in [15], the system energy efficiency is gi ven by E sum = R sum τ r k W k 2 + B P BS + K P UE + RN P RIS , (54) 5 10 15 20 0 2 4 6 8 10 12 14 16 18 20 22 0.02 0.04 0.06 0.08 0.1 0.12 Fig. 12. S ystem ener gy ef ficienc y against BS number B and RIS number R . where τ − 1 r is the efficiency of the transmit po wer am pli- fier , while P BS , P UE , an d P RIS denote the hard ware p ower consump tion at each BS, ea ch u ser , and each RIS element, respectively . For the simulation setu ps, we consider the same settings as those in [15 ], i.e. τ r = 1 . 2 , P BS = 9 d BW , P UE = 10 dBm and P RIS = 10 dBm. T o find more essential in sights, we reset som e parameters as P = M = U = 1 and N = 20 . W e fix the distance-dep endent effects by setting th e related distances as d Bu = d BR = 110 m a n d d Ru = 15 m. By perfor ming Algorit hm 1 in ideal RIS case, we plot the energy efficiency against the numb er of BSs B and th at of RISs R in Fig. 12 . From this figure, we can o bserve th at, given B , the energy efficiency can be sign ificantly improved b y increasing the numbe r of RISs R . Particularly , when B = 7 and R = 9 , the max im al energy efficiency can be achieved, i.e. E sum = 0 . 138 bit/s/Hz/W . Howev er , when R is too large, the energy efficiency will decline af ter deploying more RISs. F o r example, given B = 7 , th e system energy efficiency decreases to E sum = 0 . 09 bit/s/Hz/W wh e n R = 21 , which is ab out a 34.8% loss. The reason is th at, when the network capacity is large eno ugh, the capacity impr ovemen t via dep loying more RISs cannot make up fo r the extra p ower consu m ption. Th ere- fore, carefully designing th e trade-off between the number of BSs and RISs is the g u arantee for balancing the capa city a n d power con sumption in practical systems. V I I . C O N C L U S I O N S A N D F U T U R E W O R K S In th is paper, we first p ropose the conce pt of RIS-aided cell- free network , which aim s to imp r ove th e network capacity with low cost and power co nsumption . Then, for th e p roposed RIS- aided cell-free network, in a typ ical wid e band scen ario, we formu late the joint preco d ing design problem to maximize the weighted sum-rate to optimize the network capacity , subject to the tran smit p ower con straint of BS and the phase shift constraint of RIS. Finally , we pr opose a jo int pre c oding framework to solve th is pr oblem. Since most of the con sidered scenarios in existing works are special cases of the gener al 15 scenario in this p aper, the prop osed joint precod in g f ramew ork can also serve as a ge n eral solutio n to maximize the capacity in m o st of existing RIS-aided scenarios. Simulation r e su lts demonstra te that, with the assist of low-cost and e n ergy- efficient RISs, the propo sed RIS-aided cell-fr ee network can realize high e r cap acity tha n the conventional cell-f r ee ne twork . Compared with the traditional cell-free n e twork , th e pro- posed RIS-aided cell-f ree network can achieve wider sig- nal coverage [1 3], higher spectru m [ 3 2], and hig her energy efficiency [15] . For future works, some open problems are still worth f u rther investi gations. For example, some other importan t per formanc e metrics such as the e n ergy efficienc y [15], BS tra n smit power [17], and user fairness [23] are left for futur e works. Besides, som e new h ardware ar chitecture such as activ e RIS [46] can be considered to further enhance the capac ity . In som e specific scenario s such as the intern et of vehicles, how to select the repla c ed BSs an d optimize the placements of RISs is also an interesting research d irection. Another pr omising technique benefitin g from the advance of meta - materials is large intelligent surface ( L IS) [47]– [49]. Different fr om the p a ssi ve RIS, LIS is considered as a qua si- continuo us surface [47 ] wh ich can actively ac h iev e surface beamfor ming [4 8]. Moreover, the signal m odel of L IS is in continuo us-integral for m [47 ] –[49]. The introduc tion o f LI S into cell-f ree network will bring many op en problem s, such as how to bridg e the gap between discrete mod e l and contin u ous model, which are also left for future work s. A P P E N D I X A P D S - BA S E D M E T H O D F O R S O LV I N G S U B P RO B L E M ( 2 4 ) W e consider to s olve (24) via the PDS meth o d [37 ]. Firstly , by introdu c in g L agrange mu ltipliers λ = [ λ 1 , · · · , λ B ] T ∈ R B and ϑ > 0 , the Lagran g ian for the augmented p roblem o f ( 24) can be written as Γ 1 ( W , λ ) = g 3 ( W ) + λ T F ( W ) + ϑ 2 k F ( W ) k 2 . (55) where the function vecto r F ( W ) ∈ R B is defin ed by F ( W ) = F + 1 ( W ) , · · · , F + B ( W ) T with F b ( W ) being F b ( W ) = W H D b W − P b, max . Next, we introduc e a superscript t to each variable as the iteration index, and we have the itera tive f ormulas o f W t and λ t written as W t +1 λ t +1 = W t λ t − α t ∂ Γ 1 / ∂ W | W = W t − ∂ Γ 1 / ∂ λ | λ = λ t (56) where the step length α t > 0 is a sufficiently small po siti ve value and the iteration dir e c tions ∂ Γ 1 / ∂ W and ∂ Γ 1 / ∂ λ are giv en by ∂ Γ 1 ∂ W = ( A W ) ∗ − V ∗ + B X b =1 λ b + ϑF + b ( W ) Π ∗ b ( W ) , (57a) ∂ Γ 1 ∂ λ = F ( W ) , (57b) wherein the au x iliary fu n ction Π b ( W ) ∈ C B M P K is denoted by Π b ( W ) = D b W , F b ( W ) > 0 0 B M P K , F b ( W ) ≤ 0 , ∀ b ∈ B . (58 ) By simu ltan eously optimiz in g W and λ via (56) un til conver - gence, the op timal W opt can be fina lly ob tained without need of the in version opera tio n for the high-dime n sional matrix A . Remark 1: W e d iscuss the computationa l complexity of solving (24). Since D b is a fixed diag o nal matrix with M P K elements b eing 1, we can simply derive th at the complexity of co m puting F + b ( W ) is O ( M P K ) . Th en, we c a n furth er obtain th at the comp utational complexity of updating W and λ via ( 56) ar e O B 2 M 2 P 2 K 2 and O ( B M P K ) , respectively . Let I a denote the requ ired iteration n u mber for c o n vergence. Then the overall complexity of the app lied PDS-based method is about O I a B 2 M 2 P 2 K 2 + B M P K . A P P E N D I X B P D S - BA S E D M E T H O D F O R S O LV I N G S U B P RO B L E M ( 3 5 ) W e co nsider to solve (35) via th e PDS method [37] . Similar to Appen dix A, by intro ducing Lagr ange multipliers χ = [ χ 1 , · · · , χ RN ] T ∈ R RN and ϕ > 0 , the Lagrangian fo r the augmented problem of (35) can b e derived as Γ 2 ( Θ , χ ) = g 6 ( Θ ) + χ T G ( Θ ) + ϕ 2 k G ( Θ ) k 2 , (59) where the f u nction vector G ( Θ ) is defined by G ( Θ ) = G + 1 ( Θ ) , · · · , G + RN ( Θ ) T with G j ( Θ ) = θ H E j θ − 1 an d E j , e j e H j . Then, we have the iterative for m ulas o f θ t and χ t written as θ t +1 χ t +1 = θ t χ t − β t ∂ Γ 2 / ∂ θ | θ = θ t − ∂ Γ 2 / ∂ χ | χ = χ t (60) wherein β t > 0 denotes the sufficiently small step length an d the iteration directions ∂ Γ 2 / ∂ θ and ∂ Γ 2 / ∂ χ are o btained by ∂ Γ 2 ∂ θ = ( Λ θ ) ∗ − ν ∗ + RN X j =1 χ j + ϕG + j ( Θ ) Ψ ∗ j ( θ ) , (61 a) ∂ Γ 2 ∂ χ = G ( Θ ) . (61b) Note that, the auxiliary function Ψ j ( θ ) ∈ C RN is defined as Ψ j ( θ ) = E j θ , θ H E j θ > 0 0 RN , θ H E j θ ≤ 0 , ∀ j ∈ { 1 , · · · , RN } (62 ) By simultaneously optimizing θ and χ via (60) until conver - gence, the optimal Θ opt can be finally obtained without need of the in version operation for the high-dimension a l matrix Λ . Remark 2: W e study the comp utational complexity of solv- ing (35) . Similar to Remark 1 , we can e asily derive that th e complexity of updating Θ and χ by (60) are O R 2 N 2 and O ( RN ) , respecti vely . Therefo re, th e overall co mputation a l complexity is O I p R 2 N 2 + RN where I p denotes the required iteration number for con vergen c e . R E F E R E N C E S [1] Z . Zhang and L. Dai, “Capaci ty improv ement in wideband reconfig- urable intel ligent surface-ai ded cell-free network, ” in Proc . 2020 IEE E 21st Int. W orkshop o n Signal Proc ess. Advances in W ireless Commun. (IEEE SP A WC’20) , May 2020, pp. 1–5. [2] D. L ´ opez-P ´ erez, M. Ding, H. Claussen, and A. H. J afa ri, “T ow ards 1 Gbps/UE in cellular s ystems: Understan ding ultra -dense small cell deplo yments, ” IEEE Commun. Surve ys T uts. , vol. 17, no. 4, pp. 2078– 2101, Fourthquart er 2015. [3] F . E. Idacha ba, “5G network s: Ope n network arc hitect ure and densifi- catio n strategie s for beyo nd 1000x netw ork capacity increase, ” in P r oc. 2016 Future T echnol . Conf. (F T C’16) , Dec. 2016, pp. 1265–1269. 16 [4] M. Kamel, W . Hamouda, and A. Y oussef, “Ultra-dense networks: A surve y , ” IEEE Commun. Surve ys T uts. , v ol. 18, no. 4, pp. 252 2–2545, Fourth quarter 2016. [5] J. G. Andre ws, X. Zhang, G. D. Durgin, and A. K. Gupta, “ Are we approac hing the fundamenta l limits of wireless network densificati on?” IEEE Commun. Mag. , vol. 54, no. 10, pp. 1558–1896, Oct. 2016. [6] A. Lozano, R. W . He ath, and J. G. Andre ws, “Fundament al limits of coopera tion, ” IEEE T rans. Inf . Theory , vol. 59, no . 9, pp. 5213–522 6, Sep. 2013. [7] E . Nayebi, A . Ashikhmin, T . L. Marzetta, and H. Y ang, “Cell -free massi ve MIMO syste ms, ” in Pr oc. 2015 49th Asilomar C onf. Signal s Sys. Comput. (ACSSC’15) , Nov . 2015, pp. 695–699. [8] G. Interdonato, E. Bj ¨ ornson, H. Q. Ngo, P . Frenger , and E. G. Larsson, “Ubiquit ous cell -free massive MIMO communication s, ” EURASIP J . W ire less Commun. Netw . , pp. 197–206, 2019. [9] H. Q. Ngo, A. Ashikhmin, H. Y ang, E. G. Larsson, and T . L. Marzetta, “Cell -free massive MIMO versus small cells, ” IE E E T rans. W irel ess Commun. , vol. 16, no. 3, pp. 1834–1850, Mar . 2017. [10] S. Mosleh, H. Almosa, E. Perrins, and L. L iu, “Downlin k resource alloc ation in cell-free m assive MIMO systems, ” in Proc. 2019 Int. Conf. Comput. Netw . Commun. (ICNC’19) , Feb . 2019, pp. 883–887. [11] M. Attarifar , A. A bbasfar , and A. Lozano, “Modified conjugat e be am- forming for cell-fre e massi ve MIMO, ” IE EE Commun. Lett. , vol. 8, no. 2, pp. 616–619, Apr . 2019. [12] Y . Jin, J. Zhang, S. Jin , and B. Ai, “Chan nel estimation for cell-free mmwav e massiv e MIMO through deep learning, ” IEEE T rans. V eh. T echnol. , vol. 68, no. 10, pp. 10 325–10 329, Oct. 2019. [13] Y . Liang, R. Long, Q . Zhang, J. Chen, H. V . Cheng, and H. Guo, “Large intel ligent surface/an tennas (LISA): Making reflect i ve radios smart, ” J. Commun. Inf. Networks , vol. 4, no. 2, pp. 40–50, Jun. 2019. [14] E. Basar, M. Di Renzo, J. De Rosny, M. Debbah, M. Alouini, and R. Zhang, “W ireless communica tions through reconfigurable intelligent surfac es, ” IEEE Access , vol. 7, pp. 116 753–116 773, Aug. 2019. [15] C. Huang, A. Zappone, G. C. Ale xandropou los, M. Debbah, and C. Y uen, “Reconfig urable intell igent surface s for energy ef fi ciency in wireless communicatio n, ” IEEE T rans. W irele ss Commun. , vol. 18, no. 8, pp. 4157–4170, Aug. 2019. [16] M. Di Renzo, K. Ntontin, J. Song, F . H. Danufa ne, X. Qian, F . Lazarakis, J. De Rosn y, D. Phan-Huy, O. Simeone, R. Zhang, M. Debbah, G. Lerosey, M. Fink, S. Tretya ko v, and S. Shamai, “Reconfigurabl e in- telli gent surface s vs. relayi ng: Dif ference s, similarities, and performance comparison, ” IE EE Open J . Commun. Soc . , vo l. 1, pp. 798–807, Jun. 2020. [17] Q. Wu and R. Z hang, “Beamforming optimiza tion for wireless network aided by intell igent reflecting surfac e with discrete phase shifts, ” IEEE T rans. Commun. , vol . 68, no. 3, pp. 1838–1851, Mar . 2020. [18] P . W ang, J. Fang, X. Y uan, Z. Chen, and H. Li, “Intell igent reflect- ing surface-a ssisted millime ter w av e communication s: Joint acti ve and passi ve precodin g design, ” IEEE T rans. V eh. T ec h. , vol . 69, no. 12, pp. 14 96 0–14 9 73, Dec. 2020. [19] C. Pan, H. Ren, K. W ang, W . Xu, M. Elkashla n, A. Nallanath an, and L . Hanzo, “Multi cell MIMO communicat ions relying on intelli gent reflecti ng surface s, ” IEE E Tr ans. W ir eless Commun. , vol. 19, no. 8, pp. 5218–5233, Aug. 2020. [20] C. Huang, C. Zhang, J . Y ang, B. Sun, B. Zhao, and X. L uo, “Re- configurabl e m etasurf ace for multifunct ional control of electromagnet ic wa ves, ” Adv . Opt. Mate r . , vol. 5, no. 22, p. 1700485, Sep. 2017. [21] ¨ O. ¨ Ozdogan, E. Bj ¨ or nson, and E. G. Larsson, “Intellig ent reflecti ng surfac es: Ph ysics, propagati on, and pathl oss mod eling, ” IEEE W ire less Commun. Lett. , vol. 9, no. 5, pp. 581–585, May 2020. [22] C. Hu, L. Dai, S. Han, and X. W ang, “T wo-timescal e channel estimation for reconfigura ble intell igent surface aide d wireless communicat ions, ” IEEE T rans. Commun. (early access) , Apr . 2021. [23] Q. -U. -A. Nadeem, A. Kammoun, A. Chaaba n, M. Debbah, and M.- S. Alouini, “ As ym ptoti c max-min SINR analysi s of reco nfigurable intel ligent surface assisted MISO systems, ” IEEE T rans. Commun. , vol. 19, no. 12, pp. 7748–7764, Dec. 2020. [24] L. Dai, B. W ang, M. W ang, X. Y ang, J. T an, S. Bi, S. Xu, F . Y ang, Z. Chen, M. D. Renzo, C. B. Chae, and L. Hanzo, “Reconfigurabl e intel ligent surfac e-based wireless communications: Antenna design, pro- totypin g, and experimenta l results, ” IEEE Access , vol . 8, pp. 45 913– 45 92 3, Mar . 2020. [25] Q. Wu and R. Zhang, “Intelli gent reflec ting surface enhanced wireless netw ork: J oint acti ve and passiv e be amforming design, ” in Pr oc. 2018 IEEE Global Commun. C onf. (IEEE GLOBECOM’18) , Dec. 2018, pp. 1–6. [26] C. Huang, A. Zappone, M. Debbah, and C. Y uen, “ Achie vable rate maximizat ion by passi ve inte llige nt mirrors, ” in Pr oc. 2018 IEEE Int. Conf . on A coustic s, Speech and Signal Proc ess. (IEE E ICASSP’18) , Apr . 2018, pp. 3714–3718. [27] B. Di, H. Zhang, L. Song, Y . Li, Z. Han, and H. V . Poor, “Hybrid beamforming for reconfigurable intelligen t surface based m ulti-use r communicat ions: Achie vabl e rates with limited discrete phase shifts, ” IEEE J. Sel. Areas Commun. , vol. 38, no. 8, pp. 1809–1822, Aug. 2020. [28] H. Li, R. Liu, M. L iy, Q. L iu, and X. L i, “IRS-enhance d wideband MU- MISO-OFDM communica tion systems, ” in Proc . 2020 IEEE W ir eless Commun. and Networking Conf . (WCNC’20) , May 2020, pp. 1–6. [29] Y . Y ang, S . Z hang, and R. Zhang, “IRS-enhance d ofdm: Power allocat ion and passi ve array optimizatio n, ” in Pr oc. 2019 IEE E Global Commun. Conf . (IEEE GLOBECOM’19) , Dec. 2019, pp. 1–6. [30] U. Siddique, H. T abassum, and E. Hossain, “Do wnlink spectrum alloc a- tion for in-band and out-band wireless backhaul ing of full-dupl ex small cells, ” IEEE T rans. Commun. , vol. 65, no. 8, pp. 3538–3554, Aug. 2017. [31] Y . Han, S. Zhang, L . Duan, and R. Z hang, “Coope rati ve double-IRS aided communication: Bea mforming desig n and powe r scali ng, ” IEEE W ire less Commun. Lett. , vol. 9, no. 8, pp. 1206–1210, Aug. 2020. [32] Q. Wu and R. Zhang, “Intelli gent reflec ting surface enhanced wireless netw ork via joint acti ve and passiv e beamforming, ” IEEE T rans. W irel ess Commun. , vol. 18, no. 11, pp. 5394–5409, Nov . 2019. [33] Q. Z heng, Y . Li, Y . Han, Y . Jing, M. Feng, Y . Pang , J. W ang, H. Ma, S. Qu, and J. Z hang, “Ultra-wideba nd side -lobe le vel suppression using amplitude-adj ustable metasurf aces, ” J . Physics D: Applied Physics , vol. 52, no. 6, p. 065102, Dec. 2018. [34] K. Shen and W . Y u, “Frac tional programming for communicatio n systems—part I: Power control and beamforming, ” IEE E T rans. Signal Pr ocess. , vol. 66, no. 10, pp. 2616–263 0, May 2018. [35] W . Dinklebach, “On nonlinear fractio nal programming, ” Manag. Sci- ence , vol. 13, no. 7, pp. 492–498, Oct. 2014. [36] S. Boyd , N. P arikh, E. Chu, B. Peleato, and J. Eckstein, “Distri bute d optimiza tion and statistical learning via the alterna ting directi on method of m ultipl iers, ” Nov . 2014, [Online ] A vai lable: https://st anford.edu/ ∼ boyd/ papers/pd f/admm distr stats.pdf. [37] S. Boyd, “Subgradient methods, ” May 2014, [Online] A vaila ble: https: //web .stanford.edu/c lass/ee364b/lectures/subgrad method notes.pdf. [38] H. Guo, Y . Liang, J. Chen, and E . G. Larsson, “W eighte d sum- rate max imizati on for reconfig urable intel ligent surfa ce aided wireless netw orks, ” IEE E T rans. W ireless Commun. , v ol. 19, n o. 5, p p. 3064– 3076, May 2020. [39] K. G. Murty and S. N. Kabadi, “Some NP-complete problems in quadrat ic and nonlinear programming, ” Math. Pro gram. , vol. 39, pp. 117–129, Jun. 1987. [40] T . Nie, S. -C. Fang, Z. Deng, and J. E. Lavery, “On linear conic relaxatio n of discrete quadrat ic programs, ” Optimization Methods and Softwar e , vol. 31, pp. 737–754, Jan. 2016. [41] K. C. T oh, M. J. T odd, and R. H . T ¨ ut ¨ unc ¨ u, “SDPT3 — a Matlab software packag e for semidefinit e programming, versi on 1.3, ” Optimiz. Method s Softw . , vol. 11, no. 1-4, pp. 545–581, Jan. 2008. [42] Z. Y ang, L. Xie, and C. Zhang, “ A discr etiza tion-free sparse and parametri c approac h for linear array signal processing, ” IEEE T rans. Signal Proc ess. , vol. 62, no. 19, pp. 4959–4973, Oct. 2014. [43] Y . Sun, P . Babu, and D. P . Pal omar , “Majo rizati on-minimization algo- rithms in signal processing, communicat ions, and machine learning, ” IEEE T rans. Signal Pr ocess. , vol . 65, no. 3, pp. 794–816, Aug. 2017. [44] K. Alhujaili, V . Monga, and M. R angasw amy, “Transmit MIMO radar beampatt ern design v ia optimization on t he c omplex circle manifold , ” IEEE T rans. Signal P r ocess. , vol. 67, no. 13, pp. 3561–3575, May 2019. [45] P . Ubaidull a and A. Chockali ngam, “Relay precoder optimizatio n in MIMO-relay networks with imperfect CSI, ” IEE E T rans. Signal Pr o- cess. , vol. 59, no. 11, pp. 5473–5484, Aug. 2011. [46] Z. Zhang, L. Dai, X. Chen, C. Liu, F . Y ang, R. Schober , and H. V . P oor, “ Activ e RIS v .s. passi ve RIS: Which will prev ail in 6G?” arXiv pre print arXiv:2103.15154 , Mar . 2021. [47] C. Huang, S. Hu, G. C. Alexandropo ulos, A. Zappone, C. Y uen, R. Zhang, M. D. Renzo, and M. Debbah, “Holographi c MIMO surfa ces for 6G wireless networ ks: Opportuni ties, challenges, and trends, ” IEE E T rans. W irele ss Commun. , vol. 27, no. 5, pp. 118–125, Oct. 2020. [48] D. D ardari, “Communicating with large intellig ent surfaces: Fundamen- tal l imits and m odels, ” IEEE J . Sel. Ar eas Commun. , vol. 38, no. 11, pp. 2526–2537, Nov . 2020. [49] J. Y uan, H. Q. Ngo, and M. Matthaiou, “T ow ards large intelli gent s urface (LIS)-based communicati ons, ” IEEE T rans. Commun. , vol. 68, no. 10 , pp. 6568–6582, Oct. 2020. 17 Zijian Zhang (S’20) recei ved the B.E. deg ree in elect ronic engineering from Tsinghua Uni ver sity , Beiji ng, China, in 2020. He is current ly working to- ward the Ph.D. degre e in electron ic engineering from Tsinghua Unive rsity , Beijing, China. His research intere sts include physical-laye r algori thms for mas- si ve MIMO and reconfigurable intel ligent surfac es (RIS). He has re cei ved the Nationa l Sc holarship in 2019 and the Excellent Thesis A ward of Tsinghua Uni versi ty in 2020. Linglong Dai (M’11-SM’14 ) recei ved th e B.S. de- gree from Zhejiang Univ ersity , Hangzhou, China, in 2003, the M.S. de gree (with the highest honor) from the China Academy of T elecommunic ations T echnolog y , Beijing, China, in 2006, and the Ph.D. degre e (wi th t he highest hon or) from Tsinghua Uni versi ty , Beiji ng, China, in 2011. From 2011 to 2013, he wa s a Postdoct oral Resea rch Fell o w with the Departmen t of Electroni c Engineering, Tsinghua Uni versi ty , where he was an Assistant Professor from 2013 to 2016 and has been an A s sociat e Profes- sor since 2016. His current research interests include reconfigurable intellige nt surfac e (RIS), massiv e MIMO, millimet er-w av e/ T erahertz communica tions, and machine learning for wireless communications. He has coauthored the book “MmW ave Massi ve MIMO: A Paradigm for 5G” (Academic Press, 2016). He has authore d or coauthored ove r 60 IEEE journal papers and over 40 IEEE conferenc e papers. He also holds 19 granted patent s. He has recei ved fiv e IEE E Best Paper A wards at the IEEE ICC 2013, the IE E E IC C 201 4, the IEE E ICC 2017, t he IEEE VTC 2017-Fa ll, and the IEEE ICC 2018. He has also recei ved the Tsinghua Uni versi ty Outstanding Ph.D. Graduate A ward in 2011, the Beijing E xcell ent Doctoral Dissertation A ward in 2012, the China Nation al Excelle nt Doctoral Dissertat ion Nomination A ward in 2013, the URSI Y oung Scienti st A ward in 2014, the IEEE Transac tions on Broadcasti ng Best Paper A ward in 2015, the Electronic s Letters Best Pap er A ward in 2016, the National Natural Science Fou ndation of Chin a for Outst anding Y oung Schol ars in 2017, the IEEE ComSoc Asia- Paci fic Outstanding Y oung Resear cher A ward in 2017, the IEEE ComSoc Asia-Pa cific Outstanding Paper A ward in 2018, the China Communicat ions Best Paper A ward in 2019, the IEEE Access Best Multimedi a A ward in 2020, and the IEEE Communications Society Leonard G. Abraham Prize in 2020. He was listed as a Highly Cite d Researcher by Clari vat e Analyti cs in 2020. He is an Area Editor of IEEE Communications Lett ers, and an Editor of IEEE Transacti ons on Communicat ions and IEEE Transacti ons on V ehicul ar T echnolog y . Particu larly , he is dedic ated to reproducibl e research and has made a large amount of simulation codes publicly av ailable .
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment