System Level Simulation of Scheduling Schemes for C-V2X Mode-3
The 3rd Generation Partnership Project (3GPP) introduced Cellular Vehicle-to-Everything (C-V2X) as a novel technology for enabling sidelink vehicular communications. While a distributed scheduling scheme (i.e., C-V2X mode-4) has been standardized by …
Authors: Luis F. Abanto-Leon, Arie Koppelaar, Chetan B. Math
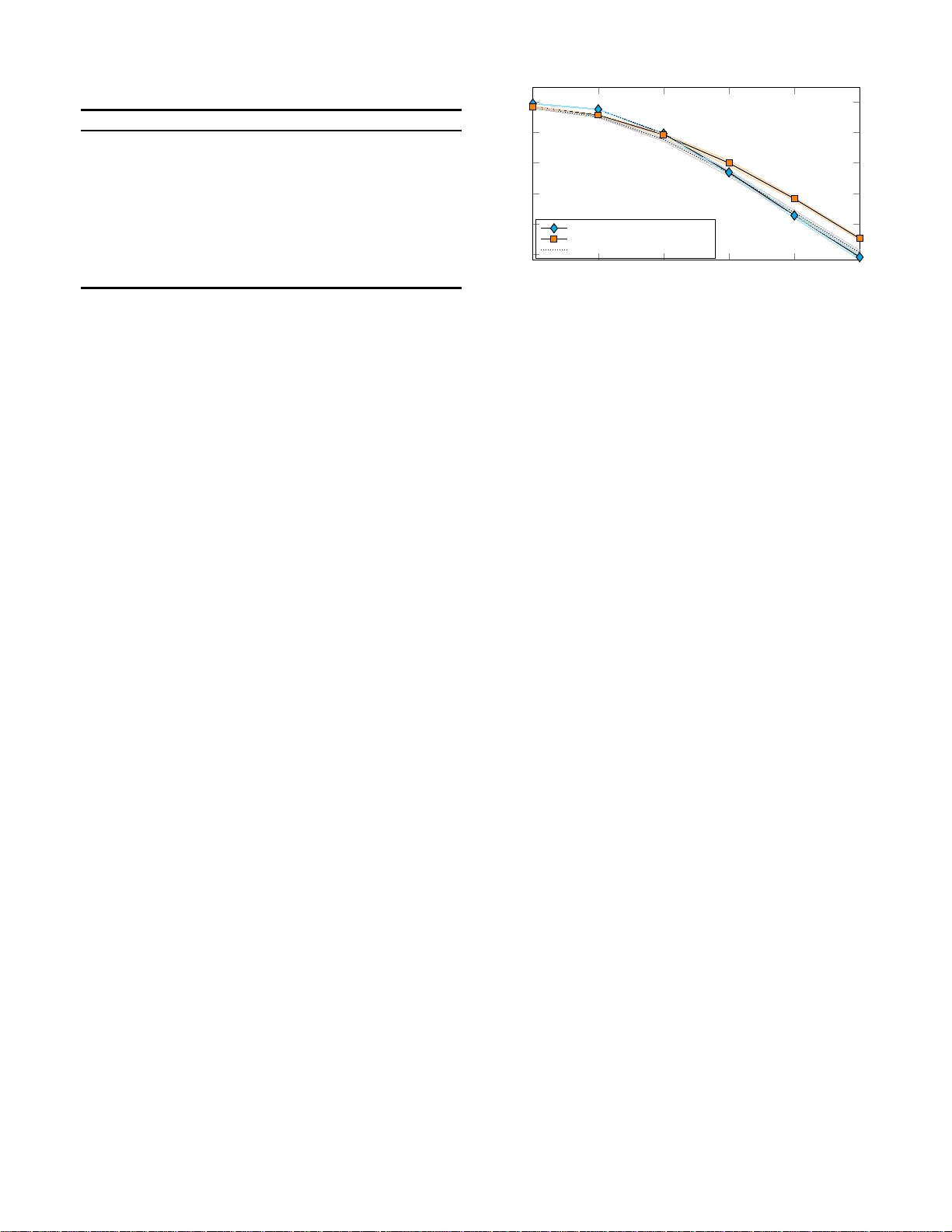
1 System Le v el Simulation of Schedu ling Schemes for C-V2X Mod e-3 Luis F . Abanto-Leon † , Arie Koppelaar ‡ , Chetan B. Math § , Sonia He emstra de Groot †† † § †† Eindhoven Uni versity of T echnology ‡ NXP Semiconduc tors † l.f.abanto@tue.nl, ‡ arie.koppelaar@nxp . c om, § c.belaga l.math@tue.nl, †† sheems tradegroo t@tue.n l, Abstract —The 3rd Generation Partnership Pr oject (3GPP) in- troduced Cellular V ehicle-to-Every thing (C-V2X) as a n ov el tech- nology f or enabling sidelink vehicular communications. While a distributed scheduling scheme (i.e., C-V2X mode -4 ) has been st an - dardized by 3GPP in order to sup port out-of-cov erage scenarios, the d esign of centralized infrastructure-based schemes (i.e., C- V2X mode-3 ) is open to implementation. In this paper , we propose two C-V2X mode-3 sch emes b ased on bipartite graph matchin g (BGM), called BGM - Pow and BG M - Dist . Specifi cally , BGM - Pow allocates sub channels based on the minimization of the ov erall power perceiv ed by the vehicles whereas BGM - Dist is based on the maximization of the subchannels reusage di stance. Through simulations we show that the proposed centralized schemes outperform C-V2X mode-4 as the su bchannels can be assigned more efficiently with reduced interference. Index T erms —subch annel scheduling, vehicular networks, mode-3, mode-4, sid elink, S PS, C-V2X, L TE-V2X. I . I N T R O D U C T I O N Cellular V ehicle-to-E verything ( C-V2X) commu nications is one of th e novel p aradigms introdu ced by the 3rd Gen eration Partnership Project (3GPP) [1] in Release 14. C-V2X com- munication s is envisaged as a depe ndable techno logy capa- ble of meeting stringen t latency and reliab ility requirements in dynamic vehicular scenarios. T wo operation mo dalities have been d e fin ed within C-V2X, namely mode-3 and mod e- 4 [1]. The former aims centralized s ystems, and therefor e relies on the av ailab ility of cellular infrastru cture, such as eNodeBs. Spec ially , eNodeBs can optimize any u tility criteria for alloc ating sidelink subchan nels to vehicles. For instance, [2] describes a scheme in which the sum -rate capacity is maximized based on the subchannels signal-to- interferen ce- plus-noise ratio (SINR) that vehicles report to eNode Bs. Contrastingly , [3] relies o n the geogr aphical clusterin g of vehicles, wh ere intra- and inter-cluster constraints ar e defined with additional differentiated QoS requirements per vehicle. Once an eNod eB has computed a suitable allocation of the subchann els, vehicles are no tified via downlink—upo n which direct vehicle-to-vehicle (V2V) sidelink com munication s takes place over th e assigned subch a nnels. Contrastingly , C-V2X mode-4 op erates autonom o usly and distributedly without the necessity of a central orch estrator . Thus, vehicles mo nitor the power le vels th r ougho ut all the sub channels and then select a suitable on e for their own utilization . Dichotomy between centralized and distributed schemes: In C-V2X mode-3 , the sidelink subch annels can be alloca te d more e fficiently d ue to th e h umong o us amou nt of knowledge that is av ailable at the eNodeBs. Conversely , a notice a ble drawback o f C-V2X mode-4 is th e restricted local knowledge of each vehicle, thus pr eventing them f rom selecting an op- timal sub channel. Moreover—due to incoordina tion—sev eral vehicles may compete over the same subset of subchannels, thus lea ding to se vere packet reception ratio (PRR) d egrada- tion. In o r der to diminish the o ccurrenc e s of alloca tio n co n- flicts, 3GPP standardized a semi-pe r sistent scheduling (SPS) scheme. I n particu lar , (i) each vehicle sen ses the power on all subchann els to un derstand their u tilization (i.e. busyness) an d (ii) then selects a subchannel, wh ich m ay be u noccup ied or experiences low received p ower . The allo c ated subch a nnel is utilized on a quasi-steady basis by the vehicle until resched u l- ing is req uired. Du e to short-term in variability of the alloca- tion, any vehicle seeking resch e d uling is capa ble of acquirin g a degree of understand ing on the subchannels utilization by perfor ming sensing. Thus, through this mech anism, vehicles can improve the likelihood of its own transmitted messages being received reliably by selecting suitable (but n o t optimal) subchann els with low interfere n ce. Motivation: While C-V2X mode-4 has be en clearly defin ed, there is a lack of centr alized scheduling sche m es fo r C-V2X mode-3 communicatio ns. I n th is pap er , we have d evised two approa c h es inspired by bipartite graph matchin g (BGM) and compare th em a gainst C-V2X mod e-4 prop osed by 3GPP [ 1]. The paper is structured as f ollows. In Sectio n II, we d e scribe the system mo del. In Section III, the two propo sed C-V2X mode-3 scheduling approaches are d escribed. In Section IV , the 3GPP SPS schedulin g sch eme f or C-V2X mo de-4 co mmu- nications is briefly revisited. Section V is devoted to simulatio n results. Finally , Section VI su m marizes ou r conclusion s. I I . S Y S T E M M O D E L A 10 MHz intelligent transpo rtation system s (ITS) chann el for exclusi ve sup port of sidelink commu nications is assumed . The whole channel is divided into se veral time-f requency resource partitions—herein after called subchanne ls. Each su b - channel has dimen sio n s of 1 ms in time (i. e. eq u iv alen t to one L TE subframe length) and N reso u rce blocks (RBs) in frequen cy . A subchann el is assum ed to be capable of carrying a co o perative awareness message (CAM). In this work , we assume a nomin al m essage rate of ∆ C AM = 10 Hz. T herefor e, the maximum amo unt of time di v isions is 100. In a similar manner as subchanne ls in C-V2X mode-4 are reserved on a semi-persistent basis—in the centralized sch emes presented 2 T ABLE I : Simulatio n parameter s Description Symbol V alue Units Number of R Bs per subchannel (per s ubframe) N 30 - Number of s ub-bands F 3 - Number of s ubchannels - 300 - CAM message rate ∆ C AM 10 Hz CAM size M C AM 190 bytes MCS - 7 - Transmit power per CAM - 23 dBm SINR threshold γ T 3.98 dB Scheduling period [4] T S P S 0.5-1.5 s Antenna gain G t , G r 3 dB Shadowing standard deviation X σ 7 dB Shadowing correlation distance - 10 m herein—the same assumptio n p rev ails in order to make a fair compar iso n between the appro aches. Thus, subchann e ls are u tilized by v ehicles for T S P S seconds ( T S P S is r andom as specified by 3GPP). During th is period, a vehicle will periodically broadcast on the assigned sub channel, and u pon termination a new reservation will be required. In additio n, at any time instance there is a nu mber of vehicles in th e system that requ ire re-schedulin g (when T S P S countdown has reached zero). The eNodeB will be notified of suc h a requ irement and a new allocation of resources will be attempted using the schemes discussed in Section I I I. I I I . P RO P O S E D S C H E D U L I N G F O R C - V 2 X M O D E - 3 In this section, we b riefly descr ibe two schedu lings ap- proach e s that we pro p ose. BGM-Pow ( Minimization of overall received power ): In this approa c h the ob jecti ve is to minimize the overall recei ved power of the assigned sub c hannels. Thus, v ehicles requiring re-schedu ling transmit via up link the cond itions ( i.e., sensed power) they experience on the mo nitored subc h annels. Based on this information , a distrib ution of resources that minimizes the to tal receiv ed power will b e compu te d . Th e intu itio n behind this ap proach is that subch annels with low re c e i ved power may be mo re su itable as they m ig ht b e u noccup ied or experience n egligible interfer ence. In this case, the vertices of the graph are either vehicles or sub channels, and th e ed ge weights are rep r esented by the RSSI values of the subchan n els. BGM-Dist ( Ma ximization of subchann el r eusage range ): The objective of this appro ach is to attain maximal reusage distance for every subcha nnel in the system. Intuitively , th is will help in mitigating co-chann el inter ference. In this case, the edge weights are d etermined by the minimum distance at which other vehic le s are reu sing a p articular sub channel. I V . 3 G P P - B A S E D S C H E D U L I N G F O R C - V 2 X M O D E - 4 In the following, we briefly d escribe the 3GPP C-V2X mode-4 scheduling scheme. For a more detailed explan ation, the r eader is referred to [1] [4]. It co nsists of the following stages. P ow er sensing : The veh ic le s con tinuously monito r the re- ceiv ed power o n each subcha n nel excep t on those where monitorin g was not possible, e.g. due to half-d uplex limitation . Subchannels categorization : Some subchan n els will be ex- cluded from selection based on the average PSSCH-RSRP . 50 100 1 50 20 0 25 0 300 0.5 0.6 0.7 0.8 0.9 1.0 Distance [meters] Pack et Receptio n Ratio (PRR) Proposed | BGM -Pow Proposed | BGM -Dist Standard | 3GP P Mode-4 Fig. 1: PRR perfo r mance f or various distan c es This is an iter ati ve stage where a th r eshold is gr adually increased in order to adm it mo r e sub channels with inc r e- mented interf e rence until the r e are at least 20% of candidate subchann els for selection. Subchannel selection : Amon g th e pr e-selected candida tes in the previous stage, a subchan nel is r andomly cho sen . V . S I M U L AT I O N S In this section, we compar e the standard ized 3GPP sched ul- ing method ag ainst the two propo sed ap proache s. W e ass ess a freeway scenario with 600 vehicles over 40 seconds o f simulation. The simulations have b e e n p e rformed 5 times with different seeds in order to evaluate de viations. The relev ant parameters fo r the exper iments are shown in T able I. W e observe in Fig. 1 the PRR cu r ves for the m entioned approa c h es. Furth ermore in shaded colors, we depict the devia- tions which are originated du e to p erform ance variations when using dif ferent seeds. These rep resentations ca n be r egarded as intervals with 99.999% of confiden ce. W e can ob ser ve that the scheduling scheme based on distance maximization outperf orms C-V2X m ode-4 across all the distances. Howe ver , the ap proach based on minimization o f the sum of received powers can only outpe r form C-V2X mode-4 in the n ear field— which is a c ritical region. In the far-field (1 5 0 m a n beyond) its perf ormance is co mparab le to C-V2X mode-4 . V I . C O N C L U S I O N W e h av e pro posed two centralized schedu lin g sch emes for C-V2X mod e-3 . W e conclu de that only the d istance-based approa c h performs better than th e distributed mode for all distance range s. For f urther study , we a im at com bining both RSSI values and distance information to improve the perfor mance o f th e centralized ap proach . R E F E R E N C E S [1] 3GPP , “Evolved Uni versal T errestrial Radio Access (E-UTRA); Physical layer procedures, ” 3rd Generation Partne rship Project (3GPP), T echnical Specifica tion (TS) 36.213, December 2017, ve rsion 15.0.0. [2] L. F . Abanto -Leon, A. Koppel aar , and S. H. de Groot, “Graph-based Resource Allocation with Conflic t A voidan ce for V2V Broadcast Com- municati ons, ” in IEEE PIMRC , 2017, pp. 1–7. [3] ——, “Subchannel Allocatio n for V ehicle-to-V ehic le Broadcast Commu- nicat ions in Mode-3, ” in IEE E WCNC , 2018, pp. 1–6. [4] 3GPP , “Evolved Univ ersal T errestrial Radio Access (E-UTRA); Radi o Resource Control (RRC); Protocol speci fication, ” 3rd G eneration Partne r- ship Project (3GPP), T echnical Specification (TS) 36.331, January 2018, versi on 15.0.1.
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment