Fallback Strategies in Operation Control of Microgrids with Communication Failures
This paper proposes a model predictive control (MPC)-based energy management system to address communication failures in an islanded microgrid (MG). The energy management system relies on a communication network to monitor and control power generation in the units. A communication failure to a unit inhibits the ability of the MPC to change the power of the unit. However, this unit is electrically connected to the network and ignoring this aspect could have adverse effect in the operation of the microgrid. Therefore, this paper considers an MPC design that includes the electrical connectivity of the unit during communication failures. This paper also highlights the benefit of including the lower layer control behaviour of the MG to withstand communication failures. The proposed approaches are validated with a case study.
💡 Research Summary
The paper addresses a critical vulnerability in islanded microgrids (MGs): the reliance of the energy management system (EMS) on a two‑way communication network to monitor and control distributed units (DUs) such as renewable generators, storage devices, and thermal generators. While many studies treat a loss of communication (CF) as a reason to either disconnect the affected unit or to force it to operate at a predefined default power, the authors recognize that the physical electrical connection often remains intact. Ignoring this fact can jeopardize power balance, especially when the affected unit is a battery whose state‑of‑charge (SOC) is crucial for economic operation and for absorbing renewable fluctuations.
The authors propose a model predictive control (MPC) framework that explicitly incorporates (i) the binary communication status ζ for each unit, (ii) the local low‑level controllers that act on frequency deviations (represented by the term χ·ρ), and (iii) an online estimation of the SOC of a storage unit when its communication link fails. The “com” function (Equation 1) blends the MPC‑generated set‑point u with a default power d according to the current ζ, while the local controller contribution χ·ρ remains active regardless of ζ. Consequently, even a unit with ζ = 0 can still influence the power balance through its local controller.
The system model includes detailed constraints: power balance (3), unit‑specific power limits (4a‑4c), SOC bounds (4d), storage dynamics with efficiency‑dependent charging/discharging (4e‑4f), and network line limits (4g). The cost function aggregates quadratic fuel cost and switching penalties for thermal units (5a), quadratic penalties for high charging/discharging rates and SOC violations for storage (5b), and a negative incentive for renewable utilization (5c). The overall objective (5d) is minimized over a prediction horizon h.
In the baseline certainty‑equivalence MPC (Problem 1), the future communication status is assumed constant, and the local control term ρ is forced to zero, which neglects the ability of local controllers to compensate for disturbances during a CF. Moreover, when a CF occurs on a storage unit, the EMS loses direct access to the SOC, making it impossible to enforce SOC constraints.
To overcome these limitations, the authors introduce a novel estimation scheme. By comparing the forecasted renewable and load values with their actual realizations, they compute a corrective term ρ(k) (Equation 8a) that restores power balance. Using the known default power d_s,i(k) and the locally generated correction χ_s,i ρ(k), they reconstruct the actual battery power p_s,i(k) (8b) and update an estimated SOC (\hat{x}_{s,i}(k+1)) via the storage dynamics (8c). This estimated SOC is then fed back into the MPC as a constraint, allowing the optimizer to respect SOC limits even without direct communication.
The revised MPC therefore includes the local control dynamics, the estimated SOC, and the possibility that ζ may be zero for some units. The optimization remains a quadratic program with linear constraints, preserving computational tractability for real‑time operation.
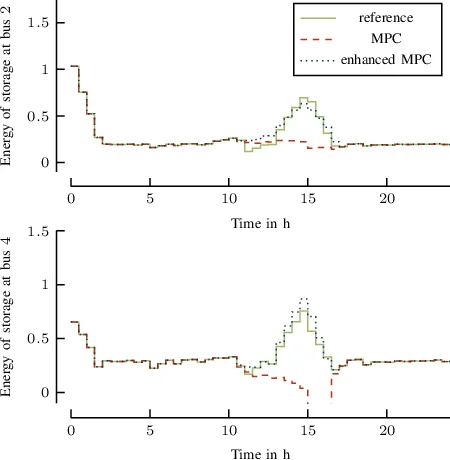
A case study on a representative islanded MG demonstrates the benefits. When a communication outage hits a battery, the conventional MPC (using only default power) leads to SOC drift beyond allowable limits, increased battery wear, and higher overall operating cost. In contrast, the proposed fallback strategy keeps the SOC within bounds, leverages the local controller to assist frequency regulation, and reduces total cost by avoiding unnecessary diesel generator start‑ups and by better exploiting renewable generation. The results highlight that accounting for electrical connectivity and local control during CFs can substantially improve both reliability and economics.
In conclusion, the paper makes three key contributions: (1) a clear distinction between communication failures and electrical disconnections, (2) integration of hierarchical (local) control behavior into the MPC formulation, and (3) an online SOC estimation method that enables safe operation of storage units under communication loss. The approach is readily extensible to multiple simultaneous CFs, more detailed network loss models, and stochastic MPC formulations that incorporate forecast uncertainty. Future work may also explore distributed MPC architectures and the inclusion of communication quality metrics such as latency and packet loss, further enhancing resilience of microgrids in real‑world deployments.
Comments & Academic Discussion
Loading comments...
Leave a Comment