Positive Aging Admits Fast Asynchronous Plurality Consensus
We study distributed plurality consensus among $n$ nodes, each of which initially holds one of $k$ opinions. The goal is to eventually agree on the initially dominant opinion. We consider an asynchronous communication model in which each node is equipped with a random clock. Whenever the clock of a node ticks, it may open communication channels to a constant number of other nodes, chosen uniformly at random or from a list of constantly many addresses acquired in previous steps. The tick rates and the delays for establishing communication channels (channel delays) follow some probability distribution. Once a channel is established, communication between nodes can be performed instantaneously. We consider distributions for the waiting times between ticks and channel delays that have constant mean and the so-called positive aging property. In this setting, asynchronous plurality consensus is fast: if the initial bias between the largest and second largest opinion is at least $\sqrt{n}\log n$, then after $O(\log\log_\alpha k\cdot\log k+\log\log n)$ time all but a $1/ \text{polylog } n$ fraction of nodes have the initial plurality opinion. Here $\alpha$ denotes the initial ratio between the largest and second largest opinion. After additional $O(\log n)$ steps all nodes have the same opinion w.h.p., and this result is tight. If additionally the distributions satisfy a certain density property, which is common in many well-known distributions, we show that consensus is reached in $O(\log \log_\alpha k + \log \log n)$ time for all but $n/\text{polylog } n$ nodes, w.h.p. This implies that for a large range of initial configurations partial consensus can be reached significantly faster in this asynchronous communication model than in the synchronous setting.
💡 Research Summary
The paper studies the plurality consensus problem in a fully asynchronous distributed system. There are n nodes, each initially holding one of k opinions, and the goal is to have all nodes eventually agree on the opinion that was initially most frequent, provided that the initial bias between the largest and second‑largest opinion is sufficiently large (at least √n·log n in absolute terms). The authors introduce a model where two sources of asynchrony are present: (i) the time between successive activations (“ticks”) of each node, and (ii) the delay required to establish a communication channel after a node decides to contact another node. Both random variables are assumed to have constant mean and to satisfy the positive aging property (also known as increasing failure rate). This property holds for many common distributions such as exponential, Rayleigh, Weibull with shape ≥ 1, and Gamma with shape ≥ 1.
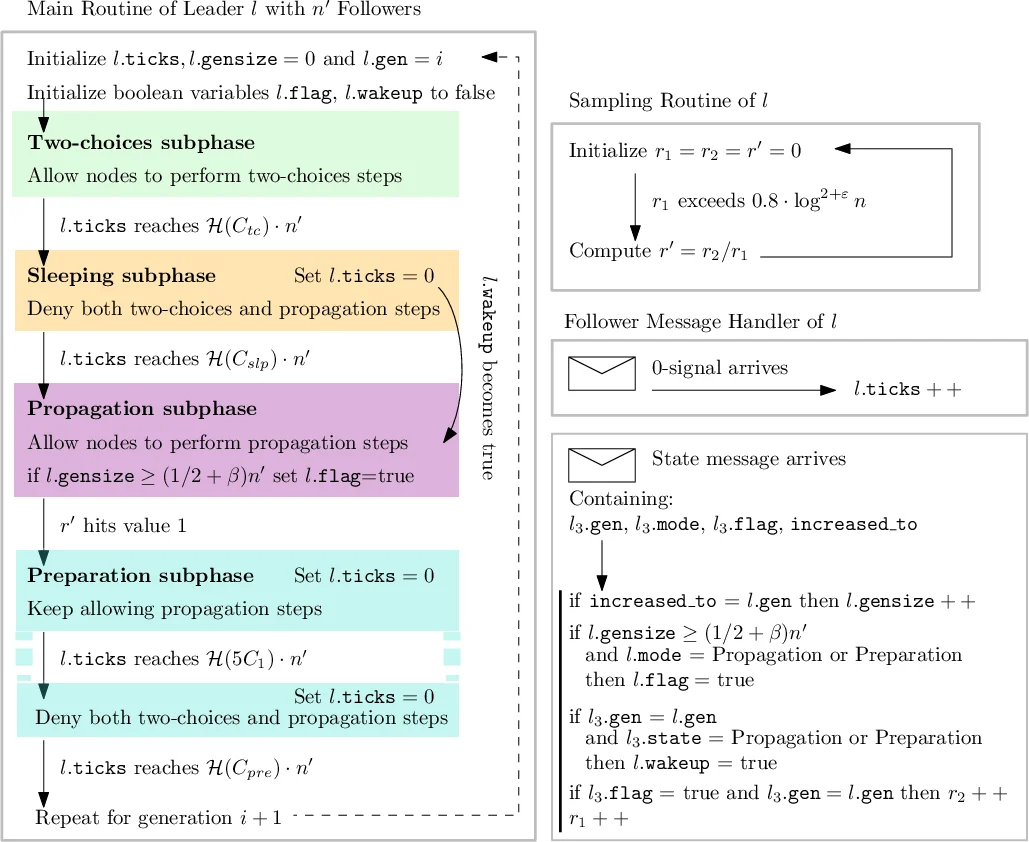
The core algorithm is built around the notion of generations. Each node stores its current generation number. When a node’s clock ticks, it samples two other nodes (uniformly at random or from a small remembered address list). If the two sampled nodes belong to the same generation i, that generation is at least as high as the caller’s generation, both sampled nodes share the same opinion, and the population of generation i is large enough, the caller performs a two‑choices step: it adopts the sampled opinion and increments its generation to i + 1. Otherwise the node executes a propagation step, adopting the generation and opinion of the sampled node with the highest generation (breaking ties arbitrarily). This alternating scheme ensures that as generations increase, the ratio between the dominant and the second‑largest opinion grows roughly quadratically, i.e., α_{i+1} ≈ α_i^2. Consequently, after only O(log log_α k) generations the dominant opinion occupies almost the entire generation, and any node that reaches this generation already holds the initial plurality opinion.
To coordinate the creation of new generations without a global clock, the authors introduce a base station (or leader) with O(log n) bits of memory. The base station stores the highest generation currently allowed and a binary flag indicating whether nodes should perform two‑choices or propagation steps. When a node becomes active, it contacts the base station and two random peers. If the flag permits a two‑choices step and the base station’s generation exceeds the node’s own, the node attempts the two‑choices rule; otherwise it propagates. The base station counts “incoming signals” from nodes; after receiving Θ(n) signals it flips the flag, thereby authorising the next generation. This mechanism provides a lightweight global synchronization point while preserving the asynchronous nature of ticks and channel delays.
The analysis proceeds in two main parts. First, using the positive aging assumption, the authors show that the expected time for a tick or a channel establishment is O(1). Hence the time needed for a generation to gather Θ(n) signals is O(log log k · log k + log log n) with high probability. Second, they prove that the bias α = a_0/b_0 (where a_0 and b_0 are the initial fractions of the largest and second‑largest opinions) grows doubly exponentially across generations, leading to rapid domination of the plurality opinion. After the above generation‑building phase, an additional O(log n) steps suffice to bring the remaining minority nodes into agreement, yielding a total convergence time of O(log log_α k·log k + log log n + log n) with high probability. This bound is shown to be tight.
If the tick and delay distributions also satisfy a q‑density property (a mild regularity condition met by exponential, Rayleigh, and Weibull with shape ≥ 1), the algorithm can be simplified: the two‑choices phase can be omitted, and pure propagation already achieves consensus in O(log log_α k + log log n) time for all but n/polylog n nodes. This improves upon the best known synchronous bounds, which require at least Ω(log n) rounds for comparable bias levels.
An auxiliary technical contribution is a new tail bound for the Pólya‑Eggenberger distribution, which the authors use to control the random fluctuations in the number of nodes per generation during the stochastic growth process.
In summary, the paper demonstrates that, under realistic stochastic timing assumptions (positive aging), plurality consensus can be achieved dramatically faster in an asynchronous setting than in synchronous models. The combination of generation‑based dynamics, a lightweight leader for global coordination, and careful probabilistic analysis yields a high‑probability convergence time that is logarithmic in the logarithm of the number of opinions and the system size, breaking previously known lower bounds for synchronous protocols. This work opens new avenues for designing fast, robust consensus mechanisms in real‑world networks where asynchrony and communication delays are unavoidable.
Comments & Academic Discussion
Loading comments...
Leave a Comment