Luenberger-Type Cubic Observers for State Estimation of Linear Systems
This paper introduces a new nonlinear observer for state estimation of linear time invariant systems. The proposed observer contains a (nonlinear) cubic term in its error dynamics. "For the final version of this article, please refer to the publish…
Authors: Mohammad Mahdi Share Pas
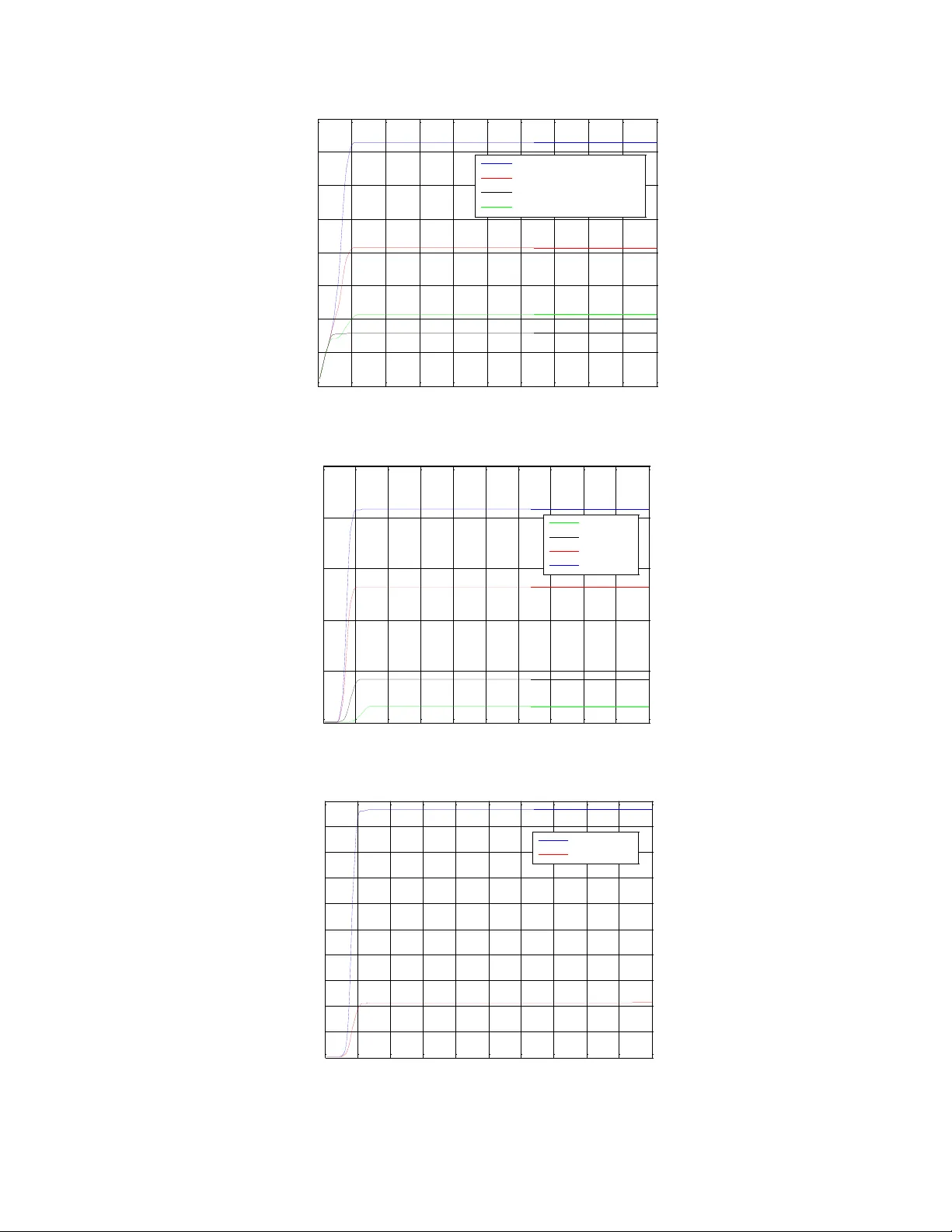
Luenberger-Ty pe Cubic Observers f or State Estim ation of Linear System s Mohamm ad Mahdi Share Pasand 1 1 Department of Electrical Engineering, Faculty of Technology and Engineering, Standard Research Institute, Alborz, Iran, PO Box 31585-163,Email: sharepasand@standard.ac.ir Abstract. This paper introduces a new nonlinear observer for state estim ation of linear time invariant systems. The prop osed obse rver contains a (nonlinear) cubic term in its error dynamics. The cu bic observer can yield improv ed per formance while poss essing desired robustne ss properties. Unlike pr eviously proposed observers, estim at ion error dynamics of the cubic observer are nonlinear. Convergence criteria , robustness properties and observer based feedback control with cubic observers are addressed. Simulation examples are included as well which show significant performance improvement compared to linear observers. Keywords. State estimation, Observer, Ro bust observer, Cubic observ er. 1. Introduction Since their i ntroduction, observers have been extensively studied and used in the l iterature for both l inear and non li near dynam i cal s ystems [1 -3]. In practice, not all state variab les can be directly measured by sensors. A s a result, in many appl ications requiring the whole sta t e v ar iable vector, i t is inevitable to use an observer to c onstruct th e state variable from the measured outp ut [1]. Observ er s may be us ed for obse rver- based feedb ac k contr ol [4-8], fault detection [9-14] and parameter estimation [1]. Unknown or partially known i nput [3, 10] , robust [7, 15] , optim al [2, 15 ] and functional [16 ] observers h ave been inves tigated in the literature for linear [16] as well as descriptor [3, 16], delayed [9], time varying [2] , linear parameter varying [13, 14] and nonl i near systems [1, 4-8, 11, 12]. The literature of robust and optimal linear observers for linear systems is very mature [15] . Nonlinear state estimation including sl iding mode and high gain observers have receiv ed research attention as well [7 , 11]. A significant l y different approach to observer design has been mentioned in [17] where the state trajectory of the so-called interval observer, does not need to conv er ge to the plant state, but i s desired to be in a pr e-defined vicinity of it . Not only linear ordinary observers, but also delayed [18], switching [19], descriptor [10] and nonlinear [ 1] obs ervers have been practiced in the literature. Finite time [21], perfect [22] and proportional, integral, derivative [23-25] observers have be en introduced as well to enhance pe rformance of linear obse rvers in different manners. Though the observ er model has becom e m ore and more complicated to imitate complicated plant dynamics, it is comm on to keep the estimation error dynamics linear (or delayed linear [16] ) to facilitate stability analysis. As a result, less attention has been given t o nonlinear estimation error dynam ics. I n addi tion, to the best of the author’s knowledge , use of nonlinear observers for linear systems has not been considered yet. This paper suggests a nonlinear observer, namely the cubic observer, as a generalization to linear observers, in order to improve the observer performance while m aintaining desired robustness properties. The proposed cub i c observer s t ructure resem bles the structure of Luenberger obse r vers. The motivat ion of introducing the cubic observer is to achieve a fast response with smaller error norm. Achieving f ast observer responses has been the aim of several researches [26-33 ] and is essential to observer based feedback control [4], finite time [21] and time-optimal [34] observ ers as well as fault detection observers [2, 3, 10] . Compared to a similar linear observer, t he cubic observer yields a faster response in the beginning of the observation course and a fa ster desc ending Ly apunov f unction when error norm s are equa l . T he cubi c term can be made arbitrarily small or set to zero, to transform t he cubic observer to a li near one. Therefore, a cubic observer i s rather a generalization than an alternative to the linear observers. The cubic observer requires generic existence conditions and has a simple design m ethod. Unk nown and parti ally known input [3], proport ional-integral- derivative [23-25] and optimal cubic observers ar e among future possible work s. Th is paper is or ganized in four sections. In the second section, main results are given. I n section 2.1., the cubic observer is introdu ced and its global stability conditions are dis cussed. In addition, we show that the cubic observer has performance advantages over a similar linear observer. In section 2.2., it i s shown that cubic observers possess some robustness properties. Section 2.3., pr ovides conditions under which the cubic observer can be deployed in combination with linear state f eedback for reg ulation and control. It is shown that com par ed to linear observers, no additional r equirem ent is needed f or obs er ver based feedback control with cubic observ ers. The third section provides exam ples. The fourth section con cl udes the paper. 2. Luenberger-T y pe Cubic Observ ers 2.1. Convergence C riteria and Performance Advant ages Assume a linear time inv ariant system described by st ate space equa t ions (1). (1) Vector repr esents the state variable, is the measured output and matric es and are the state , input and output matrices respectively. Vector is a known (measured) exog enous input. It is assum ed throughout t he paper that the pair is observabl e. In order to estimate the state of system (1) f rom the m easured output, it is com mon to use a linear observer (2). (2) In (2), represents the estimated state. Matrix is the observer gain. Subscript l is used to emphasis that obse rver (2) i s a linear dynam i cal system. The estim at ion error is def i ned as: (3) This error is gov erned by the following dy namical equations: (4) Now assume a cub i c observ er of the form (5). (5) In which is the estim at ed state vector for the cubic observer which is aim ed to conv erge to the state vec t or of (1). Matrice s , and are the observer para meter matrices and the estimat i on error is defined as follows: (6) The estimation e r ror dynamics are: (7) Observer s tructure (5 ) differs fr om most of previously pr oposed obs er vers [1, 6 -8] in the sense that it leads to nonlinear estimation error dynamics (7) . When t he estimation error shrinks as the cubic term in (7) vanishes faster than the linear term. Therefore, t he cubic observer (5) has a behav i or close to a linea r observer (2) in the vicinity of the origin . As evident from ( 4) and ( 7 ), the presence of the exogenous input does not affect t he estimation error dynamics of linear or cubic observers. Therefore, dropping the exog enous input from (1) does not a ffect the results exc ept for tha t of section 2.3. Remark 1. Matrix determ i nes t he relative importance of each output. If , each will represent an importance index for the out put. Another approach is t o determine bas ed on the role of each output on the estimation co st after a l inear observ er is deployed for state es timation . For this p urpose, we may first dep loy a linea r observer and th en determ i ne based on the observer re spons e. Defining the Lyapunov funct ion candidate , in which is to be determined, a stability criterion is deriv ed as (8). (8) We choose such that is Hurwitz, satisfying the Ly apunov equation (9). (9) It can be sh own that for any , there exists a unique solution t o (9) i f the pair is observable [35]. If (9) holds, (8) will be fu l filled if: (10) I f and , (10) will be f ulfilled. Theor em 1 summ ari zes the above discussi on. Theorem 1. If the positive definite symmetric matrix and satisfy (11) -(13), t he estimation error dy namics of observer (5) for system (1) will be globally stable. (11) (12) (13) Matrices and are to be chosen t o fulfill (11)-(13). Proof: condition (11) guarante es that t he origin is the only equilibrium for (7), whil e (12)-(13) guarante e that the Lyapunov f unction derivative giv en i n (8)-(10) is negativ e . The proof is co mple te . ■ Lemma 1. Assume a non-symmetric, real valued, square matrix . If t he matrix is negative definit e, then is also negative def i nite in the sense that it fulfills: Proof: Due to assum ption , we have: Since the two terms in the l eft hand side of t he inequality are scalars an d transposes of each oth er , they are equal. Therefore ; This com pletes the proof. ■ Remark 2. Theorem 1 can be alternatively established with Lyapun ov function an d the Zubov’s equat i on [34], for which a conv er gence reg ion i s derived as: . Theorem 2. For a given , a s olution to (11) and (13) is giv en by (14). (Scala r is arbitrary.) (14) Proof: The proof follows by defi ning the Lyapunov candidate function . Due to observability assumption for t he pair one can choose t o mak e st able. By assigning (14), condition (11) will be fulf illed. To show this, assume that there exists a non-zero equilibriu m for (7). i.e.: (15) The scalar i s non-z ero. To show this, notice that if this scalar is zero, then (15) requires t hat with a nonzero . This is not possibl e since is assumed to be stable and thus of f ull rank, having an inverse matrix. Multiplying both sides of (15) by , ( 16 ) will be obtained. (16) Left multiply t he both parts of this equation by the v ector to obtain: (17) Dividing by t he non-zero scala r , it is resulted that : This equation can ’ t be fulfil l ed if the matr ix is positive semi-defin ite i.e. if: Substi tu ting (14): Note that: (18) Since i s chos en to stabilize , i t is guaranteed that: . Therefore, according t o Lem ma 1 , matrix is negative d efinite. This com plet es the proof. ■ Scalar can be used for optimization while stability of observer is assured via Theorem 2 . In the remainder of this se ction, we provide comparisons bet ween the cubic and li near o bservers. Theorem 3. Denote the Lyapunov functions of t he linear and cubic estimation error dynamics (4) and (7) by and respec tively. I f (11)-(13) are fulfilled for observer ( 5), and , then (19) holds. (19) Proof. Write the Ly apunov derivative as (8). I f (13) holds; Also note that; The proof com plet es here. ■ Theorem 3 alongside with equation (8), states an advantage of the cubic observer. When the estimation error norm is larger for the cubi c obs er ver, its Ly apunov function will de sc end f aster than a linear observer as can be seen from (8). Furthermore, when the two observers have estimation e rr ors with equal norms, the cubic observer has a faster response. T he following Remark states another advantage of the cub i c o bserver. Remark 3. If (11)-(13) are fulfilled for observer (5) , and , then based on (10), we have . The larger the i nitial estimation error i s, the larger-negative is the cubic term (10). T herefore, the e stimated st ate of cubic observer takes a much larger s t ep towards the ac t ual state, if the initial dis crepancy is l arger. 2.2. Robustness Prope rties In this section, robustness p roperties of cubic observ ers are addressed. Co nsider the uncer t ain system (20 ) . (20) Assume that fulfills the quadratic stab ilizability prope rty (21). (21) Theorem 4. A ssume fulfills (11) and (21) for all uncertainties captured by . The cu bi c observer (5) yields robust ly stable es timation error dy namics for all uncertainties captured by if (13 ) holds. Proof: According to assum pt ion (11), the estim ation error dynam i cs possess only one equilibrium point at the origin. Define t he Lyapunov function candidate . Take derivativ es to obtain: The term is negative due to ( 21). The term is negative due to (13). The proo f is com pl ete. ■ Note t hat i ntroduced in the pr oof of Theorem 4, is not affected by uncertainty and therefore provides a confidence m argin for the cubic o bserver convergence w hen t he estim ation error of (20 ) is large. Condition (21) m ay not be alway s satisfied. The fo l lowing t heorem st ates an alternativ e robustness property. This theor em also holds for linear obse r vers as can be seen f rom the proo f . Theorem 5. Assum e the linear uncertain sy st em described by (20) fulfills (22) . (22) In which is a scalar real valued perturbation with and . 1 The estimation error dynamics of the cubic obse rver are robust ly stable if (23) hol ds. (Matrices are given in (9)). (23) Proof: The proof follows by finding upper limits for the cub ic obse rver estimation error dynam i cs w ith the perturbation . The Lyapunov function de ri vative fu l fills: The first term in the right hand s i de is upper-bounded by: In which represents the minimum eigenvalue of a matrix. Note that matrix is assum ed symmetric positive definite. T herefore, al l of its eig envalues are real -valued posi t ive. The second te rm fulfills: In which denotes the maxi mum eigenvalue of a matrix. Again, due t o t he fact that is positive definite symm etri c, all of it s e igenvalues a r e real-valued positiv e. Using the abov e i nequality we ob tain: In order for the Ly apunov derivative to be neg ative, it is sufficient that: This com pletes the proof. ■ 2.3. Observer-based Feedback Control To proceed to the next theorem, a ssume the estimated s t ate is fed to t he inpu t via a state f eedback gain as in (24). (24) 1 Assuming and does not compromise generality of the result. If both bounds are positive, we can replace by with , and by . S imilar arguments hold if both bounds are negative. Theorem 6 . Assum e that matrices and satisfy (11)-(13). T he closed loop control system governed by (1), (5) and (24) is stable if the positive definite symmetric matrices fulfill (25 ). (25) Proof: Form the clo se d loop system dynamics by combining (1), (5) and (24 ). Defining the Lyapunov candidate function and t ak ing derivativ e s we obtain: In w hich is given in (25). Note that stability of and is necessary for (25). ■ Corollary 1. T he closed loop control sy stem described by ( 1), ( 5) and ( 24 ) ( i.e. linear feedback with a cubi c observer) i s st able if the closed loop contro l system described by (1 ), (2) and ( 24) ( i .e. linea r feedb ac k w i th linear observ er) is stable. Proof: Rewrite le ft hand side of (25) as : In w hich : Dynamics of the closed loop system with linear feedback and li near observer can be written as . Note that if and only if . T he left side of (25) is the Lyapunov funct ion derivativ e for (1) with observer (2 ) and state feedb ack (24). The proof is comple t e. ■ 3. Simulation ex amples Example 1. In this example, we study the cubic observ er perform ance for an integrator system with the following state spa ce matri ces. The plant is observ abl e. I t i s desired to estim ate the second state from the mea sured output. Locating the linear observer poles at and using the pole placem ent technique, the linear observer gain is obtained as . Assuming , the solutio n to the Ly apunov equation (12) is der ived as: The cubic observ er parameters are as follows: Fig.1 shows the estimated and actual values for the second state with the linear and cubic observers in the first four seconds of the simulation course. The cubic observer provides a faster approach towards t he actual state. Fi g.2 depicts the Lyapunov functions in the first instants of the estimation for t he two observer es t imation errors introduced in (19). The faster decen t of the cubic observ er Lyapunov function is evident. Fig.3 shows the two Lyapunov functions is a longer time window. It can be seen that when the estimation error is l arger (due to initial conditions), the Lyapunov function for t he cubic observer esti mation error descends to l arge negative m uch faster. The decent rate approaches to z er o eventually. Figure 1. Estimated state with cubic and linear observers Figure 2. Lyapunov functions for estimation errors; the first 10 m illi seconds of simulation 0 0.5 1 1.5 2 2.5 3 3.5 4 -4 . 5 -4 -3 . 5 -3 -2 . 5 -2 -1 . 5 -1 -0 . 5 0 0.5 tim e (sec ) x 2 (t) x 2 (t), ac t ual x 2 (t), es t imated; linear observ er x 2 (t), es t imated; c ubic observ er 0 0.001 0.002 0.003 0.004 0.005 0.006 0.007 0.008 0.009 0. 01 0 2 4 6 8 10 12 14 16 18 20 tim e (sec ) V c (t), V l (t) V l (t); l inea r obser v er V c (t), c ubic observ er According to Fi g. 4 the cubic observer yields a small er pe ak (0.48 compared to 1.18) and smaller 5% settling time 2 (1.7 sec com par ed to 2.3 sec ) for the estimation error. Fig. 5 compares the estimation error for different values of the scala r . This scalar may be used a s a design param et er. Figure 3. Lyapunov functions for estimation error dynamics; the first second of simulation Figure 4. Estimation error response f o r the two observers 2 We define the settling time as the time during which the error shrin ks to less than .05 for the first time. 0 0.1 0.2 0.3 0.4 0 . 5 0.6 0.7 0.8 0.9 1 0 2 4 6 8 10 12 14 16 18 20 tim e (sec ) V c (t), V l (t) V l (t); l inea r obser v er V c (t), c ubic observ er 0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5 -3 . 5 -3 -2 . 5 -2 -1 . 5 -1 -0 . 5 0 0.5 1 1.5 tim e (sec ) e 2 (t) e 2 (t); l inea r obser v er e 2 (t); c ubic observ er Figure 5. Estimation error of the second state for differe n t values of Example 2. This example compares p erformance and robustness of a cubic o bserver with a linear one. Consider the fol lowing param eter matrices for a linear system : Locating observer po les at , the linear observer param et ers are derived using pole placement technique. A ssum ing , the solution to the Ly apunov equation is derived as well. The nonlinear gai n is then computed as: Fig. 6 shows the cumulative squared estim ation error for the third state variable for different values of the parameter gamma in (14) . The cubic observer with yields the best performance. The cumulative estimation error no rm shown in Fig. 6 i s defined as: In which May be replaced by in case of cubic observer and in case of linear observer. Fig. 7 shows the sum of squared estimation errors for all three state variables, computed for different values of parameter gamm a. T o evaluate the performances in presence of uncertainties, assume that the state matrix is in t he form of (22) . (i.e. ). Recalling Theorem 5, the upper bound for is derived as . Fig. 8 depicts the sum of squared estimation er rors for and . T h e performance advantag e persists for . T he upper bound .0014, given by Theorem 5 is very conservative for this case. Tightening of the bounds as well as more generic uncertainty structures require future research. 0 0.2 0.4 0 . 6 0.8 1 1.2 1.4 1 .6 1.8 2 -3 -2 . 5 -2 -1 . 5 -1 -0 . 5 0 0.5 1 tim e (sec ) e 2 (t) gamma=.1 gamma=.5 gamma=.9 gamma=1.3 gamma=1.7 gamma=2 Figure 6. Cumulative squared estima tion errors of , with different values for Figure 7. Sum of cumulative squared estimation errors , with different values for Figure 8. Sum of cumulative squared estimation errors , with , 0 20 40 60 80 100 120 140 160 180 200 0 5 10 15 20 25 30 35 40 tim e (sec ) cumm ulativ e s quar ed es tim ation err or linear observ e r, gamma=0 cubic obs er v er, gamma=. 01 cubic obs er v er, gamma=. 1 cubic obs er v er, gamma=1 0 20 40 60 80 100 120 140 160 180 200 0 0.5 1 1.5 2 2.5 x 10 4 tim e (sec ) sum of s quar ed est im ation err ors gamma=1 gamma=.1 gamma=.01 gamma=0 0 20 40 60 80 100 120 140 160 180 200 0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2 x 10 4 tim e (sec ) cumm ulativ e s quar ed es tim ation err or linear observ er cubic obs er v er Example 3. This example exam ines Theorem 6. Consi der the following sy st em an d observer param eters: Fig. 9 shows the conv entional quadrat i c cost with and . Since the feedback gains are the same, the control cost which is the ultim ate objective of an observer based control scheme, her e, r eflects the advantage of the cubic observ er over the l inear one. Figure 9. Regulation cost by linear observer and cubic observer with linear state feedback Conclusion In this paper, a new nonlinear observer with a cubic term i s introduced for improved st ate estimation of linear systems. I t is shown that cubic observers m ay be used to improv e obser ver performance. These observers c an also be read i ly use d for observer-based linear feedback control. The cubic observer i s shown to yield better performance in the sense of Lyapunov function decent rate for the estimation error dynam i cs. It is also shown that the cubic observer has robustness properties si milar to linear obse rvers. Examples are included to dem onstr ate cubic ob server performance in com pari son to linea r observ er s. References [1] Besanço n, Gildas. Nonlinea r observers and a pplications . Vol. 36 3.Berlin: springer, 20 07. [2 ] P asand, Mohammad Mahdi Share, and Mo hsen Montazeri. "Kalman filtering with optimally scheduled measurements in band width limited co mmunication media." ETRI Journal 39.1 (2017): 13- 20. [3] Share Pasand, Moha mm ad Mahdi, and Mohsen Mo ntazeri . " Observer d esign for d escriptor networked control systems with unknown and p artiall y known inputs." Jou rnal of Control and Decision (2018): 1- 17. [4] Jeon, W oongsun, Ali Z emouche, and Rajesh R aj amani. "Trac king of vehicle motion on hi ghways and u r ban roads using a nonlinear observer." IEEE/ASME Transaction s on Mechatronics (2 019). [5] Zou, An -Min, Anton HJ de Ruiter, and Krishna De v Kumar. "Disturbanc e ob server-based attit ude co ntrol for spacecraft with input MRS." IEEE Transactions on Aerospace and Electronic Systems 55 .1 (2019): 384 -396. [6] Nath, Anirudh, Rajeeb Dey, and Carlos Aguilar -Avelar. "Observer based nonlinear control d esign for glucose regulation in t ype 1 diabetic patients: An LMI approach." Biomedical Signal Processing and Control 47 (2019) : 7-15. 0 20 40 60 80 100 120 0 500 1000 1500 2000 2500 3000 3500 4000 tim e (sample) J c o n t r o l c o s t f o r l i n e a r a n d c u b i c o b s e r v e r s w i t h s t a t e f e e d b a c k linear observ e r cubic obs er v er [7] Khalil, Hassan K., and Laurent Pral y. "High gain observers in nonlinear feedback co ntrol." Internation al Journal of Robust and Nonlinear Con trol 24.6 (2014): 993-1015. [8] Xu, W ei, et al. "Improved nonlinear flux observer -based second-Order SOIFO for PMSM se nsor-less co ntrol." IEEE Transaction s on Power Electronics 34. 1 (2019): 565 - 579. [9 ] Pinto, Hardy LCP, Tiago Roux Oliveira, and Liu Hsu. " Fault reconstruction for delay systems via least squares and time shifted slidin g mode observers." Asian Journal of Control 2 1.1 (2019): 52 - 69. [10] Pasand, MM Share, an d H. D. T aghirad. "Descriptor approach to unk nown input P I observer design: Applicatio n to fault detection." Control Automa tion and Systems (ICCAS), International Conference on. IEEE , 2010. [11] Gao, Yab in, et al. "Fault deviation estimation and integral slidin g mode control design for Lipschitz nonlinear systems." S ystems & Control Letters 123 ( 2019): 8- 15. [12] Agarwal, Deepak, and Chandan Kumar Singh. " Model -Based fault detec tion o n mo dern auto motive e ngines." Advanced Eng ine Diagnostics . Sp ringer, Singapore, 20 19. 167 - 204. [ 13 ] Chen, L ej un, Christopher Ed wards, and Halim Alwi. "Sensor fault estimation using LPV sliding mode observers with erroneous scheduli ng parameters." Au tomatica 101 (2019): 66- 77. [ 14 ] Morato, Marce lo M., et al. "Fault analysis, detection a nd estimation for a m icr o- grid via H2/H∞ LPV o bser vers." Internationa l Journal of Electrica l Power & Energy System s 1 05 (2019): 8 23- 845. [ 15 ] Xie, Lihua, Dan Po pa, and Frank L. Le wis. Optimal a nd robu st estimation: with an introduction to stochastic control theo ry . CRC press, 2007. [16] Trinh, Hieu, and T yrone Fernando. Fun ctional observers for d ynamical systems . Vol. 4 20. Springer Science & Business Media, 201 1. [17] Ma zenc, Frédér ic, and Olivier B ernard. "Interval observers for linear time -invariant s ystems with disturbances." Automatica 47.1 (2011): 140 - 147. [18] Sundaram, Shreyas, and Christoforos N. Hadj icostis. "Delayed observers for linear systems with unknown inputs." IEE E Transactions on Automa tic Control 52.2 (2007): 3 34- 339. [19] Aless andri, Angelo, and Paolo Coletta. "Switching o bservers for continuous -time an d discrete -time linear systems." Proce edings of th e 2001 American Control Conferen ce . Vol. 3 . IEEE, 2001. [20] De La Sen, Manuel, and Ningsu Luo. "Design of linear observers f o r a class of linear hybrid s ystems." Internationa l Journal of Systems Scien ce 31.9 (2000): 1077 - 1090. [21] P erruquetti, W ilfrid, T hierry Floquet, and Emmanuel Moula y. " Finite -time observers: application to sec ure communication." IEEE Transaction s on Automatic Con trol 53.1 (2008): 356 -360. [22] Kac zorek, T. , and M. Sławiński. " Perfe ct observers o f standard linear syste ms." Bulletin of the Polish Academy of Sciences. Tech nical Sciences 5 0.3 (2002): 237 - 245. [23] Chang, Jeang-Lin. " Applying d iscrete -time pro portional integral observers for state an d distu r bance estimations." IEEE Transa ctions on Automatic Control 51 .5 (2006): 814 - 818. [24] Pasand, MM Share, M. A li yari Sh, and H. D. T aghirad. "Unknown input -pro portional integral o bserver for singular systems: Applicatio n to fault detectio n." 18 th Iranian Conference o n Electrical Engineer in g . IEEE, 2010. [25] Gao, Zhiwei, a nd Steven Ding. " Fault estimatio n and fa ult-tolerant control for descrip tor systems via p roportional, multiple-integral a nd derivative observer design." IET Control Theo ry & Applications 1.5 (2007): 1 208-121 8. [26] Zhan, Y. J., Ching Chuen Chan, an d K. T. Chau. "A novel sliding-mode observer for indirect position sensi ng of switched reluctance motor drives." IEEE Tran sactions on Industrial Electro nics 46.2 ( 1999): 390- 397. [27] Zhang, Ke, Bi n J iang, and Vincent Cocq uempot . "Adap tive o bserver -based fast fa ult estimation." Internation al Journal o f Control, Automation, a nd Systems 6.3 (2008): 320- 326. [28] Zhong, Ma iying, e t al. "Observer -based fast rate fault detection for a clas s of multirate sampled -data systems." IEEE Transa ctions on Automatic Control 52 .3 (2007): 520 - 525. [29] Nilsen, R., a nd M. P. Kazmierkowski. "Reduced -ord er observer with p arameter adaption for fast rotor flux estimation in induction m ac hines." IEE Proceedings D-Control Theory and Applications . Vol. 136. No. 1 . IET, 1 989. [30] Guo, L. Z., and Q. M. Zh u. " A fast convergent extende d Kalman ob server for nonlinear discrete -time syste ms." Internationa l Journal of Systems Scien ce 33.13 (2002): 1051 - 1058. [31] Kojabadi, H. Madadi, L. Ch a ng, an d R. Doraiswami. "A novel adap tive obser ver f o r very fast estimation of stator resistance in sensorless induction m otor drives." IEEE 34 th Annual Conference o n Power Electronics S pecialist, 2003. PESC'03. Vol. 3. IEEE, 2003. [32] Meghdari, A., D. Naderi, and M. R. Alam. "N eural-network -based observer for r eal-time tip-over esti mation." Mechatronics 1 5.8 (2005): 989 - 1004. [33] Vargas, A., et al. "Ob server -based time-opti mal co ntro l of an aerobic SBR for che mical a nd petrochemical wastewater treatment." Water scien ce and technolog y 42.5-6 (2000): 163 - 170. [34 ] Nikravesh, Seyed Ka maleddin Yadavar. Nonlinear syst ems stability analysis: Lyap unov -b ased app roach . CRC Press, 2016. [ 35 ] Khalil, Hassan K., and Jessy W. Grizzle. Nonlin ear systems . Ed . 3. Upper Sadd le River, NJ: P rentice hall, 2002.
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment