Data-Driven 3D Placement of UAV Base Stations for Arbitrarily Distributed Crowds
In this paper, we consider an Unmanned Aerial Vehicle (UAV)-assisted cellular system which consists of multiple UAV base stations (BSs) cooperating the terrestrial BSs. In such a heterogeneous network, for cellular operators, the problem is how to determine the appropriate number, locations, and altitudes of UAV-BSs to improve the system sumrate as well as satisfy the demands of arbitrarily flash crowds on data rates. We propose a data-driven 3D placement of UAV-BSs for providing an effective placement result with a feasible computational cost. The proposed algorithm searches for the appropriate number, location, coverage, and altitude of each UAV-BS in the serving area with the maximized system sumrate in polynomial time so as to guarantee the minimum data rate requirement of UE. The simulation results show that the proposed approach can improve system sumrate in comparison with the case without UAV-BSs.
💡 Research Summary
The paper addresses the challenge of providing temporary, high‑capacity cellular service during sudden, large‑scale gatherings (flash crowds) by deploying unmanned aerial vehicle base stations (UAV‑BSs) in conjunction with a terrestrial base station (GBS). Existing works either assume fixed UAV altitudes and coverage or rely on idealized user distributions (uniform, Gaussian, Poisson). In contrast, this study proposes a data‑driven three‑dimensional placement algorithm that directly uses the actual spatial distribution of user equipment (UE) to determine the optimal number, horizontal locations, altitudes, and coverage radii of UAV‑BSs, while guaranteeing a minimum per‑user data‑rate.
The system model consists of a single GBS and up to K UAV‑BSs that can move freely in 3‑D space. Downlink transmissions are considered; each UE is served by either the GBS or one UAV‑BS at any time. The GBS‑to‑UAV backhaul operates on a dedicated mmWave band and is modeled with free‑space path loss. The UAV‑to‑UE air‑to‑ground (ATG) channel follows the widely used LoS/NLoS probabilistic model, where the probability of line‑of‑sight depends on UAV altitude, horizontal distance, and environment‑specific parameters a and b. Path loss for LoS and NLoS links includes additional losses η_LoS and η_NLoS. SINR for a UE associated with a UAV‑BS incorporates interference from the GBS and from other UAV‑BSs whose coverage overlaps the UE. Data rates are derived from Shannon’s capacity formula, and a SINR threshold γ_th determines whether a UE can be associated with a particular BS.
The optimization problem (P1) seeks to minimize the number of deployed UAV‑BSs (k) while maximizing the total downlink sum‑rate, subject to: (i) altitude limits (h_min ≤ h_j ≤ h_max); (ii) a height‑dependent maximum coverage radius r_max(h_j); (iii) per‑UE minimum data‑rate c_min; (iv) backhaul capacity constraints for each UAV‑BS; (v) overall GBS capacity constraint; and (vi) exclusive association (each UE connects to exactly one BS). Indicator variables δ_i,j and δ_i,G capture whether the SINR exceeds the threshold.
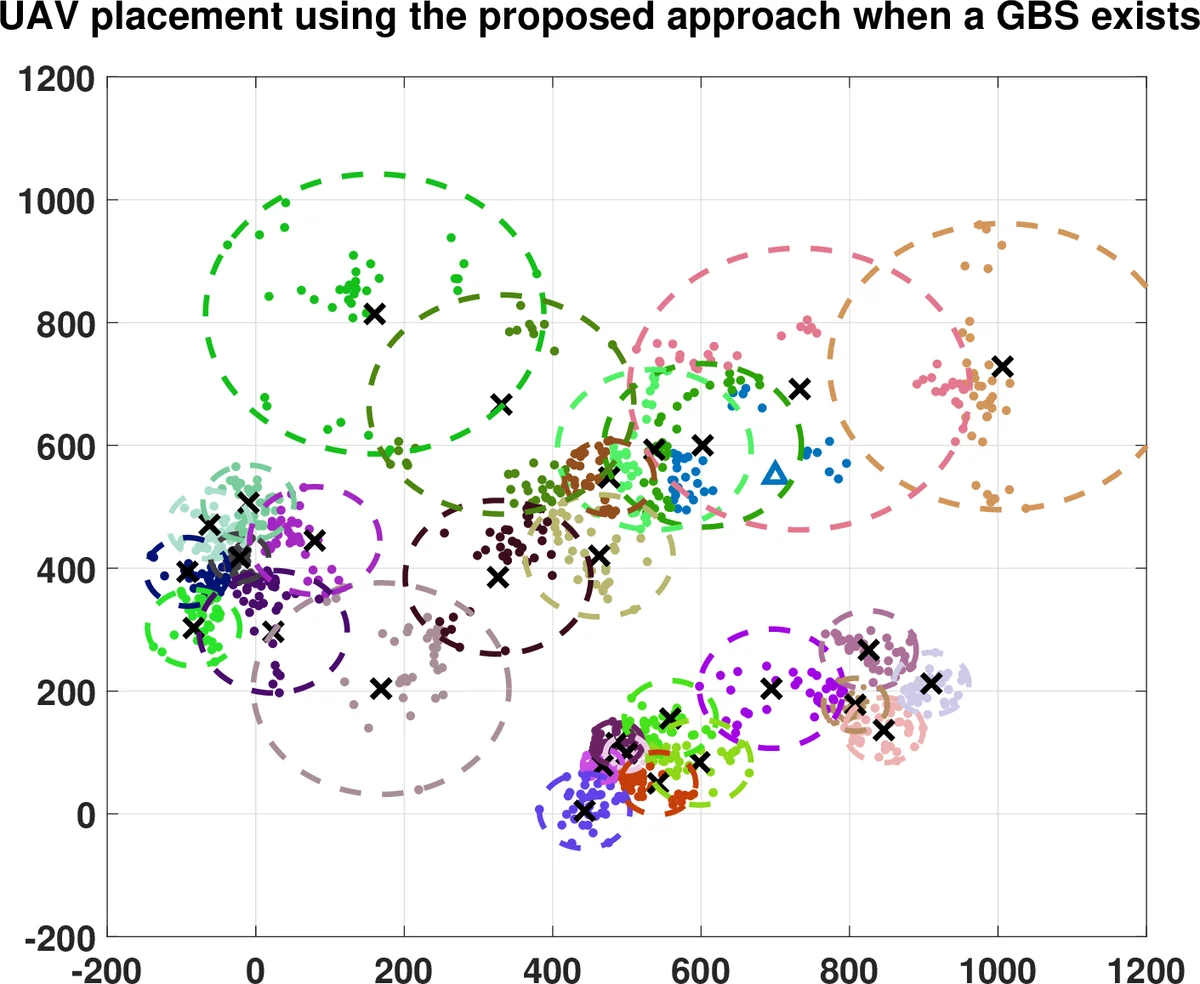
The proposed algorithm proceeds in three main phases. First, it pre‑computes the received power and distances from the GBS to all UEs. Second, it clusters the UE locations (e.g., using K‑means) to identify high‑density hotspots and generates a list of candidate UAV positions. For each candidate, an initial altitude and coverage radius are assigned based on the r_max(h) relationship. Third, an iterative refinement adjusts UAV altitudes, coverage radii, and UE‑UAV associations to satisfy SINR and data‑rate constraints while checking the backhaul limit. The algorithm dynamically adds or removes UAV‑BSs to balance load, thereby achieving a near‑optimal sum‑rate with polynomial time complexity, suitable for real‑time network management.
Simulation results use randomly generated UE sets (N = 200–500) and a single GBS, with K up to 10 UAV‑BSs. Performance metrics include total sum‑rate, average UE data‑rate, the proportion of UEs meeting c_min, and the number of UAV‑BSs deployed. Compared with a baseline without UAV‑BSs, the proposed scheme raises the sum‑rate by roughly 30‑50 % and dramatically improves the minimum‑rate satisfaction, especially in dense clusters where the success ratio exceeds 95 %. The benefit saturates as more UAV‑BSs are added because backhaul capacity and inter‑UAV interference become limiting factors.
The authors acknowledge several limitations: (1) UAV energy consumption and flight‑time constraints are not modeled, so operational cost is not quantified; (2) the study assumes a single GBS and static UE positions, leaving multi‑GBS coordination and mobility for future work; (3) channel model parameters are fixed, whereas real environments may cause significant variation. Future research directions include incorporating UAV battery models, extending the framework to multi‑cell scenarios with spectrum sharing, and developing online learning‑based placement that adapts to dynamic traffic patterns.
In summary, this paper contributes a practical, data‑driven 3‑D UAV‑BS placement methodology that jointly optimizes UAV count, location, altitude, and coverage to maximize system sum‑rate while respecting realistic constraints, offering a promising solution for 5G‑and‑beyond networks tasked with serving unpredictable flash‑crowd events.
Comments & Academic Discussion
Loading comments...
Leave a Comment