Backprop Diffusion is Biologically Plausible
The Backpropagation algorithm relies on the abstraction of using a neural model that gets rid of the notion of time, since the input is mapped instantaneously to the output. In this paper, we claim that this abstraction of ignoring time, along with t…
Authors: Aless, ro Betti, Marco Gori
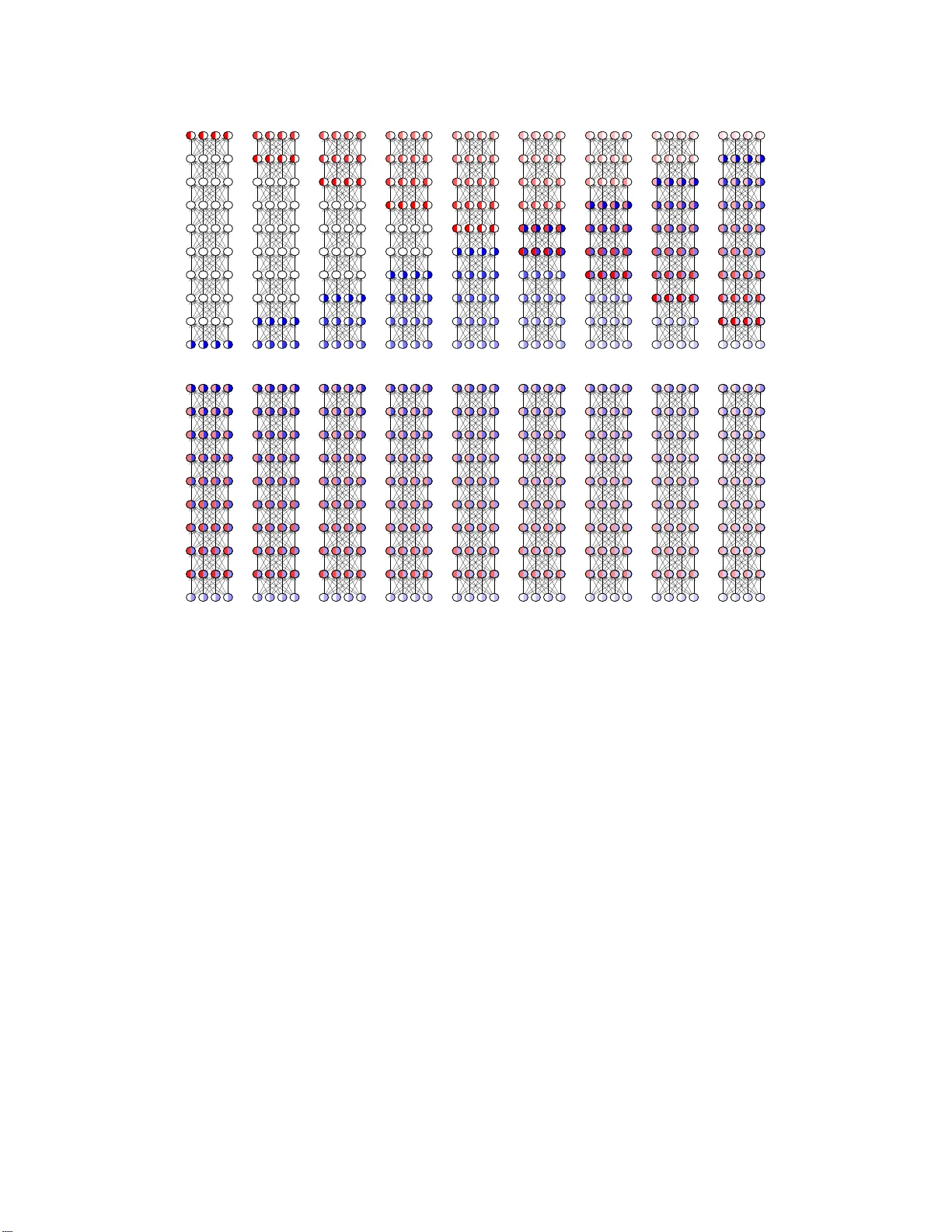
Backprop Diffusion is Biologi cally Plausible Alessandro Betti 1 , Marco Gori 1 , 2 1 DIISM, University of Siena, Siena, Italy 2 Maasai, Uni versitè Côte d’ A z ur, Nice, France {ales sandr o.bet ti2,marco.gori}@unisi.it Abstract The Back propa g ation algorithm relies on th e abstra c tio n o f using a n eural model that g ets rid of the notion of time, since the inpu t is m apped instanta n eously to the output. In this paper, we c laim that this abstraction of ignor ing tim e, along with the abrupt input chan ges that occur when feeding the training set, are in fact the reasons why , in som e p apers, Backp rop biological plausibility is r egarded as an arguable issue. W e show that as soon as a deep feedforward network operates with neuron s with time -delayed response, the b ackpro p weight upd ate turns out to be the ba sic equation of a biologically plausible diffusion process based on forward- backward waves. W e also show that such a proce ss very well appr oximates th e gradient fo r inpu ts that a r e not too fast with respect to the depth of the network. These rem a rks somewhat disclose the dif fusion process be h ind the backpro p equa- tion and leads us to in terpret the correspon ding alg orithm as a degener ation of a more gene r al dif fusion process that takes place also in neural networks with cyclic connectio ns. 1 Intr oduction Backprop agation enjoys t he pro perty of being an o ptimal algorithm for grad ient compu tation, which takes Θ( m ) in a feed forward network with m weigh ts [8, 9]. It is worth men tioning that the gra- dient compu tation with classic numerica l algorithm s would take O ( m 2 ) , which clear ly shows th e impressive advantage that is gained for now adays b ig network s. Howe ver , sin c e its co nception , Back- propag ation h as b e en the target of criticisms concernin g its biologic a l plausibility . Stefan Gro ssberg early pointed out the transport pr o blem that is inheren tly connected with the algorithm. Basically , for each neur o n, the delta error must be “tr a nsported ” for updating the weig hts. Hence, the algo- rithm re q uires each neuro n the availability of a precise knowledge of all of its d ownstream synapses. Related commen ts were given by F . Crick [6], who also poin ted ou t that backp rop seems to requ ire rapid circulatio n of the delta error bac k along axo ns from the synaptic outpu ts. I nterestingly enou gh, as discussed in the following, this is consistent with the ma in result of this paper . A nu mber o f studies hav e suggested solu tions to the weight transport p roblem . Recently , Lillicrap et al [11] ha ve suggested that random synap tic feedback weights can supp ort error back prop agation. However , any interpretatio n which neglects the role of time mig ht not fully capture the essence of biological plau- sibility . The intrigu ing marriage between energy-ba sed mod els with object function s fo r supervision that gives rise to Equilibrium Propag ation [12] is definitely better suited to capture the role o f time. Based the full trust on the role o f temporal ev olution, in [ 1], it is pointed ou t that, like other laws o f nature, learning can be formulated under th e framework of variational prin ciples. This paper spring s out from recent studies on the problem of learnin g visual features [3, 4, 2] and it was also stimulated by a nice analysis on the interp retation of Newtonian mechanics equations in the v ariational fram ework [10]. It is sho wn that when shifting f rom algorithms to laws of learning , one can clea r ly see the emergen ce o f the bio lo gical plausibility of Backpr op, an issue th at has been controversial since its spectacular impact. W e claim that the a lg orithm does r epresent a sor t o f d egen- Preprint. Under re vie w . t t + 1 t + 2 t + 3 t + 4 t + 5 t + 6 t + 7 t + 8 Figure 1: Fo rward and backward wav es on a t en-le vel network when the i nput and the supervision are kept con- stant. When selecting a certain frame—defined by the ti me inde x—the gradien t can consistently be computed by Backpropagation on “red-blue neurons”. eration of a natura l spatiote m poral dif fusion process that can clearly be und erstood when thinking of p erceptual tasks like speech and vision, whe r e signals p ossess smo o th pro p erties. In those tasks, instead of perfo rming the for ward-backward scheme for any fr ame, on e can p roper ly spr ead the weight up date acco rding to a diffusion scheme . While this is q uite an obviou s remark on p arallel computatio n, the disclosure of the degener ate d iffusion scheme behind Backprop , sheds light on its biological plausibility . The learning pr ocess th a t emerges in th is f ramework is based on co m plex diffusion wa ves that, howe ver , is dramatically simp lified un der the feedfo rward assumption, whe r e the propaga tio n is split into forward and bac k ward waves. 2 Backpr o p diffusion In th is section we consider m u ltilayered networks com posed o f L layers o f n eurons, but the results can easily be extend ed to any feedforward network characterized by an acyclic path of in terconn ec- tions. The layers ar e denoted by the index l , which ranges from l = 0 (input layer) to l = L (output layer). Let W l be the layer matrix and x t,l be the vector of th e neu r al output at layer l corr espondin g to discrete time t . Here we assume that the n etwork c a rries out a compu tation over time, so as, instead of regardin g the forward and backward steps as instantaneo u s proc e sses, we assume that the neuron al outp uts f ollow the time-d elay model: x t +1 ,l +1 = σ ( W l x t,l ) , (1) where σ ( · ) is th e neura l non -linear func tio n. In d oing so, when focussing on frame t the follo wing forward process takes place in a deep network o f L layers: x t +1 , 1 = σ ( W 0 x t, 0 ) x t +2 , 2 = σ ( W 1 x t +1 , 1 ) = σ ( W 1 σ ( W 0 x t, 0 )) . . . x t + L,L = σ ( W L − 1 x t,L − 1 ) = . . . = σ ( W L − 1 σ ( W L − 2 . . . σ ( W 0 x t, 0 ) . . . )) . (2) Hence, the input x t, 0 is fo rwarded to lay ers 1 , 2 , . . . , L a time t + 1 , t + 2 , . . . , t + L , respec tiv ely , which can b e regard ed as a forward wa ve. W e can formally state that in put u t := x t, 0 is fo rwarded to layer κ by the operator κ → , that is κ → u t = x t + κ,κ . Likewise, when inspired by the backward step 2 (A) (B) t t + 1 t + 2 t + 3 t + 4 t + 5 t + 6 t + 7 t + 8 Figure 2: Forward and backward w av es on a ten-le vel network with slowly varying input and sup ervision. In (A) it is sho wn how t he i nput and backward signals fill the neurons; the wave fronts of the wav es are clearly vis- ible. Figure (B) instead sho ws the same dif fusion process in stationary conditions when the neurons are already filled up. In t his quasi-stationary condition the Backpropagation dif fusion algorithm very well approximates the gradient computation. In particular for l s = ( L + 1) / 2 = (9 + 1) / 2 = 5 there is a perfect backprop synchronization and the gradient is correctly computed. of Backpropa g ation, we can think of back-prop agating the delta error δ t,L on the output as follows: δ t +1 ,L − 1 = σ ′ L − 1 W T L − 1 δ t,L δ t +2 ,L − 2 = σ ′ L − 2 W T L − 2 δ t +1 ,L − 1 = ( σ ′ L − 2 W T L − 2 ) · ( σ ′ L − 1 W T L − 1 ) · δ t,L . . . δ t + L − 1 , 1 = σ ′ 1 W T 1 δ t + L − 2 , 2 = L − 1 Y κ =1 σ ′ κ W T κ · δ t,L Like for x t,l , we can fo rmally state that the output delta error δ t,L is propag ated back by the ope r- ator L − κ ← − d efined by δ t,L κ ← − := δ t + κ,L − κ . The following equ ation is still f ormally coming from Backprop agation, since it represen ts the classic factorization of forward an d ba c kward terms: g t,l = δ t,l · x t,l − 1 = l − 1 − → u t − l +1 · δ t − L + l,L L − l ← − (3) Clearly , g t,l is the result of a diffusion process that is characterized by the interaction of a for ward and of a backward wav e (see Fig. 1). Th is is a truly local spatiotemporal p rocess which is d efinitely biologically plausible. Notice th a t if L is odd the n for l s = ( L + 1) / 2 we hav e a perfect backp rop synchro n ization between th e inpu t and the sup ervision, since in this ca se the numb er of forward steps l − 1 eq uals the number of backward steps L − l . Clearly , the forward- backward wa ve synch r onization 3 t t + 1 t + 2 t + 3 t + 4 t + 5 t + 6 t + 7 t + 8 Figure 3: Forward and b a ckward wa ves on a ten- lev el network with r apidly ch anging sign al. In this case the Backp ropag ation diffusion equation does not properly appro ximate the gradient. How- ev er , also in this case, fo r l s = 5 we have per fect Backpr opagatio n synchronizatio n with correc t syncron iz a tion of the grad ient. Learning Mechanics Remarks ( W, x ) u W eights and neuronal outputs are interpreted as generalized coordi- nates. ( ˙ W , ˙ x ) ˙ u W eight variations and neuronal variations are interpreted as gener- alized velocities. A ( x, W ) S ( u ) The cog nitiv e action is the dual of the action in mechanics. T ab le 1: L in ks between learning theory and classical m echanics. takes place for L = 1 , which is a trivial case in which ther e is n o wa ve prop agation. The n ext case of per f ect synchr onization is fo r L = 3 . In this case, th e two hid den lay ers are in volved in one - step of f orward-bac kward p ropag ation. Notice tha t the per fect synchr onization com es with on e step delay in th e gradient com putation. In genera l, the comp u tation of the gradient in the lay er of perfect synch ronization is delayed of l s − 1 = ( L − 1) / 2 . For all other layer s, Eq. 3 tu r ns out to be a n ap prox imation of th e g radient computatio n, since the for ward and b ackward waves meet in layers of no perfect synch ronization . W e c a n pr omptly see that, as a matter of f act, synchro nization approx imatively holds when ev er u t is not too fast with respect to L (see Fig. 2 and 3). The maximum mismatch b e tween l − 1 and L − l is in fact L − 1 , so as if ∆ t is the quantization in terval required to perfor m th e compu tation over a layer, g ood synch ronization requires that u t is nearly con stant over intervals of length τ s = ( L − 1)∆ t . For example, a video stream , which is sampled at f v frames/sec requires to carry o ut the computation with time in te r vals bound ed by ∆ t = τ s / ( L − 1) = f v / ( L − 1) . 3 Lagrangian interpr etatio n of diffusion on graphs In the remainder of the p aper we show that the forward/back ward d iffusion of layered networks is just a special case of mor e gener al diffusion p rocesses that are at the basis of learnin g in neural networks characterized by graphs with any patter n of interconnectio ns. In p a rticular we show that this natu rally arises when f ormulatin g learn in g as a p a r simoniou s con straint satisfaction pro blem. W e use recent con n ections established b etween learn ing pr ocesses and laws of phy sics under the principle of least cognitive a c tio n [1]. In this p aper we make the a dditional assumptio n of defining conn e ctionist models of 1 2 3 4 5 learning in terms of a set of co nstraints that turn out to be sub sidiary condition s of a variational pr oblem [7]. Let us co nsider the classic example of the feedforward network used to comp ute the XOR predicate. If we deno te with x i the o utputs of e a ch n euron and with w ij the weigh associated with the arch i − − − j , th en for the n eural n e twork in the fig u re we have x 3 = σ ( w 31 x 1 + w 32 x 2 ) , x 4 = 4 σ ( w 41 x 1 + w 42 x 2 ) and x 5 = σ ( w 53 x 3 + w 54 x 4 ) . Therefo re in the w − x space th is composition al relations b etween the nodes variables can be regard ed as co nstraints, namely G 3 = G 4 = G 5 = 0 , where: G 3 = x 3 − σ ( w 31 x 1 + w 32 x 2 ) , G 4 = x 4 − σ ( w 41 x 1 + w 42 x 2 ) , G 5 = x 5 − σ ( w 53 x 3 + w 54 x 4 ) . In addition to these constraints we ca n also regard the way with which we assign the inpu t values a s additional co nstraints. Suppose we want to compute the v alue of th e network on the input x 1 = e 1 and x 2 = e 2 , wh ere e 1 and e 2 are two scalar values; this two assignments can be regarded as two additional con straints G 1 = G 2 = 0 where G 1 = x 1 − e 1 , G 2 = x 2 − e 2 . First of all let us describe the architecture of the models that we will address. Giv en a simple digraph D = ( V , A ) of order ν , without loss of gener ality , we can assume V = { 1 , 2 , . . . , ν } and A ⊂ V × V . A neur a l network co nstructed o n D co n sists of a set of maps i ∈ V 7→ x i ∈ R and ( i, j ) ∈ A 7→ w ij ∈ R together with ν co nstraints G j ( x, W ) = 0 j = 1 , 2 , . . . ν wher e ( W ) ij = w ij . L et M ν ( R ) be the set of all ν × ν real matr ices and M ↓ ν ( R ) th e set of all ν × ν strictly lower triangular m atrices over R . If W ∈ M ↓ ν ( R ) we say that the NN has a feed forward structur e. In this pap er w e will consider b oth feedfor ward NN and NN with cycles. The r elations G j = 0 for j = 1 , . . . , ν spec if y the co mputation al sch e m e with wh ich the inf ormation d iffuses tr ough the n etwork. In a typical network with ω inpu ts these constrain ts are defined as f o llows: For any vector ξ ∈ R ν , fo r any matrix M ∈ M ν ( R ) with entries m ij and for any giv en C 1 map e : (0 , + ∞ ) → R ω we defin e the constraint on neuron j when the example e ( τ ) is pre sented to the network as G j ( τ , ξ , M ) := ξ j − e j ( τ ) , if 1 ≤ j ≤ ω ; ξ j − σ ( m j k ξ k ) if ω < j ≤ ν , (4) where σ : R → R is of class C 2 ( R ) . Notice that the dependence of th e constraints on τ reflects the fact th at the computatio ns of a neur al n etwork should b e based on external inputs. Principle of Least Cognitive Action Like in the case o f classical mechan ics, when dealing with learning p rocesses, we are interested in the tempo ral dyn a mics of the variables exposed to the data from which the learnin g is sup posed to happen . Depending on the structure of the matrix M , it is u seful to distingu ish between feedfor ward n etworks and n etworks with loops (recur rent neural networks). Let us therefor e consid e r the function al A ( x, W ) := Z 1 2 ( m x | ˙ x ( t ) | 2 + m W | ˙ W ( t ) | 2 ) ( t ) dt + F ( x, W ) , (5) with F ( x, W ) := R F ( t, x, ˙ x, ¨ x, W, ˙ W , ¨ W ) dt and t 7→ ( t ) a p ositiv e co n tinuou sly differentiable function , subject to the constrain ts G j ( t, x ( t ) , W ( t )) = 0 , 1 ≤ j ≤ ν, (6) where the map G ( · , · , · ) is taken as in Eq. (4). Let ( G ξ G M ) be th e Jacobian matrix of the constrain ts G with respect to x and W , where it is inten d ed th at the first ν rows contain the gradien ts of G with respect to its second argument: G ξ G M ij ≡ G j ξ i , for 1 ≤ i ≤ ν . V ariational pro blems with subsidiar y con ditions can be tackled u sin g the method of Lagran g e multi- pliers to convert the constrained pr o blem in to an unconstrain ed one [ 7]). In order to use this method it is necessary to verify an in depend ence hyp othesis between the co n straints; in this case we need to check that the matrix ( G ξ G M ) is full rank. Inter estingly , the follo wing pr o position holds true: Proposition 1. The ma trix ( G ξ G M ) ∈ M ( ν 2 + ν ) × ν ( R ) is full rank. Pr oo f. First of all notice that if ( G ξ ) ij = G j ξ i is full rank also ( G ξ G M ) has this property . Then, since G j ξ i ( τ , ξ , M ) = δ ij , if 1 ≤ j ≤ ω ; δ ij − σ ′ ( m j k ξ k ) m j i if ω < j ≤ ν , 5 we immediately notice that G i ξ i = 1 an d that for all i > j we have G i ξ i = 0 . This means that ( G j ξ i ( τ , ξ , M )) = 1 ∗ · · · ∗ 0 1 · · · ∗ . . . . . . . . . . . . 0 0 · · · 1 , which is clearly full rank. Notice tha t th is r esult heavily d epends on the assumption W ∈ M ↓ ν ( R ) ( triangula r matr ix ), wh ich correspo n ds to feedfo rward arch itectures. Derivation of the Lagrangian multipliers—feedforward networks F ollowing the spirit o f the principle of least cog nitive action [1], we begin by d eriving the constrained E u ler-Lagrange (EL) equations associated with the functional ( 5) unde r subsidiar y c ondition s (6) that refer to feedforward neural networks. The constrained function a l is A ∗ ( x, W ) = Z 1 2 ( m x | ˙ x ( t ) | 2 + m W | ˙ W ( t ) | 2 ) ( t ) − λ j ( t ) G j ( t, x ( t ) , W ( t )) dt + F ( x, W ) , (7) and its EL-equation s thus read − m x ( t ) ¨ x ( t ) − m x ˙ ( t ) ˙ x ( t ) − λ j ( t ) G j ξ ( x ( t ) , W ( t )) + L x F ( x ( t ) , W ( t )) = 0; (8) − m W ( t ) ¨ W ( t ) − m W ˙ ( t ) ˙ W ( t ) − λ j ( t ) G j M ( x ( t ) , W ( t )) + L W F ( x ( t ) , W ( t )) = 0 , (9) where L x F = F x − d ( F ˙ x ) /dt + d 2 ( F ¨ x ) /dt 2 , L W F = F W − d ( F ˙ W ) /dt + d 2 ( F ¨ W ) /dt 2 are the function al deriv ati ves of F with respect to x and W respectively (see [ 5]). An expression for the Lagra nge multipliers is deri ved by differentiating two times the equations of th e architectural co nstraints with respect to the time an d using the obtain ed expression to su b stitute the second ord er ter ms in the Euler equation s, so as we get: G i ξ a G j ξ a m x + G i m ab G j m ab m W λ j = G i τ τ + 2( G i τ ξ a ˙ x a + G i τ m ab ˙ w ab + G i ξ a m bc ˙ x a ˙ w bc ) + G i ξ a ξ b ˙ x a ˙ x b + G i m ab m cd ˙ w ab ˙ w cd − ˙ ( ˙ x a G i ξ a + ˙ w ab G i m ab ) + L x a F G i ξ a m x + L w ab F G i m ab m W , (10) where G i τ , G i τ τ , G i ξ a , G i ξ a ξ b , G i m ab and G i m ab m cd are the gradients and the hessians of con straint (6). Suppose n ow th at we want to solve Eq. (8)–(9) w ith Cauchy in itial co nditions. Of course we must choose W (0) and x (0) such that g i (0) ≡ 0 , where we posed g i ( t ) := G i ( t, x ( t ) , W ( t )) , fo r i = 1 , . . . , ν . Howev er since the constraint m u st h old also for all t ≥ 0 we must also have at least g ′ i (0) = 0 . T hese conditions written explicitly mean s G i τ (0 , x (0) , W (0)) + G i ξ a (0 , x (0) , W (0)) ˙ x a (0) + G i m ab (0 , x (0) , W (0)) ˙ w ab (0) = 0 . If the con straints does not depen d explicitly on time it is sufficient to to choose ˙ x (0) = 0 and ˙ W (0) = 0 , w h ile for time dependent constraint th is co ndition lea ves G i τ (0 , x (0) , W (0)) = 0 , which is an ad ditional con straint on the initial co ndition s x (0) and W (0) to be satisfied. Therefo re one possible consistent w ay to impose Cauchy conditions is G i (0 , x (0) , W (0)) = 0 , i = 1 , . . . , ν ; G i τ (0 , x (0) , W (0)) = 0 , i = 1 , . . . , ν ; ˙ x (0) = 0; ˙ W (0) = 0 . (11) 6 Reduction to Backpropagatio n T o unde r stand th e behaviour of the Eu ler equ ations (8) and (9) we observe that in the case of feedforward networks, as it is w e ll known, th e con straints G j ( t, x, W ) = 0 can be solved for x so that eventually we can express the v alue of the ou tput n euron s in terms of the value of the inp ut neurons. If we let f i W ( e ( t )) be the value of x ν − i when x 1 = e 1 ( t ) , . . . , x ω = e ω ( t ) , then the theory d e fined by ( 5) under sub sidiary cond itions (6) is equivalent, wh en m x = 0 and ( t ) = exp( ϑt ) , to the unco nstrained theo ry defined by Z e ϑt m W 2 | ˙ W | 2 − V ( t, W ( t )) dt (12) where V is a loss fu nction fo r which a po ssible ch oice is V ( t, W ( t )) := 1 2 P η i =1 ( y i ( t ) − f i W ( E ( t ))) 2 with y ( t ) an assigned target. The Euler equations associated with (1 2) are ¨ W ( t ) + ϑ ˙ W ( t ) = − 1 m W V W ( t, W ( t )) , (13) that in the limit ϑ → ∞ and ϑm → γ reduce s to the gra dient me th od ˙ W ( t ) = − 1 γ V W ( t, W ( t )) , (14) with learning rate 1 /γ . Notice that the pr esence of th e term ( t ) that we prop o sed in the gen- eral theor y it is e ssential in ord er to h av e a lea r ning b ehaviour as it respon sib le of the dissipative behaviour . T yp ically the term V W ( t, W ( t )) in Eq. (14) can be e v aluated using the Backp ropag ation algorithm; we will now show th at Eq. ( 8)–(10) in the lim it m x → 0 , m W → 0 , m x /m W → 0 repr o duces Eq. (14) where the term V W ( t, W ( t )) explicitly assumes the form prescribed by BP . In order to see this choose ϑ = γ /m W , ( t ) = exp( ϑt ) , F ( t, x ( t ) , ˙ x ( t ) , ¨ x ( t ) , W ( t ) , ˙ W ( t ) , ¨ W ( t )) = − e ϑt V ( t, x ( t )) , and multiply b oth sides of Eq. ( 8)–(10) by exp( − ϑt ) ; then take the limit m x → 0 , m W → 0 , m x /m W → 0 . In this limit Eq. (9) and Eq. (10) becomes re sp ectiv ely ˙ W ij = − 1 γ σ ′ ( w ik x k ) δ i x j ; (15) G i ξ a G j ξ a δ j = − V x a G i ξ a , (16) where δ j is the limit of exp( − ϑt ) λ j . Because the matrix G i ξ a is in vertible Eq. (16) yields T δ = − V x , (17) where T ij := G j ξ i . T his matrix is an upper triangular matr ix thus showing e xplicitly th e backward structure of the p ropag a tion of the delta error of the Backp ropag ation alg orithm. In deed in Eq. (15) the Lagrange multiplier δ plays the ro le of the delta er ror . In order to better u n derstand the perfec t red uction of our app r oach to the backpro p alg orithm con- sider the following example. W e simp ly con sider a feedf orward network with an input, an output and an hidden neuron. In this case the matrix T is T = 1 − σ ′ ( w 21 x 1 ) w 21 0 0 1 − σ ′ ( w 32 x 2 ) w 32 0 0 1 . Then acco r ding to Eq. (17) the L a grange multip liers are derived as f ollows δ 3 = − V x 3 , δ 2 = σ ′ ( w 32 x 2 ) w 32 δ 3 , and δ 1 = σ ′ ( w 21 x 1 ) w 21 δ 2 . This is exactly the Backpro pagation form ulas for the delta e rror . Notice th at in th is theory we also ha ve an e xpression for th e multipliers of the inpu t neuron s, even tho ugh, in th is case, they ar e not used to u pdate the weights (see Eq. (1 5)). Diffusion on cyclic g raphs The co nstraint-based analysis car ried out so far assumes holo nomic constraints, whereas th e claim of this pap er is that we canno t neglect temporal dependencies, which leads to expressing neural models by non -holon omic constrain ts. In doin g so, we go beyond the constraints expressed by Eq. (6) wh ich imply a n infinite velocity of diffusion o f information. Since 7 we are stressing the imp o rtance of time in learning processes, it is natur al to assume th a t the velocity of inform a tion diffusion throug h a network is finite. In the discrete setting of com putation this is reflected by the mo del 1 d iscussed in Section 2. A simple classic tran slation of this constrain t in continuo us time is c − 1 ˙ x i ( t ) = − x i ( t ) + σ ( w ik ( t ) x k ( t )) , (18) where c > 0 can b e inter preted as a “diffusion sp e ed”. In station ary situation inde e d Eq. (1 8) coincide with the usua l neur on equation in Eq. (6). Howe ver , we are in fro n t of a muc h mo re complicated co nstraint, since not only it inv olves th e variables x and w , but also th e ir d eriv ati ves. Such con straints are called non -holo nomic co n straints. Now we snow show ho w to determine the stationarity conditions of the functional 1 A ( x, W ) = Z m x 2 | ˙ x ( t ) | 2 + m W 2 | ˙ W ( t ) | 2 + F ( t, x, W ) ( t ) dt under the nonholo mic constraints G i ( t, x ( t ) , W ( t ) , ˙ x ( t )) := c − 1 ˙ x i ( t ) + x i ( t ) − σ ( w ik ( t ) x k ( t )) = 0 , i = 1 , . . . , r, (19) by making use of the rule of the Lagrange m u ltipliers. As usual we co n sider the stationary points of the functional A ∗ ( x, W ) = Z m x 2 | ˙ x ( t ) | 2 + m W 2 | ˙ W ( t ) | 2 + F ( t, x, W ) ( t ) dt − Z λ j ( t ) G j ( t, x ( t ) , W ( t ) , ˙ x ( t )) dt. The Euler equations for A ∗ are c − 1 ˙ x i ( t ) + x i ( t ) − σ ( w ik ( t ) x k ( t )) = 0; − m W ( t ) ¨ W ( t ) − m W ˙ ˙ W ( t ) − λ j G j M ( t, x ( t ) , W ( t ) , ˙ x ( t )) + ( t ) F W ( t, x ( t ) , W ( t )) = 0; − m x ( t ) ¨ x ( t ) − m x ˙ ˙ x ( t ) + ˙ λ j G j p ( t, x ( t ) , W ( t ) , ˙ x ( t )) + λ j d dt G j p ( t, x ( t ) , W ( t ) , ˙ x ( t )) − λ j G j ξ ( t, x ( t ) , W ( t ) , ˙ x ( t )) + ( t ) F x ( t, x ( t ) , W ( t )) = 0 . Again, if we assume that F ( t, x, W ) = − V ( t, x ) , ( t ) = e ϑt , δ j = e − ϑt λ j and w e explicitly use the expression f or G j p we get c − 1 ˙ x i ( t ) + x i ( t ) − σ ( w ik ( t ) x k ( t )) = 0; − m W ¨ W ( t ) − m W ϑ ˙ W ( t ) − δ j G j M ( t, x ( t ) , W ( t ) , ˙ x ( t )) = 0; − m x ¨ x ( t ) − m x ϑ ˙ x ( t ) + c − 1 ˙ δ − δ j G j ξ ( t, x ( t ) , W ( t ) , ˙ x ( t )) − V ξ ( t, x ( t )) = 0 . This systems of equ ations can be better interpreted in the limit in which we recovered the backprop rule in Section 4; that is to say in th e limit m x → 0 , m x → 0 and m x /m W → 0 , θ → ∞ and θm W = γ fixed. Under this condition s, we have the following fu rther reduction c − 1 ˙ x i ( t ) + x i ( t ) − σ ( w ik ( t ) x k ( t )) = 0; ˙ W ( t ) = − 1 γ δ j ( t ) G j M ( t, x ( t ) , W ( t ) , ˙ x ( t )); c − 1 ˙ δ ( t ) = δ j ( t ) G j ξ ( t, x ( t ) , W ( t ) , ˙ x ( t )) + V ξ ( t, x ( t )) . (20) The equation that defines the Lagr a n ge multipliers δ is now a differential equa tio n that explicitly giv es us the c o rrect updatin g rule in stead of a instantaneous equation that must be solved for each t . As the dif fusion speed becom es infinite ( c → + ∞ ) Eq. (20) reprodu ce Backpro pagation , which is consistent with the intuiti ve explan ation tha t arises from Fig. 1, 2, 3. 1 Notice that here we are ov erloading the symbol F since in this section we assume that the L agrangian F depends only on t , x and W . 8 4 Conclusions In this paper we h ave shown that th e lo ngstandin g debate on the biological plau sib ility of Backp rop- agation can simply be add ressed by d istinguishing the for ward - backward local diffusion p rocess for weight up dating with re spect to the alg orithmic gradien t compu tation over all the n et, which requires the tr ansport o f the delta error throu gh the entire g r aph. Basically , the algorithm expresses the degeneratio n of a biolo gically plausible diffusion pro cess, which comes from the assumption of a static neur al model. The main conc lusion is that, more than Backpro pation, the appropr iate target of the mentioned lo ngstandin g biological plausibility issues is the assumptio n of an instantan eous map from the input to the output. The forward-b ackward w av e propag ation behind Backprop aga- tion, which is in fact at the basis o f the co rrespon ding algo rithm, is p r oven to be lo cal and d efinitely biologically p lausible. This paper has sh own tha t an opp ortun e em beddin g in time of deep networks leads to a natur al in ter pretation of Backprop as a diffusion p rocess which is fully local in space and time. The giv en analysis on any graph-based neur al architectu res sugg ests that spatiotemp oral diffu- sion takes place according to the interactions of forward and backward waves, which arise fro m the en vironmen tal interaction. While th e f orward wa ve is gener ated by the inp ut, the b ackward wave arises from th e output; the special way in which they interact for classic feedforward network corre- sponds to the degeneration of this dif fusion process which takes place at infinite velocity . Howe ver , apart from this theoretical limit, Back propa gation diffusion is a tru ly local process. Br oader Impact Our work is a foundatio nal study . W e b eliev e that there are neither ethical aspects no r futu re societal consequen ces that should be discussed. Refer ences [1] Alessandro Betti and Marco Gori. T he principle of least cognitiv e action. Theor . Comput. Sci. , 633:83 –99, 20 16. [2] Alessandro Betti a nd Marc o Gori. Conv o lutional n etworks in visual environments. CoRR , abs/1801 .0711 0, 20 18. [3] Alessandro Betti, Mar c o Gori, and Stefano Melacci. Cognitive action laws: T h e case of visual features. IEEE transactions on neural networks and learning systems , 2019. [4] Alessandro Betti, M arco Gori, and Stefano Melacci. Motion inv ariance in visual environments. In Pr oceeding s of the T wenty-Eighth I nternation al Joint Conference on Artificial Intelligence, IJCAI-19 , pages 20 09–20 15. Internatio nal Joint Con ference s on Artificial Intelligence Organi- zation, 7 2019. [5] R Couran t and D Hilbert. Meth ods of Mathematical Physics , volume 1, pag e 190. Interscience Publ., Ne w Y or k and London, 19 62. [6] Francis Crick. The recent excitement abo ut neural networks. Nature , 33 7:129 –132 , 1 989. [7] M. Giaquinta and S. Hildebrand. Calcu lus of V ariation s I , volume 1. Spring er, 1 996. [8] Ian Goodfellow , Y oshua Bengio, and Aa r on Courville. Deep Learning . Th e MIT Press, 2016. [9] Marco Gori. Machine Learning: A Constrained-Based Ap pr o ach . Morgan Kauffman, 2018 . [10] Matthias L ier o and Ulisse Stefanelli. A new min imum princip le for lag rangian mec h anics. Journal of Nonlinea r Science , 2 3:179 – 204, 201 3 . [11] T .P . Lillicrap , D. Cownden, D.B. T wed, and C.J. Akerm a n. Random synap tic f e e dback weights support error backpro p agation for deep learning. Natur e Communications , Jan 2 016. [12] Benjamin Scellier and Y oshua Beng io. Equivalence of equilibrium pro pagation and rec u rrent backpr o pagation . Neural Computation , 31(2), 2 019. 9
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment