A Scalable Max-Consensus Protocol For Noisy Ultra-Dense Networks
We introduce \emph{ScalableMax}, a novel communication scheme for achieving max-consensus in a network of multiple agents which harnesses the interference in the wireless channel as well as its multicast capabilities. In a sufficiently dense network,…
Authors: Navneet Agrawal, Matthias Frey, Slawomir Stanczak
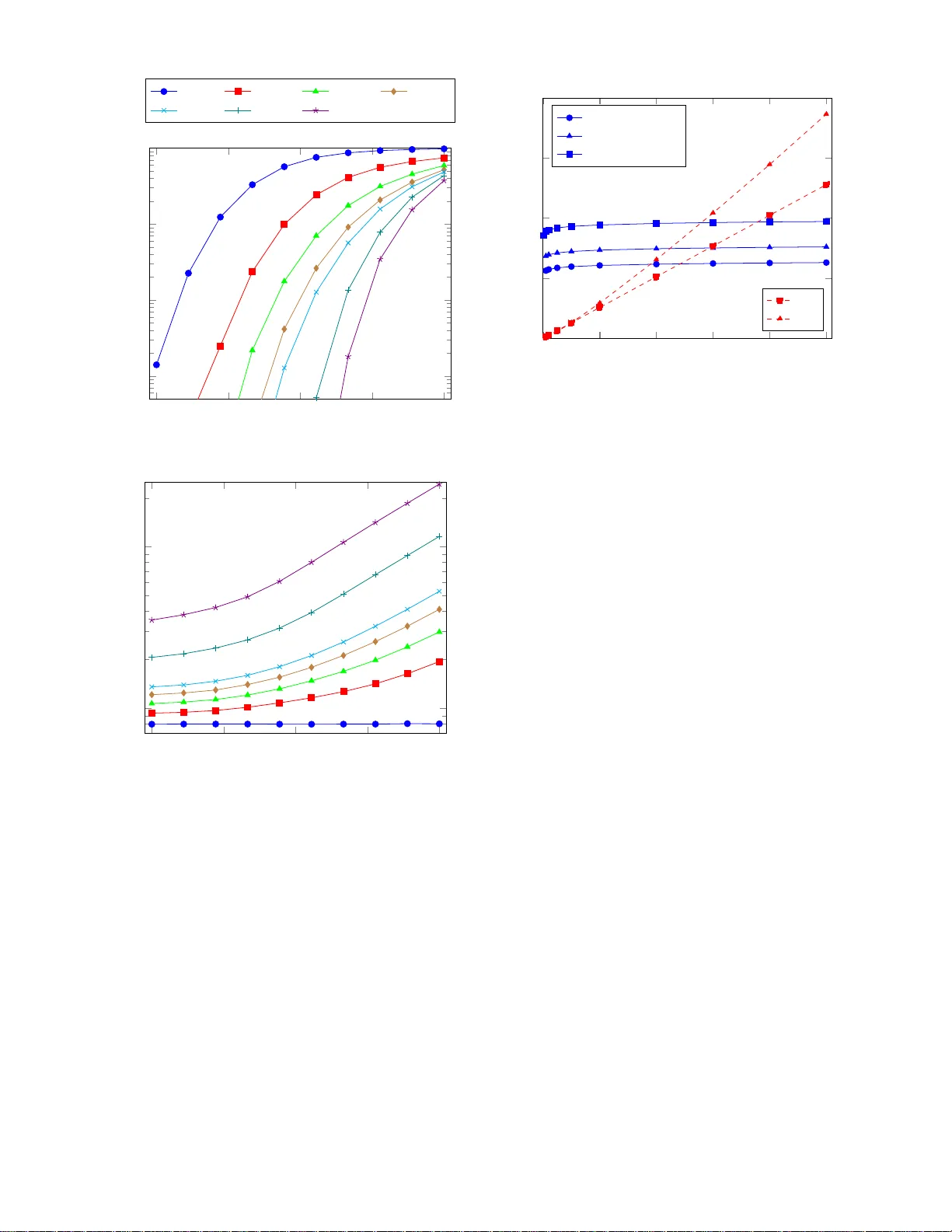
A Scalable Max-Consensu s Protocol F or Noisy Ultra-De nse Netw orks Navneet Agrawal ∗ † , Matthias Frey ∗ † and Sławomir Sta ´ nczak † ‡ † T echnisc h e Uni versit ¨ at Berlin, ‡ Fraunhofer Heinrich He rtz Ins titute Abstract —W e introduce ScalableMa x , a novel communication scheme fo r achieving max-consensus in a network of multiple agents which harnesses the interference in the wireless channel as well as its multicast capabilities. In a sufficiently dense network, the amount of communication resources r equired gro ws logarithmically with the n umber of nodes, whil e in state-of-the- art approaches, th is gro wth is at l east linear . S calableMax can handle additive n oise and works well in a high SNR regime. F or medium and low SNR, we propose the ScalableMax-EC scheme, which extends the ideas of ScalableMax by introducing a novel error correc tion scheme. It achiev es lower error rates at t h e cost of usin g more channel resources. Howev er , it preserv es the logarithmic gro wth with the number of agents i n the system. I . I N T RO D U C T I O N A N D P R I O R W O R K The prob lem o f achieving m ax-consen sus in a netw ork of agents arises in many curr ent and en visioned pra ctical appli- cations, particular ly in r egard to distributed an d coop erative control. Exam ples mo st n otably include task assignmen t [1], leader election [2], rendezvous [3], c lo ck syn chroniz a tion [ 4], spectrum sensing [5], distributed decision - making [6] and formation control [7]. Future gen erations of mob ile network s are anticipa ted to b e several ord ers of m agnitude de nser than today because o f expected infrastructu re densification [8]. Distributed an d coop e rativ e control of multiple age n ts in various ultra- dense n etworks will be a m a jor ch allenge. Therefo re th e g rowth in c o mplexity of consensu s alg orithms with the n umber of agen ts in the network co uld b ecome much more important tha n it is today . I n this work, we present max- consensus proto cols that are p ractical to implement in wireless commun ication systems and exh ibit a mo re fav orable asymp - totic co mplexity b ehavior th an state-of -the-art alternatives. Historically , max -consensus algorithm s are a n alyzed based on the pro perties of the co mmunica tio n network graph [9], [ 6], [10]. The exchan g e o f in formation between all neighb oring agents is assume d to happen simultaneo usly , with complexity indepen d ent of the nu mber of agents. Hence, these algorithms are designed to minimize the total num ber of informatio n exchanges r e q uired to re a ch consen sus. Howev er, in wireless networks, these assump tions are often un realistic due to the presence o f interference and noise. On th e other ha nd, the specific characte r istics of the wireless channel can be exploited This work was supported by the German Research Foundation (DFG) within their priority program SPP 1914 “Cyber-Physic al Networkin g” and by the German Federal Ministry of Education and Research under grant 16KIS0605. ∗ The first two authors contribut ed equally to this work. by m aking use of its b r oadcast and superposition pr oper- ties. Iutzeler et al. p roposed and analy zed three c o mmunica - tion stra tegies: Rando m-P airwise, Rand om-W alk and Rand o m- Br o adcast [11], [12]. They leverage the broadcast p roperty of the wireless chan nel, reduce interfer ence u sing random scheduling o f agents shar ing the same ch annel, and protect the transmitted messages using fo rward err or co rrection. T his leads to a linea r gr owth of co m munication r esources nec e ssary with the number o f agents. Altern ativ ely , the maxim um can be approx imated with linear fu n ctions and th us, linear consensus protoco ls can b e ap plied, e.g ., [ 1 3], [1 4], [1 0]. In [15], [16], [17], the superposition pro perty of the wireless chann el is harnessed to achiev e con stant com plexity in the number of agents in networks with bou nded diam eter . But these work s neither con sider noise intr o duced by th e approx imation of the maximum function nor by th e wireless channel. [18] proposes to u se a stochastic a pprox imation b ased algorithm to tackle the r esidual add itive n oise, but th e co n vergence rate is much slower tha n that of stan dard consen sus algorith ms. The m ain co ntributions of this work are (a) the introd uction of a n ovel max-co nsensus protocol that har nesses interferenc e to achieve logarithm ic cost while d ealing with additive noise, and (b) an er ror c o rrection mechan ism which improves pe r- forman ce in the low and med ium SNR regime. I I . N OTA T I O N W e den ote the sets of finite and infinite bin ary sequen c es with { 0 , 1 } < ∞ and { 0 , 1 } ∞ , respectively . Given S 1 , S 2 ∈ { 0 , 1 } < ∞ ∪ { 0 , 1 } ∞ , th ey are compatible , or S 1 || S 2 , if they coincide on the in te r section of their domains. S 1 is lexico- graphically gr eater than S 2 , or S 1 >S 2 , if there is k such that S 1 ( k ) > S 2 ( k ) , while for all k ′ < k , S 1 ( k ′ ) = S 2 ( k ′ ) . W e write S 1 ≥ S 2 if S 1 || S 2 or S 1 ( k ) > S 2 ( k ) . ∅ denotes the emp ty sequence. Given S ∈ { 0 , 1 } < ∞ and b ∈ { 0 , 1 } , S ⌢ b is the sequence that r e sults from appe n ding b at the en d of S . Finally , 1 den otes the indica tor fun ction and |·| the cardinality of a set. I I I . S Y S T E M M O D E L A N D P R O B L E M S TA T E M E N T A. Pr eliminaries A W ireless Mu ltiple Access Channel (WMA C) is a system with inputs α 1 , . . . , α n and output γ := P n k =1 h k α k + N , where α k ∈ C is th e sign al tran sm itted by transmitter k , th e complex r andom variable h k is the chan nel fading c oefficient of transm itter k , and th e com plex random variable N is the ad- ditiv e n oise at the receiv er . A multicast channel takes an input β ∈ C from a single transm itting nod e, and p roduces ou tputs Γ 1 , . . . , Γ n defined as Γ k = h k β + N k for k = 1 , . . . , n , where the comp lex rando m variables N k and h k represent the additive noise and the channel fading co efficient at receiver k , respectively . One channel use is defined as a realization of either a WMA C, a mu lticast or a p oint-to- p oint chan nel. Assumption 1 (Channel Assumption s) . W e a ssume that the inputs and ou tputs of the WMACs ar e r eal. Mor eover , the fading co efficients h 1 , . . . , h n ar e assumed to be determin - istically equal to 1 . The only assumptio n on the additive noise distribution is th at it is symmetric a r ou nd 0 . White G a ussian noise is on e example of such a no ise distribution. One way of ac c ommod a ting complex fading would be to add suitable pre - an d p o st-processing which cancels the fading coefficients up to a residu al n oise term. For an exam ple of how this can b e done e ven in case the fading coefficients are known n either at th e tr ansmitter no r at the receiver , we refer the read e r to [19] an d [ 15]. Multicast com m unication satisfying a rbitrarily low errors can be realized employing state-of-the- art coding schemes with fo rward error correc tio n. In the following, we assume that mu lticast transmission of binary sequences is possible without erro r . Con sider a wireless network defined by an u ndirected connected graph G = ( A , E ) . The nodes in A can comm unicate with each other th r ough channels represen ted by the edge s in E . Besides poin t-to- point comm unication along in dividual edge s, we also h arness the multicast and super position (WMA C) properties of the wireless ch annel. For simplicity , we start with co nsidering a star-shaped network top ology , i. e ., there is a centra l no de C ∈ A , the co or dinator , with lin ks to all other n odes in A . W e assum e that the commu nication between C and the oth er nodes is perfectly synchronized . In Section VII, we extend the propo sed solutions to general undire c ted connected wireless network graph s assuming some pr io r coordin ation. B. Pr ob lem Statemen t In this section, we d efine the general max - consensus prob- lem a n d simplify it to a relaxed version which can be solved more efficiently . Problem 1 (Max-co nsensus) . Each agent A k ∈ A ho lds an input S k ∈ S , wher e S is a finite totally order ed set. W e say that the system h as achieved m a x-consen sus if all agents agr ee on a commo n o utput S tha t is equal to th e maximu m of the inputs fr om a ll agents, i.e., S = max A k ∈A S k . The objective is to design p r otoco ls that can a chieve max-c onsensus with a minimum nu mber of cha nnel uses. W e can assume without loss of gen erality that S is a set of binar y sequenc es of a certain fixed length, equ ipped with lexicog raphic ord ering which coincid es with the usual orderin g on dyad ic ratio nals. For examp le, consider a Wireless Sensor Network where sensor nodes are sensing a ph ysical pheno m enon describ ed by a real n umber . Th e sensors, due to their lim ited sen sitivity , can o nly read th e value up to a quantized numb er , represented b y a finite sequen ce of bina r y digits. In the following, we assume that each agent ho lds an infinite-len gth b inary sequence , and that no two agen ts hold the same sequence. In practice, this can be achieved by concatenatin g as many unif ormly ran dom bits as r equired by the scheme a t the en d of any agent’ s finite inp ut sequ ence. I n the relaxed version o f the max -consensus p roblem, we seek to narrow d own th e set o f all agen ts to a smaller set whic h still contains th e agent holding th e maximu m input. Definition 1 ( W eak m - max-co n sensus) . Ea ch agent in A holds an inp u t sequence S k ∈ { 0 , 1 } ∞ , wher e no two inputs ar e the same. At an y point in time, the coordinator can terminate the scheme with a termination co ndition ϕ = ϕ ( x ) either o f the form ϕ ( x ) = x ≥ S or of the form ϕ ( x ) = x>S , wher e x is a free va riable an d S ∈ { 0 , 1 } < ∞ is called the coor dinato r’ s outpu t estimate. W e say th at th e termination is successful iff 1 ≤ |M| ≤ m , wher e M := { A k : ϕ ( S k ) } is the set of agents satisfying th e termination conditio n. Remark 1 (From weak m -max-co nsensus to max-consen sus) . Further steps are r equired after reaching a weak m -max- consensus to find the true ma ximum among th e r emaining set M of agents. As lo ng as m d oes n ot gr ow with the number of agents in the system, this r eduction can be achieved with a constant number o f channel uses thr oug h a series of po int- to-poin t an d/or multicast commu nications, e.g., emplo ying Rando m-P airwise or Rando m-Br oadcast [11], [12]. Remark 2 (Design ing m ) . The agent hold ing the true ma x- imum input sequen ce is guaranteed to be an element of M as lo n g as M 6 = ∅ . m is a d e sig nable parameter which do es not need to gr ow with the nu m b er o f agents in the system. The h ig her it is, the more we can harness the combined signal str ength of multiple transmitters to co mbat noise, but the mo r e communica tion r esources are n ecessary to simplify the max- consensus p r ob lem to weak m -ma x-consen su s. I V . S C A L A B L E M A X S C H E M E In this section , we propo se a scheme that achieves weak m -max-co nsensus a nd scales log arithmically with the nu mber of ag e n ts. The max -consensus pr o blem c a n be simplified to weak m -m ax-consen sus as pointed ou t in Remark 1. The coo rdinator starts the scheme and generates an outpu t estimate S ∈ { 0 , 1 } < ∞ based o n inform a tio n received from the ag e nts. In the following, we detail the c ommun ication protoco ls an d info rmation shared between agents an d the coordin ator . F or every po ssible co ordinato r outpu t estimate S , we d efine the set P S := { k : S k >S } o f p r otesting agents , the set A S := { k : S k ≥ S } of a ctive agents and the set R S := { k : S k ≥ S ⌢ 1 } of raising agents . The coor dinator uses noisy estimates o f the cardinalities of these sets in order to refine its output estimate. W e use an iteration cou nter t , where e a c h iteratio n consists of a tr ansmission of d igital info r mation throug h the multicast channel and three uses of the WMAC , and the r eby correspon d s to a constant numb e r of ch annel uses. Conce p tually , we th us split ev ery iter ation t into four time instants 4 t, . . . , 4 t + 3 . The coordin ator starts with S (0) := ∅ . At e very tim e instant of the form 4 t , it tran smits S ( t ) throug h the multicast channel. W e remark that sin c e S ( t ) differs f rom S ( t − 1 ) in at most one digit, it is sufficient to transm it only th e cha n ge, and h ence, the length o f the transmitted sequ ence can b e co nsidered constan t. At time in stan ts not d i visible by 4, the agen ts tr a nsmit throu gh the WMAC , the signal of each b eing either 1 or 0 , acc o rding to th e following scheme: time in stant step name sign al transmitted by A k 4 t + 1 protest 1 k ∈P S ( t ) 4 t + 2 activity 1 k ∈A S ( t ) 4 t + 3 raising 1 k ∈R S ( t ) W e den o te the signal transmitted b y agent A k at time instant t with α k ( t ) and th e cor r espondin g received signal γ ( t ) = P n k =1 α k ( t ) + N ( t ) . Th ese values are not d efined if t is divisible by 4 , since th e agents do not transmit in these steps. After step 4 t + 3 , the co ordinato r either determines a new outpu t estimate S ( t + 1) or it makes a termination decision accordin g to Fig. 1. In Fig. 2, we show a g raphical representatio n of par t of th e decision process. if γ (4 t + 1) > m/ 4 then T erminate with ϕ ( x ) = x>S ( t ) ; end if γ (4 t + 2) < 3 m/ 4 then T erminate with ϕ ( x ) = x ≥ S ( t ) ; end if γ (4 t + 3) < m/ 4 then S ( t + 1) ← S ( t ) ⌢ 0 ; else S ( t + 1) ← S ( t ) ⌢ 1 ; if γ (4 t + 3) < 3 m/ 4 then T erminate with ϕ ( x ) = x ≥ S ( t + 1 ) ; end end Fig. 1. Post-processing of recei ved s ignals in Scala bleMax. Theorem 1. S u ppose th at m is even. Then th e pr ob a bility that the Scala bleMax scheme termina tes successfully within d + 1 iterations is a t least P ( N ≤ m/ 4) 3( d +1) , wh er e N is the a dditive noise o f th e WMAC and d := min { ℓ ∈ N : ∀ S ∈ { 0 , 1 } ℓ |{ k : S k || S }| ≤ 1 } . Remark 3 . Th e maximum d escription length d is an impo rtant quantity for the p erformance of th e Sc alableMax scheme, but it is highly depen d ent on th e agents’ inpu ts and therefor e in general unkno wn. However , we c a n bo und it u nder assump- tions on the distribution of th e agents’ in p uts. S o for instance, if we assume the inputs a r e uniformly d istrib uted, we get P ( d ≥ d 0 ) = P _ n k 6 = k ′ =1 ^ d 0 ℓ =1 S k ( ℓ ) = S k ′ ( ℓ ) ≤ n ( n − 1) / 2 · (1 / 2 ) d 0 , γ (4 t + 2 ) (activity step) γ (4 t + 1 ) (p r otest step) (0 , 0 ) ( m, m ) (0 , m ) 1 2 3 4 4 Fig. 2. V isual ization of post-proce ssing at the coordinat or of recei ved signals γ (4 t + 1) and γ (4 t + 2) . Dashed lines show the possible noiseless combined signals and soli d li nes de limit t he numbered deci sion re gions. On ly in deci sion regi on 1 is γ (4 t + 3) taken into account, and the decision can be to append 0 or 1 to the output estimate , or to append 1 and terminat e with a ≥ condition. Recei ved signals in region 2 and 3 lead to terminati on w ith conditi ons ≥ and > , respect iv ely , with the current unmodified output estimat e. In ScalableMax, the regions marked 4 are part of regions 2 and 3, respecti vel y . In ScalableMax- EC, the y correspond to the coordinator removing the last digit from its current output estimate, thus correcting an error that m ay hav e been made in pre vious steps due to high noise. wher e the in e quality is due to the unio n bound . Elementary transformations yield that P ( d ≥ d 0 ) ≤ ε as long a s d 0 ≥ lo g 2 n + lo g 2 ( n − 1) + log 2 (1 /ε ) − 1 , so in th e ca se th at th e agents’ inputs ar e u niformly d istrib uted, the description length depen ds loga rithmically on n . In general, ac c or ding to our assumption s in Section III, ea ch of the agents’ inputs consists of finitely many , say p , arbitrary bits an d infinitely many u n iform bits. Then P ( d ≥ d 0 ) ≤ ε if d 0 ≥ p + log 2 n + lo g 2 ( n − 1) + log 2 (1 /ε ) − 1 . In ord e r to prove Th eorem 1, we introdu c e some ad ditional notation and ter minolog y . W e say that the system is in a good state if the output estimate S satisfies |P S | < m/ 2 an d |A S | ≥ m/ 2 . The region of potential signals to be received in the protest and activity steps pr ovid ed the system is in a good state is shad ed in Fig. 2. Note that if S is the empty seq uence, the state is good if there ar e at least m/ 2 ag e nts in th e system. W ith G t we den ote the e vent that the system is in a good state at step 4 t . With T t we denote the ev ent that the co ordinato r terminates the sche m e successfully at step 4 t , with ˜ T t we denote the event that the coordin ator ter minates the scheme unsuccessfully at step 4 t and with ˜ T ϕ t we deno te the event that the co o rdinator termin ates the scheme u nsuccessfully at step 4 t with output co n dition ϕ . Lemma 1. P ( G t +1 ∪ T t +1 | G t ) ≥ P ( N ≤ m/ 4) 3 . Pr o of. W e abbreviate the th ree possible termination cond itio ns at step 4 t with ϕ 1 ( x ) = x>S ( t ) , ϕ 2 ( x ) = x ≥ S ( t ) and ϕ 3 ( x ) = x ≥ S ( t + 1) an d bou nd the p robability as f ollows: P ( G t +1 ∪ T t +1 | G t ) ≥ P (( G t +1 ∪ T t +1 ) ∩ G t ) = 1 − P (( ˜ T ϕ 1 t +1 ∩ G t ) ∪ ( ˜ T ϕ 2 t +1 ∩ G t ) ∪ ( ˜ T ϕ 3 t +1 ∩ G t ) ∪ ( G t \ ( G t +1 ∪ T t +1 ∪ ˜ T t +1 ))) (1) ≥ 1 − P ( N (4 t + 2) > m/ 4 ∪ N (4 t + 3 ) < − m/ 4 ∪ N (4 t + 4) > m/ 4) (2) = P ( N (4 t + 2 ) ≤ m/ 4 ∩ N (4 t + 3 ) ≥ − m/ 4 ∩ N (4 t + 4) ≤ m/ 4) = P ( N ≤ m/ 4) 3 (3) Equality (1) is d ue to the o bservation that if neither G t +1 nor T t +1 occurs, at least one of the fo llowing events mu st occur: ˜ T ϕ 1 t +1 , ˜ T ϕ 2 t +1 , ˜ T ϕ 3 t +1 , Ω \ ( G t +1 ∪ T t +1 ∪ ˜ T t +1 ) . Inequa lity (2) is due to th e f o llowing im p lications am ong ev ents: • G t ∩ ˜ T ϕ 1 t +1 implies P S ( t ) = ∅ an d ther efore N (4 t + 2) > m/ 4 . • G t ∩ ˜ T ϕ 2 t +1 implies A S ( t ) > m and therefore N (4 t + 3) < − m/ 4 . • In order to analyze th e imp lications o f ( G t ∩ ˜ T ϕ 3 t +1 ) ∪ ( G t \ ( G t +1 ∪ T t +1 ∪ ˜ T t +1 )) , we distinguish th ree cases. First, we consider R S ( t ) = ∅ . In this case the event imp lies N (4 t + 4) > m/ 4 . Second , we consider 0 < |R S ( t ) | ≤ m/ 2 . In th is case, th e ev ent implies tha t 1 was ap pended to S but n o te r mination occurr e d and thus N (4 t + 4) > m/ 4 . Finally , we consider |R S ( t ) | > m . In this case, the ev ent im plies N (4 t + 4) < − m/ 4 . Due to the symm e tr y of the n o ise, w e can assum e th at in all three cases the ev ent imp lies N (4 t + 4) > m/ 4 for the sake of prob ability statements. Finally , equ ality ( 3) is due to the indep endence o f N (4 t + 2) , N (4 t + 3) and N (4 t + 4) . Pr o of of Theorem 1. W e observe that after 4( d + 1 ) steps, the scheme eith e r ter minates or it is in a bad state an d that by definition the scheme always starts in a g ood state (i.e. G 0 almost surely occurs), so we can boun d the prob a b ility of successful term in ation after a t mo st 4( d + 1) steps as P d +1 \ t =1 G t ∪ t [ t ′ =1 T t ′ !! = d +1 Y t =1 P ( G t ∪ T t | G t − 1 ) ≥ P ( N ≤ m/ 4) 3( d +1) , where the inequ a lity is due to Lemm a 1, obser ving th at condition ed u nder the pr evious state of the system, th e next step o f the scheme is inde penden t of th e p r evious steps. V . S C A L A B L E M A X - E C S C H E M E In th is section, we in troduce the ScalableMax-E C sch e me which expands upon the id eas of the previous section, intro- ducing error co rrection. W e achieve this with two main m od- ifications to th e Scalab leMax scheme. First, the c o ordina to r can n ow additio nally make co r rection decisions, i. e., re move a digit from its curr e nt o utput estimate S ( t ) . Second , in the cases in wh ich th e above scheme would termin a te, the coordin ator does no t do so immediately , but r ather raises a termin a tio n counter an d on ly te r minates whe n this coun te r reache s a termination th r eshold τ , which is a param e ter of the sch eme. For each cond ition cond ∈ { “ > ” , “ ≥ ” , “ appen d ” } and each possible output estimate S ∈ { 0 , 1 } < ∞ , the co ordinato r keeps a termination coun ter T ( S, co nd ) , which is initially 0 . Coordinato r and a gents commun icate as they do in the above scheme, but the p o st-processing in the coord inator af ter step 4 t +3 differs an d is con ducted accor ding to Fig. 3 . W e visualize a p a rt of this dec ision pro cess in Fig. 2. if γ (4 t + 1) > 3 m/ 4 then S ( t + 1) ← S ( t ) with last digit removed ( if any); else if γ (4 t + 1) > m/ 4 then T ( S ( t ) , “ > ”) ← T ( S ( t ) , “ > ”) + 1 ; if T ( S ( t ) , “ > ”) = τ then T erminate with ϕ ( x ) = x>S ( t ) ; end else if γ (4 t + 2) < m/ 4 then S ( t + 1) ← S ( t ) with last digit removed ( if any); else if γ (4 t + 2) < 3 m/ 4 then T ( S ( t ) , “ ≥ ”) ← T ( S ( t ) , “ ≥ ”) + 1 ; if T ( S ( t ) , “ ≥ ”) = τ then T erminate with ϕ ( x ) = x ≥ S ( t ) ; end else if γ (4 t + 3) < m/ 4 then S ( t + 1) ← S ( t ) ⌢ 0 ; else if γ (4 t + 3) < 3 m/ 4 then T ( S ( t ) , “ app end ”) ← T ( S ( t ) , “ append ”) + 1 ; if T ( S ( t ) , “ a ppend ”) = τ then T erminate with ϕ ( x ) = x ≥ S ( t ) ⌢ 1 ; end else S ( t + 1) ← S ( t ) ⌢ 1 ; end Fig. 3. Post-processing of recei ved signals in Scalable Max-EC. V I . S I M U L AT I O N R E S U LT S W e m odel the pro blem as describe d in Section I II and run the Scalab leMax and Scalab leMax-EC alg o rithms as described in sections IV and V. Uniform rand om b its are used a s the agents’ input seque n ces ( S k ) n k =1 . W e assume un it tran sm ission power an d white Gaussian noise. Each plotted data poin t is an av erage over 10 5 identical and indepen dent simu lation ru ns. In Fig. 4a, we compare the perfo rmance of the pr o posed schemes in terms of err or rate , i.e., the rate o f unsuccessfu l termination of the scheme, a nd in Fig. 4 b, th e average numb er of iterations req uired in su ccessfully terminated ru ns o f the schemes. As the n oise power increases, so does the chance of unfav orable decisions b y th e coo rdinator . Sca la b leMax-EC has a me chanism to co rrect such bad decision s, and thus exhibits − 5 0 5 10 15 10 − 3 10 − 2 10 − 1 10 0 Noise p ower in dB Error rate no EC τ = 2 τ = 3 τ = 4 τ = 5 τ = 10 τ = 20 (a) Error rate − 5 0 5 10 15 10 1 10 2 Noise p ower in dB Iterations (b) Number of iterati ons until successful termination. Fig. 4. Perfo rmance of ScalableMa x (no E C) and ScalableMax -EC with v arious termin ation thresholds τ , n = 1000 , and m = 8 . lower er ror r ates, but at th e cost o f need in g mo re iterations than Scalab leMax. In Fig. 5, we c ompare the scalability of the ScalableMax- EC scheme with the state-of-the- art Ran dom-Br oadca st (RB) and Random-P airwise (RP) schemes described in [11]. T o this end, we extend our schem e w ith a RB step to deter mine the max imum amon g the m = 8 agen ts that rema in after a ScalableMax-E C run. W e ch oose τ such that this co m bination achieves an overall error rate of at most 0 . 005 . For c ompar- ison, we plot the numb er of iterations necessary in RB and RP to achieve a n error rate of 0 . 00 5 , g iv en that all d igital transmissions arrive er ror fre e. Th e ScalableMax-E C sch eme scales lo garithmically with the total number o f agen ts, while 0 1 , 000 2 , 000 3 , 000 4 , 000 5 , 000 0 50 100 150 200 n Iterations for ScalableMax-E C -1.0 dB, τ = 2 5.0 d B, τ = 6 7.0 d B, τ = 10 0 1 , 000 2 , 000 3 , 000 4 , 000 5 , 000 0 1 2 3 4 · 10 4 n Iterations for RB and RP RB RP Fig. 5. Number of iterations as a function of n for proposed Scala bleMax- EC scheme on the left y-axis, and state-of-t he-art Random Broadca st (RB) and Random Pairwise(RP) schemes on the right y-axis, for a fixed error rate < 0 . 005 . Note the dif ferent scale s of left and right y-ax es. RB an d RP scale at least linearly ( see also [11]). W e conc lu de with two o b servations made during the sim u - lations which are no t shown in the plots. First, if the agents’ input seq uences are quantize d versions o f Ga ussian r andom number s, the nu mber of iteration s needed incr eases slightly depend ing on the variance of the rando m num bers and the granular ity o f the qu antization. Secon d , th e perfor mance in terms of iteratio ns can be improved significantly by c hoosing a suitable S (0) o th er than ∅ . One examp le th at per f orms well is the coo rdinator outp ut estimate at which th e sch eme was terminated su ccessfully in an identically distributed but indepen d ent earlier simu lation run. Findin g other ways to choose suitable S (0) in practical scenarios remains an open point f or future research. V I I . E X T E N S I O N T O N O N - S TA R - S H A P E D N E T W O R K S In th is sectio n, we pro pose a metho d to extend our schemes to general und irected connected network graphs. W e assum e some prior coordin ation in that a set of designate d coor dinators { C 1 , . . . , C c } is known such that the grap h would still be connected if all ed ges that are no t ad jacent to one of the coordin ators were rem oved. Furtherm ore, we assume that these coordin ators have a way of sche d uling their co mmunicatio n in a sequential manner . N o te th at because of the con nectivity requirem ent, some agents necessarily have links with two or more co ordinato rs. W e deno te the subgraph of G in duced by C ℓ and its n eighbor s with G ℓ and achieve m ax-consen sus with these steps: 1) For each ℓ ∈ { 1 , . . . , c } , find a max-c onsensus in G ℓ and update the inpu ts of all age nts (to be used in a ll future max-con sensus steps) to be th e consensu s value. 2) Repeat step 1 a total of c times. After the initial execution of step 1 , at least one subg raph of age n ts will have the true maximu m as the inpu t for futu re consensus schem es. The connectivity requ irement ensures that after each fu rther execution of step 1, th is proper ty is p ropa- gated to at least one additional subgrap h, so after c repetitions, the w h ole network h as ach ieved max - consensus. Note that the ScalableM a x or ScalableMax- EC scheme is executed a total of c 2 times, so ou r schem e can be advanta- geous co mpared to the ran dom-p airwise or rando m-bro a dcast scheme only as long as the network can be partitioned into subgrap h s of very large size with a very small number o f coordin ators, which can for example be the ca se in ultr a -dense networks of not overly large diameter . V I I I . C O N C L U S I O N W e have intro duced a n ovel max-c onsensus protoco l de - signed to handle noise while exploiting inter f erence in o rder to be high ly scalable in star-shaped wireless networks. Under minimal assumptions o n th e initial values, we have p roved analytically that the consensu s is reac h ed with complexity that is lo garithmic in the number of ag ents. For the low and me dium SNR regime, we have added an erro r cor r ection mechanism which achieves lower overall error at the expe n se of increased comp lexity . Our simulations have demon strated that logarithm ic co mplexity is retained and the proposed schemes com pare fav orably with state-of-the- a rt baselines if the network is dense. Fin ally , we have extended the propo sed schemes to more gen eral, non -star-shaped networks. Open questions for futu re resear ch include fin ding a mech anism for distributed clusterin g, h ow to initialize the scheme with an optimal starting sequ e nce and finding su itab le pr e- and post- processing schem es that deal with fading. R E F E R E N C E S [1] T . W ongpiromsarn, K. Y ou, and L . Xie, “ A consen sus approach to the assignment problem: Application to mobile sensor dispatch, ” in IEEE ICCA 2010 . IEEE, 2010. [2] T . Borsche and S. A. Attia, “On leader election in multi-age nt control systems, ” in Chinese Contro l and Decision Confer ence . IEEE, 2010. [3] N. Sorensen and W . Ren, “Rendezv ous problem in m ulti-v ehicl e sys- tems: Information relay and local informati on based strategie s, ” in IEEE Mountai n W orkshop on Adaptive and Learning Systems . IEEE , 2006. [4] M. K. Maggs, S . G. O’Ke efe, and D. V . T hiel, “Consensus clock synchroniz ation for wireless sensor networks, ” IEEE Sensors J. , vol. 12, no. 6, pp. 2269–2277, 2012. [5] Z. Li, F . Y u, and M. Huang, “ A distributed consensus-ba sed cooper- ati ve spectrum-sensing s cheme in cogniti ve radios, ” IEE E T rans. V eh. T ec hnol. , vol. 59, no. 1, pp. 383–393 , 2010. [6] R. Olfa ti-Saber and R. Murray , “Consensus problems in networ ks of agents with switching topology and time-delays, ” IE EE T rans. Autom. Contr ol , vol. 49, no. 9, pp. 1520–1533, 2004. [7] G. Laff erriere, A. W illiams, J. Caughman, and J. V eerman, “Decentral - ized control of vehi cle formations, ” Syst. Contr ol Lett. , vol. 54, no. 9, pp. 899–910, 2005. [8] X. Ge, S. Tu, G. Mao, C.-X. W ang, and T . Han, “5g ultra-dense cellular netw orks, ” IE EE W ir eless Commun. , vol. 23, no. 1, pp. 72–79, 2016. [9] J. Fax and R. Murray , “Informati on flow and cooperati ve control of vehi cle formation s, ” IEEE T rans. Autom. Contr ol , vol . 49, no. 9, pp. 1465–1476, 2004. [10] J. Cort ´ es, “Distrib uted algorithms for reaching consensus on general functio ns, ” Automat ica , vol . 44, no. 3, pp. 726–737, 2008. [11] F . Iutzel er , P . Ciblat, and J. Jakubo wicz, “ Analysis of max-consensus algorit hms in wire less channel s, ” IEEE T rans. Signal P r ocess. , vol. 60, no. 11, pp. 6103–6107, 2012. [12] F . Iutzeler , “Distribute d estimati on and optimizati on for asynchronous netw orks, ” Ph. D. dissertati on, T elec om ParisT ech, 2013. [13] B. M. Nejad, S. A. Attia, and J. Raisch, “Max-consensus in a max- plus algebraic s etting: The case of fixed communication topologie s, ” in XX II Internati onal Symposium on Information, Communication and Automat ion T ec hnologi es . IEEE, 2009. [14] A. T ahbaz-Sale hi and A. Jadbabaie , “ A one-paramete r family of dis- trib uted consensus algorithms with boundary: From shortest paths to mean hitting times, ” in Proce edings of the 45th IEE E Confer ence on Decision and Contr ol . IEEE, 2006. [15] M. Goldenbaum and S. Stancza k, “Rob ust analog function computatio n via wireless multiple -access channels, ” IEEE T rans. Commun. , vol . 61, no. 9, pp. 3863–3877, 2013. [16] F . Molinari , S. Sta ´ n czak, and J. Raisch, “Exploiti ng the superposition property of wireless communicati on for max-consensus problems in multi-ag ent systems, ” . [17] F . Molinari , S. Stancza k, and J. Raisch, “Exploiting the superposition property of wireless communicati on for averag e consensus problems in multi-agent systems, ” in 2018 Europe an Cont r ol Confer ence (ECC) . IEEE, jun 2018. [18] M. Huang and J. Manton, “Stochastic consensus seeking with noisy and directe d inter-a gent communicat ion: Fixed and randomly varyi ng topologi es, ” IEEE T rans. Autom. Contr ol , vol. 55, no. 1, pp. 235–241, 2010. [19] M. Goldenb aum, H. Boche, and S. Stanczak, “Harnessing interference for analog functio n computation in wireless sensor networks, ” IE EE T rans. Signa l Pr ocess. , vol. 61, no. 20, pp. 4893–4906, 2013.
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment