Investigating the Effects of Robot Engagement Communication on Learning from Demonstration
💡 Research Summary
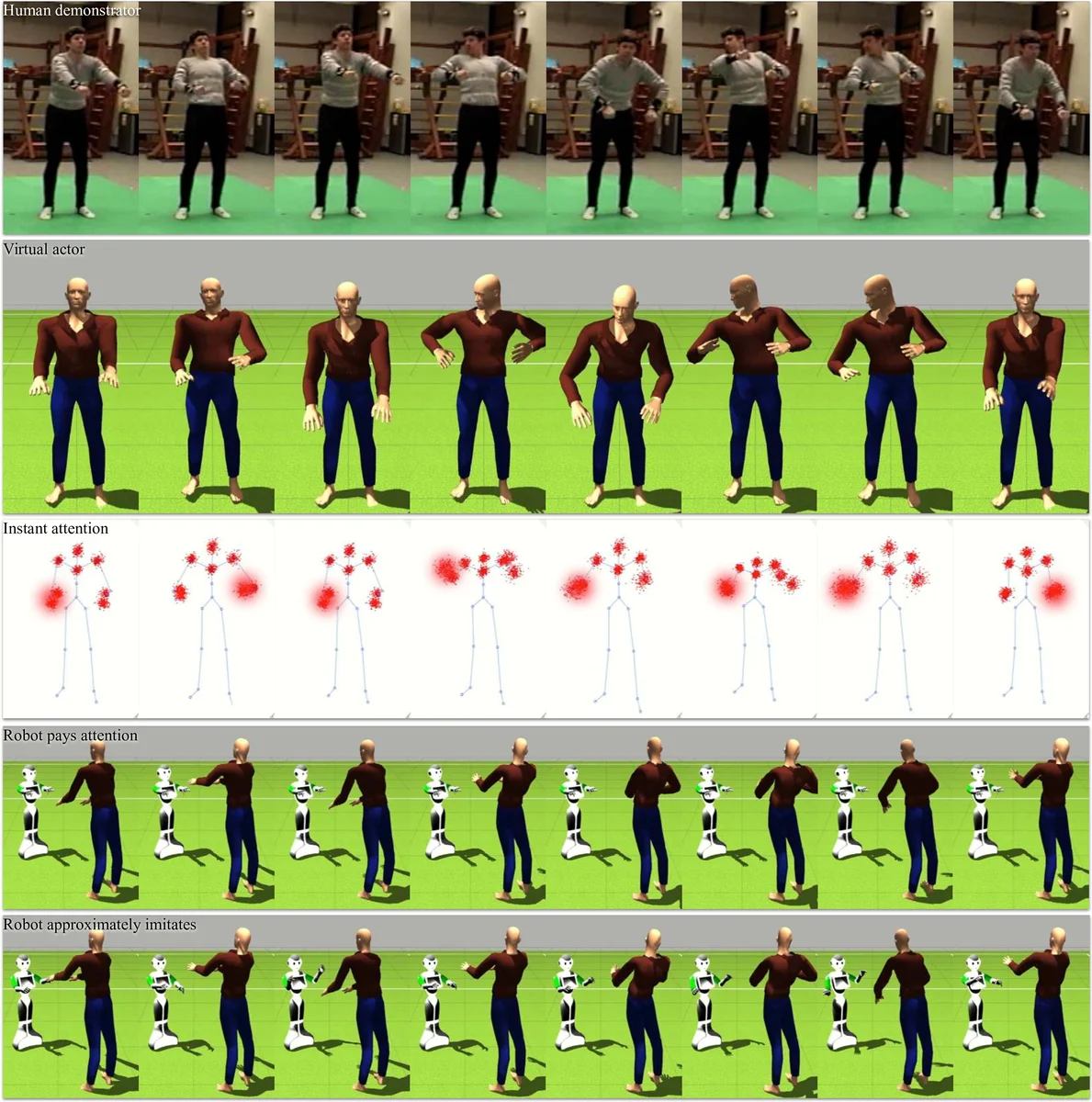
This paper investigates how a robot’s expression of learning engagement influences human instructors’ perceptions, expectations, and evaluations of demonstrations in Robot Learning from Demonstration (RLfD). While prior RLfD work has focused on policy‑derivation algorithms, the authors note that robots typically remain passive during the demonstration‑gathering phase, providing no feedback to the human teacher. Drawing on educational research that links learner engagement to instructor behavior, they propose to endow robots with two low‑cost, real‑time engagement cues: (1) Instant attention, which uses a particle filter to track the instructor’s body joints and selects the joint with the largest prediction error as the robot’s focus of attention; and (2) Approximate imitation, which maps the instructor’s joint rotations (derived from the transformation representation of the pose) onto the robot’s joints, producing a partial imitation of the demonstrated motion.
Combining these mechanisms yields three engagement communication modes: attention‑only, imitation‑only, and a hybrid of both. To assess their impact, the authors conduct a within‑subject user study in a simulation environment. Participants observe a humanoid robot learning various skills from a simulated demonstrator under four conditions: the three engagement modes and a baseline “no‑engagement” condition where the robot remains stationary. No actual learning algorithms are run; the robot’s behavior is limited to the engagement cues. After each condition, participants rate the robot’s learning capability, their expectation of the final learning outcome, and the perceived quality of the demonstrations.
Results show that any engagement cue significantly raises the perceived learning ability of the robot and increases expectations about its eventual performance, despite the robot not possessing a learning algorithm. Imitation cues have a stronger effect than attention cues across all metrics, and the hybrid condition produces the most pronounced positive evaluations. Moreover, participants judge the demonstrations to be of higher quality when the robot exhibits behavioral or hybrid engagement, even though the demonstrations are objectively identical across conditions.
The contributions are threefold: (1) two novel, computationally inexpensive algorithms for generating attention and imitation cues in skill‑oriented RLfD; (2) a simulation platform for evaluating engagement communication; and (3) the first systematic empirical study of how robot engagement cues affect human perceptions and expectations in RLfD. The findings suggest that adding non‑verbal engagement signals can shape instructor behavior and potentially improve the overall learning process. Limitations include reliance on a simulated environment and the absence of real‑world robot experiments; future work should validate the approach on physical robots, explore a broader range of tasks, and examine long‑term effects on learning efficiency and instructor feedback.
Comments & Academic Discussion
Loading comments...
Leave a Comment