Combining Learning and Model Based Control via Discrete-Time Chen-Fliess Series
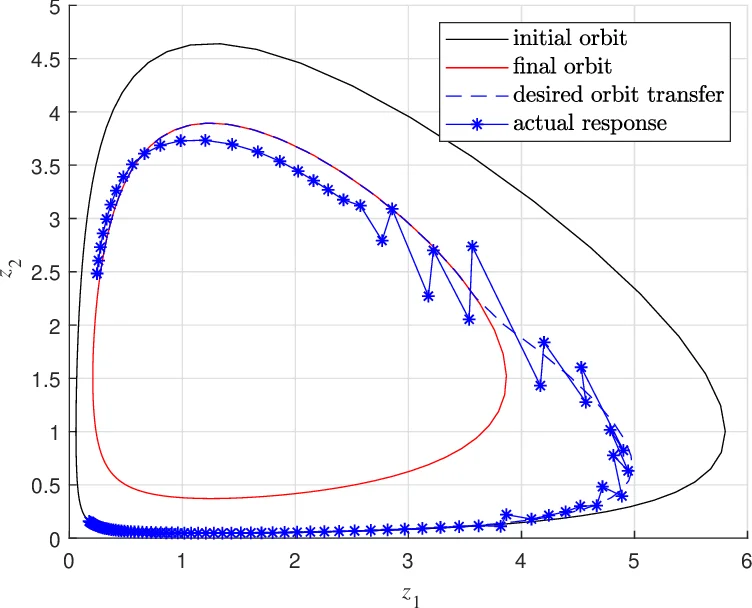
A learning control system is presented suitable for control affine nonlinear plants based on discrete-time Chen-Fliess series and capable of incorporating knowledge of a given physical model. The underlying noncommutative algebraic and combinatorial structures needed to realize the multivariable case are also described. The method is demonstrated using a two-input, two-output Lotka-Volterra system.
💡 Research Summary
The paper introduces a novel learning‑control architecture for control‑affine nonlinear plants that leverages discrete‑time Chen‑Fliess series. The authors begin by reviewing the limitations of prevailing adaptive‑control techniques such as artificial neural networks, recurrent networks, and reinforcement‑learning approaches, noting their lack of rigorous theoretical guarantees, high computational load, and reliance on linearization or gain‑scheduling. They then recall that any analytic control‑affine continuous‑time system can be represented by a Fliess operator—a non‑commutative formal power series over an alphabet of symbols representing the input channels.
By discretizing the time axis, the authors define a discrete‑time Fliess operator ˆF_c
Comments & Academic Discussion
Loading comments...
Leave a Comment