A Game-Theoretic Analysis of the Social Impact of Connected and Automated Vehicles
In this paper, we address the much-anticipated deployment of connected and automated vehicles (CAVs) in society by modeling and analyzing the social-mobility dilemma in a game-theoretic approach. We formulate this dilemma as a normal-form game of pla…
Authors: Ioannis Vasileios Chremos, Logan Beaver, Andreas Malikopoulos
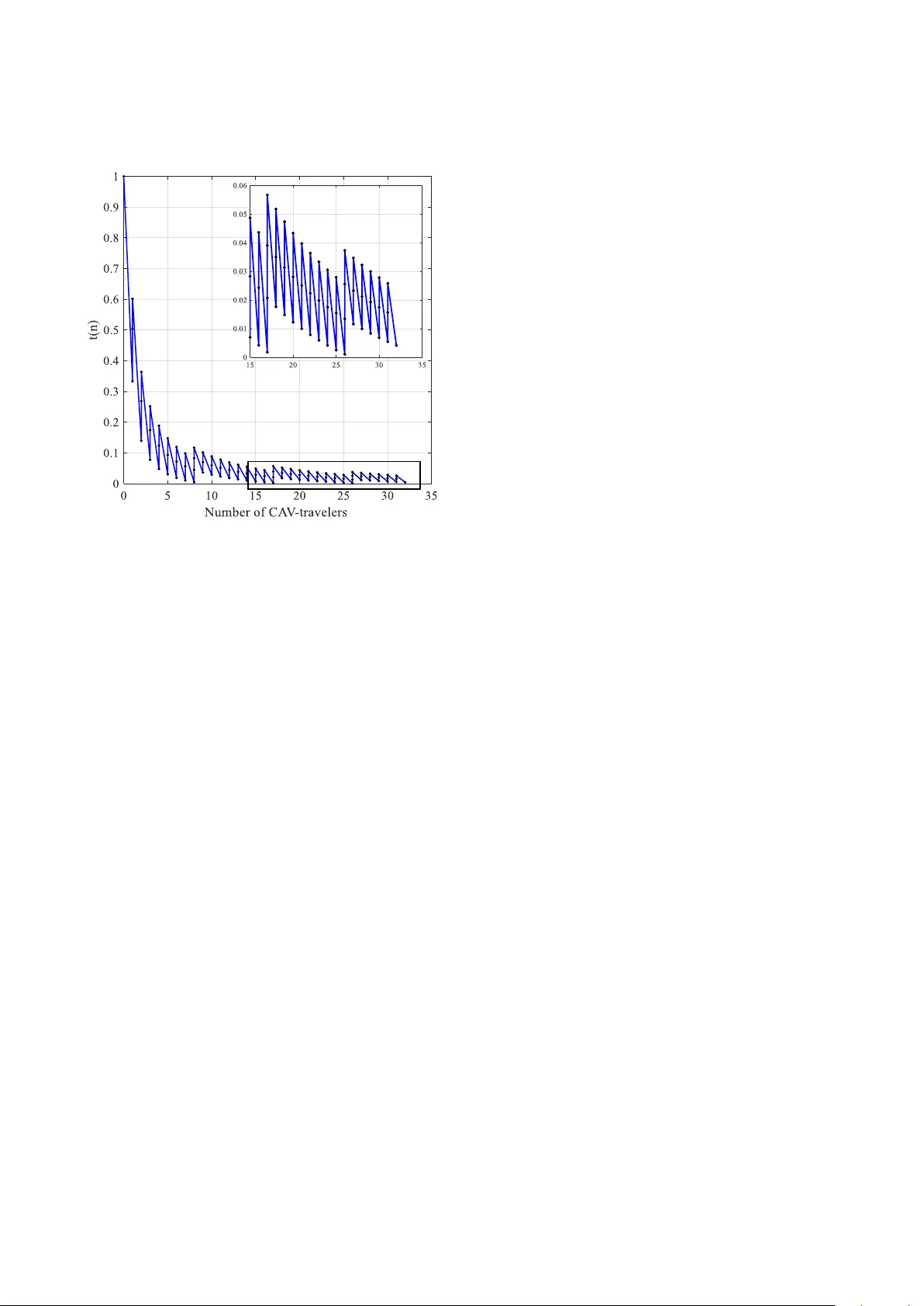
A Game-Theor etic Analysis of the Social Impact of Connected and A utomated V ehicles Ioannis V asileios Chremos, Student Member , IEEE , Logan E. Bea ver , Student Member , IEEE Andreas A. Malikopoulos, Senior Member , IEEE Abstract — In this paper , we address the much-anticipated deployment of connected and automated vehicles (CA Vs) in society by modeling and analyzing the social-mobility dilemma in a game-theoretic approach. W e formulate this dilemma as a normal-form game of players making a binary decision: whether to trav el with a CA V (CA V travel) or not (non- CA V travel) and by constructing an intuitive payoff function inspired by the socially beneficial outcomes of a mobility system consisting of CA Vs. W e show that the game is equivalent to the Prisoner’ s dilemma, which implies that the rational collective decision is the opposite of the socially optimum. W e present two different solutions to tackle this phenomenon: one with a prefer ence structur e and the other with institutional arrangements. In the first approach, we implement a social mechanism that incentivizes players to non-CA V travel and derive a lower bound on the players that ensur es an equilibrium of non-CA V travel. In the second approach, we investigate the possibility of players bargaining to create an institution that enfor ces non-CA V tra v el and show that as the number of players increases, the incentive ratio of non-CA V tra vel over CA V tra vel tends to zer o. W e conclude by showcasing the last result with a numerical study . I . I N T R O D U C T I O N The reality of connected and automated v ehicles (CA Vs) is coming fast to realization [1]. Similarly , with other past technologies, CA Vs promise to be an incoming disrupti v e in- nov ation with vast technological, commercial, and re gulatory dimensions. Recently , there has been a significant amount of work on the technological or social impact of CA Vs (mostly focusing on congestion, emissions, energy consumption, and safety). CA Vs will transform the transportation system of today and rev olutionize mobility . On the other hand, one expected social consequence of CA Vs is to reshape urban mobility in the sense of altered tendency-to-trav el, and thus, highly increase demand in the transportation system. T o elaborate on this point, e vident from similar technological rev olutions (e.g., ele v ators), human social tendencies and society’ s perspectiv e ha v e changed the way a technology is used and applied [2]. Thus, we can most certainly expect that the deployment of CA Vs in society will hav e unexpected outcomes, in the form of rebound effects (e.g., increased ov erall vehicle miles trav eled, decreased use of public trans- portation, higher demand for road usage, etc.) Although there This research was supported in part by ARP AE’s NEXTCAR program under the award number de-ar0000796 and by the Delaware Energy Institute (DEI). The authors are with the Department of Mechanical Engineering, Univ ersity of Delaware, Ne wark, DE 19716 USA (emails: ichremos@udel.edu;lebeaver@udel.edu; andreas@udel.edu.) hav e been numerous studies that provide qualitative analysis for the social impact [3], [4], our game-theoretical approach aims to provide a formal analysis of the human decision- making regarding the expected social-mobility dilemma of the future tra v elers. One may ask “Why do we use Game Theory to analyze such a problem?” It is the authors’ belief that the emer ging transportation systems - CA Vs, shared mobility , electric vehicles - will be characterized by their socio-economic complexity: (1) improved productivity and energy efficiency , (2) widespread accessibility , and (3) drastic urban redesign and e volv ed urban culture. This characteristic can naturally be modeled and analyzed using notions from Mathematical Psychology and Game Theory . One of the main arguments in this paper is that the social interaction of humans and CA Vs can be modeled as a “social dilemma. ” That is, we are only concerned with the impact of the human decision before the vehicle’ s engine is e ven turned on. Informally , a social dilemma is any situation where there is a subtle yet unwanted discrepancy between indi vidual and collecti v e interest. It is for this reason why the authors of this paper ar gue that social dilemmas are the appropriate models to be looking at instead of, for example, congestion games. W e want to emphasize that we are interested in the human choice of commute and not the selfish routing on a road network. By considering a normal-form game of n players, we acquire a significantly improv ed way to realistically model social dilemmas that occur in real-life, and most impor- tantly , we obtain a multiplayer structure that reflects Garrett Hardin’ s “Tragedy of the Commons. ” From its conception, the Tragedy of the Commons has been an important problem in economics and other fields as it describes a plethora of phenomena in which independent members of a society selfishly attempt to maximize their benefit of utilizing at least one common resource which is scarce. Thus, the individuals’ selfishness leads to the collective degradation of society’ s well-being. Noteworth y , e ven though the decision-makers are selfish and their decisions aim to maximize personal gain, they end up depleting the resource with unav oidable repercussions and losses [5]. In our context, the common resource is the road infrastructure shared by all the tra velers, and the utilization is whether to travel with a CA V or not. Intuitiv ely , one can expect that if all trav elers make the selfish decision to use a CA V for commuting, then congestion is unav oidable. In the first decades of the 20 th century , Arthur Cecil Pigou argued that “if a system’ s decision-makers take autonomous decisions, then the resulting collecti ve outcome most prob- ably will be inefficient. ” This ke y observation is evident in many dif ferent studies and analyses of in transportation problems. Social dilemmas hav e been extensiv ely studied for systems that exhibit overpopulation, resource depletion, gridlock, and pollution [6]–[8], while the Prisoner’ s dilemma (PD) game has been used to model vehicle congestion in a transportation network [9], [10] where travelers decide to continue driving their vehicles in congested and polluted cities. One possible solution to the PD was studied in [11] in which inspired from notions of classical arguments on the theory of social contract, the author inv estigated whether cooperation might emerge in a social dilemma game with institutional arrangements. Although the social effect of selfish-mobility behavior in routing networks of regular and autonomous vehicles has been studied [12], it seems that the problem of how CA Vs will af fect human tendency- to-trav el and mobility frequency has not been adequately approached yet. On the other hand, analytical frameworks hav e been proposed to quantify and ev aluate the impacts of CA Vs from the technological perspecti ve [13], [14]. Fur- thermore, coordination of CA Vs at different traffic scenarios, e.g., intersections or vehicle-following, have been extensi vely ev aluated in the literature [15], [16]. Recently , there has been research done on the rebound effects which might arise from the introduction of automation in a transportation system [17], [18]. For a detailed analysis of the effects of CA Vs technologies on trav el demand, see [19]. Recently , in the literature, it has been recognized that further research is required to identify and understand the potential impacts of emerging mobility [20], [21]. The contributions of this paper are: 1) we provide a game-theoretic analysis of the conflict of interest and model the social-mobility dilemma as a social dilemma, and 2) we apply two different in mindset mechanisms and approaches that attempt to prevent negati ve outcomes, e.g., similar to the Tragedy of the Commons. Sev eral research efforts reported in the literature have focused on studying social behavior regarding semi- autonomous driving and the selfish social decision-making of choosing a route to commute in a transportation network [22]. A key difference between our work and the frameworks already reported in the literature is that we focus on modeling the human decision-making of which mode of transportation to be used rather than modeling selfish routing. Ou r analysis will complement these efforts by providing a frame work that attempts to integrate the human social behavior in a mobility system consisting of CA Vs. Moreover , our work in this paper expands the much-needed discussion on understanding the social impact and implications of CA Vs by pro viding insights on how human behavior might react to an emerging mobility system. More specifically , our most important contrib ution is to rigorously sho w that without a well-thought interv ention via regulations or incentives, a society of selfish travelers will make the wrong collectiv e decisions, and thus, we will end up with a catastrophically sub-optimal performance of the emerging mobility system. The remaining of the paper proceeds as follo ws. In Section II, we provide an overvie w of Game Theory notions. In Section III, we present our formulation of the social decision- making regarding the CA Vs as a normal-form game and show that it is equiv alent to a PD g ame. In Section IV, we introduce and study a preference structure, and in Section V, we apply a frame w ork of institutions and provide a numerical study of the results. Finally , we offer some concluding remarks and discuss future work in Section VI. I I . M AT H E M A T I C A L P R E L I M I N A R I E S In this section, we present a brief o vervie w of important notions from non-cooperativ e Game Theory . First, we as- sume that the players of the game are rational , in the sense that each player’ s objecti ve is to maximize the e xpected v alue of her own payof f. In addition, we assume that the players are intelligent , i.e., each player has full knowledge of the game and has the ability to make any inferences about the game that we, the designers, can make. In order to de velop a rigorous frame work that analyzes the social dilemma as a game, we need to formally define a few important notions of Game Theory that will prove instrumental in our analysis. Definition 1. A finite normal-form game is a tuple G = hI , S , ( u i ) i ∈I i , where • I = { 1 , 2 , . . . , n } is a finite set of n players with n ≥ 2 ; • S = S 1 × · · · × S n , where S i is a finite set of actions av ailable to player i ∈ I with s = ( s 1 , . . . , s n ) ∈ S being the action profile; • u = ( u 1 , . . . , u n ) , where u i : S → R , is a real-valued utility function for player i ∈ I . Definition 2. Let S i be the strategy profile of player i , s i , s 0 i ∈ S i be two strategies of player i , and S − i be the set of all strategy profiles of the remaining players. Then, s i strictly dominates s 0 i if, for all s − i ∈ S − i , we hav e u i ( s i , s − i ) > u i ( s 0 i , s − i ) . Also, a strategy is strictly dominant if it (strictly) dominates any other strate gy . Definition 3. A player i ’ s best response to the strategy profile s − i = ( s 1 , . . . , s i − 1 , s i +1 , . . . , s n ) is the strategy s ∗ i ∈ S i such that u i ( s ∗ i , s − i ) ≥ u i ( s i , s − i ) for all s i ∈ S i . A strategy profile s is a Nash equilibrium (NE) if, for each player i , s i is a best response to s − i . Next, for completeness, we define the notion of Pareto domination. First, an “outcome” of a game is any strategy profile s ∈ S . Intuitively , an outcome that Pareto dominates some other outcome improv es the utility of at least one player without reducing the utility of an y other . Definition 4. Let G and s 0 , s ∈ S . Then a strategy profile s 0 Pareto dominates strate gy s if, u i ( s 0 ) ≥ u i ( s ) , for all i , and there exists some j ∈ I for which u j ( s 0 ) > u j ( s ) . Pareto domination is a useful notion to describe the social dilemma in a game. Howe v er , Pareto-dominated outcomes are often not played in Game Theory; a NE will always be preferred by rational players. For further discussion of the Game Theory notions presented above, see [23]. Next, we provide our formulation and sho w that it is equiv alent to the PD game. I I I . G A M E - T H E O R E T I C A L F O R M U L A T I O N W e consider a society of n ∈ N , n > 2 , trav elers who seek to commute on a city’ s transportation network. W e consider the road infrastructure as the common, yet limited, resource that is open-access and shared with all travelers. Each traveler has the option to utilize the roads by trav eling in a CA V , which in turn contributes to the capacity of the roads. W e e xpect each traveler to utilize the roads selfishly . Assumption 1. W e assume full CA V -penetration, and so each traveler may choose either to travel in a CA V or use another mode of transportation, e.g., train, light rail, bicycling, or walking, thereby not contributing to congestion. In a game-theoretic context, each traveler represents a rational player who has two possible actions, namely either N C for not traveling in a CA V (non-CA V tra vel) or C for trav eling in a CA V (CA V trav el). From now on, we shall use the terms “player” and “traveler , ” interchangeably . All players receiv e a benefit c ∈ R > 0 for deciding to commute in the society . On the other hand, tra veling using CA Vs con ve ys benefits arising from fle xibility , priv ac y , con venience, etc. So, if a player chooses to trav el in a CA V , then they receive a benefit of c + d , where d ∈ R > 0 with d · ( n − 2) > 2 (this ensures that d provides a significant incentive for CA V tra vel yet the lower bound decreases as n increases). Howe ver , trav eling in a CA V is naturally the selfish choice as it exploits the society’ s resources. Hence, for each player that decides to trav el in a CA V , a cost of e ∈ R > 0 is imposed to the society as a whole and is paid out equally by all players, i.e., we define φ = e/n as the damage done to society . Without losing any theoretical insight, let us define e = d + 1 and assume that the original benefit c is strictly greater than e . Remark 1. In our formulation, we want to captur e the potential consequence of the players’ decision to travel in a CA V . F or this r eason, contributing to the capacity of the r oads (cr eating congestion, pollution, etc.) is r epr esented by the cost and over all by the damag e done to society . W e can write the final form of player’ s i payoff for trav eling in a CA V as ( c + d ) − ( n − k ) φ , and accordingly , player’ s i payoff for not traveling in a CA V as c − ( n − k − 1) φ , where k is the number of players who choose not to travel in a CA V other than player i . Thus, the payoff function is f i ( s i , k ) = ( c − ( n − k − 1) φ, if s i = N C, c + d − ( n − k ) φ, if s i = C . (1) For player i the benefit of traveling in a CA V is denoted by f i ( C, k ) and the benefit of not traveling in a CA V by f i ( N C , k ) , where k is the number of players who decide to non-CA V travel other than player i . Note that (1) depends not only on player i ’ s o wn action b ut also on k . At this point, we can formally formulate our game denoted by G . W e hav e the finite set of players I = { 1 , . . . , n } with n > 2 ; for each player i the action set is s i ∈ { N C, C } , and f i ( s i , k ) with k = 0 , 1 , . . . , n − 1 is the payof f function of player i . Thus, our game can be represented by the follo wing tuple: G = hI , ( S i = { N C, C } ) i ∈I , ( f i ( s i , k )) i ∈I i . (2) Next, we fully characterize game G . Lemma 1. The payoff differ ence α = f i ( C, k ) − f i ( N C , k ) is positive and constant for all values k ∈ [0 , n − 1] and for all players i ∈ I . Furthermor e , f i ( N C , k ) and f i ( C, k ) ar e strictly increasing in k . Pr oof. W e have f i ( C, k ) = c + d − ( n − k ) φ and f i ( N C , k ) = c − ( n − k − 1) φ and so the difference is simply f i ( C, k ) − f i ( N C , k ) = c + d − ( n − k ) φ − [ c − ( n − k − 1) φ ] = d − φ . Hence, α is clearly positive by definition of c and d and also constant for all v alues k = [0 , n − 1] . Furthermore, for k > k 0 , we ha v e f i ( N C , k ) = c − ( n − k − 1) φ, and (3) f i ( N C , k 0 ) = c − ( n − k 0 − 1) φ. (4) Subtracting (4) from (3) giv es f i ( N C , k ) − f i ( N C , k 0 ) = ( k − k 0 ) φ > 0 , and so f i ( N C , k ) > f i ( N C , k 0 ) for all k . In similar lines, we can show that the benefit of CA V trav el, f i ( C, k ) , is strictly increasing in k . Therefore, we conclude that f i ( N C , k ) and f i ( C, k ) are strictly increasing in k . From now on, the payoff difference is denoted by α . W e observe that the payoff difference, interpreted as the non-CA V travel cost, increases as n increases. Interestingly enough, the payoff difference is independent of ho w many players choose not to trav el in a CA V . In game-theoretic terms, we can interpret this as the strategy CA V travel dominating strategy non-CA V travel with a degree that is constant and independent of the other players who choose to CA V tra vel. Lemma 2. The payoff function (1) is non-ne gative for all k ∈ [0 , n − 1] , i.e., f i ≥ 0 for all i ∈ I . Furthermor e, mutual non-CA V travel is pr eferr ed to mutual CA V travel, i.e., f i ( N C , n − 1) > f i ( C, 0) is a P areto r elation. Pr oof. W e have f i ( N C , 0) = c − ( n − 1) φ = c − ( d + 1) + φ and f i ( C, 0) = c + d − n · φ = c − 1 . As f i ( N C , k ) and f i ( C, k ) are increasing in k , the result follo ws. Also, we ha ve f i ( C, 0) = c − 1 and f i ( N C , n − 1) = c − ( n − ( n − 1) − 1) φ = c leading to f i ( N C , n − 1) > f i ( C, 0) for all i ∈ I . Lemma 2 establishes the fact that game G induces a Pareto relation, which implies that the equilibrium of mutual CA V trav el is Pareto inferior to the alternative outcome, i.e., all players choose to non-CA V trav el. This is significant since Pareto relations are directly associated with social dilemmas. Theorem 1. Game G defined in (2) is equivalent to the PD game as both games shar e an equivalent incentive structure . 0 5 10 15 20 25 Other Non-CAV Travelers 0 1 2 3 4 5 6 7 Payoff Non-CAV Travel CAV Travel f(D,0) k*-2 k*-1 n-1 Fig. 1. A visualization of the payoff function (1) ev aluated using the values d = 2 . 2827 , c = 4 . 2827 , and n = 25 . W e notice that, by focusing on the red circle, with a certain number of non-CA V travelers the overall utility of non-CA V travel is greater than the utility of CA V trav el. This is the true meaning of a social dilemma in a CA V transportation context. Pr oof. By Lemma 1, we hav e f i ( N C , k ) < f i ( C, k ) for all k ∈ [0 , n − 1] which implies that the dominant strategy by rational players in the game is CA V trav el no matter how many players decide to non-CA V travel. By Lemma 2, the social dilemma induced structure is equiv alent to that of the Prisoner’ s dilemma. Corollary 1. The game defined in (2) and the PD game pr o vide equivalent incentives to the players, and thus, they r esult in equivalent outcomes. Next, we show that by construction of the payof f function (1), non-CA V travel is more attractive from both the societal and the player’ s perspective. Proposition 1. Consider the game G defined in (2) . Note that the benefit of CA V travel is given by f i ( C, k ) and the cost of non-CA V travel given by α (i.e., the payoff differ ence). Then the strate gy non-CA V tr avel is socially desirable: nf i ( C, k + 1) − ( k + 1) α > nf i ( C, k ) − k α, ∀ i ∈ I (5) and also individually desirable: f i ( N C , k + 1) > f i ( N C , k ) , ∀ i ∈ I . (6) Pr oof. Both (5) and (6) can be v erified by substitution of the corresponding functions in (1). Before we continue, let us introduce the notation b x c , which denotes the greatest integer that is less than x . Proposition 2. Consider game G defined in (2) . Ther e e xists a unique integ er 2 ≤ k ∗ ≤ n given by k ∗ = j nd d +1 k + 1 such that f i ( N C , k ∗ − 2) < f i ( C, 0) < f i ( N C , k ∗ − 1) , (7) wher e k ∗ is the minimum number of non-CA V travelers. Pr oof. By substitution, we get the following equations: f i ( N C , k ∗ − 2) = c − ( n − ( k ∗ − 2) − 1) φ = c − ( n − k ∗ + 1) φ, (8) f i ( C, 0) = c − 1 , (9) f i ( N C , k ∗ − 1) = c − ( n − ( k ∗ − 1) − 1) φ = c − ( n − k ∗ ) φ. (10) W e want to find a unique k ∗ such that (7) holds. So, we ha ve c − ( n − k ∗ + 1) φ < c − 1 < c − ( n − k ∗ ) φ (11) which leads to nd d + 1 < k ∗ < nd d + 1 + 1 . (12) As k ∗ is an integer , the last inequality (12) is true if and only if k ∗ = j nd d +1 k + 1 and nd d +1 is not an integer number . Proposition 2 intuitively implies that we need at least k ∗ non-CA V travelers so that the benefit a player receives when they decide non-CA V trav el will be greater than the dominant strategy f ( C , 0) (see in Fig. 1 the red circle). Next, we seek a way to characterize an outcome of the game in terms of preference. Now , in most cases, identifying the “best” outcome is not possible, but there are certain situations that might be better from a societal standpoint. Proposition 3. The strate gy of universal CA V travel, f ( C, 0) , is P areto dominated by outcomes with k 0 ≥ k ∗ − 1 . Pr oof. W e want to sho w that the outcomes with k 0 ≥ k ∗ − 1 Pareto dominate the dominant strategy of uni versal CA V trav el. W e only have to check two cases, namely k 0 ≥ k ∗ − 1 and k 0 < k ∗ − 1 . F or k 0 = k ∗ − 1 , we hav e f i ( N C , k 0 ) = c − n − nd d + 1 − 1 φ. (13) Let j nd d +1 k = nd d +1 − ε , where ε > 0 , so that f i ( N C , k 0 ) = c − n − nd d + 1 − ε − 1 d + 1 n = c − 1 + ( ε + 1) φ. (14) Subtracting f i ( C, 0) from f i ( N C , k 0 ) giv es ( ε + 1) φ > 0 . Furthermore, for k 0 > k ∗ − 1 , note that f i is a strictly increasing function in k , thus f i ( N C , k 0 ) > f i ( N C , k ∗ − 1) which implies f i ( N C , k 0 ) > f i ( C, 0) . Thus, for all players i , f i ( N C , k 0 ) > f i ( C, 0) , where k 0 ≥ k ∗ − 1 . On the other hand, if k 0 < k ∗ − 1 , then f i ( N C , k 0 ) < f i ( C, 0) for all players i by the first inequality relation in Proposition 2. Hence, all outcomes which satisfy k 0 ≥ k ∗ − 1 Pareto dominate the dominant strate gy of univ ersal CA V travel. W e note that by construction, the payof f function (1) mutual non-CA V travel is the social optimum but, as a consequence of Proposition 3, the decision to non-CA V travel is worthwhile to a player only if there are k ∗ or more non- CA V trav elers. Otherwise, ev eryone is no worse off at the dominant strategy of univ ersal CA V trav el. This gives rise to the notion of the state of minimally effective non-CA V travel . Definition 5. The state of minimally ef fectiv e non-CA V trav el is the minimum number of non-CA V trav elers, k ∗ , such that an outcome Pareto dominates the univ ersal CA V trav el equilibrium. Clearly , the state of minimally effecti ve non-CA V tra vel is giv en by Propositions 2 and 3. This is an important notion that can help in the deriv ation of the optimal utilization of CA Vs in the emerging transportation systems. Next, we discuss tw o solution approaches applied in our game G . Our goal is to derive conditions that ensure a coalition of non-CA V travel, which are at least as large as the minimum state of non-CA V travel. I V . N A S H E Q U I L I B R I A A N D T H E P O P U L A T I O N T H R E S H O L D A. Pr efer ence Structur e Usually , in Game Theory , we assume that players are only interested in their o wn payof f. One of our goals is to study , in a more realistic setting, the players’ social behavior , and so we impose to our g ame G a “preference structure. ” A preference structure allows us to model a particularly interesting scenario: the rational players are interested not only on their own payoff but also on the relativ e payoff share they receive, i.e., ho w their standing compares to that of others [24]. The authors in [25] designed the “equity , reciprocity , and competition (ERC)” model which is a simple model capable of handling a large population of players with an “adjusted utility” function constructed on the premise that players are motiv ated by both their pecuniary payoff and their relati ve payoff standing. Notice that we changed our terminology of payoff function to adjusted utility function here. W e do this to differentiate the dif ference between the absolute payoffs that players get from (1) and the adjusted payoffs players will get in a preference structure. One of the reasons we use the ERC model is because it has been successful in explaining the behavior of selfish players in social experiments than other standard modeling techniques. Now , we observe that players rarely play against the same other players, and so it is reasonable enough to analyze each game as one-shot. T o further justify this, we only have to argue that it is highly unlikely to “meet” other trav elers in a major metropolitan city . Let the absolute payoff of player i be giv en by f i from (1). Each player i seeks to maximize the expected utility of her motiv ation function v i = v i ( f i , σ i ) , where σ i = σ i ( f i , γ , n ) = ( f i /γ , if γ > 0 , 1 /n, if γ = 0 . (15) Equation (15) represents player i ’ s relativ e share of the payoff and γ = P n j =1 f j is the total pecuniary payout. W e can think of the moti v ation function v i as the e xpected benefits that driv e the players’ beha vior . W e assume that v i is twice dif ferentiable. Next, we allo w each player to be characterized by a i /b i which is the ratio of weights that are attributed to the pe- cuniary and relative components of the moti v ation function. For example, strict relati vism is represented by a i /b i = 0 , so arg max σ i v i ( γ σ i , σ i ) = π = 1 / 2 , where π i ( γ ) is implicitly defined by v i ( γ π i , π i ) = v i (0 , 1 /n ) for π i ≤ 1 /n . Strict narrow self-interest is the limiting case a i /b i → ∞ , so arg max σ i v i ( γ σ i , σ i ) = 1 and s → 0 [25]. Based on the abov e, the adjusted utility function then is giv en by: u i ( f i , σ i ) = a i q ( f i ) + b i r ( σ i ) , (16) where q ( · ) is strictly increasing, strictly conca ve, and differ- entiable; r ( · ) is differentiable, concav e, and has its maximum at σ i = 1 /n . Let us discuss a simple e xample from [25]. Example 1. W e can explicitly define both q and r as: q ( f i ) = f i and r ( σ i ) = − 1 2 σ i − 1 n 2 , (17) where function q ( · ) expresses the standard preferences for the payoff functions (1); function r ( · ) describes in a precise way the collectiv e importance of equal di vision of the payoffs (this is also called the “comparati v e ef fect. ”) Consequently , the further the allocation mov es from player i recei ving an equal share, the higher the loss from the comparativ e effect. B. Analysis for the Nash Equilibria and the Threshold of Non-CA V T ravel Our analysis in this subsection follows [24], but we apply it to our game G defined in (2) along with the preference structure. Our goal is to study what influences strategic agents to non-CA V travel in our game G . W e start our analysis by looking at the necessary and sufficient conditions for player i to non-CA V tra vel, i.e., u i ( f i ( N C , k + 1)) ≥ u i ( f i ( N C , k )) . (18) Equiv alently , we have from [24] that a i /b i ≤ δ ( k ) , where δ ( k ) = r f i ( N C ,k +1) nf i ( C,k +1) − ( k +1) α − r f i ( C,k ) nf i ( C,k ) − k α q f i ( C, k ) − q f i ( N C , k + 1) . (19) From (19), we can deduce that player i will non-CA V travel if, and only if, there is overcompensation for the loss in absolute gain by moving closer to the average gain [24]. Hence, we can state the general conditions of a NE: a i /b i ≤ δ ( k − 1) , for k players non-CA V travel , (20) a i /b i ≥ δ ( k ) , for n − k players CA V travel . (21) W e no w have a better understanding of how the number of other non-CA V trav elers, and its value can make non-CA V trav el a rational strate gy . Lemma 3. F or a given distribution of ERC-types, δ ( k − 1) > 0 is necessary but not sufficient to get a coalition size of k wher e n − k players fr ee-ride. F or a given payoff structur e with δ ( k − 1) > 0 , ther e exist ERC-types suc h that k is an equilibrium coalition size . Pr oof. If δ ( k − 1) < 0 , it is impossible for a coalition to form in the game of size k . On the other hand, if a i /b i > δ ( k − 1) then condition (20) cannot hold for any player . Howe v er , conditions (20) and (21) imply that if δ ( k − 1) > 0 , then there are types ( a i /b i ) i ∈I such that k players non-CA V trav el and n − k players free-ride. Proposition 4. By construction of the game G together with the ERC pr efer ence structure , there always exists a Nash equilibrium of univer sal CA V travel. Proposition 4 follows directly from Lemma 3. W e are though interested in finding a threshold of players that decide to non-CA V travel. The next proposition will help us do that. Proposition 5. The necessary condition for an equilibrium of non-CA V travel δ ( k − 1) > 0 is equivalent to n [( k − 1) f i ( C, k ) − k f i ( C, k − 1)] + + [ nf i ( C, k − 1) − ( k − 1) α ] [2 k − n ] > 0 . (22) Pr oof. In order to obtain δ ( k ∗ − 1) > 0 , it is necessary that by choosing the strategy CA V travel, a player further deviates from the equal share 1 /n than by choosing strategy non-CA V tra vel, i.e., f i ( C, k − 1) nf i ( C, k − 1) − ( k − 1) α − 1 n > 1 n − f i ( N C , k ) nf i ( C, k ) − k α . (23) Rearranging and by eliminating the denominators, we get nf i ( C, k − 1)( nf i ( C, k ) − k α )+ + n ( f i ( C, k ) − α )( nf i ( C, k − 1) − ( k − 1) α ) − 2( nf i ( C, k − 1) − ( k − 1) α )( nf i ( C, k ) − k α ) > 0 , where we have used α = f i ( C, k ) − f i ( N C , k ) . Substituting the payoff functions from (1) and further simplification yield n [( k − 1) f i ( C, k ) − k f i ( C, k − 1)]+ n (2 k − n ) f i ( C, k − 1) − ( k − 1) α [2 k − n ] > 0 . (24) Simplifying (24) gi v es n [( k − 1) f i ( C, k ) − k f i ( C, k − 1)] + [ nf i ( C, k − 1) − ( k − 1) α ] [2 k − n ] > 0 . (25) Therefore, the result follo ws immediately . W e are now ready to prov e the main result of the section. Theorem 2. F or any given vector of types, a rational player chooses to non-CA V tr avel when at least half of the players non-CA V tr avel. Pr oof. W e only have to check on what conditions relation (22) is positi v e. By construction the payoff functions are non- negati v e, and thus nf i ( C, k − 1) − ( k − 1) α > 0 , i.e., nf i ( C, k − 1) − ( k − 1) α = n ( c − 1) + ( k − 1)(1 + φ ) (26) which is clearly positi ve for all values of n, c , and k . Hence, the second component of (22) is positiv e for 2 k − n > 0 . Next, we look at the first component of (22). By substituting the payoff function from (1), we get ( k − 1) f i ( C, k ) − k f i ( C, k − 1) = 1 − c, (27) which is negativ e for all values of c . W e observ e though that the second component is much bigger and dominates the first component as long as 2 k − n > 0 . Hence, relation (22) is positiv e and we ha ve δ ( k − 1) > 0 for 2 k > n . Therefore, for any giv en vector of types, if a player cooperates at the equilibrium, then at least half of the players cooperate. The interpretation of Theorem 2 is that for any coalition to exist with size k ≥ 2 , a minimum of n/ 2 players must join. W e showed that giv en the specific payof f structure of our game G and along with the ERC preference structure, a coalition of players choosing strategy non-CA V travel could be formed provided that it is rather large. Thus, ev en if we impose a social mechanism that enforces strate gy non-CA V trav el in a society of travelers and satisfying (22), a coalition of at least size n/ 2 must be formed to create an equilibrium of non-CA V trav el. Therefore, the social mechanism will require significant influence ov er the players’ behaviors in order to create a state of ef fecti ve non-CA V trav el. On the other hand, this result is promising as it shows that a social solution can potentially prev ent self-centered and destructive behavior to wards society . V . C R E AT I N G A N I N S T I T U T I O NA L A R R A N G E M E N T In this section, we take advantage of the equiv alenc y of our game G to the Prisoner’ s dilemma in order to use the non-cooperativ e game model of institutional arrangements framew ork of [11]. W e prove in Theorem 3 that the ratio of non-CA V tra vel and CA V tra v el in a deregulated society as the number of players increases, tends to zero. In other words, as the society becomes larger and larger , the incentiv e to cooperatively agree not to travel in a CA V tends to zero. Players are free to create a social institution that binds them by selecting their actions. In other words, players agree to hav e an institutional arrangement with the purpose of enforcing an agreement of non-CA V tra vel. The first stage is the creation of a social institution, and this is done through participation negotiations, and thus the first stage is called “participation decision stage. ” All players have to decide whether they will participate in negotiations for collective decision making, or not, without any knowledge of each others’ decisions. The outcome of the game at this first stage is either that some group of players is formed or not. All players decide to participate in negotiations or not based on their expectations about what will happen in the rest of the game. The possibility of non-CA V travel is significantly affected by the number of players. That means that the outcome of the institutional arrangements depends on the players’ decisions in the first stage [11]. Remark 2. In contrast to Cooper ative Game Theory , there is no e xternal binding enfor cement, and players ar e fr ee to make their decisions (whether it is beneficial to them only). Thus, we tr eat the institutional arrangements frame work as a non-cooperative game. The goal here is to in vestigate the question: does the number of travelers af fect the possibility of non-CA V travel? The next proposition addresses the basic cases. Proposition 6. ([11]) Let d i = 1 denote a player i ’ s decision to participate in bargaining for installing an enforcement agency; otherwise d i = 0 . When k ∗ = n , the participation decision stage has a unique solution d ∗ = (1 , . . . , 1) . It is interesting enough that in the special case n = 2 , both players agree to create an enforcement agency and also to non-CA V travel in the institutional arrangements. Definition 6. The incenti ve ratio of non-CA V tra vel and CA V trav el can be defined as a positiv e number giv en by: β = f i ( N C , k ∗ − 1) − f i ( C, 0) f i ( C, k ∗ − 1) − f i ( N C , k ∗ − 1) . (28) In words, β represents the ratio of players’ incentive to form the minimum group for non-CA V trav el, i.e., the group of k ∗ non-CA V trav elers, over their incenti ve to deviate unilaterally from the minimum group for non-CA V travel. Giv en our game G defined in (2), we ha ve β = k ∗ φ − d d − φ = k ∗ ( d + 1) − nd d ( n − 1) − 1 . (29) Proposition 7. ([11]) The uncooperative solution of the institutional arrangements for our game G pr escribes the following player behavior: 1) If n = j nd d +1 k + 1 = k ∗ , then all players participate in bargaining and the y a gree to non-CA V travel. 2) If n ≥ j nd d +1 k + 2 , then every player participates in bar gaining with pr obability t ( n ) satisfying: β = X k ∗ ≤ k ≤ n − 1 ( n − k ∗ ) · . . . · ( n − k ) k ∗ · . . . · k t 1 − t k − k ∗ +1 , wher e k ∗ and β ar e given by Proposition 2 and (29) , r espectively . W e are ready no w to prove our main result of this section, which has to do with the limiting beha vior of β . Theorem 3. As the number of players incr eases, the incen- tive ratio of non-CA V travel and CA V travel vanishes, i.e., β tends to zer o as n tends to infinity . Pr oof. Substitute k ∗ = j nd d +1 k + 1 into β to get β = j nd d +1 k + 1 ( d + 1) − nd d ( n − 1) − 1 . (30) By Proposition 2, nd d +1 is not an integer , thus we can write j nd d +1 k = nd d +1 − ε , where ε > 0 . No w taking the limit of β as n goes to infinity gi ves lim n →∞ β = lim n →∞ j nd d +1 k + 1 ( d + 1) − nd d ( n − 1) − 1 , (31) or equiv alently lim n →∞ β = lim n →∞ ( nd d +1 − ε + 1)( d + 1) − nd d ( n − 1) − 1 (32) = lim n →∞ nd + ( − ε + 1)( d + 1) − nd d ( n − 1) − 1 (33) = lim n →∞ ( − ε + 1)( d + 1) d ( n − 1) − 1 . (34) W e di vide both numerator and denominator by 1 /n and using the standard limit lim x →∞ 1 x = 0 gi ves the result, i.e., lim n →∞ ( − ε +1)( d +1) n d − lim n →∞ d n − lim n →∞ 1 n = 0 . (35) Thus, we conclude that lim n →∞ β = 0 . T o complement our understanding, we performed a numer - ical study of the limiting behavior of t ( n ) , given in T able I. In the table, we hav e included the additional probabilities: p A ( n ) sho ws the probability of some group of size k ∗ or greater reaching an agreement, p I ( n ) the probability of each player being an insider of some group with at least k ∗ non- CA V trav elers, and p F ( n ) is the probability of each player being a free rider , i.e., existing outside of a group of at least k ∗ non-CA V tra velers. n k ∗ β t ( n ) p A ( n ) p I ( n ) p F ( n ) 3 3 0.930 1.000 1.000 1.000 0.000 4 3 0.166 0.333 0.111 0.086 0.025 5 4 0.253 0.503 0.192 0.160 0.032 6 5 0.302 0.602 0.236 0.204 0.031 7 5 0.066 0.139 0.001 0.001 0.000 8 6 0.129 0.269 0.006 0.005 0.001 9 7 0.175 0.363 0.014 0.011 0.003 10 7 0.037 0.078 0.000 0.000 0.000 11 8 0.083 0.174 0.000 0.000 0.000 12 9 0.120 0.252 0.000 0.000 0.000 13 9 0.023 0.048 0.000 0.000 0.000 14 10 0.059 0.124 0.000 0.000 0.000 15 11 0.089 0.188 0.000 0.000 0.000 20 14 0.034 0.072 0.000 0.000 0.000 25 17 0.002 0.004 0.000 0.000 0.000 30 21 0.033 0.070 0.000 0.000 0.000 35 24 0.011 0.023 0.000 0.000 0.000 40 28 0.033 0.069 0.000 0.000 0.000 45 31 0.016 0.033 0.000 0.000 0.000 50 34 0.002 0.004 0.000 0.000 0.000 T ABLE I N U ME R I C AL S TU DY F OR G A ME G W I T H T H E I N S T IT U T I ON AL A R RA N G E ME N T S W H E R E d ≈ 2 . From Theorem 3, the incentive ratio goes to zero as the number of players increases. In addition, from the numerical study summarized in T able I and Figure 2, the likelihood of Fig. 2. Plot of t ( n ) as a function of the number of CA V travelers. The blue line sho ws the sequence of t ( n ) as n increases from 0 to 100 . bargaining for an institution, t ( n ) and probability of being an insider, p A ( n ) approach zero as n gets large. This implies that for large societies, the impact of self-realized non-CA V trav el is non-existent, and the universal CA V trav el strategy dominates. For small societies with k ∗ = n , it is a certainty that players agree to bargain and create an institution for CA V tra vel (which is not ideal). V I . C O N C L U S I O N In this paper , we addressed the problem of the social consequences of decision-making of human interaction with connectivity and automation in a game-theoretic setting. W e formulated the problem as a multiplayer normal-form game and showed that the incentiv e structure is equiv alent to the PD game. The proposed approach has the benefit of capturing the social dilemma that is expected to arise from the future social-mobility dilemma. W e considered two different approaches: one w as with a preference structure and one with institutions. W e in vestigated and deriv ed conditions for the unselfish strategy , i.e., non-CA V tra vel, to appear in the g ame. In the first case, we came up with conditions for a NE and deri ved a threshold for non-CA V trav el; in the second case, we allowed players to create an institution that can enforce non-CA V travel. W e concluded that the incentive ratio of non-CA V trav el over CA V trav el tends to zero as the number of players increases. Ongoing work includes the design of a framework that analyzes the impact of decision-making by relaxing the assumptions of complete information (e.g., inducing a Bayesian setting) aiming to capture the informational lim- itations of players in the g ame. R E F E R E N C E S [1] G. Marletto, “Who will dri ve the transition to self-driving? A socio- technical analysis of the future impact of automated vehicles, ” T echno- logical F or ecasting and Social Change , vol. 139, pp. 221–234, 2019. [2] A. Bernard, Lifted: A Cultural History of the Elevator . NYU Press, 2014. [3] J. P . Zmud and N. S. Ipek, “T owards an understanding of the travel behavior impact of autonomous vehicles, ” Tr ansportation r esearch pr ocedia 25 , pp. 2500–2519, 2017. [4] M. T aiebat, A. L. Brown, H. R. Safford, S. Qu, and M. Xu, “ A re view on energy , en vironmental, and sustainability implications of connected and automated vehicles, ” Envir onmental Science & T echnology , vol. 52.20, pp. 11 449–11 465, 2018. [5] R. M. Dawes, “The commons dilemma game: An n-person mixed- motiv e game with a dominating strategy for defection, ” ORI Research Bulletin , vol. 13.2, pp. 1–12, 1973. [6] M. Dawes, “Social dilemmas, ” Annual re view of psychology , vol. 31.1, pp. 169–193, 1980. [7] J. Platt, “Social traps, ” American Psyc hologist , vol. 28, pp. 641–651, 1973. [8] P . C. Stern, “Psychological dimensions of global environmental change, ” Annual Review of Psycholo gy , vol. 43, pp. 269–302, 1992. [9] M. S. Joshi, V . Joshi, and R. Lamb, “The prisoners’ dilemma and city- centre traffic, ” Oxfor d Economic P apers , vol. 57.1, pp. 70–89, 2005. [10] J. Whitelegg, Critical Mass: T ransport, Envir onment and Society in the T wenty-first Century . Pluto Press, 1997. [11] A. Okada, “The possibility of cooperation in an n-person prisoners’ dilemma with institutional arrangements, ” Public Choice , v ol. 77.3, pp. 629–656, 1993. [12] N. Mehr and R. Horowitz, “Can the presence of autonomous vehicles worsen the equilibrium state of traffic networks?” IEEE Conference on Decision and Control (CDC) , 2018. [13] J. Rios-T orres and A. A. Malikopoulos, “Energy impact of different penetrations of connected and automated vehicles: a preliminary assessment, ” Proceedings of the 9th ACM SIGSP A TIAL International W orkshop on Computational T ransportation Science , 2016. [14] ——, “ An overvie w of driver feedback systems for efficiency and safety , ” 2016 IEEE 19th International Confer ence on Intelligent T rans- portation Systems (ITSC) , 2016. [15] A. A. Malikopoulos, C. G. Cassandras, and Y . J. Zhang, “ A decen- tralized ener gy-optimal control frame work for connected automated vehicles at signal-free intersections, ” Automatica , vol. 93, pp. 244– 256, 2018. [16] J. Rios-T orres and A. A. Malikopoulos, “ A surve y on the coordination of connected and automated vehicles at intersections and merging at highway on-ramps, ” IEEE T ransactions on Intelligent T ransportation Systems , vol. 18.5, pp. 1066–1077, 2017. [17] P . A. Singleton, “Discussing the “positiv e utilities” of autonomous vehicles: will travellers really use their time productively?” T ransport Reviews , vol. 39.1, pp. 1–16, 2018. [18] A. Soteropoulos, M. Berger , and F . Ciari, “Impacts of automated vehicles on travel behaviour and land use: an international revie w of modelling studies, ” T ransport Reviews , vol. 39.1, pp. 29–49, 2019. [19] J. Auld, V . Sokolov , and T . S. Stephens, “ Analysis of the effects of connected-automated vehicle technologies on tra vel demand, ” Journal of the T ransportation Researc h Boar d (2625) , pp. 1–8, 2017. [20] R. Sarkar and J. W ard, “DOE smart mobility: Systems and modeling for accelerated research in transportation, ” Road V ehicle Automation , vol. 3, pp. 39–52, 2016. [21] L. Zhao and A. A. Malikopoulos, “Enhanced mobility with connectiv- ity and automation: A revie w of shared autonomous vehicle systems, ” IEEE Intelligent T ransportation Systems Magazine , 2020. [22] N. Mehr and R. Horo witz, “Pricing traffic netw orks with mixed vehicle autonomy , ” IEEE American Control Confer ence (A CC) , 2019. [23] Y . Shoham and K. Leyton-Bro wn, Multiagent Systems: Algorithmic, Game-Theor etic, and Logical F oundations . Cambridge Uni versity Press, 2008. [24] P . Michiardi and R. Molva, “ Ad hoc networks security , ” ST Journal of System Resear ch , 2003. [25] G. E. Bolton and A. Ockenfels, “ERC: a theory of equity , reciprocity , and competition, ” The American Economic Review , vol. 90, pp. 166– 193, 2000.
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment