Learning Instance Occlusion for Panoptic Segmentation
Panoptic segmentation requires segments of both "things" (countable object instances) and "stuff" (uncountable and amorphous regions) within a single output. A common approach involves the fusion of instance segmentation (for "things") and semantic s…
Authors: Justin Lazarow, Kwonjoon Lee, Kunyu Shi
Learning Instance Occlusion f or Panoptic Segmentation Justin Lazaro w ∗ Kwonjoon Lee ∗ Kun yu Shi ∗ Zhuo wen T u Uni versity of California San Die go { jlazarow, kwl042, kshi, ztu } @ucsd.edu Abstract P anoptic se gmentation r equires se gments of both “things” (countable object instances) and “stuff ” (un- countable and amorphous r egions) within a single output. A common appr oach in volves the fusion of instance seg- mentation (for “things”) and semantic se gmentation (for “stuff ”) into a non-o verlapping placement of se gments, and r esolves overlaps. However , instance or dering with detec- tion confidence do not corr elate well with natural occlusion r elationship. T o r esolve this issue , we pr opose a branc h that is tasked with modeling how two instance masks should overlap one another as a binary relation. Our method, named OCFusion, is lightweight but particularly effective in the instance fusion pr ocess. OCFusion is tr ained with the gr ound truth r elation derived automatically fr om the exist- ing dataset annotations. W e obtain state-of-the-art r esults on COCO and show competitive results on the Cityscapes panoptic se gmentation benchmark. 1. Introduction Image understanding has been a long standing problem in both human perception [ 1 ] and computer vision [ 25 ]. The image parsing framework [ 35 ] is concerned with the task of decomposing and segmenting an input image into con- stituents such as objects (text and f aces) and generic regions through the integration of image segmentation, object de- tection, and object recognition. Scene parsing is similar in spirit and consists of both non-parametric [ 33 ] and paramet- ric [ 40 ] approaches. After the initial dev elopment, the problem of image un- derstanding was studied separately as object detection (or extended to instance segmentation) and semantic segmenta- tion. Instance segmentation [ 27 , 28 , 5 , 20 , 10 , 29 , 39 , 15 ] re- quires the detection and segmentation of each thing (count- able object instance) within an image, while semantic seg- mentation [ 30 , 34 , 9 , 24 , 2 , 41 , 40 ] provides a dense per - pixel classification without distinction between instances within the same thing category . Kirillov et al . [ 17 ] proposed the panoptic segmentation task that combines the strength ∗ indicates equal contribution. Figure 1: An illustration of fusion using masks sorted by detection confidence alone [ 17 ] vs . with the ability to query for occlusions (OCFusion; ours). Occlude ( A, B ) = 0 in occlusion head means mask B should be placed on top of mask A . Mask R-CNN proposes three instance masks listed with decreasing confidence. The heuristic of [ 17 ] occludes all subsequent instances after the “person”, while our method retains them in the final output by querying the occlusion head. of semantic segmentation and instance se gmentation. In this task, each pixel in an image is assigned either to a back- ground class ( stuff ) or to a specific foreground object (an instance of things ). A common approach for panoptic segmentation has emerged in a number of works [ 16 , 19 , 38 ] that relies on combining the strong baseline architectures used in seman- tic se gmentation and instance segmentation into either a separate or shared architecture and then fusing the results from the semantic segmentation and instance segmentation branches into a single panoptic output. Since there is no ex- pectation of consistency in proposals between semantic and instance se gmentation branches, conflicts must be resolv ed. Furthermore, one must resolve conflicts within the instance segmentation branch as it proposes segmentations indepen- F P N F e a t u r e RP N R o Is R o IA l i g n M a x p o o l i n g 14 ⨯ 14 ⨯ 256 × 4 14 ⨯ 14 ⨯ 256 28 ⨯ 28 ⨯ 256 28 ⨯ 28 ⨯ C 28 ⨯ 28 ⨯ 1 M a x p o o l i n g 14 ⨯ 14 ⨯ 256 × 4 14 ⨯ 14 ⨯ 256 28 ⨯ 28 ⨯ 256 28 ⨯ 28 ⨯ C 28 ⨯ 28 ⨯ 1 14 ⨯ 14 ⨯ 514 ⨯ 3 14 ⨯ 14 ⨯ 512 7 ⨯ 7 ⨯ 512 1024 1 I n s t a n c e i c l a ss bo x I n s t a n c e j O c c l u s i o n m a t r i x Occl u d e ( , ) I n p u t C o nv o l ut i o n a n d U p s a m p l e M as k he ad S t u f f b r a n c h T h i n g b r a n c h F u s i o n m o d u l e I n st a n c e m a sk s S t uf f m ap O u t p u t O c c l u s i o n h e a d Figure 2: Illustration of the overall architectur e. The FPN is used as a shared backbone for both thing and stuff branches. In thing branch, Mask R-CNN will generate instance mask proposals, and the occlusion head will output binary values O cclude ( M i , M j ) (Equation 1 ) for each pair of mask proposals M i and M j with appr eciable overlap (larger than a threshold) to indicate occlusion relation between them. Occlusion head architecture is described in Section 2.4 . Fusion process is described in 2.3 . dent of each other . While a pixel in the panoptic output can only be assigned to a single class and instance, instance segmentation proposals are often o verlapping. T o handle these issues, Kirillo v et al . [ 17 ] proposed a fu- sion process similar to non-maximum suppression (NMS) that fav ors instance proposals ov er semantic proposals. Howe ver , we observe that occlusion relationships between different objects do not correlate well with object detection confidences used in this NMS-like fusion procedure [ 17 ], which therefore generally leads to poor performance when an instance that ov erlaps another ( e.g ., a tie on a shirt in Fig- ure 3a ) has lo wer detection confidence than the instance it should occlude. This can cause a large number of instances that Mask R-CNN successfully proposes fail to exist in the panoptic prediction (shown in Figure 1 ). Therefore, in this work, we focus on enriching the fu- sion process established by [ 17 ] with a binary relationship between instances to determine occlusion ordering. W e propose adding an additional branch (occlusion head) to the instance segmentation pipeline tasked with determin- ing which of two instance masks should lie on top of (or below) the other to resolv e occlusions in the fusion pro- cess. The proposed occlusion head can be fine-tuned easily on top of an existing Panoptic Feature Pyramid Networks (FPNs) [ 16 ] architecture with minimal dif ficulty . W e call our approach fusion with occlusion head (OCFusion). OC- Fusion brings significant performance gains on the COCO and Cityscapes panoptic segmentation benchmarks with low computational cost. 2. Learning Instance Occlusion f or Panoptic Fusion W e adopt the coupled approach of [ 16 ] that uses a shared Feature Pyramid Network (FPN) [ 21 ] backbone with a top- down process for semantic segmentation branch and Mask R-CNN [ 10 ] for instance segmentation branch. In this section, we first discuss the instance occlusion problem arising within the fusion heuristic introduced in [ 17 ] and then introduce OCFusion method to address the problem. The overall approach is sho wn in Figure 2 . 2.1. Fusion by confidence The fusion protocol in [ 17 ] adopts a greedy strategy dur - ing inference in an iterative manner . Instance proposals are first sorted in order of decreasing detection confidence. In each iteration, the proposal is skipped if its intersection with the mask of all already assigned pixels is abov e a certain ra- tio of τ . Otherwise, pixels in this mask that have yet to be assigned are assigned to the instance in the output. After all instance proposals of some minimum detection threshold are considered, the semantic segmentation is merged into the output by considering its pixels corresponding to each “stuff ” class. If the number of pixels exceeds some thresh- old after removing already assigned pixels, then these pixels are assigned to the corresponding “stuf f” cate gory . Pixels that are unassigned after this entire process are considered void predictions and hav e special treatment in the panoptic scoring process. W e denote this type of fusion as fusion by confidence . Softening the greed. The main weakness of the greedy fusion process is the complete reliance on detection confi- dences ( e.g . for Mask R-CNN, those from the box classi- fication score) for a tangential task. Detection scores not only ha ve little to do with mask quality ( e .g ., [ 13 ]), but they also do not incorporate any knowledge of layout . If the y are used in such a way , higher detection scores would im- ply a more foreground ordering. Often this is detrimental since Mask R-CNN exhibits behavior that can assign near- maximum confidence to very large objects ( e.g . see dining table images in Figure 3b ) that are both of poor mask qual- ity and not truly foreground. It is common to see images with a significant number of true instances suppressed in the panoptic output by a single instance with large area that was assigned the lar gest confidence. (a) (b) Figure 3: Images and ground truth masks from the COCO dataset. (a) is an example where ev en predicting the ground truth mask creates ambiguity when attempting to assign pixels to instances in a greedy manner . The baseline fusion process [ 17 ] is unable to properly assign these as shown in the 2nd and 4th images of the rightmost column whereas our method is able to handle the occlusion rela- tionship present as shown in the 1st and 3rd images of the rightmost column. (b) is an example where Mask R-CNN baseline produces an instance prediction that occludes the entire image and creates the same ambiguity in (a) despite an unambiguous ground truth annotation. Our approach softens this greedy fusion process with an occlusion head that is dedicated to predicting the binary re- lation between instances with appreciable o verlap so that instance occlusions can be properly handled. 2.2. Occlusion head f ormulation Consider two masks M i and M j proposed by an in- stance segmentation model, and denote their intersection as I ij = M i ∩ M j . W e are interested in the case where one of the masks is heavily occluded by the other . Therefore, we consider their respectiv e intersection ratios R i = Area ( I ij ) / Area ( M i ) and R j = Area ( I ij ) / Area ( M j ) where Area ( M ) denotes the number of “on” pixels in mask M . As noted in Section 2.1 , the fusion process considers the intersection of the current instance proposal with the mask consisting of all already claimed pixels. Here, we are look- ing at the intersection between two masks and denote the threshold as ρ . If either R i ≥ ρ or R j ≥ ρ , we define these two masks as having appreciable overlap. In this case, we must then decide which instance the pixels in I ij should belong to. W e attempt to answer this by learning a binary relation Occlude ( M i , M j ) such that whenever M i and M j hav e appreciable intersection: Occlude ( M i , M j ) = 1 if M i should be placed on top of M j 0 if M j should be placed on top of M i . (1) 2.3. Fusion with occlusion head W e no w describe our modifications to the inference-time fusion heuristic of [ 17 ] that incorporates Occlude ( M i , M j ) in Algorithm 1 . After the instance fusion component has completed, the semantic segmentation is then incorporated as usual, only considering pixels assigned to stuf f classes and determin- ing whether the number of unassigned pixels correspond- ing to the class in the current panoptic output exceeds some threshold, e.g ., 4096. The instance fusion process is illus- trated in Figure 1 . 2.4. Occlusion head architectur e W e implement Occlude ( M i , M j ) as an additional “head” within Mask R-CNN [ 10 ]. Mask R-CNN already contains two heads: a box head that is tasked with tak- ing region proposal network (RPN) proposals and refining the bounding box as well as assigning classification scores, while the mask head predicts a fixed size binary mask (usu- ally 28 × 28 ) for all classes independently from the output of the box head. Each head derives its own set of features from the underlying FPN. W e name our additional head, the “occlusion head” and implement it as a binary classifier that takes two (soft) masks M i and M j along with their respec- tiv e FPN features (determined by their respectiv e boxes) as input. The classifier output is interpreted as the v alue of Occlude ( M i , M j ) . Algorithm 1 Fusion with Occlusion Head. P is H × W matrix, initially empty . ρ is a hyperparameter , the minimum intersection ratio for occlusion. τ is a hyperparameter . for each proposed instance mask M i do C i = M i − P pixels in M i that are not assigned in P for j < i do each already merged segment I ij is the intersection between mask M i and M j . R i = Area ( I ij ) / Area ( M i ) . R j = Area ( I ij ) / Area ( M j ) . if R i ≥ ρ or R j ≥ ρ then significant intersection if Occlude ( M i , M j ) = 1 then C i = C i S ( C j T I ij ) . C j = C j − I ij . end if end if end for if Area ( C i ) / Area ( M i ) ≤ τ then continue else assign the pixels in C i to the panoptic mask P . end if end for The architecture of occlusion head is inspired by [ 13 ] as shown in Figure 2 . For two mask representations M i and M j , we apply max pooling to produce a 14 × 14 representa- tion and concatenate each with the corresponding RoI fea- tures to produce the input to the head. Three layers of 3 × 3 con volutions with 512 feature maps and stride 1 are applied before a final one with stride 2. The features are then flat- tened before a 1024 dimensional fully connected layer and finally projected to a single logit. 2.5. Ground truth occlusion W e use ground truth panoptic mask along with ground truth instance masks to deriv e ground truth occlusion rela- tion. W e pre-compute the intersection between all pairs of masks with appreciable overlap. W e then find the pixels corresponding to the intersection of the masks in the panop- tic ground truth. W e determine the instance occlusion based on which instance owns the majority of pixels in the inter- section. W e store the resulting “occlusion matrix” for each image in an N i × N i matrix where N i is the number of instances in the image and the value at position ( i, j ) is ei- ther − 1 , indicating no occlusion, or encodes the value of Occlude ( i, j ) . 2.6. Occlusion head training During training, the occlusion head is designed to first find pairs of predicted masks that match to different ground truth instances. Then, the intersection between these pairs of masks is computed, and the ratio of the intersection to mask area taken. A pair of masks is added for consider- ation when one of these ratios is at least as large as the pre-determined threshold ρ . W e then subsample the set of all pairs meeting this criterion to decrease computational cost. It is desirable for the occlusion head to reflect the consistency of Occlude, therefore we also in vert all pairs so that Occlude ( M i , M j ) = 0 ⇐ ⇒ Occlude ( M j , M i ) = 1 whenev er the pair ( M i , M j ) meets the intersection criteria. This also mitigates class imbalance. Since this is a binary classification problem, the overall loss L o from the occlu- sion head is giv en by the binary cross-entropy over all sub- sampled pairs of masks that meet the intersection criteria. 3. Related work Next, we discuss in detail the difference between OCFu- sion and the e xisting approaches for panoptic segmentation, occlusion ordering, and non-maximum suppression. Panoptic segmentation . The task of panoptic segmentation is introduced in [ 17 ] along with a baseline where predic- tions from instance segmentation (Mask R-CNN [ 10 ]) and semantic segmentation (PSPNet [ 40 ]) are combined via a heuristics-based fusion strategy . A stronger baseline based on a single Feature Pyramid Network (FPN) [ 21 ] backbone followed by multi-task heads consisting of semantic and in- stance segmentation branches is concurrently proposed by [ 19 , 18 , 16 , 38 ]. On top of this baseline, attention layers are added in [ 19 ] to the instance se gmentation branch, which are guided by the semantic segmentation branch; a loss term enforcing consistency between things and stuff predictions is then introduced in [ 18 ]; a parameter-free panoptic head which computes the final panoptic mask by pasting instance mask logits onto semantic segmentation logits is presetned in [ 38 ]. These works hav e been making steady progress in panoptic segmentation, but their focus is not to address the problem for explicit reasoning of instance occlusion. Occlusion ordering and lay out learning. Occlusion han- dling is a long-studied computer vision task [ 36 , 8 , 32 , 11 ]. In the context of semantic se gmentation, occlusion order- ing has been adopted in [ 33 , 3 , 42 ]. A repulsion loss is added to a pedestrian detection algorithm [ 37 ] to deal with the crowd occlusion problem, b ut it focuses on detection only , without instance segmentation. In contrast, we study the occlusion ordering problem for instance maps in panop- tic segmentation. Closest to our method is the recent work of [ 23 ], which proposes a panoptic head to resolve this is- sue in a similar manner to [ 38 ] but instead with a learnable con volution layer . Since our occlusion head can deal with two arbitrary masks, it of fers more flexibility ov er these ap- proaches which attempt to “rerank” the masks in a linear fashion [ 38 , 23 ]. Furthermore, the approach of [ 23 ] is based off how a class should be placed on top of another class (akin to semantic segmentation) while we explicitly model the occlusion relation between arbitrary instances . This al- lows us to lev erage the intra-class occlusion relations such as “which of these two persons should occlude the other?”, and we sho w this leads to a gain in Figure 7 and T able 9 . In a nutshell, we tackle the occlusion problem in a scope that is more general than [ 23 ] with noticeable performance advantage, as sho wn in T able 2 and T able 3 . Learnable NMS . One can relate resolving occlusions to non-maximum suppression (NMS) that is applied to boxes , while our method tries to suppress intersections between masks. Our method acts as a learnable version of NMS for instance masks with similar computations to the analogous ideas for boxes such as [ 12 ]. 4. Experiments 4.1. Implementation details W e extend the Mask R-CNN benchmark framew ork [ 26 ], b uilt on top of PyT orch, to implement our architec- ture. Batch normalization [ 14 ] layers are frozen and not fine-tuned for simplicity . W e perform experiments on the COCO dataset [ 22 ] [ 17 ] as well as the Cityscapes dataset [ 4 ] with panoptic annotations. W e find the most stable and efficient way to train the occlusion head is by fine-tuning with all other parameters frozen. W e add a single additional loss only at fine-tuning time so that the total loss during panoptic training is L = λ i ( L c + L b + L m ) + λ s L s where L c , L b , and L m are the box head classification loss, bounding-box regression loss, and mask loss while L s is the semantic se gmentation cross- entropy loss. At fine-tuning time, we only minimize L o , the classification loss from the occlusion head. W e subsample 128 mask occlusions per image. During fusion, we only consider instance masks with detection confidence of at least 0 . 5 or 0 . 6 and reject seg- ments during fusion when their o verlap ratio with the e xist- ing panoptic mask (after occlusions are resolved) exceeds τ = 0 . 5 on COCO and τ = 0 . 6 on Cityscapes. Lastly , when considering the segments of stuff generated from the semantic segmentation, we only consider those which hav e at least 4096 pixels remaining after discarding those already assigned on COCO and 2048 on Cityscapes. Semantic head. On COCO, repeat the combination of 3 × 3 con volution and 2 × bilinear upsampling until 1 / 4 scale is reached, following the design of [ 16 ]. For the model with ResNeXt-101 backbone, we replace each conv olution with deformable con volution [ 6 ]. For ResNet-50 backbone, we additionally add one experiment that adopts the design from [ 38 ] which uses 2 layers of deformable con volution followed by a bilinear upsampling to the 1 / 4 scale. On Cityscapes, we adopt the design from [ 38 ]. COCO. The COCO 2018 panoptic segmentation task con- sists of 80 thing and 53 stuff classes. W e use 2017 dataset which has a split of 118k/5k/20k for training, validation and testing respectiv ely . Cityscapes. Cityscapes consists of 8 thing classes and 11 stuff classes. W e use only fine dataset with a split of 2975/500/1525 for training, validation and testing respec- tiv ely . COCO training. W e train the FPN-based architecture de- scribed in [ 16 ] for 90K iterations on 8 GPUs with 1 im- age per GPU. The base learning rate of 0.02 is reduced by 10 at both 60k and 80k iterations. W e then proceed to fine-tune with the occlusion head for 2500 more iter- ations. W e choose λ i = 1 . 0 and λ s = 0 . 5 while for the occlusion head we choose the intersection ratio ρ as 0.2. For models with ResNet-50 and ResNet-101 backbone, we use random horizontal flipping as data augmentation. For model with ResNeXt-101 backbone, we additionally use scale jitter (with scale of shorter image edge equals to { 640 , 680 , 720 , 760 , 800 } ). Cityscapes training. W e randomly rescale each image by 0.5 to 2 × (scale factor sampled from a uniform distrib ution) and construct each batch of 16 (4 images per GPU) by ran- domly cropping images of size 512 × 1024. W e train for 65k iterations with a base learning rate of 0.01 with decay at 40k and 55k iterations. W e fine-tune the occlusion head for 5000 more iterations. W e choose λ i = λ s = 1 . 0 with intersection ratio ρ as 0.1. W e do not pretrain on COCO. Panoptic segmentation metrics. W e adopt the panoptic quality (PQ) metric from [ 17 ] to measure panoptic se gmen- tation performance. This single metric captures both seg- mentation and recognition quality . PQ can be further bro- ken down into scores specific to things and stuff , denoted PQ Th and PQ St , respectiv ely . Multi-scale testing. W e adopt the same scales as [ 38 ] for both COCO and Cityscapes multi-scale testing. F or the stuff branch, we av erage the multi-scale semantic logits of semantic head. For the thing branch, we average the multi- scale masks and choose not to do bounding box augmenta- tion for simplicity . Method Backbone PQ PQ Th PQ St Baseline ResNet-50 39.5 46.5 29.0 OCFusion ResNet-50 41.3 49.4 29.0 relativ e improvement +1.8 +3.0 +0.0 Baseline ResNet-101 41.0 47.9 30.7 OCFusion ResNet-101 43.0 51.1 30.7 relativ e improvement +2.0 +3.2 +0.0 T able 1: Comparison to our implementation of Panoptic FPN [ 16 ] baseline model on the MS-COCO val dataset . Method Backbone m.s. test PQ PQ Th PQ St JSIS-Net [ 7 ] ResNet-50 26.9 29.3 23.3 Panoptic FPN [ 16 ] ResNet-50 39.0 45.9 28.7 Panoptic FPN [ 16 ] ResNet-101 40.3 47.5 29.5 A UNet [ 19 ] ResNet-50 39.6 49.1 25.2 UPSNet ∗ [ 38 ] ResNet-50 42.5 48.5 33.4 UPSNet ∗ [ 38 ] ResNet-50 X 43.2 49.1 34.1 O ANet [ 23 ] ResNet-50 39.0 48.3 24.9 O ANet [ 23 ] ResNet-101 40.7 50.0 26.6 AdaptIS [ 31 ] ResNet-50 35.9 40.3 29.3 AdaptIS [ 31 ] ResNet-101 37 41.8 29.9 AdaptIS [ 31 ] ResNeXt-101 42.3 49.2 31.8 OCFusion ResNet-50 41.3 49.4 29.0 OCFusion ∗ ResNet-50 42.5 49.1 32.5 OCFusion ResNet-101 43.0 51.1 30.7 OCFusion ∗ ResNeXt-101 45.7 53.1 34.5 OCFusion ResNet-50 X 41.9 49.9 29.9 OCFusion ∗ ResNet-50 X 43.3 50.0 33.8 OCFusion ResNet-101 X 43.5 51.5 31.5 OCFusion ∗ ResNeXt-101 X 46.3 53.5 35.4 T able 2: Comparison to prior work on the MS-COCO val dataset. m.s. stands for multi-scale testing. ∗ Used de- formable con volution. Method Backbone m.s. test PQ PQ Th PQ St JSIS-Net [ 7 ] ResNet-50 27.2 29.6 23.4 Panoptic FPN [ 16 ] ResNet-101 40.9 48.3 29.7 O ANet [ 23 ] ResNet-101 41.3 50.4 27.7 A UNet [ 19 ] ResNeXt-152 X 46.5 55.9 32.5 UPSNet ∗ [ 38 ] ResNet-101 X 46.6 53.2 36.7 AdaptIS [ 31 ] ResNeXt-101 42.8 50.1 31.8 OCFusion ∗ ResNeXt-101 X 46.7 54.0 35.7 T able 3: Comparison to prior work on the MS-COCO test-dev dataset. m.s. stands for multi-scale testing. ∗ Used deformable con volution. 4.2. COCO panoptic benchmark W e obtain state-of-the-art results on COCO Panoptic Segmentation validation set with and without multi-scale testing as is shown in 2 . W e also obtain single model state- of-the-art results on the COCO test-de v set, as sho wn in T a- ble 3 . In order to show the effecti veness of our method, we compare to our baseline model in T able 1 , and the results show that our method consistently provides significant gain on PQ Th as well as PQ. 4.3. Cityscapes panoptic benchmark W e obtain competitiv e results on the Cityscapes valida- tion set and the best results among models with a ResNet-50 backbone, sho wn in T able 5 . T able 4 sho ws our strong rela- tiv e improvement ov er the baseline on PQ Th as well as PQ. Method PQ PQ Th PQ St Baseline 58.6 51.7 63.6 OCFusion 59.3 53.5 63.6 relativ e improvement +0.7 +1.7 +0.0 T able 4: Comparison to our implementation of Panoptic FPN [ 16 ] baseline model on the Cityscapes val dataset . All results are based on a ResNet-50 backbone. Method m.s. test PQ PQ Th PQ St Panoptic FPN [ 16 ] 57.7 51.6 62.2 A UNet [ 19 ] 56.4 52.7 59.0 UPSNet ∗ [ 38 ] 59.3 54.6 62.7 UPSNet ∗ [ 38 ] X 60.1 55.0 63.7 AdaptIS [ 31 ] 59.0 55.8 61.3 OCFusion ∗ 59.3 53.5 63.6 OCFusion ∗ X 60.2 54.0 64.7 T able 5: Comparison to prior w ork on the Cityscapes val dataset. All results are based on a ResNet-50 backbone. m.s. stands for multi-scale testing. ∗ Used deformable con- volution. 4.4. Occlusion head perf ormance In order to better gauge the performance of the occlu- sion head, we determine its classification accuracy on both COCO and Cityscapes validation dataset at ρ = 0 . 20 with ResNet-50 backbone. W e measure the accuracy of the oc- clusion head in predicting the true ordering gi ven ground truth boxes and masks. The occlusion head classification accuracy on COCO and Cityscapes is 91.58% and 93.60%, respectiv ely , which validates the ef fectiv eness of OCFusion. 4.5. Inference time analysis W e analyze the computational cost of our method and empirically show the inference time ov erhead of our method compared to the baseline model. While our method incurs an O ( n 2 ) cost in order to compute pairwise intersections, where n is the number of instances, this computation is only needed for the subset of masks whose detection confidence is larger than a threshold (0.5 or 0.6 usually) as dictated by the P anoptic FPN [ 16 ] baseline. This filtering greatly limits Figure 4: Comparison against Kirillov et al. [ 16 ] which uses fusion by confidence. Figure 5: Comparison against Spatial Ranking Module [ 23 ]. Figure 6: Comparison against UPSNet [ 38 ]. the practical magnitude of n . Furthermore, only the sub- set of remaining mask pairs that have appreciable ov erlap (larger than ρ ) requires ev aluation by the occlusion head. W e measure this inference time ov erhead in T able 6 . OC- Fusion incurs a modest 2.0% increase in computational time on COCO and 4.7% increase on Cityscapes. Method COCO Cityscapes Baseline 153 378 OCFusion 156 396 Change in runtime (ms) +3 +18 T able 6: Runtime (ms) overhead per image. Runtime re- sults are av eraged over the entire COCO and Cityscapes val- idation dataset. W e use a single GeForce GTX 1080 T i GPU and Xeon(R) CPU E5-2687W CPU. 4.6. V isual comparisons Since panoptic se gmentation is a relati vely ne w task, the most recent papers of fer only comparisons ag ainst the base- line presented in [ 17 ]. W e additionally compare with a fe w other recent methods [ 23 , 38 ]. W e first compare our method against [ 16 ] in Figure 4 as well as two recent works: UPSNet [ 38 ] in Figure 6 and the Spatial Ranking Module of [ 23 ] in Figure 5 . The latter two hav e similar underlying architectures alongside modi- fications to their fusion process. W e note that except for comparisons between [ 16 ], the comparison images sho wn are those included in the r espective papers and not of our own choosing . Overall, we see that our method is able to preserve a significant number of instance occlusions lost by other methods while maintaining more realistic fusions, e.g ., the arm is entirely above the man versus sinking behind partly as in “fusion by confidence”. Figure 7: Comparison for w/o (left) or w/ (right) intra- class capability enabled. Best viewed in color . 4.7. Ablation experiments W e study the sensitivity of our method to the hyperpa- rameters τ and ρ in T able 7 for COCO and T able 8 for Cityscapes. W e also include the number of examples of oc- clusions we are able to collect at the gi ven ρ denoted as N. Naturally , a larger ρ leads to less spurious occlusions but ( τ , ρ ) 0.05 0.10 0.20 0.4 41.27 (Th: 49.43, St: 28.97) 41.22 (Th: 49.33, St: 28.97) 41.20 (Th: 49.30, St: 28.97) 0.5 41.20 (Th: 49.32, St: 28.95) 41.15 (Th: 49.23, St: 28.95) 41.24 (Th: 49.29, St: 29.10) 0.6 41.09 (Th: 49.15, St: 28.93) 41.03 (Th: 49.03, St: 28.93) 41.02 (Th: 49.02, St: 28.93) N 192,519 157,784 132,165 T able 7: COCO Hyperparameter Ablation: PQ ( τ , ρ ) 0.05 0.10 0.20 0.4 58.76 (Th: 52.10, St: 63.62) 59.15 (Th: 53.00, St: 63.62) 59.07 (Th: 52.80, St: 63.63) 0.5 59.18 (Th: 53.09, St: 63.61) 59.26 (Th: 53.28, St: 63.61) 59.22 (Th: 53.19, St: 63.61) 0.6 59.21 (Th: 53.17, St: 63.61) 59.33 (Th: 53.46, St: 63.60) 58.70 (Th: 51.96, St: 61.60) N 33,391 29,560 6,617 T able 8: Cityscapes Hyperparameter Ablation: PQ decreases the o verall number of examples that the occlusion head is able to learn from. Intra-class instance occlusion in Cityscapes is a chal- lenging problem, also noted in [ 10 ]. Since we can enable inter-class or intra-class occlusion query ability indepen- dently , we sho w ablation results in T able 9 that highlight the importance of being able to handle intra-class occlusion on. W e belie ve this sets our method apart from others, e.g ., [ 23 ] which simplifies the problem by handling inter -class occlu- sion only . Additionally , Figure 7 shows a visual compari- son between resulting panoptic segmentations when intra- class occlusion handling is toggled on Cityscapes. Only the model with intra-class handling enabled can handle the oc- cluded cars better during the fusion process. Inter -class Intra-class PQ PQ Th PQ St 58.6 51.7 63.6 X 59.2 (+0.5) 53.0 (+1.3) 63.6 (+0.0) X X 59.3 (+0.7) 53.5 (+1.7) 63.6 (+0.0) T able 9: Ablation study on different types of occlusion on the Cityscapes val dataset. X means capability enabled. 5. Conclusion W e have introduced an explicit notion of instance occlusion to Mask R-CNN so that instances may be effecti vely fused when producing a panoptic segmentation. W e assemble a dataset of occlusions already present in the COCO and Cityscapes datasets and then learn an additional head for Mask R-CNN tasked with predicting occlusion between two masks. Adding occlusion head on top of Panoptic FPN incurs minimal ov erhead, and we show that it is effecti ve e ven when trained for fe w thousand iterations. In the future, we hope to explore how further understanding of occlusion, including relationships of stuff , could be helpful. Acknowledgements . This work is supported by NSF IIS- 1618477 and IIS-1717431. W e thank Y ifan Xu, W eijian Xu, Sainan Liu, Y u Shen, and Subarna T ripathi for v aluable dis- cussions. Also, we appreciate the anonymous re vie wers for their helpful and constructiv e comments and suggestions. References [1] Irving Biederman. Recognition-by-components: a the- ory of human image understanding. Psyc hological r eview , 94(2):115, 1987. 1 [2] Liang-Chieh Chen, George Papandreou, Iasonas Kokkinos, Ke vin Murphy , and Alan L Y uille. Deeplab: Semantic image segmentation with deep con volutional nets, atrous conv olu- tion, and fully connected crfs. IEEE transactions on pattern analysis and machine intelligence , 40(4):834–848, 2018. 1 [3] Y i-Ting Chen, Xiaokai Liu, and Ming-Hsuan Y ang. Multi- instance object segmentation with occlusion handling. In CVPR , 2015. 4 [4] Marius Cordts, Mohamed Omran, Sebastian Ramos, T imo Rehfeld, Markus Enzweiler, Rodrigo Benenson, Uwe Franke, Stefan Roth, and Bernt Schiele. The cityscapes dataset for semantic urban scene understanding. In CVPR , 2016. 5 [5] Jifeng Dai, Kaiming He, and Jian Sun. Instance-aware se- mantic segmentation via multi-task network cascades. In CVPR , 2016. 1 [6] Jifeng Dai, Haozhi Qi, Y uwen Xiong, Y i Li, Guodong Zhang, Han Hu, and Y ichen W ei. Deformable con volutional networks. In ICCV , 2017. 5 [7] Daan de Geus, Panagiotis Meletis, and Gijs Dubbelman. Panoptic segmentation with a joint semantic and instance segmentation network. arXiv preprint , 2018. 6 [8] Markus Enzweiler , Angela Eigenstetter , Bernt Schiele, and Dariu M Gavrila. Multi-cue pedestrian classification with partial occlusion handling. In CVPR , 2010. 4 [9] Mark Everingham, Luc V an Gool, Christopher KI Williams, John W inn, and Andre w Zisserman. The pascal visual object classes (voc) challenge. International journal of computer vision , 88(2):303–338, 2010. 1 [10] Kaiming He, Georgia Gkioxari, Piotr Doll ´ ar , and Ross Gir- shick. Mask r-cnn. In ICCV , 2017. 1 , 2 , 3 , 4 , 8 [11] Derek Hoiem, Andre w N Stein, Alexei A Efros, and Mar- tial Hebert. Reco vering occlusion boundaries from a single image. In ICCV , 2007. 4 [12] Jan Hosang, Rodrigo Benenson, and Bernt Schiele. Learning non-maximum suppression. In CVPR , 2017. 5 [13] Zhaojin Huang, Lichao Huang, Y ongchao Gong, Chang Huang, and Xinggang W ang. Mask scoring r-cnn. In CVPR , 2019. 3 , 4 [14] Serge y Ioffe and Christian Szegedy . Batch normalization: Accelerating deep network training by reducing internal co- variate shift. In ICML , 2015. 5 [15] Long Jin, Ze yu Chen, and Zhuowen T u. Object detection free instance segmentation with labeling transformations. arXiv pr eprint arXiv:1611.08991 , 2016. 1 [16] Alexander Kirillov , Ross Girshick, Kaiming He, and Piotr Doll ´ ar . Panoptic feature pyramid networks. In CVPR , 2019. 1 , 2 , 4 , 5 , 6 , 7 , 8 [17] Alexander Kirillov , Kaiming He, Ross Girshick, Carsten Rother , and Piotr Doll ´ ar . Panoptic segmentation. In CVPR , 2019. 1 , 2 , 3 , 4 , 5 , 8 [18] Jie Li, Allan Rav entos, Arjun Bhargav a, T akaaki T agaw a, and Adrien Gaidon. Learning to fuse things and stuff. arXiv pr eprint arXiv:1812.01192 , 2018. 4 [19] Y anwei Li, Xinze Chen, Zheng Zhu, Lingxi Xie, Guan Huang, Dalong Du, and Xingang W ang. Attention-guided unified network for panoptic segmentation. In CVPR , 2019. 1 , 4 , 6 [20] Xiaodan Liang, Liang Lin, Y unchao W ei, Xiaohui Shen, Jianchao Y ang, and Shuicheng Y an. Proposal-free network for instance-level object segmentation. IEEE transactions on pattern analysis and machine intelligence , 40(12):2978– 2991, 2018. 1 [21] Tsung-Y i Lin, Piotr Doll ´ ar , Ross B. Girshick, Kaiming He, Bharath Hariharan, and Serge J. Belongie. Feature pyramid networks for object detection. In CVPR , 2017. 2 , 4 [22] Tsung-Y i Lin, Michael Maire, Serge Belongie, James Hays, Pietro Perona, Dev a Ramanan, Piotr Doll ´ ar , and C La wrence Zitnick. Microsoft coco: Common objects in context. In ECCV , 2014. 5 [23] Huanyu Liu, Chao Peng, Changqian Y u, Jingbo W ang, Xu Liu, Gang Y u, and W ei Jiang. An end-to-end network for panoptic segmentation. In CVPR , 2019. 4 , 5 , 6 , 7 , 8 [24] Jonathan Long, Evan Shelhamer, and Tre vor Darrell. Fully con volutional networks for semantic segmentation. In CVPR , 2015. 1 [25] David Marr . V ision: A computational inv estigation into the human representation and processing of visual information, henry holt and co. Inc., New Y ork, NY , 2(4.2), 1982. 1 [26] Francisco Massa and Ross Girshick. maskrcnn-benchmark: Fast, modular reference implementation of Instance Seg- mentation and Object Detection algorithms in PyT orch. https://github.com/facebookresearch/ maskrcnn- benchmark , 2018. Accessed: January 5, 2019. 5 [27] Pedro O Pinheiro, Ronan Collobert, and Piotr Dollar . Learn- ing to segment object candidates. In NIPS , 2015. 1 [28] Pedro O. Pinheiro, Tsung-Y i Lin, Ronan Collobert, and Piotr Dollr . Learning to refine object segments. In ECCV , 2016. 1 [29] Hayko Riemenschneider, Sabine Sternig, Michael Donoser , Peter M Roth, and Horst Bischof. Hough regions for joining instance localization and segmentation. In ECCV . 2012. 1 [30] Jamie Shotton, John W inn, Carsten Rother , and Antonio Cri- minisi. T extonboost: Joint appearance, shape and context modeling for multi-class object recognition and segmenta- tion. In ECCV , 2006. 1 [31] K onstantin Sofiiuk, Olga Barinov a, and Anton Konushin. Adaptis: Adaptiv e instance selection network. In ICCV , 2019. 6 [32] Jian Sun, Y in Li, Sing Bing Kang, and Heung-Y eung Shum. Symmetric stereo matching for occlusion handling. In CVPR , 2005. 4 [33] Joseph Tighe, Marc Niethammer , and Svetlana Lazebnik. Scene parsing with object instances and occlusion ordering. In CVPR , 2014. 1 , 4 [34] Zhuowen T u. Auto-context and its application to high-level vision tasks. In CVPR , 2008. 1 [35] Zhuowen Tu, Xiangrong Chen, Alan L Y uille, and Song- Chun Zhu. Image parsing: Unifying segmentation, detection, and recognition. International Journal of computer vision , 63(2):113–140, 2005. 1 [36] Xiaoyu W ang, T ony X Han, and Shuicheng Y an. An hog-lbp human detector with partial occlusion handling. In ICCV , 2009. 4 [37] Xinlong W ang, T ete Xiao, Y uning Jiang, Shuai Shao, Jian Sun, and Chunhua Shen. Repulsion loss: Detecting pedestri- ans in a crowd. In CVPR , 2018. 4 [38] Y uwen Xiong, Renjie Liao, Hengshuang Zhao, Rui Hu, Min Bai, Ersin Y umer, and Raquel Urtasun. Upsnet: A unified panoptic segmentation network. In CVPR , 2019. 1 , 4 , 5 , 6 , 7 , 8 [39] Ziyu Zhang, Sanja Fidler, and Raquel Urtasun. Instance- lev el segmentation for autonomous driving with deep densely connected mrfs. In CVPR , 2016. 1 [40] Hengshuang Zhao, Jianping Shi, Xiaojuan Qi, Xiaogang W ang, and Jiaya Jia. Pyramid scene parsing network. In CVPR , 2017. 1 , 4 [41] Shuai Zheng, Sadeep Jayasumana, Bernardino Romera- Paredes, V ibhav V ineet, Zhizhong Su, Dalong Du, Chang Huang, and Philip HS T orr . Conditional random fields as recurrent neural networks. In ICCV , 2015. 1 [42] Y an Zhu, Y uandong T ian, Dimitris Metaxas, and Piotr Doll ´ ar . Semantic amodal segmentation. In CVPR , 2017. 4
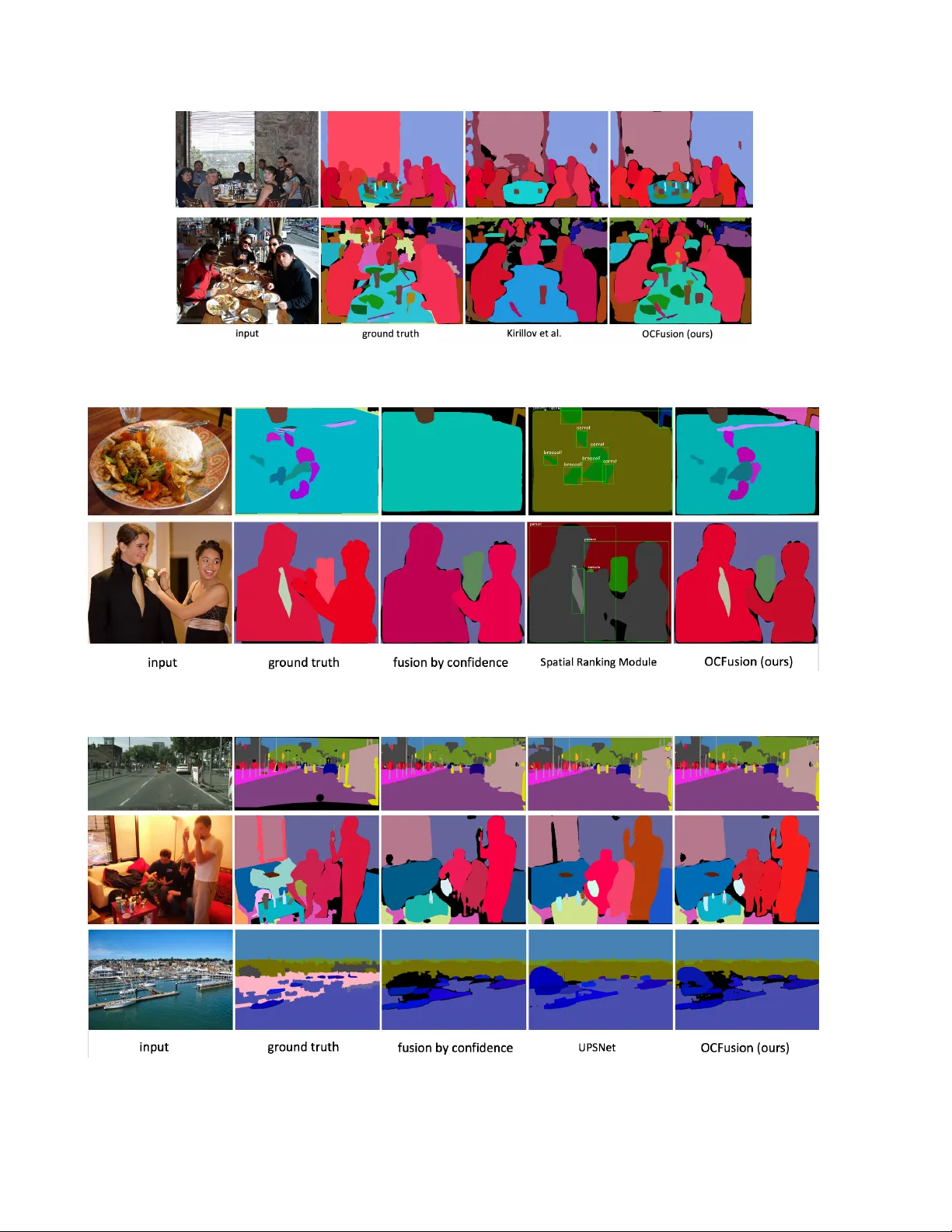
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment