Decentralized Assignment of Electric Vehicles at Charging Stations Based on Personalized Cost Functions and Distributed Ledger Technologies
In this paper we propose a stochastic decentralized algorithm to recommend the most convenient Charging Station (CS) to Plug-in Electric Vehicles (PEVs) that need charging. In particular, we use different cost functions to describe the possibly diffe…
Authors: Michela Moschella, Pietro Ferraro, Emanuele Crisostomi
1 Decen tralized Assignmen t of Electric V ehicles at Charging Stations Based on P ersonalized Cost F unctions and Distributed Ledger T ec hnologies Mic hela Mosc hella, Student Memb er, IEEE , Pietro F erraro, Eman uele Crisostomi, Senior Memb er, IEEE , and Rob ert Shorten, Senior Memb er, IEEE A bstr act —In this pap er we prop ose a sto c hastic de- cen tralized algorithm to recommend the most con v e- nien t Charging Station (CS) to Plug-in Electric V e- hicles (PEV s) that need c harging. In particular, w e use different cost functions to describ e the possibly differen t priorities of PEV drivers, suc h as the prefer- ence to minimize c harging costs, c harging times, or the distance b etw een them and the CS. F or this purp ose, w e lev erage on an IoT arc hitecture based on a p ermis- sioned Distributed Ledger T ec hnology (DL T) to enforce compliance of driv ers and reduces the o ccurrence of detrimen tal misb eha viours of drivers. Extensive simu- lations p erformed with the mobility simulator SUMO in realistic cit y-wide net w orks ha ve been pro vided to illustrate how the proposed PEV assignment pro cedure w orks in practice, and to v alidate its performance. Index T erms —Electric V ehicles, Smart Cities, Cyb er-ph ysical Systems, Distributed Ledger T ec hnology I. Introduction A. Motivations The In ternet of Things (IoT) has become, in recent y ears, a topic of great interest in academia and industry alik e, thanks to the adven t of smart homes, smart cities, and smart everything [1]. The interaction of numerous small and light w eigh t computing elements is exp ected to enable a n um b er of distributed services and opp ortunities for innov ation at v arious levels. F rom a daily life persp ec- tiv e, IoT is exp ected to affect a v ast array of domains: housing [2], health-related applications [3] and enhanced learning [4] are just a few examples of the areas that are going to b e dramatically altered. A t the same time, at a higher level, IoT is exp ected to bring adv antages to the comm unit y as a whole, by providing services such as smart mobility [5], detecting weather conditions [6] and monitoring surgery in hospitals [7]. Concurren tly with this ever-expanding in terest in the IoT w orld, in the mobilit y sector it is p ossible to notice an increasing interest in electric vehicles (EV s), whose Michela Moschella and Emanuele Crisostomi are with the Department of Energy , Systems, T erritory and Constructions Engineering, Universit y of Pisa, Pisa, Italy (e-mail: michela.mosc hella@ing.unipi.it, emanuele.crisostomi@unipi.it) Pietro F erraro and Rob ert Shorten are with the Dyson School of Engineering Design, Imperial College London, London, UK (e-mail: p.ferraro@imperial.ac.uk, r.shorten@imp erial.ac.uk) n um b er of sales w orldwide is rapidly increasing ev ery year. While the original main driver tow ards the adoption of EV s was the decreasing of harmful tailpip e emissions in cit y centers, there is now a growing interest of p ow er Distributed System Op erators (DSOs) in utilizing EV s as mobile storage units, in the case of Plug-in EV s (PEV s), to improv e the robustness and the resilience of the p ow er grid. In addition, PEV s may b e successfully used to fa- cilitate the p enetration of Renew able Energy (RE), to b oth mitigate their fluctuating energy generation, and fully exploit energy generated at peak times. It is th us clear that a smart management of the charging pro cess of PEV s is required to fully exploit their p otential, while a v oiding p ossible inefficiencies for the distribution grid, e.g., in terms of v oltage limits of the buses or thermal inefficiencies of electrical feeders and substations. In this context, the connectivity b etw een PEV s fleets, the related interactiv e infrastructures (e.g., charging sta- tions (CSs)) and effectiv e management of their in teractions is an emerging application of the IoT technology . The in tersection b etw een these t wo emerging domains is thus the fo cus of this work. In particular, in this manuscript w e inv estigate the problem of optimally assigning PEV s to fast CSs (the PEV-CS assignment pr oblem from now on), taking into account p ersonalized cost functions; actually , differen t individuals may b e interested in choosing their preferred CS according to different reasons, which could range from minimum charging price, to minim um trav el distance or minimum ch arging time. F or this purp ose, we shall leverage on IoT based technology to conv eniently share the relev ant information, solve the assignment prob- lem in a decentralized manner, and further consider the compliance of users to actually tra vel to wards the recom- mended CSs. T o enunciate clearly the sp ecific con tributions of this pap er, we note that our starting p oin t is the companion pap er [8]. This pap er w as one of the first w orks to form ulate the problem of decen tralized charge-point assignmen t, and to suggest a solution. In this present pap er w e extend significantly the results of [8], b y relaxing four basic assumptions that underpin w ork described therein. 1. Co op eration: A strong assumption in [8] is that CS owners co op erate with each other to ac hiev e © 2021 IEEE. Personal use of this material is permitted. Permission from IEEE must b e obtained for all other uses, in an y current or future media, including reprinting/republishing this material for adv ertising or promotional purp oses, creating new collectiv e works, for resale or redistribution to servers or lists, or reuse of any copyrigh ted component of this work in other works. 2 balancing. This assumption is, of course, v ery unrealistic. In the presen t setting, comp etitiv e comp etition b etw een owners is considered. 2. Homogeneit y: Another assumption in [8] is that all PEV owners hav e the same preferences. Here, w e consider that in realit y some driv ers ma y ha v e different priorities, and in particular may b e in terested in minimizing c harging times, or c harging costs (that in fact, had not b een considered in [8]). 3. Compliance: The third assumption in [8] is that car-o wners comply ridgidly with assignments. This assumption, whic h is a cornerstone of man y works in Smart Cities, is clearly not realistic as the issues around compliance in the context if Covid-19 clearly demonstrate. Distributed compliance strategies are not only clearly necessary in so ciety , but also actually represen t a challenging and imp ortant frontier topic in con trol theory , IoT, and other disciplines, requiring the design of compliance strategies that are fair to all participants, bias free, and preserve priv acy . T o the b est of our kno wledge, the nov el DL T-based compliance metho d here is in tro duced for the first time in the context of CS assignment. W e emphasize that the issue of compliance in the context of this (and similar) problems is usually dealt with in an indirect manner using a game the or etic approach. In the game theoretic approach one seeks to create an equilibrium that incentiv es go o d b eha viour. Our approac h is fundamentally different. Here, we use a DL T architecture to create a p ersonalised economic commitment mechanism using tokens to enforce compliance. It is w orth also noting that this approac h is extremely well grounded in b ehavioural economics by the theory of hyperb olic discounting [9], but b ecomes extremely implemen table using DL T’s that do not require transaction fees. The DL T can also b e used to enable other services such as secure ownership of exchange of data (which is not discussed in the present man uscript), and to ensure fairness and bias free op eration. 4 Risk: The fourth assumption, based on Item 3. ab o v e, concerns the risk of non-compliance, its pricing, and its managemen t. As we mentioned, the issue of compliance is ignored in [8] and indeed most previous works on this topic. A further contribution in this context is to tac kle the compliance problem, and sp ecifically ho w to price compliance, using a con trol theoretic approach; sp ecifically , by wrapping a feedbac k lo op around the compliance problem. By doing this the risk of a reduction in the quality of service can b e con trolled and managed in real time. Notice that solving the problem of economic commitmen t in this manner gives rise to man y new mathematical challenges akin to sto chastic economic string stability as enunciated in [5]. These problems are how ever b eyond the scop e of the presen t pap er whic h is dev elop ed for an IoT setting; the interested reader may ho wev er refer to [5] for a preliminary form ulation of some of these problems. A further con tribution b eyond [8] is that the assignmen t problem is solved in a fully decentralized fashion. Thus, neither PEV s hav e to exchange information with other PEV s, nor CSs require to exc hange information with other CSs. This is conv enien t as CSs may b e reluctant to reveal p ossibly sensitive information (e.g., the length of the queue of charging PEV s or charging prices), and the same is true for PEV owners (e.g., how muc h energy they need). These are additional cotributions o ver [8]. Finally , it is also w orth noting that this pap er presen ts a unique p ersp ec- tiv e on the problem of c harge p oint assignmen t, bringing ideas from different domains such as DL T s, decentralised optimization, control theory and unifies them in a cyb er- ph ysical framework to manage the increasing amoun t of electric vehicles in our cities and properly exploit their full potential. B. Or ganization The remainder of this pap er is organized as follows. Section I I revises the current state of the art. Section I I I describ es the PEV-CS assignment problem, and form u- lates the prop osed decentralized optimization problem to solv e it. Then, Section IV presents the system architec- ture and the compliance analysis. The following Section V shows and discusses the obtained simulation results. Finally , Section VI summarizes our main findings and outlines possible future extensions of our work. I I. St a te of the Ar t It is known that uncon trolled c harging of PEV s ma y lead to grid problems in terms of p o wer losses and voltage deviations, esp ecially in presence of a large p enetration of PEV s in the vehicular fleet [10]. Accordingly , the impact of PEV s on the p ow er grid has b een widely in v estigated in a num b er of pap ers, see for instance [11] where a comprehensiv e surv ey of artificial-in telligence based solutions is provided, and [12] for deterministic metho dologies like Mo del Predictive Con trol (MPC). In this context, the a v ailability of measured data is extremely v aluable to realistically mo del actual real driv ers’ c harging patterns (e.g., [13], [14]) and design w ell-co ordinated c harging strategies [15]. Some w orks ha v e rather fo cused on the minimization of the impact on the p ow er grid [16], while other works prioritized the w aiting time at CSs [8] or the minimization of p olluting emissions and charging costs [15]. Sp ecifically , in this pap er we are interested in the PEV- CS assignment pr oblem , which consists in recommending the most con v enien t CS to any v ehicle requesting to b e charged. Usually this problem is formulated as an optimization problem, where the b est assignment is 3 the one that minimizes a cost function of in terest. F or instance, in [17] the optimal scheduling aimed at minimizing the waiting time of PEV s at each CS; in [18] a Ly apuno v optimization approach was used to improv e the utilization of RE and reduce charging costs. A combined cost function was used in [19] to take into accoun t traffic congestion, waiting time at CSs, battery constraints and also the energy price. Ho w ever, most of the aforementioned approaches (e.g., [16], [19] and [20]) may arguably hav e a limited effectiv eness in practice. F or instance, optimal solutions are static: as a Nash Equilibrium represents the optimal solution of a static system, a new element (that could b e a CS or a PEV) entering or leaving the system may in general require to recompute the optimal solution. Also, such methodologies implicitly assume that the actors (here the PEV s) will follow the receiv ed optimal recommendations, as declining to follo w the receiv ed recommendation has an impact on the optimality of the global solution. In addition, another imp ortant asp ect that is often neglected in most of the literature is the b eha vior of the drivers , as not all drivers hav e the same priorities, and ma y take different decisions (e.g., the c hoice of a CS where charging) based on their o wn p erception and in terests. F or instance, this asp ect is in v estigated in [19] and [21], where prosp ect theory [22] and cumulativ e prosp ect theory resp ectively are used to model real-life h uman choices, and in [23], where the in teraction of driv ers with utilities and retailers is mo deled as a function of their so cial classes (e.g., to predict the reaction of PEV s to discoun t charging fees). Another asp ect to be tak en in consideration is the underlying architecture of the mo del; the IoT paradigm offers the ability to ensure security and efficiency of a system, with low communication and computation costs. No w ada ys, man y researc hers are applying the IoT communication to the electric vehicles world, with man y sp ecific applications; among v arious examples, [24] prop oses an E-AUA proto col for driverless electric cars, for a secure and efficien t system while [25] exploits the IoT tec hnology to jointly optimize the PEV s routing and the c harging scheduling, by means of a distributed algorithm. In another example [26], the authors fo cus on the PEV s c harging problem, and prop ose a real-time solution to impro v e the charging scheduling of PEV s, without the in terv ention of a third-part y and protecting the PEV s’ user priv acy . Unfortunately , the latter approach is centralized, b ecause it is based on a database whic h con tains CSs and PEV s data to be processed, while decentralized algorithm, generally harder to implemen t, are preferred for a more efficient and scalable system. In the context of this push to w ards decentralization, concurrent with this growth of interest in IoT, Distributed Ledger T echnologies (DL T s) hav e b een prop osed as a solution for distributed consensus in a database [27], in a p eer to p eer (P2P) net w ork. In the aftermath of the 2008 financial crisis, Satoshi Nakamoto prop osed in their whitepap er [28] the use of an architecture, called the Blo ck c hain, to create a distributed digital currency , the Bitcoin. Since then, academia and industry hav e been studying this new technology to expand its scop e of application b ey ond financial transactions. T o name a few examples, DL T s hav e b een proposed as an enabling technology for managing, controlling and securing interactions in a range of cyb erph ysical systems [29] [30] [31]. Due to their distributed and trustless nature, DL T s ha ve c haracteristics that pro ve adv antageous as a data transfer and transaction settlemen t system for the IoT domain [32]. Still, despite these adv an tages, Blo ck chain presents many limitations: the large energy cost of mining, long transaction approv al times, transaction fees, and the inherent preference of miners to prioritize some transactions (generally ones associated with larger economic v alues) [5]. These c haracteristics create a bottleneck when thousands of devices communicate with each other many times p er second. While sev eral Block c hain-based solutions hav e b een proposed to ov ercome these problems [33] [30] [27], in this pap er w e fo cus on a different kind of DL T arc hitecture based on Directed A cyclic Graphs (D A Gs) and more sp ecifically on the one prop osed in [34] and [35]. This architecture seems to p ossess prop erties that mak e it suitable for the IoT domain; for a more thorough comparison betw een Blo ck chain-based DL T s and DA G- based DL T s, in the IoT con text, the interested reader can refer to [5]. I I I. The PEV-CS Assignment Algorithm W e consider an urban netw ork, where a PEV requiring c harging has a num b er of differen t options of where to rec harge within a reasonable driving distance. Since charg- ing times are longer than the refueling times required by con v entional vehicles, it is now of paramount importance to assign PEV s to CSs in a balanced fashion, as failure to do so may give rise to unacceptably long queues (as exemplified in Fig. 1). In practice, some drivers may b e in terested in minimizing the driving distance (e.g., if the State of Charge (SOC) of the battery is low), some ma y w an t to minimize the c harging price, or the c harging time (i.e., taking into accoun t the p ossible presence of queues at a CS), or in general a weigh ted combination of all the previous asp ects. In this section we describ e how a vehicle can b e automatically assigned to the most conv enient CS according to her/his preferences. A. A ssumptions Our work builds up on the following assumptions, that are common in most PEV-CS assignmen t problems: • W e use a Poisson pro cess to mo del a new PEV requiring c harging (as in [8] and [36]); • W e assume that the time betw een the PEV c harging request and the recommendation of the optimal CS 4 Fig. 1. Sub optimality of CSs netwo rk usage: (left panel) cars A and B look for a CS; (central panel) the nearest station is CS 1 for both car A and car B; (righ t panel) given the relatively long time required for charging a PEV, the obtained solution with a queue of tw o vehicles at the same CS is less convenien t than recommending a different CS to the tw o PEV s. is short enough so that the optimal solution is com- puted up on updated information (this implies that the assignment optimization problem is solved in a v ery short time, e.g., 1 s); • W e assume that the time required for charging is prop ortional to the required energy (as in [8], and similar to [16] and [20] with constant charge step); • Finally , we assume that once a v ehicle accepts to get c harged to the recommended CS, it will in fact drive to w ards the CS. This information is used to up date the total time for charging that will b e required by other vehicles that intend to drive to the same CS. This assumption of compliance will then b e relaxed and further analyzed in Section IV-A. W e now describe in Section I I I-B the proposed assignment algorithm based on p ersonalized cost functions. In Section I I I-C, it is shown how it can b e solved in a centralized ideal framework where all CSs are willing to exc hange the relev ant information, while in Section I II- D w e sho w ho w it can b e solved in practice in a decentralized wa y . B. Optimization pr oblem W e consider cost functions that are a weigh ted sum of three asp ects: the charging time T t , which includes the tra v el time to the CS, the p ossible time sp ent queuing and the effective time for charging; the charging price P t , where w e use the amoun t of energy generated from renew able sources as a proxy for the discoun t in the price of charging; and finally , the distance D t from the CS, used as a proxy for battery disc harge (i.e., if the battery lev el is v ery low, one ma y just wan t to choose the nearest CS). In particular, suc h three quantities are computed and normalized for PEV i as follows: • T t ( i ) = E t ( i ) /e r + T r t ( i ) / M max is the total time required for charging. This consists of the time T r t ( i ) required to reach the i -th CS, plus the time required for charging all vehicles in the queue (included the v ehicle itself ), computed as E t ( i ) /e r , where E t ( i ) is the sum of all the queued energy at CS i and e r is the energy received in 1 second, in k Wh. The term M max is included for normalization purp oses, so that on a verage this term of the cost function has a similar w eigh t of the other tw o terms; • P t ( i ) represents the normalize d pric e of c harging at CS i . In this work the charging price is computed as a function of the lo cally generated RE, assuming that the energy locally generated from renewable sources, if a v ailable, is free. T o simplify the computation of this factor, inspired by [18], we compute the energy price S t ( i ) as the following: S t ( i ) = e · max ( m − RE S t ( i ) , 0) , (1) where e is the energy tariff p er k Wh ([ e/k W h ], as- sumed to b e the same for all CSs) for conv entional energy , m is the energy requested by the user, and RE S t ( i ) is the forecast of p ow er generation from lo cal RE (at CS i ) during the future charging time in terv al. Consequently , the normalized term related to the energy price in the cost function, will b e the follo wing term P t ( i ) = S t ( i ) / ( e · m ) = max ( m − RE S t ( i ) , 0) /m. • D t ( i ) = dist ( x C S ( i ) , x P E V ( t )) /d max , where x C S ( i ) is the position of the CS i , x P E V ( t ) is the spatial lo ca- tion at step t of the PEV, and d max is the maximum considered distance b etw een the vehicle and a CS. The three comp onents are then aggregated in a single cost function as follows F t ( i ) = α 1 T t ( i ) + α 2 P t ( i ) + α 3 D t ( i ) , (2) where, based on their own priorities, users can choose the v alues of the w eigh ts in the vector α ( α > = [ α 1 , α 2 , α 3 ]), where the three p ositive weigh ts sum up to 1. Finally , if I denotes the set of the av ailable CSs, then at ev ery time step t when a PEV asks for c harging its battery , the follo wing optimization problem is solv ed: i ∗ = arg min i ∈ I F t ( i ) , (3) where the outcome i ∗ is the most con v enien t CS to be recommended to the PEV, and the cost function F t ( i ) is defined as in Equation (2). The role of the α parameters in Equation (2) is crucial because they represen t the preferences of the driv ers, and consequently drivers that c ho ose different v alues of α ’s will in principle receiv e different assignment recommendations. The normalization factors are required to make the differen t ob jectives comparable, so that when one driver giv es the same imp ortance to all three the comp onen ts (i.e., equal weigh ts), the three comp onents ha v e a similar impact on the recommended CS. Remark: While an y other more sophisticated equation ma y b e used to compute the charging price, Equation (1) simply reflects the fact that p ow er generated from RE is c heap er than the p ow er generated from other sources. 5 C. Centr alize d solution The problem (3)-(2) is a discrete optimization problem that can b e easily solved in a centralized wa y by c hec king what v alue of i (i.e., what CS) gives rise to the lo west v alue of the cost function. PEV s lo oking for c harging broadcast their p osition, p ersonal preferences and energy requests, and the algorithm computes the optimal CS solution for them; how ever, this requires that different CSs exchange some p ersonal relev ant data (e.g., the length of the queue at eac h CS, and the exp ected future av ailabilit y of energy generated from renew able sources at eac h CS). In practice, CSs ma y b e reluctan t to rev eal and comm unicate this kind of information as this would corresp ond to reveal to other comp eting CSs how successful they are in attracting PEV o wners (from the information of the length of the queue), and their pricing strategy (e.g., in terms of ho w mu ch energy they generate from renew able sources). Also, it computationally inefficient to contin uously communicate suc h information. F or this reason, in the next section we sho w how the same problem can be solv ed in a decen tral- ized wa y , exploiting the same strategy developed in [8], and in Section V we shall use the solution obtained in the cen tralized framew ork as a b enchmark for comparison. D. De c entr alize d solution A decentralized sto chastic implementation of the previous algorithm usually has a n um b er of adv antages, as mentioned in [8]. In particular, if the centralized- deterministic approaches require a large amount of comm unication b etw een all participants, in the sto chastic algorithm these kinds of requirements are usually lo w er; CSs do not need to exc hange information among themselv es (which may b e conv enient in terms of priv acy preserv ation of some relev ant data). Finally , decentralized solutions are kno wn to b e more robust than centralized solutions in general. Here, we use the same approac h proposed in [8] to con v ert the centralized algorithm in one that can b e solv ed in a decentralized manner. In practice, we assume that when a PEV needs c harging, it broadcasts (to all CSs) its p osition, its p ersonal preferences (i.e., vector α in Equation (2)), and its energy request. Then, the CSs start to broadcast a green signal (GS) with a frequency that is prop ortional to the v alue of the cost function. Mathematically , the green signal’s frequency is mo deled b y a decreasing function of the ob jective function F t ( i ) defined in (2). In this wa y , the most conv enien t CSs comm unicate their av ailability more frequently . In particular, we assume that the i -th CS communicates its av ailability at time step t with probabilit y p ( i ) C S , that similarly to [8] is computed as p ( i ) C S ( t ) = 10 − F t ( i ) , (4) where F t is the ob jective function (as in Equation (2)), computed with the data of the PEV. Once a vehicle receiv es a green signal b y a CS and accepts the recommen- dation, then it trav el tow ards the recommended CS, and its required energy is added to the queue of the c hosen CS. Thanks to the Theorem 1 of [8], we are also able to estimate the exp ected waiting time b efore the first green signal is received, which do es not exceed 2 seconds. Algorithm 1 gives the pseudo co de of the decentralized approac h just describ ed. Algorithm 1 Decen tralized algorithm for the PEV as- signmen t to the CSs Initialisation: at t , the PEV broadcasts α , x P E V ( t ), and the required energy m ; for ∀ i ∈ I do F t ( i ) = α 1 T t ( i ) + α 2 P t ( i ) + α 3 D t ( i ), p ( i ) C S ( t ) = 10 − F t ( i ) end for while the PEV is not assigned do for ∀ i ∈ I do if rand(1) < p ( i ) C S then CS i broadcasts a Green Signal (GS) end if end for if ∃ i ∗ s.t. CS i ∗ has emitted a GS then the PEV is assigned to CS i ∗ (if more than a GS is received at the same time instant, the nearest one is chosen) else PEV waits for the GS end if end while Remark: While both the centralized and the decen- tralized solution solve the same problem (3)-(2), the cen- tralized solution is guaranteed to recommend the most con v enient CS. On the other hand, in the decentralized solution the most conv enient CSs advertise their av ailabil- it y more often than the least con v enient CSs, so it is more lik ely , but not guaranteed, that the PEV will first sense the a v ailabilit y of the most conv enient CS. IV. System Architecture and Compliance In the previous section we describ ed the design of a decen tralized system whose aim was to optimally assign (according to individual cost functions) electric vehicles to charging stations. This scheme, while app earing simple in its structure, presents one main tec hnical challenge that needs to b e addressed: How do es one make sur e that, after ac c epting a r e c ommende d assignment, users wil l in fact tr avel to the assigne d CS? . In this regard, it is w orth noting that the issue of compliance is not a well addressed problem in studies of algorithms to regulate, con trol, and optimize cit y infrastructures [5]. In this specific man uscript with non compliance we refer to any agent (w e will use the word agent and user in terchangeably in the rest of the paper) signing up for station i and then going to another station (while at the same time o ccup ying the p osition in the queue with station i ). Of course, in a setting where the length of the queue affects the assignment of other vehicles, this kind of b ehaviour is exp ected to affect the p erformance of the prop osed algorithm. Sim ulations are provided later in the pap er, to confirm the negativ e effects of non compliance on the 6 C C C O D D D O O D C @ D C @ @ @ D C @ @ Fig. 2. (Left Panel) Driver D matches with station C and dep osits token for initiating a con tract as they are added to C’s queue. (Middle Panel) T oken is added, by v alidation of observer O to the account of station C. (Right Panel) Once the driver D reaches station C, observer O registers that the contract is fulfilled and activ ates the conditions, for the token to b e returned to its owner. system. T o address the compliance issue, we explore the use of Distributed Ledger T echnology (DL T), and in particular the use of a p ermissioned DL T based on Directed Acyclic Graphs (DA Gs). The basic idea, briefly depicted in Fig. 2 and explored more in detail later in this section, is to use token b onds, in the form of a crypto currency , to enforce users to comply with the matchmaking system. There are a n umber of reasons to use a DA G-based DL T arc hitecture for the aforemen tioned task and, in general, as a communication lay er in a smart city environmen t: • Privacy: In DL T s, transactions are pseudo- anon ymous. This is due to the cryptographic nature of the priv ate address 1 , that allows single individuals to protect their priv acy b ehind a large n um b er of transactions [37]. This do es not mean that DL T s users’ iden tities are completely anonymous as it is p ossible to trace back the trail of transactions among addresses. How ever, through randomization of the address, it is p ossible to mak e it exp ensive for malicious entities to trace the transactions. This mak es DL T s more robust, from a priv acy p ersp ective, in an IoT and smart mobilit y scenario. • Ownership: T ransactions in DL T s can b e encrypted. This allo ws ev ery agen t to decide who can ha v e access to the data present in their o wn transactions. In our setting the only data required to remain public is the ownership of the tokens, whereas other information (e.g., user qualit y of service, statistics on the usage of the system) can b e encrypted. This allo ws each user to maintain ownership of their data and to use them as they please (e.g., to monetize them at a later stage). • Micr otr ansactions: Due to the large amount of agen ts in an urban en vironmen t, and due to the need of rapidly changing real time conditions (such 1 https://laurencetennan t.com/pap ers/anonymit y-iota.p df as prices of energy , state of the energy grid, urban p ollution), data need to b e exchanged at a fast and large throughput. Public Blo ck c hain arc hitectures fall short in terms of the sp eed required for the CS assignmen t problem, whereas DA G-based ones may o v ercome this limitation. • F e es: The compliance scheme prop osed in this section relies heavily on the use of a feeless DL T (suc h as the IOT A T angle [38]). In fact usual paymen t systems (e.g., VISA, Mastercard,. . . ) and classical Blo ck chain arc hitectures (e.g., Bitcoin, Ethereum), due to their in trinsic design, will require users to pay a fee for every transaction p erformed. This, as will be explained later, makes them b oth inadequate to serve as the bac kb one for the prop osed compliance scheme. Finally , the complete arc hitecture of the system is sho wn in Fig. 3. It comprises tw o lay ers: a physical one, where the op erations describ ed in the previous section tak e place and a compliance lay er, in the form of a D A G-based DL T and a feedback con troller, whose aim is to regulate the compliance of the PEV s to the desired lev el. In the remainder of this section w e in troduce and describe the structure of the DL T system and the feedbac k con troller. Remark: Notice that the separations b etw een the tw o la y ers is purely from a functional p oint of view. Due to the fo cus of this pap er, in fact, we are limiting the current discussion on the use of DL T for the compliance one. In practice, it would b e p ossible to use the DL T system as a more general communication system that could b e emplo y ed to also carry out op erations inv olved in the ph ysical la y er. A. DA G-b ase d DL T The acronym DL T is a term that describ es Blo c k chain and a suite of related tec hnologies. F rom a broad p erspec- tiv e, a DL T is nothing more than a ledger held in multiple places, and a mechanism for agreeing on the conten ts 7 Cha r gi ng S t a t i ons (CS ) P l ug-i n E l e c t ri c V e hi c l e s (P E V ) Physical Layer Compliance Layer T C T C d C d t = g ( Q − Q ( t ) ) ( α , x P E V ( t ) , m ) G S Q ( t ) C ( t ) + - Q T C T C Feedback Controller Fig. 3. Architecture of the ov erall system. The physical lay er takes care of the matching b etw een vehicles and CSs. The compliance la y er is used to enforce compliance b etw een users in the form of a token bond, registered through transactions on a DL T. PEV s dep osit tok en bonds, T C , on the CSs accounts and they retriev e it, if they complied with the matchmaking system (refer to the dashed lines).The v alue of the token b onds, C ( t ) is regulated by a feedback con troller, whose aim is to stabilise the compliance lever, Q ( t ), around a desired level Q . of the ledger, namely the consensus mechanism. Made famous in the white pap er from Nakamoto in 2008 [28], the idea of Blo ck chain has shown great promise, especially as an immutable record k eeping to ol that enables financial transactions based on p eer-to-peer trust [39]. In order to reac h consensus, architectures such as Blo ck c hain op erate a probabilistic election leader mec hanism enabled via a system called Proof of W ork (PoW) [28], whereas other arc hitectures such as the IOT A T angle are based on DA G structures and a swarm like strategy to achiev e consensus [38]. A DA G is a finite connected directed graph with no cycles. In other words, in a DA G there is no directed path that connects a v ertex with itself. The IOT A T angle is a particular instance of a DA G-based DL T [32], where eac h transaction is represen ted by a vertex, and where the top ology of the graph represen ts the ledger. Refer to Fig. 4 for a brief description of this pro cess and to [5] for a more thorough analysis. As anticipated b efore, the T angle has the adv antage ov er Blo ck chain to allow microtransactions without any fees (as miners are not needed to reach consensus ov er the net w ork [38]). B. Complianc e Me chanism The concept b ehind compliance w as already explored in [5] and revolv es around the use of crypto tokens , asso ciated with some economic v alues, to b e used as collateral in order to b e assigned to a specific queue from a CS. Refer to Fig. 2 for a visual represen tation of this pro cess. Whenever there is an agreed matc h b etw een a v ehicle and a station, the v ehicle dep osits some amount of tok ens into the charging station account and, when Fig. 4. Sequence to issue a new transaction in the T angle. In the top panel, 3 new transactions (grey vertices) are issued and they are in the pro cess of carrying out their PoW. In the b ottom panel the PoW has b een completed and those vertices are added to the T angle. The blue sites represent the approv ed transactions while the red ones describ e transactions that have not received any approv al yet. Black full edges represent approv als, whereas dashed ones represent transactions that are in the pro cess of completing the PoW. the vehicle sho ws up to the station, the tokens are automatically returned. Notice that if this op eration was p erformed on a classical Blo ck chain or on other common pa ymen t metho ds, the user would b e forced to pay a fee for each transaction and, due their nature as a b ond, whic h needs to b e returned in its full v alue to the user (giv en that the user complied), a fee on each transaction w ould mak e this system non feasible. F rom a formal p oint of view this pro cess can b e describ ed as follows : we are in terested of main taining the o verall lev el of compliance of the system to a desired level Q ∈ [0 , 1]. T o do so, we introduce a controller that regulates the v alue of the dep osit b ond, C ( t ), using the curren t compliance level Q ( t ) (this v alue is extracted directly from the ledger). Refer again to Figure 3 for a b etter understanding of the in terconnection b et w een each la y er. Finally , the compliance la y er is designed in suc h a wa y that whenev er a user issues a token, this bond can b e retriev ed by the user if and only if the vehicle reac hes the CS in a certain amoun t of time. This pro cess can b e made automatic by using a combination of smart con tracts (a computer program that executes as so on as certain conditions are met) [40] and an access mechanism called Pro of of Position (explained later in the text) [34]: namely a DA G-based DL T called Sp atial Positioning T oken (SP- T oken) which represen ts a p ermissioned version of the IOT A T angle. This means that, unlik e public DL T s, in whic h eac h user has complete freedom on how to up date the ledger with transactions, the SPT oken net w ork has a regulatory policy based on the ph ysical positions of agents. This feature allo ws for a n umber of differen t uses: it can be emplo y ed to preven t agents from spamming transactions that do not p ossess any relev ant data (since transactions 8 can b e encrypted) [34] or, as in this sp ecific application, it can b e used to make sure that an agent satisfies certain conditions and therefore that c heating is not p ossible from b oth sides of the transaction (e.g., a dishonest CS might b e inclined to not return the b ond ev en though a user complied with the matc hmaking system). Therefore, as a v alidation mechanism, SPT oken makes use of, b eside the classical PoW, also of a PoP to authenticate transactions. In other words, for a transaction to b e authenticated, it has to carry proof that the agent w as at a certain lo cation. This is achiev ed via sp ecial no des called Observers (see Fig. 2). F or a thorough discussion on this topic, the in terested reader can refer to [34]. V. Anal ysis and Resul ts W e now analyze and present the main results that are obtained by applying the prop osed algorithms to assign PEV s to CSs. T o b etter clarify ho w the algorithm works, w e first present results that are obtained in an idealized scenario where CSs are p oints in a unit square and ve- hicles can directly driv e within the square to w ards the CSs. All distances are thus measured using the Euclidean metrics, disregarding of whether there exists a direct road that connects the PEV with a CS. In the second set of sim ulations, we relax this assumption, and distances are the true distances in a realistic urban netw ork. In our simulations, we assume that vehicles are charged with a c harge rate of 22 k W (i.e., e r = 0 . 0061 k Wh in the definition of T t in (2)) at each simulation step (1 sec), that is consistent with the pow er rate of most public c harging p oles (see [41]). In [42] it had b een sho wn that the av erage charged energy at urban CSs is around 5 k Wh, and consistently w e ha v e assumed that the energy required by PEV s is sampled from a Gaussian distribution cen tered in 5 k Wh with a standard deviation of 1 . 2 k Wh. This implies that the maximum c harging time is ab out 1300s (i.e., ab out 22 min), corresp onding to a request of 8 k Wh. Finally , w e assume that CSs may either be equipp ed with PV panels of 10 k W of nominal p o w er, or with a wind turbine of 5 k W, or may not hav e renew able sources at their disposal. F or our sim ulations, w e ha ve used MA TLAB (2016b release) to simulate the whole system and the algorithm, with Windows 10 as op erating system. The mobility simulator SUMO (v. 1.3.1) was used to sim ulate vehicular flows in the second set of simulations (Sections V-C and V-D), for the case study of the city cen ter of Pisa, Italy . A. The Effe ctiveness of the Multi-Obje ctive Cost F unctions In our pap er we consider p ersonalized cost functions. This implies that tw o drivers with differen t priorities may ha v e t w o differen t recommended CSs. In order to clarify the exp osition, w e no w introduce three differen t performance indicators to quantify the impact of the single comp onen ts of the cost function (2): 1) i ct , the p erformance index for the c harging time. It is the av erage w aiting time for charging (i.e., it includes trav el time to the CS, the p ossible time sp en t queuing and the effective time for charging), a v eraged ov er the set of charged vehicles during the sim ulations; 2) i ep , the av erage energy price per k Wh. It is computed follo wing the idea of Equation (1), that is by consid- ering e · E charg ed − E RE /E charg ed , where the tariff e is chosen as 0 . 45 e/k W h , which is consistent with the price in Italy 2 ; E charg ed is the energy charged in the simulation, and E RE is the amoun t of RE used. Consequen tly , in the absence of energy generated from REs, the av erage energy price p er k Wh will b e exactly 0 . 45 e/k W h , whereas if the CSs hav e their o wn REs, they may sell energy at a low er price. 3) i d , the av erage distance b et ween a PEV and the assigned optimal CS (here, in the unit square). F or the next analysis, we considered results related to 75 Mon te Carlo simulations run with differen t cars p ositions and different charging requests; the p erformance indicators are computed and av eraged ov er the 75 different sim ula- tions, in order to get a more robust statistical index. Each sim ulation is related to a p erio d of 7 hours, during whic h ab out 500 PEV s get charged. Assuming that all the driv ers ha v e exactly the same w eigh ting co efficients in Equation (2), Fig. 5 illustrates the 3D plot when the weigh ts v ary b etw een 0 and 1, with a step size of 0.1. Since only combinations of weigh ts that 0.31 0.32 0.33 0.34 0.35 0.36 0.37 0.38 (i ep ) 20 40 60 80 100 120 Average charging time [min] (i ct ) 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5 Normalized distance between a PEV and the assigned CS (i d ) = (1, 0, 0) = (0, 0, 1) = (0, 1, 0) Fig. 5. Plot of the p erformance indices for 66 different com binations of the con v ex 3-tuple ( α 1 , α 2 , α 3 ), with a step size of 0.1. The diamonds correspond to extreme cases when only one of the three drivers interests considered is minimized. sum up to 1 are considered, then 66 ov erall cases app ear in the figure. In particular, diamonds are used to show the extreme cases when all users decide to optimize a single comp onen t of the cost function. Among other things, it is p ossible to observ e that charging times rise to ab out 110 min utes when all v ehicles aim at minimizing charging costs as all PEV s go to the cheapest CS, while charging times 2 https://www.enelx.com/it/it/mobilita- elettrica/prodotti/privati/servizi-x-rec harge 9 1 2 3 4 5 6 7 Time [h] 2 4 6 8 10 12 14 Average charging time [min] Average charging time: decentralized approach Average charging time: centralized approach Fig. 6. The blue dashed curve shows the av erage charging time in the decentralized stochastic approach, while the red solid line corre- sponds to the cen tralized deterministic case (optimal full-information solution). The a verage is computed ov er all CSs, and some CSs could be empty during the simulation time. reduce to ab out 16 min utes when all vehicles minimize the time required for charging. In this case, there are practically no queues at CSs and a very short trav el time to the station, since the av erage time for only charging is ab out 13.5 minutes. This result further emphasizes the importance of smart charging, intended as a smart assignmen t of PEV s to CSs. B. Centr alize d versus De c entr alize d This second section of results compares our sto chastic decen tralized algorithm with the deterministic centralized one. Recall that, in the sto chastic approach it is probable, but not guaranteed, that a vehicle is assigned to the optimal CS. Thus, in this sim ulation we wish to identify ho w sub optimal is the sto chastic decen tralized solution with resp ect to the deterministic centralized solution, that represen ts the b enchmark. In order to simplify the interpretation of this analysis, w e compare the tw o metho dologies in one setting, whic h is the one referring to the parameters configuration α = (1 , 0 , 0); similar results are obtained also for the remaining 3-tuple of α ’s. Configur ation: α = (1 , 0 , 0): in this case the only goal is to minimize the c harging time. Similar results to the ones of pap er [8] are obtained, since we just add the trav el time to the waiting time factor of the previous mo del. Fig. 6 sho ws the charging time of the whole system as a function of the time, and it is a mean v alue, including p ossibly empt y CSs. As can b e seen from the graph, the b ehaviour of the decentralized sto chastic approac h (dashed line) is v ery close to the optimal one (solid line): the RMSE (Root Mean Squared error) is ab out 0 . 5087 minutes, while on a v erage the charging time of the decentralized solution is ab out 5% more of that of the centralized case (8 minutes instead of 7 . 6 minutes). Fig. 7. Heat map of the city of Pisa, scenario 1: drivers interest is to minimize the charging cost. Blue circles represent the position of CSs in the city , and are colored based on their participation factor. C. R e alistic Simulations with SUMO In this section we in vestigate the prop osed approach using the mobility simulator SUMO in a realistic urban net w ork. F or this purp ose, we consider the road net w ork of the city-cen ter of Pisa, with 12 CSs, placed as shown in Fig. 7-8, according to the existing CSs net work 3 . In the first simulation, we mimic what could happ en if our prop osed assignment pro cedure is not used. In this case, it is realistic to assume that drivers quic kly learn av erage electricit y prices, and decide to get charged to a cheap CS along (or near) their typical driving patterns, as currently o ccurs for vehicles with an internal combustion engine. In the second sim ulation, our proposed assignment procedure is fully used, assuming that all drivers ha v e the same w eigh ts for all comp onents of their cost function (a similar result would b e obtained if the driving p opulation w ere divided in to equal groups of p eople aiming at minimizing c harging times, or charging distances, or charging prices). In this case, driving quan tities such us the tra vel time and the driving distance are computed by using a v ailable commands in SUMO, while in practical applications of our algorithm, they can b e easily recov ered by using p opular to ols and apps (e.g., Go ogle maps, Azure maps, etc..). Final results are summarized in the tw o heat maps (Fig. 7 and Fig. 8). It can b e clearly seen that in the first case most vehicles decide to get charged at the cheapest CSs, while more uniform utilization factors are achiev ed when the prop osed pro cedure is used. In the second case, it happens that c heap er (or nearer) CSs are initially taken, but when queues start forming then more exp ensiv e CSs ma y become more attractive as queues are shorter. The same result can b e also visualized through the bar plots shown in Fig. 9. In particular, it can be noticed that in the first case (driv ers minimizing c harging prices) all drivers choose the CSs where the prices are low er (b ecause a greater amount of energy is generated from 3 https://www.colonnineelettric he.it/ 10 Fig. 8. Heat map of the city of Pisa, scenario 2: drivers interest is to minimize all the three factors, that is the charging time, the price and the distance. Blue circles represent the position of CSs in the city , and are colored based on their participation factor. a) 1 2 3 4 5 6 7 8 9 10 11 12 Charging Station (id) 5 10 15 20 25 Percentage of assigned PEVs [%] = [0 1 0] = [1/3 1/3 1/3] b) 1 2 3 4 5 6 7 8 9 10 11 12 Charging Station (id) 0 2 4 6 8 Amount of energy generated from RES [kWh] Fig. 9. The bar plot a) shows the participation factor, which repre- sents the percentage of PEV s assigned to it during the simulation; in particular, PEV s interested in minimizing the costs are blue, while yello w indicates the PEV s which are in terested in all components of their cost function. Bar plot b) presents the energy generated by local RES of each CS. renew able sources, as shown in Fig. 9.b). On the other hand, in the second case driv ers take adv antage of the queuing information and b y using the prop osed algorithm a balancing effect is ac hieved among the CSs. D. Complianc e A nalysis As a final scenario to conclude our analysis, we ev aluate the p erformance of our algorithm in the even t that a fraction Q of the p opulation is not compliant with the prop osed sc heme, in order to provide a rationale for the DL T-based architecture presen ted in Section IV. T o tak e the compliance level of the p opulation in to account, we consider the following: whenever an agent “accepts” the assignmen t to station j recommended by the algorithm, the agent will in fact either comply with the accepted recommendation with probability Q , or it will just go to the nearest station with probability 1 − Q . Ob viously , the latter even t causes an inconv enience to the prop osed algorithm, as the agent will still show up in the queue of station j . T o ev aluate how the parameter Q affects the p erformance of the algorithm, we consider a scenario 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 Compliance Level 16 17 18 19 20 21 22 Average Charging Time [min] Fig. 10. A verage charging time for a car for differen t lev els of com- pliance. Results are obtained through 50 Monte Carlo simulations. in whic h every agent tries to minimize its charging time (i.e., α 1 = 1 , α 2 = α 3 = 0) and we show how this v ariable is affected when the parameter Q ranges in the in terv al [0 , 1]. F urthermore, due to the sto chastic nature of this setting, we take into account 50 Mon te Carlo sim ulations to av erage out the random fluctuations and obtain meaningful v alues. Results are shown in Fig. 10: as it is clear from visual insp ection, the av erage charging time decreases monotonically as the compliance level Q increases. This result highlights that compliance levels and their regulation (for instance, through the use of the pricing tokens mec hanism discussed in this pap er) represen t a critical element that, if left unchec ked, migh t lead to low levels of quality of service in P2P applications. VI. Conclusion and Future Lines of Research This pap er describ ed a nov el pro cedure to assign PEV s to the most conv enient CS in a fully decentralized manner. Assignmen ts are p ersonalized, as they take in to accoun t sp ecific, p ossibly differen t, interests and priorities of different driver. Moreov er we explored the use of an IoT architecture based on a p ermissioned DL T to enforce users compliance to the assignmen t scheme and thus to ac hiev e a satisfactory quality of service. The prop osed pro cedure has been illustrated through extensiv e simulations, and v alidated using the mobility sim ulator SUMO for the realistic case study of the city of Pisa in Italy . Sim ulations show the effectiveness of our approac h and indicate how users compliance represen ts a k ey factor that needs to b e taken into account to av oid p erformance degradation. The next step of this work foresees the practical implemen tation of the prop osed algorithm. As a first step, w e shall implement the p ermissioned DL T, a centralized v ersion of the algorithm, exploiting publicly a v ailable data (e.g., p osition and price) and the compliance mec hanism. Moreov er we plan to implement our system 11 in a smartphone app that can b e used by PEV driv ers. Ho w ever, our plan is to in volv e CSs to advertise themselves their av ailabilit y using priv ate information as well (e.g., queue lengths). References [1] Khan, M. A. and Salah, K., ”IoT security: Review, Blo ck chain solutions, and op en challenges”, F uture Generation Computer Systems, V ol. 82, pp. 395-411, 2018. [2] Miori, V. and Russo, D., ”Domotic ev olution towards the IoT’,’ IEEE 28th International Conference on Adv anced Information Netw orking and Applications W orkshops, pp. 809-814, 2014. [3] Bhatt, C., Dey , N. and Ashour, A. S., ”Internet of things and big data technologies for next generation healthcare”, Springer 2017. [4] F arhan, M. et al., ”IoT-based students interaction framework using attention-scoring assessment in eLearning”, F uture Gen- eration Computer Systems, V ol. 79, pp. 909-919, 2018. [5] F erraro, P ., King, C. And Shorten, R., “Distributed Ledger T echnology for Smart Cities, the Sharing Economy , and So cial Compliance”, IEEE A cc ess , V ol. 6, pp. 62728 - 62746, 2018 [6] Li, L., Ota, K. and Dong, M., ”When weather matters: IoT- based electrical load forecasting for smart grid”, IEEE Commu- nications Magazine, V ol. 55, No. 10, pp. 46-51, 2017. [7] Y eole, A. S. and Kalbande, D. R., ”Use of internet of things (iot) in healthcare: A survey”, Proceedings of the ACM Symp osium on W omen in Research, pp. 71-76, 2016. [8] H¨ ausler, F., Crisostomi E., Schlote, A., Radusc h, I. and Shorten, R., “Sto chastic Park-and-Charge Balancing for F ully Electric and Plug-in Hybrid V ehicles,” IEEE T ransactions on Intelligen t T ransp ortation Systems, V ol. 15, No. 2, pp. 895-901, 2014. [9] R ubinstein, A., ”Economics and psychology? The case of hyper- bolic discounting”, International Economic Review, V ol. 44 No. 4, 1207-1216. [10] Clemen t-Nyns, K., Haesen, E. and Driesen, J., “The impact of charging plug-in hybrid electric v ehicles on a residen tial distribution grid,” IEEE T ransactions on Po wer Systems, V ol. 25, No. 1, pp. 371-380, 2010. [11] Rigas, E. S., Ramch urn, S. D. and Bassiliades, N., “Managing Electric V ehicles in the Smart Grid Using Artificiale Intelligence: A Survey ,” IEEE T ransactions on Intelligen t T ransp ortation Systems, V ol. 16, No. 4, pp. 1619-1635, 2015. [12] Zheng, Y., Song, Y., Hill, D. J. and Meng, K., “Online Dis- tributed MPC-Based Optimal Scheduling for EV Charging Sta- tions in Distribution Systems,” IEEE T ransactions on Industrial Informatics, V ol. 15, No. 2, pp. 638-649, 2019. [13] Flammini, M. G. , Prettico, G. , Julea, A., F ulli, G., Mazza, A. and Chicco, G., “Statistical characterisation of the real trans- action data gathered from electric vehicle charging stations,” Electric Po wer Systems Research, V ol. 166, pp. 136-150, 2019. [14] Zoepf, S., Mack enzie, D. , Keith, D. and Chernicoff, W., “Charg- ing Choices and F uel Displacement in a Large-Scale Demonstra- tion of Plug-In Hybrid Electric V ehicles,” T ransp ortation Re- search Record: Journal of the T ransp ortation Research Board, V ol. 2385, pp. 1-10, 2013. [15] K on tou, E., Yin, Y. and Ge, Y. E., “Cost-Effective and Ecofriendly Plug-In Hybrid Electric V ehicle Charging Manage- ment,” T ransp ortation Research Record Journal of the T rans- portation Research Board, V ol. 2628, pp. 87-98, 2017. [16] Ma, Z., Callaw ay , D. S. and Hiskens, I. A., “Decen tralized Charging Con trol of Large P opulations of Plug-in Electric V ehi- cles,” IEEE T ransactions on Control Systems T echnology , V ol. 21, No. 1, pp. 67-78, 2013. [17] Chekired, D. A. and Khoukhi, L.,“Smart Grid Solution for Charging and Discharging Services Based on Cloud Computing Scheduling,” IEEE T ransactions on Industrial Informatics, V ol. 13, No. 6, pp. 3312-3321, 2017. [18] Jin, C., Sheng, X. and Ghosh, P .,“Optimized Electric V ehicle Charging With Intermitten t Renewable Energy Sources,” IEEE Journal of Selected T opics in Signal Pro cessing, V ol. 8, No. 6, pp. 1063-1072, 2014. [19] Etesami, S. R., Saad, W., Manda yam, N. and Poor, H. V., “Smart routing in smart grids,” 2017 IEEE 56th Annual Con- ference on Decision and Control (CDC), Melb ourne, VIC, pp. 2599-2604, 2017. [20] Zou, S., Ma, Z., Liu, X. and Hiskens, I. , “An Efficien t Game for Coordinating Electric V ehicle Charging,” IEEE T ransactions on Automatic Control, V ol. 62, No. 5, pp. 2374-2389, 2017. [21] Hu, L., Dong, J. and Lin, Z., “Mo deling charging b ehavior of battery electric vehicle drivers: A cumulativ e prospect theory based approach,” T ransp ortation Research Part C: Emerging T echnologies, V ol. 102, pp. 474-489, 2019. [22] Kahneman, D. and T versky , A., “Prosp ect Theory: An Analysis of Decision under Risk,” Econometrica, V ol. 47, No. 2, pp. 263- –291, 1979. [23] Rahmani-Andebili, M. and F otuhi-Firuzabad, M., “An Adaptiv e Approach for PEV s Charging Management and Reconfiguration of Electrical Distribution System Penetrated by Renewables,” IEEE T ransactions on Industrial Informatics, V ol. 14, No. 5, pp. 2001-2010, 2018. [24] Zeng, X., Xu, G., Zheng, X., Xiang Y. and Zhou, W., “E- AUA: An Efficient Anonymous User Authen tication Proto col for Mobile IoT,” IEEE Internet of Things Journal, V ol. 6, No. 2, pp. 1506-1519, 2019. [25] T ang X. , Bi, S. and Zhang, Y. A., “Distributed Routing and Charging Scheduling Optimization for Internet of Electric V ehicles,” IEEE Internet of Things Journal, V ol. 6, No. 1, pp. 136-148, 2019. [26] Sa v ari, G. F., Krishnasamy , V., Sathik, J., Ali, Z. M. and Ab del Aleem, S. H. E., “In ternet of Things based real-time electric vehicle load forecasting and charging station recommendation,” ISA T ransactions, V ol. 97, pp. 431-447, 2020. [27] Dorri, A., Kanhere, S. S., Jurdak, R. and Gaurav aram, P ., ”Blockc hain for IoT security and privacy: The case study of a smart home”, IEEE international conference on p erv asiv e com- puting and communications workshops (PerCom workshops), pp. 618-623, 2017. [28] Nakamoto, S., “Bitcoin: A p eer-to-p eer electronic cash system”, av ailable at https://bitcoin.org/bitcoin.pdf , 2008. [29] Samaniego, M. and Deters, R., ”Blo ck c hain as a Service for IoT”, IEEE International Conference on Internet of Things (iThings) and IEEE Green Computing and Communications (GreenCom) and IEEE Cyb er, Physical and Social Computing (CPSCom) and IEEE Smart Data (SmartData), pp. 433-436, 2016. [30] No v o, O., ”Blo ck c hain meets IoT: An architecture for scalable access management in IoT”, IEEE Internet of Things Journal, V ol. 5, No. 2, pp. 1184-1195, 2018. [31] P anarello, A., T apas, N., Merlino, G., Longo, F. and Puliafito, A., ”Blo ck c hain and iot integra tion: A systematic survey”, Sen- sors, V ol. 18, No. 8, pp. 2575, 2018. [32] Cullen, A., F erraro, P ., King, C. and Shorten, R., ”On the Re- silience of DA G-based Distributed Ledgers in IoT Applications”, IEEE Internet of Things Journal, 2020. [33] Dorri, A., Kanhere, S. S., Jurdak, R. and Gaura v aram, P ., ”Lsb: A light weigh t scalable Blo ck chain for iot security and priv acy” arXiv preprint arXiv:1712.02969, 2017. [34] Ov erk o, R., Ordo o ez-Hurtado, R., Zhuk, S., F erraro, P ., Cullen, A. and Shorten, R., ”Spatial Positioning T oken (SPT oken) for Smart Mobility”, 2019 IEEE International Conference on Connected V ehicles and Exp o (ICCVE), pp. 1-6, 2019. [35] Katsik ouli, P ., F erraro, P ., Timoney , D. and Shorten, R., ”On DICE-free Smart Cities, Particulate Matter, and F eedback- Enabled Access Control”, arXiv preprint 2019. [36] Chekired, D. A. and Khoukhi, L., “Optimal priority-queuing for EV charging-disc harging service based on cloud computing,” 2017 IEEE International Conference on Communications (ICC), Paris, pp. 1-6, 2017. [37] Esposito, C., De Santis, A., T ortora, G., Chang, H. and Cho o, K. K. R., “Blo ck chain: A Panacea for Healthcare Cloud-Based Data Security and Priv acy?” IEEE Cloud Computing, V ol. 5, No. 1, pp. 31-37, 2018. [38] P opov, S., “The T angle-V ersion 1.4.2”, av ailable at https://iota. org/IOT A Whitepap er.pdf , 2017 [39] Puthal, D., Malik, N., Mohanty , S. P ., Kougianos, E. and Das, G., “Everything Y ou W an ted to Know Ab out the Blo ck chain: Its Promise, Comp onen ts, Pro cesses, and Problems. ” IEEE Consumer Electronics Magazine, V ol. 7, No.4, pp. 6-14, July 2018. [40] Buterin, V. ”A next-generation smart con tract and decentral- ized application platform” white pap er, 3.37, 2014. 12 [41] European Environmen t Agency (EEA), “Electric vehicles in Europe,” EEA Rep ort No 20/2016, 26 September 2016. [42] Shepero, M. and Munkhammar, J., “Modelling charging of elec- tric vehicles using mixture of user b ehaviours,” 1st E- mobility integration symp osium, Berlin, 2017. Mic hela Mosc hella (S’19) received the Mas- ter’s degree in mathematics from the Univer- sity of Pisa, Italy , in 2015. She is currently a Ph.D. student with the Department of Energy , Systems, T erritory and Constructions Engi- neering, Universit y of Pisa. Her research in- terests include machine learning techniques for renewable p ow er generation forecasting mo del, and optimization of large-scale systems with applications to electric mobility and smart grids. Pietro F erraro received the Master’s degree in Robotics and control engineering and the PhD in con trol and electrical engineering from the Universit y of Pisa, Italy , in 2015 and in 2018. He is currently a Research Asso ciate with the Dyson school of design engineering at Imp erial College London. His research in- terests include control theory applied to the sharing economy domain. Eman uele Crisostomi (M’11–SM’16) re- ceived the Bachelor’s degree in computer sci- ence engineering, the Master’s degree in au- tomatic control, and the Ph.D. degree in au- tomatics, rob otics, and bio engineering, from the Universit y of Pisa, Italy , in 2002, 2005, and 2009, respectively . He is currently an As- sociate Professor of Electrotechnics with the Department of Energy , Systems, T erritory and Constructions Engineering, Universit y of Pisa. His researc h interests include con trol and opti- mization of large-scale systems, with applications to smart grids and green mobility networks. He is a co-author of the recently published bo ok: “Electric and Plug-in Hybrid V ehicle Netw orks: Optimization and Control” (Crisostomi, Shorten, St ¨ udli, Wirth), CRC Press, Se- ries: Automation and Control Engineering, 2017” and a co-editor of the up coming Springer Nature bo ok on “Analytics for the Sharing Economy: Mathematics, Engineering and Business Perspectives” . Rob ert Shorten graduated from UCD, with a B.E. degree in Electronic Engineering in 1990, and a Ph.D. degree in 1996. F rom 1993 to 1996, Professor Shorten work ed at Daimler- Benz researc h labs in Berlin where completed his Ph.D. work, and w as also the holder of a Marie Curie F ellowship. In 1996 he was invited to work as a visiting fellow at the Center for Systems Science, Y ale Univ ersity , commencing a long-standing researc h collaboration with Professor K. S. Narendra on the study of switched systems. Since returning to Ireland in 1997 as the recipient of a Europ ean Presidential F ellowship, Professor Shorten has been active in a num ber of the oretical and applied research areas including: computer netw orking; classical automotive research; collab orative mobility (including smart transp ortation and electric vehicles); as well as basic control theory and linear algebra. Professor Shorten is a co-founder of the Hamilton Institute, National Universit y of Ireland, Maynooth, where he was a F ull Professor until March 2013, and was also the holder of a Visiting Professorship at TU Berlin in 2011-12. F rom 2013 to 2015 he led the Control and Optimization activities at IBM Researc h Ireland in the area of Smart Cities. He w as Professor of Control Engineering and Decision Science at Universit y College Dublin (UCD) from 2015-2019 as well as consultant to IBM Researc h Ireland. He is currently Professor of Cyb er-physical Design at Imp erial College London. Professor Shorten is a co-author of the recently published b ooks: AIMD dynamics and distributed resource allocation (Corless, King, Shorten, Wirth, SIAM 2016). Plug-in Hybrid and Electric V ehicle Netw orks: Optimization and Control (Crisostomi, Shorten, St¨ udli, Wirth, CR C Press, Novem b er 2017).
Original Paper
Loading high-quality paper...
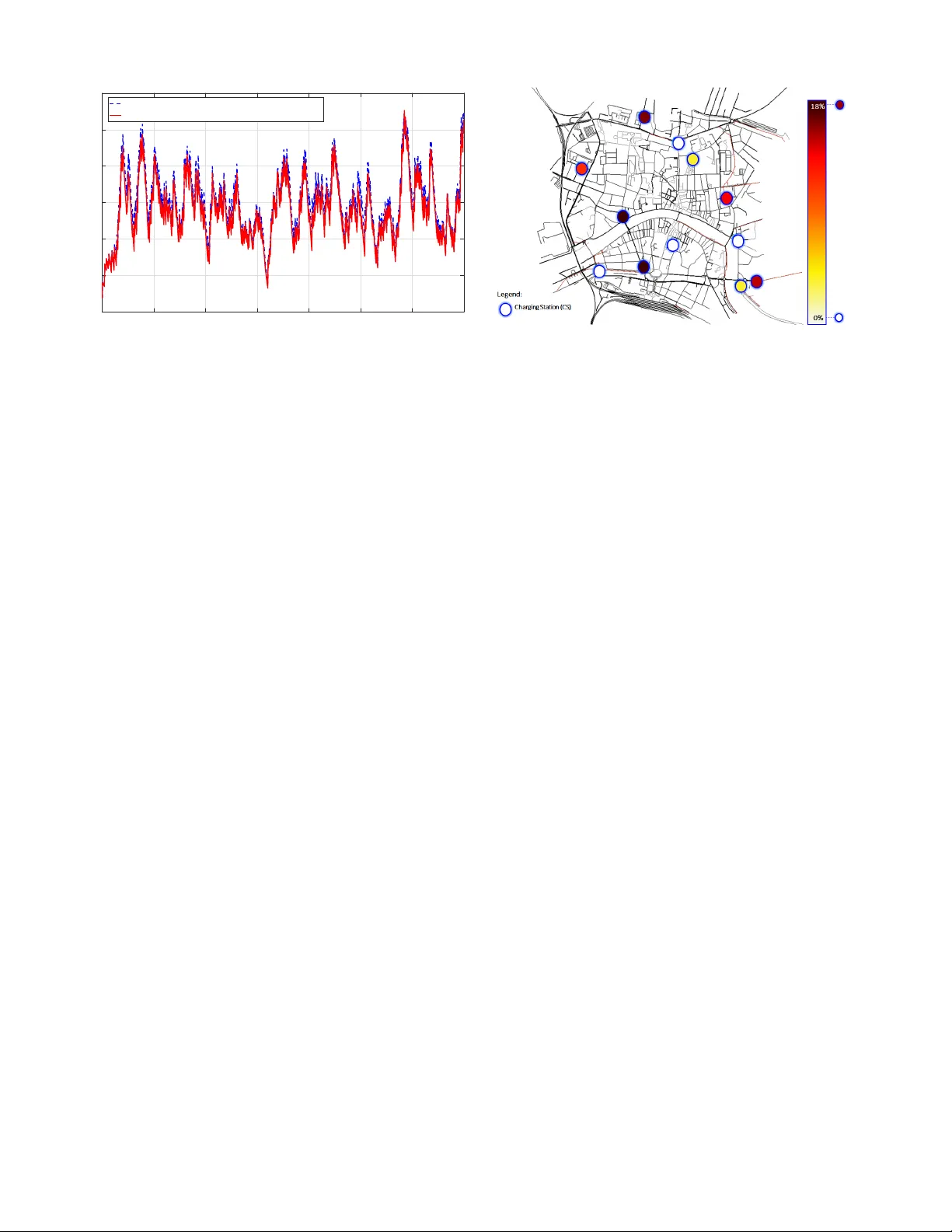
Comments & Academic Discussion
Loading comments...
Leave a Comment