Anytime Heuristic for Weighted Matching Through Altruism-Inspired Behavior
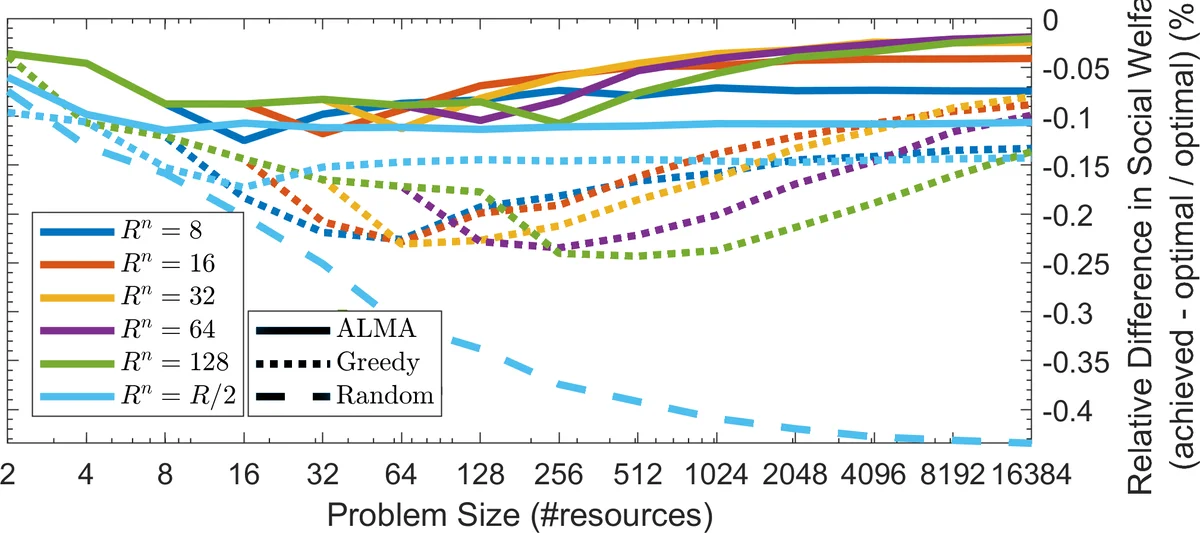
We present a novel anytime heuristic (ALMA), inspired by the human principle of altruism, for solving the assignment problem. ALMA is decentralized, completely uncoupled, and requires no communication between the participants. We prove an upper bound on the convergence speed that is polynomial in the desired number of resources and competing agents per resource; crucially, in the realistic case where the aforementioned quantities are bounded independently of the total number of agents/resources, the convergence time remains constant as the total problem size increases. We have evaluated ALMA under three test cases: (i) an anti-coordination scenario where agents with similar preferences compete over the same set of actions, (ii) a resource allocation scenario in an urban environment, under a constant-time constraint, and finally, (iii) an on-line matching scenario using real passenger-taxi data. In all of the cases, ALMA was able to reach high social welfare, while being orders of magnitude faster than the centralized, optimal algorithm. The latter allows our algorithm to scale to realistic scenarios with hundreds of thousands of agents, e.g., vehicle coordination in urban environments.
💡 Research Summary
The paper introduces ALMA (Altruistic Matching Heuristic), a novel anytime algorithm for solving the classic assignment problem in a fully decentralized, communication‑free manner. Inspired by human altruism, each agent only knows its own utility for a limited subset of resources and receives a one‑bit feedback (occupied/free) from the environment. Agents maintain a simple state: either they are trying to acquire a specific resource (A_r) or they are yielding (Y). When an agent attempts a resource and a collision occurs, it backs off with a probability that depends on the utility loss it would incur by switching to its next‑best alternative. This loss‑based back‑off probability is computed via a monotonically decreasing function (the authors experiment with a linear function and a logistic function). If an agent is yielding, it monitors the next resource in its preference order; if that resource is free, it immediately switches to acquisition mode.
The theoretical contribution is a convergence analysis that shows, under the assumption that each agent backs off with a constant probability p, the expected number of steps until a complete matching is reached is
O\
Comments & Academic Discussion
Loading comments...
Leave a Comment