Distributed Embodied Evolution over Networks
In several network problems the optimum behavior of the agents (i.e., the nodes of the network) is not known before deployment. Furthermore, the agents might be required to adapt, i.e. change their behavior based on the environment conditions. In these scenarios, offline optimization is usually costly and inefficient, while online methods might be more suitable. In this work, we use a distributed Embodied Evolution approach to optimize spatially distributed, locally interacting agents by allowing them to exchange their behavior parameters and learn from each other to adapt to a certain task within a given environment. Our results on several test scenarios show that the local exchange of information, performed by means of crossover of behavior parameters with neighbors, allows the network to conduct the optimization process more efficiently than the cases where local interactions are not allowed, even when there are large differences on the optimal behavior parameters within each agent’s neighborhood.
💡 Research Summary
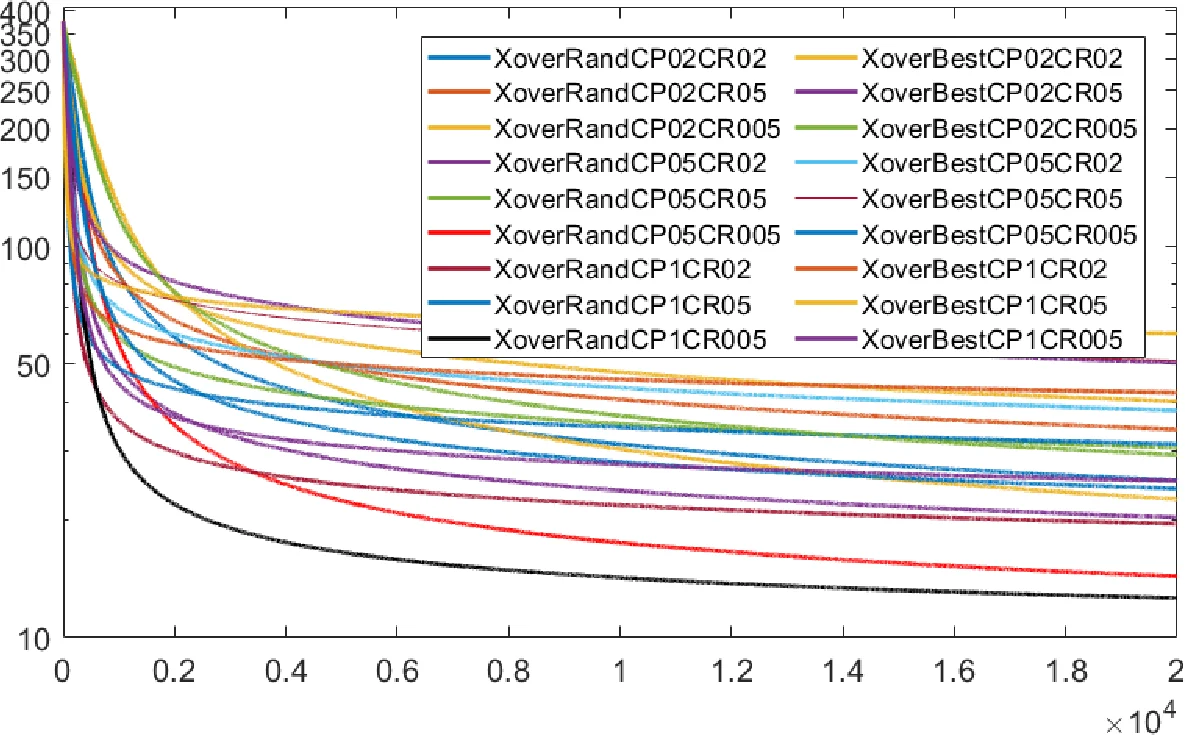
The paper introduces a distributed Embodied Evolution (EE) framework designed for networks of agents whose optimal behaviors are unknown a priori and must adapt to changing environments. Each node runs a population‑less evolutionary algorithm locally, maintaining its own genotype (behavior parameters). The core mechanism consists of two operators applied sequentially: (1) crossover with a neighbor’s genotype, selected either as the best‑performing neighbor or a random neighbor, controlled by a crossover probability (cp) and a crossover rate (cr); and (2) Gaussian mutation with standard deviation σ. When the genotype contains a single parameter, arithmetic averaging is used; otherwise element‑wise copying implements the crossover.
Three experimental domains are used to evaluate the approach. The first (“Imitation”) maps a 28 × 28 grid of agents to the 100‑frame MNIST digit sequence, requiring each agent to evolve 100 time‑step intensity values. The second (“Illumination”) involves agents that must collectively reproduce a synthetic lighting pattern in a 2‑D environment, with each agent controlling one to three brightness parameters. The third is a realistic IoT scenario where agents form irregular, non‑grid topologies and collaboratively train a data‑driven model for human presence detection. For each domain, five algorithmic variants are compared: pure hill‑climbing (mutation only), random‑neighbor crossover, best‑neighbor crossover, and a hybrid that probabilistically mixes the two.
Results consistently show that any form of local information exchange outperforms pure hill‑climbing. Best‑neighbor crossover yields the fastest convergence when neighbor fitnesses are similar, while random‑neighbor crossover is more robust when optimal parameters differ strongly across the neighborhood. The optimal crossover probability lies between 0.2 and 0.5; higher values reduce exploration and cause premature convergence. Mutation rates around σ = 0.05–0.1 balance exploration and precision, whereas too small σ stalls evolution and too large σ destabilizes convergence. Even when optimal behaviors diverge markedly among neighbors, crossover still provides a net benefit, confirming that sharing genetic material creates useful exploratory directions rather than merely copying the current best.
The authors claim four main contributions: (1) extending EE to IoT and sensor‑network contexts, a domain previously dominated by swarm‑robotics applications; (2) explicitly handling heterogeneous local fitness functions and demonstrating that information sharing remains advantageous; (3) providing an extensive parametric study of crossover and mutation settings with rigorous statistical analysis; and (4) showcasing the approach on a realistic IoT use‑case, thereby underscoring practical relevance.
In conclusion, distributed EE with local genotype exchange enables scalable, online adaptation for large‑scale networks, offering faster convergence and higher final fitness than centralized or non‑communicative methods. Future work is suggested on asynchronous communication, bandwidth and energy constraints, multi‑objective extensions, and hardware‑level validation.
Comments & Academic Discussion
Loading comments...
Leave a Comment