Diversity-enabled sweet spots in layered architectures and speed-accuracy trade-offs in sensorimotor control
Nervous systems sense, communicate, compute and actuate movement using distributed components with severe trade-offs in speed, accuracy, sparsity, noise and saturation. Nevertheless, brains achieve remarkably fast, accurate, and robust control perfor…
Authors: Yorie Nakahira, Quanying Liu, Terrence J. Sejnowski
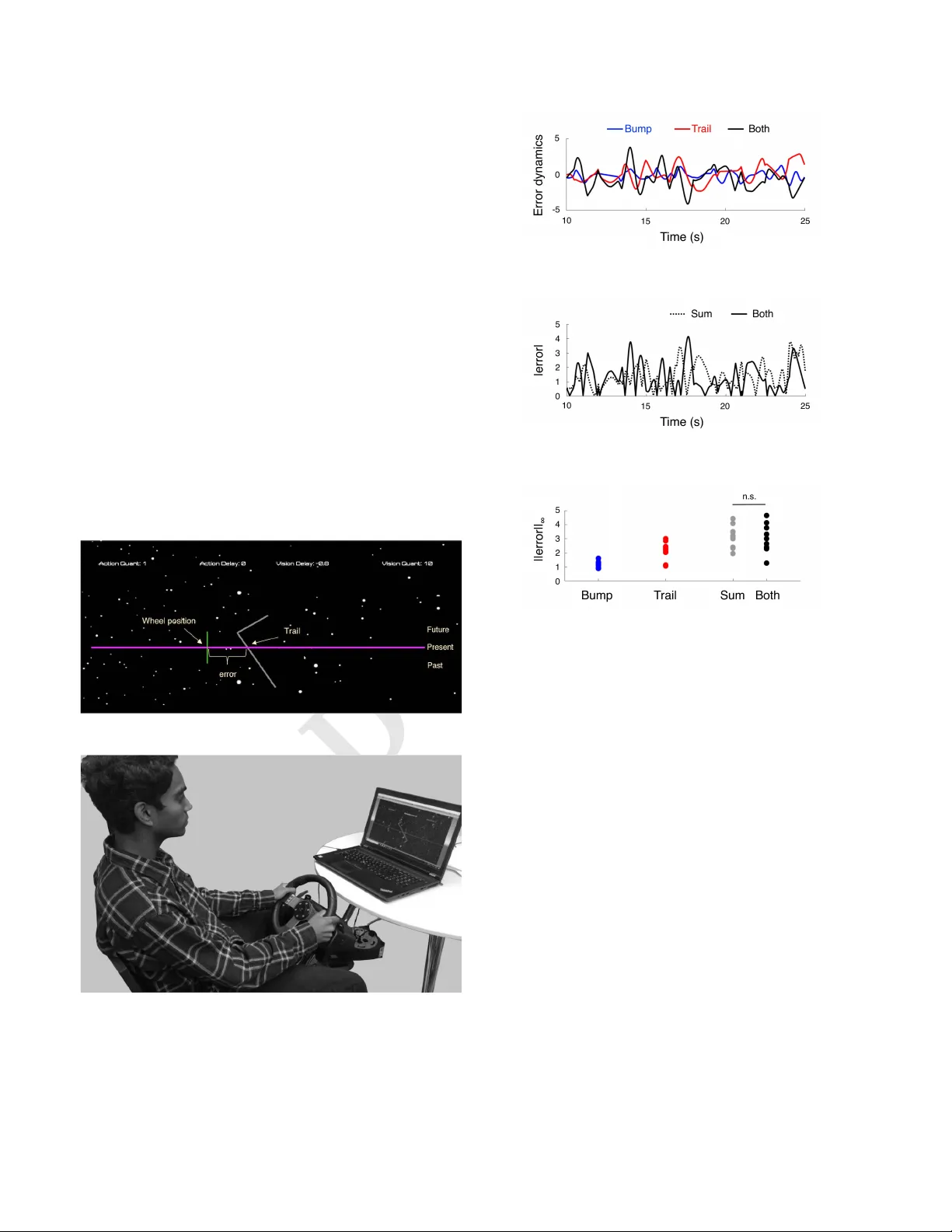
DRAFT Diversit y-enabled sw eet sp ots in la y ered a rchitectures and sp eed-accuracy trade-offs in senso rimoto r control Y orie Nakahira a,e , Quanying Liu b,e , T errence J. Sejnowski c,d, ∗ , John C. Doyle e, ∗ a College of Engineering, Car negie Mellon University , Pittsburgh, P A, USA b Depar tment of Biomedical Engineering, Souther n University of Science and T echnology , Shenzhen, Guangdong, China c The Salk Institute f or Biological Studies, La Jolla, CA, USA d Division of Biological Sciences, Univ ersity of Calif ornia, San Diego, La Jolla, CA, USA e Division of Engineering and Applied Science, Calif ornia Institute of T echnology , P asadena, CA, USA ∗ T o whom correspondence should be addressed; E-mail: terr y@salk.edu, do yle@caltech.edu. This manuscript was compiled on Ma y 4, 2021 Nervous systems sense, comm unicate, compute and actuate move- ment using distributed components with severe trade-offs in speed, accuracy , sparsity , noise and saturation. Nevertheless, brains achieve remarkably fast, accurate, and robust control performance due to a highly effective layered control architecture. Here we in- troduce a driving task to study how a mountain biker mitigates the immediate disturbance of trail bumps and responds to changes in trail direction. W e manipulated the time delays and accuracy of the control input fr om the wheel as a surrogate for manipulating the characteristics of neurons in the control loop. The obser ved speed- accuracy trade-offs (SA Ts) motivated a theoretical framework con- sisting of layer s of control loops with components having diverse speeds and accuracies within each physical le vel, such as nerve bun- dles containing axons with a wide range of sizes. Our model explains why the err or s from two control loops – one fast but inaccurate refle x- ive layer that corrects for bumps, and a planning lay er that is slow but accurate – are additive, and show ho w the err or s in eac h control loop can be decomposed into the errors caused by the limited speeds and accuracies of the components. These results demonstrate that an ap- propriate diversity in the properties of neurons across layers helps to create “diversity-enabled sweet spots” (DESSs) so that both fast and accurate control is achie ved using slow or inaccurate components. When riding a mountain bike down a twisting and bump y trail, skilled riders can descend safely without crashing despite limitations imp osed by imp erfect comp onen ts in the brain and trade-offs betw een tra veling fast and sta ying on the trail. What enables such remarkably robust p erformance in complex and uncertain en vironmen ts? Although this question is of great imp ortance in b oth science and engineering, it has received little attention in the prior work in neuroscience and control. The remarkable robustness of sensorimotor con trol has fostered the widespread illusion that system p erformance is unconstrained by the limitations of its comp onen ts ( 1 ). Con- sequen tly , little attention has b een paid to understanding the design principles that deconstrain the limitations of its com- p onen ts. How ever, in b oth biological and engineered systems, ignoring the hard limits results in fragility and may ev en lead to catastrophic failure. A clue to this puzzle lies in the striking contrast of speed- accuracy tradeoffs (SA T s) at the comp onen t level and SA T s at the system level. The constraints on sensory and motor nerves that implement sensorimotor control are often stringent. F or example, the spatial and metab olic costs to build, operate and maintain signaling in nerv es constrain the fib er sizes and n umbers of axons in a nerve. This limits the sp eed and the amoun t of information that these axons can transmit ( 2 , 3 ). Large nerves with axons that are b oth large in size and n um ber are rare (Fig. 2 ), which suggests that achieving b oth sp eed and accuracy may b e prohibitively exp ensive. Suc h comp onent limits could constrain the sensorimotor con trol to b e slow and/or inaccurate in a naiv e design. How- ev er, in practice our cognitive decision-making and sensori- motor control are remarkably robust, fast, and accurate as if the comp onent limits were deconstrained ( 4 – 9 ). Examples can b e observed in the extraordinary p erformance of athletes, moun tain biking among others, and pow er-la ws in reaching suc h as Fitts’ La w ( 7 , 10 ). This striking contrast b et w een system and comp onent SA T s in sensorimotor control suggests there are highly efficient mec h- anisms that successfully deconstrain component limitations in the sensorimotor system, so that component constraints are not apparent. Strictly sp eaking, it is not p ossible for the aggregate information rate of all comp onents to exceed the sum of the information rates of each comp onent. Although the comp onent constraints cannot be deconstrained at the comp onen t level, these constraints are unconstrained at the Significance Statement Ner v ous systems use highly eff ectiv e la y ered architectures in the sensorimotor control system to minimiz e the harmful eff ects of dela y and inaccur acy in biological component. T o study what makes eff ective architectures, we de velop a theoretical frame- work that connects the component speed-accuracy tr ade-offs (SA Ts) with system SA Ts and characterizes the system per- f ormance of a lay ered control system. We sho w that div ersity in layers ( e.g. planning and reflex) allows fast and accurate sensorimotor control ev en when each layer uses slo w or inaccu- rate components. We term such phenomena “diversity-enabled s weet spots (DESSs)”. DESSs e xplain and link the extreme het- erogeneities in axon sizes and numbers at the component le vel and the resulting robust perf ormance in sensorimotor control. Please provide details of author contributions here. Authors declare no conflict of interest. www .pnas.org/cgi/doi/10.1073/pnas .XXXXXXXXXX PNAS | May 4, 2021 | v ol. XXX | no. XX | 1– 12 D RAFT system level. This can b e achiev ed using virtualization and la y ered architectures in netw ork engineering, and we show here that similar principles are found in brains as well. There are tw o ma jor challenges in understanding the design principles found in nature that deconstrain the component limits in sensorimotor control. The first is to bridge the SA T s at the lev el of neuroph ysiology and the SA T s at the level of system and behavior. The second is to understand the in tegration and coordination of lay ers with distinct roles with heterogeneous comp onents and limitations. Despite extensive researc h fo cused on individual lev els and la y ers, there are few theoretical insights or experimental tools av ailable to in tegrate the comp onent constraints of individual lay ers with fundamen tal limits on the p erformance of the entire system. On the theory side, we do not y et know enough ab out neural co ding and con trol mechanisms to establish a complete mo del for con trol pathw a ys from sensory to motor units or to pinp oint p erformance b ottlenec ks. On the experimental side, it is difficult to nonin v asively manipulate the prop erties of the comp onen ts, including time delays and information rates, to observ e how they influence the system SA T s. A Sensorimotor control system used in oculomotor control for visual trac king Eye S low VOR Contr oller Fast Object motion Head motion Eye muscle (actuator) Visio n control ler Advan ced warning B Sensorimotor control system used in lateral control in trail follo wing Higher -layer control ler Lowe r-laye r control ler Muscle (actuator) Spin dle Visio n Steerin g wheel Error dyna mics Tra il chan ges Bumps Fast S low Advan ced warning Fig. 1. System diagrams of sensorimotor controls used for biking in a mountain trail: oculomotor control for visual tracking and lateral contr ol in trail following. (A) Diagram of two major f eedbac k loops inv olved in the e ye mov ement: visual loop and vestibular-ocular refle x (V OR) loop . Objects are tracked using the slow visual loop , while head motion is compensated f or by the much f aster V OR loop. (B) Diagram of the basic sensorimotor control model for our e xper iment that simulates lateral control in trail f ollowing. Each box is designated by its function: sensing and communication ( e.g. vision, muscle spindle sensor , v estibulo-ocular reflex), actuation (m uscle), and computation (high-lay er planning and trac king and low-la yer refle x es and reactions). Depending on the hardware details, they ma y be quantized (discrete v alued), hav e time dela ys, e xperience saturation, and be subject to noise. The trail ahead can be seen in advance, b ut the bumps and other disturbances are unanticipated. The line thickness indicates the relative speed of the pathwa y (thick er lines f or faster pathw ays). In this study , we inv estigated the influence across com- p onen t lev els and integration across control lay ers in a psy- f 10 5 10 6 1 10 .1 Olfactory Optic Ve s t i b u l a r Auditory Sciatic Avg. Axon diam. ( µ m) No. of axons per nerve 10 7 10 4 Large nerves Small nerves Large axons Small axons Equal area Accurate Fast Fig. 2. Siz es and numbers of axons f or selected nerves and the resulting SA Ts. The dashed line represents nerves with an equal cross-sectional area, which is propor tional to λ in Eq. 2 – 3 . The nerves shown hav e similar cross-sectional areas but wildly diff erent compositions of axon size and number , resulting in different speed and accuracy in nerve signaling ( 2 , 3 ). A myelin sheath around an axon can also increase its speed of propagation. Many nerves, such as the sciatic nerve, contain a mixture of axons with different siz es and degrees of my elination. c hophysical task related to mountain biking. Our study of sensorimotor integration is a first step tow ard bridging the p ersisten t gap b etw een the hardware limitations and systems p erformance. Our results suggest the imp ortance of lay ering and diversit y: The diversit y b et w een lay ers can b e exploited to ac hiev e b oth fast and accurate p erformance despite imp erfect hardw are that is slo w or inaccurate. Control systems in v olved in mountain biking. Successfully rid- ing a mountain bike down a bumpy , curv ed trail requires remarkable sensorimotor p erformance through the effective in tegration of man y subsystems, including o culomotor control for planning, lateral con trol for trail following, and balancing in rough terrain. The o culomotor control system uses a lay ered control arc hi- tecture to main tain fixation on a visual target while b ouncing do wn a trail. The v estibulo-ocular reflex (VOR) comp ensates head jostling with fast feedforw ard circuits in the brainstem, and a slo w er feedback lo op from visual cortex pursues moving targets (Fig. 1A ) ( 11 , 12 ). In addition, the cerebellum moni- tors proprio ceptiv e inputs from muscles and efference copies from motor commands. This predictiv e feedback mo dulates the gain of the V OR in the context of the curren t state of the b ody and intended actions ( 13 ). The lateral position control for trail following uses an archi- tecture with one lay er that plans the tra jectory and another la yer that stabilizes against bumps and ro c ks on the ground (Fig. 1B ). T ra jectory planning takes place in the cerebral cor- tex and basal ganglia using visual information of approac hing obstacles such as trees and winding trails. The delay in visual pro cessing b et w een the retina and the ey e muscles during smo oth visual pursuit is around 100 milliseconds ( 14 ). This higher lay er of pro cessing in teracts with a lo w er lay er ha ving faster feedback lo ops in the spinal cord that control deviations from the desired trajectory generated by a bumpy road. Results Experiments. W e developed exp erimen tal tasks and corre- sp onding sensorimotor control mo dels that mimick ed three 2 | www .pnas.org/cgi/doi/10.1073/pnas .XXXXXXXXXX D RAFT asp ects of mountain biking: comp ensation by the spinal cord for the random shaking coming down the trail, the anticipation of turns in the trail by the visual system, and the stabilization of images on the retina by the o culomotor system to comp en- sate b ouncing. W e exp erimented with the first tw o asp ects using driving exp erimen ts and the last asp ect using a few simple tasks that that the reader can easily p erform. Man y other asp ects of biking are left out, but by fo cusing only on these asp ects, we are able to make testable predictions. W e p erformed tw o driving exp eriments: The first is to test the interactions b etw een la y ers, and the second is to test the errors caused b y dela ys and rate limits in con trol within a la yer. In the tw o exp erimen ts, sub jects follow the trail on a computer screen and control a cursor with a wheel to sta y on the trail. The goal of the sub jects is to minimize the errors b etw een the desired and actual tra jectories shown in a computer monitor by moving the steering wheel (Fig. 3 , see Materials and Metho ds for details). In the first exp erimen t, the higher-la y er and the low er-lay er are co ordinated. W e compared how sub jects’ control b eha viors and the resulting errors differ in three settings: 1) when there are random force disturbances to the steering wheel due to bumps on the ground (denote as ’Bump only’), 2) when the A Visual input to the subjects B The experimental setup Fig. 3. Video monitor interface for the biking task. (A) Players see a winding trail scrolling down the screen at a fix ed speed, and with a fixed adv anced-w arning (the visible trial ahead), both of which can be varied widely . The player aims to minimiz e the error between the desired trajectory and their actual position using a gaming steering wheel. (B) Bumps are added using a motor torque in the wheel. Experiments can be done with bumps only or trails only , or both together , and with varying trail speed and/or advanced-w arning, and with additional quantization and/or time delay in the map from wheel position to pla y ers’ actual position. A Errors in the case of bump only , trail only , and both B Dynamics of the additive error in the cases of bump only and trail only v ersus error in the case of both bump and trail C Sizes of the additiv e error in the cases of bump only and trail only v ersus error in the case of both bump and trail Fig. 4. T otal error and its decomposition into the err or due to bumps and the error in trac king the trail. (A) Error dynamics from a task with only added bump , a task with only trail changes, and a task with both. (B) The size of errors from the first two tasks and the error from the last task. (C) W orst-case errors for the three cases and the sum of errors from the first two cases. Each dot denotes the worst-case error in 2 seconds. trail tra jectory is curved and c hanges direction (denote as ‘T rail only’), and 3) when b oth exist (denote as ‘Both’). Rejection of bump disturbance in the first and last settings is likely to be p erformed at the lo w er lay er reflex, while tra jectory following in the second and last settings is likely to b e p erformed at the higher lay er planning. The experimental results are sho wn in Fig. 4 . The observ ed error in setting 3 (with b oth bumps and trail curv ature) p osi- tiv ely correlated with the sum of the errors from the first tw o settings with either bumps or trail curv ature (Pearson corre- lation co efficient = 0 . 57 ), suggesting the tw o signals tended to hav e consistent sign and amplitude. Moreov er, the tw o signals show ed no significant difference in the tw o-side t-test analysis. The results suggest that the tw o lay ers could b e analyzed separately . This separability motiv ates the mo deling of each lay er separately and to further decompose the errors in to those caused by neural signaling delays or rate limits in the control lo op. The impact of neurophysiological limits was studied in the second exp eriment. W e observed c hanges in lateral control error in three settings: when external delays are added in the displa y , when external quantizers are added in the actuation effect of the steering wheel, and when b oth are added. These PNAS | May 4, 2021 | v ol. XXX | no. XX | 3 DRAF T T able 1. Parameters in the basic model. Parameter Description x ( t ) Error at time step t K Controller T s ≥ 0 Signaling delay T a ≥ 0 Advanced w arning T i ≥ 0 Internal delay T = T s + T i − T a T otal delay R signaling rate (bits per unit time) λ Cost associated with the resource use manipulations serv ed as noninv asive prob es for ho w component SA T s constrain the system SA T s. The lateral errors in the three settings are shown in Fig. 5B , and their corresp onding theoretical prediction is shown in Fig. 5A (see the mo deling details in the next section). The bridge b etw een the SA T s at the tw o levels highligh ts the b enefits of the heterogeneity observ ed in nerves (Fig. 2 ) and the adv antages of lay ering in sensorimotor control ( e.g. Fig. 1 ). Our exp erimen t primarily fo cused on the lay ers in v olv ed in lateral control. In b oth exp eriments, the head was relatively stable, and the errors of image stabilization on the retina b y VOR, though essential in mountain biking, is negligible. Another imp ortant lay er that was not included in the biking game was bike balance and turning, skills that must b e learned b efore trail following. Connecting component and system SA Ts. T o connect the SA T s b et w een the t w o lev els, we dev eloped a robust con- trol mo del that characterizes the system-level SA T s imp osed b y comp onen t-lev el SA T s and used the mo del to explain the exp erimen tal observ ations. W e mo deled the error dynamics b et w een the actual lateral position of the subjects and the cen ter of the trail as follows: x ( t + 1) = x ( t ) + w ( t ) + u ( t ) , [1] where x ( t ) is the lateral error, and Eq. 1 relates the future error x ( t + 1) with the previous error x ( t ) , the uncertain t y w ( t ) (bumps and trail changes), and the con trol action u ( t ) . In the brain, the con trol action u ( t ) is generated from many sources: 1) sensory information arising from visual inputs, propriocep- tion from stretch receptors in muscles and acceleration from v estibular organs in the inner ear; 2) communication pathw a ys through sensory and motor nerves; 3) computation in the cen tral nervous system, including the spinal cord, cereb ellum and cerebral cortex; and 4) actuation by muscles in the eyes and arms. This simple mo del captures the bicycle dynamics and con- troller structures in the process and constraints that generate u ( t ) . This is not an all-encompassing mo del of all the biome- c hanics ( e.g. m uscle mechanical properties, vesticulo-ocular reflex gain adjustment) and con trol lo ops ( e.g. physiological reflex lo ops) that are inv olved in mountain bike riding. Rather, it abstracts out the comp onent delay and data rate, which are explained b elow, and consider the fundamental tradeoffs induced b y these constraints in system p erformance. This abstraction allows us to fo cus on the mechanism to exploit div ersit y , which we b elieve is univ ersal but has heretofore b een ignored. Our approach, which is commonly used to tease apart the complexit y of biological systems, do es not deny the A Theoretical system SA Ts � � � 8 Delay (s) Total error Delay error Rate error L _ _ __ � d Rate (bits p e r un it ti m e) B Experimental system SA Ts � � � 8 Delay error Delay (s) tal error Rate (bits p e r un it ti m e) Rate error Fig. 5. System SA Ts in the biking task. (A) Theoretical SA Ts. The delay error max(0 , T ) (blue), rate error (2 R − 1) − 1 (red), and the total error max(0 , T ) + (2 R − 1) − 1 (blac k) in Eq. 4 are shown with v arying component signaling delay T s and rate R subject to the component SA T T = ( R − 5) / 20 . (B) Empirical SA Ts. The error under an added delay (blue), the error under added quantization (red), and the error under added delay ed plus quantization (blac k) are shown. In the last case, the added delay T and quantization rate R subject to the component SA T T = ( R − 5) / 20 . The dot shows the averaged error of 4 subjects , and the shadowed area indicates the standard error of the mean f or these subjects. existence of the underlying complexity but will isolate each comp onen t from the complexity in order to nail do wn the scien tific hypothesis worth y of further inv estigation. In the exp eriment, these are programmed by the softw are and can b e made to b e arbitrarily hard. The feedback lo op from sensor measuremen t x ( t ) to control action u ( t ) has a latency of T u := T s + T i with a signaling rate R , where T s mo dels the nerve signaling delay , T i mo dels other internal delays in the feedbac k control lo op (including b oth sensory and motor delays), and R is the maximum rate at which axons can transmit information. The feedforward lo op from disturbance w ( t ) to the con trol action u ( t ) has an adv anced warning of T a . Adv anced warning o ccurs when 4 | www .pnas.org/cgi/doi/10.1073/pnas .XXXXXXXXXX DRAFT bik ers view the future trail tra jectory T a steps ahead, b efore it influences the error dynamics, which allows predictions to b e made and muscle tone c hanges to o ccur ahead of time ( 15 , 16 ). The v alue of T a dep ends on the sp eed of the rider and the features on the trail. The delay from the moment the error dynamics are impacted b y a disturbance to the moment the control acts against the disturbance is the latency minus w arning, i.e. T := T u − T a = T s + T i − T a . The list of notations is shown in T able 1 . Comp onent SA T s. Next, w e characterize the trade-off b e- t ween nerv e signaling delay and rate limit arising from the fixed spatial and metabolic cost to build and main tain ax- ons ( 2 , 3 , 17 , 18 ). Sp ecifically , nerves with the same cross- sectional area can either contain many small axons or a few large axons (Fig. 2 ), whic h inevitably leads to SA T s in neural signaling. The sp ecific forms of SA T s dep end on how the nerv es enco de information ( 19 – 22 ), and a wide range of time-based and rate-based co des are found throughout brains ( 23 ). In the spike-based enco ding sc heme, information is enco ded in the presence or absence of a spike within each time interv al, analogous to digital pack et-switc hing netw orks ( 20 , 24 ). F or example, spik e-based coding is found in many sub cortical structures, such as spatial lo calization in the auditory system enco ded as time delay b et w een the t w o ears ( 25 ), and spike timing in the cerebral cortex regulates synaptic plasticity ( 26 ). It has also been observed that man y types of neurons can generate spikes with accurate timing ( 19 , 22 ), which is typically required in spike-based or time-based co des. Assuming all axons hav e the same size, the comp onent SA T s can b e shown to satisfy R = λT s , [2] where R > 0 is measured by bits per unit time, T s > 0 is measured in unit time, and R and T s should use an iden tical time unit. The constant λ ( > 0) is prop ortional to the spatial and metab olic resources required to build and maitain the axons. In rate-based enco ding, the SA T s is approximated using the information capacity of a communication c hannel of P oisson type: R = 1 2 λT , [3] where R , T , and λ are the same v ariables as in Eq. 2 . The v alue of λ dep ends on the nerv e. F or example, proprioceptive nerv es often ha v e large λ , whic h allows low er latency with higher data rate compared with unmy elinated pain fib ers, whic h are slow but hav e a high signaling rate. F or a fixed resource level λ , the same rate R can b e ac hiev ed with half of the delay using spike-based enco ding than with (less efficien t) rate-based enco ding. Eqs. 2 and 3 c haracterize the amount of information that can b e transmitted within the latency requirements for control and are deriv ed as follo ws. First, the space and energy to build and maintain nerves, quantified by λ , are translated in to the size vs. num ber tradeoff for axons. Next, the size vs. num ber tradeoff is conv erted into the latency and rate tradeoffs. Here, the sp eed at which an action p oten tial tra v els dep ends on the axon size and the maximum firing rate dep ends on the metab olic energy that is av ailable. These constraints, together with assumptions on how the information is enco ded, determine the maximum signaling rates. A detailed deriv ation is giv en in the supplemen tary material. Our approac h is differen t from the approach that uses asymptotic information theory to c haracterize the amount of information that can be transmitted without considering latencies. Note that the system performance limits of our mo del do not require the comp onent SA T s to take the forms given in Eqs. 2 and 3 . Comp onent SA T s differ by enco ding schemes and the presence or absence of my elination, noise and redundancy , and cross-talk b et w een axons. Although w e use the SA T s in Eq. 2 here, similar analysis can b e p erformed for other comp onen t SA T s. System SA T s. When performing sensorimotor control, the comp onen t-lev el SA T s constrain the system-level SA T s. T o c haracterize this relation, we first use robust control to ols to find the errors as functions of the comp onen t-lev el signaling dela ys and rates in b oth deterministic and sto chastic settings. The w orst-case framew ork is suitable for modeling risk- a v erse sensorimotor behaviors, such as riding a mountain bike on a trail in the presence of the life-threatening uncertain t y is l ( 27 – 30 ). When the disturbance is bounded in infinity norm, the worst-case error normalized by the size of the disturbance satisfies sup k w k ∞ ≤ 1 k x k ∞ ≥ max (0 , T ) + 2 R − 1 − 1 . [4] This error sup k w k ∞ ≤ 1 k x k ∞ = sup {k x k ∞ / k w k ∞ } captures the ratio of amplification or attenuation in w orst-case error p er unit size disturbance in worst case. This ratio can b e used with differen t units. F or example, if the sampling interv al for control is τ seconds, then T has a unit of sampling interv als, and R has a unit of bits p er sampling interv al. If the disturbance has a size of W cm p er second, then the disturbance has size | w ( t ) | ≤ τ W cm at each sampling in terv al, and the error is bounded by max (0 , T ) + 2 R − 1 − 1 . Eq. 4 also applies when there is feedbac k, when the controller senses x , and feedforw ard control, when the controller senses w . The a v erage-case framew ork is more applicable to risk- neutral sensorimotor b ehaviors, such as riding a mountain bik e across a broad field, where fatal risk is minimal ( 31 , 32 ). The precise formulations of the con trol problem for b oth cases are giv en in the supplementary material. When the disturbance has zero mean and bounded v ariance, the steady-state mean squared error normalized b y error v ariance satisfies sup E [ w ]=0 ,v ar ( w )=1 E [ x 2 ] ≥ max(0 , T ) + 2 2 R − 1 − 1 . [5] This error E [ x 2 ] = E [ w 2 ] This error captures the ratio of amplification or attenuation in av erage error p er unit v ariance in disturbance. The error bounds in b oth cases (Eq. 4 – 5 ) are qualitatively similar: b oth b ounds decomp ose into tw o terms. The shared first term, max (0 , T ) , only dep ends on the total delay and thus can b e considered as the delay error. The other terms, (2 R − 1) − 1 and (2 2 R − 1) − 1 , dep end only on the signaling rate and can b e considered the rate error. Here, the units of the delay and rate errors are based on con trol, which are measures of system p erformance, rather than time or information measures ( e.g. bits), which are the units used in the signaling delay and rate at the component level. This decomp osition of errors is consisten t with the exp er- imen tal observ ation that the error for the trials with both PNAS | May 4, 2021 | v ol. XXX | no. XX | 5 DRAFT added delay and added quantization was approximately the sum of the errors for the trials with the delay and the quanti- zation added separately (Fig 5B , see Materials and Metho ds for details). The delay error, the rate error, and the total error in the exp eriment contain the internal errors of the sub jects’ sensorimotor control system in addition to the error caused by added delay , the error caused by added quantization, and the error caused by added dela y and quantization, resp ectively . Therefore, the total error equals the sum of delay error (error due to added delay plus internal error) and rate error (error due to added quantization plus internal error) min us internal error. When the error due to added delay and quan tization v anishes to zero, the dela y and rate error approximately equals the internal error, and the total error conv erges to the delay and rate error because the delay and rate error (approximately the internal error) plus the rate and delay error minus the in ternal error (appro ximately the dela y and rate error). Be- y ond the w orst case framework described ab ov e, the same conclusion holds for the sto c hastic setting (exp eriment and results are in section 4 of the supplementary material). W e are no w ready to characterize how the SA T s at the com- p onen t level impact the SA T s at the system lev el. Combining the component SA T s in Eq. 2 for spike-based enco ding, the error b ound of Eq. 4 in the w orst case, and T = T s + T i − T a , w e obtain the system SA T s (the influence of the neural sig- naling constraints on sensorimotor control) in Fig. 5A . Here, a similar analysis can also b e p erformed with other forms of comp onen t SA T s (enco ding schemes) or with the error bound of Eq. 5 in the av erage case. Increasing the delay in the feedbac k lo op increases the delay errors, while increasing the rate leads to a large decrease in the rate errors. Th us, delays can cause small disturbances to escalate into larger errors, and increasing the rate reduces errors exp onentially in the context of control. These prop erties of the fundamental limits hold for rate constraints imp osed on the sensing, communication, and actuation units. Intuitiv ely , actuation quantization giv es errors in control, whereas sensor and communication quantization gives errors in state estimate, whic h in turn leads to equal-sized errors in control. Ho w ev er, this condition may not hold if feedforward/predictiv e con trol is used to compensate for the same set of disturbances. The minimum error is ac hiev ed when the deleterious effects of the nerve signaling delay and inaccuracy are b oth con trolled within a mo derate range. Thus, b oth the nerve composition that minimizes the delay of nerve signaling and the com- p osition that maximizes its rate work together, resulting in sub optimal p erformance. In particular, choosing comp onents that optimize the signaling rate, which is often done in mo dels based on asymptotic information theory , may lead to large dela ys and less robust sensorimotor con trol. When resources are limited, optimization must balance the impacts of both signaling delay and signaling rate. The consequences of this trade-off are explored in the Discussion. Oculomotor control for visual tracking. W e now apply our the- ory to the lay ered con trol arc hitectures for visual ob ject track- ing. The visual tracking of a moving ob ject by smo oth pursuit in volv es tw o ma jor con trol loops: a fast feedforward V OR lo op that comp ensates for head motion and a slow er visual feedbac k lo op through the visual cortex (Fig. 1B ) ( 11 , 12 ). The vestibular inputs pro ject to b oth the vestibular nucleus and the cereb ellar cortex, which in turn pro jects back to the A Optimal worst-case errors and their compositions f or varying net delay and net warning B Optimal total delays , signaling delays and r ates f or varying net delay and net warning Fig. 6. Delayed reaction versus adv anced planning for visual trac king. (A) The minimum total error Eq. 4 subject to the component SA Ts in Eq. 2 and its composition (the delay error and the rate error) are shown f or varying net delay T i − T a ( ≥ 0) or net warning T a − T i ( ≥ 0) . (B) The optimal signaling dela y T s , total delay T (:= T s + T i − T a ) , and rate R for v arying net delay or net warning. In both A and B, the resource to build and maintain axons are assumed to be fixed and are set to λ = 0 . 1 . v estibular n ucleus. This feedbac k lo op from the cereb ellar cortex is imp ortant for tuning the gain of the feedforw ard path w a y to the vestibular n ucleus. This tuning allows adapta- tion to the growth in head size during developmen t and optical gain changes from new eyeglasses. The cereb ellar inputs also correct the gain for changes in fixation distance and torsional head mov emen ts ( 13 , 33 ). Drifts across the retina due to unmatc hed gains are comp ensated by the visual system, which main tains vernier hyperacuity in the arcsecond range (2% of the diameter of a cone photoreceptor in the fov ea) for images drifting up to 3 ◦ /sec ( 34 ). F rom a control p ersp ectiv e, an imp ortant difference b et w een the tw o loops is their levels of adv anced warning. The V OR lo op reacts rapidly after the head mo v es. W e call this regime the delaye d r e action of the VOR lo op, in which the uncertaint y w ( t ) b ecomes accessible to the controller after w ( t ) affects the error dynamics, giving rise to positive net delay T i − T a ≥ 0 . In biking, vision allows looking ahead down the trail, which translates in to a net adv anced w arning with enough lo ok ahead. But in VOR, this do esn’t happ en. In contrast, changes in the visual environmen t are highly predictable, so the visual loop can plan ey e mo v emen ts in adv ance, a negativ e net delay . W e call this regime the advanc e d planning of the visual loop, in whic h the uncertaint y w ( t ) b ecomes accessible to the con troller b efor e w ( t ) affects the error dynamics, giving rise to p ositiv e net warning T a − T i ≥ 0 (negativ e net delay). These t w o regimes are qualitatively differen t in their optimal choice of T s and R for achieving the optimal robust p erformance, as illustrated in Fig. 6 . 6 | www .pnas.org/cgi/doi/10.1073/pnas .XXXXXXXXXX DRAF T (i) Delaye d r e action: When the net delay T i − T a > 0 is large, the total error can be m uc h larger than the size of the uncertaint y k w k ∞ and go es to infinity as T i → ∞ . This large error amplification is consistent with the all-to o-familiar observ ation that ev en a small bump on a trail can cause a cyclist to lose control of the bike and crash. As T i increases, the delay error increasingly dominates the total error. Since the delay error largely contributes to the total error, the total error is minimized when T s is set to b e small in return for small R . Therefore, a feedback lo op in this regime p erforms b etter when it is built from a few large axons. Interestingly , the flat optimal delay/rate within the delay ed reaction regime suggests that optimal p erformance can b e achiev ed using one type of nerv e comp osition for a broad range of adv anced warnings. This prop erty is b eneficial b ecause the net delay (defined from adv anced w arning) differs across different sensorimotor tasks. (ii) A dvanc e d planning: When the net warning T a − T i > 0 is large, the total error approaches zero as R → ∞ . This large disturbance attenuation is consistent with the observ ation that a cyclist can av oid obstacles given enough time to plan a resp onse, such as taking a path around them or bracing against their impact. Given sufficiently large adv anced warning T a , the rate error increasingly dominates the total error b ecause the growth in T s incurs no additional delay error. Since the rate error contributes largely to the total error, the total error is minimized when the signaling rate R is set to be large at the exp ense of large signaling dela y T s . Therefore, a feedback lo op in this regime p erforms b etter when it is built from many small axons. This prediction is qualitatively consistent with the anatomy of the h uman oculomotor system (Fig. 2 ). The vestibular nerv e, which transmits three-dimensional velocity information from the inner ear to the vestibular nucleus in the brainstem, has 20 , 000 axons with a mean diameter 3 µm and co efficient of v ariation 0 . 4 µm . These fast axons allow feedforward ey e m uscle control with a delay of approximately 10 ms dela y ( 21 ). In contrast, the optic nerve carrying visual signals from the retina has appro ximately 1 million axons with a mean diameter 0 . 6 µm and co efficient of v ariation 0 . 5 µm , significantly smaller but more numerous and with greater v ariabilit y ( 2 , 3 ). The optic nerve pro jects to the cortex through the thalamus, where visual signals are sequentially pro cessed in several cortical areas b efore projecting bac k to sub cortical structures that control ey e mo v emen ts. As a consequence of this long lo op, the visual feedbac k delay is approximately 100 ms. The reader is in vited to p erform an exp erimen t to illustrate the consequences of la y ering in the oculomotor system. La y ering diversit y can b e observed by trac king your hand mo ving left and right across the visual field with increasing frequency while holding the head still and comparing this with shaking the head bac k and forth (in a ’no’ pattern) at an increasing frequency while holding the hand still. The hand starts to blur due to delays in visual ob ject tracking at around 1-2 Hertz, whereas blurring due to the inability to comp ensate for fast head motion occurs at frequencies ab ov e 20 Hz. The difference is that the visual lo op has low er levels of tolerable dela ys than the VOR lo op. How ev er, though slow er, the visual lo op is more accurate. Although b oth the VOR and visual lay ers ha v e hard lim- its in speeds and accuracies individually , the limits do not translate into ‘inaccurate’ or ’slow’ con trol at the system level A Optimal delays and r ates for v arying advanced warning B Optimal worst-case errors f or varying advanced warning Fig. 7. Planning and reflex layers f or lateral control in trail f ollowing. (A) The optimal delays and r ates for system perf ormance Eq. 6 subject to the component SA Ts of the refle x la yer R h = λ h T h where the delay in the refle x la yer T i = 10 , and the planning lay er R ` = λ ` T ` when the lev els of adv ance warning T a are varied from 1 to 20. We set λ h = λ ` = 0 . 1 for the tw o lay ers. (B) Minimum error Eq. 6 for the case when the high-la y er and low-la yer are allo wed to use components with diverse dela y and rate or unif orm delay and rate . The delays and rates in the diverse case do not hav e to be identical for both la yers , whereas they are constrained to be identical in the uniform case, i.e. R ` = R h and T ` = T h . In the diverse case, the high-lay er controller can better e xploit the advanced w arning to minimize errors than in the uniform case. b ecause each lay er is design to exploit the structures of the pro- cess to b e implemen ted in that lay er. Sp ecifically , the limited signaling rate of the VOR lo op does not compromise stabi- lization against head motions b ecause this loop only requires three-dimensional velocity information in control. The visual feedbac k lo op exploits the predictability in the visual en viron- men t to mitigate the latency in visual information processing. A separation of these tw o lo ops allows stabilization of head motion with a lo w er-dimensional v elocity signal and visual ob ject motion typically pro vides a large adv anced warning. The b enefits of diversit y b etw een lay ers are visualized in Fig. 8A , which compares the system SA T s when the VOR and visual lay ers use diverse delays and rates with a case when the delays and rates are uniform. Given the same amount of resources to build and maintain axons, the p erformance is more robust in the diverse case. This case study suggests an inaccurate but fast visual track- ing lay er and a slow er but accurate VOR lay er jointly create a virtual eye con troller which is both fast and accurate. Al- though the comp onent SA T imp oses system trade-offs b etw een minimizing the delay errors or rate errors in sensorimotor con- trol, diversit y deconstrains severe system SA T s b y using a slo wer but more accurate higher visual la y er to reduce the PNAS | May 4, 2021 | v ol. XXX | no. XX | 7 DRAFT rate cost and an inaccurate but faster lo w er reflex lay er to reduce the delay cost. W e call this diversity-enable d swe et sp ots (DESSs): i.e. the diversit y b et w een different lay ers helps ac hiev e b oth fast and accurate sensorimotor con trol despite the slo wness or inaccuracy of individual la y ers. Sweet sp ots are in regions near the origin where dela y errors and rate errors are b oth minimized. There are others lay ers in the o culomotor system. F or rapid saccadic responses to planned targets, the lo cation from retinal sensors project directly to the sup erior colliculus, from whic h saccades are launched. F or targeting a mo ving stimulus, p eripheral retinal inputs hav e lo w er latencies than in the fov ea. Visual and vestibular feedbac ks for balancing. Analogous DESSs can also b e observed in the control processes used to balance unstable biking dynamics. Balancing uses a lay ered arc hitecture inv olving visual, vestibular, and proprioceptive con trol lo ops. The developmen t of the control system for balance b egins in children 6 to 18 mon ths old and is further enhanced with practice for more complex tasks such as bik- ing. Visual, v estibular, and proprio ceptive lo ops ha v e diverse sp eeds and information rates, which complement eac h other to pro duce robust p erformance in balancing. Balancing with one leg is easy with normal visual and v estibular systems, and significant loss of balance with eyes closed often indicates proprio ceptiv e or cerebellar injury . Standing on one leg is also harder with eyes closed than with eyes op en b ecause the v estibular lo op without vision do es not ha v e access to the accu- rate information from the visual lo op. Spinning or alcohol (or drugs) temp orarily disrupt the vestibular con trol and increase the difficulty of standing in one leg. Unilateral or bilateral v estibular loss is also known to compromise the robustness of balancing and p osture control ( 35 , 36 ). Lateral control in trail f ollowing. DESSs can also b e observed in the lay ered control architecture used for lateral con trol in moun tain biking. Planning loops at a high la y er of visual pro cessing in the cortex and basal ganglia track the trail. Spinal feedforward control comp ensates for large bumps and feedbac k comp ensates for small bumps, disturbances that are difficult to see. Belo w and ab ov e these tw o la y ers, a lo w er la y er regulates m uscle stiffness in anticipation of future bumps, and higher lay ers make cognitive decisions that are strategic. Here, we focus on the visual planning and reflex lay ers in the con text of robust con trol and comp onent diversit y . T o understand this mec hanism, we use biking experiments (Fig. 3 ) to simulate the lateral con trol in the mountain biking when the impact due to head and b o dy mov emen ts are negli- gible. The lateral error dynamics is given by Eq. 1 , where x ( t ) is the error, w ( t ) is the disturbance, and u ( t ) is the control action. The disturbance w ( t ) = b ( t ) + r ( t ) contains the signal b ( t ) caused by the bumps on the ground and the signal r ( t ) due to the curv ature of the trail. W e assume that ratio of the size of b ( t ) to the size of r ( t ) is some > 0 . The control action u ( t ) = u ` ( t ) + u h ( t ) is generated by u ` ( t ) from the reflex loop and u h ( t ) from the planning lo op. The reflex lo op (denote b y L ) comp ensates for bumps using reflex at a low er-la y er, and the planning lo op (denoted by H ) tracks the trail at a higher-la y er. There are sp eed and accuracy constraints in each control lo op. W e assume that the reflex lo op can transmit signals from sensory to motor units with a signaling rate R ` and total dela y T ` + T i , where T ` mo dels the signaling delay , T i aggregates other in ternal delays, and R ` and T ` are subject to a comp onent SA T R ` = λ ` T ` . The planning lo op has a signaling rate R h and total dela y T h − T a , where T h mo dels the signaling delay , T a is the adv anced w arning, and R h and T h are sub ject to a comp onent SA T R h = λ h T h . The difference in their level of internal delay or adv anced warning comes from the fact that the control resp onse to trail curv ature can b e planned in adv ance by viewing the trail ahead, whereas the bumps are often con trolled after a cyclist senses its impact. With sufficiently large adv anced warning T a ( > T h ) , the state-deviation sup k b k ∞ ≤ , k r k ∞ ≤ 1 k x k ∞ is low er-bounded by n T ` + T i + 1 2 R ` − 1 o + 1 2 R h − 1 . [6] Here, the rates ( R ` , R h ) are the information capacity used b y the subtasks in individual lay ers, but do not include the information capacity used for other tasks or homeostasis. This lo w er b ound is tight in the sense that a con troller exists that ac hiev es this b ound. Analogous to the case of Eq. 4 , the p erfor- mance b ound in Eq. 6 holds regardless of whether the planning and reflex lay ers hav e feedbac k or feedforward structures. Note that the ov erall lo w er-b ound for the error is the sum of the errors in the low er reflex lay er and the higher visual la y er. This prop erty is consisten t with exp erimental observ a- tions in Fig. 4 . This decomp osition holds when the bumps b and trail changes r are indep enden t and small enough to b e indep enden tly controlled b y each la ye r (see Discussion for the situations when this assumption do es not hold). Under these assumptions, the feedbac k control system can b e decomposed in to t w o indep enden t subsystems that individually control the deleterious effects of b and r . One uses the feedbac k lo op L to control the error dynamics Eq. 1 with r ( t ) ≡ 0 , while the other uses the feedback loop H to control the error dynamics Eq. 1 with b ( t ) ≡ 0 . The separation of Eq. 6 into the individual errors caused b y tw o subsystems allows us to use the preceding insight to study the lay ered control architecture used in the biking tasks. The reflex feedback t ypically op erates in the regime of delay ed reaction, as reflexes often sense bumps only after the bik e has hit them. The planning feedback typically works in the regime of adv anced planning, since the tra jectory of the bik e and trail can often b e seen in adv ance. F rom Fig. 7A , the reflex feedback has the best p erformance with small signaling dela y at the exp ense of a lo w signaling rate. On the con trary , the planning feedback has the b est p erformance with a high signaling rate at the exp ense of a large signaling delay . This theoretical prediction on the relative delays of the t w o lay ers parallels the relativ e delays in bump only and trail only tasks observ ed in our exp eriment (see the supplementary material section 4.B) and comply with the existing literature ( 37 , 38 ). The resulting b enefit of div ersit y in dela ys and rates is illustrated in Fig. 7 , which shows the optimal comp onent comp osition (Fig. 7A ) and compares the system p erformances of the uniform and diverse cases (Fig. 7B ) when comp onent SA T s in Eq 2 are applied into the system performance in Eq. 6 . The relaxed system SA T s in the diverse case compared to the uniform case suggests that diversit y in the lay ered control arc hitecture helps improv e the fundamen tal p erformance limits arising from comp onen t SA T s (Fig. 8B ). When the appropriate div ersit y and la y ers do not exist, the disturbance is pro cessed b y a control lo op whose delay and rate are not optimized for 8 | www .pnas.org/cgi/doi/10.1073/pnas .XXXXXXXXXX DRAFT the sp ecifics of its access and the extent of adv anced warning. Th us, the uniform case is exp ected to hav e a larger error and w orse p erformance, as indicated by the limits in either of the t w o terms in Eq 6 , than by control lo ops with optimized delays and rates. The diversit y b et w een the t w o lay ers virtualizes the p erformance, allowing the o v erall system to exploit both predictiv e control and fast reflex to reduce errors. A System SA Ts f or visual object trac king B System SA Ts f or mountain biking Fig. 8. Diversity in the components (Diverse) impro ves performance compared with uniform components (Unif orm). In the diverse cases, both la yers are allowed to use heterogeneous signaling dela ys and rates. In uniform cases, they are constrained to be homogeneous. The horizontal axis shows the sum of the rate errors in both lay ers, and the v ertical axis shows the sum of the delay errors in both lay ers. For both the setting of visual object tracking and lateral control in trail tr acking, we can observe Diversity-Enab led Sweet Spots ( i.e. the diverse cases ha ve less stringent SA Ts in control than the uniform cases). (A) For visual object tr acking, w e used the component SA T R ` = 0 . 1 T ` for the refle x loop , and R h = 0 . 1 T h for the planning loop. The component SA Ts are converted into system SA Ts by Eq. 6 with parameters T i = 10 , T a = 10 , and = 1 . Although the plot is shown for specific lev els of net dela y and net warning, Fig. 6 suggest that, in the diverse case , the advantageous perf ormance holds over a broad r ange of net delay/w arning as the optimal signaling delay and r ate takes a constant v alue when the net dela y and net warning are in [ − 4 , 10] and [ − 10 , 4] , respectively . (B) F or the lateral control in trail tracking, w e used the component SA T R ` = 0 . 1 T ` for the refle x loop , and R h = 0 . 1 T h for the visual loop . The component SA Ts are conv er ted into system SA Ts by Eq. 6 with par ameters T i = 0 , T a = 100 , and = 1 . In the diverse case, the reflex la y er and the planning lay er are allow ed to use heterogeneous signaling delays and r ates, whereas in the unif orm case, they are constrained to be homogeneous. Discussion Our theoretical analysis of o culomotor control and biking sho wed that the deleterious effects of comp onen t delays and inaccuracies on con trol p erformance can b e mitigated by lay er- ing and div ersit y . Div ersity allows optimal trade-offs b etw een dela y error and rate error (Fig. 8 ). Comparisons with previous studies. A t the comp onen t level, reducing the energy needed for information transmission is often a ma jor concern ( 39 ). At the system level, fast, accurate, and robust control is important for surviv al ( 4 , 31 ). Here, w e consider the design ob jective of optimizing the robustness of sensorimotor control given limited biological resources in energy and space. Energy efficiency considers the signaling rate for a component as the design goal – maximizing information rate giv en a fixed energy budget – but in our framework, information transmission is only a means to the goal of efficient con trol. Optimal nerve c omp osition fr om a system p ersp e ctive. The difference in the tw o design goals leads to differen t conclusions for the optimal comp osition of nerves. F rom the comp onen t p erspective of maximizing information rate within the energy and resource budget, having man y small axons that send in- formation at the low est acceptable rate is desirable ( 2 ). F rom the system p erspective of achieving robust sensorimotor be- ha viors, balancing sp eed and accuracy in neural signaling is more imp ortan t since this minimizes the total control error due to dela ys and limited rates (Fig. 5 ). Conv ersely , max- imizing signaling rate may lead to large delays due to the comp onen t SA T s, which in turn degrade the robustness in sensorimotor control. These contrasting results reveal the fun- damen tal difference betw een optimizing comp onent prop erties and optimizing system performance. Enabling factors of r obust p erformanc e. Unlik e mo dels of sensorimotor con trol that abstract aw a y the comp onent sp eed and accuracy limits and assume they are negligible, our mo del explicitly incorp orates these constraints and their impact on system performance using robust netw ork ed control theory . Although b oth t ypes of mo dels can explain the empir- ical observ ation that comp onen t limits hav e minimal impact on sensorimotor p erformance, the factors that enable robust p erformance arise differently in the tw o mo dels. When the comp onent limits are negligible, to achiev e ro- bust p erformance only requires prop erly dealing with uncer- tain ties using the mechanisms such as sensorimotor adapta- tion, optimal feedback control, impedance control, predictive con trol, Ba y esian decision-making, and robust (risk-av erse) con trol ( 31 , 40 ). Ho w ev er, when comp onen t limits are not negligible, robust sensorimotor control additionally requires the mechanisms to successfully mitigate the comp onent hard limits through the use of effectiv e lay ered con trol architectures with appropriate div ersit y . In other words, ev en with a collec- tion of inexp ensive lay ers, which may b e slow or inaccurate, an effective lay ering can virtualize a fast and accurate con- trol resp onse. Such p erformance is achiev ed when the lay ers ha ve prop er diversit y to collectively span the heterogeneous requiremen ts needed for robustly p erforming a task (Fig. 8 ). Assumptions and limitations. W e approac hed mountain biking as a complex biological system by isolating each part of the complexit y in carefully designed exp erimen ts and drawing general conclusions that can then b e further tested. Our fo cus w as on the diversit y of comp onen ts and lay ers. W e c hose an exp erimen tal paradigm designed to separate this mec hanism from many others that might otherwise hav e obscured it. PNAS | May 4, 2021 | v ol. XXX | no. XX | 9 DRAFT Sensorimotor inte gr ation. In the biking task, the sub ject is stable in the chair, the bumps do not affect visual trail trac king, and the only motor output is the p osition of the wheel. In this simplified version of biking on a smo oth road in an ideal en vironmen t, we sho w ed that the errors due to trails and bumps are additive and that the closed-lo op p erformance b ound matc hed the empirical observ ations. Our basic mo del captures the essence of ho w comp onent limitations are decon- strained at the system level and is consistent with the results of our exp eriments and the prop erties of nerves. Our mo del can b e extended in several theoretical and exp erimental directions to b etter understand the control pro cesses and encompass a broader range of tasks. System dynamics. Ho w do dynamical system prop erties suc h as p oles and zeros change the relationship b etw een com- p onen t SA T s and the stability and p erformance of the whole system? The impact of delay in unstable systems may lead to oscillations, a qualitativ ely different regime from (marginally) stable systems. Such mo dels can b e used to mo del human stic k balancing, whose dynamics hav e unstable p oles and zeros. P ole balancing gets harder when the visual focus shifts tow ards the low er end of the stick. Disturb ances. What is the impact of sp ecific types of dis- turbances and their properties on system design? F or example, the low rotational inertia and low probabilit y of p erturbation of the orbit in oculomotor dynamics may explain why o culo- motor control can achiev e remarkable p erformance even with minimal proprio ception, which is essen tial in guiding limb mo v emen ts and achieving fast and accurate feedback control. Sensorimotor c ontr ol. What other influence do quanti- zation, dela y , saturation and other properties hav e on the p erformance of motor systems and sensorimotor integration? Comp onen t constrain ts can b e further refined by including the sp ecific roles they hav e in neural co ding and their functions in feedback and feedforward pathw ays ( 2 , 41 – 44 ). The mo del can b e extended to account for the constrain ts of the motor system (muscle strength, accuracy , sp eed, and fatigue) in the con text of reaching ( 10 ), throwing ( 45 ), and biking ( e.g. a strong biker is often able to recov er from a larger displacement than a weak er one). The impact of comp onent constraints on p erformance in the biking task can be studied for patien ts with motor disabilities, such as those with Parkinson’s disease, who may hav e disrupted sp eed and accuracy constrain ts in their control lo ops. Inter actions b etwe en layers and c ontr ol systems. When biking on a twist y , bumpy road, stabilizing against bumps and visual ob ject trac king is more complex. The VOR and internal feedbac k lo ops (particularly within the visual cortex) work together to stabilize vision despite bumps. In this situation, the errors from the tw o lay ers ma y not b e additive. Depending on the specifics of the low er lay er, the bumps ma y influence how w ell the higher lay er can sense and make decisions. Including the effects of bike dynamics on head and b o dy mov emen ts could reveal in teractions b et w een these controllers and lay ers. In our mo del, descending prediction errors from sensors w ere transferred to actuators to take adv antage of the av ailable signaling rate. This feedbac k resembles predictive co ding, whic h ma y explain the existence of massiv e feedback from higher cortical areas back to the primary sensory areas of cortex ( 41 , 46 ). The further in tegration of different control loops by match- ing con troller gains, information transmission and co ordination b et w een la y ers is a ma jor challenge. The cereb ellum collects proprio ceptiv e and efference copies of motor commands from the entire b o dy and manages gain adaptation while k eeping sensorimotor lo ops from interfering with eac h other ( 47 ). F or example, in the V OR circuit, vestibular inputs project to b oth the cerebellar cortex and the v estibular nucleus, and the cereb ellum in turn projects back to the v estibular n ucleus. The cereb ellum adjusts the gain of the feedforward lo op us- ing sensory prediction error signals from image slip in the retina during head mov emen ts ( 48 ). Gain is also mo dulated b y verging the eyes. In terestingly , during a vergence eye mov e- men t, the gain is reset b efore the ey es reac h the endp oint ( 13 , 33 ). F or head mov emen ts that are not horizon tal, the transformation to non-orthogonal eye muscles is even more complex. Co gnition. More lay ers that could b e added to our mo del include model-based prediction, memory , cortical represen- tations, alertness and attention, all of which influence com- putation and communication in the central nervous system. In tegrating these additional lay ers could lead to a b etter un- derstanding of how distributed con trol is achiev ed in brains. Connecting the SA T s in sensorimotor con trol and the SA T s in decision making will provide further insights into how control and cognitive pro cesses are optimally integrated. F actors that c ontribute to DESSs. In our mo dels of o culo- motor control and trail following, the higher lay er p erforms predictiv e planning and con trol and requires a higher data rate than the low er la y er. This is commonly found in engineering systems. F or example, a mo del predictive controller (MPC) or path planner at the higher lay er is combined with a PID or robust controller at the low er lay er. The optimality condition suggests that the low er lay er performs best at a fast time scale, while the higher lay er p erforms b est with higher data rates and pro cessing p ow er. Moreo v er, given an autonomous system that requires heavy computation in decision making, adding the reflex for fast resp onses can largely reduce the latency requiremen t of the higher lay er. Other factors that contribute to DESSs include division of lab or ( 49 ), hierarchical analysis of sensory input with different spatial and temp oral scales at each successive lay er, the div erse prop erties of the muscles and uncertainties that gov ern the con trol of subtasks in each lay er. Design c onsider ations b eyond SA T s. There are other w a ys to improv e system p erformance. One example is ov erarm thro wing, where moving the arm at high sp eeds leads to in- creased accuracy . Although m uscle noise increases with force in the normal op erating range, it drops at maximum strength. Other examples include the gy roscopic effect: biking transi- tions from unstable to stable dynamics as the velocity crosses a threshold; figure skate spinning is more stable at a faster sp eed (gyroscopic effect); hopping helps stabilize balance. This phe- nomenon could arise from a combination of factors: activ ating more lay ers; increased sensing sensitivity and actuation capa- bilit y due to larger motion amplitude; the use of oscillation to stabilize control; and the gyroscopic effect. Impro ving the fundamental performance limits. DESSs re- quire m ultiple lay ers with optimal and robust p olicies and div ersified hardw are within each lay er. The ov erall p erfor- mance of the lay ered system can improv e on the limits in each la y er. Below, w e discuss some of these improv emen ts. 10 | www .pnas.org/cgi/doi/10.1073/pnas .XXXXXXXXXX DRAFT Multiplexing motor systems and waterb e d effe cts. An appro- priate div ersit y of lay ers is needed so that essential tasks can b e efficien tly multiplexed and performed quic kly and accurately . There are many feedback lo ops in sensorimotor systems that can b e multiplexed ( 50 ). W e hav e examined ho w humans can m ultitask bike trail tracking and stabilizing against bumps (Fig. 1B , Fig. 4 ), but trail trac king while texting — not antic- ipated by evolution — leads to catastrophic crashes. Robust b eha vior is accomplished by a delib erate design that has sepa- rate lay ers of sensorimotor pathw a ys for each subtask. Multiplexing is a costly inv estmen t since building and main taining each lay er requires additional biological resources. Moreo v er, there are w aterbed-like effects in the sensitivit y of a system to disturbances: In feedback control, suppression in one frequency range necessarily increases disturbances in some other frequency range. This phenomena is captured in Bo de’s sensivitit y integral ( 51 , 52 ). Revisiting Bo de’s sensitivity inte- gral from the p erspective of lay ering and diversit y pro vides a complemen tary p ersp ectiv e of disturbance rejection ( 51 , 52 ). More generally , w aterbed-like effects can o ccur when designs optimized for one type of environmen t induce fragility in other t yp es. Thus, in the evolution of la y ered control architectures with a fixed resource budget, impro ving the capabilit y for one task may induce fragility in others. Identifying these hidden trade-offs and w aterbed-like effects could provide a new ev olutionary p ersp ectiv e on the organization of sensorimotor con trol in brains, effects that ha v e b een largely o v erlooked in most studies. Our framework for analyzing multila yer systems could provide explanations f or why some tasks share and others comp ete for resources. Cr oss-layer le arning and optimizing ar chite ctur es. DESSs can be achiev ed by decomp osing a new task into subtasks that are implemen ted in different lay ers. Eac h lay er has hard limits in speed, accuracy and flexibilit y in learning and control. Higher lay ers are often flexible but slow, whereas low er lay ers are faster but less flexible. Repetitive practice identifies and accum ulates evidence on p otential subtasks that do not require m uch flexibility and can be automated in lo w er lay ers with impro ved sp eed and accuracy . Learning how to efficien tly allo cate la y ers allows the system to b etter virtualize tasks to achiev e fast, accurate and flexible b ehaviors despite lay ers that are by themselves slow, inaccurate, or rigid. Sub optimal allo cations of lay ers can expose the hard limits of individual la y ers to p erformance b ottlenecks. This is illustrated in ov erarm thro wing. Beginners often use the cen tral nervous system to think ab out controlling the release of the ball, but highly-skilled play ers use feedforward con trol of finger force and stiffness to control the timing of release ( 45 ). F eedforward control is faster, more accurate and can rapidly adapt. This is possible because feedforw ard con trol op erates at a millisecond-lev el through the exceptional sensitivit y of force sensing, which greatly improv es throwing accuracy . F orce control has a muc h lo w er-dimensional design space for finger muscle stiffness. Low-dimensional rigid motion allo ws for fast adaptation to new targets and wind conditions. By shifting high-level control to a lo w er lay er, higher-lev el resources can b e redeploy ed for other tasks. Cross-la y er learning is qualitatively differen t from incremen- tally improving control parameters within a lay er. This type of learning happ ens on a muc h slow er time-scale and leads to abrupt changes in b ehavior. Because of these prop erties, cross-la yer learning is more difficult to observe and study in con trolled exp erimen ts. Our lay ered architecture could serv e as a starting point for dev eloping a theory for cross-lay er learning ( 53 ). DESS is a universal design principle. Div ersity is ‘the most ubiquitous rule’ in living systems’ ( 49 ). In this pap er, we studied the underlying mec hanisms through which diversit y in the delays and rates of sensing and signaling b etwe en lay ers impro ves control p erformance. Our companion paper shows that diversit y of comp onents within a lay er also b o osts p erfor- mance, and in particular that Fitts’ law for SA T s in reaching can b e explained by DESSs in m otor nerves ( 10 ). DESSs can also b e found in many other systems: Human com bines fast and slow decision-making pro cesses ( 54 , 55 ); The imm une system combines fast general responses with slo wer targeted resp onses ( 56 ); The smart grid combines pow er flow in a slow lay er and frequency control in a fast lay er; In ternet of Things (IoT) integrates cloud computing (which has high computing capability and are centralized) with edge computing (whic h can quickly resp ond to lo cal disturbances). Conclusions Our case studies are just the tip of the diversit y iceb erg through whic h diverse mechanisms in prediction, estimation, and ac- tuation within and b et w een lay ers b oost system p erformance. Understanding the design principles of lay ered architectures in biological systems, particularly those that achiev e DESSs in de- la y ed, quan tized, distributed, and lo calized con trol, can inspire the design of robust tec hnological systems, whic h increasingly face challenges similar to those encoun tered in h uman sensori- motor control. Design tools and engineering case studies, in turn, will help distill the design principles in biological systems that enable robust and flexible b eha viors through complex and heterogeneous neural mec hanisms. Materials and Methods W e developed a platform for biking games that simulate some asp ects of riding a moun tain bike ( 57 ). The platform is inex- p ensiv e and easy to implement. During the experiment, the sub ject lo ok ed at a PC monitor and turned a wheel to follo w the desired trajectory . The tra jectory had a constant velocity for each segmen t but abruptly switc hed b et w een right and left segments. The console for the biking task is sho wn in Fig. 3 . W e conducted exp eriments with four participan ts and recorded their biking tra jectories and lateral errors in control. T o study how la y ers m ultiplex, we compared the b ehav- iors when there are bumps in the road, curv ature in the trail and both. In the first task, the bumps w ere generated by pushing the steering wheel at a constant torque for 0 . 5 sec- ond. In the second task, the trail was generated with the angle θ ∈ { 10 ◦ , 20 ◦ , . . . , 80 ◦ } and alternated b etw een left and righ t with exponentially distributed time in terv als, so that the participants cannot anticipate the abrupt shifts without adv anced w arning in vision. In the last task, the bump and trail changes were generated indep enden tly according to the first tw o settings. A comparison of the error dynamics of the three tasks is sho wn in Fig. 4 . T o test of the impact of comp onen t SA T s, we compared the b ehaviors when steering wheel input acts on the p osition with delays, with quantizations, and b oth. The worst case PNAS | May 4, 2021 | v ol. XXX | no. XX | 11 DRAFT errors where measured in the three tasks. In the first task, the added delays were set to b e T = − 0 . 8 , − 0 . 6 , · · · , 0 . 2 , 0 . 4 seconds, where negative delays were realized b y adding an adv anced w arning in the visual input, and the p ositiv e delays w ere implemented by adding an external delay in actuation. In the second task, the rate of the quantizer was set to b e R = 1 , 2 , · · · , 7 bits p er unit time. In the third task, the delay and quantization were added according to the first and second settings, resp ectiv ely . In addition, the delay and rate are set to satisfy T = ( R − 5) / 20 , which sim ulates the comp onen t SA T in Eq. 2 . Eac h set of parameters lasted for 30 seconds b efore switc hing to a new set of parameters. The first 10 seconds of each 30 second trial were not used to measure the p erformance in order to eliminate switching and learning effects. Before each exp erimen t, subjects were trained until their p erformance stabilized. The errors b et w een the desired and actual tra jectory are sho wn in Fig. 5B . This plot suggests that the error caused by the added delay and quantization is the sum of the error caused by added quantization and the error caused by added delay , as suggested by the theoretical prediction Eq. 4 in the deterministic setting. W e also tested the av erage errors in an av erage-case framew ork (see Section 4 in the supplemen tary material). Particip ants . All participants ga v e informed consent. The study proto col num b er 19-0912 w as approv ed b y the Institu- tional Review Board at the California Institute of T ec hnology . Data availability. All data and programs used to analyze the data are av ailable at https://cnl.salk.edu/~terry/DESS- PNAS/. A CKNO WLEDGMENTS. This research was supp orted b y Na- tional Science F oundation (NCS-FO 1735004 and 1735003) and the Swartz F oundation. Q.L. was supp orted b y a Boswell fel lowship. This pap er is based on the theoretical do ctoral research of Y.N. and on the experimental research of Q.L. 1. Alderson DL, Doyle JC (2010) Contrasting Views of Complexity and Their Implications For Network-Centric Infrastructures. IEEE T ransactions on Systems, Man, and Cyber netics - Part A: Systems and Humans 40(4):839–852. 2. Laughlin SB, Sejnowski TJ (2003) Communication in neuronal networ ks. Science 301(5641):1870–1874. 3. Sterling P , Laughlin S (2015) Principles of neural design . (MIT Press). 4. Standage D, Wang DH, Heitz RP , Simen P (2015) T oward a unified view of the speed- accuracy trade-off. Frontiers in Neuroscience 9:139. 5. Do ya K, Ishii S, Pouget A, Rao RPN (2007) Bay esian brain: Probabilistic approaches to neural coding . (MIT press). 6. Chittka L, Sk orupski P , Raine NE (2009) Speed–accur acy tradeoffs in animal decision making. T rends in ecology & ev olution 24(7):400–407. 7. Card SK (2018) The psychology of human-computer interaction . (Crc Press). 8. Heitz RP , Schall JD (2013) Neural chronometry and coherency across speed–accuracy de- mands reveal lac k of homomor phism between computational and neural mechanisms of evi- dence accumulation. Philosophical T ransactions of the Roy al Society B: Biological Sciences 368(1628):20130071. 9. Sax ena S, Sarma SV , Dahleh M (2020) P erformance Limitations in Sensorimotor Control: T rade-Offs Between Neural Computation and Accuracy in T racking Fast Mov ements. Neural Computation 32(5):865–886. 10. Nakahira Y , Liu Q, Sejnowski T , Doyle JC (2000) Fitts’ Law for speed-accuracy trade-off is a diversity s weet spot in sensorimotor control. https://arxiv .org/submit/2714509 . 11. Lac S, Raymond JL, Sejnowski TJ, Lisberger SG (1995) Learning and memor y in the vestib ulo-ocular reflex. Annual review of neuroscience 18(1):409–441. 12. Lisberger SG (2010) Visual guidance of smooth-pursuit eye movements: sensation, action, and what happens in between. Neuron 66(4):477–491. 13. Coenen O, Sejnowski TJ (1995) A Dynamical Model of Context Dependencies for the V estibulo-Ocular Reflex in Advances in Neural Information Processing Systems , eds. T ouret- zky D , Mozer M, Hasselmo M. V ol. 8, pp. 89–95. 14. Lisberger SG (2015) Visual Guidance of Smooth Pursuit Eye Movements. Annual Revie w Visual Science 1:447–468. 15. Massion J (1992) Mo vement, posture and equilibrium: interaction and coordination. Progress in neurobiology 38(1):35–56. 16. Bouisset S, Do MC (2008) Posture, dynamic stability , and voluntar y movement. Neurophysi- ologie Clinique/Clinical Neurophysiology 38(6):345–362. 17. P erge JA, Koch K, Miller R, Sterling P , Balasubramanian V (2009) How the optic nerve allo- cates space, energy capacity , and information. Jour nal of Neuroscience 29(24):7917–7928. 18. P erge JA, Niven JE, Mugnaini E, Balasubramanian V , Ster ling P (2012) Why do axons differ in caliber? Jour nal of Neuroscience 32(2):626–638. 19. Mainen ZF , Sejnowski TJ (1995) Reliability of spike timing in neocortical neurons. Science 268(5216):1503–1506. 20. Salinas E, Sejno wski TJ (2001) Correlated neuronal activity and the flow of neural information. Nature reviews neuroscience 2(8):539. 21. Bodelon C, F allah M, Reynolds JH (2005) T emporal resolution of the human visual system for processing color , orientation, and color/orientation conjunctions. Journal of Vision 5(8):758. 22. F ox JL, Fairhall AL, Daniel TL (2010) Encoding properties of haltere neurons enable motion feature detection in a biological gyroscope. Proceedings of the National Academy of Sciences p. 200912548. 23. Riek e F , Warland D, de Ruyter van Steveninck R, W B (1997) Spikes: exploring the neural code . (MIT Press). 24. Srivasta va KH, et al. (2017) Motor control by precisely timed spike patter ns. Proceedings of the National Academy of Sciences 114(5):1171–1176. 25. Grothe B, Pec ka M, McAlpine D (2010) Mechanisms of Sound Localization in Mammals. Physiological Revie ws 90(3):983–1012. 26. Tiesinga P , Fellous JM, Sejnowski TJ (2008) Regulation of spike timing in visual cortical circuits. Nature revie ws neuroscience 9(2):97–107. 27. Whittle P (1990) Risk-sensitiv e optimal control. 28. Nagai H (1996) Bellman equations of risk-sensitive control. SIAM jour nal on control and optimization 34(1):74–101. 29. Sanger TD (2010) Neuro-mechanical control using differential stochastic operators in Engi- neering in Medicine and Biology Society (EMBC), 2010 Annual International Conf erence of the IEEE . (IEEE), pp. 4494–4497. 30. Sanger TD (2014) Risk-a ware control. Neural computation 26(12):2669–2691. 31. F ranklin DW , Wolper t DM (2011) Computational mechanisms of sensorimotor control. Neuron 72(3):425–442. 32. T odorov E, Jordan MI (2002) Optimal feedbac k control as a theor y of motor coordination. Nature neuroscience 5(11):1226–1235. 33. Snyder H, Lawrence DM, King WM (2010) Changes in the vestib ule-ocular reflex (VOR) an- ticipate changes in vergence angle in monk ey . Vision Research 33:569–575. 34. W estheimer G, P MS (1975) Visual acuity in the presence of retinal-image motion. J Opt Soc Am. 65(7):847–850. 35. Creath R, Kiemel T , Horak F , Jeka JJ (2002) Limited control strategies with the loss of vestib u- lar function. Experimental brain research 145(3):323–333. 36. Blac k FO, P eterka RJ, Shuper t CL, Nashner LM (1989) Eff ects of unilateral loss of v estibular function on the vestibulo-ocular reflex and postural control. Annals of Otology , Rhinology & Laryngology 98(11):884–889. 37. Roland PE, et al. (2006) Cor tical feedbac k depolarization waves: a mechanism of top- down influence on early visual areas. Proceedings of the National Academy of Sciences 103(33):12586–12591. 38. Matthe ws PBC (1991) The human stretch reflex and the motor cor tex. T rends in neuro- sciences 14(3):87–91. 39. Hasenstaub A, Otte S, Calla wa y E, Sejnowski TJ (2010) Metabolic cost as a unifying pr inciple governing neuronal biophysics. Proceedings of the National Academy of Sciences of the United States of America 107:12329—-12334. 40. Sanger TD (2010) Controlling v ariability. Jour nal of Motor Behavior 42(6):401–407. 41. Zhaoping L (2014) Understanding vision: theor y , models, and data . (Oxford Univ ersity Press). 42. Crapse TB, Sommer MA (2008) Corollar y discharge across the animal kingdom. Nature Revie ws Neuroscience 9(8):587–600. 43. Borst A, Theunissen FE (1999) Information theor y and neural coding. Nature neuroscience 2(11):947–957. 44. Sepulchre R, Drion G, F ranci A (2019) Control Across Scales by Positiv e and Negativ e F eed- back. Annual Review of Control, Robotics, and Autonomous Systems 2(1):89–113. 45. Hore J, W atts S (2011) Skilled throwers use physics to time ball release to the nearest mil- lisecond. Jour nal of Neurophysiology 106(4):2024–2033. 46. Muc kli L, Petro LS (2013) Network interactions: Non-geniculate input to V1. Current opinion in neurobiology 23(2):195–201. 47. Coenen O , Sejnowski TJ (1996) Learning to make predictions in the cerebellum ma y explain the anticipator y modulation of the vestib ulo-ocular reflex (V OR) gain with vergence in Pro- ceedings of the 3rd Joint Symposium on Neural Computation. University of California San Diego: Institute of Neural Computation . pp. 202–221. 48. Shadmehr R, Smith M, Krakauer J (2010) Error Correction, Sensor y Prediction, and Adapta- tion in Motor Control. Annu. Rev . Neurosci. 33:89–108. 49. György Buzsáki MD (2019) The brain from inside out . (Oxford University Press). 50. K och C, Tsuchiya N (2007) Attention and consciousness: two distinct brain processes. T rends in cognitive sciences 11(1):16–22. 51. F ang S, Chen J, Hideaki I (2017) T owards integrating control and information theories . (Springer). 52. Leong YP , Doyle JC (2017) Effects of delays, poles and zeros on time domain waterbed tradeoffs and oscillations. IEEE Control Systems Letters 1(1):122–127. 53. Sejnowski TJ (2020) The unreasonable eff ectiveness of deep learning in artificial intelligence. Proceedings of the National Academy of Sciences 48:30033–30038. 54. Kahneman D , Egan P (2011) Thinking, fast and slow . (F arrar , Straus and Giroux New Y ork) V ol. 1. 55. T r immer PC, et al. (2008) Mammalian choices: combining fast-b ut-inaccurate and slow-but- accurate decision-making systems. Proceedings of the Royal Society B: Biological Sciences 275(1649):2353–2361. 56. Smith AM (2018) Host-pathogen kinetics dur ing influenza infection and coinfection: insights from predictive modeling. Immunological reviews 285(1):97–112. 57. Liu Q, et al. (2020) WheelCon: A Wheel Control-Based Gaming Platf orm f or Studying Human Sensorimotor Control. Jour nal of Visualized Experiments . 12 | www .pnas.org/cgi/doi/10.1073/pnas .XXXXXXXXXX
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment