Geometric Capsule Autoencoders for 3D Point Clouds
We propose a method to learn object representations from 3D point clouds using bundles of geometrically interpretable hidden units, which we call geometric capsules. Each geometric capsule represents a visual entity, such as an object or a part, and …
Authors: Nitish Srivastava, Hanlin Goh, Ruslan Salakhutdinov
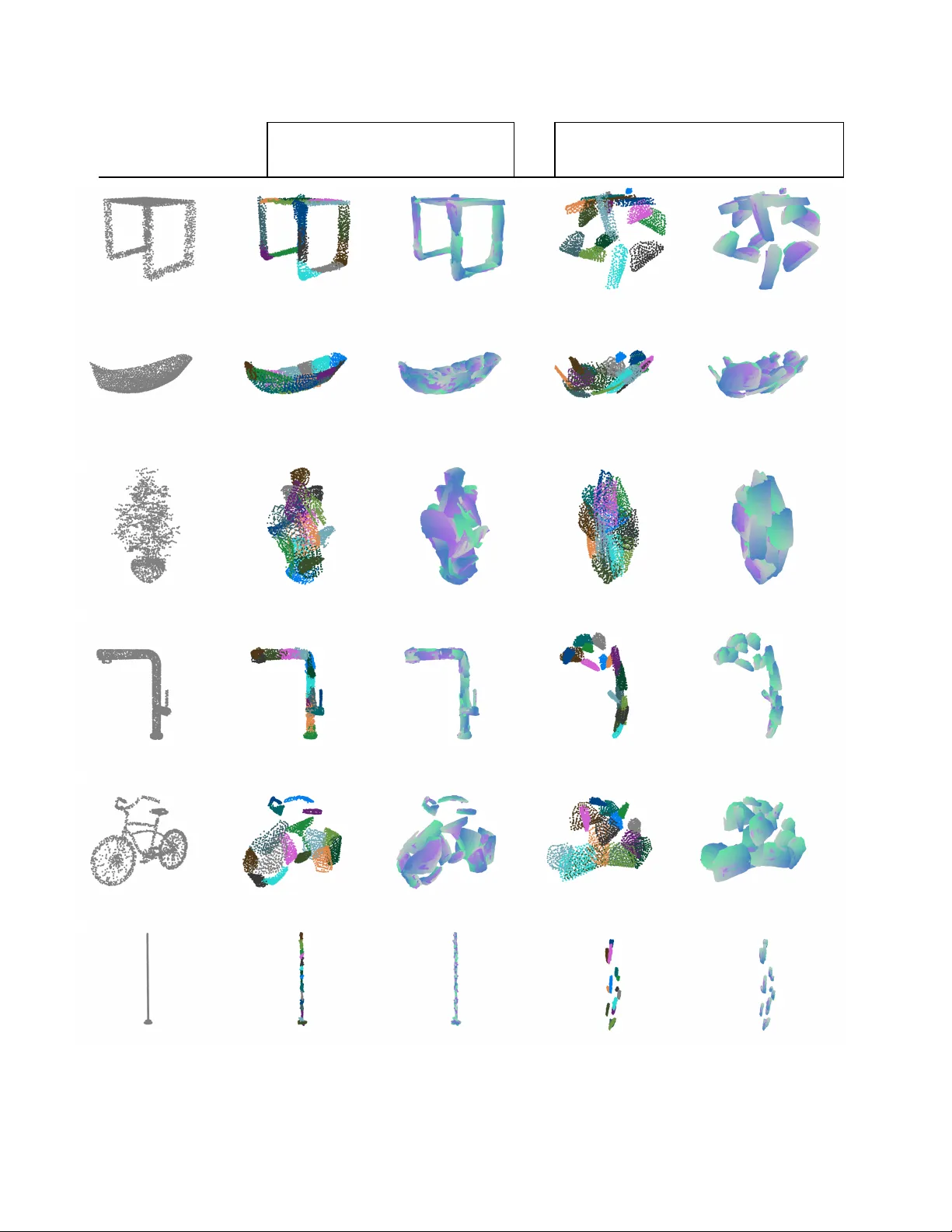
Geometric Capsule Autoencoders for 3D Point Clouds Nitish Sri v astav a, Hanlin Goh, Ruslan Salakhutdino v Apple Inc. { nitish srivastava,hanlin,rsalakhutdinov } @apple.com Abstract W e propose a method to learn object representations from 3D point clouds using bundles of geometrically inter - pretable hidden units, which we call “geometric capsules”. Each geometric capsule represents a visual entity , such as an object or a part, and consists of two components: a pose and a feature. The pose encodes “where” the entity is, while the feature encodes “what” it is. W e use these cap- sules to construct a Geometric Capsule Autoencoder that learns to group 3D points into parts (small local surfaces), and these parts into the whole object, in an unsupervised manner . Our novel Multi-V ie w Agreement voting mecha- nism is used to discover an object’ s canonical pose and its pose-in v ariant feature vector . Using the ShapeNet and Mod- elNet40 datasets, we analyze the properties of the learned representations and show the benefits of ha ving multiple votes agree. W e perform alignment and retriev al of arbi- trarily rotated objects – tasks that ev aluate our model’ s ob- ject identification and canonical pose recovery capabilities – and obtained insightful results. 1 Intr oduction Capsule networks structure hidden units into groups, called capsules [ 7 ]. Each capsule represents a single visual entity and its hidden units collectiv ely encode all the information regarding the entity in one place. For e xample, the length of the hidden unit v ector can represent the e xistence of the en- tity and its direction can represent the entity’ s instantiation parameters (“pose”) [ 16 ]. Capsule networks combine the expressi ve po wer of distributed representations (used within each capsule) with the interpretability of having one com- putational entity per real-world entity . These capsules can be organized in a hierarchical man- ner to encode a visual scene. Low-le v el capsules can be used to represent lo w-le vel visual entities (such as edges or object parts), while high-lev el capsules may represent entire objects. A routing algorithm [ 16 , 8 ] is used to discov er the connections between the lo w-lev el and high-level capsules. This makes it easy to introduce priors, such as “one part can only belong to one object” by enforcing a mutually ex- Ap p l e C on fi d en ti a l –I n t er n a l U s e On l y Object Capsule pose (translation, quat ernion) pose invariant f eature Part Capsules 3D Point Cloud … point-to-part routing Figure 1: Model Overview . Geometric Capsules are used to rep- resent parts, as well as the whole object. Each capsule consists of two components: pose and feature. Points are routed to parts, as shown abov e. The object capsule is computed from the part capsules. clusiv e routing of a part capsule to a single object capsule. These priors w ould be hard to enforce for visual representa- tions that do not have such explicit grouping, such as a layer of hidden units in a con v olutional neural network (CNN). W e propose a geometric capsule design, in which every visual entity (i.e. part or whole object) is encoded using two components: a pose and a feature, as shown in Figure 1 . These encode “where” the object is and “what” the object is respectiv ely . An entity’ s pose is e xplicitly represented in a geometrically interpretable manner , as a 6 degree-of- freedom (DOF) coordinate transformation, which encodes the canonical pose of that entity with respect to the viewer . The feature is represented as a real-v alued vector which en- codes all non-pose attributes of the object (such as its shape) and is meant to be in v ariant to the object’ s pose with respect to the viewer . A Geometric Capsule Autoencoder is con- structed to group 3D points into parts (small local surf aces), and these parts into the whole object in a completely unsu- pervised manner . W e introduce a novel Multi-V iew Agree- ment voting mechanism within the autoencoder, which en- ables the concurrent discov ery of an object’ s canonical pose and its pose-in v ariant feature vector . 1 2 Related W ork Hinton et al. [ 7 ] introduced the notion of capsules with T ransforming Autoencoders where the autoencoder was tasked with explicitly computing the pose of the input data, along with a pose-inv ariant feature. Interest in capsule net- works was revi v ed by Sabour et al. [ 16 ] who proposed a dynamic routing algorithm for capsules. Since then, se v- eral variants of capsule design and routing algorithms have been proposed for various domains, such as handwritten digits [ 16 , 8 , 11 ], images [ 8 , 11 ] and 3D point clouds [ 22 , 1 ]. Modeling geometric pose. In [ 16 ], a capsule’ s existence and pose are encoded by its hidden unit vector magnitude and direction respectiv ely . The pose v ector models a space of variability and is not geometrically interpretable, espe- cially for higher-le v el capsules. [ 8 ] used 4 × 4 matrices to mediate capsule interactions but did not constrain them to represent geometrically interpretable transforms. [ 11 ] ex- plicitly represents 2D af fine transforms using 3 × 3 transfor- mation matrices. Ho we ver , instead of extending their ap- proach to a 3D setting, we use quaternions to model pose because the y are easily constrained to represent only 3D ro- tations, compared to 4 × 4 matrices. [ 1 ] also uses quaternions to encode the pose of capsules. V oting and Agreement An important aspect of capsule network design is ho w to infer the state of a parent capsule. One approach is to have each part vote for the state of the parent by transforming its own state via a learned weight matrix [ 16 , 8 ]. The votes are aggregated to form a consen- sus, which determines the state of the parent capsule. Parts that agree with the consensus are then assigned to that par- ent. This works in the setting where discretely man y parent objects are being considered for existence. In that case, each part casts a vote per object and can form a reasonably good vote since the vote is conditioned on the index of the ob- ject. Ho we ver , if we want to represent generic objects (i.e. objects are v alue-coded instead of place-coded), it seems intuitiv ely unreasonable to expect a part to come up with a good vote for its parent object, since the same part can belong to multiple objects. While each part constrains the space of possible objects, this constraint is difficult to spec- ify as a single vote. A different way to do this is to simply feed all the parts collecti vely into a Set Transformer [ 12 ] to output the parent’ s state. Since the Transformer has si- multaneous access to all the parts, it can compute the par- ent’ s feature representation directly without explicit voting or agreement among the parts. [ 11 ] follo ws this approach in their encoder but during decoder a separate decoder network per object index is used, making the feature representation place-coded. In this work, we sho w how a v alue-coded rep- resentation can be learned using Multi-V ie w Agreement, where instead of asking parts to agree, we ask viewpoints to agree on object pose and feature. Multi-view consistency . The idea of using multiple views to come up with a coherent understanding of an object has been studied extensi vely [ 20 , 17 , 18 , 13 , 4 , 5 , 23 , 24 , 6 , 9 ]. Most rele vant to our work is the w ork of T ulsiani et al. [ 17 ] who proposed to learn the 3D shape and canonical pose of objects using pairs of 2D image views to generate a self- supervised “consistency” learning signal. In their model, CNNs are used to output the shape and pose of the input object, starting from image inputs. Our model also outputs the shape and pose of the object, but in a interpretable way , creating a parsing of the object into parts, each with their own shape and pose. Capsules for 3D point clouds. The 3D Point Capsule Network [ 22 ] sho wed the possibility of e xtracting semanti- cally meaningful parts from 3D point clouds using capsule- based representations. Ho wev er , the model only learns part- lev el capsules and does not model an entire object as a sin- gle capsule. Also, pose and feature components are not dis- entangled, and the feature identity is place-coded. Recently , Quaternion Equiv ariant Capsule Networks [ 1 ] were pro- posed to learn a pose-equiv ariant representation of objects. The model builds a hierarchy of Local Reference Frames, where each frame is modeled as a quaternion. Howe v er , the model is trained using supervision from class labels and relativ e poses. In our model, we adopt an entirely unsuper - vised approach to learn entity representations from 3D point clouds. The model decouples the representation of pose and feature, as a translation-vector and a quaternion-vector tu- ple, and a value-coded real-v alued v ector , respecti vely . 3 Geometric Capsule A utoencoder W e now describe the Geometric Capsule Autoencoder , which b uilds hierarchical object representations from Geo- metric Capsules. W e sho w ho w Multi-V iew Agreement can be used to learn a capsule’ s pose and feature components. 3.1 Geometric Capsules Each geometric capsule c = ( c q , c f ) describes a visual en- tity with two components: pose c q and feature c f . The pose c q represents the transformation between a global frame and the entity’ s canonical frame. Each c q = ( t , r ) consists of a translation t ∈ R 3 and a quaternion that represents rotation r ∈ R 4 , || r || = 1 , r 0 ≥ 0 . Therefore c q is a 7-D vector (b ut with only 6-DOF) that encodes “where” the visual entity is with respect to a global frame. The feature c f ∈ R D repre- sents the identity of the entity . It defines “what” this entity is and encodes all attrib utes of the entity other than its pose. Geometric capsules may be observ ed from different viewpoints. A vie wpoint z is encoded by a coordinate trans- formation (using a 7-D representation similar to a capsule’ s 2 A p p l e C on f i d e n t i a l –I n t e r n a l U s e O n l y viewpoint viewpoint percepts should be the same percept percept reconstruct F ( O | z 2 ) AAAyLXiclVvbctvIEdXmulGyyW7ymBdUZNfupmSVZbuSzdvqfqMk6n4xvS4QbIKwcDNmCEpmmK/Ia/IL+Zo8pCqV1/xGemYw6B4Q8lZUZQtzzqCBmTk9fQhC/TyOhHz+/F+f/OCHP/rxT3766c8Wf/6Lz375q8+/+PWlyMZFABdBFmfFdd8XEEcpXMhIxnCdF+An/Riu+ncbir8qoRBRlp7LhxzeJH6YRsMo8CVCt9tfHf+5V354++Lrt58vPV95rn+8+YPV6mBpofrpvv1i9bPeIAvGCaQyiH0hXq8+z+WbqV/IKIhhttgbC8j94M4P4TUepn4C4s1U3/LMe4rIwBtmBf5LpadRfsbUT4R4SPrYM/HlSDQ5BbZxr8dy+M2baZTmYwlpYC40HMeezDw1fm8QFRDI+AEP/KCI8F69YOQXfiBxlpyr9BNnDFMZ4QBmi4tP1Y93tHXlHa6d73qbW9t7R3vne8dHZ56mFtvudRl/q5GKZRV28al36Bd3nsBbwWUQXjb0Aj83x2pSChhCUURpqO57EJWRsN2GUTguAO80hUmQJYmfDqY9BGMYytl02oPE+6qDx1/PZnN9AlwqKGyvDd1q61dE4agOdqoabb1klts+51ne1qOfSZklttO6bs31q8bt227+Yz36tkf/sR6B7RE81mNgewxUD1yGXRxdrEbo+R72V7qAIebSwMO5SdwYeKzA2evVNxilP/SWVlUQjLKtF8WsGqoOlr04m0DxLMDMXFnsYUg9rTBcWp2aBfxLD1tTHaDtdLzdSPrxireNYhASc0qtvVArhryJuG0jbjcjalpOMnvNpRfVVYVnO3k4oqrxwp7xfuwP6JSll0uv5k5brs+xRy95qFd6OGdG1R+dDlS+ufkqBZz5aAlgJ8ScfWbPPms5+9SepXN+ktVZtlJPjLm60DNT5+AjU9MMOCoAmiFZvKWX8xFp1ljsl/Ox/dQDXAR1csuUwXszZtvl8UE7ccZ5DoWn4pgwW1WYrbYwa17hT2jeG8GePXvml1k08MZCbU3R0MszISKsNSZ0HvuYOlX8x+9Obbg5ZlLLGBVjTq/6/N+DrAJt1IE2vjcQjjkNQe/Bpq8wMTRc3xFKxdI21LNnj8oE786PwwwLzChpGSdy5u7qTh8dKAs1N9I1G2qtJZQVvL0eDqKO9fHN4Nw5ae17T5qb1Bw3rWrkTH0KNberjj62KOb8pnq79fld93w70voCeNfq+NEbrgQHUazEGqsD3NCxgzqq4g3jLCs0rY8Mrw+rDkj1k+lqs9rIAhNhNu2pyh/48XSz2aH042jAO7w1x0UyNdRsLiQI2X6CZmb1iCAXqsblIoqztKpPpxgiS7zSLyIfs9XqG6Q/VZHvZZoVCUZ90kPoycxOZ9GgfWL6LtMnJnCZgJiBywyIAZcBYoYuMyQmdJmQmJHLjIiJXCYi5p3LvCPmzmXuiIldJp5pGReJFwnMWHThgwe12ZkVXPbejYX0Bln6pfSUF0Y5Pqidx1kYL6lip27slK6auUxGTO4yOTHvXeY9MYXLFMQIlxHESJeRxIxdZkxM6TIlMROXmRBz7zL3xDy4zAMxH1zmw8zYPJsAWJmzensvqySZmlTqD1na1PctRyZLbA/dZjzjONwnmOVGGRDMEqMcEMyyogSCWUqUQ4JZPpQhwSwZyhHBLBPKMcEsDcp3BLMcKO8IZglQxgTHDE4IThjMJprPcEYwE3OZE8yUXL4nmMm4LAhmGi4FwYIvKsGyfU64dEuCmW7LCcFMtOU9wUyx5QPBTK7lB4KtVrdiUJ+p9ae9okW3YETXui+DUV7rzgxGfq17MxgNtu7OYITYuj+DUWPrDg1Gkq17NBhdtu7SyD26T4NRaOtODUamrXs1GK02d2vLJS6XcO7RnRiMdFv3YjD6bd2NwYi4dT8Go+TWHRmMnFv3ZDCabt2VwQi7dV8Go+7WnRmMxFv3ZjA6b92dwYi9dX8Go/jHd2jMhSIKaoeSrFF+rFHaJOsErzN4g+ANBm8SvMngLYK3GLxN8DaDdwjeYfAuwbsM3iN4j8H7BO8z+IDgAwZ3CO4w+JDgQwYfEXzE4GOCjxncJbjL4BOCTxh8SvApg88IPmPwOcHnDL4g+ILBlwRfMviK4CsGXxN8zeAbgm8YfEvw7ePbqys6MKpjGl1j+tXSY9w65zZcboNzmy63ybktl9vi3LbLbXNux+V2OLfrcruc23O5Pc7tu9w+5w5c7oBzHZfrcO7Q5Q45d+RyR5w7drljznVdrsu5E5c74dypy51y7szlzjh37nLnnLtwuQvOXbrcJeeuXO6Kc9cud825G5e74dyty1nZX3ILUX4A/TkCP7s+r88tsxSm9vOsxZKxgXoJFY1SRGHiV7g+JsraZUW5VrmsYIb0DUIWRRsURMiYaFuCCNmRsrpJMiHagiBC1kMbD0TIcGi7gQjZDG0yECFzoa0FImQptKFAhIyEthGIxGyKDEKmQVsGRFI2tQYhg6DtASJkC7QpQITMgLYCiBRs5g0i2IQbhMp9Wa0YW6/SIFTadWFHhAq6LueIUBnXRRwRKt66dCPSZlRdh1r6cT5S661/1+Is+5U4tC4sSJ/C6KFFRcV+0h+oM8wBEVkCocL1b4K1WpVSLYABEcH/CbLirYRrYSvcSrT1QKZTfv9TJVbbQrEG1EKhDtigpkqgtoUCHVILxRlSC4U5ohbeLrtXFOQ7aqEY79jcTJUI65FPlQBtCyeTzSKKL2NTMlWisy0U3XtqoeAKNlNTJbR6gqZKZLaFE82mGQVWUgvFNaEWCuueWiiqB2qhoD7Mqq/DsATfG1yXX9QZlV1ddBGhYqtLLSJUYnWBRYQKqy6riFA51cUUESqiuoQiQqVTF05EqGDqcokIlUldJBGh4qhLIyJUEnVBRIQKoS6DiFD508UPESp6uuQhQqVOFzpEqMDp8oYIlTVd1BChYqZLGSJUwnQBQ4QKly5biFC50sUKESpSukQhQqVJFyZEqCDpcoQIlSFdhBC5ZStIdaHPy0LSHVUbcQ+P2OzZ1FdMp0r/enCsAJ3ZAoQqOodUqO+RNyGI/QJQVKM1tQPhFY0PFMNIPUWFNMgGURpiMH8cK0QM6+NkNhXqAfAZyMcC9LN48H1h+vczTMLmQ9xU6K8PTUmt4ukH2NXQpLGeqWDql+sWI/3LDYtRBshNi1EOyC2LURbIbYtRHsgdi1EmyF2LUS7IPYtRNsh9i1E+yAOLUUbIjsUoJ+ShxSgr5JHFKC/kscUoM2TXYpQb8sRilB3y1GKUH/LMYpQh8txilCPywmKUJfLSYpQn8spilCny2mKUK/LGYpQt8tZixqyhkHcKPx8ZNrQfgQPnk0i4zmDSRbjBYJJGuMlgUke4xWASSLjNYNJIuMNgkkm4y2BSSrjHYBJLuM9g0kt4wGCSTNhhMKkmPGQwCSc8YjBpJzxmMMkn7DKYFBSeMJhEFJ4ymHQUnjGYpBSeM5jUFF4wmAQVXjKYNBVeMZhkFV4zmJQV3jCYxBXeMth+GMCtrbJqon7A0mfiEuuEkrbEBqEkLbFJqFbWU29Tf8kxFuD5ngDp4aVjGHhby14fAl/hchQJb5KN4wFC2AJP6K9E0EuOC0+9+JPFGEi9CgP3OXpL/T2v/bZ9m65I6hQ7hJI4xS6hpE2xRyhJU+wTSsoUB4SSMEWHUNKlOCSUZCmOCCVVimNCSZSiSyhpUpwQSpIUp4SSIsUZoSRIcU4o6VFcEEpyFJeEkhrFFaEkRnFNKGlR3BBKUhS3hNZPY1L0faA/QvjmOUxlAoEcQMc1/8oerlELpbpOLZToBrVQmpvUws1ui1ooom1qoXh2qIWi2aUWimWPWiiSfWqhOA6ohaLoUAvFcEgtFMERtXDxj6mFi96lFi72CbVwkU+phYt7Ri1c1HNq4WJeUAsX8ZJauHhX1MJFu6YWLtYNtXCRbtn1KqdVuSy1ZMCXTBrHhVuKyl/9Lh8msUGXvUkkR9lYemh3vAmWtBwK1xABOSLHDVWXl7UGdMc5IwjaLkHDL4E2TNBwTKAtEzQ8E2jTBA3XBNo2QcM3gTZO0HBOoK0TNLwTaPMEDfcE2j5Bwz+BNlDQcFCgLRQ0PBRoEwUNFwXaRkHDR4E2UtBwUqCtFDS8FGgzBQ03BdpOQcNPgTZU0HBUoC0VNDwVaFMFDVcF2lZBw1eBNlbQcFagrRU0vBVocwUNdwXaXkHDX4E2WMAcFn5SwJIjizF443QARfyg3mca+NL3QkihwGqj2pFApffHqvS4ss1V19k0fzvtFclUN3ThU1EhyaMiwpLnnF+/Vth/0OVOvyGiLoL1sRHbvjwy8iV+Uncv4fTs8p7dWdvNJNkA4o8NRHeoR2Jac9epOnU/1imXUTyAqmdPN+q7r8/AbUJmwcgX6rVbfywz/QkKCucOG++25qZPfY/VKfM3MACnn2m29CuQwE3H9jNN1EKgn6G5nWM/j/0AZvXLNp0KmHlPverYnV73/K1ZXfG2mjfSEex9nk6TPZ3x2t7YNZOczXGDjIuZfe7mEgWEs/pJWpMKJI1RtaJhBEUztMiGMvHvqacFmv2wWGT6/SbzkG0+Sh6P1eg/qCcBLnvQmfGXmw46cwt46Rd0B6rRjC/xl1/g2hcZ63k2twAbWUm0aiiBXmXxsPAT9UBqNMkKNKjCfxDek853L56oF3v0K+vj1LygKnJcf6FfLHvSgzhmfewD0afeOhZATPlU/feA+Q6JesFNuWATlPVWb5dm41DXTG2KIwnLOrzIvEEGKtwkuotyGET+SuPt5KxIYvVcfzbtfPd81kJmKShutY2TE33eizYuV0zewmgtdL7rRelQPjRTJ/cL9XAYtw1fJcsZ4F4r/BC8KPXSrDL0Eu5XvI1RJtT0ZMoABiNvEz/7pvCl8PpZdrey6DzOOc7V7pwVv0eNF6G+AfzdW1ZHH+uo9knTEY/aQ2q1Yjf9/yM9zlFQ5+rlvxhkz+9jnsXZpF+Af7eo/4DiT+rnD/WfS8wfXL5YWX258urk1dK331R/SvHpwm8Xfrfw1cLqwh8Xvl3YXeguXCwEC+nCXxf+tvD31X+s/nP136v/MV1/8El1zm8WnJ/V//4P9p5qqA== F ( O | z 1 ) AAAyLXiclVvbctvIEdXmulGyyW7ymBdUZNfupmSVabuSzdvqfqPud5leFwg2QVi4GTMEJTPMV+Q1+YV8TR5SlcprfiM9Mxh0Dwh5K6qyhTln0MDMnJ4+BKF+HkdCPn/+r09+8MMf/fgnP/30Z4s//8Vnv/zV51/8+lJk4yKAiyCLs+K67wuIoxQuZCRjuM4L8JN+DFf9u3XFX5VQiChLz+VDDm8SP0yjYRT4EqHbra+O/twrP7ztfP3286XnK8/1jzd/0KkOlhaqn+O3X3Q+6w2yYJxAKoPYF+J153ku30z9QkZBDLPF3lhA7gd3fgiv8TD1ExBvpvqWZ95TRAbeMCvwXyo9jfIzpn4ixEPSx56JL0eiySmwjXs9lsNv3kyjNB9LSANzoeE49mTmqfF7g6iAQMYPeOAHRYT36gUjv/ADibPkXKWfOGOYyggHMFtcfKp+vMPNK+9g9XzH29jc2j3cPd89OjzzNLXYdq/L+FuNVCyrsItPvQO/uPME3goug/CyoRf4uTlWk1LAEIoiSkN134OojITtNozCcQF4pylMgixJ/HQw7SEYw1DOptMeJN5XXTz+ejab6xPgUkFhe63rVlu/IgpHdbBT1WjrJbPc9jnP8rYe/UzKLLGd1nRrrl81bt928x/r0bc9+o/1CGyP4LEeA9tjoHrgMuzg6GI1Qs/3sL/SBQwxlwYezk3ixsBjBc5ed95glP7QW+qoIBhlSy+KWTVUHSx7cTaB4lmAmbmy2MOQelphuNSZmgX8Sw9bUx2g7XS83Uj68Yq3hWIQEnNKrb1QK4a8ibhlI241I2paTjJ7zaUX1VWFZzt5OKKq8cKe8X7sD+iUpZdLr+ZOW67PsUcveahXejhnRtUfnQ5Uvrn5KgWc+WgJYCfEnH1mzz5rOfvUnqVzfpLVWbZST4y5utAzU+fgI1PTDDgqAJohWbyll/MRadZY7Jfzsf3UA1wEdXLLlMF7M2bb5fFBO3HGeQ6Fp+KYMJtVmM22MKte4U9o3hvBnj175pdZNPDGQm1N0dDLMyEirDUmdB77mDpV/MfvTm24OWZSyxgVY06v+vzfg6wCrdeB1r83EI45DUHvwaavMDE0XN8RSsXSNtSzZ4/KBO/Oj8MMC8woaRkncubu6k4fHSgLNTfSVRtqtSWUFby9Hg6ijvXxzeDcOWn1e0+am9QcN61q5Ex9CjW3q44+tijm/KZ6j+vzj93z7UjrC+Bdq+NHb7gSHESxEmusDnBDxw7qqIo3jLOs0LQ+Mrw+rDog1U+mnWa1kQUmwmzaU5U/8OPpRrND6cfRgHd4a46LZGqo2VxIELL9BM3M6hFBLlSNy0UUZ2lVn04xRJZ4pV9EPmar1TdIf6oi38s0KxKM+qSH0JOZnc6iQfvE9F2mT0zgMgExA5cZEAMuA8QMXWZITOgyITEjlxkRE7lMRMw7l3lHzJ3L3BETu0w80zIuEi8SmLHowgcParMzK7jsvRsL6Q2y9EvpKS+McnxQO4+zMF5SxU7d2CldNXOZjJjcZXJi3rvMe2IKlymIES4jiJEuI4kZu8yYmNJlSmImLjMh5t5l7ol5cJkHYj64zIeZsXk2AbAyZ/X2XlZJMjWp1B+ytKnvW45Mltgeus14xnG4TzDLjTIgmCVGOSCYZUUJBLOUKIcEs3woQ4JZMpQjglkmlGOCWRqU7whmOVDeEcwSoIwJjhmcEJwwmE00n+GMYCbmMieYKbl8TzCTcVkQzDRcCoIFX1SCZfuccOmWBDPdlhOCmWjLe4KZYssHgplcyw8EW61uxqA+U+tPe0WLbsGIrnVfBqO81p0ZjPxa92YwGmzdncEIsXV/BqPG1h0ajCRb92gwumzdpZF7dJ8Go9DWnRqMTFv3ajBabe7WlktcLuHcozsxGOm27sVg9Nu6G4MRcet+DEbJrTsyGDm37slgNN26K4MRduu+DEbdrTszGIm37s1gdN66O4MRe+v+DEbxj+/QmAtFFNQOJVml/FiltEnWCF5j8DrB6wzeIHiDwZsEbzJ4i+AtBm8TvM3gHYJ3GLxL8C6D9wjeY/A+wfsM7hLcZfABwQcMPiT4kMFHBB8x+JjgYwafEHzC4FOCTxl8RvAZg88JPmfwBcEXDL4k+JLBVwRfMfia4GsG3xB8w+Bbgm8f315d0YFRHdPoKtOvlh7j1ji37nLrnNtwuQ3ObbrcJue2XG6Lc9sut825HZfb4dyuy+1ybs/l9ji373L7nOu6XJdzBy53wLlDlzvk3JHLHXHu2OWOOXficiecO3W5U86dudwZ585d7pxzFy53wblLl7vk3JXLXXHu2uWuOXfjcjecu3U5K/tLbiHKD6A/R+Bn1+f1uWWWwtR+nrVYMjZQL6GiUYooTPwK18dEWbusKNcqlxXMkL5ByKJog4IIGRNtSxAhO1JWN0kmRFsQRMh6aOOBCBkObTcQIZuhTQYiZC60tUCELIU2FIiQkdA2ApGYTZFByDRoy4BIyqbWIGQQtD1AhGyBNgWIkBnQVgCRgs28QQSbcINQuS+rFWPrVRqESrsu7IhQQdflHBEq47qII0LFW5duRNqMqutQSz/OR2q99e9anGW/EofWhQXpUxg9tKio2E/6A3WGOSAiSyBUuP5NsFarUqoFMCAi+D9BVryVcC1shVuJth7IdMrvf6rEalso1oBaKNQBG9RUCdS2UKBDaqE4Q2qhMEfUwttl94qCfEctFOMdm5upEmE98qkSoG3hZLJZRPFlbEqmSnS2haJ7Ty0UXMFmaqqEVk/QVInMtnCi2TSjwEpqobgm1EJh3VMLRfVALRTUh1n1dRiW4HuD6/KLOqOyq4suIlRsdalFhEqsLrCIUGHVZRURKqe6mCJCRVSXUESodOrCiQgVTF0uEaEyqYskIlQcdWlEhEqiLoiIUCHUZRARKn+6+CFCRU+XPESo1OlChwgVOF3eEKGyposaIlTMdClDhEqYLmCIUOHSZQsRKle6WCFCRUqXKESoNOnChAgVJF2OEKEypIsQIrdsBaku9HlZSI5H1UbcwyM2ezb1FdOt0r8eHCtAZ7YAoYrOIRXqe+QNCGK/ABTVaFXtQHhF4wPFMFJPUSENskGUhhjMH8cKEcP6OJlNhXoAfAbysQD9LB58X5j+/QyTsPkQNxX660NTUqt4+gF2NTRprGcqmPrlmsVI/3LdYpQBcsNilANy02KUBXLLYpQHcttilAlyx2KUC3LXYpQNcs9ilA9y32KUEbJrMcoJeWAxygp5aDHKC3lkMcoMeWwxyg15YjHKDnlqMcoPeWYxyhB5bjHKEXlhMcoSeWkxyhN5ZTHKFHltMcoVeWMxyhZ5azFj1lDI24Wfjwwb2o/AgfNJJFxjMOkiXGcwSSPcYDCpI9xkMAkk3GIwaSTcZjDJJNxhMCkl3GUwiSXcYzDpJdxnMEkm7DKYVBMeMJiEEx4ymLQTHjGY5BMeM5gUFJ4wmEQUnjKYdBSeMZikFJ4zmNQUXjCYBBVeMpg0FV4xmGQVXjOYlBXeMJjEFd4y2H4YwK2tsmqifsDSZ+ISa4SStsQ6oSQtsUGoVtZTb0N/yTEW4PmeAOnhpWMYeJvLXh8CX+FyFAlvko3jAULYAk/or0TQS44LT734k8UYSL0KA/c5ekv9Pa/9tn2LrkjqFNuEkjjFDqGkTbFLKElT7BFKyhT7hJIwRZdQ0qU4IJRkKQ4JJVWKI0JJlOKYUNKkOCGUJClOCSVFijNCSZDinFDSo7gglOQoLgklNYorQkmM4ppQ0qK4IZSkKG4JrZ/GpOj7QH+E8M1zmMoEAjmArmv+lT1cpRZKdY1aKNF1aqE0N6iFm90mtVBEW9RC8WxTC0WzQy0Uyy61UCR71EJx7FMLRdGlForhgFoogkNq4eIfUQsX/ZhauNgn1MJFPqUWLu4ZtXBRz6mFi3lBLVzES2rh4l1RCxftmlq4WDfUwkW6ZdernFblstSSAV8yaRwXbikqf/W7fJjEBl32JpEcZWPpod3xJljScihcQwTkiBw3VF1e1hrQHeeMIGi7BA2/BNowQcMxgbZM0PBMoE0TNFwTaNsEDd8E2jhBwzmBtk7Q8E6gzRM03BNo+wQN/wTaQEHDQYG2UNDwUKBNFDRcFGgbBQ0fBdpIQcNJgbZS0PBSoM0UNNwUaDsFDT8F2lBBw1GBtlTQ8FSgTRU0XBVoWwUNXwXaWEHDWYG2VtDwVqDNFTTcFWh7BQ1/BdpgAXNY+EkBS44sxuCN0wEU8YN6n2ngS98LIYUCq41qRwKV3h+r0uPKNlddZ9P87bRXJFPd0IVPRYUkj4oIS55zfv1aYf9Blzv9hoi6CNbHRmz78sjIl/hJ3b2E0/OY9zyetd1Mkg0g/thAdId6JKY1d52q0/HHOuUyigdQ9ezpRn339Rm4TcgsGPlCvXbrj2WmP0FB4dxh493W3PSp77E6Zf4GBuD0M82WfgUSuOnYfqaJWgj0MzS3c+znsR/ArH7ZplsBM++pVx270+uevzmrK95m80a6gr3P022ypzNe2xu7ZpKzOW6QcTGzz91cooBwVj9Ja1KBpDGqVjSMoGiGFtlQJv499bRAsx8Wi0y/32Qess1HyeOxGv0H9STAZfe7M/5y0353bgEv/YLuQDWa8SX+8gtc+yJjPc/mFmA9K4lWDSXQqyweFn6iHkiNJlmBBlX4D8J70v3uxRP1Yo9+ZX2cmhdURY7rL/SLZU96EMesj30g+tRbwwKIKZ+q/x4w3yFRL7gpF2yCst7q7dJsHOqaqU1xJGFZhxeZN8hAhZtEd1EOg8hfabydnBVJrJ7rz6bd757PWsgsBcV12jg50ee9aONyxeQtjNZC97telA7lQzN1cr9QD4dx2/BVspwB7rXCD8GLUi/NKkMv4X7FWx9lQk1PpgxgMPI28LNvCl8Kr59ldyuLzuOco1ztzlnxe9R4EeobwN+9ZXX0sY5qnzQd8ag9pFYrdtP/P9LjHAV1rl7+i0H2/D7mWZxN+gX4d4v6Dyj+pH7+UP+5xPzB5YuVzsuVVyevlr79pvpTik8Xfrvwu4WvFjoLf1z4dmFn4XjhYiFYSBf+uvC3hb93/tH5Z+ffnf+Yrj/4pDrnNwvOT+e//wPE3Wqn z 1 AAAyKHiclVvbctvIEeXmulGyyW7ymBdUZNduUrLKsreSzdvqLlmUREnU1fS6QLAJwsLNmCEkmcX8Ql6TX8jX5C21r/mS9Mxg0D0g5K2oyhbmnEEDM3N6+hCEhnkcCfn8+fef/OjHP/npz37+6S+Wfvmrz379m8+/+O2FyKZFAOdBFmfF1dAXEEcpnMtIxnCVF+Anwxguh7ebir8soRBRlvblQw5vEj9Mo3EU+BKh80H54e3a28+Xn68+1z/e4sFadbDcqX56b79Y+2wwyoJpAqkMYl+I12vPc/lm5hcyCmKYLw2mAnI/uPVDeI2HqZ+AeDPTdzv3niIy8sZZgf9S6WmUnzHzEyEekiH2THw5EU1OgW3c66kcf/NmFqX5VEIamAuNp7EnM08N3RtFBQQyfsADPygivFcvmPiFH0icIOcqw8QZw0xGOID50tJT9eMdbV96h+v9PW9re2f/aL+/f3x05mlqqe1eV/C3GqlYUWGXnnqHfnHrCbwVXAHhZWMv8HNzrCalgDEURZSG6r5HURkJ220chdMC8E5TuAuyJPHT0WyAYAxjOZ/NBpB4X3Xx+I/z+UKfAJcKCttrU7fa+hVROKmDnapGWy+Z5bZPP8vbegwzKbPEdtrQrYV+1bh9281/rMfQ9hg+1iOwPYLHeoxsj5Hqgcuwh6OL1Qg938P+ShcwxjQaeTg3iRsDjxU4f732BqMMx97ymgqCUXb0ophVQ9XBihdnd1A8CzApV5cGGFJPK4yX12ZmAf82wNZMB2g7HW83kn686u2gGITEnFJrL9SKIW8i7tiIO82ImpZ3mb3m8ovqqsKznTwcUdV4Yc94P/VHdMryy+WvF05bqc+xRy95qK/1cM6Mqj86Hah8c/NVCjjz0RLATog5+8yefdZy9qk9S+f8XVZn2Wo9MebqQs9MnYOPTE0z4KQAaIZk8ZZfLkakWWOxXy7G9lMPcBHUyS1TBu/NmG2XxwftxJnmORSeimPCbFdhttvCrHuFf0fz3gj27Nkzv8yikTcVamuKxl6eCRFhmTGh89jH1KniP353asPNMZNaxqgYc3rV5/8eZBVosw60+YOBcMxpCHoPNn2FiaHh+o5QKpa2oZ49e1QmeHd+HGZYYCZJyziRM3dXd/roQFmohZGu21DrLaGs4O31cBB1rI9vBn3npPUfPGlhUnPctKqRM/Up1NyuOvrYopjzm+rt1ef33PPtSOsL4F2r40dvuBIcRLESa6wOcEPHDuqoijeOs6zQtD4yvD6sOiA1TGZrzWojC0yE+WygKn/gx7OtZofSj6MR7/DWHBfJzFDzhZAgZPsJmpnXI4JcqBqXiyjO0qo+nWKILPFKv4h8zFarb5D+TEW+l2lWJBj1yQChJ3M7nUWD9okZusyQmMBlAmJGLjMiBlwGiBm7zJiY0GVCYiYuMyEmcpmImHcu846YW5e5JSZ2mXiuZVwkXiQwY9GAjx7UZmdWcMV7NxXSG2Xpl9JTXhjl+KB2HmdhvKSKnbqxU7pq5jIZMbnL5MS8d5n3xBQuUxAjXEYQI11GEjN1mSkxpcuUxNy5zB0x9y5zT8yDyzwQ88FlPsyNzbMJgJU5q7f3skqSmUml4ZilTX3fcmKyxPbQbcYzjsNDgllulAHBLDHKEcEsK0ogmKVEOSaY5UMZEsySoZwQzDKhnBLM0qB8RzDLgfKWYJYAZUxwzOCE4ITBbKL5DGcEMzGXOcFMyeV7gpmMy4JgpuFSECz4ohIs2+eES7ckmOm2vCOYiba8J5gptnwgmMm1/ECw1ep2DOoztf60V7ToFozoWvdlMMpr3ZnByK91bwajwdbdGYwQW/dnMGps3aHBSLJ1jwajy9ZdGrlH92kwCm3dqcHItHWvBqPV5m5tucTlEs49uhODkW7rXgxGv627MRgRt+7HYJTcuiODkXPrngxG0627Mhhht+7LYNTdujODkXjr3gxG5627Mxixt+7PYBT/+A6NuVBEQe1QknXKj3VKm2SD4A0GbxK8yeAtgrcYvE3wNoN3CN5h8C7BuwzeI3iPwfsE7zP4FcGvGHxA8AGDuwR3GXxI8CGDjwg+YvAxwccM7hHcY/AJwScMPiX4lMFnBJ8xuE9wn8HnBJ8z+ILgCwZfEnzJ4CuCrxh8TfA1g28Ivnl8e3VFB0Z1TKPrTL9aeozb4Nymy21ybsvltji37XLbnNtxuR3O7brcLuf2XG6Pc/sut8+5Vy73inMHLnfAua7LdTl36HKHnDtyuSPOHbvcMed6Ltfj3InLnXDu1OVOOXfmcmec67tcn3PnLnfOuQuXu+Dcpctdcu7K5a44d+1y15y7cTkr+wtuIcoPoD9H4GfX5/W5ZZbCzH6etVgyNdAgoaJRiihM/ArXx0RZu6wo1yqXFcyQoUHIomiDgggZE21LECE7UlY3SSZEWxBEyHpo44EIGQ5tNxAhm6FNBiJkLrS1QIQshTYUiJCR0DYCkZhNkUHINGjLgEjKptYgZBC0PUCEbIE2BYiQGdBWAJGCzbxBBJtwg1C5L6sVY+tVGoRKuy7siFBB1+UcESrjuogjQsVbl25E2oyq61BLP84nar3171qc5bASh9aFBelTGD20qKjYT4YjdYY5ICJLIFS4/k2wVqtSqgUwICL4P0FWvJVwLWyFW4m2Hshsxu9/psRqWyjWgFoo1BEb1EwJ1LZQoGNqoThDaqEwJ9TC22X3ioJ8Ry0U4y2bm5kSYT3ymRKgbeFksllE8WVsSmZKdLaFontPLRRcwWZqpoRWT9BMicy2cKLZNKPASmqhuO6ohcK6pxaK6oFaKKgP8+rrMCzB9wbX5Rd1RmVXF11EqNjqUosIlVhdYBGhwqrLKiJUTnUxRYSKqC6hiFDp1IUTESqYulwiQmVSF0lEqDjq0ogIlURdEBGhQqjLICJU/nTxQ4SKni55iFCp04UOESpwurwhQmVNFzVEqJjpUoYIlTBdwBChwqXLFiJUrnSxQoSKlC5RiFBp0oUJESpIuhwhQmVIFyFEbtgKUl0Y8rKQ9CbVRjzAIzZ7NvUV063Svx4cK0BntgChivqQCvU98hYEsV8AimqyrnYgvKLxgWIcqaeokAbZKEpDDOZPY4WIcX2czGdCPQA+A/lYgGEWj34ozPB+jknYfIibCv31oSmpVTz9ALsamjTWMxVM/XLDYqR/uWkxygC5ZTHKAbltMcoCuWMxygO5azHKBLlnMcoFuW8xygb5ymKUD/LAYpQRsmsxygl5aDHKCnlkMcoLeWwxygzZsxjlhjyxGGWHPLUY5Yc8sxhliOxbjHJEnluMskReWIzyRF5ajDJFXlmMckVeW4yyRd5YzJg1FPJu4ecTw4b2I3DgfBIJNxhMugg3GUzSCLcYTOoItxlMAgl3GEwaCXcZTDIJ9xhMSgn3GUxiCV8xmPQSHjCYJBN2GUyqCQ8ZTMIJjxhM2gmPGUzyCXsMJgWFJwwmEYWnDCYdhWcMJimFfQaTmsJzBpOgwgsGk6bCSwaTrMIrBpOywmsGk7jCGwbbDwO4tVVWTdQPWIZMXGKDUNKW2CSUpCW2CNXKeupt6S85pgI83xMgPbx0DCNve8UbQuArXE4i4d1l03iEELbAE/orEfSS08JTL/5kMQZSr8LAfY7eUn/Pa79t36ErkjrFLqEkTrFHKGlT7BNK0hSvCCVligNCSZiiSyjpUhwSSrIUR4SSKsUxoSRK0SOUNClOCCVJilNCSZHijFASpOgTSnoU54SSHMUFoaRGcUkoiVFcEUpaFNeEkhTFDaH105gUfR/ojxC+eQ5TmUAgB9B1zb+yh+vUQqluUAslukktlOYWtXCz26YWimiHWiieXWqhaPaohWLZpxaK5BW1UBwH1EJRdKmFYjikForgiFq4+MfUwkXvUQsX+4RauMin1MLFPaMWLmqfWriY59TCRbygFi7eJbVw0a6ohYt1TS1cpBt2vcppVS5LLRnwJZPGceGWovJXv8uHSWzQFe8ukpNsKj20O94dlrQcCtcQATkixw1Vl5e1BnTHBSMI2i5Bwy+BNkzQcEygLRM0PBNo0wQN1wTaNkHDN4E2TtBwTqCtEzS8E2jzBA33BNo+QcM/gTZQ0HBQoC0UNDwUaBMFDRcF2kZBw0eBNlLQcFKgrRQ0vBRoMwUNNwXaTkHDT4E2VNBwVKAtFTQ8FWhTBQ1XBdpWQcNXgTZW0HBWoK0VNLwVaHMFDXcF2l5Bw1+BNljAHBZ+UsCSI4speNN0BEX8oN5nGvnS90JIocBqo9qRQKUPp6r0uLLNVdf5LH87GxTJTDd04VNRIcmjIsKS55xfv1Y4fNDlTr8hoi6C9bER2748MvElflJ3L+H07PGevXnbzSTZCOKPDUR3qEdiWgvXqTr1PtYpl1E8gqrnQDfqu6/PwG1CZsHEF+q1W38qM/0JCgrnDhvvtuamT32P1SmLNzACp59ptvQrkMBNx/YzTdRCoJ+huZ1jP4/9AOb1yzbdCph7T73q2J1e9/zteV3xtps30hXsfZ5ukz2d89re2DWTnM1xg4yLuX3u5hIFhPP6SVqTCiSNUbWicQRFM7TIxjLx76mnBZr9sFhk+v0m85BtMUoeT9XoP6gnAS570J3zl5sOugsLeOEXdAeq0Ywv8Zdf4NoXGet5trAAm1lJtGoogV5m8bjwE/VAanKXFWhQhf8gvCfd7148US/26FfWp6l5QVXkuP5Cv1j2ZABxzPrYB6JPvQ0sgJjyqfrvAfMdEvWCm3LBJijrrd4uzaahrpnaFEcSVnR4kXmjDFS4u+g2ymEU+auNt5OzIonVc/35rPvd83kLmaWguLU2Tt7p8160cbli8hZGa6H73SBKx/KhmTq5X6iHw7ht+CpZzgD3WuGH4EWpl2aVoZdwv+ptTjKhpidTBjCYeFv42TeFL4U3zLLb1SXncc5xrnbnrPgTarwI9Q3g78GKOvpYR7VPmo541B5SqxW76f8f6dFHQfXVy38xyIE/xDyLs7thAf7tkv4Dir+qnz/Xfy6xeHDxYnXt5erXJ18vf/tN9acUn3Z+3/lD56vOWucvnW87e51e57wTdKLO3zv/6Pxz7V9r/177z9r3puuPPqnO+V3H+Vn77/8AQMRpEw== z 2 AAAyKHiclVvbctvIEeXmulGyyW7ymBdUZNduUrLKsreSzdvqLlmURIm6m14XCDZBWLgZM4Qks5hfyGvyC/mavKX2NV+SnhkMugeEvBVV2cKcM2hgZk5PH4LQMI8jIZ8///6TH/34Jz/92c8//cXSL3/12a9/8/kXv70Q2bQI4DzI4qy4GvoC4iiFcxnJGK7yAvxkGMPl8HZT8ZclFCLK0jP5kMObxA/TaBwFvkTofFB+ePvi7efLz1ef6x9v8WCtOljuVD+9t1+sfTYYZcE0gVQGsS/E67XnuXwz8wsZBTHMlwZTAbkf3PohvMbD1E9AvJnpu517TxEZeeOswH+p9DTKz5j5iRAPyRB7Jr6ciCanwDbu9VSOv3kzi9J8KiENzIXG09iTmaeG7o2iAgIZP+CBHxQR3qsXTPzCDyROkHOVYeKMYSYjHMB8aemp+vGOti+9w/WzPW9re2f/aP9s//io72lqqe1eV/C3GqlYUWGXnnqHfnHrCbwVXAHhZWMv8HNzrCalgDEURZSG6r5HURkJ220chdMC8E5TuAuyJPHT0WyAYAxjOZ/NBpB4X3Xx+I/z+UKfAJcKCttrU7fa+hVROKmDnapGWy+Z5bbPWZa39RhmUmaJ7bShWwv9qnH7tpv/WI+h7TF8rEdgewSP9RjZHiPVA5dhD0cXqxF6vof9lS5gjGk08nBuEjcGHitw/nrtDUYZjr3lNRUEo+zoRTGrhqqDFS/O7qB4FmBSri4NMKSeVhgvr83MAv5tgK2ZDtB2Ot5uJP141dtBMQiJOaXWXqgVQ95E3LERd5oRNS3vMnvN5RfVVYVnO3k4oqrxwp7xfuqP6JTll8tfL5y2Up9jj17yUF/r4fSNqj86Hah8c/NVCjjz0RLATog5u2/P7recfWrP0jl/l9VZtlpPjLm60DNT5+AjU9MMOCkAmiFZvOWXixFp1ljsl4ux/dQDXAR1csuUwXszZtvl8UE7caZ5DoWn4pgw21WY7bYw617h39G8N4I9e/bML7No5E2F2pqisZdnQkRYZkzoPPYxdar4j9+d2nBzzKSWMSrGnF71+b8HWQXarANt/mAgHHMagt6DTV9hYmi4viOUiqVtqGfPHpUJ3p0fhxkWmEnSMk7kzN3VnT46UBZqYaTrNtR6SygreHs9HEQd6+ObwZlz0voPnrQwqTluWtXImfoUam5XHX1sUcz5TfX26vN77vl2pPUF8K7V8aM3XAkOoliJNVYHuKFjB3VUxRvHWVZoWh8ZXh9WHZAaJrO1ZrWRBSbCfDZQlT/w49lWs0Ppx9GId3hrjotkZqj5QkgQsv0EzczrEUEuVI3LRRRnaVWfTjFElnilX0Q+ZqvVN0h/piLfyzQrEoz6ZIDQk7mdzqJB+8QMXWZITOAyATEjlxkRAy4DxIxdZkxM6DIhMROXmRATuUxEzDuXeUfMrcvcEhO7TDzXMi4SLxKYsWjARw9qszMruOK9mwrpjbL0S+kpL4xyfFA7j7MwXlLFTt3YKV01c5mMmNxlcmLeu8x7YgqXKYgRLiOIkS4jiZm6zJSY0mVKYu5c5o6Ye5e5J+bBZR6I+eAyH+bG5tkEwMqc1dt7WSXJzKTScMzSpr5vOTFZYnvoNuMZx+EhwSw3yoBglhjliGCWFSUQzFKiHBPM8qEMCWbJUE4IZplQTglmaVC+I5jlQHlLMEuAMiY4ZnBCcMJgNtF8hjOCmZjLnGCm5PI9wUzGZUEw03ApCBZ8UQmW7XPCpVsSzHRb3hHMRFveE8wUWz4QzORafiDYanU7BvWZWn/aK1p0C0Z0rfsyGOW17sxg5Ne6N4PRYOvuDEaIrfszGDW27tBgJNm6R4PRZesujdyj+zQYhbbu1GBk2rpXg9Fqc7e2XOJyCece3YnBSLd1Lwaj39bdGIyIW/djMEpu3ZHByLl1Twaj6dZdGYywW/dlMOpu3ZnBSLx1bwaj89bdGYzYW/dnMIp/fIfGXCiioHYoyTrlxzqlTbJB8AaDNwneZPAWwVsM3iZ4m8E7BO8weJfgXQbvEbzH4H2C9xn8iuBXDD4g+IDBXYK7DD4k+JDBRwQfMfiY4GMG9wjuMfiE4BMGnxJ8yuA+wX0GnxF8xuBzgs8ZfEHwBYMvCb5k8BXBVwy+JviawTcE3zy+vbqiA6M6ptF1pl8tPcZtcG7T5TY5t+VyW5zbdrltzu243A7ndl1ul3N7LrfHuX2X2+fcK5d7xbkDlzvgXNflupw7dLlDzh253BHnjl3umHM9l+tx7sTlTjh36nKnnOu7XJ9zZy53xrlzlzvn3IXLXXDu0uUuOXflclecu3a5a87duJyV/QW3EOUH0J8j8LPr8/rcMkthZj/PWiyZGmiQUNEoRRQmfoXrY6KsXVaUa5XLCmbI0CBkUbRBQYSMibYliJAdKaubJBOiLQgiZD208UCEDIe2G4iQzdAmAxEyF9paIEKWQhsKRMhIaBuBSMymyCBkGrRlQCRlU2sQMgjaHiBCtkCbAkTIDGgrgEjBZt4ggk24Qajcl9WKsfUqDUKlXRd2RKig63KOCJVxXcQRoeKtSzcibUbVdailH+cTtd76dy3OcliJQ+vCgvQpjB5aVFTsJ8OROsMcEJElECpc/yZYq1Up1QIYEBH8nyAr3kq4FrbCrURbD2Q24/c/U2K1LRRrQC0U6ogNaqYEalso0DG1UJwhtVCYE2rh7bJ7RUG+oxaK8ZbNzUyJsB75TAnQtnAy2Syi+DI2JTMlOttC0b2nFgquYDM1U0KrJ2imRGZbONFsmlFgJbVQXHfUQmHdUwtF9UAtFNSHefV1GJbge4Pr8os6o7Kriy4iVGx1qUWESqwusIhQYdVlFREqp7qYIkJFVJdQRKh06sKJCBVMXS4RoTKpiyQiVBx1aUSESqIuiIhQIdRlEBEqf7r4IUJFT5c8RKjU6UKHCBU4Xd4QobKmixoiVMx0KUOESpguYIhQ4dJlCxEqV7pYIUJFSpcoRKg06cKECBUkXY4QoTKkixAiN2wFqS4MeVlIepNqIx7gEZs9m/qK6VbpXw+OFaC+LUCoojNIhfoeeQuC2C8ARTVZVzsQXtH4QDGO1FNUSINsFKUhBvOnsULEuD5O5jOhHgD3QT4WYJjFox8KM7yfYxI2H+KmQn99aEpqFU8/wK6GJo31TAVTv9ywGOlfblqMMkBuWYxyQG5bjLJA7liM8kDuWowyQe5ZjHJB7luMskG+shjlgzywGGWE7FqMckIeWoyyQh5ZjPJCHluMMkP2LEa5IU8sRtkhTy1G+SH7FqMMkWcWoxyR5xajLJEXFqM8kZcWo0yRVxajXJHXFqNskTcWM2YNhbxb+PnEsKH9CBw4n0TCDQaTLsJNBpM0wi0GkzrCbQaTQMIdBpNGwl0Gk0zCPQaTUsJ9BpNYwlcMJr2EBwwmyYRdBpNqwkMGk3DCIwaTdsJjBpN8wh6DSUHhCYNJROEpg0lHYZ/BJKXwjMGkpvCcwSSo8ILBpKnwksEkq/CKwaSs8JrBJK7whsH2wwBubZVVE/UDliETl9gglLQlNgklaYktQrWynnpb+kuOqQDP9wRIDy8dw8jbXvGGEPgKl5NIeHfZNB4hhC3whP5KBL3ktPDUiz9ZjIHUqzBwn6O31N/z2m/bd+iKpE6xSyiJU+wRStoU+4SSNMUrQkmZ4oBQEqboEkq6FIeEkizFEaGkSnFMKIlS9AglTYoTQkmS4pRQUqToE0qCFGeEkh7FOaEkR3FBKKlRXBJKYhRXhJIWxTWhJEVxQ2j9NCZF3wf6I4RvnsNUJhDIAXRd86/s4Tq1UKob1EKJblILpblFLdzstqmFItqhFopnl1oomj1qoVj2qYUieUUtFMcBtVAUXWqhGA6phSI4ohYu/jG1cNF71MLFPqEWLvIptXBx+9TCRT2jFi7mObVwES+ohYt3SS1ctCtq4WJdUwsX6YZdr3JalctSSwZ8yaRxXLilqPzV7/JhEht0xbuL5CSbSg/tjneHJS2HwjVEQI7IcUPV5WWtAd1xwQiCtkvQ8EugDRM0HBNoywQNzwTaNEHDNYG2TdDwTaCNEzScE2jrBA3vBNo8QcM9gbZP0PBPoA0UNBwUaAsFDQ8F2kRBw0WBtlHQ8FGgjRQ0nBRoKwUNLwXaTEHDTYG2U9DwU6ANFTQcFWhLBQ1PBdpUQcNVgbZV0PBVoI0VNJwVaGsFDW8F2lxBw12BtlfQ8FegDRYwh4WfFLDkyGIK3jQdQRE/qPeZRr70vRBSKLDaqHYkUOnDqSo9rmxz1XU+y9/OBkUy0w1d+FRUSPKoiLDkOefXrxUOH3S502+IqItgfWzEti+PTHyJn9TdSzg9e7xnb952M0k2gvhjA9Ed6pGY1sJ1qk69j3XKZRSPoOo50I367uszcJuQWTDxhXrt1p/KTH+CgsK5w8a7rbnpU99jdcriDYzA6WeaLf0KJHDTsf1ME7UQ6GdobufYz2M/gHn9sk23AubeU686dqfXPX97Xle87eaNdAV7n6fbZE/nvLY3ds0kZ3PcIONibp+7uUQB4bx+ktakAkljVK1oHEHRDC2ysUz8e+ppgWY/LBaZfr/JPGRbjJLHUzX6D+pJgMsedOf85aaD7sICXvgF3YFqNONL/OUXuPZFxnr2FxZgMyuJVg0l0MssHhd+oh5ITe6yAg2q8B+E96T73Ysn6sUe/cr6NDUvqIoc11/oF8ueDCCOWR/7QPSpt4EFEFM+Vf89YL5Dol5wUy7YBGW91dul2TTUNVOb4kjCig4vMm+UgQp3F91GOYwif7XxdnJWJLF6rj+fdb97Pm8hsxQUt9bGyTt93os2LldM3sJoLXS/G0TpWD40Uyf3C/VwGLcNXyVLH3CvFX4IXpR6aVYZegn3q97mJBNqejJlAIOJt4WffVP4UnjDLLtdXXIe5xznanfOij+hxotQ3wD+Hqyoo491VPuk6YhH7SG1WrGb/v+RHmcoqDP18l8McuAPMc/i7G5YgH+7pP+A4q/q58/1n0ssHly8WF17ufr1ydfL335T/SnFp53fd/7Q+aqz1vlL59vOXqfXOe8Enajz984/Ov9c+9fav9f+s/a96fqjT6pzftdxftb++z9yhGkU z 2 = Q ( O | z 2 ) AAAyP3iclVvLctzGFR07L4eJEzvZJRs4lMp2imKJkitxFqky36Q4fA7fGlmFwdzBQMRL6B4Mqcmk8jXZJr+Qz8gXZJfKNrvc7kbj3gZBucIqiehzGhfo7nP7nsGAgzyOhHz69J8ffPi97//ghz/66McLP/npxz/7+Sef/uJcZJMigLMgi7PicuALiKMUzmQkY7jMC/CTQQwXg5t1xV+UUIgoS0/lXQ6vEj9Mo1EU+BKh15/8qr8BsfT75bvXz/qf/bH/2fEXh3/SrS9ff7L4dPmp/vHuH6xUB4ud6ufo9acrH/eHWTBJIJVB7AvxcuVpLl/N/EJGQQzzhf5EQO4HN34IL/Ew9RMQr2Z6EHPvMSJDb5QV+C+Vnkb5GTM/EeIuGWDPxJdj0eQU2Ma9nMjR169mUZpPJKSBudBoEnsy89SMeMOogEDGd3jgB0WE9+oFY7/wA4nz5lxlkDhjmMkIBzBfWHisfryDzQtvf/V0x9vY3No92D3dPTzoeZpaaLvXJfytRiqWVNiFx96+X9x4Am8FF0Z42cgL/Nwcq0kpYARFEaWhuu9hVEbCdhtF4aQAvNMUpkGWJH46nPURjGEk57NZHxLviy4efzmf3+sT4FJBYXut61ZbvyIKx3WwE9Vo6yWz3PY5zfK2HoNMyiyxndZ0616/aty+7eY/1GNgewwe6hHYHsFDPYa2x1D1wGXYwdHFaoSe72F/pQsYYXYNPZybxI2Bxwqcv1x5hVEGI29xRQXBKFt6UcyqoepgyYuzKRRPAszV5YU+htTTCqPFlZlZwD/3sTXTAdpOx9uNpB8ve1soBiExp9TaC7ViyJuIWzbiVjOipuU0s9dcfFZdVXi2k4cjqhrP7BlvJ/6QTll8vvjVvdOW6nPs0XMe6is9nJ5R9XunA5Vvbr5KAWc+WgLYCTFn9+zZvZazT+xZOuenWZ1ly/XEmKsLPTN1Dj4wNc2A4wKgGZLFW3x+PyLNGov9/H5sP/UAF0Gd3DJl8NaM2XZ5eNBOnEmeQ+GpOCbMZhVmsy3Mqlf4U5r3RrAnT574ZRYNvYlQW1M08vJMiAirjwmdxz6mThX/4btTG26OmdQyRsWY06s+//cgq0DrdaD17wyEY05D0Huw6StMDA3Xd4RSsbQN9eTJgzLBu/PjMMMCM05axomcubu603sHykLdG+mqDbXaEsoK3l4PB1HHev9mcOqctPqdJ92b1Bw3rWrkTH0KNberjt63KOb8pnqP6vOP3PPtSOsL4F2r4wdvuBIcRLESa6wOcEPHDuqoijeKs6zQtD4yvD6sOiA1SGYrzWojC0yE+ayvKn/gx7ONZofSj6Mh7/DaHBfJzFDzeyFByPYTNDOvRwS5UDUuF1GcpVV9OsEQWeKVfhH5mK1W3yD9mYp8K9OsSDDqoz5Cj+Z2OosG7RMzcJkBMYHLBMQMXWZIDLgMEDNymRExocuExIxdZkxM5DIRMW9c5g0xNy5zQ0zsMvFcy7hIvEhgxqIvH96pzc6s4JL3ZiKkN8zSz6WnvDDK8U7tPM7CeEkVO3Vjp3TVzGUyYnKXyYl56zJviSlcpiBGuIwgRrqMJGbiMhNiSpcpiZm6zJSYW5e5JebOZe6Ieecy7+bG5tkEwMqc1dt7WSXJzKTSYMTSpr5vOTZZYnvoNuMZx+EBwSw3yoBglhjlkGCWFSUQzFKiHBHM8qEMCWbJUI4JZplQTghmaVC+IZjlQHlDMEuAMiY4ZnBCcMJgNtF8hjOCmZjLnGCm5PItwUzGZUEw03ApCBZ8UQmW7XPCpVsSzHRbTglmoi1vCWaKLe8IZnIt3xFstboZg/pMrT/tFS26BSO61n0ZjPJad2Yw8mvdm8FosHV3BiPE1v0ZjBpbd2gwkmzdo8HosnWXRu7BfRqMQlt3ajAybd2rwWi1uVtbLnG5hHMP7sRgpNu6F4PRb+tuDEbErfsxGCW37shg5Ny6J4PRdOuuDEbYrfsyGHW37sxgJN66N4PReevuDEbsrfszGMU/vENjLhRRUDuUZJXyY5XSJlkjeI3B6wSvM3iD4A0GbxK8yeAtgrcYvE3wNoN3CN5h8C7Buwx+QfALBu8RvMfgLsFdBu8TvM/gA4IPGHxI8CGDjwg+YvAxwccMPiH4hME9gnsMPiX4lMFnBJ8x+JzgcwZfEHzB4EuCLxl8RfAVg68Jvn54e3VFB0Z1TKOrTL9aeoxb49y6y61zbsPlNji36XKbnNtyuS3ObbvcNud2XG6Hc7sut8u5Fy73gnN7LrfHua7LdTm373L7nDtwuQPOHbrcIeeOXO6Ic8cud8y5E5c74VzP5XqcO3W5U86dudwZ585d7pxzFy53wblLl7vk3JXLXXHu2uWs7M+5hSjfgf4cgZ9dn9bnllkKM/t51mLJxED9hIpGKaIw8StcHxNl7bKiXKtcVjBDBgYhi6INCiJkTLQtQYTsSFndJJkQbUEQIeuhjQciZDi03UCEbIY2GYiQudDWAhGyFNpQIEJGQtsIRGI2RQYh06AtAyIpm1qDkEHQ9gARsgXaFCBCZkBbAUQKNvMGEWzCDULlvqxWjK1XaRAq7bqwI0IFXZdzRKiM6yKOCBVvXboRaTOqrkMt/Tgfq/XWv2txloNKHFoXFqRPYfTQoqJiPxkM1RnmgIgsgVDh+jfBWq1KqRbAgIjg/wRZ8VbCtbAVbiXaeiCzGb//mRKrbaFYA2qhUIdsUDMlUNtCgY6oheIMqYXCHFMLb5fdKwryDbVQjDdsbmZKhPXIZ0qAtoWTyWYRxZexKZkp0dkWiu4ttVBwBZupmRJaPUEzJTLbwolm04wCK6mF4ppSC4V1Sy0U1R21UFDv5tXXYViCbw2uyy/qjMquLrqIULHVpRYRKrG6wCJChVWXVUSonOpiiggVUV1CEaHSqQsnIlQwdblEhMqkLpKIUHHUpRERKom6ICJChVCXQUSo/OnihwgVPV3yEKFSpwsdIlTgdHlDhMqaLmqIUDHTpQwRKmG6gCFChUuXLUSoXOlihQgVKV2iEKHSpAsTIlSQdDlChMqQLkKIXLMVpLow4GUhORpXG3Efj9js2dRXTLdK/3pwrAD1bAFCFZ1CKtT3yBsQxH4BKKrxqtqB8IrGB4pRpJ6iQhpkwygNMZg/iRUiRvVxMp8J9QC4B/KhAIMsHn5XmMHtHJOw+RA3FfrrQ1NSq3j6AXY1NGmsZyqY+uWaxUj/ct1ilAFyw2KUA3LTYpQFcstilAdy22KUCXLHYpQLctdilA3yhcUoH+SexSgjZNdilBNy32KUFfLAYpQX8tBilBnyyGKUG/LYYpQd8sRilB+yZzHKEHlqMcoReWYxyhJ5bjHKE3lhMcoUeWkxyhV5ZTHKFnltMWPWUMjbhZ+PDRvaj8CB80kkXGMw6SJcZzBJI9xgMKkj3GQwCSTcYjBpJNxmMMkk3GEwKSXcZTCJJXzBYNJLuMdgkkzYZTCpJtxnMAknPGAwaSc8ZDDJJzxiMCkoPGYwiSg8YTDpKOwxmKQUnjKY1BSeMZgEFZ4zmDQVXjCYZBVeMpiUFV4xmMQVXjPYfhjAra2yaqJ+wDJg4hJrhJK2xDqhJC2xQahW1mNvQ3/JMRHg+Z4A6eGlYxh6m0veAAJf4XIcCW+aTeIhQtgCT+ivRNBLTgpPvfiTxRhIvQoDtzl6S/09r/22fYuuSOoU24SSOMUOoaRNsUsoSVO8IJSUKfYIJWGKLqGkS7FPKMlSHBBKqhSHhJIoxRGhpElxTChJUpwQSooUPUJJkOKUUNKjOCOU5CjOCSU1igtCSYziklDSorgilKQorgmtn8ak6PtAf4TwzXOYygQCOYCua/6VPVylFkp1jVoo0XVqoTQ3qIWb3Sa1UERb1ELxbFMLRbNDLRTLLrVQJC+oheLYoxaKokstFMM+tVAEB9TCxT+kFi76EbVwsY+phYt8Qi1c3B61cFFPqYWLeUYtXMRzauHiXVALF+2SWrhYV9TCRbpm16ucVuWy1JIBXzJpHBduKSp/9bt8mMQGXfKmkRxnE+mh3fGmWNJyKFxDBOSIHDdUXV7WGtAd7xlB0HYJGn4JtGGChmMCbZmg4ZlAmyZouCbQtgkavgm0cYKGcwJtnaDhnUCbJ2i4J9D2CRr+CbSBgoaDAm2hoOGhQJsoaLgo0DYKGj4KtJGChpMCbaWg4aVAmylouCnQdgoafgq0oYKGowJtqaDhqUCbKmi4KtC2Chq+CrSxgoazAm2toOGtQJsraLgr0PYKGv4KtMEC5rDwkwKWHFlMwJukQyjiO/U+09CXvhdCCgVWG9WOBCp9MFGlx5VtrrrOZ/nrWb9IZrqhC5+KCkkeFRGWPOf8+rXCwZ0ud/oNEXURrI+N2PblkbEv8ZO6ewmn5xHveTRvu5kkG0L8voHoDvVITOvedapOR+/rlMsoHkLVs68b9d3XZ+A2IbNg7Av12q0/kZn+BAWFc4eNd1tz06e+x+qU+zcwBKefabb0K5DATcf2M03UQqCfobmdYz+P/QDm9cs23QqYe4+96tidXvf8zXld8TabN9IV7H2ebpM9mfPa3tg1k5zNcYOMi7l97uYSBYTz+klakwokjVG1olEERTO0yEYy8W+ppwWa/bBYZPr9JvOQ7X6UPJ6o0b9TTwJcdq875y837XXvLeC5X9AdqEYzvsRffoFrX2SsZ+/eAqxnJdGqoQR6kcWjwk/UA6nxNCvQoAr/TniPut8+e6Re7NGvrE9S84KqyHH9hX6x7FEf4pj1sQ9EH3trWAAx5VP13x3mOyTqBTflgk1Q1lu9XZpNQl0ztSmOJCzp8CLzhhmocNPoJsphGPnLjbeTsyKJ1XP9+az77dN5C5mloLiVNk5O9XnP2rhcMXkLo7XQ/bYfpSN510yd3C/Uw2HcNnyVLD3AvVb4IXhR6qVZZegl3C576+NMqOnJlAEMxt4GfvZN4XPhDbLsZnnBeZxzmKvdOSt+ixovQn0D+Lu/pI7e11Htk6YjHrWH1GrFbvr/B3qcoqBO1ct/Mci+P8A8i7PpoAD/ZkH/AcUf1M/v6j+XuH9w/mx55fnyV8dfLX7zdfWnFB91ft35TeeLzkrn951vOjudo85ZJ+j8pfPXzt86f1/5x8q/Vv698h/T9cMPqnN+2XF+Vv77P25McN4= z 1 = Q ( O | z 1 ) AAAyP3iclVvLctzGFaWdl8PEiZ3skg0cSmU7RbFEyZU4i1SZb1IcPmf41MgqDOYOBiJeQvdgSE0mla/JNvmFfEa+ILtUttnldjca9zYIyhVWSUSf07hAd5/b9wwGHORxJOTTp//84MPvff8HP/zRRz9e/MlPP/7Zzz/59BfnIpsUAZwFWZwVlwNfQBylcCYjGcNlXoCfDGK4GNxsKP6ihEJEWdqTdzm8SvwwjUZR4EuEXn/yq/4mxNLvl+9er/Y/+2P/s5Mvjv6kW1++/mTp6cpT/ePdP1itDpYWqp/j15+uftwfZsEkgVQGsS/Ey9WnuXw18wsZBTHMF/sTAbkf3PghvMTD1E9AvJrpQcy9x4gMvVFW4L9UehrlZ8z8RIi7ZIA9E1+ORZNTYBv3ciJHX7+aRWk+kZAG5kKjSezJzFMz4g2jAgIZ3+GBHxQR3qsXjP3CDyTOm3OVQeKMYSYjHMB8cfGx+vEOty68g7Xerre5tb13uNfbOzrseppabLvXZfytRiqWVdjFx96BX9x4Am8FF0Z42cgL/Nwcq0kpYARFEaWhuu9hVEbCdhtF4aQAvNMUpkGWJH46nPURjGEk57NZHxLviw4efzmf3+sT4FJBYXtt6FZbvyIKx3WwU9Vo6yWz3PbpZXlbj0EmZZbYTuu6da9fNW7fdvMf6jGwPQYP9Qhsj+ChHkPbY6h64DLs4uhiNULP97C/0gWMMLuGHs5N4sbAYwXOX66+wiiDkbe0qoJglG29KGbVUHWw7MXZFIonAebqymIfQ+pphdHS6sws4J/72JrpAG2n4+1G0o9XvG0Ug5CYU2rthVox5E3EbRtxuxlR03Ka2WsuPauuKjzbycMRVY1n9oy3E39Ipyw9X/rq3mnL9Tn26DkP9ZUeTteo+r3Tgco3N1+lgDMfLQHshJizu/bsbsvZp/YsnfPTrM6ylXpizNWFnpk6Bx+YmmbAcQHQDMniLT2/H5FmjcV+fj+2n3qAi6BObpkyeGvGbLs8PGgnziTPofBUHBNmqwqz1RZmzSv8Kc17I9iTJ0/8MouG3kSorSkaeXkmRITVx4TOYx9Tp4r/8N2pDTfHTGoZo2LM6VWf/3uQVaCNOtDGdwbCMach6D3Y9BUmhobrO0KpWNqGevLkQZng3flxmGGBGSct40TO3F3d6b0DZaHujXTNhlprCWUFb6+Hg6hjvX8z6DknrX3nSfcmNcdNqxo5U59Cze2qo/ctijm/qd7j+vxj93w70voCeNfq+MEbrgQHUazEGqsD3NCxgzqq4o3iLCs0rY8Mrw+rDkgNktlqs9rIAhNhPuuryh/48Wyz2aH042jIO7w2x0UyM9T8XkgQsv0EzczrEUEuVI3LRRRnaVWfTjFElnilX0Q+ZqvVN0h/piLfyjQrEoz6qI/Qo7mdzqJB+8QMXGZATOAyATFDlxkSAy4DxIxcZkRM6DIhMWOXGRMTuUxEzBuXeUPMjcvcEBO7TDzXMi4SLxKYsejLh3dqszMruOy9mQjpDbP0c+kpL4xyvFM7j7MwXlLFTt3YKV01c5mMmNxlcmLeusxbYgqXKYgRLiOIkS4jiZm4zISY0mVKYqYuMyXm1mVuiblzmTti3rnMu7mxeTYBsDJn9fZeVkkyM6k0GLG0qe9bjk2W2B66zXjGcXhAMMuNMiCYJUY5JJhlRQkEs5QoRwSzfChDglkylGOCWSaUE4JZGpRvCGY5UN4QzBKgjAmOGZwQnDCYTTSf4YxgJuYyJ5gpuXxLMJNxWRDMNFwKggVfVIJl+5xw6ZYEM92WU4KZaMtbgpliyzuCmVzLdwRbrW7FoD5T6097RYtuwYiudV8Go7zWnRmM/Fr3ZjAabN2dwQixdX8Go8bWHRqMJFv3aDC6bN2lkXtwnwaj0NadGoxMW/dqMFpt7taWS1wu4dyDOzEY6bbuxWD027obgxFx634MRsmtOzIYObfuyWA03borgxF2674MRt2tOzMYibfuzWB03ro7gxF76/4MRvEP79CYC0UU1A4lWaP8WKO0SdYJXmfwBsEbDN4keJPBWwRvMXib4G0G7xC8w+BdgncZvEfwHoNfEPyCwfsE7zO4Q3CHwQcEHzD4kOBDBh8RfMTgY4KPGXxC8AmDTwk+ZXCX4C6DewT3GHxG8BmDzwk+Z/AFwRcMviT4ksFXBF8x+Jrg64e3V1d0YFTHNLrG9Kulx7h1zm243AbnNl1uk3NbLrfFuW2X2+bcjsvtcG7X5XY5t+dye5x74XIvOLfvcvuc67hch3MHLnfAuUOXO+Tckcsdce7Y5Y45d+JyJ5w7dblTznVdrsu5nsv1OHfmcmecO3e5c85duNwF5y5d7pJzVy53xblrl7OyP+cWonwH+nMEfnZ9Wp9bZinM7OdZiyUTA/UTKhqliMLEr3B9TJS1y4pyrXJZwQwZGIQsijYoiJAx0bYEEbIjZXWTZEK0BUGErIc2HoiQ4dB2AxGyGdpkIELmQlsLRMhSaEOBCBkJbSMQidkUGYRMg7YMiKRsag1CBkHbA0TIFmhTgAiZAW0FECnYzBtEsAk3CJX7sloxtl6lQai068KOCBV0Xc4RoTKuizgiVLx16Uakzai6DrX043ys1lv/rsVZDipxaF1YkD6F0UOLior9ZDBUZ5gDIrIEQoXr3wRrtSqlWgADIoL/E2TFWwnXwla4lWjrgcxm/P5nSqy2hWINqIVCHbJBzZRAbQsFOqIWijOkFgpzTC28XXavKMg31EIx3rC5mSkR1iOfKQHaFk4mm0UUX8amZKZEZ1sourfUQsEVbKZmSmj1BM2UyGwLJ5pNMwqspBaKa0otFNYttVBUd9RCQb2bV1+HYQm+Nbguv6gzKru66CJCxVaXWkSoxOoCiwgVVl1WEaFyqospIlREdQlFhEqnLpyIUMHU5RIRKpO6SCJCxVGXRkSoJOqCiAgVQl0GEaHyp4sfIlT0dMlDhEqdLnSIUIHT5Q0RKmu6qCFCxUyXMkSohOkChggVLl22EKFypYsVIlSkdIlChEqTLkyIUEHS5QgRKkO6CCFyzVaQ6sKAl4XkeFxtxH08YrNnU18xnSr968GxAtS1BQhV1INUqO+RNyGI/QJQVOM1tQPhFY0PFKNIPUWFNMiGURpiMH8SK0SM6uNkPhPqAXAX5EMBBlk8/K4wg9s5JmHzIW4q9NeHpqRW8fQD7Gpo0ljPVDD1y3WLkf7lhsUoA+SmxSgH5JbFKAvktsUoD+SOxSgT5K7FKBfknsUoG+QLi1E+yH2LUUbIjsUoJ+SBxSgr5KHFKC/kkcUoM+SxxSg35InFKDvkqcUoP2TXYpQhsmcxyhF5ZjHKEnluMcoTeWExyhR5aTHKFXllMcoWeW0xY9ZQyDuFn48NG9qPwIHzSSRcZzDpItxgMEkj3GQwqSPcYjAJJNxmMGkk3GEwySTcZTApJdxjMIklfMFg0ku4z2CSTNhhMKkmPGAwCSc8ZDBpJzxiMMknPGYwKSg8YTCJKDxlMOko7DKYpBT2GExqCs8YTIIKzxlMmgovGEyyCi8ZTMoKrxhM4gqvGWw/DODWVlk1UT9gGTBxiXVCSVtig1CSltgkVCvrsbepv+SYCPB8T4D08NIxDL2tZW8Aga9wOY6EN80m8RAhbIEn9Fci6CUnhade/MliDKRehYHbHL2l/p7Xftu+TVckdYodQkmcYpdQ0qbYI5SkKV4QSsoU+4SSMEWHUNKlOCCUZCkOCSVViiNCSZTimFDSpDghlCQpTgklRYouoSRI0SOU9CjOCCU5inNCSY3iglASo7gklLQorgglKYprQuunMSn6PtAfIXzzHKYygUAOoOOaf2UP16iFUl2nFkp0g1oozU1q4Wa3RS0U0Ta1UDw71ELR7FILxbJHLRTJC2qhOPaphaLoUAvFcEAtFMEhtXDxj6iFi35MLVzsE2rhIp9SCxe3Sy1c1B61cDHPqIWLeE4tXLwLauGiXVILF+uKWrhI1+x6ldOqXJZaMuBLJo3jwi1F5a9+lw+T2KDL3jSS42wiPbQ73hRLWg6Fa4iAHJHjhqrLy1oDuuM9IwjaLkHDL4E2TNBwTKAtEzQ8E2jTBA3XBNo2QcM3gTZO0HBOoK0TNLwTaPMEDfcE2j5Bwz+BNlDQcFCgLRQ0PBRoEwUNFwXaRkHDR4E2UtBwUqCtFDS8FGgzBQ03BdpOQcNPgTZU0HBUoC0VNDwVaFMFDVcF2lZBw1eBNlbQcFagrRU0vBVocwUNdwXaXkHDX4E2WMAcFn5SwJIjiwl4k3QIRXyn3mca+tL3QkihwGqj2pFApQ8mqvS4ss1V1/ksfz3rF8lMN3ThU1EhyaMiwpLnnF+/Vji40+VOvyGiLoL1sRHbvjwy9iV+Uncv4fQ85j2P5203k2RDiN83EN2hHolp3btO1en4fZ1yGcVDqHr2daO++/oM3CZkFox9oV679Scy05+goHDusPFua2761PdYnXL/Bobg9DPNln4FErjp2H6miVoI9DM0t3Ps57EfwLx+2aZTAXPvsVcdu9Prnr81ryveVvNGOoK9z9NpsqdzXtsbu2aSszlukHExt8/dXKKAcF4/SWtSgaQxqlY0iqBohhbZSCb+LfW0QLMfFotMv99kHrLdj5LHEzX6d+pJgMvud+b85ab9zr0FPPcLugPVaMaX+MsvcO2LjPXs3luAjawkWjWUQC+yeFT4iXogNZ5mBRpU4d8J71Hn22eP1Is9+pX1SWpeUBU5rr/QL5Y96kMcsz72gehjbx0LIKZ8qv67w3yHRL3gplywCcp6q7dLs0moa6Y2xZGEZR1eZN4wAxVuGt1EOQwjf6XxdnJWJLF6rj+fdb59Om8hsxQUt9rGyak+71kblysmb2G0Fjrf9qN0JO+aqZP7hXo4jNuGr5KlC7jXCj8EL0q9NKsMvYTbFW9jnAk1PZkygMHY28TPvil8LrxBlt2sLDqPc45ytTtnxW9R40WobwB/95fV0fs6qn3SdMSj9pBardhN//9Ajx4Kqqde/otB9v0B5lmcTQcF+DeL+g8o/qB+flf/ucT9g/NnK6vPV746+Wrpm6+rP6X4aOHXC79Z+GJhdeH3C98s7C4cL5wtBAt/Wfjrwt8W/r76j9V/rf579T+m64cfVOf8csH5Wf3v/wAKvHDc G AAAyJHiclVvLctvIFdXkOVEyyUyyzAYV2TWTlKyy7Klkshu9JYuSKIl6mh4XCF6CsPAyuglKZjE/kG3yC/ma7FJZZJNvye1uNO5tEPJUVGULfU7jAt19bt9DEBrkcSTk8+f/+eQHP/zRj3/y009/tvzzX3z2y199/sWvL0U2KQK4CLI4K64HvoA4SuFCRjKG67wAPxnEcDW421L8VQmFiLK0Jx9yeJP4YRqNosCXCJ3uvf185fnac/3jLR6sVwcrS9VP9+0X65/1h1kwSSCVQewL8Xr9eS7fzPxCRkEM8+X+REDuB3d+CK/xMPUTEG9m+k7n3lNEht4oK/BfKj2N8jNmfiLEQzLAnokvx6LJKbCNez2Ro2/ezKI0n0hIA3Oh0ST2ZOapYXvDqIBAxg944AdFhPfqBWO/8AOJk+NcZZA4Y5jJCAcwX15+qn68450r72ijt+9t7+weHB/0Dk6Ozz1NLbfd6yr+ViMVqyrs8lPvyC/uPIG3grMvvGzkBX5ujtWkFDCCoojSUN33MCojYbuNonBSAN5pCtMgSxI/Hc76CMYwkvPZrA+J91UHj38/ny/0CXCpoLC9tnSrrV8RheM62JlqtPWSWW779LK8rccgkzJLbKdN3VroV43bt938x3oMbI/BYz0C2yN4rMfQ9hiqHrgM+zi6WI3Q8z3sr3QBI0yhoYdzk7gx8FiB89frbzDKYOStrKsgGGVXL4pZNVQdrHpxNoXiWYAJubbcx5B6WmG0sj4zC/iXPrZmOkDb6Xi7kfTjNW8XxSAk5pRae6FWDHkTcddG3G1G1LScZvaaKy+qqwrPdvJwRFXjhT3j/cQf0ikrL1e+XjhttT7HHr3kob7Wwzk3qv7odKDyzc1XKeDMR0sAOyHm7HN79nnL2Wf2LJ3z06zOsrV6YszVhZ6ZOgcfmZpmwHEB0AzJ4q28XIxIs8Ziv1yM7ace4CKok1umDN6bMdsujw/aiTPJcyg8FceE2anC7LSF2fAKf0rz3gj27Nkzv8yioTcRamuKRl6eCRFhiTGh89jH1KniP353asPNMZNaxqgYc3rV5/8eZBVoqw609b2BcMxpCHoPNn2FiaHh+o5QKpa2oZ49e1QmeHd+HGZYYMZJyziRM3dXd/roQFmohZFu2FAbLaGs4O31cBB1rI9vBj3npI3vPWlhUnPctKqRM/Up1NyuOvrYopjzm+rt1ud33fPtSOsL4F2r40dvuBIcRLESa6wOcEPHDuqoijeKs6zQtD4yvD6sOiA1SGbrzWojC0yE+ayvKn/gx7PtZofSj6Mh7/DWHBfJzFDzhZAgZPsJmpnXI4JcqBqXiyjO0qo+nWGILPFKv4h8zFarb5D+TEW+l2lWJBj1SR+hJ3M7nUWD9okZuMyAmMBlAmKGLjMkBlwGiBm5zIiY0GVCYsYuMyYmcpmImHcu846YO5e5IyZ2mXiuZVwkXiQwY9F8Dx/UZmdWcNV7NxHSG2bpl9JTXhjl+KB2HmdhvKSKnbqxU7pq5jIZMbnL5MS8d5n3xBQuUxAjXEYQI11GEjNxmQkxpcuUxExdZkrMvcvcE/PgMg/EfHCZD3Nj82wCYGXO6u29rJJkZlJpMGJpU9+3HJsssT10m/GM4/CAYJYbZUAwS4xySDDLihIIZilRjghm+VCGBLNkKMcEs0woJwSzNCjfEcxyoLwjmCVAGRMcMzghOGEwm2g+wxnBTMxlTjBTcvmeYCbjsiCYabgUBAu+qATL9jnh0i0JZrotpwQz0Zb3BDPFlg8EM7mWHwi2Wt2JQX2m1p/2ihbdghFd674MRnmtOzMY+bXuzWA02Lo7gxFi6/4MRo2tOzQYSbbu0WB02bpLI/foPg1Goa07NRiZtu7VYLTa3K0tl7hcwrlHd2Iw0m3di8Hot3U3BiPi1v0YjJJbd2Qwcm7dk8FounVXBiPs1n0ZjLpbd2YwEm/dm8HovHV3BiP21v0ZjOIf36ExF4ooqB1KskH5sUFpk2wSvMngLYK3GLxN8DaDdwjeYfAuwbsM3iN4j8H7BO8z+IDgAwa/IvgVgw8JPmRwh+AOg48IPmLwMcHHDD4h+ITBXYK7DD4l+JTBZwSfMfic4HMG9wjuMfiC4AsGXxJ8yeArgq8YfE3wNYNvCL5h8C3Bt49vr67owKiOaXSD6VdLj3GbnNtyuS3ObbvcNud2XG6Hc7sut8u5PZfb49y+y+1z7sDlDjj3yuVece7Q5Q4513G5DueOXO6Ic8cud8y5E5c74VzX5bqcO3W5U86dudwZ585d7pxzPZfrce7C5S44d+lyl5y7crkrzl273DXnblzuhnO3Lmdlf8ktRPkB9OcI/Oz6vD63zFKY2c+zFksmBuonVDRKEYWJX+H6mChrlxXlWuWyghkyMAhZFG1QECFjom0JImRHyuomyYRoC4IIWQ9tPBAhw6HtBiJkM7TJQITMhbYWiJCl0IYCETIS2kYgErMpMgiZBm0ZEEnZ1BqEDIK2B4iQLdCmABEyA9oKIFKwmTeIYBNuECr3ZbVibL1Kg1Bp14UdESroupwjQmVcF3FEqHjr0o1Im1F1HWrpx/lYrbf+XYuzHFTi0LqwIH0Ko4cWFRX7yWCozjAHRGQJhArXvwnWalVKtQAGRAT/J8iKtxKuha1wK9HWA5nN+P3PlFhtC8UaUAuFOmSDmimB2hYKdEQtFGdILRTmmFp4u+xeUZDvqIVivGNzM1MirEc+UwK0LZxMNosovoxNyUyJzrZQdO+phYIr2EzNlNDqCZopkdkWTjSbZhRYSS0U15RaKKx7aqGoHqiFgvowr74OwxJ8b3BdflFnVHZ10UWEiq0utYhQidUFFhEqrLqsIkLlVBdTRKiI6hKKCJVOXTgRoYKpyyUiVCZ1kUSEiqMujYhQSdQFEREqhLoMIkLlTxc/RKjo6ZKHCJU6XegQoQKnyxsiVNZ0UUOEipkuZYhQCdMFDBEqXLpsIULlShcrRKhI6RKFCJUmXZgQoYKkyxEiVIZ0EULklq0g1YUBLwtJd1xtxH08YrNnU18xnSr968GxAnRuCxCqqAepUN8jb0MQ+wWgqMYbagfCKxofKEaReooKaZANozTEYP4kVogY1cfJfCbUA+BzkI8FGGTx8PvCDO7nmITNh7ip0F8fmpJaxdMPsKuhSWM9U8HULzctRvqXWxajDJDbFqMckDsWoyyQuxajPJB7FqNMkPsWo1yQBxajbJCvLEb5IA8tRhkhOxajnJBHFqOskMcWo7yQJxajzJBdi1FuyFOLUXbIM4tRfshzi1GGyJ7FKEfkhcUoS+SlxShP5JXFKFPktcUoV+SNxShb5K3FjFlDIe8Vfj42bGg/AgfOJ5Fwk8Gki3CLwSSNcJvBpI5wh8EkkHCXwaSRcI/BJJNwn8GklPCAwSSW8BWDSS/hIYNJMmGHwaSa8IjBJJzwmMGknfCEwSSfsMtgUlB4ymASUXjGYNJReM5gklLYYzCpKbxgMAkqvGQwaSq8YjDJKrxmMCkrvGEwiSu8ZbD9MIBbW2XVRP2AZcDEJTYJJW2JLUJJWmKbUK2sp962/pJjIsDzPQHSw0vHMPR2Vr0BBL7C5TgS3jSbxEOEsAWe0F+JoJecFJ568SeLMZB6FQbuc/SW+nte+237Ll2R1Cn2CCVxin1CSZvigFCSpnhFKClTHBJKwhQdQkmX4ohQkqU4JpRUKU4IJVGKLqGkSXFKKElSnBFKihTnhJIgRY9Q0qO4IJTkKC4JJTWKK0JJjOKaUNKiuCGUpChuCa2fxqTo+0B/hPDNc5jKBAI5gI5r/pU93KAWSnWTWijRLWqhNLephZvdDrVQRLvUQvHsUQtFs08tFMsBtVAkr6iF4jikFoqiQy0UwxG1UATH1MLFP6EWLnqXWrjYp9TCRT6jFi7uObVwUXvUwsW8oBYu4iW1cPGuqIWLdk0tXKwbauEi3bLrVU6rcllqyYAvmTSOC7cUlb/6XT5MYoOuetNIjrOJ9NDueFMsaTkUriECckSOG6ouL2sN6I4LRhC0XYKGXwJtmKDhmEBbJmh4JtCmCRquCbRtgoZvAm2coOGcQFsnaHgn0OYJGu4JtH2Chn8CbaCg4aBAWyhoeCjQJgoaLgq0jYKGjwJtpKDhpEBbKWh4KdBmChpuCrSdgoafAm2ooOGoQFsqaHgq0KYKGq4KtK2Chq8Cbayg4axAWytoeCvQ5goa7gq0vYKGvwJtsIA5LPykgCVHFhPwJukQivhBvc809KXvhZBCgdVGtSOBSh9MVOlxZZurrvNZ/nbWL5KZbujCp6JCkkdFhCXPOb9+rXDwoMudfkNEXQTrYyO2fXlk7Ev8pO5ewunZ5T2787abSbIhxB8biO5Qj8S0Fq5Tdep+rFMuo3gIVc++btR3X5+B24TMgrEv1Gu3/kRm+hMUFM4dNt5tzU2f+h6rUxZvYAhOP9Ns6VcggZuO7WeaqIVAP0NzO8d+HvsBzOuXbToVMPeeetWxO73u+TvzuuLtNG+kI9j7PJ0mezbntb2xayY5m+MGGRdz+9zNJQoI5/WTtCYVSBqjakWjCIpmaJGNZOLfU08LNPthscj0+03mIdtilDyeqNF/UE8CXPawM+cvNx12Fhbw0i/oDlSjGV/iL7/AtS8y1vN8YQG2spJo1VACvcriUeEn6oHUeJoVaFCF/yC8J53vXjxRL/boV9YnqXlBVeS4/kK/WPakD3HM+tgHok+9TSyAmPKp+u8B8x0S9YKbcsEmKOut3i7NJqGumdoURxJWdXiRecMMVLhpdBflMIz8tcbbyVmRxOq5/nzW+e75vIXMUlDcehsnp/q8F21crpi8hdFa6HzXj9KRfGimTu4X6uEwbhu+SpZzwL1W+CF4UeqlWWXoJdyveVvjTKjpyZQBDMbeNn72TeFL4Q2y7G5t2Xmcc5Kr3Tkr/oAaL0J9A/i7v6qOPtZR7ZOmIx61h9RqxW76/0d69FBQPfXyXwyy7w8wz+JsOijAv1vWf0DxZ/Xzx/rPJRYPLl+srb9c+/r065Vvv6n+lOLTpd8u/W7pq6X1pT8tfbu0v9RdulgKlmDpr0t/W/r7+j/W/7n+r/V/m64/+KQ65zdLzs/6f/8HLqNnVg== Figure 2: Multi-V iew Agreement voting mechanism. A gi ven ob- ject O is vie wed from random vie wpoints z 1 , z 2 . The pose-voting network Q computes a transform that moves each viewpoint to a canonical frame. The percepts computed by the feature-voting network F from each canonical frame must now be the same. pose) that maps points expressed in the vie wpoint’ s frame to the global frame. A point x i observed from a viewpoint z , will be represented as x i | z = z − 1 x i , where denotes the application of a transformation to a point. A capsule c = ( c q , c f ) observed from a viewpoint z will be repre- sented as c | z = ( z − 1 ◦ c q , c f ) where ◦ denotes the com- position of two coordinate transformations. In general, the notation “ | z ” should be read as “as observed from z ”. 3.2 Multi-V iew Agr eement W e introduce a novel v oting mechanism to discover the parent object’ s value coded representation using auxiliary viewpoints. Recall that the goal is to find the two capsule components: the parent object’ s canonical pose with respect to the viewer ( c q ) and a pose-inv ariant feature vector ( c f ). Let O represent an object in some global reference frame (e.g. a set of points, or a set of part capsules that belong to the object). Suppose we have a function F that records the appearance of the object (its “percept”), i.e. for an object O and a viewpoint z (expressed in the same global refer- ence frame), F ( O | z ) represents the object’ s percept. Now suppose the object is observ ed from multiple random vie w- points Z = { z 1 , z 2 , . . . , z K } . The percepts F ( O | z k ) are likely to be different, as shown in Figure 2 . Howe ver , if we can find a coordinate transformation ∆ z k = Q ( O | z k ) such that the composition z k ◦ ∆ z k , is a canonical pose of the object, then the percepts from these transformed vie wpoints will agree (i.e. f k = F ( O | z k ◦ ∆ z k ) will be the same for all k ). Once this happens, the agreed upon percept can be set to be c f , and any one of the transformed viewpoints, say , z 1 ◦ ∆ z 1 can be set to be c q . Note that we want the per - cepts from the transformed vie wpoints to agree, and not the transformed vie wpoints to themselv es agree. This mitigates issues arising from objects having symmetries which make it impossible to hav e a unique canonical pose. In this framework, F can be seen as a feature-voting net- work and Q as a pose-voting network, both of which will be learned. Since the object’ s canonical pose is not known, no direct supervision is a vailable for training Q (i.e. we don’ t hav e target values for ∆ z k ). Moreover , due to objects hav- ing symmetries, we cannot ask the transformed viewpoints z k ◦ ∆ z k to agree. Howe v er , we kno w that the percept v otes f k , must all agree. Therefore, by training the models to make the percept votes agree, both F and Q can be jointly learned. In addition to agreement, we also need to ensure that the agreed upon percept c f , contains all the non-pose attributes of the object. Therefore, we train a decoder net- work G that takes c f as input and reconstructs the object in its canonical pose O | c q = G ( c f ) . T o model agreement from the percepts, we compute their mean µ = 1 K P K k =1 f k and variance σ = 1 K P K k =1 ( f k − µ ) 2 . The consensus percept c f , is modeled as a sample from N ( µ , σ 2 ) . This is similar to the approach taken in EM Routing [ 8 ]. If the votes disagree, the sample will be noisy , and the decoder will not be able to decode the object back from the sampled percept. Therefore, the decoder will try to reduce the noise in the input, making the percepts agree. 3.3 PointsT oParts A utoencoder An autoencoder is used to encode a set of 3D points into a set of part-le vel geometric capsules. Let X = { x i } I i =1 be a set of 3D points, where x i ∈ R 3 , and V = { ( v j q , v j f ) } J j =1 be a set of part capsules whose states we w ant to infer 1 . Let R ij ∈ [0 , 1] be the probability of x i belonging to part j . T o apply Multi-V ie w Agreement, we need a feature-voting net- work F , pose-voting network Q , and decoding netw ork G . W e architect Q and F to be similar to a PointNet [ 15 ], where a function embeds the points, weights them by their membership R ij to the part, before max-pooling them: Q ( X | z j , R ) = Q project ( maxpool i R ij Q embed ( x i | z )) , (1) F ( X | z j , R ) = F project ( maxpool i R ij F embed ( x i | z )) . (2) Both the embedding and projection networks consist of 3 ResNet blocks. The output for Q is a 7-D vector , which is interpreted as a pose transformation by normalizing the last 4 dimensions to lie on a unit sphere and multiplying them by − 1 if the first element is negati v e. F outputs the percept. The PointsT oParts encoding process is described in the PointsT oPartsEncoder Procedure of Algorithm 1 and illus- trated in Figure 3a . The procedure starts with some initial part capsules and outputs updated part capsules. P art cap- sules are initialized by setting their translation components 1 W e do not need to infer the existence probabilities of these capsules, since the capsules are v alue coded and every capsule can make itself useful by modeling some part of the input. While simpler objects should ideally require fewer capsules to describe, in this work we developed our models using a fixed number of part capsules for all objects. 3 A p p l e C on f i d e n t i a l –I n t e r n a l U s e O n l y random viewpoints . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . F ol d i n g N e t G ✓ AAAyEHiclVvbctxIcuWuL7umLztrP/oFYUqxawfFEKWJ8D4u76TYvF+laY0Cjc5GQ8RNqGqQVEfvR+zr+kP85vCr/8C/4S9wVhYKmQWCmlhGjIg8pypRl5OVCRAzKtNE6dev//dnP/+Lv/yrv/7FL/9m+W//7u//4Vff/fofr1UxqyK4ioq0qG5HoYI0yeFKJzqF27KCMBulcDO62zL8TQ2VSor8Uj+W8DEL4zyZJFGoEbrd+zTUU9Dhp+9WXq+9pp/g6cV6c7Gy1Pycfvr16/8bjotolkGuozRU6of116X+OA8rnUQpLJaHMwVlGN2FMfyAl3mYgfo4pwEvgpeIjINJUeF/uQ4IlT3mYabUYzbCllmop6rLGbCP+2GmJ7/7OE/ycqYhj+yNJrM00EVgZh+MkwoinT7iRRhVCY41iKZhFUYa18i7yyjz5jDXCU5gsbz80vwExzs3wdHG5X6wvbN7cHxweXByfBEQtdw31lX8bWaqVo3b5ZfBUVjdBQqHgpuggmISRGFpr82iVDCBqkry2Ix7nNSJcs0mSTyrAEeaw31UZFmYj+dDBFOY6MV8PoQs+O0Ar/91sXjSJsKtgsq12iKrr12VxNPW2bkx+lrponRtLouyr8Wo0LrIXKNNsp60a+Ydumbhcy1GrsXouRaRaxE912LsWoxNC9yGfZxdamYYhAG2N7qACUbSOMC1yXwfeG3AxQ/rH9HLaBKsrBsn6GWXNsXuGqoOVoO0uIfqVYRxubY8RJe0rDBZWZ/bDfzDEK05OejrjsNNdJiuBbsoBqUxpszeK7NjyFuPu87jbtcj0fq+cPdcedPcVQWuUYAzaow3rseXWTjmLitvV75/0m217eOu3kpX39N0Lqyqv7kcqHw7+CYEvPXoceAWxPa+cL0venqfu14U8/dFG2Vr7cLYuytamTYGn1marsNpBdB1KfytvH3qkVdN+H771HeYB4CbYDr3LBl8sXN2TZ6ftOdnVpZQBcaPdbPTuNnpc7MRVOE9r3vH2atXr8K6SMbBTJmjKZkEZaFUgpnGui7TEEOn8f/86MyBW2Ik9czRMLZ70+bPnmTjaKt1tPWTjnDOeQx0Btu2yvoguB0RSsXRztWrV8/KBEcXpnGBCWaa9cwTOTu6ttE3JypcPZnphnO10ePKCd7dDyfR+vr2YXDpddr4yU5PFrXEQ6uZuVCfQe1wzdW3NsX276r3tO1/6vd3M21vgKM2188OuBEcJKkRa2ou8EDHBuaq8TdJi6Iimq4sT5dNA6RG2Xy9m210hYGwmA9N5o/CdL7dbVCHaTKWDT7Z6yqbW2rxxCUo3d+BmEU7IyiVyXGlStIib/LTOboosqAOqyTEaHX6xrJvbjw/6LyoMvT6YojQi4VbzqpDh8yMfGbETOQzETNjnxkzAz4DzEx8ZsJM7DMxM1OfmTKT+EzCzGef+czMnc/cMZP6TLogGVdZkCiMWKzBx4/msLM7uBp8nikdjIv8NzowtTDK8dGcPN7GBFnjO/d953zXwmcKZkqfKZn54jNfmKl8pmJG+YxiRvuMZmbmMzNmap+pmbn3mXtmHnzmgZlHn3lk5qvPfF3YMs8FAGbmoj3e6yZI5jaURhMRNu246eFItCBb8IKT8IhhERt1xLAIjHrMsIiKGhgWIVFPGBbxUMcMi2CopwyLSKhnDIswqD8zLGKgvmNYBECdMpwKOGM4E7BYaLnCBcNCzHXJsFBy/YVhIeO6YlhouFYMK7mpDOv+NZHSrRkWuq3vGRairR8YFoqtHxkWcq2/Muy0upOCeaamp72qR7dgRdd7LoNVXu/JDFZ+vWczWA32ns5ghdh7PoNVY+8JDVaSvWc0WF32ntLIPXtOg1Vo70kNVqa9ZzVYrXZPa8dlPpdJ7tmTGKx0e89isPrtPY3Birj3PAar5N4TGayce89ksJruPZXBCrv3XAar7t6TGazEe89msDrvPZ3Bir33fAar+OdPaIyFKonaCiXb4PjY4LDJNhneFPAWw1sC3mZ4W8A7DO8IeJfhXQHvMbwn4H2G9wV8wPCBgN8x/E7AhwwfCnjA8EDARwwfCfiY4WMBnzB8IuBThk8FfMbwmYDPGT4X8AXDFwK+ZPhSwFcMXwn4muFrAd8wfCPgW4ZvBfye4fcC/sDwh+ePV190YFUnNLoh9EvSE9ym5LZ8bkty2z63Lbkdn9uR3K7P7Upuz+f2JLfvc/uSO/C5A8m987l3kjv0uUPJDXxuILkjnzuS3LHPHUvuxOdOJHfqc6eSO/O5M8md+9y55C587kJylz53Kbkrn7uS3LXPXUvuxuduJHfrc7eSe+9z7yX3weec7K9lCVF/BXqOwGfX123fushh7p5nHZbNLDTMOGm0NbHB/Xq4bmCBjCzCdQhVIYhw9UG1ByJcc9TNSLjSoDoDEa4vqLpAhKsKqikQ4VqCKglEuIKg+gERrhuoakCEqwWqFRBJxTpYhCsDqgsQycX6WYSrAKoBEOHcT5kfEc74lO8R4TxPWR4RJRbcIpzT62ZbxKbUFuH8TdkbEc7alLMR4VxNmRoRztCUnxHpq0b9MrQO03Jq9pt+twqsR404SBcO5EctfjPRUGmYjcamh71gosggNjj9ZpgkaeToAHSICP7LkErizHSl3ww74TaibScyn8vxz41YnYVijdhCoY7FpOZGoM5CgU7YQnHGbKEwp2zhcMVYUZCf2UIx3om1mRsRtjOfGwE6CxdTrCKKrxBLMjeicxaK7gtbKLhKrNTcCK1doLkRmbNwocUyo8BqtlBc92yhsB7YQlE9soWC+rpo/uaFefbB4pRjUWecWymzIsIZlfIpIpxHKYsiwtmTcicinDMpYyLCmZLyJCKcHyk7IsJZkXIiIpwLKRMiwhmQ8h8inPco6yHC2Y5yHSKc4yjDIcKZjfIaIpzPKJshwlmMchginLsocyHCGYvyFSKcpyhLIcLZiXITIpyTKCMhwpmI8hAinH8o+yDCWYdyDiKcayjTIPJB7CDnhZFMC9nptDmIh3glVs+FvmEGTfi3k2ti2HAXNo5JRZeQK/PH4m2I0rACFNV0w5xAeEdb7KlJYl6VQh4V4ySP0Vk4Sw2iJu11tpgr85b3AvRzDkZFOv4pN6OHBQZh901truhvhDZvNv7oLXUzNW3ry1wJ9etNh7H+9ZbDOAL0tsM4BvSOwzgK9K7DOA70nsM4EvS+wzgW9IHDOBr0O4dxPOhDh3FE6IHDOCb0kcM4KvSxwzgu9InDODL0qcM4NvSZwzg69LnDOD70hcM4QvSlwzhG9JXDOEr0tcM4TvSNwzhS9K3DOFb0e4dxtOgPDrMVGQp5rwrLqWVj95wbeY8b8aaAWRfxloBZGvG2gFkd8Y6AWSDxroBZI/GegFkm8b6AWSnxgYBZLPE7AbNe4kMBs2TigYBZNfGRgFk48bGAWTvxiYBZPvGpgFlB8ZmAWUTxuYBZR/GFgFlK8aWAWU3xlYBZUPG1gFlT8Y2AWVbxrYBZWfF7AbO44g8CdhU/Hm1NqabatygjIS61yShrS20xytJS24ySsl4G2/SXjJmCIAwU6ABvncI42FkNRhCFBtfTRAX3xSwdI4QWBIr+7oG15KwKzNc9RYqOzPcu8FBibUl/zHV/Ut/lO7I61R6jLE61zyhrUx0wytJU7xhlZapDRlmYasAo61IdMcqyVMeMsirVCaMsSnXKKGtSnTHKklTnjLIi1QWjLEh1ySjrUV0xynJU14yyGtUNoyxGdcsoa1G9Z5SlqD4w2r5yybHuA3qECO3LlqYIBK4ABn7xb8rDDbZQqptsoUS32EJpbrOFh90OWyiiXbZQPHtsoWj22UKxHLCFInnHForjkC0UxYAtFMMRWyiCY7Zw80/Ywk0/ZQs3+4wt3ORztnBzL9jCTb1kCzfzii3cxGu2cPNu2MJNu2ULN+s9W7hJH8T9mkqrqbLMloHcMm0rLjxSTPzSB3sYxBZdDe4TPS1mOsByJ7jHlFZC5RdEwBWRVw01t9etBqjhk0IQqFyCTr0EVDBBp2ICKpmgUzMBFU3QqZqAyibo1E1AhRN0Kieg0gk6tRNQ8QSd6gmofIJO/QRUQEGnggIqoaBTQwEVUdCpooDKKOjUUUCFFHQqKaBSCjq1FFAxBZ1qCqicgk49BVRQQaeiAiqpoFNTARVV0KmqgMoq6NRVQIUVdCoroNIKOrUVUHEFneoKqLyCTn0FVGCBqLDwSQFTjq5mEMzyMVTpo/loaRzqMIghhwqzjbEThUofzUzq8WVbmqaLeflpPqyyORmU+IxXyMqkSjDlef3bbwdHj5Tu6DMQcxPMjx3f7guRaajxSd2/hdfyVLY8XfQNJivGkH5rItSgnYm1ntynaXT6rUalTtIxNC2HZLSjb3vgMaGLaBoq821tONMFPUFB5Y2w8wFradu0Y2y6PB3AGLx21uxpVyGBh45rZ03UQkTv0PzGaVimYQSL9ouaQQMsgpdBc+0vr99/Z9FmvJ3uQAZKfLQz6LLnC5nbO6dmVoo17pBptXDv3XyignjRvknrUpHmORormSRQdV2rYqKz8IFbOqDbDpNFQR8x2ZdsT72U6czM/qt5E+Czh4OF/ILpcPBkA6/DikdgjK5/jb/CCve+KkTLiycbsFXUTBvDCPSmSCdVmJkXUtP7osICVYWPKngx+PHNC/P1Dn2XPsvtV6iqxP1X9PXYiyGkqWjjXoi+DDYxAWLI5+afR4x3yMxXbKYKtk5Fa/MJaTGLKWdSUZxoWCX3qgjGBRh398ldUsI4Cdc6nyAXVZaal/eL+eDH14sessjBcOt9nL6nfm/6uNIwZQ9DWhj8OEzyiX7shk4ZVublMB4boQmWC8CzVoUxBEke5EVT0Gt4WAu2poUyy1OYAjCaBtv47JvDb1QwKoq7tWXvdc5JaU7novo31HgV0wDw93DVXH2roTknbUO86ndJasVm9O8zLS5RUJfmC78U9DAcYZylxf2ogvBu+dN3K+vd/yfi6cX1m7X1t2tvzr5f+f3vmv9f4pdL/7z0L0u/XVpf+vel3y/tL50uXS1FS+nSH5f+tPQf639c/8/1/1r/b9v05z9r+vzTkvez/j//D2A6X54= v j q AAAyD3iclVvbctvIEdXmulFuu8ljXlCRXbtJySrJ3qrs4+p+oyRK1N20XSDYBGHhZswQlMxi/mFfkw/JWyqv+YT8Rr4gPTMYdA8EeSuqsoQ+Z6Yxl9PTTRAe5HEk5Orqfz770Y9/8tOf/fzzXyz+8le//s1vv/jyd5cimxQBXARZnBXXA19AHKVwISMZw3VegJ8MYrga3G0q/qqEQkRZei4fcniT+GEajaLAlwhd9cvy3Ye37999sbS6sqp/vMcXa9XF0kL103335ep/+8MsmCSQyiD2hXi9tprLNzO/kFEQw3yxPxGQ+8GdH8JrvEz9BMSbmR7v3HuOyNAbZQX+S6WnUd5j5idCPCQDbJn4ciyanALbuNcTOfr2zSxK84mENDA3Gk1iT2aemrw3jAoIZPyAF35QRDhWLxj7hR9IXCLnLoPEmcNMRjiB+eLic/XjHW9feUfr53ve1vbO/vH++f7Jcc/T1GLbWJfxr5qpWFZuF597R35x5wkcCu6B8LKRF/i5uVaLUsAIiiJKQzXuYVRGwjYbReGkABxpCtMgSxI/Hc76CMYwkvPZrA+J93UHr/80nz9qE+BWQWFbbWqrrV0RhePa2Zky2lrJLLdtzrO8rcUgkzJLbKMNbT1qV83bt838p1oMbIvBUy0C2yJ4qsXQthiqFrgNezi7WM3Q8z1sr3QBIwykoYdrk7g+8FqB89drb9DLYOQtrSkn6GVHb4rZNVQdLHtxNoXiRYBhubLYR5d6WWG0tDYzG/jXPloz7aCtOw43kn684u2gGITEmFJ7L9SOIW887liPO02PmpbTzN5z6WV1V+HZRh7OqDJe2h4fJv6Quiy9WvrmUbfluo+9esVdfaOn0zOq/uRyoPLN4KsQcNajxYFdENO7Z3v3Wnqf2V465qdZHWUr9cKYuwu9MnUMPrE0TYfjAqDpkvlbevXYI60a8/3qsW8/9QA3QXVuWTL4YOZsmzw9acfPJM+h8JQf42a7crPd5mbdK/wprXvD2YsXL/wyi4beRKijKRp5eSZEhInGuM5jH0On8v/06NSBm2MktcxRMaZ71eb/nmTlaLN2tPmDjnDOaQj6DDZthfGh4XpEKBVLW1cvXjwpExydH4cZJphx0jJP5Mzo6kafnChz9Wim69bVeosrK3h7P5xE7evTh8G502n9Bzs9WtQcD61q5kx9CjXDVVef2hTTv6nebt2/6/a3M61vgKNW108OuBIcRLESa6wu8EDHBuqq8jeKs6zQtL4yvL6sGiA1SGZrzWwjCwyE+ayvMn/gx7OtZoPSj6Mhb/DOXBfJzFDzRy5ByPYOmpnXM4JcqByXiyjO0io/naGLLPFKv4h8jFarb5D+THm+l2lWJOj1WR+hZ3O7nEWD9okZuMyAmMBlAmKGLjMkBlwGiBm5zIiY0GVCYsYuMyYmcpmImPcu856YO5e5IyZ2mXiuZVwkXiQwYrEEHz6ow87s4LL3fiKkN8zSr6SnamGU44M6eZyN8ZLKd+r6TumumctkxOQukxPzwWU+EFO4TEGMcBlBjHQZSczEZSbElC5TEjN1mSkx9y5zT8yDyzwQ89FlPs5NmWcDADNzVh/vZRUkMxNKgxELm3rccmyixLbQNuMZx+EBwSw2yoBgFhjlkGAWFSUQzEKiHBHM4qEMCWbBUI4JZpFQTghmYVC+J5jFQHlHMAuAMiY4ZnBCcMJgttB8hTOCmZjLnGCm5PIDwUzGZUEw03ApCBZ8UwmW7WvCpVsSzHRbTglmoi3vCWaKLR8IZnItPxJstbodg/pMrT/tFS26BSO61nMZjPJaT2Yw8ms9m8FosPV0BiPE1vMZjBpbT2gwkmw9o8HosvWURu7JcxqMQltPajAybT2rwWi1eVpbLnG5hHNPnsRgpNt6FoPRb+tpDEbErecxGCW3nshg5Nx6JoPRdOupDEbYrecyGHW3nsxgJN56NoPReevpDEbsreczGMU/fUJjLBRRUFcoyTrFxzqFTbJB8AaDNwneZPAWwVsM3iZ4m8E7BO8weJfgXQbvEbzH4H2C9xl8QPABgw8JPmRwh+AOg48IPmLwMcHHDD4h+ITBXYK7DD4l+JTBZwSfMbhHcI/B5wSfM/iC4AsGXxJ8yeArgq8YfE3wNYNvCL5h8C3Bt08fr67owKiOaXSd6VdLj3EbnNt0uU3ObbncFue2XW6bczsut8O5XZfb5dyey+1xbt/l9jl34HIHnDt0uUPOdVyuw7kjlzvi3LHLHXPuxOVOONd1uS7nTl3ulHNnLnfGuZ7L9Th37nLnnLtwuQvOXbrcJeeuXO6Kc9cud825G5e74dyty1nZX/ISovwI+nMEfnZdrfuWWQoz+3nWYsnEQP2EkkZdEyvcrYfLCmbIwCBUh+gqBBGqPnTtgQjVHGU1Eqo0dJ2BCNUXurpAhKoKXVMgQrWEriQQoQpC1w+IUN2gqwZEqFrQtQIiMVsHg1BloOsCRFK2fgahKkDXAIhQ7teZHxHK+DrfI0J5Xmd5RARbcINQTi+rbWGbUhqE8rfO3ohQ1tY5GxHK1TpTI0IZWudnRNqqUbcMLf04H6v91n9rBZaDShxaFxakj1r0ZKKiYj8ZDFUPc0FElkCocP2XYC1JJUcLoENE8DdBIgoT1VX/JdgKtxJtPZHZjI9/psRqLRRrQBYKdcgmNVMCtRYKdEQWijMkC4U5JguHy8aKgnxPForxjq3NTImwnvlMCdBauJhsFVF8GVuSmRKdtVB0H8hCwRVspWZKaPUCzZTIrIULzZYZBVaSheKakoXCuicLRfVAFgrq47z6zgvz7L3BdY5FnVFu1ZkVEcqoOp8iQnlUZ1FEKHvq3IkI5UydMRGhTKnzJCKUH3V2RISyos6JiFAu1JkQEcqAOv8hQnlPZz1EKNvpXIcI5Tid4RChzKbzGiKUz3Q2Q4SymM5hiFDu0pkLEcpYOl8hQnlKZylEKDvp3IQI5SSdkRChTKTzECKUf3T2QYSyjs45iFCu0ZkGkVu2g5QXBjwtJN1xdRD38Yqtng19xXSq8K8nV8Ww4nomjrWKziEV6sviLQhivwAU1XhdnUB4R1PsiVGkHpVCGmTDKA3RmT+JFSJG9XUynwn1lLcH8ikHgywe/pCbwf0cg7D5pDYV+jtCkzcrf/opdTU1aerLVDD1yw2Lkf7lpsUoAuSWxSgG5LbFKArkjsUoDuSuxSgS5J7FKBbkvsUoGuSBxSge5KHFKCJkx2IUE/LIYhQV8thiFBfyxGIUGbJrMYoNeWoxig55ZjGKD9mzGEWIPLcYxYi8sBhFiby0GMWJvLIYRYq8thjFiryxGEWLvLWYqchQyLuFn48NG9rPuYHzcSPcYDDpItxkMEkj3GIwqSPcZjAJJNxhMGkk3GUwySTcYzApJdxnMIklPGAw6SU8ZDBJJuwwmFQTHjGYhBMeM5i0E54wmOQTdhlMCgpPGUwiCs8YTDoKewwmKYXnDCY1hRcMJkGFlwwmTYVXDCZZhdcMJmWFNwwmcYW3DLYVPx5tVakm6qcoAyYusUEoaUtsEkrSEluEamU997b0NxkTAZ7vCZAe3jqGobe97A0g8BUux5HwptkkHiKEFnhCf++BteSk8NTbPVmMjtT7LnCfY22pv8y1X6nv0B1JnWKXUBKn2COUtCn2CSVpigNCSZnikFASpugQSroUR4SSLMUxoaRKcUIoiVJ0CSVNilNCSZLijFBSpOgRSoIU54SSHsUFoSRHcUkoqVFcEUpiFNeEkhbFDaEkRXFLaP3IJcW6D/RHCN88bKmKQKAKoOMW/6o8XCcLpbpBFkp0kyyU5hZZeNhtk4Ui2iELxbNLFopmjywUyz5ZKJIDslAch2ShKDpkoRiOyEIRHJOFm39CFm56lyzc7FOycJPPyMLN7ZGFm3pOFm7mBVm4iZdk4eZdkYWbdk0WbtYNWbhJt+x+VaVVVVlqy4BvmTQVFx4pKn71C3sYxAZd9qaRHGcT6WG5400xpeVQuAURUEXkVEPV7WWtAd3wUSEIulyCRr0EumCCRsUEumSCRs0EumiCRtUEumyCRt0EunCCRuUEunSCRu0EuniCRvUEunyCRv0EuoCCRgUFuoSCRg0FuoiCRhUFuoyCRh0FupCCRiUFupSCRi0FupiCRjUFupyCRj0FuqCCRkUFuqSCRk0FuqiCRlUFuqyCRl0FurCCRmUFurSCRm0FuriCRnUFuryCRn0FusACVmHhJwVMObKYgDdJh1DED+qlpaEvfS+EFArMNsqOBCp9MFGpx5VtrprOZ/m7Wb9IZtrQiU95hSSPighTntO/fndw8KDTnX4NRN0E82PDt31DZOxL/KTu3sJp2eUtu/O2wSTZEOJPTUQ3qGdirEf3qRp1P9Uol1E8hKplXxv16OseeEzILBj7Qr1b609kpj9BQeGMsPECa27a1GOsujwewBCcdsZsaVcggYeObWdM1EKgn6G5jWM/j/0A5vUbNZ0KmHvPveraXV63//a8znjbzYF0BHtpp9Nkz+Y8tzdOzSRna9wg42Jun7u5RAHhvH6S1qQCSXNUVjSKoGi6FtlIJv49tbRAsx0mi0y/xGQesj32kscTNfuP6kmAyx525vwNpsPOow289AsagTKa/iX+8Qvc+yJjLXuPNmAzK4lWhhLoVRaPCj9RD6TG06zAAlX4D8J71nn78pl6e0e/lz5JzVuoIsf9F/rtsWd9iGPWxj4Qfe5tYALEkE/VrweMd0jUW2yqCjZOWWv1Cmk2CXXO1EVxJGFZuxeZN8xAuZtGd1EOw8hfabyCnBVJrB7ez2edt6vzFjJLQXFrbZyc6n4v27hcMXkLo7XQeduP0pF8aIZO7hfq4TAeG74Klh7gWSv8ELwo9dKsKugl3K94m+NMqOXJVAEYjL0t/OybwlfCG2TZ3cqi8zjnJFenc1b8GTVehHoA+Le/rK4+1VCdk6YhXrW71GrFZvr3Ey3OUVDn6g2/GGTfH2Ccxdl0UIB/t/jui6W15v+JeHxx+XJl7dXKy9Nvlr77tvr/Ep8v/GHhjwtfL6wt/GXhu4W9he7CxUKwcLfw/cLfFv6+9v3aP9b+ufYv0/RHn1V9fr/g/Kz9+38s2l9c v j f ⇠ N ( µ j , j ) AAAyUniclVvbctzGEV3HuTiMncjJY16QUCrbKYolUq6KH837bXm/UyupsNheLEjchJkFSW1tfiJfk9fkF/KSX8lTemYw6B4sKFdYJRJzzqCBmTk9fRYL9fM4EvLVq/989rPPf/6LX/7qi1/P/ebLr377u2df//5CZOMigPMgi7Piqu8LiKMUzmUkY7jKC/CTfgyX/bs1xV+WUIgoS8/kYw5vEz9Mo2EU+BKh989e9sry/fDdbe9PPREl+Dvx5Sjw48nB9NtemYzf3S54vVJEYeK/u/3u/bP5V4uv9I83e7BUHcx3qp+j918vfdUbZME4gVQGsS/Em6VXuXw78QsZBTFM53pjAbkf3PkhvMHD1E9AvJ3ocU29F4gMvGFW4L9UehrlZ0z8RIjHpI891W2LJqfANu7NWA5/eDuJ0nwsIQ3MhYbj2JOZpybJG0QFBDJ+xAM/KCK8Vy8Y+YUfSJxK5yr9xBnDREY4gOnc3Av14x1sXHr7K2fb3vrG5s7BztnO4cGpp6m5tntdwL9qpGJBhZ174e37xZ0n8FZwrYSXDb3Az82xmpQChlAUURqq+x5EZSRst2EUjgvAO03hPsiSxE8Hkx6CMQzldDLpQeJ928Xj76bTmT4BLhUUtteabrX1K6JwVAc7UY22XjLLbZ+zLG/r0c+kzBLbaVW3ZvpV4/ZtN/+pHn3bo/9Uj8D2CJ7qMbA9BqoHLsM2ji5WI/R8D/srXcAQE27g4dwkbgw8VuD0zdJbjNIfevNLKghG2dSLYlYNVQcLXpzdQ/EywPRdnOthSD2tMJxfmpgF/FsPWxMdoO10vN1I+vGit4liEBJzSq29UCuGvIm4aSNuNiNqWt5n9przy9VVhWc7eTiiqrFsz/gw9gd0yvzr+e9nTluoz7FHr3mo7/VwTo2qPzkdqHxz81UKOPPREsBOiDn71J592nL2iT1L5/x9VmfZYj0x5upCz0ydg09MTTPgqABohmTx5l/PRqRZY7Ffz8b2Uw9wEdTJLVMGH8yYbZenB+3EGec5FJ6KY8JsVGE22sKseIV/T/PeCPby5Uu/zKKBNxZqa4qGXp4JEWFBMqHz2MfUqeI/fXdqw80xk1rGqBhzetXn/x5kFWitDrT2k4FwzGkIeg82fYWJoeH6jlAqlrahXr58UiZ4d34cZlhgRknLOJEzd1d3+uRAWaiZka7YUCstoazg7fVwEHWsT28GZ85JKz950syk5rhpVSNn6lOouV119KlFMec31XtUn3/knm9HWl8A71odP3nDleAgipVYY3WAGzp2UEdVvGGcZYWm9ZHh9WHVAal+MllqVhtZYCJMJ7XjWm92KP04GvAO781xkUwMNZ0JCUK2n6CZaT0iyIWqcbmI4iyt6tMJhsgSr/SLyMdstfoG6U9U5AeZZkWCUZ/3EHo+tdNZNGifmL7L9IkJXCYgZuAyA2LAZYCYocsMiQldJiRm5DIjYiKXiYi5dZlbYu5c5o6Y2GXiqZZxkXiRwIxFqz54VJudWcEF73YspDfI0m+kp7wwyvFR7TzOwnhJFTt1Y6d01cxlMmJyl8mJ+eAyH4gpXKYgRriMIEa6jCRm7DJjYkqXKYm5d5l7Yh5c5oGYR5d5JOajy3ycGptnEwArc1Zv72WVJBOTSv0hS5v6vuXIZIntoduMZxyH+wSz3CgDgllilAOCWVaUQDBLiXJIMMuHMiSYJUM5IphlQjkmmKVBeUswy4HyjmCWAGVMcMzghOCEwWyi+QxnBDMxlznBTMnlB4KZjMuCYKbhUhAs+KISLNvnhEu3JJjptrwnmIm2fCCYKbZ8JJjJtfxIsNXqRgzqM7X+tFe06BaM6Fr3ZTDKa92ZwcivdW8Go8HW3RmMEFv3ZzBqbN2hwUiydY8Go8vWXRq5J/dpMApt3anByLR1rwaj1eZubbnE5RLOPbkTg5Fu614MRr+tuzEYEbfux2CU3Lojg5Fz654MRtOtuzIYYbfuy2DU3bozg5F4694MRuetuzMYsbfuz2AU//QOjblQREHtUJIVyo8VSptkleBVBq8RvMbgdYLXGbxB8AaDNwneZPAWwVsM3iZ4m8E7BO8weJfgXQbvEbzH4C7BXQbvE7zP4AOCDxh8SPAhg48IPmLwMcHHDD4h+ITBpwSfMviM4DMGnxN8zuALgi8YfEnwJYOvCL5i8DXB1wy+Ifjm6e3VFR0Y1TGNrjD9aukxbpVzay63xrl1l1vn3IbLbXBu0+U2Obflcluc23a5bc7tuNwO53Zdbpdzey63x7muy3U5t+9y+5w7cLkDzh263CHnjlzuiHPHLnfMuROXO+Hcqcudcu7M5c44d+5y55y7cLkLzl263CXnrlzuinPXLnfNuRuXs7K/4Bai/Aj6cwR+dn1Vn1tmKUzs51mLJWMD9RIqGuY7gwrXx0RZu6wo1yqXFcyQvkHIomiDgggZE21LECE7UlY3SSZEWxBEyHpo44EIGQ5tNxAhm6FNBiJkLrS1QIQshTYUiJCR0DYCkZhNkUHINGjLgEjKptYgZBC0PUCEbIE2BYiQGdBWAJGCzbxBBJtwg1C5L6sVY+tVGoRKuy7siFBB1+UcESrjuogjQsVbl25E2oyq61BLP85Har3131qcZb8Sh9aFBelTGD20qKjYT/oDdYY5ICJLIFS4/kuwVqtSqgUwICL4myAr3kq4FrbCrURbD2Qy4fc/UWK1LRRrQC0U6oANaqIEalso0CG1UJwhtVCYI2rh7bJ7RUHeUgvFeMfmZqJEWI98ogRoWziZbBZRfBmbkokSnW2h6D5QCwVXsJmaKKHVEzRRIrMtnGg2zSiwkloorntqobAeqIWieqQWCurjtPo6DEvwg8F1+UWdUdnVRRcRKra61CJCJVYXWESosOqyigiVU11MEaEiqksoIlQ6deFEhAqmLpeIUJnURRIRKo66NCJCJVEXRESoEOoyiAiVP138EKGip0seIlTqdKFDhAqcLm+IUFnTRQ0RKma6lCFCJUwXMESocOmyhQiVK12sEKEipUsUIlSadGFChAqSLkeIUBnSRQiRG7aCVBf6vCwkR6NqI+7hEZs9m/qK6VbpXw+OFaBTW4BQRWeQCvU98joEsV8Aimq0onYgvKLxgWIYqaeokAbZIEpDDOaPY4WIYX2cTCdCPQA+BflUgH4WD34qTP9hiknYfIibCv31oSmpVTz9ALsamjTWMxVM/XLVYqR/uWYxygC5bjHKAblhMcoCuWkxygO5ZTHKBLltMcoFuWMxyga5azHKB7lnMcoI2bUY5YTctxhlhTywGOWFPLQYZYY8shjlhjy2GGWHPLEY5Yc8tRhliDyzGOWIPLcYZYm8sBjliby0GGWKvLIY5Yq8thhli7yxmDFrKOStws9Hhg3tR+DA+SQSrjKYdBGuMZikEa4zmNQRbjCYBBJuMpg0Em4xmGQSbjOYlBLuMJjEEu4ymPQS7jGYJBN2GUyqCfcZTMIJDxhM2gkPGUzyCY8YTAoKjxlMIgpPGEw6Ck8ZTFIKzxhMagrPGUyCCi8YTJoKLxlMsgqvGEzKCq8ZTOIKbxhsPwzg1lZZNVE/YOkzcYlVQklbYo1QkpZYJ1Qr64W3rr/kGAvwfE+A9PDSMQy8jQWvD4GvcDmKhHefjeMBQtgCT+ivRNBLjgtPvfiTxRhIvQoDDzl6S/09r/22fZOuSOoUW4SSOMU2oaRNsUMoSVPsEkrKFHuEkjBFl1DSpdgnlGQpDgglVYpDQkmU4ohQ0qQ4JpQkKU4IJUWKU0JJkOKMUNKjOCeU5CguCCU1iktCSYziilDSorgmlKQobgitn8ak6PtAf4TwzXOYygQCOYCua/6VPVyhFkp1lVoo0TVqoTTXqYWb3Qa1UESb1ELxbFELRbNNLRTLDrVQJLvUQnHsUQtF0aUWimGfWiiCA2rh4h9SCxf9iFq42MfUwkU+oRYu7im1cFHPqIWLeU4tXMQLauHiXVILF+2KWrhY19TCRbph16ucVuWy1JIBXzJpHBduKSp/9bt8mMQGXfDuIznKxtJDu+PdY0nLoXANEZAjctxQdXlZa0B3nDGCoO0SNPwSaMMEDccE2jJBwzOBNk3QcE2gbRM0fBNo4wQN5wTaOkHDO4E2T9BwT6DtEzT8E2gDBQ0HBdpCQcNDgTZR0HBRoG0UNHwUaCMFDScF2kpBw0uBNlPQcFOg7RQ0/BRoQwUNRwXaUkHDU4E2VdBwVaBtFTR8FWhjBQ1nBdpaQcNbgTZX0HBXoO0VNPwVaIMFzGHhJwUsObIYgzdOB1DEj+p9poEvfS+EFAqsNqodCVR6f6xKjyvbXHWdTvL3k16RTHRDFz4VFZI8KiIsec759WuF/Udd7vQbIuoiWB8bse3LIyNf4id19xJOzyPe82jadjNJNoD4UwPRHeqRmNbMdapOR5/qlMsoHkDVs6cb9d3XZ+A2IbNg5Av12q0/lpn+BAWFc4eNd1tz06e+x+qU2RsYgNPPNFv6FUjgpmP7mSZqIdDP0NzOsZ/HfgDT+mWbbgVMvRdedexOr3v+xrSueBvNG+kK9j5Pt8meTHltb+yaSc7muEHGxdQ+d3OJAsJp/SStSQWSxqha0TCCohlaZEOZ+A/U0wLNflgsMv1+k3nINhslj8dq9B/VkwCX3etO+ctNe92ZBbzwC7oD1WjGl/jHL3Dti4z1PJ1ZgLWsJFo1lEAvs3hY+Il6IDW6zwo0qMJ/FN7z7rvl5+rFHv3K+jg1L6iKHNdf6BfLnvcgjlkf+0D0hbeKBRBTPlW/HjHfIVEvuCkXbIKy3urt0mwc6pqpTXEkYUGHF5k3yECFu4/uohwGkb/YeDs5K5JYPdefTrrvXk1byCwFxS21cfJen7fcxuWKyVsYrYXuu16UDuVjM3Vyv1APh3Hb8FWynALutcIPwYtSL80qQy/hYdFbG2VCTU+mDGAw8tbxs28K3wivn2V3i3PO45zDXO3OWfEX1HgR6hvAv70FdfSpjmqfNB3xqD2kVit207+f6HGGgjpTL//FIHt+H/Mszu77Bfh3c++fzS81/7vE7MHF8uLS68Xl4+/nf/yh+q8UX3T+2Plz59vOUuevnR87252jznkn6Py984/OPzv/Wvr30n+XP1v+3HT92WfVOX/oOD/LX/4PoW12ew== Y j AAAyC3iclVvbctvIEdXmulFuu8ljXlCRXbtJySrJ3qrs4+p+oyRK1N20XSDYBGHhZswQlMxi/mBfkw/JWyqv+Yj8Rr4gPTMYdA8EeSuqsoQ+Z6Yxl9PTTRAe5HEk5Orqfz770Y9/8tOf/fzzXyz+8le//s1vv/jyd5cimxQBXARZnBXXA19AHKVwISMZw3VegJ8MYrga3G0q/qqEQkRZei4fcniT+GEajaLAlwj1bt6+f/fF0urKqv7xHl+sVRdLC9VP992Xq//tD7NgkkAqg9gX4vXaai7fzPxCRkEM88X+REDuB3d+CK/xMvUTEG9meqxz7zkiQ2+UFfgvlZ5GeY+ZnwjxkAywZeLLsWhyCmzjXk/k6Ns3syjNJxLSwNxoNIk9mXlq4t4wKiCQ8QNe+EER4Vi9YOwXfiBxeZy7DBJnDjMZ4QTmi4vP1Y93vH3lHa2f73lb2zv7x/vn+yfHPU9Ti21jXca/aqZiWbldfO4d+cWdJ3AouP7Cy0Ze4OfmWi1KASMoiigN1biHURkJ22wUhZMCcKQpTIMsSfx0OOsjGMNIzmezPiTe1x28/tN8/qhNgFsFhW21qa22dkUUjmtnZ8poayWz3LY5z/K2FoNMyiyxjTa09ahdNW/fNvOfajGwLQZPtQhsi+CpFkPbYqha4Dbs4exiNUPP97C90gWMMIiGHq5N4vrAawXOX6+9QS+Dkbe0ppyglx29KWbXUHWw7MXZFIoXAYbkymIfXeplhdHS2sxs4F/7aM20g7buONxI+vGKt4NiEBJjSu29UDuGvPG4Yz3uND1qWk4ze8+ll9VdhWcbeTijynhpe3yY+EPqsvRq6ZtH3ZbrPvbqFXf1jZ5Oz6j6k8uByjeDr0LAWY8WB3ZBTO+e7d1r6X1me+mYn2Z1lK3UC2PuLvTK1DH4xNI0HY4LgKZL5m/p1WOPtGrM96vHvv3UA9wE1bllyeCDmbNt8vSkHT+TPIfCU36Mm+3KzXabm3Wv8Ke07g1nL1688MssGnoToY6maOTlmRARJhnjOo99DJ3K/9OjUwdujpHUMkfFmO5Vm/97kpWjzdrR5g86wjmnIegz2LQVxoeG6xGhVCxtXb148aRMcHR+HGaYYMZJyzyRM6OrG31yoszVo5muW1frLa6s4O39cBK1r08fBudOp/Uf7PRoUXM8tKqZM/Up1AxXXX1qU0z/pnq7df+u29/OtL4BjlpdPzngSnAQxUqssbrAAx0bqKvK3yjOskLT+srw+rJqgNQgma01s40sMBDms77K/IEfz7aaDUo/joa8wTtzXSQzQ80fuQQh2ztoZl7PCHKhclwuojhLq/x0hi6yxCv9IvIxWq2+Qfoz5fleplmRoNdnfYSeze1yFg3aJ2bgMgNiApcJiBm6zJAYcBkgZuQyI2JClwmJGbvMmJjIZSJi3rvMe2LuXOaOmNhl4rmWcZF4kcCIxfJ7+KAOO7ODy977iZDeMEu/kp6qhVGOD+rkcTbGSyrfqes7pbtmLpMRk7tMTswHl/lATOEyBTHCZQQx0mUkMROXmRBTukxJzNRlpsTcu8w9MQ8u80DMR5f5ODdlng0AzMxZfbyXVZDMTCgNRixs6nHLsYkS20LbjGcchwcEs9goA4JZYJRDgllUlEAwC4lyRDCLhzIkmAVDOSaYRUI5IZiFQfmeYBYD5R3BLADKmOCYwQnBCYPZQvMVzghmYi5zgpmSyw8EMxmXBcFMw6UgWPBNJVi2rwmXbkkw0205JZiJtrwnmCm2fCCYybX8SLDV6nYM6jO1/rRXtOgWjOhaz2Uwyms9mcHIr/VsBqPB1tMZjBBbz2cwamw9ocFIsvWMBqPL1lMauSfPaTAKbT2pwci09awGo9XmaW25xOUSzj15EoORbutZDEa/racxGBG3nsdglNx6IoORc+uZDEbTracyGGG3nstg1N16MoOReOvZDEbnraczGLG3ns9gFP/0CY2xUERBXaEk6xQf6xQ2yQbBGwzeJHiTwVsEbzF4m+BtBu8QvMPgXYJ3GbxH8B6D9wneZ/ABwQcMPiT4kMEdgjsMPiL4iMHHBB8z+ITgEwZ3Ce4y+JTgUwafEXzG4B7BPQafE3zO4AuCLxh8SfAlg68IvmLwNcHXDL4h+IbBtwTfPn28uqIDozqm0XWmXy09xm1wbtPlNjm35XJbnNt2uW3O7bjcDud2XW6Xc3sut8e5fZfb59yByx1w7tDlDjnXcbkO545c7ohzxy53zLkTlzvhXNflupw7dblTzp253Bnnei7X49y5y51z7sLlLjh36XKXnLtyuSvOXbvcNeduXO6Gc7cuZ2V/yUuI8iPozxH42XW17ltmKczs51mLJRMD9RNKGnVNrHC3Hi4rmCEDg1AdoqsQRKj60LUHIlRzlNVIqNLQdQYiVF/o6gIRqip0TYEI1RK6kkCEKghdPyBCdYOuGhChakHXCojEbB0MQpWBrgsQSdn6GYSqAF0DIEK5X2d+RCjj63yPCOV5neUREWzBDUI5vay2hW1KaRDK3zp7I0JZW+dsRChX60yNCGVonZ8RaatG3TK09ON8rPZb/60VWA4qcWhdWJA+atGTiYqK/WQwVD3MBRFZAqHC9V+CtSSVHC2ADhHB3wSJKExUV/2XYCvcSrT1RGYzPv6ZEqu1UKwBWSjUIZvUTAnUWijQEVkozpAsFOaYLBwuGysK8j1ZKMY7tjYzJcJ65jMlQGvhYrJVRPFlbElmSnTWQtF9IAsFV7CVmimh1Qs0UyKzFi40W2YUWEkWimtKFgrrniwU1QNZKKiP8+o7L8yz9wbXORZ1RrlVZ1ZEKKPqfIoI5VGdRRGh7KlzJyKUM3XGRIQypc6TiFB+1NkREcqKOiciQrlQZ0JEKAPq/IcI5T2d9RChbKdzHSKU43SGQ4Qym85riFA+09kMEcpiOochQrlLZy5EKGPpfIUI5SmdpRCh7KRzEyKUk3RGQoQykc5DiFD+0dkHEco6OucgQrlGZxpEbtkOUl4Y8LSQdMfVQdzHK7Z6NvQV06nCv55cFcOK65k41io6h1SoL4u3IIj9AlBU43V1AuEdTbEnRpF6VAppkA2jNERn/iRWiBjV18l8JtRT3h7IpxwMsnj4Q24G93MMwuaT2lTo7whN3qz86afU1dSkqS9TwdQvNyxG+pebFqMIkFsWoxiQ2xajKJA7FqM4kLsWo0iQexajWJD7FqNokAcWo3iQhxajiJAdi1FMyCOLUVTIY4tRXMgTi1FkyK7FKDbkqcUoOuSZxSg+ZM9iFCHy3GIUI/LCYhQl8tJiFCfyymIUKfLaYhQr8sZiFC3y1mKmIkMh7xZ+PjZsaD/nBs7HjXCDwaSLcJPBJI1wi8GkjnCbwSSQcIfBpJFwl8Ekk3CPwaSUcJ/BJJbwgMGkl/CQwSSZsMNgUk14xGASTnjMYNJOeMJgkk/YZTApKDxlMIkoPGMw6SjsMZikFJ4zmNQUXjCYBBVeMpg0FV4xmGQVXjOYlBXeMJjEFd4y2Fb8eLRVpZqon6IMmLjEBqGkLbFJKElLbBGqlfXc29LfZEwEeL4nQHp46xiG3vayN4DAV7gcR8KbZpN4iBBa4An9vQfWkpPCU2/3ZDE6Uu+7wH2OtaX+Mtd+pb5DdyR1il1CSZxij1DSptgnlKQpDgglZYpDQkmYokMo6VIcEUqyFMeEkirFCaEkStEllDQpTgklSYozQkmRokcoCVKcE0p6FBeEkhzFJaGkRnFFKIlRXBNKWhQ3hJIUxS2h9SOXFOs+0B8hfPOwpSoCgSqAjlv8q/JwnSyU6gZZKNFNslCaW2ThYbdNFopohywUzy5ZKJo9slAs+2ShSA7IQnEckoWi6JCFYjgiC0VwTBZu/glZuOldsnCzT8nCTT4jCze3RxZu6jlZuJkXZOEmXpKFm3dFFm7aNVm4WTdk4SbdsvtVlVZVZaktA75l0lRceKSo+NUv7GEQG3TZm0ZynE2kh+WON8WUlkPhFkRAFZFTDVW3l7UGdMNHhSDocgka9RLoggkaFRPokgkaNRPoogkaVRPosgkadRPowgkalRPo0gkatRPo4gka1RPo8gka9RPoAgoaFRToEgoaNRToIgoaVRToMgoadRToQgoalRToUgoatRToYgoa1RTocgoa9RToggoaFRXokgoaNRXoogoaVRXosgoadRXowgoalRXo0goatRXo4goa1RXo8goa9RXoAgtYhYWfFDDlyGIC3iQdQhE/qJeWhr70vRBSKDDbKDsSqPTBRKUeV7a5ajqf5e9m/SKZaUMnPuUVkjwqIkx5Tv/63cHBg053+jUQdRPMjw3f9g2RsS/xk7p7C6dll7fsztsGk2RDiD81Ed2gnomxHt2natT9VKNcRvEQqpZ9bdSjr3vgMSGzYOwL9W6tP5GZ/gQFhTPCxgusuWlTj7Hq8ngAQ3DaGbOlXYEEHjq2nTFRC4F+huY2jv089gOY12/UdCpg7j33qmt3ed3+2/M64203B9IR7KWdTpM9m/Pc3jg1k5ytcYOMi7l97uYSBYTz+klakwokzVFZ0SiCoulaZCOZ+PfU0gLNdpgsMv0Sk3nI9thLHk/U7D+qJwEue9iZ8zeYDjuPNvDSL2gEymj6l/jHL3Dvi4y17D3agM2sJFoZSqBXWTwq/EQ9kBpPswILVOE/CO9Z5+3LZ+rtHf1e+iQ1b6GKHPdf6LfHnvUhjlkb+0D0ubeBCRBDPlW/HjDeIVFvsakq2DhlrdUrpNkk1DlTF8WRhGXtXmTeMAPlbhrdRTkMI3+l8QpyViSxeng/n3Xers5byCwFxa21cXKq+71s43LF5C2M1kLnbT9KR/KhGTq5X6iHw3hs+CpYeoBnrfBD8KLUS7OqoJdwv+JtjjOhlidTBWAw9rbws28KXwlvkGV3K4vO45yTXJ3OWfFn1HgR6gHg3/6yuvpUQ3VOmoZ41e5SqxWb6d9PtDhHQZ2rN/xikH1/gHEWZ9NBAf7d4rsvltaa/yfi8cXly5W1VysvT79Z+u7b6v9LfL7wh4U/Lny9sLbwl4XvFvYWugsXC8FCuPD9wt8W/r72/do/1v659i/T9EefVX1+v+D8rP37fxzMXXU= T r a n s f or m Pa r t C a p s u l e Decoder . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . v j q AAAyD3iclVvbctvIEdXmulFuu8ljXlCRXbtJySrJ3qrs4+p+oyRK1N20XSDYBGHhZswQlMxi/mFfkw/JWyqv+YT8Rr4gPTMYdA8EeSuqsoQ+Z6Yxl9PTTRAe5HEk5Orqfz770Y9/8tOf/fzzXyz+8le//s1vv/jyd5cimxQBXARZnBXXA19AHKVwISMZw3VegJ8MYrga3G0q/qqEQkRZei4fcniT+GEajaLAlwhd9cvy3Ye37999sbS6sqp/vMcXa9XF0kL103335ep/+8MsmCSQyiD2hXi9tprLNzO/kFEQw3yxPxGQ+8GdH8JrvEz9BMSbmR7v3HuOyNAbZQX+S6WnUd5j5idCPCQDbJn4ciyanALbuNcTOfr2zSxK84mENDA3Gk1iT2aemrw3jAoIZPyAF35QRDhWLxj7hR9IXCLnLoPEmcNMRjiB+eLic/XjHW9feUfr53ve1vbO/vH++f7Jcc/T1GLbWJfxr5qpWFZuF597R35x5wkcCu6B8LKRF/i5uVaLUsAIiiJKQzXuYVRGwjYbReGkABxpCtMgSxI/Hc76CMYwkvPZrA+J93UHr/80nz9qE+BWQWFbbWqrrV0RhePa2Zky2lrJLLdtzrO8rcUgkzJLbKMNbT1qV83bt838p1oMbIvBUy0C2yJ4qsXQthiqFrgNezi7WM3Q8z1sr3QBIwykoYdrk7g+8FqB89drb9DLYOQtrSkn6GVHb4rZNVQdLHtxNoXiRYBhubLYR5d6WWG0tDYzG/jXPloz7aCtOw43kn684u2gGITEmFJ7L9SOIW887liPO02PmpbTzN5z6WV1V+HZRh7OqDJe2h4fJv6Quiy9WvrmUbfluo+9esVdfaOn0zOq/uRyoPLN4KsQcNajxYFdENO7Z3v3Wnqf2V465qdZHWUr9cKYuwu9MnUMPrE0TYfjAqDpkvlbevXYI60a8/3qsW8/9QA3QXVuWTL4YOZsmzw9acfPJM+h8JQf42a7crPd5mbdK/wprXvD2YsXL/wyi4beRKijKRp5eSZEhInGuM5jH0On8v/06NSBm2MktcxRMaZ71eb/nmTlaLN2tPmDjnDOaQj6DDZthfGh4XpEKBVLW1cvXjwpExydH4cZJphx0jJP5Mzo6kafnChz9Wim69bVeosrK3h7P5xE7evTh8G502n9Bzs9WtQcD61q5kx9CjXDVVef2hTTv6nebt2/6/a3M61vgKNW108OuBIcRLESa6wu8EDHBuqq8jeKs6zQtL4yvL6sGiA1SGZrzWwjCwyE+ayvMn/gx7OtZoPSj6Mhb/DOXBfJzFDzRy5ByPYOmpnXM4JcqByXiyjO0io/naGLLPFKv4h8jFarb5D+THm+l2lWJOj1WR+hZ3O7nEWD9okZuMyAmMBlAmKGLjMkBlwGiBm5zIiY0GVCYsYuMyYmcpmImPcu856YO5e5IyZ2mXiuZVwkXiQwYrEEHz6ow87s4LL3fiKkN8zSr6SnamGU44M6eZyN8ZLKd+r6TumumctkxOQukxPzwWU+EFO4TEGMcBlBjHQZSczEZSbElC5TEjN1mSkx9y5zT8yDyzwQ89FlPs5NmWcDADNzVh/vZRUkMxNKgxELm3rccmyixLbQNuMZx+EBwSw2yoBgFhjlkGAWFSUQzEKiHBHM4qEMCWbBUI4JZpFQTghmYVC+J5jFQHlHMAuAMiY4ZnBCcMJgttB8hTOCmZjLnGCm5PIDwUzGZUEw03ApCBZ8UwmW7WvCpVsSzHRbTglmoi3vCWaKLR8IZnItPxJstbodg/pMrT/tFS26BSO61nMZjPJaT2Yw8ms9m8FosPV0BiPE1vMZjBpbT2gwkmw9o8HosvWURu7JcxqMQltPajAybT2rwWi1eVpbLnG5hHNPnsRgpNt6FoPRb+tpDEbErecxGCW3nshg5Nx6JoPRdOupDEbYrecyGHW3nsxgJN56NoPReevpDEbsreczGMU/fUJjLBRRUFcoyTrFxzqFTbJB8AaDNwneZPAWwVsM3iZ4m8E7BO8weJfgXQbvEbzH4H2C9xl8QPABgw8JPmRwh+AOg48IPmLwMcHHDD4h+ITBXYK7DD4l+JTBZwSfMbhHcI/B5wSfM/iC4AsGXxJ8yeArgq8YfE3wNYNvCL5h8C3Bt08fr67owKiOaXSd6VdLj3EbnNt0uU3ObbncFue2XW6bczsut8O5XZfb5dyey+1xbt/l9jl34HIHnDt0uUPOdVyuw7kjlzvi3LHLHXPuxOVOONd1uS7nTl3ulHNnLnfGuZ7L9Th37nLnnLtwuQvOXbrcJeeuXO6Kc9cud825G5e74dyty1nZX/ISovwI+nMEfnZdrfuWWQoz+3nWYsnEQP2EkkZdEyvcrYfLCmbIwCBUh+gqBBGqPnTtgQjVHGU1Eqo0dJ2BCNUXurpAhKoKXVMgQrWEriQQoQpC1w+IUN2gqwZEqFrQtQIiMVsHg1BloOsCRFK2fgahKkDXAIhQ7teZHxHK+DrfI0J5Xmd5RARbcINQTi+rbWGbUhqE8rfO3ohQ1tY5GxHK1TpTI0IZWudnRNqqUbcMLf04H6v91n9rBZaDShxaFxakj1r0ZKKiYj8ZDFUPc0FElkCocP2XYC1JJUcLoENE8DdBIgoT1VX/JdgKtxJtPZHZjI9/psRqLRRrQBYKdcgmNVMCtRYKdEQWijMkC4U5JguHy8aKgnxPForxjq3NTImwnvlMCdBauJhsFVF8GVuSmRKdtVB0H8hCwRVspWZKaPUCzZTIrIULzZYZBVaSheKakoXCuicLRfVAFgrq47z6zgvz7L3BdY5FnVFu1ZkVEcqoOp8iQnlUZ1FEKHvq3IkI5UydMRGhTKnzJCKUH3V2RISyos6JiFAu1JkQEcqAOv8hQnlPZz1EKNvpXIcI5Tid4RChzKbzGiKUz3Q2Q4SymM5hiFDu0pkLEcpYOl8hQnlKZylEKDvp3IQI5SSdkRChTKTzECKUf3T2QYSyjs45iFCu0ZkGkVu2g5QXBjwtJN1xdRD38Yqtng19xXSq8K8nV8Ww4nomjrWKziEV6sviLQhivwAU1XhdnUB4R1PsiVGkHpVCGmTDKA3RmT+JFSJG9XUynwn1lLcH8ikHgywe/pCbwf0cg7D5pDYV+jtCkzcrf/opdTU1aerLVDD1yw2Lkf7lpsUoAuSWxSgG5LbFKArkjsUoDuSuxSgS5J7FKBbkvsUoGuSBxSge5KHFKCJkx2IUE/LIYhQV8thiFBfyxGIUGbJrMYoNeWoxig55ZjGKD9mzGEWIPLcYxYi8sBhFiby0GMWJvLIYRYq8thjFiryxGEWLvLWYqchQyLuFn48NG9rPuYHzcSPcYDDpItxkMEkj3GIwqSPcZjAJJNxhMGkk3GUwySTcYzApJdxnMIklPGAw6SU8ZDBJJuwwmFQTHjGYhBMeM5i0E54wmOQTdhlMCgpPGUwiCs8YTDoKewwmKYXnDCY1hRcMJkGFlwwmTYVXDCZZhdcMJmWFNwwmcYW3DLYVPx5tVakm6qcoAyYusUEoaUtsEkrSEluEamU997b0NxkTAZ7vCZAe3jqGobe97A0g8BUux5HwptkkHiKEFnhCf++BteSk8NTbPVmMjtT7LnCfY22pv8y1X6nv0B1JnWKXUBKn2COUtCn2CSVpigNCSZnikFASpugQSroUR4SSLMUxoaRKcUIoiVJ0CSVNilNCSZLijFBSpOgRSoIU54SSHsUFoSRHcUkoqVFcEUpiFNeEkhbFDaEkRXFLaP3IJcW6D/RHCN88bKmKQKAKoOMW/6o8XCcLpbpBFkp0kyyU5hZZeNhtk4Ui2iELxbNLFopmjywUyz5ZKJIDslAch2ShKDpkoRiOyEIRHJOFm39CFm56lyzc7FOycJPPyMLN7ZGFm3pOFm7mBVm4iZdk4eZdkYWbdk0WbtYNWbhJt+x+VaVVVVlqy4BvmTQVFx4pKn71C3sYxAZd9qaRHGcT6WG5400xpeVQuAURUEXkVEPV7WWtAd3wUSEIulyCRr0EumCCRsUEumSCRs0EumiCRtUEumyCRt0EunCCRuUEunSCRu0EuniCRvUEunyCRv0EuoCCRgUFuoSCRg0FuoiCRhUFuoyCRh0FupCCRiUFupSCRi0FupiCRjUFupyCRj0FuqCCRkUFuqSCRk0FuqiCRlUFuqyCRl0FurCCRmUFurSCRm0FuriCRnUFuryCRn0FusACVmHhJwVMObKYgDdJh1DED+qlpaEvfS+EFArMNsqOBCp9MFGpx5VtrprOZ/m7Wb9IZtrQiU95hSSPighTntO/fndw8KDTnX4NRN0E82PDt31DZOxL/KTu3sJp2eUtu/O2wSTZEOJPTUQ3qGdirEf3qRp1P9Uol1E8hKplXxv16OseeEzILBj7Qr1b609kpj9BQeGMsPECa27a1GOsujwewBCcdsZsaVcggYeObWdM1EKgn6G5jWM/j/0A5vUbNZ0KmHvPveraXV63//a8znjbzYF0BHtpp9Nkz+Y8tzdOzSRna9wg42Jun7u5RAHhvH6S1qQCSXNUVjSKoGi6FtlIJv49tbRAsx0mi0y/xGQesj32kscTNfuP6kmAyx525vwNpsPOow289AsagTKa/iX+8Qvc+yJjLXuPNmAzK4lWhhLoVRaPCj9RD6TG06zAAlX4D8J71nn78pl6e0e/lz5JzVuoIsf9F/rtsWd9iGPWxj4Qfe5tYALEkE/VrweMd0jUW2yqCjZOWWv1Cmk2CXXO1EVxJGFZuxeZN8xAuZtGd1EOw8hfabyCnBVJrB7ez2edt6vzFjJLQXFrbZyc6n4v27hcMXkLo7XQeduP0pF8aIZO7hfq4TAeG74Klh7gWSv8ELwo9dKsKugl3K94m+NMqOXJVAEYjL0t/OybwlfCG2TZ3cqi8zjnJFenc1b8GTVehHoA+Le/rK4+1VCdk6YhXrW71GrFZvr3Ey3OUVDn6g2/GGTfH2Ccxdl0UIB/t/jui6W15v+JeHxx+XJl7dXKy9Nvlr77tvr/Ep8v/GHhjwtfL6wt/GXhu4W9he7CxUKwcLfw/cLfFv6+9v3aP9b+ufYv0/RHn1V9fr/g/Kz9+38s2l9c v j q AAAyD3iclVvbctvIEdXmulFuu8ljXlCRXbtJySrJ3qrs4+p+oyRK1N20XSDYBGHhZswQlMxi/mFfkw/JWyqv+YT8Rr4gPTMYdA8EeSuqsoQ+Z6Yxl9PTTRAe5HEk5Orqfz770Y9/8tOf/fzzXyz+8le//s1vv/jyd5cimxQBXARZnBXXA19AHKVwISMZw3VegJ8MYrga3G0q/qqEQkRZei4fcniT+GEajaLAlwhd9cvy3Ye37999sbS6sqp/vMcXa9XF0kL103335ep/+8MsmCSQyiD2hXi9tprLNzO/kFEQw3yxPxGQ+8GdH8JrvEz9BMSbmR7v3HuOyNAbZQX+S6WnUd5j5idCPCQDbJn4ciyanALbuNcTOfr2zSxK84mENDA3Gk1iT2aemrw3jAoIZPyAF35QRDhWLxj7hR9IXCLnLoPEmcNMRjiB+eLic/XjHW9feUfr53ve1vbO/vH++f7Jcc/T1GLbWJfxr5qpWFZuF597R35x5wkcCu6B8LKRF/i5uVaLUsAIiiJKQzXuYVRGwjYbReGkABxpCtMgSxI/Hc76CMYwkvPZrA+J93UHr/80nz9qE+BWQWFbbWqrrV0RhePa2Zky2lrJLLdtzrO8rcUgkzJLbKMNbT1qV83bt838p1oMbIvBUy0C2yJ4qsXQthiqFrgNezi7WM3Q8z1sr3QBIwykoYdrk7g+8FqB89drb9DLYOQtrSkn6GVHb4rZNVQdLHtxNoXiRYBhubLYR5d6WWG0tDYzG/jXPloz7aCtOw43kn684u2gGITEmFJ7L9SOIW887liPO02PmpbTzN5z6WV1V+HZRh7OqDJe2h4fJv6Quiy9WvrmUbfluo+9esVdfaOn0zOq/uRyoPLN4KsQcNajxYFdENO7Z3v3Wnqf2V465qdZHWUr9cKYuwu9MnUMPrE0TYfjAqDpkvlbevXYI60a8/3qsW8/9QA3QXVuWTL4YOZsmzw9acfPJM+h8JQf42a7crPd5mbdK/wprXvD2YsXL/wyi4beRKijKRp5eSZEhInGuM5jH0On8v/06NSBm2MktcxRMaZ71eb/nmTlaLN2tPmDjnDOaQj6DDZthfGh4XpEKBVLW1cvXjwpExydH4cZJphx0jJP5Mzo6kafnChz9Wim69bVeosrK3h7P5xE7evTh8G502n9Bzs9WtQcD61q5kx9CjXDVVef2hTTv6nebt2/6/a3M61vgKNW108OuBIcRLESa6wu8EDHBuqq8jeKs6zQtL4yvL6sGiA1SGZrzWwjCwyE+ayvMn/gx7OtZoPSj6Mhb/DOXBfJzFDzRy5ByPYOmpnXM4JcqByXiyjO0io/naGLLPFKv4h8jFarb5D+THm+l2lWJOj1WR+hZ3O7nEWD9okZuMyAmMBlAmKGLjMkBlwGiBm5zIiY0GVCYsYuMyYmcpmImPcu856YO5e5IyZ2mXiuZVwkXiQwYrEEHz6ow87s4LL3fiKkN8zSr6SnamGU44M6eZyN8ZLKd+r6TumumctkxOQukxPzwWU+EFO4TEGMcBlBjHQZSczEZSbElC5TEjN1mSkx9y5zT8yDyzwQ89FlPs5NmWcDADNzVh/vZRUkMxNKgxELm3rccmyixLbQNuMZx+EBwSw2yoBgFhjlkGAWFSUQzEKiHBHM4qEMCWbBUI4JZpFQTghmYVC+J5jFQHlHMAuAMiY4ZnBCcMJgttB8hTOCmZjLnGCm5PIDwUzGZUEw03ApCBZ8UwmW7WvCpVsSzHRbTglmoi3vCWaKLR8IZnItPxJstbodg/pMrT/tFS26BSO61nMZjPJaT2Yw8ms9m8FosPV0BiPE1vMZjBpbT2gwkmw9o8HosvWURu7JcxqMQltPajAybT2rwWi1eVpbLnG5hHNPnsRgpNt6FoPRb+tpDEbErecxGCW3nshg5Nx6JoPRdOupDEbYrecyGHW3nsxgJN56NoPReevpDEbsreczGMU/fUJjLBRRUFcoyTrFxzqFTbJB8AaDNwneZPAWwVsM3iZ4m8E7BO8weJfgXQbvEbzH4H2C9xl8QPABgw8JPmRwh+AOg48IPmLwMcHHDD4h+ITBXYK7DD4l+JTBZwSfMbhHcI/B5wSfM/iC4AsGXxJ8yeArgq8YfE3wNYNvCL5h8C3Bt08fr67owKiOaXSd6VdLj3EbnNt0uU3ObbncFue2XW6bczsut8O5XZfb5dyey+1xbt/l9jl34HIHnDt0uUPOdVyuw7kjlzvi3LHLHXPuxOVOONd1uS7nTl3ulHNnLnfGuZ7L9Th37nLnnLtwuQvOXbrcJeeuXO6Kc9cud825G5e74dyty1nZX/ISovwI+nMEfnZdrfuWWQoz+3nWYsnEQP2EkkZdEyvcrYfLCmbIwCBUh+gqBBGqPnTtgQjVHGU1Eqo0dJ2BCNUXurpAhKoKXVMgQrWEriQQoQpC1w+IUN2gqwZEqFrQtQIiMVsHg1BloOsCRFK2fgahKkDXAIhQ7teZHxHK+DrfI0J5Xmd5RARbcINQTi+rbWGbUhqE8rfO3ohQ1tY5GxHK1TpTI0IZWudnRNqqUbcMLf04H6v91n9rBZaDShxaFxakj1r0ZKKiYj8ZDFUPc0FElkCocP2XYC1JJUcLoENE8DdBIgoT1VX/JdgKtxJtPZHZjI9/psRqLRRrQBYKdcgmNVMCtRYKdEQWijMkC4U5JguHy8aKgnxPForxjq3NTImwnvlMCdBauJhsFVF8GVuSmRKdtVB0H8hCwRVspWZKaPUCzZTIrIULzZYZBVaSheKakoXCuicLRfVAFgrq47z6zgvz7L3BdY5FnVFu1ZkVEcqoOp8iQnlUZ1FEKHvq3IkI5UydMRGhTKnzJCKUH3V2RISyos6JiFAu1JkQEcqAOv8hQnlPZz1EKNvpXIcI5Tid4RChzKbzGiKUz3Q2Q4SymM5hiFDu0pkLEcpYOl8hQnlKZylEKDvp3IQI5SSdkRChTKTzECKUf3T2QYSyjs45iFCu0ZkGkVu2g5QXBjwtJN1xdRD38Yqtng19xXSq8K8nV8Ww4nomjrWKziEV6sviLQhivwAU1XhdnUB4R1PsiVGkHpVCGmTDKA3RmT+JFSJG9XUynwn1lLcH8ikHgywe/pCbwf0cg7D5pDYV+jtCkzcrf/opdTU1aerLVDD1yw2Lkf7lpsUoAuSWxSgG5LbFKArkjsUoDuSuxSgS5J7FKBbkvsUoGuSBxSge5KHFKCJkx2IUE/LIYhQV8thiFBfyxGIUGbJrMYoNeWoxig55ZjGKD9mzGEWIPLcYxYi8sBhFiby0GMWJvLIYRYq8thjFiryxGEWLvLWYqchQyLuFn48NG9rPuYHzcSPcYDDpItxkMEkj3GIwqSPcZjAJJNxhMGkk3GUwySTcYzApJdxnMIklPGAw6SU8ZDBJJuwwmFQTHjGYhBMeM5i0E54wmOQTdhlMCgpPGUwiCs8YTDoKewwmKYXnDCY1hRcMJkGFlwwmTYVXDCZZhdcMJmWFNwwmcYW3DLYVPx5tVakm6qcoAyYusUEoaUtsEkrSEluEamU997b0NxkTAZ7vCZAe3jqGobe97A0g8BUux5HwptkkHiKEFnhCf++BteSk8NTbPVmMjtT7LnCfY22pv8y1X6nv0B1JnWKXUBKn2COUtCn2CSVpigNCSZnikFASpugQSroUR4SSLMUxoaRKcUIoiVJ0CSVNilNCSZLijFBSpOgRSoIU54SSHsUFoSRHcUkoqVFcEUpiFNeEkhbFDaEkRXFLaP3IJcW6D/RHCN88bKmKQKAKoOMW/6o8XCcLpbpBFkp0kyyU5hZZeNhtk4Ui2iELxbNLFopmjywUyz5ZKJIDslAch2ShKDpkoRiOyEIRHJOFm39CFm56lyzc7FOycJPPyMLN7ZGFm3pOFm7mBVm4iZdk4eZdkYWbdk0WbtYNWbhJt+x+VaVVVVlqy4BvmTQVFx4pKn71C3sYxAZd9qaRHGcT6WG5400xpeVQuAURUEXkVEPV7WWtAd3wUSEIulyCRr0EumCCRsUEumSCRs0EumiCRtUEumyCRt0EunCCRuUEunSCRu0EuniCRvUEunyCRv0EuoCCRgUFuoSCRg0FuoiCRhUFuoyCRh0FupCCRiUFupSCRi0FupiCRjUFupyCRj0FuqCCRkUFuqSCRk0FuqiCRlUFuqyCRl0FurCCRmUFurSCRm0FuriCRnUFuryCRn0FusACVmHhJwVMObKYgDdJh1DED+qlpaEvfS+EFArMNsqOBCp9MFGpx5VtrprOZ/m7Wb9IZtrQiU95hSSPighTntO/fndw8KDTnX4NRN0E82PDt31DZOxL/KTu3sJp2eUtu/O2wSTZEOJPTUQ3qGdirEf3qRp1P9Uol1E8hKplXxv16OseeEzILBj7Qr1b609kpj9BQeGMsPECa27a1GOsujwewBCcdsZsaVcggYeObWdM1EKgn6G5jWM/j/0A5vUbNZ0KmHvPveraXV63//a8znjbzYF0BHtpp9Nkz+Y8tzdOzSRna9wg42Jun7u5RAHhvH6S1qQCSXNUVjSKoGi6FtlIJv49tbRAsx0mi0y/xGQesj32kscTNfuP6kmAyx525vwNpsPOow289AsagTKa/iX+8Qvc+yJjLXuPNmAzK4lWhhLoVRaPCj9RD6TG06zAAlX4D8J71nn78pl6e0e/lz5JzVuoIsf9F/rtsWd9iGPWxj4Qfe5tYALEkE/VrweMd0jUW2yqCjZOWWv1Cmk2CXXO1EVxJGFZuxeZN8xAuZtGd1EOw8hfabyCnBVJrB7ez2edt6vzFjJLQXFrbZyc6n4v27hcMXkLo7XQeduP0pF8aIZO7hfq4TAeG74Klh7gWSv8ELwo9dKsKugl3K94m+NMqOXJVAEYjL0t/OybwlfCG2TZ3cqi8zjnJFenc1b8GTVehHoA+Le/rK4+1VCdk6YhXrW71GrFZvr3Ey3OUVDn6g2/GGTfH2Ccxdl0UIB/t/jui6W15v+JeHxx+XJl7dXKy9Nvlr77tvr/Ep8v/GHhjwtfL6wt/GXhu4W9he7CxUKwcLfw/cLfFv6+9v3aP9b+ufYv0/RHn1V9fr/g/Kz9+38s2l9c perturb Multi- View Agr ee m en t … … v j f AAAyKniclVvbctzGEaVzdZg4sZPHvKBCqeykKJZWclX8aN5JcUku7xetpMJie7EQcRNmFktqa/MPeU1+IV+TN1de8yHpmcGge7CgXGGVRcw5gwZm5vT0AQgP8jgS8vnzHz77yU9/9vNf/PLzXy3/+jdf/PZ3X371+0uRTYoALoIszorrgS8gjlK4kJGM4TovwE8GMVwN7jYVf1VCIaIsPZcPObxJ/DCNRlHgS4Su+mX5bvT2/bsvV56vPdc/3uJBpzpYWap+eu++6nzRH2bBJIFUBrEvxOvO81y+mfmFjIIY5sv9iYDcD+78EF7jYeonIN7M9P3OvaeIDL1RVuB/qfQ0ys+Y+YkQD8kAeya+HIsmp8A27vVEjr57M4vSfCIhDcyFRpPYk5mnBu8NowICGT/ggR8UEd6rF4z9wg8kTpFzlUHijGEmIxzAfHn5qfrxjravvMP18z1va3tn/2j/fP/46MzT1HLbva7ibzVSsarCLj/1Dv3izhN4K7gGwstGXuDn5lhNSgEjKIooDdV9D6MyErbbKAonBeCdpjANsiTx0+Gsj2AMIzmfzfqQeN908fjP8/lCnwCXCgrba1O32voVUTiug52qRlsvmeW2z3mWt/UYZFJmie20oVsL/apx+7ab/1iPge0xeKxHYHsEj/UY2h5D1QOXYQ9HF6sRer6H/ZUuYISJNPRwbhI3Bh4rcP668wajDEbeSkcFwSg7elHMqqHqYNWLsykUzwJMy7XlPobU0wqjlc7MLODf+tia6QBtp+PtRtKP17wdFIOQmFNq7YVaMeRNxB0bcacZUdNymtlrrryorio828nDEVWNF/aMDxN/SKesvFz5duG01foce/SSh/pWD+fMqPqT04HKNzdfpYAzHy0B7ISYs8/s2WctZ5/as3TOT7M6y9bqiTFXF3pm6hx8ZGqaAccFQDMki7fycjEizRqL/XIxtp96gIugTm6ZMvhgxmy7PD5oJ84kz6HwVBwTZrsKs90WZt0r/CnNeyPYs2fP/DKLht5EqK0pGnl5JkSEhcaEzmMfU6eK//jdqQ03x0xqGaNizOlVn/97kFWgzTrQ5o8GwjGnIeg92PQVJoaG6ztCqVjahnr27FGZ4N35cZhhgRknLeNEztxd3emTA2WhFka6bkOtt4SygrfXw0HUsT69GZw7J63/6EkLk5rjplWNnKlPoeZ21dGnFsWc31Rvrz6/555vR1pfAO9aHT96w5XgIIqVWGN1gBs6dlBHVbxRnGWFpvWR4fVh1QGpQTLrNKuNLDAR5rO+qvyBH8+2mh1KP46GvMM7c1wkM0PNF0KCkO0naGZejwhyoWpcLqI4S6v6dIohssQr/SLyMVutvkH6MxX5XqZZkWDUJ32EnsztdBYN2idm4DIDYgKXCYgZusyQGHAZIGbkMiNiQpcJiRm7zJiYyGUiYt67zHti7lzmjpjYZeK5lnGReJHAjEULPnxQm51ZwVXv/URIb5ilX0tPeWGU44PaeZyF8ZIqdurGTumqmctkxOQukxPzwWU+EFO4TEGMcBlBjHQZSczEZSbElC5TEjN1mSkx9y5zT8yDyzwQ89FlPs6NzbMJgJU5q7f3skqSmUmlwYilTX3fcmyyxPbQbcYzjsMDgllulAHBLDHKIcEsK0ogmKVEOSKY5UMZEsySoRwTzDKhnBDM0qB8TzDLgfKOYJYAZUxwzOCE4ITBbKL5DGcEMzGXOcFMyeUHgpmMy4JgpuFSECz4ohIs2+eES7ckmOm2nBLMRFveE8wUWz4QzORafiTYanU7BvVMrZ/2ihbdghFd674MRnmtOzMY+bXuzWA02Lo7gxFi6/4MRo2tOzQYSbbu0WB02bpLI/foPg1Goa07NRiZtu7VYLTa3K0tl7hcwrlHd2Iw0m3di8Hot3U3BiPi1v0YjJJbd2Qwcm7dk8FounVXBiPs1n0ZjLpbd2YwEm/dm8HovHV3BiP21v0ZjOIf36ExF4ooqB1Ksk75sU5pk2wQvMHgTYI3GbxF8BaDtwneZvAOwTsM3iV4l8F7BO8xeJ/gfQa/IvgVgw8IPmBwl+Augw8JPmTwEcFHDD4m+JjBPYJ7DD4h+ITBpwSfMviM4DMGnxN8zuALgi8YfEnwJYOvCL5i8DXB1wy+IfiGwbcE3z6+vbqiA6M6ptF1pl8tPcZtcG7T5TY5t+VyW5zbdrltzu243A7ndl1ul3N7LrfHuX2X2+fcK5d7xbkDlzvgXNflupw7dLlDzh253BHnjl3umHM9l+tx7sTlTjh36nKnnDtzuTPOnbvcOecuXO6Cc5cud8m5K5e74ty1y11z7sblbjh363JW9pfcQpQfQT9H4LPr8/rcMkthZp9nLZZMDNRPqGiUIgoTv8L1MVHWLivKtcplBTNkYBCyKNqgIELGRNsSRMiOlNVNkgnRFgQRsh7aeCBChkPbDUTIZmiTgQiZC20tECFLoQ0FImQktI1AJGZTZBAyDdoyIJKyqTUIGQRtDxAhW6BNASJkBrQVQKRgM28QwSbcIFTuy2rF2HqVBqHSrgs7IlTQdTlHhMq4LuKIUPHWpRuRNqPqOtTSj/OxWm/9uxZnOajEoXVhQXoKo5cWFRX7yWCozjAHRGQJhArXvwnWalVKtQAGRAT/JciKtxKuha1wK9HWA5nN+P3PlFhtC8UaUAuFOmSDmimB2hYKdEQtFGdILRTmmFp4u+xeUZDvqYVivGNzM1MirEc+UwK0LZxMNosovoxNyUyJzrZQdB+ohYIr2EzNlNDqCZopkdkWTjSbZhRYSS0U15RaKKx7aqGoHqiFgvo4r/4chiX43uC6/KLOqOzqoosIFVtdahGhEqsLLCJUWHVZRYTKqS6miFAR1SUUESqdunAiQgVTl0tEqEzqIokIFUddGhGhkqgLIiJUCHUZRITKny5+iFDR0yUPESp1utAhQgVOlzdEqKzpooYIFTNdyhChEqYLGCJUuHTZQoTKlS5WiFCR0iUKESpNujAhQgVJlyNEqAzpIoTILVtBqgsDXhaS3rjaiPt4xGbPpr5iulX614NjBejMFiBU0TmkQv0deQuC2C8ARTVeVzsQXtH4QDGK1FtUSINsGKUhBvMnsULEqD5O5jOhXgCfgXwswCCLhz8WZnA/xyRsvsRNhf7zoSmpVTz9ArsamjTWMxVM/XLDYqR/uWkxygC5ZTHKAbltMcoCuWMxygO5azHKBLlnMcoFuW8xygb5ymKUD/LAYpQRsmsxygl5aDHKCnlkMcoLeWwxygzZsxjlhjyxGGWHPLUY5Yc8sxhliDy3GOWIvLAYZYm8tBjlibyyGGWKvLYY5Yq8sRhli7y1mDFrKOTdws/Hhg3tI3DgPImEGwwmXYSbDCZphFsMJnWE2wwmgYQ7DCaNhLsMJpmEewwmpYT7DCaxhK8YTHoJDxhMkgm7DCbVhIcMJuGERwwm7YTHDCb5hD0Gk4LCEwaTiMJTBpOOwjMGk5TCcwaTmsILBpOgwksGk6bCKwaTrMJrBpOywhsGk7jCWwbbhwHc2iqrJuoXLAMmLrFBKGlLbBJK0hJbhGplPfW29B85JgI83xMgPbx0DENve9UbQOArXI4j4U2zSTxECFvgCf0nEfSSk8JTH/5kMQZSn8LAfY7eUv+d1/61fYeuSOoUu4SSOMUeoaRNsU8oSVO8IpSUKQ4IJWGKLqGkS3FIKMlSHBFKqhTHhJIoRY9Q0qQ4IZQkKU4JJUWKM0JJkOKcUNKjuCCU5CguCSU1iitCSYzimlDSorghlKQobgmt38ak6PtAP0L45j1MZQKBHEDXNf/KHq5TC6W6QS2U6Ca1UJpb1MLNbptaKKIdaqF4dqmFotmjFopln1ooklfUQnEcUAtF0aUWiuGQWiiCI2rh4h9TCxe9Ry1c7BNq4SKfUgsX94xauKjn1MLFvKAWLuIltXDxrqiFi3ZNLVysG2rhIt2y61VOq3JZasmAL5k0jgu3FJW/+ls+TGKDrnrTSI6zifTQ7nhTLGk5FK4hAnJEjhuqLi9rDeiOC0YQtF2Chl8CbZig4ZhAWyZoeCbQpgkargm0bYKGbwJtnKDhnEBbJ2h4J9DmCRruCbR9goZ/Am2goOGgQFsoaHgo0CYKGi4KtI2Cho8CbaSg4aRAWyloeCnQZgoabgq0nYKGnwJtqKDhqEBbKmh4KtCmChquCrStgoavAm2soOGsQFsraHgr0OYKGu4KtL2Chr8CbbCAOSx8UsCSI4sJeJN0CEX8oL5nGvrS90JIocBqo9qRQKUPJqr0uLLNVdf5LH836xfJTDd04VNRIcmjIsKS55xff1Y4eNDlTn8hoi6C9bER2348MvYlPqm7l3B69njP3rztZpJsCPGnBqI71CMxrYXrVJ16n+qUyygeQtWzrxv13ddn4DYhs2DsC/XZrT+RmX6CgsK5w8a3rbnpU99jdcriDQzB6WeaLf0KJHDTsf1ME7UQ6HdobufYz2M/gHn9sU23AubeU686dqfXPX97Xle87eaNdAX7nqfbZE/nvLY3ds0kZ3PcIONibt+7uUQB4bx+k9akAkljVK1oFEHRDC2ykUz8e+ppgWY/LBaZ/r7JvGRbjJLHEzX6j+pNgMsedOf846aD7sICXvoF3YFqNONL/OUXuPZFxnqeLSzAZlYSrRpKoFdZPCr8RL2QGk+zAg2q8B+E96T79sUT9WGP/mR9kpoPVEWO6y/0h2VP+hDHrI99IfrU28ACiCmfqn8eMN8hUR+4KRdsgrLe6uvSbBLqmqlNcSRhVYcXmTfMQIWbRndRDsPIX2t8nZwVSaze689n3bfP5y1kloLiOm2cnOrzXrRxuWLyFkZrofu2H6Uj+dBMndwv1Mth3DZ8lSxngHut8EPwotRLs8rQS7hf8zbHmVDTkykDGIy9LXz2TeFr4Q2y7G5t2Xmdc5yr3Tkr/oIaL0J9A/i7v6qOPtVR7ZOmIx61h9RqxW7630d6nKOgztXHfzHIvj/APIuz6aAA/2753Zcrneb/LrF4cPlirfNy7cXJtyvff1f9rxSfL/1x6U9L3yx1lv669P3S3lJv6WIpWLpb+vvSP5b+2flX59+dHzr/MV1/8ll1zh+WnJ/Of/8HPllp7A== S AAAyCXiclVtbc9zKcaadOHGYODlOHvOCCqWy46JYonQqcd7MOykur8ubdKhzCovtxULETZhZkNTW5g/41f4heUvlNb8if8O/ID09GHQPCOqUWSUR/X0zjbl8Pd2LBUdlmij9+vX//eSnf/GXP/urv/753yz/7d/94u//4Ztf/uOVKmZVBJdRkRbVzShUkCY5XOpEp3BTVhBmoxSuR3dbhr+uoVJJkV/oxxI+ZmGcJ5MkCjVCZ8Mfvll5vfaafoKnF+vNxcpS83P6wy9f/+l2XESzDHIdpaFS362/LvXHeVjpJEphsXw7U1CG0V0Yw3d4mYcZqI9zGukieInIOJgUFf7LdUCo7DEPM6UesxG2zEI9VV3OgH3cdzM9+e3HeZKXMw15ZG80maWBLgIz7WCcVBDp9BEvwqhKcKxBNA2rMNK4ON5dRpk3h7lOcAKL5eWX5ic43rkOjjYu9oPtnd2D44OLg5PjYUDUct9YV/G3malaNW6XXwZHYXUXKBwKrr4KikkQhaW9NotSwQSqKsljM+5xUifKNZsk8awCHGkO91GRZWE+nt8imMJEL+bzW8iCXw/w+l8XiydtItwqqFyrLbL62lVJPG2dnRujr5UuStfmoij7WowKrYvMNdok60m7Zt6haxY+12LkWoyeaxG5FtFzLcauxdi0wG3Yx9mlZoZBGGB7owuYYAiNA1ybzPeB1wZcfLf+Eb2MJsHKunGCXnZpU+yuoepgNUiLe6heRRiQa8u36JKWFSYr63O7gf95i9acHPR1x+EmOkzXgl0Ug9IYU2bvldkx5K3HXedxt+uRaH1fuHuuvGnuqgLXKMAZNcYb1+PzLBxzl5W3K98+6bba9nFXb6Wrb2k6Q6vqry4HKt8OvgkBbz16HLgFsb2Hrvewp/e560Uxf1+0UbbWLoy9u6KVaWPwmaXpOpxWAF2Xwt/K26ceedWE77dPfYd5ALgJpnPPksFnO2fX5PlJe35mZQlVYPxYNzuNm50+NxtBFd7zunecvXr1KqyLZBzMlDmakklQFkolmGKs6zINMXQa/8+Pzhy4JUZSzxwNY7s3bf7sSTaOtlpHWz/qCOecx0BnsG2rrA+C2xGhVBztXL169axMcHRhGheYYKZZzzyRs6NrG311osLVk5luOFcbPa6c4N39cBKtr68fBhdep40f7fRkUUs8tJqZC/UZ1A7XXH1tU2z/rnpP2/6nfn830/YGOGpz/eyAG8FBkhqxpuYCD3RsYK4af5O0KCqi6crydNk0QGqUzde72UZXGAiL+a3J/FGYzre7DeowTcaywQ/2usrmllo8cQlK93cgZtHOCEplclypkrTIm/x0ji6KLKjDKgkxWp2+QYdz4/lB50WVodcXtwi9WLjlrDp0yMzIZ0bMRD4TMTP2mTEz4DPAzMRnJszEPhMzM/WZKTOJzyTMfPKZT8zc+cwdM6nPpAuScZUFicKIxeJ7/GgOO7uDq8GnmdLBuMh/pQNTC6McH83J421MkDW+c993znctfKZgpvSZkpnPPvOZmcpnKmaUzyhmtM9oZmY+M2Om9pmamXufuWfmwWcemHn0mUdmvvjMl4Ut81wAYGYu2uO9boJkbkNpNBFh045bT22UuBZkC15wEh4xLGKjjhgWgVGPGRZRUQPDIiTqCcMiHuqYYREM9ZRhEQn1jGERBvUnhkUM1HcMiwCoU4ZTAWcMZwIWCy1XuGBYiLkuGRZKrj8zLGRcVwwLDdeKYSU3lWHdvyZSujXDQrf1PcNCtPUDw0Kx9SPDQq71F4adVndSMJ+p6dNe1aNbsKLrPZfBKq/3ZAYrv96zGawGe09nsELsPZ/BqrH3hAYryd4zGqwue09p5J49p8EqtPekBivT3rMarFa7p7XjMp/LJPfsSQxWur1nMVj99p7GYEXcex6DVXLviQxWzr1nMlhN957KYIXdey6DVXfvyQxW4r1nM1id957OYMXeez6DVfzzJzTGQpVEbYWSbXB8bHDYZJsMbwp4i+EtAW8zvC3gHYZ3BLzL8K6A9xjeE/A+w/sCPmD4QMDvGH4n4EOGDwU8YHgg4COGjwR8zPCxgE8YPhHwKcOnAj5j+EzA5wyfC3jI8FDAFwxfCPiS4UsBXzF8JeBrhq8FfMPwjYDfM/xewB8Y/vD88eqLDqzqhEY3hH5JeoLblNyWz21JbtvntiW343M7ktv1uV3J7fncnuT2fW5fcgc+dyC5dz73TnKHPncouYHPDSR35HNHkjv2uWPJnfjcieROfe5Ucmc+dya5c587l9zQ54aSu/C5C8ld+tyl5K587kpy1z53Lbkbn7uR3Hufey+5Dz7nZH8lS4j6C9DnCPzs+rrtWxc5zN3nWYdlMwvdZpw02prY4H49XDewQEYW4TqEqhBEuPqg2gMRrjnqZiRcaVCdgQjXF1RdIMJVBdUUiHAtQZUEIlxBUP2ACNcNVDUgwtUC1QqIpGIdLMKVAdUFiORi/SzCVQDVAIhw7qfMjwhnfMr3iHCepyyPiBILbhHO6XWzLWJTaotw/qbsjQhnbcrZiHCupkyNCGdoys+I9FWjfhlah2k5NftNv1sF1qNGHKQLB/JHLX4y0VBpmI3Gpoe9YKLIIDY4/WaYJGnk6AB0iAj+z5BK4sx0pd8MO+E2om0nMp/L8c+NWJ2FYo3YQqGOxaTmRqDOQoFO2EJxxmyhMKds4XDFWFGQn9hCMd6JtZkbEbYznxsBOgsXU6wiiq8QSzI3onMWiu4zWyi4SqzU3AitXaC5EZmzcKHFMqPAarZQXPdsobAe2EJRPbKFgvqyaL7zwjz7YHHKsagzzq2UWRHhjEr5FBHOo5RFEeHsSbkTEc6ZlDER4UxJeRIRzo+UHRHhrEg5ERHOhZQJEeEMSPkPEc57lPUQ4WxHuQ4RznGU4RDhzEZ5DRHOZ5TNEOEsRjkMEc5dlLkQ4YxF+QoRzlOUpRDh7ES5CRHOSZSREOFMRHkIEc4/lH0Q4axDOQcRzjWUaRD5IHaQ88JIpoXsdNocxLd4JVbPhb5hBk34t5NrYthwQxvHpKILyJX5sngbojSsAEU13TAnEN7RFntqkphHpZBHxTjJY3QWzlKDqEl7nS3myjzlHYJ+zsGoSMc/5mb0sMAg7D6pzRV9R2jzZuOPnlI3U9O2vsyVUL/edBjrX285jCNAbzuMY0DvOIyjQO86jONA7zmMI0HvO4xjQR84jKNBv3MYx4M+dBhHhB44jGNCHzmMo0IfO4zjQp84jCNDnzqMY0OfOYyjQ587jONDDx3GEaIvHMYxoi8dxlGirxzGcaKvHcaRom8cxrGi3zuMo0V/cJityFDIe1VYTi0bu8+5kfdxI94UMOsi3hIwSyPeFjCrI94RMAsk3hUwayTeEzDLJN4XMCslPhAwiyV+J2DWS3woYJZMPBAwqyY+EjALJz4WMGsnPhEwyyc+FTArKD4TMIsoPhcw6ygeCpilFF8ImNUUXwqYBRVfCZg1FV8LmGUV3wiYlRW/FzCLK/4gYFfx49HWlGqqfYoyEuJSm4yyttQWoywttc0oKetlsE3fZMwUBGGgQAd46xTGwc5qMIIoNLieJiq4L2bpGCG0IFD0vQfWkrMqMG/3FCk6Mu+7wEOJtSV9meu+Ut/lO7I61R6jLE61zyhrUx0wytJU7xhlZapDRlmYasAo61IdMcqyVMeMsirVCaMsSnXKKGtSnTHKklTnjLIi1ZBRFqS6YJT1qC4ZZTmqK0ZZjeqaURajumGUtajeM8pSVB8YbR+55Fj3AX2ECO3DlqYIBK4ABn7xb8rDDbZQqptsoUS32EJpbrOFh90OWyiiXbZQPHtsoWj22UKxHLCFInnHForjkC0UxYAtFMMRWyiCY7Zw80/Ywk0/ZQs3+4wt3ORztnBzh2zhpl6whZt5yRZu4hVbuHnXbOGm3bCFm/WeLdykD+J+TaXVVFlmy0BumbYVFx4pJn7phT0MYouuBveJnhYzHWC5E9xjSiuh8gsi4IrIq4aa2+tWA9TwSSEIVC5Bp14CKpigUzEBlUzQqZmAiiboVE1AZRN06iagwgk6lRNQ6QSd2gmoeIJO9QRUPkGnfgIqoKBTQQGVUNCpoYCKKOhUUUBlFHTqKKBCCjqVFFApBZ1aCqiYgk41BVROQaeeAiqooFNRAZVU0KmpgIoq6FRVQGUVdOoqoMIKOpUVUGkFndoKqLiCTnUFVF5Bp74CKrBAVFj4SQFTjq5mEMzyMVTpo3lpaRzqMIghhwqzjbEThUofzUzq8WVbmqaLefnD/LbK5mRQ4jNeISuTKsGU5/Vv3x0cPVK6o9dAzE0wP3Z8uzdEpqHGT+r+LbyWp7Ll6aJvMFkxhvRrE6EG7Uys9eQ+TaPTrzUqdZKOoWl5S0Y7+rYHHhO6iKahMu/WhjNd0CcoqLwRdl5gLW2bdoxNl6cDGIPXzpo97Sok8NBx7ayJWojoGZrfOA3LNIxg0b5RM2iARfAyaK795fX77yzajLfTHchAiZd2Bl32fCFze+fUzEqxxh0yrRbuuZtPVBAv2idpXSrSPEdjJZMEqq5rVUx0Fj5wSwd022GyKOglJvuQ7amXMp2Z2X8xTwJ89nCwkG8wHQ6ebOBVWPEIjNH1r/FXWOHeV4VoOXyyAVtFzbQxjECvi3RShZl5IDW9LyosUFX4qIIXg+/fvDBv79B76bPcvoWqStx/RW+PvbiFNBVt3APRl8EmJkAM+dz894jxDpl5i81UwdapaG1eIS1mMeVMKooTDavkXhXBuADj7j65S0oYJ+Fa5xXkospS8/B+MR98/3rRQxY5GG69j9P31O9NH1capuxhSAuD72+TfKIfu6FThpV5OIzHRmiCZQh41qowhiDJg7xoCnoND2vB1rRQZnkKUwBG02AbP/vm8CsVjIribm3Ze5xzUprTuah+gxqvYhoA/r5dNVdfa2jOSdsQr/pdklqxGf3/TIsLFNSFecMvBX0bjjDO0uJ+VEF4t0x/JfEf5uff2r+JeHpx9WZt/e3at2ffrvzut83fS/x86Z+X/mXp10vrS/++9Lul/aXTpculaAmWfr/0h6U/rv9+/b/W/3v9f2zTn/6k6fNPS97P+v/+P5RPXMc= F AAAyCXiclVvbctzIkaW9ttfm2t7x+tEvCFMKX4JiiNLErv1m3kmxeb9KQ80EGp2NhoibUNUgqY7eH/Cr/SF+c/jVX+Hf8Bc4KwuFzAJBTZgREpHnVCXqcrIyGw0OyzRR+uXLf3znu//xve//4D9/+KPF//rxT37631/87H8uVTGtIriIirSoroehgjTJ4UInOoXrsoIwG6ZwNbzdMPxVDZVKivxcP5TwPgvjPBknUagROtn+5oullysv6Sd4fLHaXCwtND/H3/zs5T9vRkU0zSDXURoq9dXqy1K/n4WVTqIU5os3UwVlGN2GMXyFl3mYgXo/o5HOg+eIjIJxUeG/XAeEyh6zMFPqIRtiyyzUE9XlDNjHfTXV49+9nyV5OdWQR/ZG42ka6CIw0w5GSQWRTh/wIoyqBMcaRJOwCiONi+PdZZh5c5jpBCcwX1x8bn6Cw62r4GDtfDfY3NreO9w73zs6PAuIWuwb6zL+NjNVy8bt4vPgIKxuA4VDwdVXQTEOorC012ZRKhhDVSV5bMY9SupEuWbjJJ5WgCPN4S4qsizMR7MbBFMY6/lsdgNZ8OsBXv9mPn/UJsKtgsq12iCrr12VxJPW2akx+lrponRtzouyr8Ww0LrIXKN1sh61a+YdumbhUy2GrsXwqRaRaxE91WLkWoxMC9yGXZxdamYYhAG2N7qAMYbQKMC1yXwfeG3A+Ver79HLcBwsrRon6GWbNsXuGqoOloO0uIPqRYQBubJ4gy5pWWG8tDqzG/j/N2jNyEFfdxxuosN0JdhGMSiNMWX2XpkdQ9563HYet7seidZ3hbvn0qvmripwjQKcUWO8cj0+TsMRd1l6vfTlo27LbR939Vq6+pKmc2ZV/dnlQOXbwTch4K1HjwO3ILb3met91tP71PWimL8r2ihbaRfG3l3RyrQx+MTSdB1OKoCuS+Fv6fVjj7xqwvfrx77DPADcBNO5Z8ngo52za/L0pD0/07KEKjB+rJutxs1Wn5u1oArveN07zl68eBHWRTIKpsocTck4KAulEkwx1nWZhhg6jf+nR2cO3BIjqWeOhrHdmzb/9iQbRxuto41vdYRzzmOgM9i2VdYHwe2IUCqOdq5evHhSJji6MI0LTDCTrGeeyNnRtY0+O1Hh6tFM15yrtR5XTvDufjiJ1tfnD4Nzr9Pat3Z6tKglHlrNzIX6DGqHa64+tym2f1e9x23/Y7+/m2l7Axy1uX5ywI3gIEmNWFNzgQc6NjBXjb9xWhQV0XRlebpsGiA1zGar3WyjKwyE+ezGZP4oTGeb3QZ1mCYj2eAbe11lM0vNH7kEpfs7EDNvZwSlMjmuVEla5E1+OkUXRRbUYZWEGK1O36DDmfF8r/OiytDrsxuEns3dclYdOmRm6DNDZiKfiZgZ+cyIGfAZYGbsM2NmYp+JmZn4zISZxGcSZj74zAdmbn3mlpnUZ9I5ybjKgkRhxGLxPXowh53dweXgw1TpYFTkv9KBqYVRjg/m5PE2Jsga37nvO+e7Fj5TMFP6TMnMR5/5yEzlMxUzymcUM9pnNDNTn5kyU/tMzcydz9wxc+8z98w8+MwDM5985tPclnkuADAzF+3xXjdBMrOhNByLsGnHrSc2SlwLsgUvOAkPGRaxUUcMi8CoRwyLqKiBYRES9ZhhEQ91zLAIhnrCsIiEesqwCIP6A8MiBupbhkUA1CnDqYAzhjMBi4WWK1wwLMRclwwLJdcfGRYyriuGhYZrxbCSm8qw7l8TKd2aYaHb+o5hIdr6nmGh2PqBYSHX+hPDTqtbKZjP1PRpr+rRLVjR9Z7LYJXXezKDlV/v2QxWg72nM1gh9p7PYNXYe0KDlWTvGQ1Wl72nNHJPntNgFdp7UoOVae9ZDVar3dPacZnPZZJ78iQGK93esxisfntPY7Ai7j2PwSq590QGK+feMxmspntPZbDC7j2Xwaq792QGK/HesxmszntPZ7Bi7z2fwSr+6RMaY6FKorZCydY4PtY4bLJ1htcFvMHwhoA3Gd4U8BbDWwLeZnhbwDsM7wh4l+FdAe8xvCfgNwy/EfA+w/sCHjA8EPABwwcCPmT4UMBHDB8J+JjhYwGfMHwi4FOGTwV8xvCZgM8ZPhfwBcMXAr5k+FLAVwxfCfia4WsBv2X4rYDfMfzu6ePVFx1Y1QmNrgn9kvQEty65DZ/bkNymz21KbsvntiS37XPbktvxuR3J7frcruT2fG5Pcm987o3k9n1uX3IDnxtI7sDnDiR36HOHkjvyuSPJHfvcseROfO5Ecqc+dyq5M587k9y5z51L7sLnLiR36XOXkrvyuSvJXfvcteTe+txbyb3zOSf7S1lC1J+APkfgZ9eXbd+6yGHmPs86LJta6CbjpNHWxAb36+G6gQUytAjXIVSFIMLVB9UeiHDNUTcj4UqD6gxEuL6g6gIRriqopkCEawmqJBDhCoLqB0S4bqCqARGuFqhWQCQV62ARrgyoLkAkF+tnEa4CqAZAhHM/ZX5EOONTvkeE8zxleUSUWHCLcE6vm20Rm1JbhPM3ZW9EOGtTzkaEczVlakQ4Q1N+RqSvGvXL0DpMy4nZb/rdKrAeNuIgXTiQP2rxk4mGSsNsODI97AUTRQaxwek3wyRJI0cHoENE8H+GVBJnpiv9ZtgJtxFtO5HZTI5/ZsTqLBRrxBYKdSQmNTMCdRYKdMwWijNmC4U5YQuHK8aKgvzAForxVqzNzIiwnfnMCNBZuJhiFVF8hViSmRGds1B0H9lCwVVipWZGaO0CzYzInIULLZYZBVazheK6YwuFdc8WiuqBLRTUp3nznRfm2XuLU45FnXFupcyKCGdUyqeIcB6lLIoIZ0/KnYhwzqSMiQhnSsqTiHB+pOyICGdFyomIcC6kTIgIZ0DKf4hw3qOshwhnO8p1iHCOowyHCGc2ymuIcD6jbIYIZzHKYYhw7qLMhQhnLMpXiHCeoiyFCGcnyk2IcE6ijIQIZyLKQ4hw/qHsgwhnHco5iHCuoUyDyDuxg5wXhjItZMeT5iC+wSuxei70DTNowr+dXBPDhjuzcUwqOodcmS+LNyFKwwpQVJM1cwLhHW2xp8aJeVQKeVSMkjxGZ+E0NYgat9fZfKbMU94z0E85GBbp6NvcDO/nGITdJ7W5ou8Ibd5s/NFT6mZq2taXuRLq1+sOY/3rDYdxBOhNh3EM6C2HcRTobYdxHOgdh3Ek6F2HcSzoPYdxNOg3DuN40PsO44jQA4dxTOgDh3FU6EOHcVzoI4dxZOhjh3Fs6BOHcXToU4dxfOgzh3GE6HOHcYzoC4dxlOhLh3Gc6CuHcaToa4dxrOi3DuNo0e8cZisyFPJOFZYTy8buc27kfdyI1wXMuog3BMzSiDcFzOqItwTMAom3BcwaiXcEzDKJdwXMSon3BMxiid8ImPUS7wuYJRMPBMyqiQ8EzMKJDwXM2omPBMzyiY8FzAqKTwTMIopPBcw6is8EzFKKzwXMaoovBMyCii8FzJqKrwTMsoqvBczKit8KmMUVvxOwq/jxaGtKNdU+RRkKcal1RllbaoNRlpbaZJSU9TzYpG8ypgqCMFCgA7x1CqNgazkYQhQaXE8SFdwV03SEEFoQKPreA2vJaRWYt3uKFB2Z913gvsTakr7MdV+pb/MdWZ1qh1EWp9pllLWp9hhlaao3jLIy1T6jLEw1YJR1qQ4YZVmqQ0ZZleqIURalOmaUNalOGGVJqlNGWZHqjFEWpDpnlPWoLhhlOapLRlmN6opRFqO6ZpS1qN4yylJU7xhtH7nkWPcBfYQI7cOWpggErgAGfvFvysM1tlCq62yhRDfYQmlusoWH3RZbKKJttlA8O2yhaHbZQrHssYUiecMWimOfLRTFgC0UwwFbKIJDtnDzj9jCTT9mCzf7hC3c5FO2cHPP2MJNPWcLN/OCLdzES7Zw867Ywk27Zgs36y1buEnvxP2aSqupssyWgdwybSsuPFJM/NILexjEFl0O7hI9KaY6wHInuMOUVkLlF0TAFZFXDTW3160GqOGjQhCoXIJOvQRUMEGnYgIqmaBTMwEVTdCpmoDKJujUTUCFE3QqJ6DSCTq1E1DxBJ3qCah8gk79BFRAQaeCAiqhoFNDARVR0KmigMoo6NRRQIUUdCopoFIKOrUUUDEFnWoKqJyCTj0FVFBBp6ICKqmgU1MBFVXQqaqAyiro1FVAhRV0Kiug0go6tRVQcQWd6gqovIJOfQVUYIGosPCTAqYcXU0hmOYjqNIH89LSKNRhEEMOFWYbYycKlT6cmtTjy7Y0Teez8pvZTZXNyKDEZ7xCViZVginP69++Ozh8oHRHr4GYm2B+7Ph2b4hMQo2f1P1beC2PZcvjed9gsmIE6ecmQg3amVjr0X2aRsefa1TqJB1B0/KGjHb0bQ88JnQRTUJl3q0Np7qgT1BQeSPsvMBa2jbtGJsujwcwAq+dNXvaVUjgoePaWRO1ENEzNL9xGpZpGMG8faNm0ADz4HnQXPvL6/ffmrcZb6s7kIESL+0MuuzpXOb2zqmZlWKNO2Razd1zN5+oIJ63T9K6VKR5jsZKxglUXdeqGOssvOeWDui2w2RR0EtM9iHbYy9lOjWz/2SeBPjs/mAu32DaHzzawMuw4hEYo+tf46+wwr2vCtHy7NEGbBQ108YwAr0q0nEVZuaB1OSuqLBAVeGDCp4Nvn71zLy9Q++lT3P7Fqoqcf8VvT327AbSVLRxD0SfB+uYADHkc/PfA8Y7ZOYtNlMFW6eitXmFtJjGlDOpKE40LJN7VQSjAoy7u+Q2KWGUhCudV5CLKkvNw/v5bPD1y3kPWeRguNU+Tt9Rv1d9XGmYsochLQy+vknysX7ohk4ZVubhMB4boQmWM8CzVoUxBEke5EVT0Gu4Xwk2JoUyy1OYAjCaBJv42TeHX6lgWBS3K4ve45yj0pzORfVb1HgV0wDw982yufpcQ3NO2oZ41e+S1IrN6P8nWpyjoM7NG34p6JtwiHGWFnfDCsLbRforid+bn/9t/ybi8cXlq5XV1ytfnny59IffNX8v8cOFXyz8cuHXC6sL/7fwh4XdheOFi4VoARb+uPCnhT+v/nH1L6t/Xf2bbfrd7zR9fr7g/az+/V8O0Fy6 Q AAAyJHiclVvLctvIFdXkOVEyyUyyzAYV2TWTlKyy7Klkshu9JYuSKIl6mh4XCF6CsPAyuglKZjE/kG3yC/ma7FJZZJNvye1uNO5tEPJUVGULfU7jAt19bt9DEBrkcSTk8+f/+eQHP/zRj3/y009/tvzzX3z2y199/sWvL0U2KQK4CLI4K64HvoA4SuFCRjKG67wAPxnEcDW421L8VQmFiLK0Jx9yeJP4YRqNosCXCJ2evv185fnac/3jLR6sVwcrS9VP9+0X65/1h1kwSSCVQewL8Xr9eS7fzPxCRkEM8+X+REDuB3d+CK/xMPUTEG9m+k7n3lNEht4oK/BfKj2N8jNmfiLEQzLAnokvx6LJKbCNez2Ro2/ezKI0n0hIA3Oh0ST2ZOapYXvDqIBAxg944AdFhPfqBWO/8AOJk+NcZZA4Y5jJCAcwX15+qn68450r72ijt+9t7+weHB/0Dk6Ozz1NLbfd6yr+ViMVqyrs8lPvyC/uPIG3grMvvGzkBX5ujtWkFDCCoojSUN33MCojYbuNonBSAN5pCtMgSxI/Hc76CMYwkvPZrA+J91UHj38/ny/0CXCpoLC9tnSrrV8RheM62JlqtPWSWW779LK8rccgkzJLbKdN3VroV43bt938x3oMbI/BYz0C2yN4rMfQ9hiqHrgM+zi6WI3Q8z3sr3QBI0yhoYdzk7gx8FiB89frbzDKYOStrKsgGGVXL4pZNVQdrHpxNoXiWYAJubbcx5B6WmG0sj4zC/iXPrZmOkDb6Xi7kfTjNW8XxSAk5pRae6FWDHkTcddG3G1G1LScZvaaKy+qqwrPdvJwRFXjhT3j/cQf0ikrL1e+XjhttT7HHr3kob7Wwzk3qv7odKDyzc1XKeDMR0sAOyHm7HN79nnL2Wf2LJ3z06zOsrV6YszVhZ6ZOgcfmZpmwHEB0AzJ4q28XIxIs8Ziv1yM7ace4CKok1umDN6bMdsujw/aiTPJcyg8FceE2anC7LSF2fAKf0rz3gj27Nkzv8yioTcRamuKRl6eCRFhiTGh89jH1KniP353asPNMZNaxqgYc3rV5/8eZBVoqw609b2BcMxpCHoPNn2FiaHh+o5QKpa2oZ49e1QmeHd+HGZYYMZJyziRM3dXd/roQFmohZFu2FAbLaGs4O31cBB1rI9vBj3npI3vPWlhUnPctKqRM/Up1NyuOvrYopjzm+rt1ud33fPtSOsL4F2r40dvuBIcRLESa6wOcEPHDuqoijeKs6zQtD4yvD6sOiA1SGbrzWojC0yE+ayvKn/gx7PtZofSj6Mh7/DWHBfJzFDzhZAgZPsJmpnXI4JcqBqXiyjO0qo+nWGILPFKv4h8zFarb5D+TEW+l2lWJBj1SR+hJ3M7nUWD9okZuMyAmMBlAmKGLjMkBlwGiBm5zIiY0GVCYsYuMyYmcpmImHcu846YO5e5IyZ2mXiuZVwkXiQwY9F8Dx/UZmdWcNV7NxHSG2bpl9JTXhjl+KB2HmdhvKSKnbqxU7pq5jIZMbnL5MS8d5n3xBQuUxAjXEYQI11GEjNxmQkxpcuUxExdZkrMvcvcE/PgMg/EfHCZD3Nj82wCYGXO6u29rJJkZlJpMGJpU9+3HJsssT10m/GM4/CAYJYbZUAwS4xySDDLihIIZilRjghm+VCGBLNkKMcEs0woJwSzNCjfEcxyoLwjmCVAGRMcMzghOGEwm2g+wxnBTMxlTjBTcvmeYCbjsiCYabgUBAu+qATL9jnh0i0JZrotpwQz0Zb3BDPFlg8EM7mWHwi2Wt2JQX2m1p/2ihbdghFd674MRnmtOzMY+bXuzWA02Lo7gxFi6/4MRo2tOzQYSbbu0WB02bpLI/foPg1Goa07NRiZtu7VYLTa3K0tl7hcwrlHd2Iw0m3di8Hot3U3BiPi1v0YjJJbd2Qwcm7dk8FounVXBiPs1n0ZjLpbd2YwEm/dm8HovHV3BiP21v0ZjOIf36ExF4ooqB1KskH5sUFpk2wSvMngLYK3GLxN8DaDdwjeYfAuwbsM3iN4j8H7BO8z+IDgAwa/IvgVgw8JPmRwh+AOg48IPmLwMcHHDD4h+ITBXYK7DD4l+JTBZwSfMfic4HMG9wjuMfiC4AsGXxJ8yeArgq8YfE3wNYNvCL5h8C3Bt49vr67owKiOaXSD6VdLj3GbnNtyuS3ObbvcNud2XG6Hc7sut8u5PZfb49y+y+1z7sDlDjj3yuVece7Q5Q4513G5DueOXO6Ic8cud8y5E5c74VzX5bqcO3W5U86dudwZ585d7pxzPZfrce7C5S44d+lyl5y7crkrzl273DXnblzuhnO3Lmdlf8ktRPkB9OcI/Oz6vD63zFKY2c+zFksmBuonVDRKEYWJX+H6mChrlxXlWuWyghkyMAhZFG1QECFjom0JImRHyuomyYRoC4IIWQ9tPBAhw6HtBiJkM7TJQITMhbYWiJCl0IYCETIS2kYgErMpMgiZBm0ZEEnZ1BqEDIK2B4iQLdCmABEyA9oKIFKwmTeIYBNuECr3ZbVibL1Kg1Bp14UdESroupwjQmVcF3FEqHjr0o1Im1F1HWrpx/lYrbf+XYuzHFTi0LqwIH0Ko4cWFRX7yWCozjAHRGQJhArXvwnWalVKtQAGRAT/J8iKtxKuha1wK9HWA5nN+P3PlFhtC8UaUAuFOmSDmimB2hYKdEQtFGdILRTmmFp4u+xeUZDvqIVivGNzM1MirEc+UwK0LZxMNosovoxNyUyJzrZQdO+phYIr2EzNlNDqCZopkdkWTjSbZhRYSS0U15RaKKx7aqGoHqiFgvowr74OwxJ8b3BdflFnVHZ10UWEiq0utYhQidUFFhEqrLqsIkLlVBdTRKiI6hKKCJVOXTgRoYKpyyUiVCZ1kUSEiqMujYhQSdQFEREqhLoMIkLlTxc/RKjo6ZKHCJU6XegQoQKnyxsiVNZ0UUOEipkuZYhQCdMFDBEqXLpsIULlShcrRKhI6RKFCJUmXZgQoYKkyxEiVIZ0EULklq0g1YUBLwtJd1xtxH08YrNnU18xnSr968GxAnRuCxCqqAepUN8jb0MQ+wWgqMYbagfCKxofKEaReooKaZANozTEYP4kVogY1cfJfCbUA+BzkI8FGGTx8PvCDO7nmITNh7ip0F8fmpJaxdMPsKuhSWM9U8HULzctRvqXWxajDJDbFqMckDsWoyyQuxajPJB7FqNMkPsWo1yQBxajbJCvLEb5IA8tRhkhOxajnJBHFqOskMcWo7yQJxajzJBdi1FuyFOLUXbIM4tRfshzi1GGyJ7FKEfkhcUoS+SlxShP5JXFKFPktcUoV+SNxShb5K3FjFlDIe8Vfj42bGg/AgfOJ5Fwk8Gki3CLwSSNcJvBpI5wh8EkkHCXwaSRcI/BJJNwn8GklPCAwSSW8BWDSS/hIYNJMmGHwaSa8IjBJJzwmMGknfCEwSSfsMtgUlB4ymASUXjGYNJReM5gklLYYzCpKbxgMAkqvGQwaSq8YjDJKrxmMCkrvGEwiSu8ZbD9MIBbW2XVRP2AZcDEJTYJJW2JLUJJWmKbUK2sp962/pJjIsDzPQHSw0vHMPR2Vr0BBL7C5TgS3jSbxEOEsAWe0F+JoJecFJ568SeLMZB6FQbuc/SW+nte+237Ll2R1Cn2CCVxin1CSZvigFCSpnhFKClTHBJKwhQdQkmX4ohQkqU4JpRUKU4IJVGKLqGkSXFKKElSnBFKihTnhJIgRY9Q0qO4IJTkKC4JJTWKK0JJjOKaUNKiuCGUpChuCa2fxqTo+0B/hPDNc5jKBAI5gI5r/pU93KAWSnWTWijRLWqhNLephZvdDrVQRLvUQvHsUQtFs08tFMsBtVAkr6iF4jikFoqiQy0UwxG1UATH1MLFP6EWLnqXWrjYp9TCRT6jFi7uObVwUXvUwsW8oBYu4iW1cPGuqIWLdk0tXKwbauEi3bLrVU6rcllqyYAvmTSOC7cUlb/6XT5MYoOuetNIjrOJ9NDueFMsaTkUriECckSOG6ouL2sN6I4LRhC0XYKGXwJtmKDhmEBbJmh4JtCmCRquCbRtgoZvAm2coOGcQFsnaHgn0OYJGu4JtH2Chn8CbaCg4aBAWyhoeCjQJgoaLgq0jYKGjwJtpKDhpEBbKWh4KdBmChpuCrSdgoafAm2ooOGoQFsqaHgq0KYKGq4KtK2Chq8Cbayg4axAWytoeCvQ5goa7gq0vYKGvwJtsIA5LPykgCVHFhPwJukQivhBvc809KXvhZBCgdVGtSOBSh9MVOlxZZurrvNZ/nbWL5KZbujCp6JCkkdFhCXPOb9+rXDwoMudfkNEXQTrYyO2fXlk7Ev8pO5ewunZ5T2787abSbIhxB8biO5Qj8S0Fq5Tdep+rFMuo3gIVc++btR3X5+B24TMgrEv1Gu3/kRm+hMUFM4dNt5tzU2f+h6rUxZvYAhOP9Ns6VcggZuO7WeaqIVAP0NzO8d+HvsBzOuXbToVMPeeetWxO73u+TvzuuLtNG+kI9j7PJ0mezbntb2xayY5m+MGGRdz+9zNJQoI5/WTtCYVSBqjakWjCIpmaJGNZOLfU08LNPthscj0+03mIdtilDyeqNF/UE8CXPawM+cvNx12Fhbw0i/oDlSjGV/iL7/AtS8y1vN8YQG2spJo1VACvcriUeEn6oHUeJoVaFCF/yC8J53vXjxRL/boV9YnqXlBVeS4/kK/WPakD3HM+tgHok+9TSyAmPKp+u8B8x0S9YKbcsEmKOut3i7NJqGumdoURxJWdXiRecMMVLhpdBflMIz8tcbbyVmRxOq5/nzW+e75vIXMUlDcehsnp/q8F21crpi8hdFa6HzXj9KRfGimTu4X6uEwbhu+SpZzwL1W+CF4UeqlWWXoJdyveVvjTKjpyZQBDMbeNn72TeFL4Q2y7G5t2Xmcc5Kr3Tkr/oAaL0J9A/i7v6qOPtZR7ZOmIx61h9RqxW76/0d69FBQPfXyXwyy7w8wz+JsOijAv1vWf0DxZ/Xzx/rPJRYPLl+srb9c+/r065Vvv6n+lOLTpd8u/W7pq6X1pT8tfbu0v9RdulgKlmDpr0t/W/r7+j/W/7n+r/V/m64/+KQ65zdLzs/6f/8HIEFnYA== v j f ⇠ N ( µ j , j ) AAAyUniclVvbctzGEV3HuTiMncjJY16QUCrbKYolUq6KH837bXm/UyupsNheLEjchJkFSW1tfiJfk9fkF/KSX8lTemYw6B4sKFdYJRJzzqCBmTk9fRYL9fM4EvLVq/989rPPf/6LX/7qi1/P/ebLr377u2df//5CZOMigPMgi7Piqu8LiKMUzmUkY7jKC/CTfgyX/bs1xV+WUIgoS8/kYw5vEz9Mo2EU+BKh989e9sry/fDdbe9PPREl+Dvx5Sjw48nB9NtemYzf3S54vVJEYeK/u/3u/bP5V4uv9I83e7BUHcx3qp+j918vfdUbZME4gVQGsS/Em6VXuXw78QsZBTFM53pjAbkf3PkhvMHD1E9AvJ3ocU29F4gMvGFW4L9UehrlZ0z8RIjHpI891W2LJqfANu7NWA5/eDuJ0nwsIQ3MhYbj2JOZpybJG0QFBDJ+xAM/KCK8Vy8Y+YUfSJxK5yr9xBnDREY4gOnc3Av14x1sXHr7K2fb3vrG5s7BztnO4cGpp6m5tntdwL9qpGJBhZ174e37xZ0n8FZwrYSXDb3Az82xmpQChlAUURqq+x5EZSRst2EUjgvAO03hPsiSxE8Hkx6CMQzldDLpQeJ928Xj76bTmT4BLhUUtteabrX1K6JwVAc7UY22XjLLbZ+zLG/r0c+kzBLbaVW3ZvpV4/ZtN/+pHn3bo/9Uj8D2CJ7qMbA9BqoHLsM2ji5WI/R8D/srXcAQE27g4dwkbgw8VuD0zdJbjNIfevNLKghG2dSLYlYNVQcLXpzdQ/EywPRdnOthSD2tMJxfmpgF/FsPWxMdoO10vN1I+vGit4liEBJzSq29UCuGvIm4aSNuNiNqWt5n9przy9VVhWc7eTiiqrFsz/gw9gd0yvzr+e9nTluoz7FHr3mo7/VwTo2qPzkdqHxz81UKOPPREsBOiDn71J592nL2iT1L5/x9VmfZYj0x5upCz0ydg09MTTPgqABohmTx5l/PRqRZY7Ffz8b2Uw9wEdTJLVMGH8yYbZenB+3EGec5FJ6KY8JsVGE22sKseIV/T/PeCPby5Uu/zKKBNxZqa4qGXp4JEWFBMqHz2MfUqeI/fXdqw80xk1rGqBhzetXn/x5kFWitDrT2k4FwzGkIeg82fYWJoeH6jlAqlrahXr58UiZ4d34cZlhgRknLOJEzd1d3+uRAWaiZka7YUCstoazg7fVwEHWsT28GZ85JKz950syk5rhpVSNn6lOouV119KlFMec31XtUn3/knm9HWl8A71odP3nDleAgipVYY3WAGzp2UEdVvGGcZYWm9ZHh9WHVAal+MllqVhtZYCJMJ7XjWm92KP04GvAO781xkUwMNZ0JCUK2n6CZaT0iyIWqcbmI4iyt6tMJhsgSr/SLyMdstfoG6U9U5AeZZkWCUZ/3EHo+tdNZNGifmL7L9IkJXCYgZuAyA2LAZYCYocsMiQldJiRm5DIjYiKXiYi5dZlbYu5c5o6Y2GXiqZZxkXiRwIxFqz54VJudWcEF73YspDfI0m+kp7wwyvFR7TzOwnhJFTt1Y6d01cxlMmJyl8mJ+eAyH4gpXKYgRriMIEa6jCRm7DJjYkqXKYm5d5l7Yh5c5oGYR5d5JOajy3ycGptnEwArc1Zv72WVJBOTSv0hS5v6vuXIZIntoduMZxyH+wSz3CgDgllilAOCWVaUQDBLiXJIMMuHMiSYJUM5IphlQjkmmKVBeUswy4HyjmCWAGVMcMzghOCEwWyi+QxnBDMxlznBTMnlB4KZjMuCYKbhUhAs+KISLNvnhEu3JJjptrwnmIm2fCCYKbZ8JJjJtfxIsNXqRgzqM7X+tFe06BaM6Fr3ZTDKa92ZwcivdW8Go8HW3RmMEFv3ZzBqbN2hwUiydY8Go8vWXRq5J/dpMApt3anByLR1rwaj1eZubbnE5RLOPbkTg5Fu614MRr+tuzEYEbfux2CU3Lojg5Fz654MRtOtuzIYYbfuy2DU3bozg5F4694MRuetuzMYsbfuz2AU//QOjblQREHtUJIVyo8VSptkleBVBq8RvMbgdYLXGbxB8AaDNwneZPAWwVsM3iZ4m8E7BO8weJfgXQbvEbzH4C7BXQbvE7zP4AOCDxh8SPAhg48IPmLwMcHHDD4h+ITBpwSfMviM4DMGnxN8zuALgi8YfEnwJYOvCL5i8DXB1wy+Ifjm6e3VFR0Y1TGNrjD9aukxbpVzay63xrl1l1vn3IbLbXBu0+U2Obflcluc23a5bc7tuNwO53Zdbpdzey63x7muy3U5t+9y+5w7cLkDzh263CHnjlzuiHPHLnfMuROXO+Hcqcudcu7M5c44d+5y55y7cLkLzl263CXnrlzuinPXLnfNuRuXs7K/4Bai/Aj6cwR+dn1Vn1tmKUzs51mLJWMD9RIqGuY7gwrXx0RZu6wo1yqXFcyQvkHIomiDgggZE21LECE7UlY3SSZEWxBEyHpo44EIGQ5tNxAhm6FNBiJkLrS1QIQshTYUiJCR0DYCkZhNkUHINGjLgEjKptYgZBC0PUCEbIE2BYiQGdBWAJGCzbxBBJtwg1C5L6sVY+tVGoRKuy7siFBB1+UcESrjuogjQsVbl25E2oyq61BLP85Har3131qcZb8Sh9aFBelTGD20qKjYT/oDdYY5ICJLIFS4/kuwVqtSqgUwICL4myAr3kq4FrbCrURbD2Qy4fc/UWK1LRRrQC0U6oANaqIEalso0CG1UJwhtVCYI2rh7bJ7RUHeUgvFeMfmZqJEWI98ogRoWziZbBZRfBmbkokSnW2h6D5QCwVXsJmaKKHVEzRRIrMtnGg2zSiwkloorntqobAeqIWieqQWCurjtPo6DEvwg8F1+UWdUdnVRRcRKra61CJCJVYXWESosOqyigiVU11MEaEiqksoIlQ6deFEhAqmLpeIUJnURRIRKo66NCJCJVEXRESoEOoyiAiVP138EKGip0seIlTqdKFDhAqcLm+IUFnTRQ0RKma6lCFCJUwXMESocOmyhQiVK12sEKEipUsUIlSadGFChAqSLkeIUBnSRQiRG7aCVBf6vCwkR6NqI+7hEZs9m/qK6VbpXw+OFaBTW4BQRWeQCvU98joEsV8Aimq0onYgvKLxgWIYqaeokAbZIEpDDOaPY4WIYX2cTCdCPQA+BflUgH4WD34qTP9hiknYfIibCv31oSmpVTz9ALsamjTWMxVM/XLVYqR/uWYxygC5bjHKAblhMcoCuWkxygO5ZTHKBLltMcoFuWMxyga5azHKB7lnMcoI2bUY5YTctxhlhTywGOWFPLQYZYY8shjlhjy2GGWHPLEY5Yc8tRhliDyzGOWIPLcYZYm8sBjliby0GGWKvLIY5Yq8thhli7yxmDFrKOStws9Hhg3tR+DA+SQSrjKYdBGuMZikEa4zmNQRbjCYBBJuMpg0Em4xmGQSbjOYlBLuMJjEEu4ymPQS7jGYJBN2GUyqCfcZTMIJDxhM2gkPGUzyCY8YTAoKjxlMIgpPGEw6Ck8ZTFIKzxhMagrPGUyCCi8YTJoKLxlMsgqvGEzKCq8ZTOIKbxhsPwzg1lZZNVE/YOkzcYlVQklbYo1QkpZYJ1Qr64W3rr/kGAvwfE+A9PDSMQy8jQWvD4GvcDmKhHefjeMBQtgCT+ivRNBLjgtPvfiTxRhIvQoDDzl6S/09r/22fZOuSOoUW4SSOMU2oaRNsUMoSVPsEkrKFHuEkjBFl1DSpdgnlGQpDgglVYpDQkmU4ohQ0qQ4JpQkKU4IJUWKU0JJkOKMUNKjOCeU5CguCCU1iktCSYziilDSorgmlKQobgitn8ak6PtAf4TwzXOYygQCOYCua/6VPVyhFkp1lVoo0TVqoTTXqYWb3Qa1UESb1ELxbFELRbNNLRTLDrVQJLvUQnHsUQtF0aUWimGfWiiCA2rh4h9SCxf9iFq42MfUwkU+oRYu7im1cFHPqIWLeU4tXMQLauHiXVILF+2KWrhY19TCRbph16ucVuWy1JIBXzJpHBduKSp/9bt8mMQGXfDuIznKxtJDu+PdY0nLoXANEZAjctxQdXlZa0B3nDGCoO0SNPwSaMMEDccE2jJBwzOBNk3QcE2gbRM0fBNo4wQN5wTaOkHDO4E2T9BwT6DtEzT8E2gDBQ0HBdpCQcNDgTZR0HBRoG0UNHwUaCMFDScF2kpBw0uBNlPQcFOg7RQ0/BRoQwUNRwXaUkHDU4E2VdBwVaBtFTR8FWhjBQ1nBdpaQcNbgTZX0HBXoO0VNPwVaIMFzGHhJwUsObIYgzdOB1DEj+p9poEvfS+EFAqsNqodCVR6f6xKjyvbXHWdTvL3k16RTHRDFz4VFZI8KiIsec759WuF/Udd7vQbIuoiWB8bse3LIyNf4id19xJOzyPe82jadjNJNoD4UwPRHeqRmNbMdapOR5/qlMsoHkDVs6cb9d3XZ+A2IbNg5Av12q0/lpn+BAWFc4eNd1tz06e+x+qU2RsYgNPPNFv6FUjgpmP7mSZqIdDP0NzOsZ/HfgDT+mWbbgVMvRdedexOr3v+xrSueBvNG+kK9j5Pt8meTHltb+yaSc7muEHGxdQ+d3OJAsJp/SStSQWSxqha0TCCohlaZEOZ+A/U0wLNflgsMv1+k3nINhslj8dq9B/VkwCX3etO+ctNe92ZBbzwC7oD1WjGl/jHL3Dti4z1PJ1ZgLWsJFo1lEAvs3hY+Il6IDW6zwo0qMJ/FN7z7rvl5+rFHv3K+jg1L6iKHNdf6BfLnvcgjlkf+0D0hbeKBRBTPlW/HjHfIVEvuCkXbIKy3urt0mwc6pqpTXEkYUGHF5k3yECFu4/uohwGkb/YeDs5K5JYPdefTrrvXk1byCwFxS21cfJen7fcxuWKyVsYrYXuu16UDuVjM3Vyv1APh3Hb8FWynALutcIPwYtSL80qQy/hYdFbG2VCTU+mDGAw8tbxs28K3wivn2V3i3PO45zDXO3OWfEX1HgR6hvAv70FdfSpjmqfNB3xqD2kVit207+f6HGGgjpTL//FIHt+H/Mszu77Bfh3c++fzS81/7vE7MHF8uLS68Xl4+/nf/yh+q8UX3T+2Plz59vOUuevnR87252jznkn6Py984/OPzv/Wvr30n+XP1v+3HT92WfVOX/oOD/LX/4PoW12ew== K AAAyJHiclVvLctvIFdVMXhMlk8wky2xQkV0zSckqy57KYzd6SxYlURL1ND0uELwEYeFldBOUzGJ+INvkF/I12aWyyCbfktvdaNzbIOSpqMoW+pzGBbr73L6HIDTI40jI58//88mnP/jhj378k89+uvyzn3/+i19+8eWvLkU2KQK4CLI4K64HvoA4SuFCRjKG67wAPxnEcDW421L8VQmFiLK0Jx9yeJP4YRqNosCXCJ0evv1i5fnac/3jLR6sVwcrS9VP9+2X65/3h1kwSSCVQewL8Xr9eS7fzPxCRkEM8+X+REDuB3d+CK/xMPUTEG9m+k7n3lNEht4oK/BfKj2N8jNmfiLEQzLAnokvx6LJKbCNez2Roz+9mUVpPpGQBuZCo0nsycxTw/aGUQGBjB/wwA+KCO/VC8Z+4QcSJ8e5yiBxxjCTEQ5gvrz8VP14xztX3tFGb9/b3tk9OD7oHZwcn3uaWm6711X8rUYqVlXY5afekV/ceQJvBWdfeNnIC/zcHKtJKWAERRGlobrvYVRGwnYbReGkALzTFKZBliR+Opz1EYxhJOezWR8S7+sOHv9uPl/oE+BSQWF7belWW78iCsd1sDPVaOsls9z26WV5W49BJmWW2E6burXQrxq3b7v5j/UY2B6Dx3oEtkfwWI+h7TFUPXAZ9nF0sRqh53vYX+kCRphCQw/nJnFj4LEC56/X32CUwchbWVdBMMquXhSzaqg6WPXibArFswATcm25jyH1tMJoZX1mFvAvfWzNdIC20/F2I+nHa94uikFIzCm19kKtGPIm4q6NuNuMqGk5zew1V15UVxWe7eThiKrGC3vG+4k/pFNWXq58s3Daan2OPXrJQ32jh3NuVP3R6UDlm5uvUsCZj5YAdkLM2ef27POWs8/sWTrnp1mdZWv1xJirCz0zdQ4+MjXNgOMCoBmSxVt5uRiRZo3FfrkY2089wEVQJ7dMGbw3Y7ZdHh+0E2eS51B4Ko4Js1OF2WkLs+EV/pTmvRHs2bNnfplFQ28i1NYUjbw8EyLCEmNC57GPqVPFf/zu1IabYya1jFEx5vSqz/89yCrQVh1o63sD4ZjTEPQebPoKE0PD9R2hVCxtQz179qhM8O78OMywwIyTlnEiZ+6u7vTRgbJQCyPdsKE2WkJZwdvr4SDqWB/fDHrOSRvfe9LCpOa4aVUjZ+pTqLlddfSxRTHnN9Xbrc/vuufbkdYXwLtWx4/ecCU4iGIl1lgd4IaOHdRRFW8UZ1mhaX1keH1YdUBqkMzWm9VGFpgI81lfVf7Aj2fbzQ6lH0dD3uGtOS6SmaHmCyFByPYTNDOvRwS5UDUuF1GcpVV9OsMQWeKVfhH5mK1W3yD9mYp8L9OsSDDqkz5CT+Z2OosG7RMzcJkBMYHLBMQMXWZIDLgMEDNymRExocuExIxdZkxM5DIRMe9c5h0xdy5zR0zsMvFcy7hIvEhgxqL5Hj6ozc6s4Kr3biKkN8zSr6SnvDDK8UHtPM7CeEkVO3Vjp3TVzGUyYnKXyYl57zLviSlcpiBGuIwgRrqMJGbiMhNiSpcpiZm6zJSYe5e5J+bBZR6I+eAyH+bG5tkEwMqc1dt7WSXJzKTSYMTSpr5vOTZZYnvoNuMZx+EBwSw3yoBglhjlkGCWFSUQzFKiHBHM8qEMCWbJUI4JZplQTghmaVC+I5jlQHlHMEuAMiY4ZnBCcMJgNtF8hjOCmZjLnGCm5PI9wUzGZUEw03ApCBZ8UQmW7XPCpVsSzHRbTglmoi3vCWaKLR8IZnItPxBstboTg/pMrT/tFS26BSO61n0ZjPJad2Yw8mvdm8FosHV3BiPE1v0ZjBpbd2gwkmzdo8HosnWXRu7RfRqMQlt3ajAybd2rwWi1uVtbLnG5hHOP7sRgpNu6F4PRb+tuDEbErfsxGCW37shg5Ny6J4PRdOuuDEbYrfsyGHW37sxgJN66N4PReevuDEbsrfszGMU/vkNjLhRRUDuUZIPyY4PSJtkkeJPBWwRvMXib4G0G7xC8w+BdgncZvEfwHoP3Cd5n8AHBBwx+RfArBh8SfMjgDsEdBh8RfMTgY4KPGXxC8AmDuwR3GXxK8CmDzwg+Y/A5wecM7hHcY/AFwRcMviT4ksFXBF8x+JrgawbfEHzD4FuCbx/fXl3RgVEd0+gG06+WHuM2Obflcluc23a5bc7tuNwO53Zdbpdzey63x7l9l9vn3IHLHXDulcu94tyhyx1yruNyHc4dudwR545d7phzJy53wrmuy3U5d+pyp5w7c7kzzp273Dnnei7X49yFy11w7tLlLjl35XJXnLt2uWvO3bjcDeduXc7K/pJbiPID6M8R+Nn1eX1umaUws59nLZZMDNRPqGiUIgoTv8L1MVHWLivKtcplBTNkYBCyKNqgIELGRNsSRMiOlNVNkgnRFgQRsh7aeCBChkPbDUTIZmiTgQiZC20tECFLoQ0FImQktI1AJGZTZBAyDdoyIJKyqTUIGQRtDxAhW6BNASJkBrQVQKRgM28QwSbcIFTuy2rF2HqVBqHSrgs7IlTQdTlHhMq4LuKIUPHWpRuRNqPqOtTSj/OxWm/9uxZnOajEoXVhQfoURg8tKir2k8FQnWEOiMgSCBWufxOs1aqUagEMiAj+T5AVbyVcC1vhVqKtBzKb8fufKbHaFoo1oBYKdcgGNVMCtS0U6IhaKM6QWijMMbXwdtm9oiDfUQvFeMfmZqZEWI98pgRoWziZbBZRfBmbkpkSnW2h6N5TCwVXsJmaKaHVEzRTIrMtnGg2zSiwkloorim1UFj31EJRPVALBfVhXn0dhiX43uC6/KLOqOzqoosIFVtdahGhEqsLLCJUWHVZRYTKqS6miFAR1SUUESqdunAiQgVTl0tEqEzqIokIFUddGhGhkqgLIiJUCHUZRITKny5+iFDR0yUPESp1utAhQgVOlzdEqKzpooYIFTNdyhChEqYLGCJUuHTZQoTKlS5WiFCR0iUKESpNujAhQgVJlyNEqAzpIoTILVtBqgsDXhaS7rjaiPt4xGbPpr5iOlX614NjBejcFiBUUQ9Sob5H3oYg9gtAUY031A6EVzQ+UIwi9RQV0iAbRmmIwfxJrBAxqo+T+UyoB8DnIB8LMMji4feFGdzPMQmbD3FTob8+NCW1iqcfYFdDk8Z6poKpX25ajPQvtyxGGSC3LUY5IHcsRlkgdy1GeSD3LEaZIPctRrkgDyxG2SBfWYzyQR5ajDJCdixGOSGPLEZZIY8tRnkhTyxGmSG7FqPckKcWo+yQZxaj/JDnFqMMkT2LUY7IC4tRlshLi1GeyCuLUabIa4tRrsgbi1G2yFuLGbOGQt4r/Hxs2NB+BA6cTyLhJoNJF+EWg0ka4TaDSR3hDoNJIOEug0kj4R6DSSbhPoNJKeEBg0ks4SsGk17CQwaTZMIOg0k14RGDSTjhMYNJO+EJg0k+YZfBpKDwlMEkovCMwaSj8JzBJKWwx2BSU3jBYBJUeMlg0lR4xWCSVXjNYFJWeMNgEld4y2D7YQC3tsqqifoBy4CJS2wSStoSW4SStMQ2oVpZT71t/SXHRIDnewKkh5eOYejtrHoDCHyFy3EkvGk2iYcIYQs8ob8SQS85KTz14k8WYyD1Kgzc5+gt9fe89tv2XboiqVPsEUriFPuEkjbFAaEkTfGKUFKmOCSUhCk6hJIuxRGhJEtxTCipUpwQSqIUXUJJk+KUUJKkOCOUFCnOCSVBih6hpEdxQSjJUVwSSmoUV4SSGMU1oaRFcUMoSVHcElo/jUnR94H+COGb5zCVCQRyAB3X/Ct7uEEtlOomtVCiW9RCaW5TCze7HWqhiHapheLZoxaKZp9aKJYDaqFIXlELxXFILRRFh1oohiNqoQiOqYWLf0ItXPQutXCxT6mFi3xGLVzcc2rhovaohYt5QS1cxEtq4eJdUQsX7ZpauFg31MJFumXXq5xW5bLUkgFfMmkcF24pKn/1u3yYxAZd9aaRHGcT6aHd8aZY0nIoXEME5IgcN1RdXtYa0B0XjCBouwQNvwTaMEHDMYG2TNDwTKBNEzRcE2jbBA3fBNo4QcM5gbZO0PBOoM0TNNwTaPsEDf8E2kBBw0GBtlDQ8FCgTRQ0XBRoGwUNHwXaSEHDSYG2UtDwUqDNFDTcFGg7BQ0/BdpQQcNRgbZU0PBUoE0VNFwVaFsFDV8F2lhBw1mBtlbQ8FagzRU03BVoewUNfwXaYAFzWPhJAUuOLCbgTdIhFPGDep9p6EvfCyGFAquNakcClT6YqNLjyjZXXeez/O2sXyQz3dCFT0WFJI+KCEuec379WuHgQZc7/YaIugjWx0Zs+/LI2Jf4Sd29hNOzy3t25203k2RDiD82EN2hHolpLVyn6tT9WKdcRvEQqp593ajvvj4DtwmZBWNfqNdu/YnM9CcoKJw7bLzbmps+9T1WpyzewBCcfqbZ0q9AAjcd2880UQuBfobmdo79PPYDmNcv23QqYO499apjd3rd83fmdcXbad5IR7D3eTpN9mzOa3tj10xyNscNMi7m9rmbSxQQzusnaU0qkDRG1YpGERTN0CIbycS/p54WaPbDYpHp95vMQ7bFKHk8UaP/oJ4EuOxhZ85fbjrsLCzgpV/QHahGM77EX36Ba19krOf5wgJsZSXRqqEEepXFo8JP1AOp8TQr0KAK/0F4TzrfvXiiXuzRr6xPUvOCqshx/YV+sexJH+KY9bEPRJ96m1gAMeVT9d8D5jsk6gU35YJNUNZbvV2aTUJdM7UpjiSs6vAi84YZqHDT6C7KYRj5a423k7MiidVz/fms893zeQuZpaC49TZOTvV5L9q4XDF5C6O10PmuH6Uj+dBMndwv1MNh3DZ8lSzngHut8EPwotRLs8rQS7hf87bGmVDTkykDGIy9bfzsm8JXwhtk2d3asvM45yRXu3NW/B41XoT6BvB3f1Udfayj2idNRzxqD6nVit30/4/06KGgeurlvxhk3x9gnsXZdFCAf7es/4Diz+rnD/WfSyweXL5YW3+59s3pNyvfblZ/SvHZ0m+Wfrv09dL60h+Xvl3aX+ouXSwFS7D016W/Lf19/R/r/1z/1/q/TddPP6nO+fWS87P+3/8B+KVnZA== Y j | v j q AAAyLniclVvZctvIFdVknSiZZCZ5zAsqsmsmKVll2a4sb6N9oyRqX0zbBYKXICxsRjdByQzzF3lNfiFfk6o8pPKaz8jtbjTubRDyVFRlC31O4wLdfW7fQxDq53Ek5PPn//rse9//wQ9/9OPPf7L405998fNffPnVLy9FNi4CuAiyOCuu+76AOErhQkYyhuu8AD/px3DVv9tQ/FUJhYiy9Fw+5PAm8cM0GkaBLxF6ffP2/Z97Zfnuw9v3775cer7yXP948wer1cHSQvXTfffV6he9QRaME0hlEPtCvF59nss3U7+QURDDbLE3FpD7wZ0fwms8TP0ExJupvueZ9xSRgTfMCvyXSk+j/IypnwjxkPSxZ+LLkWhyCmzjXo/l8I9vplGajyWkgbnQcBx7MvPUBHiDqIBAxg944AdFhPfqBSO/8AOJ0+RcpZ84Y5jKCAcwW1x8qn68o60r73DtfNfb3NreO9o73zs+OvM0tdh2r8v4W41ULKuwi0+9Q7+48wTeCq6D8LKhF/i5OVaTUsAQiiJKQ3Xfg6iMhO02jMJxAXinKUyCLEn8dDDtIRjDUM6m0x4k3jcdPP7tbDbXJ8ClgsL22tCttn5FFI7qYKeq0dZLZrntc57lbT36mZRZYjut69Zcv2rcvu3mP9ajb3v0H+sR2B7BYz0GtsdA9cBl2MXRxWqEnu9hf6ULGGIyDTycm8SNgccKnL1efYNR+kNvaVUFwSjbelHMqqHqYNmLswkUzwJMzZXFHobU0wrDpdWpWcC/9LA11QHaTsfbjaQfr3jbKAYhMafU2gu1YsibiNs24nYzoqblJLPXXHpRXVV4tpOHI6oaL+wZH8b+gE5Zern0au605foce/SSh3qlh3NmVP3J6UDlm5uvUsCZj5YAdkLM2Wf27LOWs0/tWTrnJ1mdZSv1xJirCz0zdQ4+MjXNgKMCoBmSxVt6OR+RZo3Ffjkf2089wEVQJ7dMGXwwY7ZdHh+0E2ec51B4Ko4Js1WF2WoLs+YV/oTmvRHs2bNnfplFA28s1NYUDb08EyLCYmNC57GPqVPFf/zu1IabYya1jFEx5vSqz/89yCrQRh1o4zsD4ZjTEPQebPoKE0PD9R2hVCxtQz179qhM8O78OMywwIySlnEiZ+6u7vTJgbJQcyNds6HWWkJZwdvr4SDqWJ/eDM6dk9a+86S5Sc1x06pGztSnUHO76uhTi2LOb6q3W5/fdc+3I60vgHetjh+94UpwEMVKrLE6wA0dO6ijKt4wzrJC0/rI8Pqw6oBUP5muNquNLDARZtOeqvyBH083mx1KP44GvMM7c1wkU0PN5kKCkO0naGZWjwhyoWpcLqI4S6v6dIohssQr/SLyMVutvkH6UxX5XqZZkWDUJz2EnszsdBYN2iem7zJ9YgKXCYgZuMyAGHAZIGboMkNiQpcJiRm5zIiYyGUiYt67zHti7lzmjpjYZeKZlnGReJHAjEUbPnhQm51ZwWXv/VhIb5ClX0tPeWGU44PaeZyF8ZIqdurGTumqmctkxOQukxPzwWU+EFO4TEGMcBlBjHQZSczYZcbElC5TEjNxmQkx9y5zT8yDyzwQ89FlPs6MzbMJgJU5q7f3skqSqUml/pClTX3fcmSyxPbQbcYzjsN9gllulAHBLDHKAcEsK0ogmKVEOSSY5UMZEsySoRwRzDKhHBPM0qB8TzDLgfKOYJYAZUxwzOCE4ITBbKL5DGcEMzGXOcFMyeUHgpmMy4JgpuFSECz4ohIs2+eES7ckmOm2nBDMRFveE8wUWz4QzORafiTYanUrBvWZWn/aK1p0C0Z0rfsyGOW17sxg5Ne6N4PRYOvuDEaIrfszGDW27tBgJNm6R4PRZesujdyj+zQYhbbu1GBk2rpXg9Fqc7e2XOJyCece3YnBSLd1Lwaj39bdGIyIW/djMEpu3ZHByLl1Twaj6dZdGYywW/dlMOpu3ZnBSLx1bwaj89bdGYzYW/dnMIp/fIfGXCiioHYoyRrlxxqlTbJO8DqDNwjeYPAmwZsM3iJ4i8HbBG8zeIfgHQbvErzL4D2C9xi8T/A+gw8IPmBwh+AOgw8JPmTwEcFHDD4m+JjBXYK7DD4h+ITBpwSfMviM4DMGnxN8zuALgi8YfEnwJYOvCL5i8DXB1wy+IfiGwbcE3z6+vbqiA6M6ptE1pl8tPcatc27D5TY4t+lym5zbcrktzm273Dbndlxuh3O7LrfLuT2X2+Pcvsvtc+7A5Q4413G5DucOXe6Qc0cud8S5Y5c75lzX5bqcO3G5E86dutwp585c7oxz5y53zrkLl7vg3KXLXXLuyuWuOHftctecu3G5G87dupyV/SW3EOVH0J8j8LPr8/rcMkthaj/PWiwZG6iXUNEoRRQmfoXrY6KsXVaUa5XLCmZI3yBkUbRBQYSMibYliJAdKaubJBOiLQgiZD208UCEDIe2G4iQzdAmAxEyF9paIEKWQhsKRMhIaBuBSMymyCBkGrRlQCRlU2sQMgjaHiBCtkCbAkTIDGgrgEjBZt4ggk24Qajcl9WKsfUqDUKlXRd2RKig63KOCJVxXcQRoeKtSzcibUbVdailH+cjtd76dy3Osl+JQ+vCgvQpjB5aVFTsJ/2BOsMcEJElECpc/yZYq1Up1QIYEBH8nyAr3kq4FrbCrURbD2Q65fc/VWK1LRRrQC0U6oANaqoEalso0CG1UJwhtVCYI2rh7bJ7RUG+pxaK8Y7NzVSJsB75VAnQtnAy2Syi+DI2JVMlOttC0X2gFgquYDM1VUKrJ2iqRGZbONFsmlFgJbVQXBNqobDuqYWieqAWCurjrPo6DEvwvcF1+UWdUdnVRRcRKra61CJCJVYXWESosOqyigiVU11MEaEiqksoIlQ6deFEhAqmLpeIUJnURRIRKo66NCJCJVEXRESoEOoyiAiVP138EKGip0seIlTqdKFDhAqcLm+IUFnTRQ0RKma6lCFCJUwXMESocOmyhQiVK12sEKEipUsUIlSadGFChAqSLkeIUBnSRQiRW7aCVBf6vCwk3VG1EffwiM2eTX3FdKr0rwfHCtCZLUCoonNIhfoeeROC2C8ARTVaUzsQXtH4QDGM1FNUSINsEKUhBvPHsULEsD5OZlOhHgCfgXwsQD+LB98Vpn8/wyRsPsRNhf760JTUKp5+gF0NTRrrmQqmfrluMdK/3LAYZYDctBjlgNyyGGWB3LYY5YHcsRhlgty1GOWC3LMYZYPctxjlgzywGGWE7FiMckIeWoyyQh5ZjPJCHluMMkN2LUa5IU8sRtkhTy1G+SHPLEYZIs8tRjkiLyxGWSIvLUZ5Iq8sRpkiry1GuSJvLEbZIm8tZswaCnmn8PORYUP7EThwPomE6wwmXYQbDCZphJsMJnWEWwwmgYTbDCaNhDsMJpmEuwwmpYR7DCaxhPsMJr2EBwwmyYQdBpNqwkMGk3DCIwaTdsJjBpN8wi6DSUHhCYNJROEpg0lH4RmDSUrhOYNJTeEFg0lQ4SWDSVPhFYNJVuE1g0lZ4Q2DSVzhLYPthwHc2iqrJuoHLH0mLrFOKGlLbBBK0hKbhGplPfU29ZccYwGe7wmQHl46hoG3tez1IfAVLkeR8CbZOB4ghC3whP5KBL3kuPDUiz9ZjIHUqzBwn6O31N/z2m/bt+mKpE6xQyiJU+wSStoUe4SSNMU+oaRMcUAoCVN0CCVdikNCSZbiiFBSpTgmlEQpuoSSJsUJoSRJcUooKVKcEUqCFOeEkh7FBaEkR3FJKKlRXBFKYhTXhJIWxQ2hJEVxS2j9NCZF3wf6I4RvnsNUJhDIAXRc86/s4Rq1UKrr1EKJblALpblJLdzstqiFItqmFopnh1ooml1qoVj2qIUi2acWiuOAWiiKDrVQDIfUQhEcUQsX/5hauOhdauFin1ALF/mUWri4Z9TCRT2nFi7mBbVwES+phYt3RS1ctGtq4WLdUAsX6ZZdr3JalctSSwZ8yaRxXLilqPzV7/JhEht02ZtEcpSNpYd2x5tgScuhcA0RkCNy3FB1eVlrQHecM4Kg7RI0/BJowwQNxwTaMkHDM4E2TdBwTaBtEzR8E2jjBA3nBNo6QcM7gTZP0HBPoO0TNPwTaAMFDQcF2kJBw0OBNlHQcFGgbRQ0fBRoIwUNJwXaSkHDS4E2U9BwU6DtFDT8FGhDBQ1HBdpSQcNTgTZV0HBVoG0VNHwVaGMFDWcF2lpBw1uBNlfQcFeg7RU0/BVogwXMYeEnBSw5shiDN04HUMQP6n2mgS99L4QUCqw2qh0JVHp/rEqPK9tcdZ1N83fTXpFMdUMXPhUVkjwqIix5zvn1a4X9B13u9Bsi6iJYHxux7csjI1/iJ3X3Ek7PLu/ZnbXdTJINIP7UQHSHeiSmNXedqlP3U51yGcUDqHr2dKO++/oM3CZkFox8oV679ccy05+goHDusPFua2761PdYnTJ/AwNw+plmS78CCdx0bD/TRC0E+hma2zn289gPYFa/bNOpgJn31KuO3el1z9+a1RVvq3kjHcHe5+k02dMZr+2NXTPJ2Rw3yLiY2eduLlFAOKufpDWpQNIYVSsaRlA0Q4tsKBP/nnpaoNkPi0Wm328yD9nmo+TxWI3+o3oS4LIHnRl/uemgM7eAl35Bd6AazfgSf/kFrn2RsZ5ncwuwkZVEq4YS6FUWDws/UQ+kRpOsQIMq/AfhPem8ffFEvdijX1kfp+YFVZHj+gv9YtmTHsQx62MfiD711rEAYsqn6r8HzHdI1AtuygWboKy3ers0G4e6ZmpTHElY1uFF5g0yUOEm0V2UwyDyVxpvJ2dFEqvn+rNp5+3zWQuZpaC41TZOTvR5L9q4XDF5C6O10Hnbi9KhfGimTu4X6uEwbhu+SpYzwL1W+CF4UeqlWWXoJdyveBujTKjpyZQBDEbeJn72TeFr4fWz7G5l0Xmcc5yr3TkrfocaL0J9A/i7t6yOPtVR7ZOmIx61h9RqxW76/0d6nKOgztXLfzHInt/HPIuzSb8A/25R/wHFn9TP7+s/l5g/uHyxsvpy5dXJq6Vv16s/pfh84dcLv1n4ZmF14Q8L3y7sLnQXLhaChWzhrwt/W/j76j9W/7n679X/mK7f+6w651cLzs/qf/8HJmFr+g== compute mean and variance f j k AAAyKniclVvZctvIFdVMtomSSWaSx7ygIrtmkpJVlu3K8jbaN2qnVtN2geAlCAub0U1QMov5h7wmv5CvydtUXvMhud2Nxr0NQp6Kqmyhz2lcoLvP7XsIQv08joR8/vz7zz7/0Y9/8tOfffHzxV/88stf/fqrr39zKbJxEcBFkMVZcd33BcRRChcykjFc5wX4ST+Gq/7dhuKvSihElKVd+ZDDm8QP02gYBb5E6KpXDt/dvX3/7qul5yvP9Y83f7BaHSwtVD8n775e/bI3yIJxAqkMYl+I16vPc/lm6hcyCmKYLfbGAnI/uPNDeI2HqZ+AeDPV9zvzniIy8IZZgf9S6WmUnzH1EyEekj72THw5Ek1OgW3c67Ec/uXNNErzsYQ0MBcajmNPZp4avDeICghk/IAHflBEeK9eMPILP5A4Rc5V+okzhqmMcACzxcWn6sc72rryDte6u97m1vbe0V537/jo3NPUYtu9LuNvNVKxrMIuPvUO/eLOE3gruAbCy4Ze4OfmWE1KAUMoiigN1X0PojISttswCscF4J2mMAmyJPHTwbSHYAxDOZtOe5B433bw+A+z2VyfAJcKCttrQ7fa+hVROKqDnalGWy+Z5bZPN8vbevQzKbPEdlrXrbl+1bh9281/rEff9ug/1iOwPYLHegxsj4Hqgcuwi6OL1Qg938P+ShcwxEQaeDg3iRsDjxU4e736BqP0h97SqgqCUbb1ophVQ9XBshdnEyieBZiWK4s9DKmnFYZLq1OzgH/rYWuqA7SdjrcbST9e8bZRDEJiTqm1F2rFkDcRt23E7WZETctJZq+59KK6qvBsJw9HVDVe2DM+jP0BnbL0cunV3GnL9Tn26CUP9UoP59yo+pPTgco3N1+lgDMfLQHshJizz+3Z5y1nn9mzdM5PsjrLVuqJMVcXembqHHxkapoBRwVAMySLt/RyPiLNGov9cj62n3qAi6BObpky+GDGbLs8PmgnzjjPofBUHBNmqwqz1RZmzSv8Cc17I9izZ8/8MosG3liorSkaenkmRISFxoTOYx9Tp4r/+N2pDTfHTGoZo2LM6VWf/3uQVaCNOtDGDwbCMach6D3Y9BUmhobrO0KpWNqGevbsUZng3flxmGGBGSUt40TO3F3d6ZMDZaHmRrpmQ621hLKCt9fDQdSxPr0ZdJ2T1n7wpLlJzXHTqkbO1KdQc7vq6FOLYs5vqvekPv/EPd+OtL4A3rU6fvSGK8FBFCuxxuoAN3TsoI6qeMM4ywpN6yPD68OqA1L9ZLrarDaywESYTXuq8gd+PN1sdij9OBrwDu/McZFMDTWbCwlCtp+gmVk9IsiFqnG5iOIsrerTGYbIEq/0i8jHbLX6BulPVeR7mWZFglGf9BB6MrPTWTRon5i+y/SJCVwmIGbgMgNiwGWAmKHLDIkJXSYkZuQyI2Iil4mIee8y74m5c5k7YmKXiWdaxkXiRQIzFi344EFtdmYFl733YyG9QZZ+Iz3lhVGOD2rncRbGS6rYqRs7patmLpMRk7tMTswHl/lATOEyBTHCZQQx0mUkMWOXGRNTukxJzMRlJsTcu8w9MQ8u80DMR5f5ODM2zyYAVuas3t7LKkmmJpX6Q5Y29X3LkckS20O3Gc84DvcJZrlRBgSzxCgHBLOsKIFglhLlkGCWD2VIMEuGckQwy4RyTDBLg/I9wSwHyjuCWQKUMcExgxOCEwazieYznBHMxFzmBDMllx8IZjIuC4KZhktBsOCLSrBsnxMu3ZJgpttyQjATbXlPMFNs+UAwk2v5kWCr1a0Y1Gdq/WmvaNEtGNG17stglNe6M4ORX+veDEaDrbszGCG27s9g1Ni6Q4ORZOseDUaXrbs0co/u02AU2rpTg5Fp614NRqvN3dpyicslnHt0JwYj3da9GIx+W3djMCJu3Y/BKLl1RwYj59Y9GYymW3dlMMJu3ZfBqLt1ZwYj8da9GYzOW3dnMGJv3Z/BKP7xHRpzoYiC2qEka5Qfa5Q2yTrB6wzeIHiDwZsEbzJ4i+AtBm8TvM3gHYJ3GLxL8C6D9wjeY/A+wfsMPiD4gMEdgjsMPiT4kMFHBB8x+JjgYwafEHzC4FOCTxl8RvAZg88JPmdwl+Augy8IvmDwJcGXDL4i+IrB1wRfM/iG4BsG3xJ8+/j26ooOjOqYRteYfrX0GLfOuQ2X2+Dcpsttcm7L5bY4t+1y25zbcbkdzu263C7n9lxuj3P7LrfPuQOXO+Bcx+U6nDt0uUPOHbncEeeOXe6Ycycud8K5U5c75dyZy51x7tzlzjnXdbku5y5c7oJzly53ybkrl7vi3LXLXXPuxuVuOHfrclb2l9xClB9Bf47Az67P63PLLIWp/TxrsWRsoF5CRaMUUZj4Fa6PibJ2WVGuVS4rmCF9g5BF0QYFETIm2pYgQnakrG6STIi2IIiQ9dDGAxEyHNpuIEI2Q5sMRMhcaGuBCFkKbSgQISOhbQQiMZsig5Bp0JYBkZRNrUHIIGh7gAjZAm0KECEzoK0AIgWbeYMINuEGoXJfVivG1qs0CJV2XdgRoYKuyzkiVMZ1EUeEircu3Yi0GVXXoZZ+nI/UeuvftTjLfiUOrQsL0qcwemhRUbGf9AfqDHNARJZAqHD9m2CtVqVUC2BARPB/gqx4K+Fa2Aq3Em09kOmU3/9UidW2UKwBtVCoAzaoqRKobaFAh9RCcYbUQmGOqIW3y+4VBfmeWijGOzY3UyXCeuRTJUDbwslks4jiy9iUTJXobAtF94FaKLiCzdRUCa2eoKkSmW3hRLNpRoGV1EJxTaiFwrqnForqgVooqI+z6uswLMH3BtflF3VGZVcXXUSo2OpSiwiVWF1gEaHCqssqIlROdTFFhIqoLqGIUOnUhRMRKpi6XCJCZVIXSUSoOOrSiAiVRF0QEaFCqMsgIlT+dPFDhIqeLnmIUKnThQ4RKnC6vCFCZU0XNUSomOlShgiVMF3AEKHCpcsWIlSudLFChIqULlGIUGnShQkRKki6HCFCZUgXIURu2QpSXejzspCcjKqNuIdHbPZs6iumU6V/PThWgM5tAUIVdSEV6nvkTQhivwAU1WhN7UB4ReMDxTBST1EhDbJBlIYYzB/HChHD+jiZTYV6AHwO8rEA/Swe/FCY/v0Mk7D5EDcV+utDU1KrePoBdjU0aaxnKpj65brFSP9yw2KUAXLTYpQDcstilAVy22KUB3LHYpQJctdilAtyz2KUDXLfYpQP8sBilBGyYzHKCXloMcoKeWQxygt5bDHKDHliMcoNeWoxyg55ZjHKD3luMcoQ2bUY5Yi8sBhliby0GOWJvLIYZYq8thjliryxGGWLvLWYMWso5J3Cz0eGDe1H4MD5JBKuM5h0EW4wmKQRbjKY1BFuMZgEEm4zmDQS7jCYZBLuMpiUEu4xmMQS7jOY9BIeMJgkE3YYTKoJDxlMwgmPGEzaCY8ZTPIJTxhMCgpPGUwiCs8YTDoKzxlMUgq7DCY1hRcMJkGFlwwmTYVXDCZZhdcMJmWFNwwmcYW3DLYfBnBrq6yaqB+w9Jm4xDqhpC2xQShJS2wSqpX11NvUX3KMBXi+J0B6eOkYBt7WsteHwFe4HEXCm2TjeIAQtsAT+isR9JLjwlMv/mQxBlKvwsB9jt5Sf89rv23fpiuSOsUOoSROsUsoaVPsEUrSFPuEkjLFAaEkTNEhlHQpDgklWYojQkmV4phQEqU4IZQ0KU4JJUmKM0JJkeKcUBKk6BJKehQXhJIcxSWhpEZxRSiJUVwTSloUN4SSFMUtofXTmBR9H+iPEL55DlOZQCAH0HHNv7KHa9RCqa5TCyW6QS2U5ia1cLPbohaKaJtaKJ4daqFodqmFYtmjFopkn1oojgNqoSg61EIxHFILRXBELVz8Y2rhop9QCxf7lFq4yGfUwsU9pxYuapdauJgX1MJFvKQWLt4VtXDRrqmFi3VDLVykW3a9ymlVLkstGfAlk8Zx4Zai8le/y4dJbNBlbxLJUTaWHtodb4IlLYfCNURAjshxQ9XlZa0B3XHOCIK2S9DwS6ANEzQcE2jLBA3PBNo0QcM1gbZN0PBNoI0TNJwTaOsEDe8E2jxBwz2Btk/Q8E+gDRQ0HBRoCwUNDwXaREHDRYG2UdDwUaCNFDScFGgrBQ0vBdpMQcNNgbZT0PBToA0VNBwVaEsFDU8F2lRBw1WBtlXQ8FWgjRU0nBVoawUNbwXaXEHDXYG2V9DwV6ANFjCHhZ8UsOTIYgzeOB1AET+o95kGvvS9EFIosNqodiRQ6f2xKj2ubHPVdTbN3017RTLVDV34VFRI8qiIsOQ559evFfYfdLnTb4ioi2B9bMS2L4+MfImf1N1LOD1PeM+TWdvNJNkA4k8NRHeoR2Jac9epOp18qlMuo3gAVc+ebtR3X5+B24TMgpEv1Gu3/lhm+hMUFM4dNt5tzU2f+h6rU+ZvYABOP9Ns6VcggZuO7WeaqIVAP0NzO8d+HvsBzOqXbToVMPOeetWxO73u+VuzuuJtNW+kI9j7PJ0mezbjtb2xayY5m+MGGRcz+9zNJQoIZ/WTtCYVSBqjakXDCIpmaJENZeLfU08LNPthscj0+03mIdt8lDweq9F/VE8CXPagM+MvNx105hbw0i/oDlSjGV/iL7/AtS8y1vN8bgE2spJo1VACvcriYeEn6oHUaJIVaFCF/yC8J523L56oF3v0K+vj1LygKnJcf6FfLHvSgzhmfewD0afeOhZATPlU/feA+Q6JesFNuWATlPVWb5dm41DXTG2KIwnLOrzIvEEGKtwkuotyGET+SuPt5KxIYvVcfzbtvH0+ayGzFBS32sbJiT7vRRuXKyZvYbQWOm97UTqUD83Uyf1CPRzGbcNXyXIOuNcKPwQvSr00qwy9hPsVb2OUCTU9mTKAwcjbxM++KXwjvH6W3a0sOo9zjnO1O2fFH1HjRahvAH/3ltXRpzqqfdJ0xKP2kFqt2E3//0iPLgqqq17+i0H2/D7mWZxN+gX4d4v6Dyj+qn7+VP+5xPzB5YuV1Zcrr05fLX23Xv0pxRcLv1v4/cK3C6sLf174bmF34WThYiFYuFv4+8I/Fv65+q/Vf69+v/of0/Xzz6pzfrvg/Kz+9381k2of z j k AAAyMHiclVvZctvIFdVMtomSSWaSx7ygIrtmkpJVlu3K8jbaN2qnVtN2geAlCAub0U1QMov5jbwmv5CvSZ5Sec1X5HY3Gvc2CHkqqrKFPqdxge4+t+8hCPXzOBLy+fN/ffb5D374ox//5IufLv7s51/+4pdfff2rS5GNiwAugizOiuu+LyCOUriQkYzhOi/AT/oxXPXvNhR/VUIhoiztyocc3iR+mEbDKPAlQm96mxBLv1d+fHf39v27r5aerzzXP978wWp1sLRQ/Zy8+3r1y94gC8YJpDKIfSFerz7P5ZupX8goiGG22BsLyP3gzg/hNR6mfgLizVTf9cx7isjAG2YF/kulp1F+xtRPhHhI+tgz8eVINDkFtnGvx3L4pzfTKM3HEtLAXGg4jj2ZeWoKvEFUQCDjBzzwgyLCe/WCkV/4gcSJcq7ST5wxTGWEA5gtLj5VP97R1pV3uNbd9Ta3tveO9rp7x0fnnqYW2+51GX+rkYplFXbxqXfoF3eewFvBlRBeNvQCPzfHalIKGEJRRGmo7nsQlZGw3YZROC4A7zSFSZAliZ8Opj0EYxjK2XTag8T7toPHv5vN5voEuFRQ2F4butXWr4jCUR3sTDXaeskst326Wd7Wo59JmSW207puzfWrxu3bbv5jPfq2R/+xHoHtETzWY2B7DFQPXIZdHF2sRuj5HvZXuoAhptPAw7lJ3Bh4rMDZ69U3GKU/9JZWVRCMsq0Xxawaqg6WvTibQPEswORcWexhSD2tMFxanZoF/EsPW1MdoO10vN1I+vGKt41iEBJzSq29UCuGvIm4bSNuNyNqWk4ye82lF9VVhWc7eTiiqvHCnvFh7A/olKWXS6/mTluuz7FHL3moV3o450bVn5wOVL65+SoFnPloCWAnxJx9bs8+bzn7zJ6lc36S1Vm2Uk+MubrQM1Pn4CNT0ww4KgCaIVm8pZfzEWnWWOyX87H91ANcBHVyy5TBBzNm2+XxQTtxxnkOhafimDBbVZittjBrXuFPaN4bwZ49e+aXWTTwxkJtTdHQyzMhIiw3JnQe+5g6VfzH705tuDlmUssYFWNOr/r834OsAm3UgTa+NxCOOQ1B78GmrzAxNFzfEUrF0jbUs2ePygTvzo/DDAvMKGkZJ3Lm7upOnxwoCzU30jUbaq0llBW8vR4Ooo716c2g65y09r0nzU1qjptWNXKmPoWa21VHn1oUc35TvSf1+Sfu+Xak9QXwrtXxozdcCQ6iWIk1Vge4oWMHdVTFG8ZZVmhaHxleH1YdkOon09VmtZEFJsJs2lOVP/Dj6WazQ+nH0YB3eGeOi2RqqNlcSBCy/QTNzOoRQS5UjctFFGdpVZ/OMESWeKVfRD5mq9U3SH+qIt/LNCsSjPqkh9CTmZ3OokH7xPRdpk9M4DIBMQOXGRADLgPEDF1mSEzoMiExI5cZERO5TETMe5d5T8ydy9wRE7tMPNMyLhIvEpixaMQHD2qzMyu47L0fC+kNsvQb6SkvjHJ8UDuPszBeUsVO3dgpXTVzmYyY3GVyYj64zAdiCpcpiBEuI4iRLiOJGbvMmJjSZUpiJi4zIebeZe6JeXCZB2I+uszHmbF5NgGwMmf19l5WSTI1qdQfsrSp71uOTJbYHrrNeMZxuE8wy40yIJglRjkgmGVFCQSzlCiHBLN8KEOCWTKUI4JZJpRjglkalO8JZjlQ3hHMEqCMCY4ZnBCcMJhNNJ/hjGAm5jInmCm5/EAwk3FZEMw0XAqCBV9UgmX7nHDplgQz3ZYTgploy3uCmWLLB4KZXMuPBFutbsWgPlPrT3tFi27BiK51XwajvNadGYz8WvdmMBps3Z3BCLF1fwajxtYdGowkW/doMLps3aWRe3SfBqPQ1p0ajExb92owWm3u1pZLXC7h3KM7MRjptu7FYPTbuhuDEXHrfgxGya07Mhg5t+7JYDTduiuDEXbrvgxG3a07MxiJt+7NYHTeujuDEXvr/gxG8Y/v0JgLRRTUDiVZo/xYo7RJ1gleZ/AGwRsM3iR4k8FbBG8xeJvgbQbvELzD4F2Cdxm8R/Aeg/cJ3mfwAcEHDO4Q3GHwIcGHDD4i+IjBxwQfM/iE4BMGnxJ8yuAzgs8YfE7wOYO7BHcZfEHwBYMvCb5k8BXBVwy+JviawTcE3zD4luDbx7dXV3RgVMc0usb0q6XHuHXObbjcBuc2XW6Tc1sut8W5bZfb5tyOy+1wbtfldjm353J7nNt3uX3OHbjcAec6Ltfh3KHLHXLuyOWOOHfscsecO3G5E86dutwp585c7oxz5y53zrmuy3U5d+FyF5y7dLlLzl253BXnrl3umnM3LnfDuVuXs7K/5Bai/Aj6cwR+dn1en1tmKUzt51mLJWMD9RIqGqWIwsSvcH1MlLXLinKtclnBDOkbhCyKNiiIkDHRtgQRsiNldZNkQrQFQYSshzYeiJDh0HYDEbIZ2mQgQuZCWwtEyFJoQ4EIGQltIxCJ2RQZhEyDtgyIpGxqDUIGQdsDRMgWaFOACJkBbQUQKdjMG0SwCTcIlfuyWjG2XqVBqLTrwo4IFXRdzhGhMq6LOCJUvHXpRqTNqLoOtfTjfKTWW/+uxVn2K3FoXViQPoXRQ4uKiv2kP1BnmAMisgRChevfBGu1KqVaAAMigv8TZMVbCdfCVriVaOuBTKf8/qdKrLaFYg2ohUIdsEFNlUBtCwU6pBaKM6QWCnNELbxddq8oyPfUQjHesbmZKhHWI58qAdoWTiabRRRfxqZkqkRnWyi6D9RCwRVspqZKaPUETZXIbAsnmk0zCqykFoprQi0U1j21UFQP1EJBfZxVX4dhCb43uC6/qDMqu7roIkLFVpdaRKjE6gKLCBVWXVYRoXKqiykiVER1CUWESqcunIhQwdTlEhEqk7pIIkLFUZdGRKgk6oKICBVCXQYRofKnix8iVPR0yUOESp0udIhQgdPlDREqa7qoIULFTJcyRKiE6QKGCBUuXbYQoXKlixUiVKR0iUKESpMuTIhQQdLlCBEqQ7oIIXLLVpDqQp+XheRkVG3EPTxis2dTXzGdKv3rwbECdG4LEKqoC6lQ3yNvQhD7BaCoRmtqB8IrGh8ohpF6igppkA2iNMRg/jhWiBjWx8lsKtQD4HOQjwXoZ/Hg+8L072eYhM2HuKnQXx+aklrF0w+wq6FJYz1TwdQv1y1G+pcbFqMMkJsWoxyQWxajLJDbFqM8kDsWo0yQuxajXJB7FqNskPsWo3yQBxajjJAdi1FOyEOLUVbII4tRXshji1FmyBOLUW7IU4tRdsgzi1F+yHOLUYbIrsUoR+SFxShL5KXFKE/klcUoU+S1xShX5I3FKFvkrcWMWUMh7xR+PjJsaD8CB84nkXCdwaSLcIPBJI1wk8GkjnCLwSSQcJvBpJFwh8Ekk3CXwaSUcI/BJJZwn8Gkl/CAwSSZsMNgUk14yGASTnjEYNJOeMxgkk94wmBSUHjKYBJReMZg0lF4zmCSUthlMKkpvGAwCSq8ZDBpKrxiMMkqvGYwKSu8YTCJK7xlsP0wgFtbZdVE/YClz8Ql1gklbYkNQklaYpNQrayn3qb+kmMswPM9AdLDS8cw8LaWvT4EvsLlKBLeJBvHA4SwBZ7QX4mglxwXnnrxJ4sxkHoVBu5z9Jb6e177bfs2XZHUKXYIJXGKXUJJm2KPUJKm2CeUlCkOCCVhig6hpEtxSCjJUhwRSqoUx4SSKMUJoaRJcUooSVKcEUqKFOeEkiBFl1DSo7gglOQoLgklNYorQkmM4ppQ0qK4IZSkKG4JrZ/GpOj7QH+E8M1zmMoEAjmAjmv+lT1coxZKdZ1aKNENaqE0N6mFm90WtVBE29RC8exQC0WzSy0Uyx61UCT71EJxHFALRdGhForhkFoogiNq4eIfUwsX/YRauNin1MJFPqMWLu45tXBRu9TCxbygFi7iJbVw8a6ohYt2TS1crBtq4SLdsutVTqtyWWrJgC+ZNI4LtxSVv/pdPkxigy57k0iOsrH00O54EyxpORSuIQJyRI4bqi4vaw3ojnNGELRdgoZfAm2YoOGYQFsmaHgm0KYJGq4JtG2Chm8CbZyg4ZxAWydoeCfQ5gka7gm0fYKGfwJtoKDhoEBbKGh4KNAmChouCrSNgoaPAm2koOGkQFspaHgp0GYKGm4KtJ2Chp8Cbaig4ahAWypoeCrQpgoargq0rYKGrwJtrKDhrEBbK2h4K9DmChruCrS9goa/Am2wgDks/KSAJUcWY/DG6QCK+EG9zzTwpe+FkEKB1Ua1I4FK749V6XFlm6uus2n+btorkqlu6MKnokKSR0WEJc85v36tsP+gy51+Q0RdBOtjI7Z9eWTkS/yk7l7C6XnCe57M2m4myQYQf2ogukM9EtOau07V6eRTnXIZxQOoevZ0o777+gzcJmQWjHyhXrv1xzLTn6CgcO6w8W5rbvrU91idMn8DA3D6mWZLvwIJ3HRsP9NELQT6GZrbOfbz2A9gVr9s06mAmffUq47d6XXP35rVFW+reSMdwd7n6TTZsxmv7Y1dM8nZHDfIuJjZ524uUUA4q5+kNalA0hhVKxpGUDRDi2woE/+eelqg2Q+LRabfbzIP2eaj5PFYjf6jehLgsgedGX+56aAzt4CXfkF3oBrN+BJ/+QWufZGxnudzC7CRlUSrhhLoVRYPCz9RD6RGk6xAgyr8B+E96bx98US92KNfWR+n5gVVkeP6C/1i2ZMexDHrYx+IPvXWsQBiyqfqvwfMd0jUC27KBZugrLd6uzQbh7pmalMcSVjW4UXmDTJQ4SbRXZTDIPJXGm8nZ0USq+f6s2nn7fNZC5mloLjVNk5O9Hkv2rhcMXkLo7XQeduL0qF8aKZO7hfq4TBuG75KlnPAvVb4IXhR6qVZZegl3K94G6NMqOnJlAEMRt4mfvZN4Rvh9bPsbmXReZxznKvdOSt+jxovQn0D+Lu3rI4+1VHtk6YjHrWH1GrFbvr/R3p0UVBd9fJfDLLn9zHP4mzSL8C/W9R/QPFn9fOH+s8l5g8uX6ysvlx5dfpq6bv16k8pvlj4zcJvF75dWF3448J3C7sLJwsXC8HCh4W/Lvxt4e+r/1j95+q/V/9jun7+WXXOrxecn9X//g9Ow2y1 z j k AAAyKniclVvZctvIFdVMtomSSWaSx7ygIrtmkpJVlu3K8jbaN2qnVtN2geAlCAub0U1QMov5h7wmv5CvydtUXvMhud2Nxr0NQp6Kqmyhz2lcoLvP7XsIQv08joR8/vz7zz7/0Y9/8tOfffHzxV/88stf/fqrr39zKbJxEcBFkMVZcd33BcRRChcykjFc5wX4ST+Gq/7dhuKvSihElKVd+ZDDm8QP02gYBb5E6KpXfnx39/b9u6+Wnq881z/e/MFqdbC0UP2cvPt69cveIAvGCaQyiH0hXq8+z+WbqV/IKIhhttgbC8j94M4P4TUepn4C4s1U3+/Me4rIwBtmBf5LpadRfsbUT4R4SPrYM/HlSDQ5BbZxr8dy+Jc30yjNxxLSwFxoOI49mXlq8N4gKiCQ8QMe+EER4b16wcgv/EDiFDlX6SfOGKYywgHMFhefqh/vaOvKO1zr7nqbW9t7R3vdveOjc09Ti233uoy/1UjFsgq7+NQ79Is7T+Ct4BoILxt6gZ+bYzUpBQyhKKI0VPc9iMpI2G7DKBwXgHeawiTIksRPB9MegjEM5Ww67UHifdvB4z/MZnN9AlwqKGyvDd1q61dE4agOdqYabb1klts+3Sxv69HPpMwS22ldt+b6VeP2bTf/sR5926P/WI/A9gge6zGwPQaqBy7DLo4uViP0fA/7K13AEBNp4OHcJG4MPFbg7PXqG4zSH3pLqyoIRtnWi2JWDVUHy16cTaB4FmBariz2MKSeVhgurU7NAv6th62pDtB2Ot5uJP14xdtGMQiJOaXWXqgVQ95E3LYRt5sRNS0nmb3m0ovqqsKznTwcUdV4Yc/4MPYHdMrSy6VXc6ct1+fYo5c81Cs9nHOj6k9OByrf3HyVAs58tASwE2LOPrdnn7ecfWbP0jk/yeosW6knxlxd6Jmpc/CRqWkGHBUAzZAs3tLL+Yg0ayz2y/nYfuoBLoI6uWXK4IMZs+3y+KCdOOM8h8JTcUyYrSrMVluYNa/wJzTvjWDPnj3zyywaeGOhtqZo6OWZEBEWGhM6j31MnSr+43enNtwcM6lljIoxp1d9/u9BVoE26kAbPxgIx5yGoPdg01eYGBqu7wilYmkb6tmzR2WCd+fHYYYFZpS0jBM5c3d1p08OlIWaG+maDbXWEsoK3l4PB1HH+vRm0HVOWvvBk+YmNcdNqxo5U59Cze2qo08tijm/qd6T+vwT93w70voCeNfq+NEbrgQHUazEGqsD3NCxgzqq4g3jLCs0rY8Mrw+rDkj1k+lqs9rIAhNhNu2pyh/48XSz2aH042jAO7wzx0UyNdRsLiQI2X6CZmb1iCAXqsblIoqztKpPZxgiS7zSLyIfs9XqG6Q/VZHvZZoVCUZ90kPoycxOZ9GgfWL6LtMnJnCZgJiBywyIAZcBYoYuMyQmdJmQmJHLjIiJXCYi5r3LvCfmzmXuiIldJp5pGReJFwnMWLTggwe12ZkVXPbej4X0Bln6jfSUF0Y5Pqidx1kYL6lip27slK6auUxGTO4yOTEfXOYDMYXLFMQIlxHESJeRxIxdZkxM6TIlMROXmRBz7zL3xDy4zAMxH13m48zYPJsAWJmzensvqySZmlTqD1na1PctRyZLbA/dZjzjONwnmOVGGRDMEqMcEMyyogSCWUqUQ4JZPpQhwSwZyhHBLBPKMcEsDcr3BLMcKO8IZglQxgTHDE4IThjMJprPcEYwE3OZE8yUXH4gmMm4LAhmGi4FwYIvKsGyfU64dEuCmW7LCcFMtOU9wUyx5QPBTK7lR4KtVrdiUJ+p9ae9okW3YETXui+DUV7rzgxGfq17MxgNtu7OYITYuj+DUWPrDg1Gkq17NBhdtu7SyD26T4NRaOtODUamrXs1GK02d2vLJS6XcO7RnRiMdFv3YjD6bd2NwYi4dT8Go+TWHRmMnFv3ZDCabt2VwQi7dV8Go+7WnRmMxFv3ZjA6b92dwYi9dX8Go/jHd2jMhSIKaoeSrFF+rFHaJOsErzN4g+ANBm8SvMngLYK3GLxN8DaDdwjeYfAuwbsM3iN4j8H7BO8z+IDgAwZ3CO4w+JDgQwYfEXzE4GOCjxl8QvAJg08JPmXwGcFnDD4n+JzBXYK7DL4g+ILBlwRfMviK4CsGXxN8zeAbgm8YfEvw7ePbqys6MKpjGl1j+tXSY9w65zZcboNzmy63ybktl9vi3LbLbXNux+V2OLfrcruc23O5Pc7tu9w+5w5c7oBzHZfrcO7Q5Q45d+RyR5w7drljzp243AnnTl3ulHNnLnfGuXOXO+dc1+W6nLtwuQvOXbrcJeeuXO6Kc9cud825G5e74dyty1nZX3ILUX4E/TkCP7s+r88tsxSm9vOsxZKxgXoJFY1SRGHiV7g+JsraZUW5VrmsYIb0DUIWRRsURMiYaFuCCNmRsrpJMiHagiBC1kMbD0TIcGi7gQjZDG0yECFzoa0FImQptKFAhIyEthGIxGyKDEKmQVsGRFI2tQYhg6DtASJkC7QpQITMgLYCiBRs5g0i2IQbhMp9Wa0YW6/SIFTadWFHhAq6LueIUBnXRRwRKt66dCPSZlRdh1r6cT5S661/1+Is+5U4tC4sSJ/C6KFFRcV+0h+oM8wBEVkCocL1b4K1WpVSLYABEcH/CbLirYRrYSvcSrT1QKZTfv9TJVbbQrEG1EKhDtigpkqgtoUCHVILxRlSC4U5ohbeLrtXFOR7aqEY79jcTJUI65FPlQBtCyeTzSKKL2NTMlWisy0U3QdqoeAKNlNTJbR6gqZKZLaFE82mGQVWUgvFNaEWCuueWiiqB2qhoD7Oqq/DsATfG1yXX9QZlV1ddBGhYqtLLSJUYnWBRYQKqy6riFA51cUUESqiuoQiQqVTF05EqGDqcokIlUldJBGh4qhLIyJUEnVBRIQKoS6DiFD508UPESp6uuQhQqVOFzpEqMDp8oYIlTVd1BChYqZLGSJUwnQBQ4QKly5biFC50sUKESpSukQhQqVJFyZEqCDpcoQIlSFdhBC5ZStIdaHPy0JyMqo24h4esdmzqa+YTpX+9eBYATq3BQhV1IVUqO+RNyGI/QJQVKM1tQPhFY0PFMNIPUWFNMgGURpiMH8cK0QM6+NkNhXqAfA5yMcC9LN48ENh+vczTMLmQ9xU6K8PTUmt4ukH2NXQpLGeqWDql+sWI/3LDYtRBshNi1EOyC2LURbIbYtRHsgdi1EmyF2LUS7IPYtRNsh9i1E+yAOLUUbIjsUoJ+ShxSgr5JHFKC/kscUoM+SJxSg35KnFKDvkmcUoP+S5xShDZNdilCPywmKUJfLSYpQn8spilCny2mKUK/LGYpQt8tZixqyhkHcKPx8ZNrQfgQPnk0i4zmDSRbjBYJJGuMlgUke4xWASSLjNYNJIuMNgkkm4y2BSSrjHYBJLuM9g0kt4wGCSTNhhMKkmPGQwCSc8YjBpJzxmMMknPGEwKSg8ZTCJKDxjMOkoPGcwSSnsMpjUFF4wmAQVXjKYNBVeMZhkFV4zmJQV3jCYxBXeMth+GMCtrbJqon7A0mfiEuuEkrbEBqEkLbFJqFbWU29Tf8kxFuD5ngDp4aVjGHhby14fAl/hchQJb5KN4wFC2AJP6K9E0EuOC0+9+JPFGEi9CgP3OXpL/T2v/bZ9m65I6hQ7hJI4xS6hpE2xRyhJU+wTSsoUB4SSMEWHUNKlOCSUZCmOCCVVimNCSZTihFDSpDgllCQpzgglRYpzQkmQokso6VFcEEpyFJeEkhrFFaEkRnFNKGlR3BBKUhS3hNZPY1L0faA/QvjmOUxlAoEcQMc1/8oerlELpbpOLZToBrVQmpvUws1ui1ooom1qoXh2qIWi2aUWimWPWiiSfWqhOA6ohaLoUAvFcEgtFMERtXDxj6mFi35CLVzsU2rhIp9RCxf3nFq4qF1q4WJeUAsX8ZJauHhX1MJFu6YWLtYNtXCRbtn1KqdVuSy1ZMCXTBrHhVuKyl/9Lh8msUGXvUkkR9lYemh3vAmWtBwK1xABOSLHDVWXl7UGdMc5IwjaLkHDL4E2TNBwTKAtEzQ8E2jTBA3XBNo2QcM3gTZO0HBOoK0TNLwTaPMEDfcE2j5Bwz+BNlDQcFCgLRQ0PBRoEwUNFwXaRkHDR4E2UtBwUqCtFDS8FGgzBQ03BdpOQcNPgTZU0HBUoC0VNDwVaFMFDVcF2lZBw1eBNlbQcFagrRU0vBVocwUNdwXaXkHDX4E2WMAcFn5SwJIjizF443QARfyg3mca+NL3QkihwGqj2pFApffHqvS4ss1V19k0fzftFclUN3ThU1EhyaMiwpLnnF+/Vth/0OVOvyGiLoL1sRHbvjwy8iV+Uncv4fQ84T1PZm03k2QDiD81EN2hHolpzV2n6nTyqU65jOIBVD17ulHffX0GbhMyC0a+UK/d+mOZ6U9QUDh32Hi3NTd96nusTpm/gQE4/UyzpV+BBG46tp9pohYC/QzN7Rz7eewHMKtftulUwMx76lXH7vS652/N6oq31byRjmDv83Sa7NmM1/bGrpnkbI4bZFzM7HM3lyggnNVP0ppUIGmMqhUNIyiaoUU2lIl/Tz0t0OyHxSLT7zeZh2zzUfJ4rEb/UT0JcNmDzoy/3HTQmVvAS7+gO1CNZnyJv/wC177IWM/zuQXYyEqiVUMJ9CqLh4WfqAdSo0lWoEEV/oPwnnTevniiXuzRr6yPU/OCqshx/YV+sexJD+KY9bEPRJ9661gAMeVT9d8D5jsk6gU35YJNUNZbvV2ajUNdM7UpjiQs6/Ai8wYZqHCT6C7KYRD5K423k7MiidVz/dm08/b5rIXMUlDcahsnJ/q8F21crpi8hdFa6LztRelQPjRTJ/cL9XAYtw1fJcs54F4r/BC8KPXSrDL0Eu5XvI1RJtT0ZMoABiNvEz/7pvCN8PpZdrey6DzOOc7V7pwVf0SNF6G+AfzdW1ZHn+qo9knTEY/aQ2q1Yjf9/yM9uiiornr5LwbZ8/uYZ3E26Rfg3y3qP6D4q/r5U/3nEvMHly9WVl+uvDp9tfTdevWnFF8s/G7h9wvfLqwu/Hnhu4XdhZOFi4Vg4W7h7wv/WPjn6r9W/736/ep/TNfPP6vO+e2C87P63/8BGR9qMw== (a) PointsT oParts Encoder . A p p l e C on f i d e n t i a l –I n t e r n a l U s e O n l y r a n d om v i e w p oi n t s . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . FoldingNet G ✓ AAAyEHiclVvbctxIcuWuL7umLztrP/oFYUqxawfFEKWJ8D4u76TYvF+laY0Cjc5GQ8RNqGqQVEfvR+zr+kP85vCr/8C/4S9wVhYKmQWCmlhGjIg8pypRl5OVCRAzKtNE6dev//dnP/+Lv/yrv/7FL/9m+W//7u//4Vff/fofr1UxqyK4ioq0qG5HoYI0yeFKJzqF27KCMBulcDO62zL8TQ2VSor8Uj+W8DEL4zyZJFGoEbrd+zTUU9Dhp+9WXq+9pp/g6cV6c7Gy1Pycfvr16/8bjotolkGuozRU6of116X+OA8rnUQpLJaHMwVlGN2FMfyAl3mYgfo4pwEvgpeIjINJUeF/uQ4IlT3mYabUYzbCllmop6rLGbCP+2GmJ7/7OE/ycqYhj+yNJrM00EVgZh+MkwoinT7iRRhVCY41iKZhFUYa18i7yyjz5jDXCU5gsbz80vwExzs3wdHG5X6wvbN7cHxweXByfBEQtdw31lX8bWaqVo3b5ZfBUVjdBQqHgpuggmISRGFpr82iVDCBqkry2Ix7nNSJcs0mSTyrAEeaw31UZFmYj+dDBFOY6MV8PoQs+O0Ar/91sXjSJsKtgsq12iKrr12VxNPW2bkx+lrponRtLouyr8Wo0LrIXKNNsp60a+Ydumbhcy1GrsXouRaRaxE912LsWoxNC9yGfZxdamYYhAG2N7qACUbSOMC1yXwfeG3AxQ/rH9HLaBKsrBsn6GWXNsXuGqoOVoO0uIfqVYRxubY8RJe0rDBZWZ/bDfzDEK05OejrjsNNdJiuBbsoBqUxpszeK7NjyFuPu87jbtcj0fq+cPdcedPcVQWuUYAzaow3rseXWTjmLitvV75/0m217eOu3kpX39N0Lqyqv7kcqHw7+CYEvPXoceAWxPa+cL0venqfu14U8/dFG2Vr7cLYuytamTYGn1marsNpBdB1KfytvH3qkVdN+H771HeYB4CbYDr3LBl8sXN2TZ6ftOdnVpZQBcaPdbPTuNnpc7MRVOE9r3vH2atXr8K6SMbBTJmjKZkEZaFUgpnGui7TEEOn8f/86MyBW2Ik9czRMLZ70+bPnmTjaKt1tPWTjnDOeQx0Btu2yvoguB0RSsXRztWrV8/KBEcXpnGBCWaa9cwTOTu6ttE3JypcPZnphnO10ePKCd7dDyfR+vr2YXDpddr4yU5PFrXEQ6uZuVCfQe1wzdW3NsX276r3tO1/6vd3M21vgKM2188OuBEcJKkRa2ou8EDHBuaq8TdJi6Iimq4sT5dNA6RG2Xy9m210hYGwmA9N5o/CdL7dbVCHaTKWDT7Z6yqbW2rxxCUo3d+BmEU7IyiVyXGlStIib/LTOboosqAOqyTEaHX6xrJvbjw/6LyoMvT6YojQi4VbzqpDh8yMfGbETOQzETNjnxkzAz4DzEx8ZsJM7DMxM1OfmTKT+EzCzGef+czMnc/cMZP6TLogGVdZkCiMWKzBx4/msLM7uBp8nikdjIv8NzowtTDK8dGcPN7GBFnjO/d953zXwmcKZkqfKZn54jNfmKl8pmJG+YxiRvuMZmbmMzNmap+pmbn3mXtmHnzmgZlHn3lk5qvPfF3YMs8FAGbmoj3e6yZI5jaURhMRNu246eFItCBb8IKT8IhhERt1xLAIjHrMsIiKGhgWIVFPGBbxUMcMi2CopwyLSKhnDIswqD8zLGKgvmNYBECdMpwKOGM4E7BYaLnCBcNCzHXJsFBy/YVhIeO6YlhouFYMK7mpDOv+NZHSrRkWuq3vGRairR8YFoqtHxkWcq2/Muy0upOCeaamp72qR7dgRdd7LoNVXu/JDFZ+vWczWA32ns5ghdh7PoNVY+8JDVaSvWc0WF32ntLIPXtOg1Vo70kNVqa9ZzVYrXZPa8dlPpdJ7tmTGKx0e89isPrtPY3Birj3PAar5N4TGayce89ksJruPZXBCrv3XAar7t6TGazEe89msDrvPZ3Bir33fAar+OdPaIyFKonaCiXb4PjY4LDJNhneFPAWw1sC3mZ4W8A7DO8IeJfhXQHvMbwn4H2G9wV8wPCBgN8x/E7AhwwfCnjA8EDARwwfCfiY4WMBnzB8IuBThk8FfMbwmYDPGT4X8AXDFwK+ZPhSwFcMXwn4muFrAd8wfCPgW4ZvBfye4fcC/sDwh+ePV190YFUnNLoh9EvSE9ym5LZ8bkty2z63Lbkdn9uR3K7P7Upuz+f2JLfvc/uSO/C5A8m987l3kjv0uUPJDXxuILkjnzuS3LHPHUvuxOdOJHfqc6eSO/O5M8md+9y55C587kJylz53Kbkrn7uS3LXPXUvuxuduJHfrc7eSe+9z7yX3weec7K9lCVF/BXqOwGfX123fushh7p5nHZbNLDTMOGm0NbHB/Xq4bmCBjCzCdQhVIYhw9UG1ByJcc9TNSLjSoDoDEa4vqLpAhKsKqikQ4VqCKglEuIKg+gERrhuoakCEqwWqFRBJxTpYhCsDqgsQycX6WYSrAKoBEOHcT5kfEc74lO8R4TxPWR4RJRbcIpzT62ZbxKbUFuH8TdkbEc7alLMR4VxNmRoRztCUnxHpq0b9MrQO03Jq9pt+twqsR404SBcO5EctfjPRUGmYjcamh71gosggNjj9ZpgkaeToAHSICP7LkErizHSl3ww74TaibScyn8vxz41YnYVijdhCoY7FpOZGoM5CgU7YQnHGbKEwp2zhcMVYUZCf2UIx3om1mRsRtjOfGwE6CxdTrCKKrxBLMjeicxaK7gtbKLhKrNTcCK1doLkRmbNwocUyo8BqtlBc92yhsB7YQlE9soWC+rpo/uaFefbB4pRjUWecWymzIsIZlfIpIpxHKYsiwtmTcicinDMpYyLCmZLyJCKcHyk7IsJZkXIiIpwLKRMiwhmQ8h8inPco6yHC2Y5yHSKc4yjDIcKZjfIaIpzPKJshwlmMchginLsocyHCGYvyFSKcpyhLIcLZiXITIpyTKCMhwpmI8hAinH8o+yDCWYdyDiKcayjTIPJB7CDnhZFMC9nptDmIh3glVs+FvmEGTfi3k2ti2HAXNo5JRZeQK/PH4m2I0rACFNV0w5xAeEdb7KlJYl6VQh4V4ySP0Vk4Sw2iJu11tpgr85b3AvRzDkZFOv4pN6OHBQZh901truhvhDZvNv7oLXUzNW3ry1wJ9etNh7H+9ZbDOAL0tsM4BvSOwzgK9K7DOA70nsM4EvS+wzgW9IHDOBr0O4dxPOhDh3FE6IHDOCb0kcM4KvSxwzgu9InDODL0qcM4NvSZwzg69LnDOD70hcM4QvSlwzhG9JXDOEr0tcM4TvSNwzhS9K3DOFb0e4dxtOgPDrMVGQp5rwrLqWVj95wbeY8b8aaAWRfxloBZGvG2gFkd8Y6AWSDxroBZI/GegFkm8b6AWSnxgYBZLPE7AbNe4kMBs2TigYBZNfGRgFk48bGAWTvxiYBZPvGpgFlB8ZmAWUTxuYBZR/GFgFlK8aWAWU3xlYBZUPG1gFlT8Y2AWVbxrYBZWfF7AbO44g8CdhU/Hm1NqabatygjIS61yShrS20xytJS24ySsl4G2/SXjJmCIAwU6ABvncI42FkNRhCFBtfTRAX3xSwdI4QWBIr+7oG15KwKzNc9RYqOzPcu8FBibUl/zHV/Ut/lO7I61R6jLE61zyhrUx0wytJU7xhlZapDRlmYasAo61IdMcqyVMeMsirVCaMsSnXKKGtSnTHKklTnjLIi1QWjLEh1ySjrUV0xynJU14yyGtUNoyxGdcsoa1G9Z5SlqD4w2r5yybHuA3qECO3LlqYIBK4ABn7xb8rDDbZQqptsoUS32EJpbrOFh90OWyiiXbZQPHtsoWj22UKxHLCFInnHForjkC0UxYAtFMMRWyiCY7Zw80/Ywk0/ZQs3+4wt3ORztnBzL9jCTb1kCzfzii3cxGu2cPNu2MJNu2ULN+s9W7hJH8T9mkqrqbLMloHcMm0rLjxSTPzSB3sYxBZdDe4TPS1mOsByJ7jHlFZC5RdEwBWRVw01t9etBqjhk0IQqFyCTr0EVDBBp2ICKpmgUzMBFU3QqZqAyibo1E1AhRN0Kieg0gk6tRNQ8QSd6gmofIJO/QRUQEGnggIqoaBTQwEVUdCpooDKKOjUUUCFFHQqKaBSCjq1FFAxBZ1qCqicgk49BVRQQaeiAiqpoFNTARVV0KmqgMoq6NRVQIUVdCoroNIKOrUVUHEFneoKqLyCTn0FVGCBqLDwSQFTjq5mEMzyMVTpo/loaRzqMIghhwqzjbEThUofzUzq8WVbmqaLeflpPqyyORmU+IxXyMqkSjDlef3bbwdHj5Tu6DMQcxPMjx3f7guRaajxSd2/hdfyVLY8XfQNJivGkH5rItSgnYm1ntynaXT6rUalTtIxNC2HZLSjb3vgMaGLaBoq821tONMFPUFB5Y2w8wFradu0Y2y6PB3AGLx21uxpVyGBh45rZ03UQkTv0PzGaVimYQSL9ouaQQMsgpdBc+0vr99/Z9FmvJ3uQAZKfLQz6LLnC5nbO6dmVoo17pBptXDv3XyignjRvknrUpHmORormSRQdV2rYqKz8IFbOqDbDpNFQR8x2ZdsT72U6czM/qt5E+Czh4OF/ILpcPBkA6/DikdgjK5/jb/CCve+KkTLiycbsFXUTBvDCPSmSCdVmJkXUtP7osICVYWPKngx+PHNC/P1Dn2XPsvtV6iqxP1X9PXYiyGkqWjjXoi+DDYxAWLI5+afR4x3yMxXbKYKtk5Fa/MJaTGLKWdSUZxoWCX3qgjGBRh398ldUsI4Cdc6nyAXVZaal/eL+eDH14sessjBcOt9nL6nfm/6uNIwZQ9DWhj8OEzyiX7shk4ZVublMB4boQmWC8CzVoUxBEke5EVT0Gt4WAu2poUyy1OYAjCaBtv47JvDb1QwKoq7tWXvdc5JaU7novo31HgV0wDw93DVXH2roTknbUO86ndJasVm9O8zLS5RUJfmC78U9DAcYZylxf2ogvBu+dN3K+vd/yfi6cX1m7X1t2tvzr5f+f3vmv9f4pdL/7z0L0u/XVpf+vel3y/tL50uXS1FS+nSH5f+tPQf639c/8/1/1r/b9v05z9r+vzTkvez/j//D2A6X54= v j q AAAyD3iclVvbctvIEdXmulFuu8ljXlCRXbtJySrJ3qrs4+p+oyRK1N20XSDYBGHhZswQlMxi/mFfkw/JWyqv+YT8Rr4gPTMYdA8EeSuqsoQ+Z6Yxl9PTTRAe5HEk5Orqfz770Y9/8tOf/fzzXyz+8le//s1vv/jyd5cimxQBXARZnBXXA19AHKVwISMZw3VegJ8MYrga3G0q/qqEQkRZei4fcniT+GEajaLAlwhd9cvy3Ye37999sbS6sqp/vMcXa9XF0kL103335ep/+8MsmCSQyiD2hXi9tprLNzO/kFEQw3yxPxGQ+8GdH8JrvEz9BMSbmR7v3HuOyNAbZQX+S6WnUd5j5idCPCQDbJn4ciyanALbuNcTOfr2zSxK84mENDA3Gk1iT2aemrw3jAoIZPyAF35QRDhWLxj7hR9IXCLnLoPEmcNMRjiB+eLic/XjHW9feUfr53ve1vbO/vH++f7Jcc/T1GLbWJfxr5qpWFZuF597R35x5wkcCu6B8LKRF/i5uVaLUsAIiiJKQzXuYVRGwjYbReGkABxpCtMgSxI/Hc76CMYwkvPZrA+J93UHr/80nz9qE+BWQWFbbWqrrV0RhePa2Zky2lrJLLdtzrO8rcUgkzJLbKMNbT1qV83bt838p1oMbIvBUy0C2yJ4qsXQthiqFrgNezi7WM3Q8z1sr3QBIwykoYdrk7g+8FqB89drb9DLYOQtrSkn6GVHb4rZNVQdLHtxNoXiRYBhubLYR5d6WWG0tDYzG/jXPloz7aCtOw43kn684u2gGITEmFJ7L9SOIW887liPO02PmpbTzN5z6WV1V+HZRh7OqDJe2h4fJv6Quiy9WvrmUbfluo+9esVdfaOn0zOq/uRyoPLN4KsQcNajxYFdENO7Z3v3Wnqf2V465qdZHWUr9cKYuwu9MnUMPrE0TYfjAqDpkvlbevXYI60a8/3qsW8/9QA3QXVuWTL4YOZsmzw9acfPJM+h8JQf42a7crPd5mbdK/wprXvD2YsXL/wyi4beRKijKRp5eSZEhInGuM5jH0On8v/06NSBm2MktcxRMaZ71eb/nmTlaLN2tPmDjnDOaQj6DDZthfGh4XpEKBVLW1cvXjwpExydH4cZJphx0jJP5Mzo6kafnChz9Wim69bVeosrK3h7P5xE7evTh8G502n9Bzs9WtQcD61q5kx9CjXDVVef2hTTv6nebt2/6/a3M61vgKNW108OuBIcRLESa6wu8EDHBuqq8jeKs6zQtL4yvL6sGiA1SGZrzWwjCwyE+ayvMn/gx7OtZoPSj6Mhb/DOXBfJzFDzRy5ByPYOmpnXM4JcqByXiyjO0io/naGLLPFKv4h8jFarb5D+THm+l2lWJOj1WR+hZ3O7nEWD9okZuMyAmMBlAmKGLjMkBlwGiBm5zIiY0GVCYsYuMyYmcpmImPcu856YO5e5IyZ2mXiuZVwkXiQwYrEEHz6ow87s4LL3fiKkN8zSr6SnamGU44M6eZyN8ZLKd+r6TumumctkxOQukxPzwWU+EFO4TEGMcBlBjHQZSczEZSbElC5TEjN1mSkx9y5zT8yDyzwQ89FlPs5NmWcDADNzVh/vZRUkMxNKgxELm3rccmyixLbQNuMZx+EBwSw2yoBgFhjlkGAWFSUQzEKiHBHM4qEMCWbBUI4JZpFQTghmYVC+J5jFQHlHMAuAMiY4ZnBCcMJgttB8hTOCmZjLnGCm5PIDwUzGZUEw03ApCBZ8UwmW7WvCpVsSzHRbTglmoi3vCWaKLR8IZnItPxJstbodg/pMrT/tFS26BSO61nMZjPJaT2Yw8ms9m8FosPV0BiPE1vMZjBpbT2gwkmw9o8HosvWURu7JcxqMQltPajAybT2rwWi1eVpbLnG5hHNPnsRgpNt6FoPRb+tpDEbErecxGCW3nshg5Nx6JoPRdOupDEbYrecyGHW3nsxgJN56NoPReevpDEbsreczGMU/fUJjLBRRUFcoyTrFxzqFTbJB8AaDNwneZPAWwVsM3iZ4m8E7BO8weJfgXQbvEbzH4H2C9xl8QPABgw8JPmRwh+AOg48IPmLwMcHHDD4h+ITBXYK7DD4l+JTBZwSfMbhHcI/B5wSfM/iC4AsGXxJ8yeArgq8YfE3wNYNvCL5h8C3Bt08fr67owKiOaXSd6VdLj3EbnNt0uU3ObbncFue2XW6bczsut8O5XZfb5dyey+1xbt/l9jl34HIHnDt0uUPOdVyuw7kjlzvi3LHLHXPuxOVOONd1uS7nTl3ulHNnLnfGuZ7L9Th37nLnnLtwuQvOXbrcJeeuXO6Kc9cud825G5e74dyty1nZX/ISovwI+nMEfnZdrfuWWQoz+3nWYsnEQP2EkkZdEyvcrYfLCmbIwCBUh+gqBBGqPnTtgQjVHGU1Eqo0dJ2BCNUXurpAhKoKXVMgQrWEriQQoQpC1w+IUN2gqwZEqFrQtQIiMVsHg1BloOsCRFK2fgahKkDXAIhQ7teZHxHK+DrfI0J5Xmd5RARbcINQTi+rbWGbUhqE8rfO3ohQ1tY5GxHK1TpTI0IZWudnRNqqUbcMLf04H6v91n9rBZaDShxaFxakj1r0ZKKiYj8ZDFUPc0FElkCocP2XYC1JJUcLoENE8DdBIgoT1VX/JdgKtxJtPZHZjI9/psRqLRRrQBYKdcgmNVMCtRYKdEQWijMkC4U5JguHy8aKgnxPForxjq3NTImwnvlMCdBauJhsFVF8GVuSmRKdtVB0H8hCwRVspWZKaPUCzZTIrIULzZYZBVaSheKakoXCuicLRfVAFgrq47z6zgvz7L3BdY5FnVFu1ZkVEcqoOp8iQnlUZ1FEKHvq3IkI5UydMRGhTKnzJCKUH3V2RISyos6JiFAu1JkQEcqAOv8hQnlPZz1EKNvpXIcI5Tid4RChzKbzGiKUz3Q2Q4SymM5hiFDu0pkLEcpYOl8hQnlKZylEKDvp3IQI5SSdkRChTKTzECKUf3T2QYSyjs45iFCu0ZkGkVu2g5QXBjwtJN1xdRD38Yqtng19xXSq8K8nV8Ww4nomjrWKziEV6sviLQhivwAU1XhdnUB4R1PsiVGkHpVCGmTDKA3RmT+JFSJG9XUynwn1lLcH8ikHgywe/pCbwf0cg7D5pDYV+jtCkzcrf/opdTU1aerLVDD1yw2Lkf7lpsUoAuSWxSgG5LbFKArkjsUoDuSuxSgS5J7FKBbkvsUoGuSBxSge5KHFKCJkx2IUE/LIYhQV8thiFBfyxGIUGbJrMYoNeWoxig55ZjGKD9mzGEWIPLcYxYi8sBhFiby0GMWJvLIYRYq8thjFiryxGEWLvLWYqchQyLuFn48NG9rPuYHzcSPcYDDpItxkMEkj3GIwqSPcZjAJJNxhMGkk3GUwySTcYzApJdxnMIklPGAw6SU8ZDBJJuwwmFQTHjGYhBMeM5i0E54wmOQTdhlMCgpPGUwiCs8YTDoKewwmKYXnDCY1hRcMJkGFlwwmTYVXDCZZhdcMJmWFNwwmcYW3DLYVPx5tVakm6qcoAyYusUEoaUtsEkrSEluEamU997b0NxkTAZ7vCZAe3jqGobe97A0g8BUux5HwptkkHiKEFnhCf++BteSk8NTbPVmMjtT7LnCfY22pv8y1X6nv0B1JnWKXUBKn2COUtCn2CSVpigNCSZnikFASpugQSroUR4SSLMUxoaRKcUIoiVJ0CSVNilNCSZLijFBSpOgRSoIU54SSHsUFoSRHcUkoqVFcEUpiFNeEkhbFDaEkRXFLaP3IJcW6D/RHCN88bKmKQKAKoOMW/6o8XCcLpbpBFkp0kyyU5hZZeNhtk4Ui2iELxbNLFopmjywUyz5ZKJIDslAch2ShKDpkoRiOyEIRHJOFm39CFm56lyzc7FOycJPPyMLN7ZGFm3pOFm7mBVm4iZdk4eZdkYWbdk0WbtYNWbhJt+x+VaVVVVlqy4BvmTQVFx4pKn71C3sYxAZd9qaRHGcT6WG5400xpeVQuAURUEXkVEPV7WWtAd3wUSEIulyCRr0EumCCRsUEumSCRs0EumiCRtUEumyCRt0EunCCRuUEunSCRu0EuniCRvUEunyCRv0EuoCCRgUFuoSCRg0FuoiCRhUFuoyCRh0FupCCRiUFupSCRi0FupiCRjUFupyCRj0FuqCCRkUFuqSCRk0FuqiCRlUFuqyCRl0FurCCRmUFurSCRm0FuriCRnUFuryCRn0FusACVmHhJwVMObKYgDdJh1DED+qlpaEvfS+EFArMNsqOBCp9MFGpx5VtrprOZ/m7Wb9IZtrQiU95hSSPighTntO/fndw8KDTnX4NRN0E82PDt31DZOxL/KTu3sJp2eUtu/O2wSTZEOJPTUQ3qGdirEf3qRp1P9Uol1E8hKplXxv16OseeEzILBj7Qr1b609kpj9BQeGMsPECa27a1GOsujwewBCcdsZsaVcggYeObWdM1EKgn6G5jWM/j/0A5vUbNZ0KmHvPveraXV63//a8znjbzYF0BHtpp9Nkz+Y8tzdOzSRna9wg42Jun7u5RAHhvH6S1qQCSXNUVjSKoGi6FtlIJv49tbRAsx0mi0y/xGQesj32kscTNfuP6kmAyx525vwNpsPOow289AsagTKa/iX+8Qvc+yJjLXuPNmAzK4lWhhLoVRaPCj9RD6TG06zAAlX4D8J71nn78pl6e0e/lz5JzVuoIsf9F/rtsWd9iGPWxj4Qfe5tYALEkE/VrweMd0jUW2yqCjZOWWv1Cmk2CXXO1EVxJGFZuxeZN8xAuZtGd1EOw8hfabyCnBVJrB7ez2edt6vzFjJLQXFrbZyc6n4v27hcMXkLo7XQeduP0pF8aIZO7hfq4TAeG74Klh7gWSv8ELwo9dKsKugl3K94m+NMqOXJVAEYjL0t/OybwlfCG2TZ3cqi8zjnJFenc1b8GTVehHoA+Le/rK4+1VCdk6YhXrW71GrFZvr3Ey3OUVDn6g2/GGTfH2Ccxdl0UIB/t/jui6W15v+JeHxx+XJl7dXKy9Nvlr77tvr/Ep8v/GHhjwtfL6wt/GXhu4W9he7CxUKwcLfw/cLfFv6+9v3aP9b+ufYv0/RHn1V9fr/g/Kz9+38s2l9c v j f ⇠ N ( µ j , j ) AAAyUniclVvbctzGEV3HuTiMncjJY16QUCrbKYolUq6KH837bXm/UyupsNheLEjchJkFSW1tfiJfk9fkF/KSX8lTemYw6B4sKFdYJRJzzqCBmTk9fRYL9fM4EvLVq/989rPPf/6LX/7qi1/P/ebLr377u2df//5CZOMigPMgi7Piqu8LiKMUzmUkY7jKC/CTfgyX/bs1xV+WUIgoS8/kYw5vEz9Mo2EU+BKh989e9sry/fDdbe9PPREl+Dvx5Sjw48nB9NtemYzf3S54vVJEYeK/u/3u/bP5V4uv9I83e7BUHcx3qp+j918vfdUbZME4gVQGsS/Em6VXuXw78QsZBTFM53pjAbkf3PkhvMHD1E9AvJ3ocU29F4gMvGFW4L9UehrlZ0z8RIjHpI891W2LJqfANu7NWA5/eDuJ0nwsIQ3MhYbj2JOZpybJG0QFBDJ+xAM/KCK8Vy8Y+YUfSJxK5yr9xBnDREY4gOnc3Av14x1sXHr7K2fb3vrG5s7BztnO4cGpp6m5tntdwL9qpGJBhZ174e37xZ0n8FZwrYSXDb3Az82xmpQChlAUURqq+x5EZSRst2EUjgvAO03hPsiSxE8Hkx6CMQzldDLpQeJ928Xj76bTmT4BLhUUtteabrX1K6JwVAc7UY22XjLLbZ+zLG/r0c+kzBLbaVW3ZvpV4/ZtN/+pHn3bo/9Uj8D2CJ7qMbA9BqoHLsM2ji5WI/R8D/srXcAQE27g4dwkbgw8VuD0zdJbjNIfevNLKghG2dSLYlYNVQcLXpzdQ/EywPRdnOthSD2tMJxfmpgF/FsPWxMdoO10vN1I+vGit4liEBJzSq29UCuGvIm4aSNuNiNqWt5n9przy9VVhWc7eTiiqrFsz/gw9gd0yvzr+e9nTluoz7FHr3mo7/VwTo2qPzkdqHxz81UKOPPREsBOiDn71J592nL2iT1L5/x9VmfZYj0x5upCz0ydg09MTTPgqABohmTx5l/PRqRZY7Ffz8b2Uw9wEdTJLVMGH8yYbZenB+3EGec5FJ6KY8JsVGE22sKseIV/T/PeCPby5Uu/zKKBNxZqa4qGXp4JEWFBMqHz2MfUqeI/fXdqw80xk1rGqBhzetXn/x5kFWitDrT2k4FwzGkIeg82fYWJoeH6jlAqlrahXr58UiZ4d34cZlhgRknLOJEzd1d3+uRAWaiZka7YUCstoazg7fVwEHWsT28GZ85JKz950syk5rhpVSNn6lOouV119KlFMec31XtUn3/knm9HWl8A71odP3nDleAgipVYY3WAGzp2UEdVvGGcZYWm9ZHh9WHVAal+MllqVhtZYCJMJ7XjWm92KP04GvAO781xkUwMNZ0JCUK2n6CZaT0iyIWqcbmI4iyt6tMJhsgSr/SLyMdstfoG6U9U5AeZZkWCUZ/3EHo+tdNZNGifmL7L9IkJXCYgZuAyA2LAZYCYocsMiQldJiRm5DIjYiKXiYi5dZlbYu5c5o6Y2GXiqZZxkXiRwIxFqz54VJudWcEF73YspDfI0m+kp7wwyvFR7TzOwnhJFTt1Y6d01cxlMmJyl8mJ+eAyH4gpXKYgRriMIEa6jCRm7DJjYkqXKYm5d5l7Yh5c5oGYR5d5JOajy3ycGptnEwArc1Zv72WVJBOTSv0hS5v6vuXIZIntoduMZxyH+wSz3CgDgllilAOCWVaUQDBLiXJIMMuHMiSYJUM5IphlQjkmmKVBeUswy4HyjmCWAGVMcMzghOCEwWyi+QxnBDMxlznBTMnlB4KZjMuCYKbhUhAs+KISLNvnhEu3JJjptrwnmIm2fCCYKbZ8JJjJtfxIsNXqRgzqM7X+tFe06BaM6Fr3ZTDKa92ZwcivdW8Go8HW3RmMEFv3ZzBqbN2hwUiydY8Go8vWXRq5J/dpMApt3anByLR1rwaj1eZubbnE5RLOPbkTg5Fu614MRr+tuzEYEbfux2CU3Lojg5Fz654MRtOtuzIYYbfuy2DU3bozg5F4694MRuetuzMYsbfuz2AU//QOjblQREHtUJIVyo8VSptkleBVBq8RvMbgdYLXGbxB8AaDNwneZPAWwVsM3iZ4m8E7BO8weJfgXQbvEbzH4C7BXQbvE7zP4AOCDxh8SPAhg48IPmLwMcHHDD4h+ITBpwSfMviM4DMGnxN8zuALgi8YfEnwJYOvCL5i8DXB1wy+Ifjm6e3VFR0Y1TGNrjD9aukxbpVzay63xrl1l1vn3IbLbXBu0+U2Obflcluc23a5bc7tuNwO53Zdbpdzey63x7muy3U5t+9y+5w7cLkDzh263CHnjlzuiHPHLnfMuROXO+Hcqcudcu7M5c44d+5y55y7cLkLzl263CXnrlzuinPXLnfNuRuXs7K/4Bai/Aj6cwR+dn1Vn1tmKUzs51mLJWMD9RIqGuY7gwrXx0RZu6wo1yqXFcyQvkHIomiDgggZE21LECE7UlY3SSZEWxBEyHpo44EIGQ5tNxAhm6FNBiJkLrS1QIQshTYUiJCR0DYCkZhNkUHINGjLgEjKptYgZBC0PUCEbIE2BYiQGdBWAJGCzbxBBJtwg1C5L6sVY+tVGoRKuy7siFBB1+UcESrjuogjQsVbl25E2oyq61BLP85Har3131qcZb8Sh9aFBelTGD20qKjYT/oDdYY5ICJLIFS4/kuwVqtSqgUwICL4myAr3kq4FrbCrURbD2Qy4fc/UWK1LRRrQC0U6oANaqIEalso0CG1UJwhtVCYI2rh7bJ7RUHeUgvFeMfmZqJEWI98ogRoWziZbBZRfBmbkokSnW2h6D5QCwVXsJmaKKHVEzRRIrMtnGg2zSiwkloorntqobAeqIWieqQWCurjtPo6DEvwg8F1+UWdUdnVRRcRKra61CJCJVYXWESosOqyigiVU11MEaEiqksoIlQ6deFEhAqmLpeIUJnURRIRKo66NCJCJVEXRESoEOoyiAiVP138EKGip0seIlTqdKFDhAqcLm+IUFnTRQ0RKma6lCFCJUwXMESocOmyhQiVK12sEKEipUsUIlSadGFChAqSLkeIUBnSRQiRG7aCVBf6vCwkR6NqI+7hEZs9m/qK6VbpXw+OFaBTW4BQRWeQCvU98joEsV8Aimq0onYgvKLxgWIYqaeokAbZIEpDDOaPY4WIYX2cTCdCPQA+BflUgH4WD34qTP9hiknYfIibCv31oSmpVTz9ALsamjTWMxVM/XLVYqR/uWYxygC5bjHKAblhMcoCuWkxygO5ZTHKBLltMcoFuWMxyga5azHKB7lnMcoI2bUY5YTctxhlhTywGOWFPLQYZYY8shjlhjy2GGWHPLEY5Yc8tRhliDyzGOWIPLcYZYm8sBjliby0GGWKvLIY5Yq8thhli7yxmDFrKOStws9Hhg3tR+DA+SQSrjKYdBGuMZikEa4zmNQRbjCYBBJuMpg0Em4xmGQSbjOYlBLuMJjEEu4ymPQS7jGYJBN2GUyqCfcZTMIJDxhM2gkPGUzyCY8YTAoKjxlMIgpPGEw6Ck8ZTFIKzxhMagrPGUyCCi8YTJoKLxlMsgqvGEzKCq8ZTOIKbxhsPwzg1lZZNVE/YOkzcYlVQklbYo1QkpZYJ1Qr64W3rr/kGAvwfE+A9PDSMQy8jQWvD4GvcDmKhHefjeMBQtgCT+ivRNBLjgtPvfiTxRhIvQoDDzl6S/09r/22fZOuSOoUW4SSOMU2oaRNsUMoSVPsEkrKFHuEkjBFl1DSpdgnlGQpDgglVYpDQkmU4ohQ0qQ4JpQkKU4IJUWKU0JJkOKMUNKjOCeU5CguCCU1iktCSYziilDSorgmlKQobgitn8ak6PtAf4TwzXOYygQCOYCua/6VPVyhFkp1lVoo0TVqoTTXqYWb3Qa1UESb1ELxbFELRbNNLRTLDrVQJLvUQnHsUQtF0aUWimGfWiiCA2rh4h9SCxf9iFq42MfUwkU+oRYu7im1cFHPqIWLeU4tXMQLauHiXVILF+2KWrhY19TCRbph16ucVuWy1JIBXzJpHBduKSp/9bt8mMQGXfDuIznKxtJDu+PdY0nLoXANEZAjctxQdXlZa0B3nDGCoO0SNPwSaMMEDccE2jJBwzOBNk3QcE2gbRM0fBNo4wQN5wTaOkHDO4E2T9BwT6DtEzT8E2gDBQ0HBdpCQcNDgTZR0HBRoG0UNHwUaCMFDScF2kpBw0uBNlPQcFOg7RQ0/BRoQwUNRwXaUkHDU4E2VdBwVaBtFTR8FWhjBQ1nBdpaQcNbgTZX0HBXoO0VNPwVaIMFzGHhJwUsObIYgzdOB1DEj+p9poEvfS+EFAqsNqodCVR6f6xKjyvbXHWdTvL3k16RTHRDFz4VFZI8KiIsec759WuF/Udd7vQbIuoiWB8bse3LIyNf4id19xJOzyPe82jadjNJNoD4UwPRHeqRmNbMdapOR5/qlMsoHkDVs6cb9d3XZ+A2IbNg5Av12q0/lpn+BAWFc4eNd1tz06e+x+qU2RsYgNPPNFv6FUjgpmP7mSZqIdDP0NzOsZ/HfgDT+mWbbgVMvRdedexOr3v+xrSueBvNG+kK9j5Pt8meTHltb+yaSc7muEHGxdQ+d3OJAsJp/SStSQWSxqha0TCCohlaZEOZ+A/U0wLNflgsMv1+k3nINhslj8dq9B/VkwCX3etO+ctNe92ZBbzwC7oD1WjGl/jHL3Dti4z1PJ1ZgLWsJFo1lEAvs3hY+Il6IDW6zwo0qMJ/FN7z7rvl5+rFHv3K+jg1L6iKHNdf6BfLnvcgjlkf+0D0hbeKBRBTPlW/HjHfIVEvuCkXbIKy3urt0mwc6pqpTXEkYUGHF5k3yECFu4/uohwGkb/YeDs5K5JYPdefTrrvXk1byCwFxS21cfJen7fcxuWKyVsYrYXuu16UDuVjM3Vyv1APh3Hb8FWynALutcIPwYtSL80qQy/hYdFbG2VCTU+mDGAw8tbxs28K3wivn2V3i3PO45zDXO3OWfEX1HgR6hvAv70FdfSpjmqfNB3xqD2kVit207+f6HGGgjpTL//FIHt+H/Mszu77Bfh3c++fzS81/7vE7MHF8uLS68Xl4+/nf/yh+q8UX3T+2Plz59vOUuevnR87252jznkn6Py984/OPzv/Wvr30n+XP1v+3HT92WfVOX/oOD/LX/4PoW12ew== Y j AAAyC3iclVvbctvIEdXmulFuu8ljXlCRXbtJySrJ3qrs4+p+oyRK1N20XSDYBGHhZswQlMxi/mBfkw/JWyqv+Yj8Rr4gPTMYdA8EeSuqsoQ+Z6Yxl9PTTRAe5HEk5Orqfz770Y9/8tOf/fzzXyz+8le//s1vv/jyd5cimxQBXARZnBXXA19AHKVwISMZw3VegJ8MYrga3G0q/qqEQkRZei4fcniT+GEajaLAlwj1bt6+f/fF0urKqv7xHl+sVRdLC9VP992Xq//tD7NgkkAqg9gX4vXaai7fzPxCRkEM88X+REDuB3d+CK/xMvUTEG9meqxz7zkiQ2+UFfgvlZ5GeY+ZnwjxkAywZeLLsWhyCmzjXk/k6Ns3syjNJxLSwNxoNIk9mXlq4t4wKiCQ8QNe+EER4Vi9YOwXfiBxeZy7DBJnDjMZ4QTmi4vP1Y93vH3lHa2f73lb2zv7x/vn+yfHPU9Ti21jXca/aqZiWbldfO4d+cWdJ3AouP7Cy0Ze4OfmWi1KASMoiigN1biHURkJ22wUhZMCcKQpTIMsSfx0OOsjGMNIzmezPiTe1x28/tN8/qhNgFsFhW21qa22dkUUjmtnZ8poayWz3LY5z/K2FoNMyiyxjTa09ahdNW/fNvOfajGwLQZPtQhsi+CpFkPbYqha4Dbs4exiNUPP97C90gWMMIiGHq5N4vrAawXOX6+9QS+Dkbe0ppyglx29KWbXUHWw7MXZFIoXAYbkymIfXeplhdHS2sxs4F/7aM20g7buONxI+vGKt4NiEBJjSu29UDuGvPG4Yz3uND1qWk4ze8+ll9VdhWcbeTijynhpe3yY+EPqsvRq6ZtH3ZbrPvbqFXf1jZ5Oz6j6k8uByjeDr0LAWY8WB3ZBTO+e7d1r6X1me+mYn2Z1lK3UC2PuLvTK1DH4xNI0HY4LgKZL5m/p1WOPtGrM96vHvv3UA9wE1bllyeCDmbNt8vSkHT+TPIfCU36Mm+3KzXabm3Wv8Ke07g1nL1688MssGnoToY6maOTlmRARJhnjOo99DJ3K/9OjUwdujpHUMkfFmO5Vm/97kpWjzdrR5g86wjmnIegz2LQVxoeG6xGhVCxtXb148aRMcHR+HGaYYMZJyzyRM6OrG31yoszVo5muW1frLa6s4O39cBK1r08fBudOp/Uf7PRoUXM8tKqZM/Up1AxXXX1qU0z/pnq7df+u29/OtL4BjlpdPzngSnAQxUqssbrAAx0bqKvK3yjOskLT+srw+rJqgNQgma01s40sMBDms77K/IEfz7aaDUo/joa8wTtzXSQzQ80fuQQh2ztoZl7PCHKhclwuojhLq/x0hi6yxCv9IvIxWq2+Qfoz5fleplmRoNdnfYSeze1yFg3aJ2bgMgNiApcJiBm6zJAYcBkgZuQyI2JClwmJGbvMmJjIZSJi3rvMe2LuXOaOmNhl4rmWcZF4kcCIxfJ7+KAOO7ODy977iZDeMEu/kp6qhVGOD+rkcTbGSyrfqes7pbtmLpMRk7tMTswHl/lATOEyBTHCZQQx0mUkMROXmRBTukxJzNRlpsTcu8w9MQ8u80DMR5f5ODdlng0AzMxZfbyXVZDMTCgNRixs6nHLsYkS20LbjGcchwcEs9goA4JZYJRDgllUlEAwC4lyRDCLhzIkmAVDOSaYRUI5IZiFQfmeYBYD5R3BLADKmOCYwQnBCYPZQvMVzghmYi5zgpmSyw8EMxmXBcFMw6UgWPBNJVi2rwmXbkkw0205JZiJtrwnmCm2fCCYybX8SLDV6nYM6jO1/rRXtOgWjOhaz2Uwyms9mcHIr/VsBqPB1tMZjBBbz2cwamw9ocFIsvWMBqPL1lMauSfPaTAKbT2pwci09awGo9XmaW25xOUSzj15EoORbutZDEa/racxGBG3nsdglNx6IoORc+uZDEbTracyGGG3nstg1N16MoOReOvZDEbnraczGLG3ns9gFP/0CY2xUERBXaEk6xQf6xQ2yQbBGwzeJHiTwVsEbzF4m+BtBu8QvMPgXYJ3GbxH8B6D9wneZ/ABwQcMPiT4kMEdgjsMPiL4iMHHBB8z+ITgEwZ3Ce4y+JTgUwafEXzG4B7BPQafE3zO4AuCLxh8SfAlg68IvmLwNcHXDL4h+IbBtwTfPn28uqIDozqm0XWmXy09xm1wbtPlNjm35XJbnNt2uW3O7bjcDud2XW6Xc3sut8e5fZfb59yByx1w7tDlDjnXcbkO545c7ohzxy53zLkTlzvhXNflupw7dblTzp253Bnnei7X49y5y51z7sLlLjh36XKXnLtyuSvOXbvcNeduXO6Gc7cuZ2V/yUuI8iPozxH42XW17ltmKczs51mLJRMD9RNKGnVNrHC3Hi4rmCEDg1AdoqsQRKj60LUHIlRzlNVIqNLQdQYiVF/o6gIRqip0TYEI1RK6kkCEKghdPyBCdYOuGhChakHXCojEbB0MQpWBrgsQSdn6GYSqAF0DIEK5X2d+RCjj63yPCOV5neUREWzBDUI5vay2hW1KaRDK3zp7I0JZW+dsRChX60yNCGVonZ8RaatG3TK09ON8rPZb/60VWA4qcWhdWJA+atGTiYqK/WQwVD3MBRFZAqHC9V+CtSSVHC2ADhHB3wSJKExUV/2XYCvcSrT1RGYzPv6ZEqu1UKwBWSjUIZvUTAnUWijQEVkozpAsFOaYLBwuGysK8j1ZKMY7tjYzJcJ65jMlQGvhYrJVRPFlbElmSnTWQtF9IAsFV7CVmimh1Qs0UyKzFi40W2YUWEkWimtKFgrrniwU1QNZKKiP8+o7L8yz9wbXORZ1RrlVZ1ZEKKPqfIoI5VGdRRGh7KlzJyKUM3XGRIQypc6TiFB+1NkREcqKOiciQrlQZ0JEKAPq/IcI5T2d9RChbKdzHSKU43SGQ4Qym85riFA+09kMEcpiOochQrlLZy5EKGPpfIUI5SmdpRCh7KRzEyKUk3RGQoQykc5DiFD+0dkHEco6OucgQrlGZxpEbtkOUl4Y8LSQdMfVQdzHK7Z6NvQV06nCv55cFcOK65k41io6h1SoL4u3IIj9AlBU43V1AuEdTbEnRpF6VAppkA2jNERn/iRWiBjV18l8JtRT3h7IpxwMsnj4Q24G93MMwuaT2lTo7whN3qz86afU1dSkqS9TwdQvNyxG+pebFqMIkFsWoxiQ2xajKJA7FqM4kLsWo0iQexajWJD7FqNokAcWo3iQhxajiJAdi1FMyCOLUVTIY4tRXMgTi1FkyK7FKDbkqcUoOuSZxSg+ZM9iFCHy3GIUI/LCYhQl8tJiFCfyymIUKfLaYhQr8sZiFC3y1mKmIkMh7xZ+PjZsaD/nBs7HjXCDwaSLcJPBJI1wi8GkjnCbwSSQcIfBpJFwl8Ekk3CPwaSUcJ/BJJbwgMGkl/CQwSSZsMNgUk14xGASTnjMYNJOeMJgkk/YZTApKDxlMIkoPGMw6SjsMZikFJ4zmNQUXjCYBBVeMpg0FV4xmGQVXjOYlBXeMJjEFd4y2Fb8eLRVpZqon6IMmLjEBqGkLbFJKElLbBGqlfXc29LfZEwEeL4nQHp46xiG3vayN4DAV7gcR8KbZpN4iBBa4An9vQfWkpPCU2/3ZDE6Uu+7wH2OtaX+Mtd+pb5DdyR1il1CSZxij1DSptgnlKQpDgglZYpDQkmYokMo6VIcEUqyFMeEkirFCaEkStEllDQpTgklSYozQkmRokcoCVKcE0p6FBeEkhzFJaGkRnFFKIlRXBNKWhQ3hJIUxS2h9SOXFOs+0B8hfPOwpSoCgSqAjlv8q/JwnSyU6gZZKNFNslCaW2ThYbdNFopohywUzy5ZKJo9slAs+2ShSA7IQnEckoWi6JCFYjgiC0VwTBZu/glZuOldsnCzT8nCTT4jCze3RxZu6jlZuJkXZOEmXpKFm3dFFm7aNVm4WTdk4SbdsvtVlVZVZaktA75l0lRceKSo+NUv7GEQG3TZm0ZynE2kh+WON8WUlkPhFkRAFZFTDVW3l7UGdMNHhSDocgka9RLoggkaFRPokgkaNRPoogkaVRPosgkadRPowgkalRPo0gkatRPo4gka1RPo8gka9RPoAgoaFRToEgoaNRToIgoaVRToMgoadRToQgoalRToUgoatRToYgoa1RTocgoa9RToggoaFRXokgoaNRXoogoaVRXosgoadRXowgoalRXo0goatRXo4goa1RXo8goa9RXoAgtYhYWfFDDlyGIC3iQdQhE/qJeWhr70vRBSKDDbKDsSqPTBRKUeV7a5ajqf5e9m/SKZaUMnPuUVkjwqIkx5Tv/63cHBg053+jUQdRPMjw3f9g2RsS/xk7p7C6dll7fsztsGk2RDiD81Ed2gnomxHt2natT9VKNcRvEQqpZ9bdSjr3vgMSGzYOwL9W6tP5GZ/gQFhTPCxgusuWlTj7Hq8ngAQ3DaGbOlXYEEHjq2nTFRC4F+huY2jv089gOY12/UdCpg7j33qmt3ed3+2/M64203B9IR7KWdTpM9m/Pc3jg1k5ytcYOMi7l97uYSBYTz+klakwokzVFZ0SiCoulaZCOZ+PfU0gLNdpgsMv0Sk3nI9thLHk/U7D+qJwEue9iZ8zeYDjuPNvDSL2gEymj6l/jHL3Dvi4y17D3agM2sJFoZSqBXWTwq/EQ9kBpPswILVOE/CO9Z5+3LZ+rtHf1e+iQ1b6GKHPdf6LfHnvUhjlkb+0D0ubeBCRBDPlW/HjDeIVFvsakq2DhlrdUrpNkk1DlTF8WRhGXtXmTeMAPlbhrdRTkMI3+l8QpyViSxeng/n3Xers5byCwFxa21cXKq+71s43LF5C2M1kLnbT9KR/KhGTq5X6iHw3hs+CpYeoBnrfBD8KLUS7OqoJdwv+JtjjOhlidTBWAw9rbws28KXwlvkGV3K4vO45yTXJ3OWfFn1HgR6gHg3/6yuvpUQ3VOmoZ41e5SqxWb6d9PtDhHQZ2rN/xikH1/gHEWZ9NBAf7d4rsvltaa/yfi8cXly5W1VysvT79Z+u7b6v9LfL7wh4U/Lny9sLbwl4XvFvYWugsXC8FCuPD9wt8W/r72/do/1v659i/T9EefVX1+v+D8rP37fxzMXXU= T ransform Par t C a ps u le Decoder . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . v j q AAAyD3iclVvbctvIEdXmulFuu8ljXlCRXbtJySrJ3qrs4+p+oyRK1N20XSDYBGHhZswQlMxi/mFfkw/JWyqv+YT8Rr4gPTMYdA8EeSuqsoQ+Z6Yxl9PTTRAe5HEk5Orqfz770Y9/8tOf/fzzXyz+8le//s1vv/jyd5cimxQBXARZnBXXA19AHKVwISMZw3VegJ8MYrga3G0q/qqEQkRZei4fcniT+GEajaLAlwhd9cvy3Ye37999sbS6sqp/vMcXa9XF0kL103335ep/+8MsmCSQyiD2hXi9tprLNzO/kFEQw3yxPxGQ+8GdH8JrvEz9BMSbmR7v3HuOyNAbZQX+S6WnUd5j5idCPCQDbJn4ciyanALbuNcTOfr2zSxK84mENDA3Gk1iT2aemrw3jAoIZPyAF35QRDhWLxj7hR9IXCLnLoPEmcNMRjiB+eLic/XjHW9feUfr53ve1vbO/vH++f7Jcc/T1GLbWJfxr5qpWFZuF597R35x5wkcCu6B8LKRF/i5uVaLUsAIiiJKQzXuYVRGwjYbReGkABxpCtMgSxI/Hc76CMYwkvPZrA+J93UHr/80nz9qE+BWQWFbbWqrrV0RhePa2Zky2lrJLLdtzrO8rcUgkzJLbKMNbT1qV83bt838p1oMbIvBUy0C2yJ4qsXQthiqFrgNezi7WM3Q8z1sr3QBIwykoYdrk7g+8FqB89drb9DLYOQtrSkn6GVHb4rZNVQdLHtxNoXiRYBhubLYR5d6WWG0tDYzG/jXPloz7aCtOw43kn684u2gGITEmFJ7L9SOIW887liPO02PmpbTzN5z6WV1V+HZRh7OqDJe2h4fJv6Quiy9WvrmUbfluo+9esVdfaOn0zOq/uRyoPLN4KsQcNajxYFdENO7Z3v3Wnqf2V465qdZHWUr9cKYuwu9MnUMPrE0TYfjAqDpkvlbevXYI60a8/3qsW8/9QA3QXVuWTL4YOZsmzw9acfPJM+h8JQf42a7crPd5mbdK/wprXvD2YsXL/wyi4beRKijKRp5eSZEhInGuM5jH0On8v/06NSBm2MktcxRMaZ71eb/nmTlaLN2tPmDjnDOaQj6DDZthfGh4XpEKBVLW1cvXjwpExydH4cZJphx0jJP5Mzo6kafnChz9Wim69bVeosrK3h7P5xE7evTh8G502n9Bzs9WtQcD61q5kx9CjXDVVef2hTTv6nebt2/6/a3M61vgKNW108OuBIcRLESa6wu8EDHBuqq8jeKs6zQtL4yvL6sGiA1SGZrzWwjCwyE+ayvMn/gx7OtZoPSj6Mhb/DOXBfJzFDzRy5ByPYOmpnXM4JcqByXiyjO0io/naGLLPFKv4h8jFarb5D+THm+l2lWJOj1WR+hZ3O7nEWD9okZuMyAmMBlAmKGLjMkBlwGiBm5zIiY0GVCYsYuMyYmcpmImPcu856YO5e5IyZ2mXiuZVwkXiQwYrEEHz6ow87s4LL3fiKkN8zSr6SnamGU44M6eZyN8ZLKd+r6TumumctkxOQukxPzwWU+EFO4TEGMcBlBjHQZSczEZSbElC5TEjN1mSkx9y5zT8yDyzwQ89FlPs5NmWcDADNzVh/vZRUkMxNKgxELm3rccmyixLbQNuMZx+EBwSw2yoBgFhjlkGAWFSUQzEKiHBHM4qEMCWbBUI4JZpFQTghmYVC+J5jFQHlHMAuAMiY4ZnBCcMJgttB8hTOCmZjLnGCm5PIDwUzGZUEw03ApCBZ8UwmW7WvCpVsSzHRbTglmoi3vCWaKLR8IZnItPxJstbodg/pMrT/tFS26BSO61nMZjPJaT2Yw8ms9m8FosPV0BiPE1vMZjBpbT2gwkmw9o8HosvWURu7JcxqMQltPajAybT2rwWi1eVpbLnG5hHNPnsRgpNt6FoPRb+tpDEbErecxGCW3nshg5Nx6JoPRdOupDEbYrecyGHW3nsxgJN56NoPReevpDEbsreczGMU/fUJjLBRRUFcoyTrFxzqFTbJB8AaDNwneZPAWwVsM3iZ4m8E7BO8weJfgXQbvEbzH4H2C9xl8QPABgw8JPmRwh+AOg48IPmLwMcHHDD4h+ITBXYK7DD4l+JTBZwSfMbhHcI/B5wSfM/iC4AsGXxJ8yeArgq8YfE3wNYNvCL5h8C3Bt08fr67owKiOaXSd6VdLj3EbnNt0uU3ObbncFue2XW6bczsut8O5XZfb5dyey+1xbt/l9jl34HIHnDt0uUPOdVyuw7kjlzvi3LHLHXPuxOVOONd1uS7nTl3ulHNnLnfGuZ7L9Th37nLnnLtwuQvOXbrcJeeuXO6Kc9cud825G5e74dyty1nZX/ISovwI+nMEfnZdrfuWWQoz+3nWYsnEQP2EkkZdEyvcrYfLCmbIwCBUh+gqBBGqPnTtgQjVHGU1Eqo0dJ2BCNUXurpAhKoKXVMgQrWEriQQoQpC1w+IUN2gqwZEqFrQtQIiMVsHg1BloOsCRFK2fgahKkDXAIhQ7teZHxHK+DrfI0J5Xmd5RARbcINQTi+rbWGbUhqE8rfO3ohQ1tY5GxHK1TpTI0IZWudnRNqqUbcMLf04H6v91n9rBZaDShxaFxakj1r0ZKKiYj8ZDFUPc0FElkCocP2XYC1JJUcLoENE8DdBIgoT1VX/JdgKtxJtPZHZjI9/psRqLRRrQBYKdcgmNVMCtRYKdEQWijMkC4U5JguHy8aKgnxPForxjq3NTImwnvlMCdBauJhsFVF8GVuSmRKdtVB0H8hCwRVspWZKaPUCzZTIrIULzZYZBVaSheKakoXCuicLRfVAFgrq47z6zgvz7L3BdY5FnVFu1ZkVEcqoOp8iQnlUZ1FEKHvq3IkI5UydMRGhTKnzJCKUH3V2RISyos6JiFAu1JkQEcqAOv8hQnlPZz1EKNvpXIcI5Tid4RChzKbzGiKUz3Q2Q4SymM5hiFDu0pkLEcpYOl8hQnlKZylEKDvp3IQI5SSdkRChTKTzECKUf3T2QYSyjs45iFCu0ZkGkVu2g5QXBjwtJN1xdRD38Yqtng19xXSq8K8nV8Ww4nomjrWKziEV6sviLQhivwAU1XhdnUB4R1PsiVGkHpVCGmTDKA3RmT+JFSJG9XUynwn1lLcH8ikHgywe/pCbwf0cg7D5pDYV+jtCkzcrf/opdTU1aerLVDD1yw2Lkf7lpsUoAuSWxSgG5LbFKArkjsUoDuSuxSgS5J7FKBbkvsUoGuSBxSge5KHFKCJkx2IUE/LIYhQV8thiFBfyxGIUGbJrMYoNeWoxig55ZjGKD9mzGEWIPLcYxYi8sBhFiby0GMWJvLIYRYq8thjFiryxGEWLvLWYqchQyLuFn48NG9rPuYHzcSPcYDDpItxkMEkj3GIwqSPcZjAJJNxhMGkk3GUwySTcYzApJdxnMIklPGAw6SU8ZDBJJuwwmFQTHjGYhBMeM5i0E54wmOQTdhlMCgpPGUwiCs8YTDoKewwmKYXnDCY1hRcMJkGFlwwmTYVXDCZZhdcMJmWFNwwmcYW3DLYVPx5tVakm6qcoAyYusUEoaUtsEkrSEluEamU997b0NxkTAZ7vCZAe3jqGobe97A0g8BUux5HwptkkHiKEFnhCf++BteSk8NTbPVmMjtT7LnCfY22pv8y1X6nv0B1JnWKXUBKn2COUtCn2CSVpigNCSZnikFASpugQSroUR4SSLMUxoaRKcUIoiVJ0CSVNilNCSZLijFBSpOgRSoIU54SSHsUFoSRHcUkoqVFcEUpiFNeEkhbFDaEkRXFLaP3IJcW6D/RHCN88bKmKQKAKoOMW/6o8XCcLpbpBFkp0kyyU5hZZeNhtk4Ui2iELxbNLFopmjywUyz5ZKJIDslAch2ShKDpkoRiOyEIRHJOFm39CFm56lyzc7FOycJPPyMLN7ZGFm3pOFm7mBVm4iZdk4eZdkYWbdk0WbtYNWbhJt+x+VaVVVVlqy4BvmTQVFx4pKn71C3sYxAZd9qaRHGcT6WG5400xpeVQuAURUEXkVEPV7WWtAd3wUSEIulyCRr0EumCCRsUEumSCRs0EumiCRtUEumyCRt0EunCCRuUEunSCRu0EuniCRvUEunyCRv0EuoCCRgUFuoSCRg0FuoiCRhUFuoyCRh0FupCCRiUFupSCRi0FupiCRjUFupyCRj0FuqCCRkUFuqSCRk0FuqiCRlUFuqyCRl0FurCCRmUFurSCRm0FuriCRnUFuryCRn0FusACVmHhJwVMObKYgDdJh1DED+qlpaEvfS+EFArMNsqOBCp9MFGpx5VtrprOZ/m7Wb9IZtrQiU95hSSPighTntO/fndw8KDTnX4NRN0E82PDt31DZOxL/KTu3sJp2eUtu/O2wSTZEOJPTUQ3qGdirEf3qRp1P9Uol1E8hKplXxv16OseeEzILBj7Qr1b609kpj9BQeGMsPECa27a1GOsujwewBCcdsZsaVcggYeObWdM1EKgn6G5jWM/j/0A5vUbNZ0KmHvPveraXV63//a8znjbzYF0BHtpp9Nkz+Y8tzdOzSRna9wg42Jun7u5RAHhvH6S1qQCSXNUVjSKoGi6FtlIJv49tbRAsx0mi0y/xGQesj32kscTNfuP6kmAyx525vwNpsPOow289AsagTKa/iX+8Qvc+yJjLXuPNmAzK4lWhhLoVRaPCj9RD6TG06zAAlX4D8J71nn78pl6e0e/lz5JzVuoIsf9F/rtsWd9iGPWxj4Qfe5tYALEkE/VrweMd0jUW2yqCjZOWWv1Cmk2CXXO1EVxJGFZuxeZN8xAuZtGd1EOw8hfabyCnBVJrB7ez2edt6vzFjJLQXFrbZyc6n4v27hcMXkLo7XQeduP0pF8aIZO7hfq4TAeG74Klh7gWSv8ELwo9dKsKugl3K94m+NMqOXJVAEYjL0t/OybwlfCG2TZ3cqi8zjnJFenc1b8GTVehHoA+Le/rK4+1VCdk6YhXrW71GrFZvr3Ey3OUVDn6g2/GGTfH2Ccxdl0UIB/t/jui6W15v+JeHxx+XJl7dXKy9Nvlr77tvr/Ep8v/GHhjwtfL6wt/GXhu4W9he7CxUKwcLfw/cLfFv6+9v3aP9b+ufYv0/RHn1V9fr/g/Kz9+38s2l9c v j q AAAyD3iclVvbctvIEdXmulFuu8ljXlCRXbtJySrJ3qrs4+p+oyRK1N20XSDYBGHhZswQlMxi/mFfkw/JWyqv+YT8Rr4gPTMYdA8EeSuqsoQ+Z6Yxl9PTTRAe5HEk5Orqfz770Y9/8tOf/fzzXyz+8le//s1vv/jyd5cimxQBXARZnBXXA19AHKVwISMZw3VegJ8MYrga3G0q/qqEQkRZei4fcniT+GEajaLAlwhd9cvy3Ye37999sbS6sqp/vMcXa9XF0kL103335ep/+8MsmCSQyiD2hXi9tprLNzO/kFEQw3yxPxGQ+8GdH8JrvEz9BMSbmR7v3HuOyNAbZQX+S6WnUd5j5idCPCQDbJn4ciyanALbuNcTOfr2zSxK84mENDA3Gk1iT2aemrw3jAoIZPyAF35QRDhWLxj7hR9IXCLnLoPEmcNMRjiB+eLic/XjHW9feUfr53ve1vbO/vH++f7Jcc/T1GLbWJfxr5qpWFZuF597R35x5wkcCu6B8LKRF/i5uVaLUsAIiiJKQzXuYVRGwjYbReGkABxpCtMgSxI/Hc76CMYwkvPZrA+J93UHr/80nz9qE+BWQWFbbWqrrV0RhePa2Zky2lrJLLdtzrO8rcUgkzJLbKMNbT1qV83bt838p1oMbIvBUy0C2yJ4qsXQthiqFrgNezi7WM3Q8z1sr3QBIwykoYdrk7g+8FqB89drb9DLYOQtrSkn6GVHb4rZNVQdLHtxNoXiRYBhubLYR5d6WWG0tDYzG/jXPloz7aCtOw43kn684u2gGITEmFJ7L9SOIW887liPO02PmpbTzN5z6WV1V+HZRh7OqDJe2h4fJv6Quiy9WvrmUbfluo+9esVdfaOn0zOq/uRyoPLN4KsQcNajxYFdENO7Z3v3Wnqf2V465qdZHWUr9cKYuwu9MnUMPrE0TYfjAqDpkvlbevXYI60a8/3qsW8/9QA3QXVuWTL4YOZsmzw9acfPJM+h8JQf42a7crPd5mbdK/wprXvD2YsXL/wyi4beRKijKRp5eSZEhInGuM5jH0On8v/06NSBm2MktcxRMaZ71eb/nmTlaLN2tPmDjnDOaQj6DDZthfGh4XpEKBVLW1cvXjwpExydH4cZJphx0jJP5Mzo6kafnChz9Wim69bVeosrK3h7P5xE7evTh8G502n9Bzs9WtQcD61q5kx9CjXDVVef2hTTv6nebt2/6/a3M61vgKNW108OuBIcRLESa6wu8EDHBuqq8jeKs6zQtL4yvL6sGiA1SGZrzWwjCwyE+ayvMn/gx7OtZoPSj6Mhb/DOXBfJzFDzRy5ByPYOmpnXM4JcqByXiyjO0io/naGLLPFKv4h8jFarb5D+THm+l2lWJOj1WR+hZ3O7nEWD9okZuMyAmMBlAmKGLjMkBlwGiBm5zIiY0GVCYsYuMyYmcpmImPcu856YO5e5IyZ2mXiuZVwkXiQwYrEEHz6ow87s4LL3fiKkN8zSr6SnamGU44M6eZyN8ZLKd+r6TumumctkxOQukxPzwWU+EFO4TEGMcBlBjHQZSczEZSbElC5TEjN1mSkx9y5zT8yDyzwQ89FlPs5NmWcDADNzVh/vZRUkMxNKgxELm3rccmyixLbQNuMZx+EBwSw2yoBgFhjlkGAWFSUQzEKiHBHM4qEMCWbBUI4JZpFQTghmYVC+J5jFQHlHMAuAMiY4ZnBCcMJgttB8hTOCmZjLnGCm5PIDwUzGZUEw03ApCBZ8UwmW7WvCpVsSzHRbTglmoi3vCWaKLR8IZnItPxJstbodg/pMrT/tFS26BSO61nMZjPJaT2Yw8ms9m8FosPV0BiPE1vMZjBpbT2gwkmw9o8HosvWURu7JcxqMQltPajAybT2rwWi1eVpbLnG5hHNPnsRgpNt6FoPRb+tpDEbErecxGCW3nshg5Nx6JoPRdOupDEbYrecyGHW3nsxgJN56NoPReevpDEbsreczGMU/fUJjLBRRUFcoyTrFxzqFTbJB8AaDNwneZPAWwVsM3iZ4m8E7BO8weJfgXQbvEbzH4H2C9xl8QPABgw8JPmRwh+AOg48IPmLwMcHHDD4h+ITBXYK7DD4l+JTBZwSfMbhHcI/B5wSfM/iC4AsGXxJ8yeArgq8YfE3wNYNvCL5h8C3Bt08fr67owKiOaXSd6VdLj3EbnNt0uU3ObbncFue2XW6bczsut8O5XZfb5dyey+1xbt/l9jl34HIHnDt0uUPOdVyuw7kjlzvi3LHLHXPuxOVOONd1uS7nTl3ulHNnLnfGuZ7L9Th37nLnnLtwuQvOXbrcJeeuXO6Kc9cud825G5e74dyty1nZX/ISovwI+nMEfnZdrfuWWQoz+3nWYsnEQP2EkkZdEyvcrYfLCmbIwCBUh+gqBBGqPnTtgQjVHGU1Eqo0dJ2BCNUXurpAhKoKXVMgQrWEriQQoQpC1w+IUN2gqwZEqFrQtQIiMVsHg1BloOsCRFK2fgahKkDXAIhQ7teZHxHK+DrfI0J5Xmd5RARbcINQTi+rbWGbUhqE8rfO3ohQ1tY5GxHK1TpTI0IZWudnRNqqUbcMLf04H6v91n9rBZaDShxaFxakj1r0ZKKiYj8ZDFUPc0FElkCocP2XYC1JJUcLoENE8DdBIgoT1VX/JdgKtxJtPZHZjI9/psRqLRRrQBYKdcgmNVMCtRYKdEQWijMkC4U5JguHy8aKgnxPForxjq3NTImwnvlMCdBauJhsFVF8GVuSmRKdtVB0H8hCwRVspWZKaPUCzZTIrIULzZYZBVaSheKakoXCuicLRfVAFgrq47z6zgvz7L3BdY5FnVFu1ZkVEcqoOp8iQnlUZ1FEKHvq3IkI5UydMRGhTKnzJCKUH3V2RISyos6JiFAu1JkQEcqAOv8hQnlPZz1EKNvpXIcI5Tid4RChzKbzGiKUz3Q2Q4SymM5hiFDu0pkLEcpYOl8hQnlKZylEKDvp3IQI5SSdkRChTKTzECKUf3T2QYSyjs45iFCu0ZkGkVu2g5QXBjwtJN1xdRD38Yqtng19xXSq8K8nV8Ww4nomjrWKziEV6sviLQhivwAU1XhdnUB4R1PsiVGkHpVCGmTDKA3RmT+JFSJG9XUynwn1lLcH8ikHgywe/pCbwf0cg7D5pDYV+jtCkzcrf/opdTU1aerLVDD1yw2Lkf7lpsUoAuSWxSgG5LbFKArkjsUoDuSuxSgS5J7FKBbkvsUoGuSBxSge5KHFKCJkx2IUE/LIYhQV8thiFBfyxGIUGbJrMYoNeWoxig55ZjGKD9mzGEWIPLcYxYi8sBhFiby0GMWJvLIYRYq8thjFiryxGEWLvLWYqchQyLuFn48NG9rPuYHzcSPcYDDpItxkMEkj3GIwqSPcZjAJJNxhMGkk3GUwySTcYzApJdxnMIklPGAw6SU8ZDBJJuwwmFQTHjGYhBMeM5i0E54wmOQTdhlMCgpPGUwiCs8YTDoKewwmKYXnDCY1hRcMJkGFlwwmTYVXDCZZhdcMJmWFNwwmcYW3DLYVPx5tVakm6qcoAyYusUEoaUtsEkrSEluEamU997b0NxkTAZ7vCZAe3jqGobe97A0g8BUux5HwptkkHiKEFnhCf++BteSk8NTbPVmMjtT7LnCfY22pv8y1X6nv0B1JnWKXUBKn2COUtCn2CSVpigNCSZnikFASpugQSroUR4SSLMUxoaRKcUIoiVJ0CSVNilNCSZLijFBSpOgRSoIU54SSHsUFoSRHcUkoqVFcEUpiFNeEkhbFDaEkRXFLaP3IJcW6D/RHCN88bKmKQKAKoOMW/6o8XCcLpbpBFkp0kyyU5hZZeNhtk4Ui2iELxbNLFopmjywUyz5ZKJIDslAch2ShKDpkoRiOyEIRHJOFm39CFm56lyzc7FOycJPPyMLN7ZGFm3pOFm7mBVm4iZdk4eZdkYWbdk0WbtYNWbhJt+x+VaVVVVlqy4BvmTQVFx4pKn71C3sYxAZd9qaRHGcT6WG5400xpeVQuAURUEXkVEPV7WWtAd3wUSEIulyCRr0EumCCRsUEumSCRs0EumiCRtUEumyCRt0EunCCRuUEunSCRu0EuniCRvUEunyCRv0EuoCCRgUFuoSCRg0FuoiCRhUFuoyCRh0FupCCRiUFupSCRi0FupiCRjUFupyCRj0FuqCCRkUFuqSCRk0FuqiCRlUFuqyCRl0FurCCRmUFurSCRm0FuriCRnUFuryCRn0FusACVmHhJwVMObKYgDdJh1DED+qlpaEvfS+EFArMNsqOBCp9MFGpx5VtrprOZ/m7Wb9IZtrQiU95hSSPighTntO/fndw8KDTnX4NRN0E82PDt31DZOxL/KTu3sJp2eUtu/O2wSTZEOJPTUQ3qGdirEf3qRp1P9Uol1E8hKplXxv16OseeEzILBj7Qr1b609kpj9BQeGMsPECa27a1GOsujwewBCcdsZsaVcggYeObWdM1EKgn6G5jWM/j/0A5vUbNZ0KmHvPveraXV63//a8znjbzYF0BHtpp9Nkz+Y8tzdOzSRna9wg42Jun7u5RAHhvH6S1qQCSXNUVjSKoGi6FtlIJv49tbRAsx0mi0y/xGQesj32kscTNfuP6kmAyx525vwNpsPOow289AsagTKa/iX+8Qvc+yJjLXuPNmAzK4lWhhLoVRaPCj9RD6TG06zAAlX4D8J71nn78pl6e0e/lz5JzVuoIsf9F/rtsWd9iGPWxj4Qfe5tYALEkE/VrweMd0jUW2yqCjZOWWv1Cmk2CXXO1EVxJGFZuxeZN8xAuZtGd1EOw8hfabyCnBVJrB7ez2edt6vzFjJLQXFrbZyc6n4v27hcMXkLo7XQeduP0pF8aIZO7hfq4TAeG74Klh7gWSv8ELwo9dKsKugl3K94m+NMqOXJVAEYjL0t/OybwlfCG2TZ3cqi8zjnJFenc1b8GTVehHoA+Le/rK4+1VCdk6YhXrW71GrFZvr3Ey3OUVDn6g2/GGTfH2Ccxdl0UIB/t/jui6W15v+JeHxx+XJl7dXKy9Nvlr77tvr/Ep8v/GHhjwtfL6wt/GXhu4W9he7CxUKwcLfw/cLfFv6+9v3aP9b+ufYv0/RHn1V9fr/g/Kz9+38s2l9c per tu rb Multi- V ie w Ag r e e m e n t … … v j f AAAyKniclVvbctzGEaVzdZg4sZPHvKBCqeykKJZWclX8aN5JcUku7xetpMJie7EQcRNmFktqa/MPeU1+IV+TN1de8yHpmcGge7CgXGGVRcw5gwZm5vT0AQgP8jgS8vnzHz77yU9/9vNf/PLzXy3/+jdf/PZ3X371+0uRTYoALoIszorrgS8gjlK4kJGM4TovwE8GMVwN7jYVf1VCIaIsPZcPObxJ/DCNRlHgS4Su+mX5bvT2/bsvV56vPdc/3uJBpzpYWap+eu++6nzRH2bBJIFUBrEvxOvO81y+mfmFjIIY5sv9iYDcD+78EF7jYeonIN7M9P3OvaeIDL1RVuB/qfQ0ys+Y+YkQD8kAeya+HIsmp8A27vVEjr57M4vSfCIhDcyFRpPYk5mnBu8NowICGT/ggR8UEd6rF4z9wg8kTpFzlUHijGEmIxzAfHn5qfrxjravvMP18z1va3tn/2j/fP/46MzT1HLbva7ibzVSsarCLj/1Dv3izhN4K7gGwstGXuDn5lhNSgEjKIooDdV9D6MyErbbKAonBeCdpjANsiTx0+Gsj2AMIzmfzfqQeN908fjP8/lCnwCXCgrba1O32voVUTiug52qRlsvmeW2z3mWt/UYZFJmie20oVsL/apx+7ab/1iPge0xeKxHYHsEj/UY2h5D1QOXYQ9HF6sRer6H/ZUuYISJNPRwbhI3Bh4rcP668wajDEbeSkcFwSg7elHMqqHqYNWLsykUzwJMy7XlPobU0wqjlc7MLODf+tia6QBtp+PtRtKP17wdFIOQmFNq7YVaMeRNxB0bcacZUdNymtlrrryorio828nDEVWNF/aMDxN/SKesvFz5duG01foce/SSh/pWD+fMqPqT04HKNzdfpYAzHy0B7ISYs8/s2WctZ5/as3TOT7M6y9bqiTFXF3pm6hx8ZGqaAccFQDMki7fycjEizRqL/XIxtp96gIugTm6ZMvhgxmy7PD5oJ84kz6HwVBwTZrsKs90WZt0r/CnNeyPYs2fP/DKLht5EqK0pGnl5JkSEhcaEzmMfU6eK//jdqQ03x0xqGaNizOlVn/97kFWgzTrQ5o8GwjGnIeg92PQVJoaG6ztCqVjahnr27FGZ4N35cZhhgRknLeNEztxd3emTA2WhFka6bkOtt4SygrfXw0HUsT69GZw7J63/6EkLk5rjplWNnKlPoeZ21dGnFsWc31Rvrz6/555vR1pfAO9aHT96w5XgIIqVWGN1gBs6dlBHVbxRnGWFpvWR4fVh1QGpQTLrNKuNLDAR5rO+qvyBH8+2mh1KP46GvMM7c1wkM0PNF0KCkO0naGZejwhyoWpcLqI4S6v6dIohssQr/SLyMVutvkH6MxX5XqZZkWDUJ32EnsztdBYN2idm4DIDYgKXCYgZusyQGHAZIGbkMiNiQpcJiRm7zJiYyGUiYt67zHti7lzmjpjYZeK5lnGReJHAjEULPnxQm51ZwVXv/URIb5ilX0tPeWGU44PaeZyF8ZIqdurGTumqmctkxOQukxPzwWU+EFO4TEGMcBlBjHQZSczEZSbElC5TEjN1mSkx9y5zT8yDyzwQ89FlPs6NzbMJgJU5q7f3skqSmUmlwYilTX3fcmyyxPbQbcYzjsMDgllulAHBLDHKIcEsK0ogmKVEOSKY5UMZEsySoRwTzDKhnBDM0qB8TzDLgfKOYJYAZUxwzOCE4ITBbKL5DGcEMzGXOcFMyeUHgpmMy4JgpuFSECz4ohIs2+eES7ckmOm2nBLMRFveE8wUWz4QzORafiTYanU7BvVMrZ/2ihbdghFd674MRnmtOzMY+bXuzWA02Lo7gxFi6/4MRo2tOzQYSbbu0WB02bpLI/foPg1Goa07NRiZtu7VYLTa3K0tl7hcwrlHd2Iw0m3di8Hot3U3BiPi1v0YjJJbd2Qwcm7dk8FounVXBiPs1n0ZjLpbd2YwEm/dm8HovHV3BiP21v0ZjOIf36ExF4ooqB1Ksk75sU5pk2wQvMHgTYI3GbxF8BaDtwneZvAOwTsM3iV4l8F7BO8xeJ/gfQa/IvgVgw8IPmBwl+Augw8JPmTwEcFHDD4m+JjBPYJ7DD4h+ITBpwSfMviM4DMGnxN8zuALgi8YfEnwJYOvCL5i8DXB1wy+IfiGwbcE3z6+vbqiA6M6ptF1pl8tPcZtcG7T5TY5t+VyW5zbdrltzu243A7ndl1ul3N7LrfHuX2X2+fcK5d7xbkDlzvgXNflupw7dLlDzh253BHnjl3umHM9l+tx7sTlTjh36nKnnDtzuTPOnbvcOecuXO6Cc5cud8m5K5e74ty1y11z7sblbjh363JW9pfcQpQfQT9H4LPr8/rcMkthZp9nLZZMDNRPqGiUIgoTv8L1MVHWLivKtcplBTNkYBCyKNqgIELGRNsSRMiOlNVNkgnRFgQRsh7aeCBChkPbDUTIZmiTgQiZC20tECFLoQ0FImQktI1AJGZTZBAyDdoyIJKyqTUIGQRtDxAhW6BNASJkBrQVQKRgM28QwSbcIFTuy2rF2HqVBqHSrgs7IlTQdTlHhMq4LuKIUPHWpRuRNqPqOtTSj/OxWm/9uxZnOajEoXVhQXoKo5cWFRX7yWCozjAHRGQJhArXvwnWalVKtQAGRAT/JciKtxKuha1wK9HWA5nN+P3PlFhtC8UaUAuFOmSDmimB2hYKdEQtFGdILRTmmFp4u+xeUZDvqYVivGNzM1MirEc+UwK0LZxMNosovoxNyUyJzrZQdB+ohYIr2EzNlNDqCZopkdkWTjSbZhRYSS0U15RaKKx7aqGoHqiFgvo4r/4chiX43uC6/KLOqOzqoosIFVtdahGhEqsLLCJUWHVZRYTKqS6miFAR1SUUESqdunAiQgVTl0tEqEzqIokIFUddGhGhkqgLIiJUCHUZRITKny5+iFDR0yUPESp1utAhQgVOlzdEqKzpooYIFTNdyhChEqYLGCJUuHTZQoTKlS5WiFCR0iUKESpNujAhQgVJlyNEqAzpIoTILVtBqgsDXhaS3rjaiPt4xGbPpr5iulX614NjBejMFiBU0TmkQv0deQuC2C8ARTVeVzsQXtH4QDGK1FtUSINsGKUhBvMnsULEqD5O5jOhXgCfgXwswCCLhz8WZnA/xyRsvsRNhf7zoSmpVTz9ArsamjTWMxVM/XLDYqR/uWkxygC5ZTHKAbltMcoCuWMxygO5azHKBLlnMcoFuW8xygb5ymKUD/LAYpQRsmsxygl5aDHKCnlkMcoLeWwxygzZsxjlhjyxGGWHPLUY5Yc8sxhliDy3GOWIvLAYZYm8tBjlibyyGGWKvLYY5Yq8sRhli7y1mDFrKOTdws/Hhg3tI3DgPImEGwwmXYSbDCZphFsMJnWE2wwmgYQ7DCaNhLsMJpmEewwmpYT7DCaxhK8YTHoJDxhMkgm7DCbVhIcMJuGERwwm7YTHDCb5hD0Gk4LCEwaTiMJTBpOOwjMGk5TCcwaTmsILBpOgwksGk6bCKwaTrMJrBpOywhsGk7jCWwbbhwHc2iqrJuoXLAMmLrFBKGlLbBJK0hJbhGplPfW29B85JgI83xMgPbx0DENve9UbQOArXI4j4U2zSTxECFvgCf0nEfSSk8JTH/5kMQZSn8LAfY7eUv+d1/61fYeuSOoUu4SSOMUeoaRNsU8oSVO8IpSUKQ4IJWGKLqGkS3FIKMlSHBFKqhTHhJIoRY9Q0qQ4IZQkKU4JJUWKM0JJkOKcUNKjuCCU5CguCSU1iitCSYzimlDSorghlKQobgmt38ak6PtAP0L45j1MZQKBHEDXNf/KHq5TC6W6QS2U6Ca1UJpb1MLNbptaKKIdaqF4dqmFotmjFopln1ooklfUQnEcUAtF0aUWiuGQWiiCI2rh4h9TCxe9Ry1c7BNq4SKfUgsX94xauKjn1MLFvKAWLuIltXDxrqiFi3ZNLVysG2rhIt2y61VOq3JZasmAL5k0jgu3FJW/+ls+TGKDrnrTSI6zifTQ7nhTLGk5FK4hAnJEjhuqLi9rDeiOC0YQtF2Chl8CbZig4ZhAWyZoeCbQpgkargm0bYKGbwJtnKDhnEBbJ2h4J9DmCRruCbR9goZ/Am2goOGgQFsoaHgo0CYKGi4KtI2Cho8CbaSg4aRAWyloeCnQZgoabgq0nYKGnwJtqKDhqEBbKmh4KtCmChquCrStgoavAm2soOGsQFsraHgr0OYKGu4KtL2Chr8CbbCAOSx8UsCSI4sJeJN0CEX8oL5nGvrS90JIocBqo9qRQKUPJqr0uLLNVdf5LH836xfJTDd04VNRIcmjIsKS55xff1Y4eNDlTn8hoi6C9bER2348MvYlPqm7l3B69njP3rztZpJsCPGnBqI71CMxrYXrVJ16n+qUyygeQtWzrxv13ddn4DYhs2DsC/XZrT+RmX6CgsK5w8a3rbnpU99jdcriDQzB6WeaLf0KJHDTsf1ME7UQ6HdobufYz2M/gHn9sU23AubeU686dqfXPX97Xle87eaNdAX7nqfbZE/nvLY3ds0kZ3PcIONibt+7uUQB4bx+k9akAkljVK1oFEHRDC2ykUz8e+ppgWY/LBaZ/r7JvGRbjJLHEzX6j+pNgMsedOf846aD7sICXvoF3YFqNONL/OUXuPZFxnqeLSzAZlYSrRpKoFdZPCr8RL2QGk+zAg2q8B+E96T79sUT9WGP/mR9kpoPVEWO6y/0h2VP+hDHrI99IfrU28ACiCmfqn8eMN8hUR+4KRdsgrLe6uvSbBLqmqlNcSRhVYcXmTfMQIWbRndRDsPIX2t8nZwVSaze689n3bfP5y1kloLiOm2cnOrzXrRxuWLyFkZrofu2H6Uj+dBMndwv1Mth3DZ8lSxngHut8EPwotRLs8rQS7hf8zbHmVDTkykDGIy9LXz2TeFr4Q2y7G5t2Xmdc5yr3Tkr/oIaL0J9A/i7v6qOPtVR7ZOmIx61h9RqxW7630d6nKOgztXHfzHIvj/APIuz6aAA/2753Zcrneb/LrF4cPlirfNy7cXJtyvff1f9rxSfL/1x6U9L3yx1lv669P3S3lJv6WIpWLpb+vvSP5b+2flX59+dHzr/MV1/8ll1zh+WnJ/Of/8HPllp7A== S AAAyCXiclVtbc9zKcaadOHGYODlOHvOCCqWy46JYonQqcd7MOykur8ubdKhzCovtxULETZhZkNTW5g/41f4heUvlNb8if8O/ID09GHQPCOqUWSUR/X0zjbl8Pd2LBUdlmij9+vX//eSnf/GXP/urv/753yz/7d/94u//4Ztf/uOVKmZVBJdRkRbVzShUkCY5XOpEp3BTVhBmoxSuR3dbhr+uoVJJkV/oxxI+ZmGcJ5MkCjVCZ8Mfvll5vfaafoKnF+vNxcpS83P6wy9f/+l2XESzDHIdpaFS362/LvXHeVjpJEphsXw7U1CG0V0Yw3d4mYcZqI9zGukieInIOJgUFf7LdUCo7DEPM6UesxG2zEI9VV3OgH3cdzM9+e3HeZKXMw15ZG80maWBLgIz7WCcVBDp9BEvwqhKcKxBNA2rMNK4ON5dRpk3h7lOcAKL5eWX5ic43rkOjjYu9oPtnd2D44OLg5PjYUDUct9YV/G3malaNW6XXwZHYXUXKBwKrr4KikkQhaW9NotSwQSqKsljM+5xUifKNZsk8awCHGkO91GRZWE+nt8imMJEL+bzW8iCXw/w+l8XiydtItwqqFyrLbL62lVJPG2dnRujr5UuStfmoij7WowKrYvMNdok60m7Zt6haxY+12LkWoyeaxG5FtFzLcauxdi0wG3Yx9mlZoZBGGB7owuYYAiNA1ybzPeB1wZcfLf+Eb2MJsHKunGCXnZpU+yuoepgNUiLe6heRRiQa8u36JKWFSYr63O7gf95i9acHPR1x+EmOkzXgl0Ug9IYU2bvldkx5K3HXedxt+uRaH1fuHuuvGnuqgLXKMAZNcYb1+PzLBxzl5W3K98+6bba9nFXb6Wrb2k6Q6vqry4HKt8OvgkBbz16HLgFsb2Hrvewp/e560Uxf1+0UbbWLoy9u6KVaWPwmaXpOpxWAF2Xwt/K26ceedWE77dPfYd5ALgJpnPPksFnO2fX5PlJe35mZQlVYPxYNzuNm50+NxtBFd7zunecvXr1KqyLZBzMlDmakklQFkolmGKs6zINMXQa/8+Pzhy4JUZSzxwNY7s3bf7sSTaOtlpHWz/qCOecx0BnsG2rrA+C2xGhVBztXL169axMcHRhGheYYKZZzzyRs6NrG311osLVk5luOFcbPa6c4N39cBKtr68fBhdep40f7fRkUUs8tJqZC/UZ1A7XXH1tU2z/rnpP2/6nfn830/YGOGpz/eyAG8FBkhqxpuYCD3RsYK4af5O0KCqi6crydNk0QGqUzde72UZXGAiL+a3J/FGYzre7DeowTcaywQ/2usrmllo8cQlK93cgZtHOCEplclypkrTIm/x0ji6KLKjDKgkxWp2+QYdz4/lB50WVodcXtwi9WLjlrDp0yMzIZ0bMRD4TMTP2mTEz4DPAzMRnJszEPhMzM/WZKTOJzyTMfPKZT8zc+cwdM6nPpAuScZUFicKIxeJ7/GgOO7uDq8GnmdLBuMh/pQNTC6McH83J421MkDW+c993znctfKZgpvSZkpnPPvOZmcpnKmaUzyhmtM9oZmY+M2Om9pmamXufuWfmwWcemHn0mUdmvvjMl4Ut81wAYGYu2uO9boJkbkNpNBFh045bT22UuBZkC15wEh4xLGKjjhgWgVGPGRZRUQPDIiTqCcMiHuqYYREM9ZRhEQn1jGERBvUnhkUM1HcMiwCoU4ZTAWcMZwIWCy1XuGBYiLkuGRZKrj8zLGRcVwwLDdeKYSU3lWHdvyZSujXDQrf1PcNCtPUDw0Kx9SPDQq71F4adVndSMJ+p6dNe1aNbsKLrPZfBKq/3ZAYrv96zGawGe09nsELsPZ/BqrH3hAYryd4zGqwue09p5J49p8EqtPekBivT3rMarFa7p7XjMp/LJPfsSQxWur1nMVj99p7GYEXcex6DVXLviQxWzr1nMlhN957KYIXdey6DVXfvyQxW4r1nM1id957OYMXeez6DVfzzJzTGQpVEbYWSbXB8bHDYZJsMbwp4i+EtAW8zvC3gHYZ3BLzL8K6A9xjeE/A+w/sCPmD4QMDvGH4n4EOGDwU8YHgg4COGjwR8zPCxgE8YPhHwKcOnAj5j+EzA5wyfC3jI8FDAFwxfCPiS4UsBXzF8JeBrhq8FfMPwjYDfM/xewB8Y/vD88eqLDqzqhEY3hH5JeoLblNyWz21JbtvntiW343M7ktv1uV3J7fncnuT2fW5fcgc+dyC5dz73TnKHPncouYHPDSR35HNHkjv2uWPJnfjcieROfe5Ucmc+dya5c587l9zQ54aSu/C5C8ld+tyl5K587kpy1z53Lbkbn7uR3Hufey+5Dz7nZH8lS4j6C9DnCPzs+rrtWxc5zN3nWYdlMwvdZpw02prY4H49XDewQEYW4TqEqhBEuPqg2gMRrjnqZiRcaVCdgQjXF1RdIMJVBdUUiHAtQZUEIlxBUP2ACNcNVDUgwtUC1QqIpGIdLMKVAdUFiORi/SzCVQDVAIhw7qfMjwhnfMr3iHCepyyPiBILbhHO6XWzLWJTaotw/qbsjQhnbcrZiHCupkyNCGdoys+I9FWjfhlah2k5NftNv1sF1qNGHKQLB/JHLX4y0VBpmI3Gpoe9YKLIIDY4/WaYJGnk6AB0iAj+z5BK4sx0pd8MO+E2om0nMp/L8c+NWJ2FYo3YQqGOxaTmRqDOQoFO2EJxxmyhMKds4XDFWFGQn9hCMd6JtZkbEbYznxsBOgsXU6wiiq8QSzI3onMWiu4zWyi4SqzU3AitXaC5EZmzcKHFMqPAarZQXPdsobAe2EJRPbKFgvqyaL7zwjz7YHHKsagzzq2UWRHhjEr5FBHOo5RFEeHsSbkTEc6ZlDER4UxJeRIRzo+UHRHhrEg5ERHOhZQJEeEMSPkPEc57lPUQ4WxHuQ4RznGU4RDhzEZ5DRHOZ5TNEOEsRjkMEc5dlLkQ4YxF+QoRzlOUpRDh7ES5CRHOSZSREOFMRHkIEc4/lH0Q4axDOQcRzjWUaRD5IHaQ88JIpoXsdNocxLd4JVbPhb5hBk34t5NrYthwQxvHpKILyJX5sngbojSsAEU13TAnEN7RFntqkphHpZBHxTjJY3QWzlKDqEl7nS3myjzlHYJ+zsGoSMc/5mb0sMAg7D6pzRV9R2jzZuOPnlI3U9O2vsyVUL/edBjrX285jCNAbzuMY0DvOIyjQO86jONA7zmMI0HvO4xjQR84jKNBv3MYx4M+dBhHhB44jGNCHzmMo0IfO4zjQp84jCNDnzqMY0OfOYyjQ587jONDDx3GEaIvHMYxoi8dxlGirxzGcaKvHcaRom8cxrGi3zuMo0V/cJityFDIe1VYTi0bu8+5kfdxI94UMOsi3hIwSyPeFjCrI94RMAsk3hUwayTeEzDLJN4XMCslPhAwiyV+J2DWS3woYJZMPBAwqyY+EjALJz4WMGsnPhEwyyc+FTArKD4TMIsoPhcw6ygeCpilFF8ImNUUXwqYBRVfCZg1FV8LmGUV3wiYlRW/FzCLK/4gYFfx49HWlGqqfYoyEuJSm4yyttQWoywttc0oKetlsE3fZMwUBGGgQAd46xTGwc5qMIIoNLieJiq4L2bpGCG0IFD0vQfWkrMqMG/3FCk6Mu+7wEOJtSV9meu+Ut/lO7I61R6jLE61zyhrUx0wytJU7xhlZapDRlmYasAo61IdMcqyVMeMsirVCaMsSnXKKGtSnTHKklTnjLIi1ZBRFqS6YJT1qC4ZZTmqK0ZZjeqaURajumGUtajeM8pSVB8YbR+55Fj3AX2ECO3DlqYIBK4ABn7xb8rDDbZQqptsoUS32EJpbrOFh90OWyiiXbZQPHtsoWj22UKxHLCFInnHForjkC0UxYAtFMMRWyiCY7Zw80/Ywk0/ZQs3+4wt3ORztnBzh2zhpl6whZt5yRZu4hVbuHnXbOGm3bCFm/WeLdykD+J+TaXVVFlmy0BumbYVFx4pJn7phT0MYouuBveJnhYzHWC5E9xjSiuh8gsi4IrIq4aa2+tWA9TwSSEIVC5Bp14CKpigUzEBlUzQqZmAiiboVE1AZRN06iagwgk6lRNQ6QSd2gmoeIJO9QRUPkGnfgIqoKBTQQGVUNCpoYCKKOhUUUBlFHTqKKBCCjqVFFApBZ1aCqiYgk41BVROQaeeAiqooFNRAZVU0KmpgIoq6FRVQGUVdOoqoMIKOpUVUGkFndoKqLiCTnUFVF5Bp74CKrBAVFj4SQFTjq5mEMzyMVTpo3lpaRzqMIghhwqzjbEThUofzUzq8WVbmqaLefnD/LbK5mRQ4jNeISuTKsGU5/Vv3x0cPVK6o9dAzE0wP3Z8uzdEpqHGT+r+LbyWp7Ll6aJvMFkxhvRrE6EG7Uys9eQ+TaPTrzUqdZKOoWl5S0Y7+rYHHhO6iKahMu/WhjNd0CcoqLwRdl5gLW2bdoxNl6cDGIPXzpo97Sok8NBx7ayJWojoGZrfOA3LNIxg0b5RM2iARfAyaK795fX77yzajLfTHchAiZd2Bl32fCFze+fUzEqxxh0yrRbuuZtPVBAv2idpXSrSPEdjJZMEqq5rVUx0Fj5wSwd022GyKOglJvuQ7amXMp2Z2X8xTwJ89nCwkG8wHQ6ebOBVWPEIjNH1r/FXWOHeV4VoOXyyAVtFzbQxjECvi3RShZl5IDW9LyosUFX4qIIXg+/fvDBv79B76bPcvoWqStx/RW+PvbiFNBVt3APRl8EmJkAM+dz894jxDpl5i81UwdapaG1eIS1mMeVMKooTDavkXhXBuADj7j65S0oYJ+Fa5xXkospS8/B+MR98/3rRQxY5GG69j9P31O9NH1capuxhSAuD72+TfKIfu6FThpV5OIzHRmiCZQh41qowhiDJg7xoCnoND2vB1rRQZnkKUwBG02AbP/vm8CsVjIribm3Ze5xzUprTuah+gxqvYhoA/r5dNVdfa2jOSdsQr/pdklqxGf3/TIsLFNSFecMvBX0bjjDO0uJ+VEF4t0x/JfEf5uff2r+JeHpx9WZt/e3at2ffrvzut83fS/x86Z+X/mXp10vrS/++9Lul/aXTpculaAmWfr/0h6U/rv9+/b/W/3v9f2zTn/6k6fNPS97P+v/+P5RPXMc= F AAAyCXiclVvbctzIkaW9ttfm2t7x+tEvCFMKX4JiiNLErv1m3kmxeb9KQ80EGp2NhoibUNUgqY7eH/Cr/SF+c/jVX+Hf8Bc4KwuFzAJBTZgREpHnVCXqcrIyGw0OyzRR+uXLf3znu//xve//4D9/+KPF//rxT37631/87H8uVTGtIriIirSoroehgjTJ4UInOoXrsoIwG6ZwNbzdMPxVDZVKivxcP5TwPgvjPBknUagROtn+5oullysv6Sd4fLHaXCwtND/H3/zs5T9vRkU0zSDXURoq9dXqy1K/n4WVTqIU5os3UwVlGN2GMXyFl3mYgXo/o5HOg+eIjIJxUeG/XAeEyh6zMFPqIRtiyyzUE9XlDNjHfTXV49+9nyV5OdWQR/ZG42ka6CIw0w5GSQWRTh/wIoyqBMcaRJOwCiONi+PdZZh5c5jpBCcwX1x8bn6Cw62r4GDtfDfY3NreO9w73zs6PAuIWuwb6zL+NjNVy8bt4vPgIKxuA4VDwdVXQTEOorC012ZRKhhDVSV5bMY9SupEuWbjJJ5WgCPN4S4qsizMR7MbBFMY6/lsdgNZ8OsBXv9mPn/UJsKtgsq12iCrr12VxJPW2akx+lrponRtzouyr8Ww0LrIXKN1sh61a+YdumbhUy2GrsXwqRaRaxE91WLkWoxMC9yGXZxdamYYhAG2N7qAMYbQKMC1yXwfeG3A+Ver79HLcBwsrRon6GWbNsXuGqoOloO0uIPqRYQBubJ4gy5pWWG8tDqzG/j/N2jNyEFfdxxuosN0JdhGMSiNMWX2XpkdQ9563HYet7seidZ3hbvn0qvmripwjQKcUWO8cj0+TsMRd1l6vfTlo27LbR939Vq6+pKmc2ZV/dnlQOXbwTch4K1HjwO3ILb3met91tP71PWimL8r2ihbaRfG3l3RyrQx+MTSdB1OKoCuS+Fv6fVjj7xqwvfrx77DPADcBNO5Z8ngo52za/L0pD0/07KEKjB+rJutxs1Wn5u1oArveN07zl68eBHWRTIKpsocTck4KAulEkwx1nWZhhg6jf+nR2cO3BIjqWeOhrHdmzb/9iQbRxuto41vdYRzzmOgM9i2VdYHwe2IUCqOdq5evHhSJji6MI0LTDCTrGeeyNnRtY0+O1Hh6tFM15yrtR5XTvDufjiJ1tfnD4Nzr9Pat3Z6tKglHlrNzIX6DGqHa64+tym2f1e9x23/Y7+/m2l7Axy1uX5ywI3gIEmNWFNzgQc6NjBXjb9xWhQV0XRlebpsGiA1zGar3WyjKwyE+ezGZP4oTGeb3QZ1mCYj2eAbe11lM0vNH7kEpfs7EDNvZwSlMjmuVEla5E1+OkUXRRbUYZWEGK1O36DDmfF8r/OiytDrsxuEns3dclYdOmRm6DNDZiKfiZgZ+cyIGfAZYGbsM2NmYp+JmZn4zISZxGcSZj74zAdmbn3mlpnUZ9I5ybjKgkRhxGLxPXowh53dweXgw1TpYFTkv9KBqYVRjg/m5PE2Jsga37nvO+e7Fj5TMFP6TMnMR5/5yEzlMxUzymcUM9pnNDNTn5kyU/tMzcydz9wxc+8z98w8+MwDM5985tPclnkuADAzF+3xXjdBMrOhNByLsGnHrSc2SlwLsgUvOAkPGRaxUUcMi8CoRwyLqKiBYRES9ZhhEQ91zLAIhnrCsIiEesqwCIP6A8MiBupbhkUA1CnDqYAzhjMBi4WWK1wwLMRclwwLJdcfGRYyriuGhYZrxbCSm8qw7l8TKd2aYaHb+o5hIdr6nmGh2PqBYSHX+hPDTqtbKZjP1PRpr+rRLVjR9Z7LYJXXezKDlV/v2QxWg72nM1gh9p7PYNXYe0KDlWTvGQ1Wl72nNHJPntNgFdp7UoOVae9ZDVar3dPacZnPZZJ78iQGK93esxisfntPY7Ai7j2PwSq590QGK+feMxmspntPZbDC7j2Xwaq792QGK/HesxmszntPZ7Bi7z2fwSr+6RMaY6FKorZCydY4PtY4bLJ1htcFvMHwhoA3Gd4U8BbDWwLeZnhbwDsM7wh4l+FdAe8xvCfgNwy/EfA+w/sCHjA8EPABwwcCPmT4UMBHDB8J+JjhYwGfMHwi4FOGTwV8xvCZgM8ZPhfwBcMXAr5k+FLAVwxfCfia4WsBv2X4rYDfMfzu6ePVFx1Y1QmNrgn9kvQEty65DZ/bkNymz21KbsvntiS37XPbktvxuR3J7frcruT2fG5Pcm987o3k9n1uX3IDnxtI7sDnDiR36HOHkjvyuSPJHfvcseROfO5Ecqc+dyq5M587k9y5z51L7sLnLiR36XOXkrvyuSvJXfvcteTe+txbyb3zOSf7S1lC1J+APkfgZ9eXbd+6yGHmPs86LJta6CbjpNHWxAb36+G6gQUytAjXIVSFIMLVB9UeiHDNUTcj4UqD6gxEuL6g6gIRriqopkCEawmqJBDhCoLqB0S4bqCqARGuFqhWQCQV62ARrgyoLkAkF+tnEa4CqAZAhHM/ZX5EOONTvkeE8zxleUSUWHCLcE6vm20Rm1JbhPM3ZW9EOGtTzkaEczVlakQ4Q1N+RqSvGvXL0DpMy4nZb/rdKrAeNuIgXTiQP2rxk4mGSsNsODI97AUTRQaxwek3wyRJI0cHoENE8H+GVBJnpiv9ZtgJtxFtO5HZTI5/ZsTqLBRrxBYKdSQmNTMCdRYKdMwWijNmC4U5YQuHK8aKgvzAForxVqzNzIiwnfnMCNBZuJhiFVF8hViSmRGds1B0H9lCwVVipWZGaO0CzYzInIULLZYZBVazheK6YwuFdc8WiuqBLRTUp3nznRfm2XuLU45FnXFupcyKCGdUyqeIcB6lLIoIZ0/KnYhwzqSMiQhnSsqTiHB+pOyICGdFyomIcC6kTIgIZ0DKf4hw3qOshwhnO8p1iHCOowyHCGc2ymuIcD6jbIYIZzHKYYhw7qLMhQhnLMpXiHCeoiyFCGcnyk2IcE6ijIQIZyLKQ4hw/qHsgwhnHco5iHCuoUyDyDuxg5wXhjItZMeT5iC+wSuxei70DTNowr+dXBPDhjuzcUwqOodcmS+LNyFKwwpQVJM1cwLhHW2xp8aJeVQKeVSMkjxGZ+E0NYgat9fZfKbMU94z0E85GBbp6NvcDO/nGITdJ7W5ou8Ibd5s/NFT6mZq2taXuRLq1+sOY/3rDYdxBOhNh3EM6C2HcRTobYdxHOgdh3Ek6F2HcSzoPYdxNOg3DuN40PsO44jQA4dxTOgDh3FU6EOHcVzoI4dxZOhjh3Fs6BOHcXToU4dxfOgzh3GE6HOHcYzoC4dxlOhLh3Gc6CuHcaToa4dxrOi3DuNo0e8cZisyFPJOFZYTy8buc27kfdyI1wXMuog3BMzSiDcFzOqItwTMAom3BcwaiXcEzDKJdwXMSon3BMxiid8ImPUS7wuYJRMPBMyqiQ8EzMKJDwXM2omPBMzyiY8FzAqKTwTMIopPBcw6is8EzFKKzwXMaoovBMyCii8FzJqKrwTMsoqvBczKit8KmMUVvxOwq/jxaGtKNdU+RRkKcal1RllbaoNRlpbaZJSU9TzYpG8ypgqCMFCgA7x1CqNgazkYQhQaXE8SFdwV03SEEFoQKPreA2vJaRWYt3uKFB2Z913gvsTakr7MdV+pb/MdWZ1qh1EWp9pllLWp9hhlaao3jLIy1T6jLEw1YJR1qQ4YZVmqQ0ZZleqIURalOmaUNalOGGVJqlNGWZHqjFEWpDpnlPWoLhhlOapLRlmN6opRFqO6ZpS1qN4yylJU7xhtH7nkWPcBfYQI7cOWpggErgAGfvFvysM1tlCq62yhRDfYQmlusoWH3RZbKKJttlA8O2yhaHbZQrHssYUiecMWimOfLRTFgC0UwwFbKIJDtnDzj9jCTT9mCzf7hC3c5FO2cHPP2MJNPWcLN/OCLdzES7Zw867Ywk27Zgs36y1buEnvxP2aSqupssyWgdwybSsuPFJM/NILexjEFl0O7hI9KaY6wHInuMOUVkLlF0TAFZFXDTW3160GqOGjQhCoXIJOvQRUMEGnYgIqmaBTMwEVTdCpmoDKJujUTUCFE3QqJ6DSCTq1E1DxBJ3qCah8gk79BFRAQaeCAiqhoFNDARVR0KmigMoo6NRRQIUUdCopoFIKOrUUUDEFnWoKqJyCTj0FVFBBp6ICKqmgU1MBFVXQqaqAyiro1FVAhRV0Kiug0go6tRVQcQWd6gqovIJOfQVUYIGosPCTAqYcXU0hmOYjqNIH89LSKNRhEEMOFWYbYycKlT6cmtTjy7Y0Teez8pvZTZXNyKDEZ7xCViZVginP69++Ozh8oHRHr4GYm2B+7Ph2b4hMQo2f1P1beC2PZcvjed9gsmIE6ecmQg3amVjr0X2aRsefa1TqJB1B0/KGjHb0bQ88JnQRTUJl3q0Np7qgT1BQeSPsvMBa2jbtGJsujwcwAq+dNXvaVUjgoePaWRO1ENEzNL9xGpZpGMG8faNm0ADz4HnQXPvL6/ffmrcZb6s7kIESL+0MuuzpXOb2zqmZlWKNO2Razd1zN5+oIJ63T9K6VKR5jsZKxglUXdeqGOssvOeWDui2w2RR0EtM9iHbYy9lOjWz/2SeBPjs/mAu32DaHzzawMuw4hEYo+tf46+wwr2vCtHy7NEGbBQ108YwAr0q0nEVZuaB1OSuqLBAVeGDCp4Nvn71zLy9Q++lT3P7Fqoqcf8VvT327AbSVLRxD0SfB+uYADHkc/PfA8Y7ZOYtNlMFW6eitXmFtJjGlDOpKE40LJN7VQSjAoy7u+Q2KWGUhCudV5CLKkvNw/v5bPD1y3kPWeRguNU+Tt9Rv1d9XGmYsochLQy+vknysX7ohk4ZVubhMB4boQmWM8CzVoUxBEke5EVT0Gu4Xwk2JoUyy1OYAjCaBJv42TeHX6lgWBS3K4ve45yj0pzORfVb1HgV0wDw982yufpcQ3NO2oZ41e+S1IrN6P8nWpyjoM7NG34p6JtwiHGWFnfDCsLbRforid+bn/9t/ybi8cXlq5XV1ytfnny59IffNX8v8cOFXyz8cuHXC6sL/7fwh4XdheOFi4VoARb+uPCnhT+v/nH1L6t/Xf2bbfrd7zR9fr7g/az+/V8O0Fy6 Q AAAyJHiclVvLctvIFdXkOVEyyUyyzAYV2TWTlKyy7Klkshu9JYuSKIl6mh4XCF6CsPAyuglKZjE/kG3yC/ma7FJZZJNvye1uNO5tEPJUVGULfU7jAt19bt9DEBrkcSTk8+f/+eQHP/zRj3/y009/tvzzX3z2y199/sWvL0U2KQK4CLI4K64HvoA4SuFCRjKG67wAPxnEcDW421L8VQmFiLK0Jx9yeJP4YRqNosCXCJ2evv185fnac/3jLR6sVwcrS9VP9+0X65/1h1kwSSCVQewL8Xr9eS7fzPxCRkEM8+X+REDuB3d+CK/xMPUTEG9m+k7n3lNEht4oK/BfKj2N8jNmfiLEQzLAnokvx6LJKbCNez2Ro2/ezKI0n0hIA3Oh0ST2ZOapYXvDqIBAxg944AdFhPfqBWO/8AOJk+NcZZA4Y5jJCAcwX15+qn68450r72ijt+9t7+weHB/0Dk6Ozz1NLbfd6yr+ViMVqyrs8lPvyC/uPIG3grMvvGzkBX5ujtWkFDCCoojSUN33MCojYbuNonBSAN5pCtMgSxI/Hc76CMYwkvPZrA+J91UHj38/ny/0CXCpoLC9tnSrrV8RheM62JlqtPWSWW779LK8rccgkzJLbKdN3VroV43bt938x3oMbI/BYz0C2yN4rMfQ9hiqHrgM+zi6WI3Q8z3sr3QBI0yhoYdzk7gx8FiB89frbzDKYOStrKsgGGVXL4pZNVQdrHpxNoXiWYAJubbcx5B6WmG0sj4zC/iXPrZmOkDb6Xi7kfTjNW8XxSAk5pRae6FWDHkTcddG3G1G1LScZvaaKy+qqwrPdvJwRFXjhT3j/cQf0ikrL1e+XjhttT7HHr3kob7Wwzk3qv7odKDyzc1XKeDMR0sAOyHm7HN79nnL2Wf2LJ3z06zOsrV6YszVhZ6ZOgcfmZpmwHEB0AzJ4q28XIxIs8Ziv1yM7ace4CKok1umDN6bMdsujw/aiTPJcyg8FceE2anC7LSF2fAKf0rz3gj27Nkzv8yioTcRamuKRl6eCRFhiTGh89jH1KniP353asPNMZNaxqgYc3rV5/8eZBVoqw609b2BcMxpCHoPNn2FiaHh+o5QKpa2oZ49e1QmeHd+HGZYYMZJyziRM3dXd/roQFmohZFu2FAbLaGs4O31cBB1rI9vBj3npI3vPWlhUnPctKqRM/Up1NyuOvrYopjzm+rt1ud33fPtSOsL4F2r40dvuBIcRLESa6wOcEPHDuqoijeKs6zQtD4yvD6sOiA1SGbrzWojC0yE+ayvKn/gx7PtZofSj6Mh7/DWHBfJzFDzhZAgZPsJmpnXI4JcqBqXiyjO0qo+nWGILPFKv4h8zFarb5D+TEW+l2lWJBj1SR+hJ3M7nUWD9okZuMyAmMBlAmKGLjMkBlwGiBm5zIiY0GVCYsYuMyYmcpmImHcu846YO5e5IyZ2mXiuZVwkXiQwY9F8Dx/UZmdWcNV7NxHSG2bpl9JTXhjl+KB2HmdhvKSKnbqxU7pq5jIZMbnL5MS8d5n3xBQuUxAjXEYQI11GEjNxmQkxpcuUxExdZkrMvcvcE/PgMg/EfHCZD3Nj82wCYGXO6u29rJJkZlJpMGJpU9+3HJsssT10m/GM4/CAYJYbZUAwS4xySDDLihIIZilRjghm+VCGBLNkKMcEs0woJwSzNCjfEcxyoLwjmCVAGRMcMzghOGEwm2g+wxnBTMxlTjBTcvmeYCbjsiCYabgUBAu+qATL9jnh0i0JZrotpwQz0Zb3BDPFlg8EM7mWHwi2Wt2JQX2m1p/2ihbdghFd674MRnmtOzMY+bXuzWA02Lo7gxFi6/4MRo2tOzQYSbbu0WB02bpLI/foPg1Goa07NRiZtu7VYLTa3K0tl7hcwrlHd2Iw0m3di8Hot3U3BiPi1v0YjJJbd2Qwcm7dk8FounVXBiPs1n0ZjLpbd2YwEm/dm8HovHV3BiP21v0ZjOIf36ExF4ooqB1KskH5sUFpk2wSvMngLYK3GLxN8DaDdwjeYfAuwbsM3iN4j8H7BO8z+IDgAwa/IvgVgw8JPmRwh+AOg48IPmLwMcHHDD4h+ITBXYK7DD4l+JTBZwSfMfic4HMG9wjuMfiC4AsGXxJ8yeArgq8YfE3wNYNvCL5h8C3Bt49vr67owKiOaXSD6VdLj3GbnNtyuS3ObbvcNud2XG6Hc7sut8u5PZfb49y+y+1z7sDlDjj3yuVece7Q5Q4513G5DueOXO6Ic8cud8y5E5c74VzX5bqcO3W5U86dudwZ585d7pxzPZfrce7C5S44d+lyl5y7crkrzl273DXnblzuhnO3Lmdlf8ktRPkB9OcI/Oz6vD63zFKY2c+zFksmBuonVDRKEYWJX+H6mChrlxXlWuWyghkyMAhZFG1QECFjom0JImRHyuomyYRoC4IIWQ9tPBAhw6HtBiJkM7TJQITMhbYWiJCl0IYCETIS2kYgErMpMgiZBm0ZEEnZ1BqEDIK2B4iQLdCmABEyA9oKIFKwmTeIYBNuECr3ZbVibL1Kg1Bp14UdESroupwjQmVcF3FEqHjr0o1Im1F1HWrpx/lYrbf+XYuzHFTi0LqwIH0Ko4cWFRX7yWCozjAHRGQJhArXvwnWalVKtQAGRAT/J8iKtxKuha1wK9HWA5nN+P3PlFhtC8UaUAuFOmSDmimB2hYKdEQtFGdILRTmmFp4u+xeUZDvqIVivGNzM1MirEc+UwK0LZxMNosovoxNyUyJzrZQdO+phYIr2EzNlNDqCZopkdkWTjSbZhRYSS0U15RaKKx7aqGoHqiFgvowr74OwxJ8b3BdflFnVHZ10UWEiq0utYhQidUFFhEqrLqsIkLlVBdTRKiI6hKKCJVOXTgRoYKpyyUiVCZ1kUSEiqMujYhQSdQFEREqhLoMIkLlTxc/RKjo6ZKHCJU6XegQoQKnyxsiVNZ0UUOEipkuZYhQCdMFDBEqXLpsIULlShcrRKhI6RKFCJUmXZgQoYKkyxEiVIZ0EULklq0g1YUBLwtJd1xtxH08YrNnU18xnSr968GxAnRuCxCqqAepUN8jb0MQ+wWgqMYbagfCKxofKEaReooKaZANozTEYP4kVogY1cfJfCbUA+BzkI8FGGTx8PvCDO7nmITNh7ip0F8fmpJaxdMPsKuhSWM9U8HULzctRvqXWxajDJDbFqMckDsWoyyQuxajPJB7FqNMkPsWo1yQBxajbJCvLEb5IA8tRhkhOxajnJBHFqOskMcWo7yQJxajzJBdi1FuyFOLUXbIM4tRfshzi1GGyJ7FKEfkhcUoS+SlxShP5JXFKFPktcUoV+SNxShb5K3FjFlDIe8Vfj42bGg/AgfOJ5Fwk8Gki3CLwSSNcJvBpI5wh8EkkHCXwaSRcI/BJJNwn8GklPCAwSSW8BWDSS/hIYNJMmGHwaSa8IjBJJzwmMGknfCEwSSfsMtgUlB4ymASUXjGYNJReM5gklLYYzCpKbxgMAkqvGQwaSq8YjDJKrxmMCkrvGEwiSu8ZbD9MIBbW2XVRP2AZcDEJTYJJW2JLUJJWmKbUK2sp962/pJjIsDzPQHSw0vHMPR2Vr0BBL7C5TgS3jSbxEOEsAWe0F+JoJecFJ568SeLMZB6FQbuc/SW+nte+237Ll2R1Cn2CCVxin1CSZvigFCSpnhFKClTHBJKwhQdQkmX4ohQkqU4JpRUKU4IJVGKLqGkSXFKKElSnBFKihTnhJIgRY9Q0qO4IJTkKC4JJTWKK0JJjOKaUNKiuCGUpChuCa2fxqTo+0B/hPDNc5jKBAI5gI5r/pU93KAWSnWTWijRLWqhNLephZvdDrVQRLvUQvHsUQtFs08tFMsBtVAkr6iF4jikFoqiQy0UwxG1UATH1MLFP6EWLnqXWrjYp9TCRT6jFi7uObVwUXvUwsW8oBYu4iW1cPGuqIWLdk0tXKwbauEi3bLrVU6rcllqyYAvmTSOC7cUlb/6XT5MYoOuetNIjrOJ9NDueFMsaTkUriECckSOG6ouL2sN6I4LRhC0XYKGXwJtmKDhmEBbJmh4JtCmCRquCbRtgoZvAm2coOGcQFsnaHgn0OYJGu4JtH2Chn8CbaCg4aBAWyhoeCjQJgoaLgq0jYKGjwJtpKDhpEBbKWh4KdBmChpuCrSdgoafAm2ooOGoQFsqaHgq0KYKGq4KtK2Chq8Cbayg4axAWytoeCvQ5goa7gq0vYKGvwJtsIA5LPykgCVHFhPwJukQivhBvc809KXvhZBCgdVGtSOBSh9MVOlxZZurrvNZ/nbWL5KZbujCp6JCkkdFhCXPOb9+rXDwoMudfkNEXQTrYyO2fXlk7Ev8pO5ewunZ5T2787abSbIhxB8biO5Qj8S0Fq5Tdep+rFMuo3gIVc++btR3X5+B24TMgrEv1Gu3/kRm+hMUFM4dNt5tzU2f+h6rUxZvYAhOP9Ns6VcggZuO7WeaqIVAP0NzO8d+HvsBzOuXbToVMPeeetWxO73u+TvzuuLtNG+kI9j7PJ0mezbntb2xayY5m+MGGRdz+9zNJQoI5/WTtCYVSBqjakWjCIpmaJGNZOLfU08LNPthscj0+03mIdtilDyeqNF/UE8CXPawM+cvNx12Fhbw0i/oDlSjGV/iL7/AtS8y1vN8YQG2spJo1VACvcriUeEn6oHUeJoVaFCF/yC8J53vXjxRL/boV9YnqXlBVeS4/kK/WPakD3HM+tgHok+9TSyAmPKp+u8B8x0S9YKbcsEmKOut3i7NJqGumdoURxJWdXiRecMMVLhpdBflMIz8tcbbyVmRxOq5/nzW+e75vIXMUlDcehsnp/q8F21crpi8hdFa6HzXj9KRfGimTu4X6uEwbhu+SpZzwL1W+CF4UeqlWWXoJdyveVvjTKjpyZQBDMbeNn72TeFL4Q2y7G5t2Xmcc5Kr3Tkr/oAaL0J9A/i7v6qOPtZR7ZOmIx61h9RqxW76/0d69FBQPfXyXwyy7w8wz+JsOijAv1vWf0DxZ/Xzx/rPJRYPLl+srb9c+/r065Vvv6n+lOLTpd8u/W7pq6X1pT8tfbu0v9RdulgKlmDpr0t/W/r7+j/W/7n+r/V/m64/+KQ65zdLzs/6f/8HIEFnYA== v j f ⇠ N ( µ j , j ) AAAyUniclVvbctzGEV3HuTiMncjJY16QUCrbKYolUq6KH837bXm/UyupsNheLEjchJkFSW1tfiJfk9fkF/KSX8lTemYw6B4sKFdYJRJzzqCBmTk9fRYL9fM4EvLVq/989rPPf/6LX/7qi1/P/ebLr377u2df//5CZOMigPMgi7Piqu8LiKMUzmUkY7jKC/CTfgyX/bs1xV+WUIgoS8/kYw5vEz9Mo2EU+BKh989e9sry/fDdbe9PPREl+Dvx5Sjw48nB9NtemYzf3S54vVJEYeK/u/3u/bP5V4uv9I83e7BUHcx3qp+j918vfdUbZME4gVQGsS/Em6VXuXw78QsZBTFM53pjAbkf3PkhvMHD1E9AvJ3ocU29F4gMvGFW4L9UehrlZ0z8RIjHpI891W2LJqfANu7NWA5/eDuJ0nwsIQ3MhYbj2JOZpybJG0QFBDJ+xAM/KCK8Vy8Y+YUfSJxK5yr9xBnDREY4gOnc3Av14x1sXHr7K2fb3vrG5s7BztnO4cGpp6m5tntdwL9qpGJBhZ174e37xZ0n8FZwrYSXDb3Az82xmpQChlAUURqq+x5EZSRst2EUjgvAO03hPsiSxE8Hkx6CMQzldDLpQeJ928Xj76bTmT4BLhUUtteabrX1K6JwVAc7UY22XjLLbZ+zLG/r0c+kzBLbaVW3ZvpV4/ZtN/+pHn3bo/9Uj8D2CJ7qMbA9BqoHLsM2ji5WI/R8D/srXcAQE27g4dwkbgw8VuD0zdJbjNIfevNLKghG2dSLYlYNVQcLXpzdQ/EywPRdnOthSD2tMJxfmpgF/FsPWxMdoO10vN1I+vGit4liEBJzSq29UCuGvIm4aSNuNiNqWt5n9przy9VVhWc7eTiiqrFsz/gw9gd0yvzr+e9nTluoz7FHr3mo7/VwTo2qPzkdqHxz81UKOPPREsBOiDn71J592nL2iT1L5/x9VmfZYj0x5upCz0ydg09MTTPgqABohmTx5l/PRqRZY7Ffz8b2Uw9wEdTJLVMGH8yYbZenB+3EGec5FJ6KY8JsVGE22sKseIV/T/PeCPby5Uu/zKKBNxZqa4qGXp4JEWFBMqHz2MfUqeI/fXdqw80xk1rGqBhzetXn/x5kFWitDrT2k4FwzGkIeg82fYWJoeH6jlAqlrahXr58UiZ4d34cZlhgRknLOJEzd1d3+uRAWaiZka7YUCstoazg7fVwEHWsT28GZ85JKz950syk5rhpVSNn6lOouV119KlFMec31XtUn3/knm9HWl8A71odP3nDleAgipVYY3WAGzp2UEdVvGGcZYWm9ZHh9WHVAal+MllqVhtZYCJMJ7XjWm92KP04GvAO781xkUwMNZ0JCUK2n6CZaT0iyIWqcbmI4iyt6tMJhsgSr/SLyMdstfoG6U9U5AeZZkWCUZ/3EHo+tdNZNGifmL7L9IkJXCYgZuAyA2LAZYCYocsMiQldJiRm5DIjYiKXiYi5dZlbYu5c5o6Y2GXiqZZxkXiRwIxFqz54VJudWcEF73YspDfI0m+kp7wwyvFR7TzOwnhJFTt1Y6d01cxlMmJyl8mJ+eAyH4gpXKYgRriMIEa6jCRm7DJjYkqXKYm5d5l7Yh5c5oGYR5d5JOajy3ycGptnEwArc1Zv72WVJBOTSv0hS5v6vuXIZIntoduMZxyH+wSz3CgDgllilAOCWVaUQDBLiXJIMMuHMiSYJUM5IphlQjkmmKVBeUswy4HyjmCWAGVMcMzghOCEwWyi+QxnBDMxlznBTMnlB4KZjMuCYKbhUhAs+KISLNvnhEu3JJjptrwnmIm2fCCYKbZ8JJjJtfxIsNXqRgzqM7X+tFe06BaM6Fr3ZTDKa92ZwcivdW8Go8HW3RmMEFv3ZzBqbN2hwUiydY8Go8vWXRq5J/dpMApt3anByLR1rwaj1eZubbnE5RLOPbkTg5Fu614MRr+tuzEYEbfux2CU3Lojg5Fz654MRtOtuzIYYbfuy2DU3bozg5F4694MRuetuzMYsbfuz2AU//QOjblQREHtUJIVyo8VSptkleBVBq8RvMbgdYLXGbxB8AaDNwneZPAWwVsM3iZ4m8E7BO8weJfgXQbvEbzH4C7BXQbvE7zP4AOCDxh8SPAhg48IPmLwMcHHDD4h+ITBpwSfMviM4DMGnxN8zuALgi8YfEnwJYOvCL5i8DXB1wy+Ifjm6e3VFR0Y1TGNrjD9aukxbpVzay63xrl1l1vn3IbLbXBu0+U2Obflcluc23a5bc7tuNwO53Zdbpdzey63x7muy3U5t+9y+5w7cLkDzh263CHnjlzuiHPHLnfMuROXO+Hcqcudcu7M5c44d+5y55y7cLkLzl263CXnrlzuinPXLnfNuRuXs7K/4Bai/Aj6cwR+dn1Vn1tmKUzs51mLJWMD9RIqGuY7gwrXx0RZu6wo1yqXFcyQvkHIomiDgggZE21LECE7UlY3SSZEWxBEyHpo44EIGQ5tNxAhm6FNBiJkLrS1QIQshTYUiJCR0DYCkZhNkUHINGjLgEjKptYgZBC0PUCEbIE2BYiQGdBWAJGCzbxBBJtwg1C5L6sVY+tVGoRKuy7siFBB1+UcESrjuogjQsVbl25E2oyq61BLP85Har3131qcZb8Sh9aFBelTGD20qKjYT/oDdYY5ICJLIFS4/kuwVqtSqgUwICL4myAr3kq4FrbCrURbD2Qy4fc/UWK1LRRrQC0U6oANaqIEalso0CG1UJwhtVCYI2rh7bJ7RUHeUgvFeMfmZqJEWI98ogRoWziZbBZRfBmbkokSnW2h6D5QCwVXsJmaKKHVEzRRIrMtnGg2zSiwkloorntqobAeqIWieqQWCurjtPo6DEvwg8F1+UWdUdnVRRcRKra61CJCJVYXWESosOqyigiVU11MEaEiqksoIlQ6deFEhAqmLpeIUJnURRIRKo66NCJCJVEXRESoEOoyiAiVP138EKGip0seIlTqdKFDhAqcLm+IUFnTRQ0RKma6lCFCJUwXMESocOmyhQiVK12sEKEipUsUIlSadGFChAqSLkeIUBnSRQiRG7aCVBf6vCwkR6NqI+7hEZs9m/qK6VbpXw+OFaBTW4BQRWeQCvU98joEsV8Aimq0onYgvKLxgWIYqaeokAbZIEpDDOaPY4WIYX2cTCdCPQA+BflUgH4WD34qTP9hiknYfIibCv31oSmpVTz9ALsamjTWMxVM/XLVYqR/uWYxygC5bjHKAblhMcoCuWkxygO5ZTHKBLltMcoFuWMxyga5azHKB7lnMcoI2bUY5YTctxhlhTywGOWFPLQYZYY8shjlhjy2GGWHPLEY5Yc8tRhliDyzGOWIPLcYZYm8sBjliby0GGWKvLIY5Yq8thhli7yxmDFrKOStws9Hhg3tR+DA+SQSrjKYdBGuMZikEa4zmNQRbjCYBBJuMpg0Em4xmGQSbjOYlBLuMJjEEu4ymPQS7jGYJBN2GUyqCfcZTMIJDxhM2gkPGUzyCY8YTAoKjxlMIgpPGEw6Ck8ZTFIKzxhMagrPGUyCCi8YTJoKLxlMsgqvGEzKCq8ZTOIKbxhsPwzg1lZZNVE/YOkzcYlVQklbYo1QkpZYJ1Qr64W3rr/kGAvwfE+A9PDSMQy8jQWvD4GvcDmKhHefjeMBQtgCT+ivRNBLjgtPvfiTxRhIvQoDDzl6S/09r/22fZOuSOoUW4SSOMU2oaRNsUMoSVPsEkrKFHuEkjBFl1DSpdgnlGQpDgglVYpDQkmU4ohQ0qQ4JpQkKU4IJUWKU0JJkOKMUNKjOCeU5CguCCU1iktCSYziilDSorgmlKQobgitn8ak6PtAf4TwzXOYygQCOYCua/6VPVyhFkp1lVoo0TVqoTTXqYWb3Qa1UESb1ELxbFELRbNNLRTLDrVQJLvUQnHsUQtF0aUWimGfWiiCA2rh4h9SCxf9iFq42MfUwkU+oRYu7im1cFHPqIWLeU4tXMQLauHiXVILF+2KWrhY19TCRbph16ucVuWy1JIBXzJpHBduKSp/9bt8mMQGXfDuIznKxtJDu+PdY0nLoXANEZAjctxQdXlZa0B3nDGCoO0SNPwSaMMEDccE2jJBwzOBNk3QcE2gbRM0fBNo4wQN5wTaOkHDO4E2T9BwT6DtEzT8E2gDBQ0HBdpCQcNDgTZR0HBRoG0UNHwUaCMFDScF2kpBw0uBNlPQcFOg7RQ0/BRoQwUNRwXaUkHDU4E2VdBwVaBtFTR8FWhjBQ1nBdpaQcNbgTZX0HBXoO0VNPwVaIMFzGHhJwUsObIYgzdOB1DEj+p9poEvfS+EFAqsNqodCVR6f6xKjyvbXHWdTvL3k16RTHRDFz4VFZI8KiIsec759WuF/Udd7vQbIuoiWB8bse3LIyNf4id19xJOzyPe82jadjNJNoD4UwPRHeqRmNbMdapOR5/qlMsoHkDVs6cb9d3XZ+A2IbNg5Av12q0/lpn+BAWFc4eNd1tz06e+x+qU2RsYgNPPNFv6FUjgpmP7mSZqIdDP0NzOsZ/HfgDT+mWbbgVMvRdedexOr3v+xrSueBvNG+kK9j5Pt8meTHltb+yaSc7muEHGxdQ+d3OJAsJp/SStSQWSxqha0TCCohlaZEOZ+A/U0wLNflgsMv1+k3nINhslj8dq9B/VkwCX3etO+ctNe92ZBbzwC7oD1WjGl/jHL3Dti4z1PJ1ZgLWsJFo1lEAvs3hY+Il6IDW6zwo0qMJ/FN7z7rvl5+rFHv3K+jg1L6iKHNdf6BfLnvcgjlkf+0D0hbeKBRBTPlW/HjHfIVEvuCkXbIKy3urt0mwc6pqpTXEkYUGHF5k3yECFu4/uohwGkb/YeDs5K5JYPdefTrrvXk1byCwFxS21cfJen7fcxuWKyVsYrYXuu16UDuVjM3Vyv1APh3Hb8FWynALutcIPwYtSL80qQy/hYdFbG2VCTU+mDGAw8tbxs28K3wivn2V3i3PO45zDXO3OWfEX1HgR6hvAv70FdfSpjmqfNB3xqD2kVit207+f6HGGgjpTL//FIHt+H/Mszu77Bfh3c++fzS81/7vE7MHF8uLS68Xl4+/nf/yh+q8UX3T+2Plz59vOUuevnR87252jznkn6Py984/OPzv/Wvr30n+XP1v+3HT92WfVOX/oOD/LX/4PoW12ew== K AAAyJHiclVvLctvIFdVMXhMlk8wky2xQkV0zSckqy57KYzd6SxYlURL1ND0uELwEYeFldBOUzGJ+INvkF/I12aWyyCbfktvdaNzbIOSpqMoW+pzGBbr73L6HIDTI40jI58//88mnP/jhj378k89+uvyzn3/+i19+8eWvLkU2KQK4CLI4K64HvoA4SuFCRjKG67wAPxnEcDW421L8VQmFiLK0Jx9yeJP4YRqNosCXCJ0evv1i5fnac/3jLR6sVwcrS9VP9+2X65/3h1kwSSCVQewL8Xr9eS7fzPxCRkEM8+X+REDuB3d+CK/xMPUTEG9m+k7n3lNEht4oK/BfKj2N8jNmfiLEQzLAnokvx6LJKbCNez2Roz+9mUVpPpGQBuZCo0nsycxTw/aGUQGBjB/wwA+KCO/VC8Z+4QcSJ8e5yiBxxjCTEQ5gvrz8VP14xztX3tFGb9/b3tk9OD7oHZwcn3uaWm6711X8rUYqVlXY5afekV/ceQJvBWdfeNnIC/zcHKtJKWAERRGlobrvYVRGwnYbReGkALzTFKZBliR+Opz1EYxhJOezWR8S7+sOHv9uPl/oE+BSQWF7belWW78iCsd1sDPVaOsls9z26WV5W49BJmWW2E6burXQrxq3b7v5j/UY2B6Dx3oEtkfwWI+h7TFUPXAZ9nF0sRqh53vYX+kCRphCQw/nJnFj4LEC56/X32CUwchbWVdBMMquXhSzaqg6WPXibArFswATcm25jyH1tMJoZX1mFvAvfWzNdIC20/F2I+nHa94uikFIzCm19kKtGPIm4q6NuNuMqGk5zew1V15UVxWe7eThiKrGC3vG+4k/pFNWXq58s3Daan2OPXrJQ32jh3NuVP3R6UDlm5uvUsCZj5YAdkLM2ef27POWs8/sWTrnp1mdZWv1xJirCz0zdQ4+MjXNgOMCoBmSxVt5uRiRZo3FfrkY2089wEVQJ7dMGbw3Y7ZdHh+0E2eS51B4Ko4Js1OF2WkLs+EV/pTmvRHs2bNnfplFQ28i1NYUjbw8EyLCEmNC57GPqVPFf/zu1IabYya1jFEx5vSqz/89yCrQVh1o63sD4ZjTEPQebPoKE0PD9R2hVCxtQz179qhM8O78OMywwIyTlnEiZ+6u7vTRgbJQCyPdsKE2WkJZwdvr4SDqWB/fDHrOSRvfe9LCpOa4aVUjZ+pTqLlddfSxRTHnN9Xbrc/vuufbkdYXwLtWx4/ecCU4iGIl1lgd4IaOHdRRFW8UZ1mhaX1keH1YdUBqkMzWm9VGFpgI81lfVf7Aj2fbzQ6lH0dD3uGtOS6SmaHmCyFByPYTNDOvRwS5UDUuF1GcpVV9OsMQWeKVfhH5mK1W3yD9mYp8L9OsSDDqkz5CT+Z2OosG7RMzcJkBMYHLBMQMXWZIDLgMEDNymRExocuExIxdZkxM5DIRMe9c5h0xdy5zR0zsMvFcy7hIvEhgxqL5Hj6ozc6s4Kr3biKkN8zSr6SnvDDK8UHtPM7CeEkVO3Vjp3TVzGUyYnKXyYl57zLviSlcpiBGuIwgRrqMJGbiMhNiSpcpiZm6zJSYe5e5J+bBZR6I+eAyH+bG5tkEwMqc1dt7WSXJzKTSYMTSpr5vOTZZYnvoNuMZx+EBwSw3yoBglhjlkGCWFSUQzFKiHBHM8qEMCWbJUI4JZplQTghmaVC+I5jlQHlHMEuAMiY4ZnBCcMJgNtF8hjOCmZjLnGCm5PI9wUzGZUEw03ApCBZ8UQmW7XPCpVsSzHRbTglmoi3vCWaKLR8IZnItPxBstboTg/pMrT/tFS26BSO61n0ZjPJad2Yw8mvdm8FosHV3BiPE1v0ZjBpbd2gwkmzdo8HosnWXRu7RfRqMQlt3ajAybd2rwWi1uVtbLnG5hHOP7sRgpNu6F4PRb+tuDEbErfsxGCW37shg5Ny6J4PRdOuuDEbYrfsyGHW37sxgJN66N4PReevuDEbsrfszGMU/vkNjLhRRUDuUZIPyY4PSJtkkeJPBWwRvMXib4G0G7xC8w+BdgncZvEfwHoP3Cd5n8AHBBwx+RfArBh8SfMjgDsEdBh8RfMTgY4KPGXxC8AmDuwR3GXxK8CmDzwg+Y/A5wecM7hHcY/AFwRcMviT4ksFXBF8x+JrgawbfEHzD4FuCbx/fXl3RgVEd0+gG06+WHuM2Obflcluc23a5bc7tuNwO53Zdbpdzey63x7l9l9vn3IHLHXDulcu94tyhyx1yruNyHc4dudwR545d7phzJy53wrmuy3U5d+pyp5w7c7kzzp273Dnnei7X49yFy11w7tLlLjl35XJXnLt2uWvO3bjcDeduXc7K/pJbiPID6M8R+Nn1eX1umaUws59nLZZMDNRPqGiUIgoTv8L1MVHWLivKtcplBTNkYBCyKNqgIELGRNsSRMiOlNVNkgnRFgQRsh7aeCBChkPbDUTIZmiTgQiZC20tECFLoQ0FImQktI1AJGZTZBAyDdoyIJKyqTUIGQRtDxAhW6BNASJkBrQVQKRgM28QwSbcIFTuy2rF2HqVBqHSrgs7IlTQdTlHhMq4LuKIUPHWpRuRNqPqOtTSj/OxWm/9uxZnOajEoXVhQfoURg8tKir2k8FQnWEOiMgSCBWufxOs1aqUagEMiAj+T5AVbyVcC1vhVqKtBzKb8fufKbHaFoo1oBYKdcgGNVMCtS0U6IhaKM6QWijMMbXwdtm9oiDfUQvFeMfmZqZEWI98pgRoWziZbBZRfBmbkpkSnW2h6N5TCwVXsJmaKaHVEzRTIrMtnGg2zSiwkloorim1UFj31EJRPVALBfVhXn0dhiX43uC6/KLOqOzqoosIFVtdahGhEqsLLCJUWHVZRYTKqS6miFAR1SUUESqdunAiQgVTl0tEqEzqIokIFUddGhGhkqgLIiJUCHUZRITKny5+iFDR0yUPESp1utAhQgVOlzdEqKzpooYIFTNdyhChEqYLGCJUuHTZQoTKlS5WiFCR0iUKESpNujAhQgVJlyNEqAzpIoTILVtBqgsDXhaS7rjaiPt4xGbPpr5iOlX614NjBejcFiBUUQ9Sob5H3oYg9gtAUY031A6EVzQ+UIwi9RQV0iAbRmmIwfxJrBAxqo+T+UyoB8DnIB8LMMji4feFGdzPMQmbD3FTob8+NCW1iqcfYFdDk8Z6poKpX25ajPQvtyxGGSC3LUY5IHcsRlkgdy1GeSD3LEaZIPctRrkgDyxG2SBfWYzyQR5ajDJCdixGOSGPLEZZIY8tRnkhTyxGmSG7FqPckKcWo+yQZxaj/JDnFqMMkT2LUY7IC4tRlshLi1GeyCuLUabIa4tRrsgbi1G2yFuLGbOGQt4r/Hxs2NB+BA6cTyLhJoNJF+EWg0ka4TaDSR3hDoNJIOEug0kj4R6DSSbhPoNJKeEBg0ks4SsGk17CQwaTZMIOg0k14RGDSTjhMYNJO+EJg0k+YZfBpKDwlMEkovCMwaSj8JzBJKWwx2BSU3jBYBJUeMlg0lR4xWCSVXjNYFJWeMNgEld4y2D7YQC3tsqqifoBy4CJS2wSStoSW4SStMQ2oVpZT71t/SXHRIDnewKkh5eOYejtrHoDCHyFy3EkvGk2iYcIYQs8ob8SQS85KTz14k8WYyD1Kgzc5+gt9fe89tv2XboiqVPsEUriFPuEkjbFAaEkTfGKUFKmOCSUhCk6hJIuxRGhJEtxTCipUpwQSqIUXUJJk+KUUJKkOCOUFCnOCSVBih6hpEdxQSjJUVwSSmoUV4SSGMU1oaRFcUMoSVHcElo/jUnR94H+COGb5zCVCQRyAB3X/Ct7uEEtlOomtVCiW9RCaW5TCze7HWqhiHapheLZoxaKZp9aKJYDaqFIXlELxXFILRRFh1oohiNqoQiOqYWLf0ItXPQutXCxT6mFi3xGLVzcc2rhovaohYt5QS1cxEtq4eJdUQsX7ZpauFg31MJFumXXq5xW5bLUkgFfMmkcF24pKn/1u3yYxAZd9aaRHGcT6aHd8aZY0nIoXEME5IgcN1RdXtYa0B0XjCBouwQNvwTaMEHDMYG2TNDwTKBNEzRcE2jbBA3fBNo4QcM5gbZO0PBOoM0TNNwTaPsEDf8E2kBBw0GBtlDQ8FCgTRQ0XBRoGwUNHwXaSEHDSYG2UtDwUqDNFDTcFGg7BQ0/BdpQQcNRgbZU0PBUoE0VNFwVaFsFDV8F2lhBw1mBtlbQ8FagzRU03BVoewUNfwXaYAFzWPhJAUuOLCbgTdIhFPGDep9p6EvfCyGFAquNakcClT6YqNLjyjZXXeez/O2sXyQz3dCFT0WFJI+KCEuec379WuHgQZc7/YaIugjWx0Zs+/LI2Jf4Sd29hNOzy3t25203k2RDiD82EN2hHolpLVyn6tT9WKdcRvEQqp593ajvvj4DtwmZBWNfqNdu/YnM9CcoKJw7bLzbmps+9T1WpyzewBCcfqbZ0q9AAjcd2880UQuBfobmdo79PPYDmNcv23QqYO499apjd3rd83fmdcXbad5IR7D3eTpN9mzOa3tj10xyNscNMi7m9rmbSxQQzusnaU0qkDRG1YpGERTN0CIbycS/p54WaPbDYpHp95vMQ7bFKHk8UaP/oJ4EuOxhZ85fbjrsLCzgpV/QHahGM77EX36Ba19krOf5wgJsZSXRqqEEepXFo8JP1AOp8TQr0KAK/0F4TzrfvXiiXuzRr6xPUvOCqshx/YV+sexJH+KY9bEPRJ96m1gAMeVT9d8D5jsk6gU35YJNUNZbvV2aTUJdM7UpjiSs6vAi84YZqHDT6C7KYRj5a423k7MiidVz/fms893zeQuZpaC49TZOTvV5L9q4XDF5C6O10PmuH6Uj+dBMndwv1MNh3DZ8lSzngHut8EPwotRLs8rQS7hf87bGmVDTkykDGIy9bfzsm8JXwhtk2d3asvM45yRXu3NW/B41XoT6BvB3f1Udfayj2idNRzxqD6nVit30/4/06KGgeurlvxhk3x9gnsXZdFCAf7es/4Diz+rnD/WfSyweXL5YW3+59s3pNyvfblZ/SvHZ0m+Wfrv09dL60h+Xvl3aX+ouXSwFS7D016W/Lf19/R/r/1z/1/q/TddPP6nO+fWS87P+3/8B+KVnZA== Y j | v j q AAAyLniclVvZctvIFdVknSiZZCZ5zAsqsmsmKVll2a4sb6N9oyRqX0zbBYKXICxsRjdByQzzF3lNfiFfk6o8pPKaz8jtbjTubRDyVFRlC31O4wLdfW7fQxDq53Ek5PPn//rse9//wQ9/9OPPf7L405998fNffPnVLy9FNi4CuAiyOCuu+76AOErhQkYyhuu8AD/px3DVv9tQ/FUJhYiy9Fw+5PAm8cM0GkaBLxF6ffP2/Z97Zfnuw9v3775cer7yXP948wer1cHSQvXTfffV6he9QRaME0hlEPtCvF59nss3U7+QURDDbLE3FpD7wZ0fwms8TP0ExJupvueZ9xSRgTfMCvyXSk+j/IypnwjxkPSxZ+LLkWhyCmzjXo/l8I9vplGajyWkgbnQcBx7MvPUBHiDqIBAxg944AdFhPfqBSO/8AOJ0+RcpZ84Y5jKCAcwW1x8qn68o60r73DtfNfb3NreO9o73zs+OvM0tdh2r8v4W41ULKuwi0+9Q7+48wTeCq6D8LKhF/i5OVaTUsAQiiJKQ3Xfg6iMhO02jMJxAXinKUyCLEn8dDDtIRjDUM6m0x4k3jcdPP7tbDbXJ8ClgsL22tCttn5FFI7qYKeq0dZLZrntc57lbT36mZRZYjut69Zcv2rcvu3mP9ajb3v0H+sR2B7BYz0GtsdA9cBl2MXRxWqEnu9hf6ULGGIyDTycm8SNgccKnL1efYNR+kNvaVUFwSjbelHMqqHqYNmLswkUzwJMzZXFHobU0wrDpdWpWcC/9LA11QHaTsfbjaQfr3jbKAYhMafU2gu1YsibiNs24nYzoqblJLPXXHpRXVV4tpOHI6oaL+wZH8b+gE5Zern0au605foce/SSh3qlh3NmVP3J6UDlm5uvUsCZj5YAdkLM2Wf27LOWs0/tWTrnJ1mdZSv1xJirCz0zdQ4+MjXNgKMCoBmSxVt6OR+RZo3Ffjkf2089wEVQJ7dMGXwwY7ZdHh+0E2ec51B4Ko4Js1WF2WoLs+YV/oTmvRHs2bNnfplFA28s1NYUDb08EyLCYmNC57GPqVPFf/zu1IabYya1jFEx5vSqz/89yCrQRh1o4zsD4ZjTEPQebPoKE0PD9R2hVCxtQz179qhM8O78OMywwIySlnEiZ+6u7vTJgbJQcyNds6HWWkJZwdvr4SDqWJ/eDM6dk9a+86S5Sc1x06pGztSnUHO76uhTi2LOb6q3W5/fdc+3I60vgHetjh+94UpwEMVKrLE6wA0dO6ijKt4wzrJC0/rI8Pqw6oBUP5muNquNLDARZtOeqvyBH083mx1KP44GvMM7c1wkU0PN5kKCkO0naGZWjwhyoWpcLqI4S6v6dIohssQr/SLyMVutvkH6UxX5XqZZkWDUJz2EnszsdBYN2iem7zJ9YgKXCYgZuMyAGHAZIGboMkNiQpcJiRm5zIiYyGUiYt67zHti7lzmjpjYZeKZlnGReJHAjEUbPnhQm51ZwWXv/VhIb5ClX0tPeWGU44PaeZyF8ZIqdurGTumqmctkxOQukxPzwWU+EFO4TEGMcBlBjHQZSczYZcbElC5TEjNxmQkx9y5zT8yDyzwQ89FlPs6MzbMJgJU5q7f3skqSqUml/pClTX3fcmSyxPbQbcYzjsN9gllulAHBLDHKAcEsK0ogmKVEOSSY5UMZEsySoRwRzDKhHBPM0qB8TzDLgfKOYJYAZUxwzOCE4ITBbKL5DGcEMzGXOcFMyeUHgpmMy4JgpuFSECz4ohIs2+eES7ckmOm2nBDMRFveE8wUWz4QzORafiTYanUrBvWZWn/aK1p0C0Z0rfsyGOW17sxg5Ne6N4PRYOvuDEaIrfszGDW27tBgJNm6R4PRZesujdyj+zQYhbbu1GBk2rpXg9Fqc7e2XOJyCece3YnBSLd1Lwaj39bdGIyIW/djMEpu3ZHByLl1Twaj6dZdGYywW/dlMOpu3ZnBSLx1bwaj89bdGYzYW/dnMIp/fIfGXCiioHYoyRrlxxqlTbJO8DqDNwjeYPAmwZsM3iJ4i8HbBG8zeIfgHQbvErzL4D2C9xi8T/A+gw8IPmBwh+AOgw8JPmTwEcFHDD4m+JjBXYK7DD4h+ITBpwSfMviM4DMGnxN8zuALgi8YfEnwJYOvCL5i8DXB1wy+IfiGwbcE3z6+vbqiA6M6ptE1pl8tPcatc27D5TY4t+lym5zbcrktzm273Dbndlxuh3O7LrfLuT2X2+Pcvsvtc+7A5Q4413G5DucOXe6Qc0cud8S5Y5c75lzX5bqcO3G5E86dutwp585c7oxz5y53zrkLl7vg3KXLXXLuyuWuOHftctecu3G5G87dupyV/SW3EOVH0J8j8LPr8/rcMkthaj/PWiwZG6iXUNEoRRQmfoXrY6KsXVaUa5XLCmZI3yBkUbRBQYSMibYliJAdKaubJBOiLQgiZD208UCEDIe2G4iQzdAmAxEyF9paIEKWQhsKRMhIaBuBSMymyCBkGrRlQCRlU2sQMgjaHiBCtkCbAkTIDGgrgEjBZt4ggk24Qajcl9WKsfUqDUKlXRd2RKig63KOCJVxXcQRoeKtSzcibUbVdailH+cjtd76dy3Osl+JQ+vCgvQpjB5aVFTsJ/2BOsMcEJElECpc/yZYq1Up1QIYEBH8nyAr3kq4FrbCrURbD2Q65fc/VWK1LRRrQC0U6oANaqoEalso0CG1UJwhtVCYI2rh7bJ7RUG+pxaK8Y7NzVSJsB75VAnQtnAy2Syi+DI2JVMlOttC0X2gFgquYDM1VUKrJ2iqRGZbONFsmlFgJbVQXBNqobDuqYWieqAWCurjrPo6DEvwvcF1+UWdUdnVRRcRKra61CJCJVYXWESosOqyigiVU11MEaEiqksoIlQ6deFEhAqmLpeIUJnURRIRKo66NCJCJVEXRESoEOoyiAiVP138EKGip0seIlTqdKFDhAqcLm+IUFnTRQ0RKma6lCFCJUwXMESocOmyhQiVK12sEKEipUsUIlSadGFChAqSLkeIUBnSRQiRW7aCVBf6vCwk3VG1EffwiM2eTX3FdKr0rwfHCtCZLUCoonNIhfoeeROC2C8ARTVaUzsQXtH4QDGM1FNUSINsEKUhBvPHsULEsD5OZlOhHgCfgXwsQD+LB98Vpn8/wyRsPsRNhf760JTUKp5+gF0NTRrrmQqmfrluMdK/3LAYZYDctBjlgNyyGGWB3LYY5YHcsRhlgty1GOWC3LMYZYPctxjlgzywGGWE7FiMckIeWoyyQh5ZjPJCHluMMkN2LUa5IU8sRtkhTy1G+SHPLEYZIs8tRjkiLyxGWSIvLUZ5Iq8sRpkiry1GuSJvLEbZIm8tZswaCnmn8PORYUP7EThwPomE6wwmXYQbDCZphJsMJnWEWwwmgYTbDCaNhDsMJpmEuwwmpYR7DCaxhPsMJr2EBwwmyYQdBpNqwkMGk3DCIwaTdsJjBpN8wi6DSUHhCYNJROEpg0lH4RmDSUrhOYNJTeEFg0lQ4SWDSVPhFYNJVuE1g0lZ4Q2DSVzhLYPthwHc2iqrJuoHLH0mLrFOKGlLbBBK0hKbhGplPfU29ZccYwGe7wmQHl46hoG3tez1IfAVLkeR8CbZOB4ghC3whP5KBL3kuPDUiz9ZjIHUqzBwn6O31N/z2m/bt+mKpE6xQyiJU+wSStoUe4SSNMU+oaRMcUAoCVN0CCVdikNCSZbiiFBSpTgmlEQpuoSSJsUJoSRJcUooKVKcEUqCFOeEkh7FBaEkR3FJKKlRXBFKYhTXhJIWxQ2hJEVxS2j9NCZF3wf6I4RvnsNUJhDIAXRc86/s4Rq1UKrr1EKJblALpblJLdzstqiFItqmFopnh1ooml1qoVj2qIUi2acWiuOAWiiKDrVQDIfUQhEcUQsX/5hauOhdauFin1ALF/mUWri4Z9TCRT2nFi7mBbVwES+phYt3RS1ctGtq4WLdUAsX6ZZdr3JalctSSwZ8yaRxXLilqPzV7/JhEht02ZtEcpSNpYd2x5tgScuhcA0RkCNy3FB1eVlrQHecM4Kg7RI0/BJowwQNxwTaMkHDM4E2TdBwTaBtEzR8E2jjBA3nBNo6QcM7gTZP0HBPoO0TNPwTaAMFDQcF2kJBw0OBNlHQcFGgbRQ0fBRoIwUNJwXaSkHDS4E2U9BwU6DtFDT8FGhDBQ1HBdpSQcNTgTZV0HBVoG0VNHwVaGMFDWcF2lpBw1uBNlfQcFeg7RU0/BVogwXMYeEnBSw5shiDN04HUMQP6n2mgS99L4QUCqw2qh0JVHp/rEqPK9tcdZ1N83fTXpFMdUMXPhUVkjwqIix5zvn1a4X9B13u9Bsi6iJYHxux7csjI1/iJ3X3Ek7PLu/ZnbXdTJINIP7UQHSHeiSmNXedqlP3U51yGcUDqHr2dKO++/oM3CZkFox8oV679ccy05+goHDusPFua2761PdYnTJ/AwNw+plmS78CCdx0bD/TRC0E+hma2zn289gPYFa/bNOpgJn31KuO3el1z9+a1RVvq3kjHcHe5+k02dMZr+2NXTPJ2Rw3yLiY2eduLlFAOKufpDWpQNIYVSsaRlA0Q4tsKBP/nnpaoNkPi0Wm328yD9nmo+TxWI3+o3oS4LIHnRl/uemgM7eAl35Bd6AazfgSf/kFrn2RsZ5ncwuwkZVEq4YS6FUWDws/UQ+kRpOsQIMq/AfhPem8ffFEvdijX1kfp+YFVZHj+gv9YtmTHsQx62MfiD711rEAYsqn6r8HzHdI1AtuygWboKy3ers0G4e6ZmpTHElY1uFF5g0yUOEm0V2UwyDyVxpvJ2dFEqvn+rNp5+3zWQuZpaC41TZOTvR5L9q4XDF5C6O10Hnbi9KhfGimTu4X6uEwbhu+SpYzwL1W+CF4UeqlWWXoJdyveBujTKjpyZQBDEbeJn72TeFr4fWz7G5l0Xmcc5yr3TkrfocaL0J9A/i7t6yOPtVR7ZOmIx61h9RqxW76/0d6nKOgztXLfzHInt/HPIuzSb8A/25R/wHFn9TP7+s/l5g/uHyxsvpy5dXJq6Vv16s/pfh84dcLv1n4ZmF14Q8L3y7sLnQXLhaChWzhrwt/W/j76j9W/7n679X/mK7f+6w651cLzs/qf/8HJmFr+g== c om p u t e m e a n a n d v a r i a n c e f j k AAAyKniclVvZctvIFdVMtomSSWaSx7ygIrtmkpJVlu3K8jbaN2qnVtN2geAlCAub0U1QMov5h7wmv5CvydtUXvMhud2Nxr0NQp6Kqmyhz2lcoLvP7XsIQv08joR8/vz7zz7/0Y9/8tOfffHzxV/88stf/fqrr39zKbJxEcBFkMVZcd33BcRRChcykjFc5wX4ST+Gq/7dhuKvSihElKVd+ZDDm8QP02gYBb5E6KpXDt/dvX3/7qul5yvP9Y83f7BaHSwtVD8n775e/bI3yIJxAqkMYl+I16vPc/lm6hcyCmKYLfbGAnI/uPNDeI2HqZ+AeDPV9zvzniIy8IZZgf9S6WmUnzH1EyEekj72THw5Ek1OgW3c67Ec/uXNNErzsYQ0MBcajmNPZp4avDeICghk/IAHflBEeK9eMPILP5A4Rc5V+okzhqmMcACzxcWn6sc72rryDte6u97m1vbe0V537/jo3NPUYtu9LuNvNVKxrMIuPvUO/eLOE3gruAbCy4Ze4OfmWE1KAUMoiigN1X0PojISttswCscF4J2mMAmyJPHTwbSHYAxDOZtOe5B433bw+A+z2VyfAJcKCttrQ7fa+hVROKqDnalGWy+Z5bZPN8vbevQzKbPEdlrXrbl+1bh9281/rEff9ug/1iOwPYLHegxsj4Hqgcuwi6OL1Qg938P+ShcwxEQaeDg3iRsDjxU4e736BqP0h97SqgqCUbb1ophVQ9XBshdnEyieBZiWK4s9DKmnFYZLq1OzgH/rYWuqA7SdjrcbST9e8bZRDEJiTqm1F2rFkDcRt23E7WZETctJZq+59KK6qvBsJw9HVDVe2DM+jP0BnbL0cunV3GnL9Tn26CUP9UoP59yo+pPTgco3N1+lgDMfLQHshJizz+3Z5y1nn9mzdM5PsjrLVuqJMVcXembqHHxkapoBRwVAMySLt/RyPiLNGov9cj62n3qAi6BObpky+GDGbLs8PmgnzjjPofBUHBNmqwqz1RZmzSv8Cc17I9izZ8/8MosG3liorSkaenkmRISFxoTOYx9Tp4r/+N2pDTfHTGoZo2LM6VWf/3uQVaCNOtDGDwbCMach6D3Y9BUmhobrO0KpWNqGevbsUZng3flxmGGBGSUt40TO3F3d6ZMDZaHmRrpmQ621hLKCt9fDQdSxPr0ZdJ2T1n7wpLlJzXHTqkbO1KdQc7vq6FOLYs5vqvekPv/EPd+OtL4A3rU6fvSGK8FBFCuxxuoAN3TsoI6qeMM4ywpN6yPD68OqA1L9ZLrarDaywESYTXuq8gd+PN1sdij9OBrwDu/McZFMDTWbCwlCtp+gmVk9IsiFqnG5iOIsrerTGYbIEq/0i8jHbLX6BulPVeR7mWZFglGf9BB6MrPTWTRon5i+y/SJCVwmIGbgMgNiwGWAmKHLDIkJXSYkZuQyI2Iil4mIee8y74m5c5k7YmKXiWdaxkXiRQIzFi344EFtdmYFl733YyG9QZZ+Iz3lhVGOD2rncRbGS6rYqRs7patmLpMRk7tMTswHl/lATOEyBTHCZQQx0mUkMWOXGRNTukxJzMRlJsTcu8w9MQ8u80DMR5f5ODM2zyYAVuas3t7LKkmmJpX6Q5Y29X3LkckS20O3Gc84DvcJZrlRBgSzxCgHBLOsKIFglhLlkGCWD2VIMEuGckQwy4RyTDBLg/I9wSwHyjuCWQKUMcExgxOCEwazieYznBHMxFzmBDMllx8IZjIuC4KZhktBsOCLSrBsnxMu3ZJgpttyQjATbXlPMFNs+UAwk2v5kWCr1a0Y1Gdq/WmvaNEtGNG17stglNe6M4ORX+veDEaDrbszGCG27s9g1Ni6Q4ORZOseDUaXrbs0co/u02AU2rpTg5Fp614NRqvN3dpyicslnHt0JwYj3da9GIx+W3djMCJu3Y/BKLl1RwYj59Y9GYymW3dlMMJu3ZfBqLt1ZwYj8da9GYzOW3dnMGJv3Z/BKP7xHRpzoYiC2qEka5Qfa5Q2yTrB6wzeIHiDwZsEbzJ4i+AtBm8TvM3gHYJ3GLxL8C6D9wjeY/A+wfsMPiD4gMEdgjsMPiT4kMFHBB8x+JjgYwafEHzC4FOCTxl8RvAZg88JPmdwl+Augy8IvmDwJcGXDL4i+IrB1wRfM/iG4BsG3xJ8+/j26ooOjOqYRteYfrX0GLfOuQ2X2+Dcpsttcm7L5bY4t+1y25zbcbkdzu263C7n9lxuj3P7LrfPuQOXO+Bcx+U6nDt0uUPOHbncEeeOXe6Ycycud8K5U5c75dyZy51x7tzlzjnXdbku5y5c7oJzly53ybkrl7vi3LXLXXPuxuVuOHfrclb2l9xClB9Bf47Az67P63PLLIWp/TxrsWRsoF5CRaMUUZj4Fa6PibJ2WVGuVS4rmCF9g5BF0QYFETIm2pYgQnakrG6STIi2IIiQ9dDGAxEyHNpuIEI2Q5sMRMhcaGuBCFkKbSgQISOhbQQiMZsig5Bp0JYBkZRNrUHIIGh7gAjZAm0KECEzoK0AIgWbeYMINuEGoXJfVivG1qs0CJV2XdgRoYKuyzkiVMZ1EUeEircu3Yi0GVXXoZZ+nI/UeuvftTjLfiUOrQsL0qcwemhRUbGf9AfqDHNARJZAqHD9m2CtVqVUC2BARPB/gqx4K+Fa2Aq3Em09kOmU3/9UidW2UKwBtVCoAzaoqRKobaFAh9RCcYbUQmGOqIW3y+4VBfmeWijGOzY3UyXCeuRTJUDbwslks4jiy9iUTJXobAtF94FaKLiCzdRUCa2eoKkSmW3hRLNpRoGV1EJxTaiFwrqnForqgVooqI+z6uswLMH3BtflF3VGZVcXXUSo2OpSiwiVWF1gEaHCqssqIlROdTFFhIqoLqGIUOnUhRMRKpi6XCJCZVIXSUSoOOrSiAiVRF0QEaFCqMsgIlT+dPFDhIqeLnmIUKnThQ4RKnC6vCFCZU0XNUSomOlShgiVMF3AEKHCpcsWIlSudLFChIqULlGIUGnShQkRKki6HCFCZUgXIURu2QpSXejzspCcjKqNuIdHbPZs6iumU6V/PThWgM5tAUIVdSEV6nvkTQhivwAU1WhN7UB4ReMDxTBST1EhDbJBlIYYzB/HChHD+jiZTYV6AHwO8rEA/Swe/FCY/v0Mk7D5EDcV+utDU1KrePoBdjU0aaxnKpj65brFSP9yw2KUAXLTYpQDcstilAVy22KUB3LHYpQJctdilAtyz2KUDXLfYpQP8sBilBGyYzHKCXloMcoKeWQxygt5bDHKDHliMcoNeWoxyg55ZjHKD3luMcoQ2bUY5Yi8sBhliby0GOWJvLIYZYq8thjliryxGGWLvLWYMWso5J3Cz0eGDe1H4MD5JBKuM5h0EW4wmKQRbjKY1BFuMZgEEm4zmDQS7jCYZBLuMpiUEu4xmMQS7jOY9BIeMJgkE3YYTKoJDxlMwgmPGEzaCY8ZTPIJTxhMCgpPGUwiCs8YTDoKzxlMUgq7DCY1hRcMJkGFlwwmTYVXDCZZhdcMJmWFNwwmcYW3DLYfBnBrq6yaqB+w9Jm4xDqhpC2xQShJS2wSqpX11NvUX3KMBXi+J0B6eOkYBt7WsteHwFe4HEXCm2TjeIAQtsAT+isR9JLjwlMv/mQxBlKvwsB9jt5Sf89rv23fpiuSOsUOoSROsUsoaVPsEUrSFPuEkjLFAaEkTNEhlHQpDgklWYojQkmV4phQEqU4IZQ0KU4JJUmKM0JJkeKcUBKk6BJKehQXhJIcxSWhpEZxRSiJUVwTSloUN4SSFMUtofXTmBR9H+iPEL55DlOZQCAH0HHNv7KHa9RCqa5TCyW6QS2U5ia1cLPbohaKaJtaKJ4daqFodqmFYtmjFopkn1oojgNqoSg61EIxHFILRXBELVz8Y2rhop9QCxf7lFq4yGfUwsU9pxYuapdauJgX1MJFvKQWLt4VtXDRrqmFi3VDLVykW3a9ymlVLkstGfAlk8Zx4Zai8le/y4dJbNBlbxLJUTaWHtodb4IlLYfCNURAjshxQ9XlZa0B3XHOCIK2S9DwS6ANEzQcE2jLBA3PBNo0QcM1gbZN0PBNoI0TNJwTaOsEDe8E2jxBwz2Btk/Q8E+gDRQ0HBRoCwUNDwXaREHDRYG2UdDwUaCNFDScFGgrBQ0vBdpMQcNNgbZT0PBToA0VNBwVaEsFDU8F2lRBw1WBtlXQ8FWgjRU0nBVoawUNbwXaXEHDXYG2V9DwV6ANFjCHhZ8UsOTIYgzeOB1AET+o95kGvvS9EFIosNqodiRQ6f2xKj2ubHPVdTbN3017RTLVDV34VFRI8qiIsOQ559evFfYfdLnTb4ioi2B9bMS2L4+MfImf1N1LOD1PeM+TWdvNJNkA4k8NRHeoR2Jac9epOp18qlMuo3gAVc+ebtR3X5+B24TMgpEv1Gu3/lhm+hMUFM4dNt5tzU2f+h6rU+ZvYABOP9Ns6VcggZuO7WeaqIVAP0NzO8d+HvsBzOqXbToVMPOeetWxO73u+VuzuuJtNW+kI9j7PJ0mezbjtb2xayY5m+MGGRcz+9zNJQoIZ/WTtCYVSBqjakXDCIpmaJENZeLfU08LNPthscj0+03mIdt8lDweq9F/VE8CXPagM+MvNx105hbw0i/oDlSjGV/iL7/AtS8y1vN8bgE2spJo1VACvcriYeEn6oHUaJIVaFCF/yC8J523L56oF3v0K+vj1LygKnJcf6FfLHvSgzhmfewD0afeOhZATPlU/feA+Q6JesFNuWATlPVWb5dm41DXTG2KIwnLOrzIvEEGKtwkuotyGET+SuPt5KxIYvVcfzbtvH0+ayGzFBS32sbJiT7vRRuXKyZvYbQWOm97UTqUD83Uyf1CPRzGbcNXyXIOuNcKPwQvSr00qwy9hPsVb2OUCTU9mTKAwcjbxM++KXwjvH6W3a0sOo9zjnO1O2fFH1HjRahvAH/3ltXRpzqqfdJ0xKP2kFqt2E3//0iPLgqqq17+i0H2/D7mWZxN+gX4d4v6Dyj+qn7+VP+5xPzB5YuV1Zcrr05fLX23Xv0pxRcLv1v4/cK3C6sLf174bmF34WThYiFYuFv4+8I/Fv65+q/Vf69+v/of0/Xzz6pzfrvg/Kz+9381k2of z j k AAAyMHiclVvZctvIFdVMtomSSWaSx7ygIrtmkpJVlu3K8jbaN2qnVtN2geAlCAub0U1QMov5jbwmv5CvSZ5Sec1X5HY3Gvc2CHkqqrKFPqdxge4+t+8hCPXzOBLy+fN/ffb5D374ox//5IufLv7s51/+4pdfff2rS5GNiwAugizOiuu+LyCOUriQkYzhOi/AT/oxXPXvNhR/VUIhoiztyocc3iR+mEbDKPAlQm96mxBLv1d+fHf39v27r5aerzzXP978wWp1sLRQ/Zy8+3r1y94gC8YJpDKIfSFerz7P5ZupX8goiGG22BsLyP3gzg/hNR6mfgLizVTf9cx7isjAG2YF/kulp1F+xtRPhHhI+tgz8eVINDkFtnGvx3L4pzfTKM3HEtLAXGg4jj2ZeWoKvEFUQCDjBzzwgyLCe/WCkV/4gcSJcq7ST5wxTGWEA5gtLj5VP97R1pV3uNbd9Ta3tveO9rp7x0fnnqYW2+51GX+rkYplFXbxqXfoF3eewFvBlRBeNvQCPzfHalIKGEJRRGmo7nsQlZGw3YZROC4A7zSFSZAliZ8Opj0EYxjK2XTag8T7toPHv5vN5voEuFRQ2F4butXWr4jCUR3sTDXaeskst326Wd7Wo59JmSW207puzfWrxu3bbv5jPfq2R/+xHoHtETzWY2B7DFQPXIZdHF2sRuj5HvZXuoAhptPAw7lJ3Bh4rMDZ69U3GKU/9JZWVRCMsq0Xxawaqg6WvTibQPEswORcWexhSD2tMFxanZoF/EsPW1MdoO10vN1I+vGKt41iEBJzSq29UCuGvIm4bSNuNyNqWk4ye82lF9VVhWc7eTiiqvHCnvFh7A/olKWXS6/mTluuz7FHL3moV3o450bVn5wOVL65+SoFnPloCWAnxJx9bs8+bzn7zJ6lc36S1Vm2Uk+MubrQM1Pn4CNT0ww4KgCaIVm8pZfzEWnWWOyX87H91ANcBHVyy5TBBzNm2+XxQTtxxnkOhafimDBbVZittjBrXuFPaN4bwZ49e+aXWTTwxkJtTdHQyzMhIiw3JnQe+5g6VfzH705tuDlmUssYFWNOr/r834OsAm3UgTa+NxCOOQ1B78GmrzAxNFzfEUrF0jbUs2ePygTvzo/DDAvMKGkZJ3Lm7upOnxwoCzU30jUbaq0llBW8vR4Ooo716c2g65y09r0nzU1qjptWNXKmPoWa21VHn1oUc35TvSf1+Sfu+Xak9QXwrtXxozdcCQ6iWIk1Vge4oWMHdVTFG8ZZVmhaHxleH1YdkOon09VmtZEFJsJs2lOVP/Dj6WazQ+nH0YB3eGeOi2RqqNlcSBCy/QTNzOoRQS5UjctFFGdpVZ/OMESWeKVfRD5mq9U3SH+qIt/LNCsSjPqkh9CTmZ3OokH7xPRdpk9M4DIBMQOXGRADLgPEDF1mSEzoMiExI5cZERO5TETMe5d5T8ydy9wRE7tMPNMyLhIvEpixaMQHD2qzMyu47L0fC+kNsvQb6SkvjHJ8UDuPszBeUsVO3dgpXTVzmYyY3GVyYj64zAdiCpcpiBEuI4iRLiOJGbvMmJjSZUpiJi4zIebeZe6JeXCZB2I+uszHmbF5NgGwMmf19l5WSTI1qdQfsrSp71uOTJbYHrrNeMZxuE8wy40yIJglRjkgmGVFCQSzlCiHBLN8KEOCWTKUI4JZJpRjglkalO8JZjlQ3hHMEqCMCY4ZnBCcMJhNNJ/hjGAm5jInmCm5/EAwk3FZEMw0XAqCBV9UgmX7nHDplgQz3ZYTgploy3uCmWLLB4KZXMuPBFutbsWgPlPrT3tFi27BiK51XwajvNadGYz8WvdmMBps3Z3BCLF1fwajxtYdGowkW/doMLps3aWRe3SfBqPQ1p0ajExb92owWm3u1pZLXC7h3KM7MRjptu7FYPTbuhuDEXHrfgxGya07Mhg5t+7JYDTduiuDEXbrvgxG3a07MxiJt+7NYHTeujuDEXvr/gxG8Y/v0JgLRRTUDiVZo/xYo7RJ1gleZ/AGwRsM3iR4k8FbBG8xeJvgbQbvELzD4F2Cdxm8R/Aeg/cJ3mfwAcEHDO4Q3GHwIcGHDD4i+IjBxwQfM/iE4BMGnxJ8yuAzgs8YfE7wOYO7BHcZfEHwBYMvCb5k8BXBVwy+JviawTcE3zD4luDbx7dXV3RgVMc0usb0q6XHuHXObbjcBuc2XW6Tc1sut8W5bZfb5tyOy+1wbtfldjm353J7nNt3uX3OHbjcAec6Ltfh3KHLHXLuyOWOOHfscsecO3G5E86dutwp585c7oxz5y53zrmuy3U5d+FyF5y7dLlLzl253BXnrl3umnM3LnfDuVuXs7K/5Bai/Aj6cwR+dn1en1tmKUzt51mLJWMD9RIqGqWIwsSvcH1MlLXLinKtclnBDOkbhCyKNiiIkDHRtgQRsiNldZNkQrQFQYSshzYeiJDh0HYDEbIZ2mQgQuZCWwtEyFJoQ4EIGQltIxCJ2RQZhEyDtgyIpGxqDUIGQdsDRMgWaFOACJkBbQUQKdjMG0SwCTcIlfuyWjG2XqVBqLTrwo4IFXRdzhGhMq6LOCJUvHXpRqTNqLoOtfTjfKTWW/+uxVn2K3FoXViQPoXRQ4uKiv2kP1BnmAMisgRChevfBGu1KqVaAAMigv8TZMVbCdfCVriVaOuBTKf8/qdKrLaFYg2ohUIdsEFNlUBtCwU6pBaKM6QWCnNELbxddq8oyPfUQjHesbmZKhHWI58qAdoWTiabRRRfxqZkqkRnWyi6D9RCwRVspqZKaPUETZXIbAsnmk0zCqykFoprQi0U1j21UFQP1EJBfZxVX4dhCb43uC6/qDMqu7roIkLFVpdaRKjE6gKLCBVWXVYRoXKqiykiVER1CUWESqcunIhQwdTlEhEqk7pIIkLFUZdGRKgk6oKICBVCXQYRofKnix8iVPR0yUOESp0udIhQgdPlDREqa7qoIULFTJcyRKiE6QKGCBUuXbYQoXKlixUiVKR0iUKESpMuTIhQQdLlCBEqQ7oIIXLLVpDqQp+XheRkVG3EPTxis2dTXzGdKv3rwbECdG4LEKqoC6lQ3yNvQhD7BaCoRmtqB8IrGh8ohpF6igppkA2iNMRg/jhWiBjWx8lsKtQD4HOQjwXoZ/Hg+8L072eYhM2HuKnQXx+aklrF0w+wq6FJYz1TwdQv1y1G+pcbFqMMkJsWoxyQWxajLJDbFqM8kDsWo0yQuxajXJB7FqNskPsWo3yQBxajjJAdi1FOyEOLUVbII4tRXshji1FmyBOLUW7IU4tRdsgzi1F+yHOLUYbIrsUoR+SFxShL5KXFKE/klcUoU+S1xShX5I3FKFvkrcWMWUMh7xR+PjJsaD8CB84nkXCdwaSLcIPBJI1wk8GkjnCLwSSQcJvBpJFwh8Ekk3CXwaSUcI/BJJZwn8Gkl/CAwSSZsMNgUk14yGASTnjEYNJOeMxgkk94wmBSUHjKYBJReMZg0lF4zmCSUthlMKkpvGAwCSq8ZDBpKrxiMMkqvGYwKSu8YTCJK7xlsP0wgFtbZdVE/YClz8Ql1gklbYkNQklaYpNQrayn3qb+kmMswPM9AdLDS8cw8LaWvT4EvsLlKBLeJBvHA4SwBZ7QX4mglxwXnnrxJ4sxkHoVBu5z9Jb6e177bfs2XZHUKXYIJXGKXUJJm2KPUJKm2CeUlCkOCCVhig6hpEtxSCjJUhwRSqoUx4SSKMUJoaRJcUooSVKcEUqKFOeEkiBFl1DSo7gglOQoLgklNYorQkmM4ppQ0qK4IZSkKG4JrZ/GpOj7QH+E8M1zmMoEAjmAjmv+lT1coxZKdZ1aKNENaqE0N6mFm90WtVBE29RC8exQC0WzSy0Uyx61UCT71EJxHFALRdGhForhkFoogiNq4eIfUwsX/YRauNin1MJFPqMWLu45tXBRu9TCxbygFi7iJbVw8a6ohYt2TS1crBtq4SLdsutVTqtyWWrJgC+ZNI4LtxSVv/pdPkxigy57k0iOsrH00O54EyxpORSuIQJyRI4bqi4vaw3ojnNGELRdgoZfAm2YoOGYQFsmaHgm0KYJGq4JtG2Chm8CbZyg4ZxAWydoeCfQ5gka7gm0fYKGfwJtoKDhoEBbKGh4KNAmChouCrSNgoaPAm2koOGkQFspaHgp0GYKGm4KtJ2Chp8Cbaig4ahAWypoeCrQpgoargq0rYKGrwJtrKDhrEBbK2h4K9DmChruCrS9goa/Am2wgDks/KSAJUcWY/DG6QCK+EG9zzTwpe+FkEKB1Ua1I4FK749V6XFlm6uus2n+btorkqlu6MKnokKSR0WEJc85v36tsP+gy51+Q0RdBOtjI7Z9eWTkS/yk7l7C6XnCe57M2m4myQYQf2ogukM9EtOau07V6eRTnXIZxQOoevZ0o777+gzcJmQWjHyhXrv1xzLTn6CgcO6w8W5rbvrU91idMn8DA3D6mWZLvwIJ3HRsP9NELQT6GZrbOfbz2A9gVr9s06mAmffUq47d6XXP35rVFW+reSMdwd7n6TTZsxmv7Y1dM8nZHDfIuJjZ524uUUA4q5+kNalA0hhVKxpGUDRDi2woE/+eelqg2Q+LRabfbzIP2eaj5PFYjf6jehLgsgedGX+56aAzt4CXfkF3oBrN+BJ/+QWufZGxnudzC7CRlUSrhhLoVRYPCz9RD6RGk6xAgyr8B+E96bx98US92KNfWR+n5gVVkeP6C/1i2ZMexDHrYx+IPvXWsQBiyqfqvwfMd0jUC27KBZugrLd6uzQbh7pmalMcSVjW4UXmDTJQ4SbRXZTDIPJXGm8nZ0USq+f6s2nn7fNZC5mloLjVNk5O9Hkv2rhcMXkLo7XQeduL0qF8aKZO7hfq4TBuG75KlnPAvVb4IXhR6qVZZegl3K94G6NMqOnJlAEMRt4mfvZN4Rvh9bPsbmXReZxznKvdOSt+jxovQn0D+Lu3rI4+1VHtk6YjHrWH1GrFbvr/R3p0UVBd9fJfDLLn9zHP4mzSL8C/W9R/QPFn9fOH+s8l5g8uX6ysvlx5dfpq6bv16k8pvlj4zcJvF75dWF3448J3C7sLJwsXC8HCh4W/Lvxt4e+r/1j95+q/V/9jun7+WXXOrxecn9X//g9Ow2y1 z j k AAAyKniclVvZctvIFdVMtomSSWaSx7ygIrtmkpJVlu3K8jbaN2qnVtN2geAlCAub0U1QMov5h7wmv5CvydtUXvMhud2Nxr0NQp6Kqmyhz2lcoLvP7XsIQv08joR8/vz7zz7/0Y9/8tOfffHzxV/88stf/fqrr39zKbJxEcBFkMVZcd33BcRRChcykjFc5wX4ST+Gq/7dhuKvSihElKVd+ZDDm8QP02gYBb5E6KpXfnx39/b9u6+Wnq881z/e/MFqdbC0UP2cvPt69cveIAvGCaQyiH0hXq8+z+WbqV/IKIhhttgbC8j94M4P4TUepn4C4s1U3+/Me4rIwBtmBf5LpadRfsbUT4R4SPrYM/HlSDQ5BbZxr8dy+Jc30yjNxxLSwFxoOI49mXlq8N4gKiCQ8QMe+EER4b16wcgv/EDiFDlX6SfOGKYywgHMFhefqh/vaOvKO1zr7nqbW9t7R3vdveOjc09Ti233uoy/1UjFsgq7+NQ79Is7T+Ct4BoILxt6gZ+bYzUpBQyhKKI0VPc9iMpI2G7DKBwXgHeawiTIksRPB9MegjEM5Ww67UHifdvB4z/MZnN9AlwqKGyvDd1q61dE4agOdqYabb1klts+3Sxv69HPpMwS22ldt+b6VeP2bTf/sR5926P/WI/A9gge6zGwPQaqBy7DLo4uViP0fA/7K13AEBNp4OHcJG4MPFbg7PXqG4zSH3pLqyoIRtnWi2JWDVUHy16cTaB4FmBariz2MKSeVhgurU7NAv6th62pDtB2Ot5uJP14xdtGMQiJOaXWXqgVQ95E3LYRt5sRNS0nmb3m0ovqqsKznTwcUdV4Yc/4MPYHdMrSy6VXc6ct1+fYo5c81Cs9nHOj6k9OByrf3HyVAs58tASwE2LOPrdnn7ecfWbP0jk/yeosW6knxlxd6Jmpc/CRqWkGHBUAzZAs3tLL+Yg0ayz2y/nYfuoBLoI6uWXK4IMZs+3y+KCdOOM8h8JTcUyYrSrMVluYNa/wJzTvjWDPnj3zyywaeGOhtqZo6OWZEBEWGhM6j31MnSr+43enNtwcM6lljIoxp1d9/u9BVoE26kAbPxgIx5yGoPdg01eYGBqu7wilYmkb6tmzR2WCd+fHYYYFZpS0jBM5c3d1p08OlIWaG+maDbXWEsoK3l4PB1HH+vRm0HVOWvvBk+YmNcdNqxo5U59Cze2qo08tijm/qd6T+vwT93w70voCeNfq+NEbrgQHUazEGqsD3NCxgzqq4g3jLCs0rY8Mrw+rDkj1k+lqs9rIAhNhNu2pyh/48XSz2aH042jAO7wzx0UyNdRsLiQI2X6CZmb1iCAXqsblIoqztKpPZxgiS7zSLyIfs9XqG6Q/VZHvZZoVCUZ90kPoycxOZ9GgfWL6LtMnJnCZgJiBywyIAZcBYoYuMyQmdJmQmJHLjIiJXCYi5r3LvCfmzmXuiIldJp5pGReJFwnMWLTggwe12ZkVXPbej4X0Bln6jfSUF0Y5Pqidx1kYL6lip27slK6auUxGTO4yOTEfXOYDMYXLFMQIlxHESJeRxIxdZkxM6TIlMROXmRBz7zL3xDy4zAMxH13m48zYPJsAWJmzensvqySZmlTqD1na1PctRyZLbA/dZjzjONwnmOVGGRDMEqMcEMyyogSCWUqUQ4JZPpQhwSwZyhHBLBPKMcEsDcr3BLMcKO8IZglQxgTHDE4IThjMJprPcEYwE3OZE8yUXH4gmMm4LAhmGi4FwYIvKsGyfU64dEuCmW7LCcFMtOU9wUyx5QPBTK7lR4KtVrdiUJ+p9ae9okW3YETXui+DUV7rzgxGfq17MxgNtu7OYITYuj+DUWPrDg1Gkq17NBhdtu7SyD26T4NRaOtODUamrXs1GK02d2vLJS6XcO7RnRiMdFv3YjD6bd2NwYi4dT8Go+TWHRmMnFv3ZDCabt2VwQi7dV8Go+7WnRmMxFv3ZjA6b92dwYi9dX8Go/jHd2jMhSIKaoeSrFF+rFHaJOsErzN4g+ANBm8SvMngLYK3GLxN8DaDdwjeYfAuwbsM3iN4j8H7BO8z+IDgAwZ3CO4w+JDgQwYfEXzE4GOCjxl8QvAJg08JPmXwGcFnDD4n+JzBXYK7DL4g+ILBlwRfMviK4CsGXxN8zeAbgm8YfEvw7ePbqys6MKpjGl1j+tXSY9w65zZcboNzmy63ybktl9vi3LbLbXNux+V2OLfrcruc23O5Pc7tu9w+5w5c7oBzHZfrcO7Q5Q45d+RyR5w7drljzp243AnnTl3ulHNnLnfGuXOXO+dc1+W6nLtwuQvOXbrcJeeuXO6Kc9cud825G5e74dyty1nZX3ILUX4E/TkCP7s+r88tsxSm9vOsxZKxgXoJFY1SRGHiV7g+JsraZUW5VrmsYIb0DUIWRRsURMiYaFuCCNmRsrpJMiHagiBC1kMbD0TIcGi7gQjZDG0yECFzoa0FImQptKFAhIyEthGIxGyKDEKmQVsGRFI2tQYhg6DtASJkC7QpQITMgLYCiBRs5g0i2IQbhMp9Wa0YW6/SIFTadWFHhAq6LueIUBnXRRwRKt66dCPSZlRdh1r6cT5S661/1+Is+5U4tC4sSJ/C6KFFRcV+0h+oM8wBEVkCocL1b4K1WpVSLYABEcH/CbLirYRrYSvcSrT1QKZTfv9TJVbbQrEG1EKhDtigpkqgtoUCHVILxRlSC4U5ohbeLrtXFOR7aqEY79jcTJUI65FPlQBtCyeTzSKKL2NTMlWisy0U3QdqoeAKNlNTJbR6gqZKZLaFE82mGQVWUgvFNaEWCuueWiiqB2qhoD7Oqq/DsATfG1yXX9QZlV1ddBGhYqtLLSJUYnWBRYQKqy6riFA51cUUESqiuoQiQqVTF05EqGDqcokIlUldJBGh4qhLIyJUEnVBRIQKoS6DiFD508UPESp6uuQhQqVOFzpEqMDp8oYIlTVd1BChYqZLGSJUwnQBQ4QKly5biFC50sUKESpSukQhQqVJFyZEqCDpcoQIlSFdhBC5ZStIdaHPy0JyMqo24h4esdmzqa+YTpX+9eBYATq3BQhV1IVUqO+RNyGI/QJQVKM1tQPhFY0PFMNIPUWFNMgGURpiMH8cK0QM6+NkNhXqAfA5yMcC9LN48ENh+vczTMLmQ9xU6K8PTUmt4ukH2NXQpLGeqWDql+sWI/3LDYtRBshNi1EOyC2LURbIbYtRHsgdi1EmyF2LUS7IPYtRNsh9i1E+yAOLUUbIjsUoJ+ShxSgr5JHFKC/kscUoM+SJxSg35KnFKDvkmcUoP+S5xShDZNdilCPywmKUJfLSYpQn8spilCny2mKUK/LGYpQt8tZixqyhkHcKPx8ZNrQfgQPnk0i4zmDSRbjBYJJGuMlgUke4xWASSLjNYNJIuMNgkkm4y2BSSrjHYBJLuM9g0kt4wGCSTNhhMKkmPGQwCSc8YjBpJzxmMMknPGEwKSg8ZTCJKDxjMOkoPGcwSSnsMpjUFF4wmAQVXjKYNBVeMZhkFV4zmJQV3jCYxBXeMth+GMCtrbJqon7A0mfiEuuEkrbEBqEkLbFJqFbWU29Tf8kxFuD5ngDp4aVjGHhby14fAl/hchQJb5KN4wFC2AJP6K9E0EuOC0+9+JPFGEi9CgP3OXpL/T2v/bZ9m65I6hQ7hJI4xS6hpE2xRyhJU+wTSsoUB4SSMEWHUNKlOCSUZCmOCCVVimNCSZTihFDSpDgllCQpzgglRYpzQkmQokso6VFcEEpyFJeEkhrFFaEkRnFNKGlR3BBKUhS3hNZPY1L0faA/QvjmOUxlAoEcQMc1/8oerlELpbpOLZToBrVQmpvUws1ui1ooom1qoXh2qIWi2aUWimWPWiiSfWqhOA6ohaLoUAvFcEgtFMERtXDxj6mFi35CLVzsU2rhIp9RCxf3nFq4qF1q4WJeUAsX8ZJauHhX1MJFu6YWLtYNtXCRbtn1KqdVuSy1ZMCXTBrHhVuKyl/9Lh8msUGXvUkkR9lYemh3vAmWtBwK1xABOSLHDVWXl7UGdMc5IwjaLkHDL4E2TNBwTKAtEzQ8E2jTBA3XBNo2QcM3gTZO0HBOoK0TNLwTaPMEDfcE2j5Bwz+BNlDQcFCgLRQ0PBRoEwUNFwXaRkHDR4E2UtBwUqCtFDS8FGgzBQ03BdpOQcNPgTZU0HBUoC0VNDwVaFMFDVcF2lZBw1eBNlbQcFagrRU0vBVocwUNdwXaXkHDX4E2WMAcFn5SwJIjizF443QARfyg3mca+NL3QkihwGqj2pFApffHqvS4ss1V19k0fzftFclUN3ThU1EhyaMiwpLnnF+/Vth/0OVOvyGiLoL1sRHbvjwy8iV+Uncv4fQ84T1PZm03k2QDiD81EN2hHolpzV2n6nTyqU65jOIBVD17ulHffX0GbhMyC0a+UK/d+mOZ6U9QUDh32Hi3NTd96nusTpm/gQE4/UyzpV+BBG46tp9pohYC/QzN7Rz7eewHMKtftulUwMx76lXH7vS652/N6oq31byRjmDv83Sa7NmM1/bGrpnkbI4bZFzM7HM3lyggnNVP0ppUIGmMqhUNIyiaoUU2lIl/Tz0t0OyHxSLT7zeZh2zzUfJ4rEb/UT0JcNmDzoy/3HTQmVvAS7+gO1CNZnyJv/wC177IWM/zuQXYyEqiVUMJ9CqLh4WfqAdSo0lWoEEV/oPwnnTevniiXuzRr6yPU/OCqshx/YV+sexJD+KY9bEPRJ9661gAMeVT9d8D5jsk6gU35YJNUNZbvV2ajUNdM7UpjiQs6/Ai8wYZqHCT6C7KYRD5K423k7MiidVz/dm08/b5rIXMUlDcahsnJ/q8F21crpi8hdFa6LztRelQPjRTJ/cL9XAYtw1fJcs54F4r/BC8KPXSrDL0Eu5XvI1RJtT0ZMoABiNvEz/7pvCN8PpZdrey6DzOOc7V7pwVf0SNF6G+AfzdW1ZHn+qo9knTEY/aQ2q1Yjf9/yM9uiiornr5LwbZ8/uYZ3E26Rfg3y3qP6D4q/r5U/3nEvMHly9WVl+uvDp9tfTdevWnFF8s/G7h9wvfLqwu/Hnhu4XdhZOFi4Vg4W7h7wv/WPjn6r9W/736/ep/TNfPP6vO+e2C87P63/8BGR9qMw== (b) PartsT oPoints Decoder . Figure 3: PointsT oParts Autoencoder . Left : Points are encoded into part capsules using Multi-V ie w Agreement. Right : Part cap- sules are decoded into points. using farthest-point sampling on X , their rotation compo- nents randomly , and their feature components to 0 . A ran- dom perturbation (translation and rotation) is applied to the current estimate of v j q to generate viewpoints. The FoldingNet [ 21 ] is used as the decoding network G , where a surface is represented using a feature vector v f ∈ R D , that describes how a 2D unit square can be folded into that surface. The surface represented by any feature v j f can be decoded using a neural network, G : ( R D × R 2 ) → R 3 , that maps v j f concatenated with 2D points sampled from a unit square S to 3D points. The pose v j q is used to transform the generated 3D sur- face to the global frame, as shown in Figure 3b . The PointsT oPartsDecoder Procedure in Algorithm 1 describes this in detail. The union of the surfaces generated from each part capsule Y = ∪ J j =1 Y j is the reconstruction output. T o train the model, the (squared) Chamfer distance be- tween Y and the input point cloud X can no w be computed: L = d Chamfer ( X, Y ) = 1 | Y | X y ∈ Y min x ∈ X || x − y || 2 + 1 | X | X x ∈ X min y ∈ Y || x − y || 2 , where loss is m inimized using AD AM [ 10 ] to train the neu- ral networks F , Q , and G . The routing probabilities R ij are estimated through an iterativ e process. x i should belong to v j , if the point is well explained by the generated part surface Y j (i.e. it has high Algorithm 1 PointsT oParts Require: 3D Point Cloud X , Initial Part Capsules V , Number of iterations T 1: for t ← 1 to T do 2: { Y j } J j =1 ← P artsT oPointsDecoder ( V ) 3: for each i , j do 4: b ij ← log P ( x i | Y j ) 5: R ij ← softmax j b ij 6: V ← PointsT oPartsEncoder ( X , R, V ) 7: retur n V 8: procedur e P O I N T S T O P A RT S E N C O D E R ( X , R, V ) 9: for j ← 1 to J do 10: for k ← 1 to K do 11: z j k ← v j q ◦ r , r ∼ random perturbation 12: ∆ z j k ← Q ( X | z j k , R ) 13: f j k ← F ( X | z j k ◦ ∆ z j k , R ) 14: µ j , σ j ← compute mean and v ariance of { f j k } 15: v j q ← z j 1 ◦ ∆ z j 1 16: v j f ← µ j + σ j ∗ , ∼ N (0 , 1) 17: V ← { ( v j q , v j f ) } J j =1 18: retur n V 19: procedur e P A RT S T O P O I N T S D E C O D E R ( V ) 20: for j ← 1 to J do 21: S ← M samples from Unif( [ − 0 . 5 , 0 . 5] 2 ) 22: Y j = { v j q y | y = G ( v j f , s ) , s ∈ S } 23: retur n { Y j } J j =1 log-likelihood under a Gaussian distrib ution whose mean is defined by Y j ). This can be approximated by finding the point in Y j that is most likely to ha ve generated x i : b ij ≡ log P ( x i | Y j ) ∝ − min y ∈ Y j || x i − y || 2 σ 2 j + log( σ j ) ! , where σ j is a standard deviation that describes ho w uncer- tain the model is about the surface. W e tried learning σ j as the output of the decoding network G , b ut we found that the model works just as well if we simply set it to a constant ( ≈ e − 6 in our experiments). These log probs are used to compute the routing probabilities R ij = softmax ( b i ) . Altogether , the PointsT oParts Autoencoder works itera- tiv ely , as described in Algorithm 1 . Giv en X and an initial V , the decoder and encoder are run iterativ ely to route the points to parts. W e found that 3 iterations of these steps are sufficient to reach con vergence for R . 4 A p p l e C on f i d e n t i a l –I n t e r n a l U s e O n l y ENCODER Poi nts → Parts → Object DECODER Object → Parts → P oints Loss … . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Part Capsules Object Capsule vote vote Viewpoints object feature to parts Chamfer L oss . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Reconstructed Par t Ca ps ul es … poses in global frame copy Recon struc ted Poin t Cl oud each part decoded at its pose … … update routing Initial Part Capsules … T arget Part Capsules update poses and featur es poses in object's canonical frame Input Poin t Cloud update poses and featur es update routing V AAAyJHiclVvLctvIFdVMXhMlk8wky2xQkV0zSckqy57KYzd6SxYlURL1ND0uELwEYeFldBOUzGJ+INvkF/I12aWyyCbfktvdaNzbIOSpqMoW+pzGBbr73L6HIDTI40jI58//88mnP/jhj378k89+uvyzn3/+i19+8eWvLkU2KQK4CLI4K64HvoA4SuFCRjKG67wAPxnEcDW421L8VQmFiLK0Jx9yeJP4YRqNosCXCJ1evv1i5fnac/3jLR6sVwcrS9VP9+2X65/3h1kwSSCVQewL8Xr9eS7fzPxCRkEM8+X+REDuB3d+CK/xMPUTEG9m+k7n3lNEht4oK/BfKj2N8jNmfiLEQzLAnokvx6LJKbCNez2Roz+9mUVpPpGQBuZCo0nsycxTw/aGUQGBjB/wwA+KCO/VC8Z+4QcSJ8e5yiBxxjCTEQ5gvrz8VP14xztX3tFGb9/b3tk9OD7oHZwcn3uaWm6711X8rUYqVlXY5afekV/ceQJvBWdfeNnIC/zcHKtJKWAERRGlobrvYVRGwnYbReGkALzTFKZBliR+Opz1EYxhJOezWR8S7+sOHv9uPl/oE+BSQWF7belWW78iCsd1sDPVaOsls9z26WV5W49BJmWW2E6burXQrxq3b7v5j/UY2B6Dx3oEtkfwWI+h7TFUPXAZ9nF0sRqh53vYX+kCRphCQw/nJnFj4LEC56/X32CUwchbWVdBMMquXhSzaqg6WPXibArFswATcm25jyH1tMJoZX1mFvAvfWzNdIC20/F2I+nHa94uikFIzCm19kKtGPIm4q6NuNuMqGk5zew1V15UVxWe7eThiKrGC3vG+4k/pFNWXq58s3Daan2OPXrJQ32jh3NuVP3R6UDlm5uvUsCZj5YAdkLM2ef27POWs8/sWTrnp1mdZWv1xJirCz0zdQ4+MjXNgOMCoBmSxVt5uRiRZo3FfrkY2089wEVQJ7dMGbw3Y7ZdHh+0E2eS51B4Ko4Js1OF2WkLs+EV/pTmvRHs2bNnfplFQ28i1NYUjbw8EyLCEmNC57GPqVPFf/zu1IabYya1jFEx5vSqz/89yCrQVh1o63sD4ZjTEPQebPoKE0PD9R2hVCxtQz179qhM8O78OMywwIyTlnEiZ+6u7vTRgbJQCyPdsKE2WkJZwdvr4SDqWB/fDHrOSRvfe9LCpOa4aVUjZ+pTqLlddfSxRTHnN9Xbrc/vuufbkdYXwLtWx4/ecCU4iGIl1lgd4IaOHdRRFW8UZ1mhaX1keH1YdUBqkMzWm9VGFpgI81lfVf7Aj2fbzQ6lH0dD3uGtOS6SmaHmCyFByPYTNDOvRwS5UDUuF1GcpVV9OsMQWeKVfhH5mK1W3yD9mYp8L9OsSDDqkz5CT+Z2OosG7RMzcJkBMYHLBMQMXWZIDLgMEDNymRExocuExIxdZkxM5DIRMe9c5h0xdy5zR0zsMvFcy7hIvEhgxqL5Hj6ozc6s4Kr3biKkN8zSr6SnvDDK8UHtPM7CeEkVO3Vjp3TVzGUyYnKXyYl57zLviSlcpiBGuIwgRrqMJGbiMhNiSpcpiZm6zJSYe5e5J+bBZR6I+eAyH+bG5tkEwMqc1dt7WSXJzKTSYMTSpr5vOTZZYnvoNuMZx+EBwSw3yoBglhjlkGCWFSUQzFKiHBHM8qEMCWbJUI4JZplQTghmaVC+I5jlQHlHMEuAMiY4ZnBCcMJgNtF8hjOCmZjLnGCm5PI9wUzGZUEw03ApCBZ8UQmW7XPCpVsSzHRbTglmoi3vCWaKLR8IZnItPxBstboTg/pMrT/tFS26BSO61n0ZjPJad2Yw8mvdm8FosHV3BiPE1v0ZjBpbd2gwkmzdo8HosnWXRu7RfRqMQlt3ajAybd2rwWi1uVtbLnG5hHOP7sRgpNu6F4PRb+tuDEbErfsxGCW37shg5Ny6J4PRdOuuDEbYrfsyGHW37sxgJN66N4PReevuDEbsrfszGMU/vkNjLhRRUDuUZIPyY4PSJtkkeJPBWwRvMXib4G0G7xC8w+BdgncZvEfwHoP3Cd5n8AHBBwx+RfArBh8SfMjgDsEdBh8RfMTgY4KPGXxC8AmDuwR3GXxK8CmDzwg+Y/A5wecM7hHcY/AFwRcMviT4ksFXBF8x+JrgawbfEHzD4FuCbx/fXl3RgVEd0+gG06+WHuM2Obflcluc23a5bc7tuNwO53Zdbpdzey63x7l9l9vn3IHLHXDulcu94tyhyx1yruNyHc4dudwR545d7phzJy53wrmuy3U5d+pyp5w7c7kzzp273Dnnei7X49yFy11w7tLlLjl35XJXnLt2uWvO3bjcDeduXc7K/pJbiPID6M8R+Nn1eX1umaUws59nLZZMDNRPqGiUIgoTv8L1MVHWLivKtcplBTNkYBCyKNqgIELGRNsSRMiOlNVNkgnRFgQRsh7aeCBChkPbDUTIZmiTgQiZC20tECFLoQ0FImQktI1AJGZTZBAyDdoyIJKyqTUIGQRtDxAhW6BNASJkBrQVQKRgM28QwSbcIFTuy2rF2HqVBqHSrgs7IlTQdTlHhMq4LuKIUPHWpRuRNqPqOtTSj/OxWm/9uxZnOajEoXVhQfoURg8tKir2k8FQnWEOiMgSCBWufxOs1aqUagEMiAj+T5AVbyVcC1vhVqKtBzKb8fufKbHaFoo1oBYKdcgGNVMCtS0U6IhaKM6QWijMMbXwdtm9oiDfUQvFeMfmZqZEWI98pgRoWziZbBZRfBmbkpkSnW2h6N5TCwVXsJmaKaHVEzRTIrMtnGg2zSiwkloorim1UFj31EJRPVALBfVhXn0dhiX43uC6/KLOqOzqoosIFVtdahGhEqsLLCJUWHVZRYTKqS6miFAR1SUUESqdunAiQgVTl0tEqEzqIokIFUddGhGhkqgLIiJUCHUZRITKny5+iFDR0yUPESp1utAhQgVOlzdEqKzpooYIFTNdyhChEqYLGCJUuHTZQoTKlS5WiFCR0iUKESpNujAhQgVJlyNEqAzpIoTILVtBqgsDXhaS7rjaiPt4xGbPpr5iOlX614NjBejcFiBUUQ9Sob5H3oYg9gtAUY031A6EVzQ+UIwi9RQV0iAbRmmIwfxJrBAxqo+T+UyoB8DnIB8LMMji4feFGdzPMQmbD3FTob8+NCW1iqcfYFdDk8Z6poKpX25ajPQvtyxGGSC3LUY5IHcsRlkgdy1GeSD3LEaZIPctRrkgDyxG2SBfWYzyQR5ajDJCdixGOSGPLEZZIY8tRnkhTyxGmSG7FqPckKcWo+yQZxaj/JDnFqMMkT2LUY7IC4tRlshLi1GeyCuLUabIa4tRrsgbi1G2yFuLGbOGQt4r/Hxs2NB+BA6cTyLhJoNJF+EWg0ka4TaDSR3hDoNJIOEug0kj4R6DSSbhPoNJKeEBg0ks4SsGk17CQwaTZMIOg0k14RGDSTjhMYNJO+EJg0k+YZfBpKDwlMEkovCMwaSj8JzBJKWwx2BSU3jBYBJUeMlg0lR4xWCSVXjNYFJWeMNgEld4y2D7YQC3tsqqifoBy4CJS2wSStoSW4SStMQ2oVpZT71t/SXHRIDnewKkh5eOYejtrHoDCHyFy3EkvGk2iYcIYQs8ob8SQS85KTz14k8WYyD1Kgzc5+gt9fe89tv2XboiqVPsEUriFPuEkjbFAaEkTfGKUFKmOCSUhCk6hJIuxRGhJEtxTCipUpwQSqIUXUJJk+KUUJKkOCOUFCnOCSVBih6hpEdxQSjJUVwSSmoUV4SSGMU1oaRFcUMoSVHcElo/jUnR94H+COGb5zCVCQRyAB3X/Ct7uEEtlOomtVCiW9RCaW5TCze7HWqhiHapheLZoxaKZp9aKJYDaqFIXlELxXFILRRFh1oohiNqoQiOqYWLf0ItXPQutXCxT6mFi3xGLVzcc2rhovaohYt5QS1cxEtq4eJdUQsX7ZpauFg31MJFumXXq5xW5bLUkgFfMmkcF24pKn/1u3yYxAZd9aaRHGcT6aHd8aZY0nIoXEME5IgcN1RdXtYa0B0XjCBouwQNvwTaMEHDMYG2TNDwTKBNEzRcE2jbBA3fBNo4QcM5gbZO0PBOoM0TNNwTaPsEDf8E2kBBw0GBtlDQ8FCgTRQ0XBRoGwUNHwXaSEHDSYG2UtDwUqDNFDTcFGg7BQ0/BdpQQcNRgbZU0PBUoE0VNFwVaFsFDV8F2lhBw1mBtlbQ8FagzRU03BVoewUNfwXaYAFzWPhJAUuOLCbgTdIhFPGDep9p6EvfCyGFAquNakcClT6YqNLjyjZXXeez/O2sXyQz3dCFT0WFJI+KCEuec379WuHgQZc7/YaIugjWx0Zs+/LI2Jf4Sd29hNOzy3t25203k2RDiD82EN2hHolpLVyn6tT9WKdcRvEQqp593ajvvj4DtwmZBWNfqNdu/YnM9CcoKJw7bLzbmps+9T1WpyzewBCcfqbZ0q9AAjcd2880UQuBfobmdo79PPYDmNcv23QqYO499apjd3rd83fmdcXbad5IR7D3eTpN9mzOa3tj10xyNscNMi7m9rmbSxQQzusnaU0qkDRG1YpGERTN0CIbycS/p54WaPbDYpHp95vMQ7bFKHk8UaP/oJ4EuOxhZ85fbjrsLCzgpV/QHahGM77EX36Ba19krOf5wgJsZSXRqqEEepXFo8JP1AOp8TQr0KAK/0F4TzrfvXiiXuzRr6xPUvOCqshx/YV+sexJH+KY9bEPRJ96m1gAMeVT9d8D5jsk6gU35YJNUNZbvV2aTUJdM7UpjiSs6vAi84YZqHDT6C7KYRj5a423k7MiidVz/fms893zeQuZpaC49TZOTvV5L9q4XDF5C6O10PmuH6Uj+dBMndwv1MNh3DZ8lSzngHut8EPwotRLs8rQS7hf87bGmVDTkykDGIy9bfzsm8JXwhtk2d3asvM45yRXu3NW/B41XoT6BvB3f1Udfayj2idNRzxqD6nVit30/4/06KGgeurlvxhk3x9gnsXZdFCAf7es/4Diz+rnD/WfSyweXL5YW3+59s3pNyvfblZ/SvHZ0m+Wfrv09dL60h+Xvl3aX+ouXSwFS7D016W/Lf19/R/r/1z/1/q/TddPP6nO+fWS87P+3/8BHBJnbw== V init AAAyNHiclVvbcty4EZ3NdaNks7vJY15YkV27Sckqy97K5W11l6zRdXT3eF0cTg+HFm8mMJRk1uRH8pr8Qv4lVXlL5TXfkAZAsBsU5a2oyhZxDtgkgNPoMxxqlMeRkM+f//OTH/zwRz/+yU8//dnCz3/x2S8//+LLX52LbFYEcBZkcVZcjnwBcZTCmYxkDJd5AX4yiuFidLOu+IsSChFl6am8z+FN4odpNIkCXyL09ovPz99WQwl3sorSSM7nb79YfL78XP94Dw9W6oPFXv1z9PbLlc+G4yyYJZDKIPaFeL3yPJdvKr+QURDDfGE4E5D7wY0fwms8TP0ExJtK3/nce4rI2JtkBf5LpadRfkblJ0LcJyPsmfhyKtqcAru41zM5+dMbHFM+k5AG5kKTWezJzFPT4I2jAgIZ3+OBHxQR3qsXTP3CDyROlnOVUeKMoZIRDmC+sPBU/XgHmxfe/urpjrexubV7sHu6e3gw8DS10HWvS/hbjVQsqbALT719v7jxBN4KrobwsokX+Lk5VpNSwASKIkpDdd/jqIyE7TaJwlkBeKcp3AZZkvjpuBoiGMNEzqtqCIn3dR+PfzefP+gT4FJBYXut61ZXvyIKp02wE9Xo6iWz3PY5zfKuHqNMyiyxndZ060G/ety+7eY/1mNke4we6xHYHsFjPca2x1j1wGXYwdHFaoSe72F/pQuYYEqNPZybxI2Bxwqcv155g1FGE29xRQXBKFt6UcyqoepgyYuzWyieBZigywtDDKmnFSaLK5VZwL8MsVXpAF2n4+1G0o+XvS0Ug5CYU2rthVox5E3ELRtxqx1R0/I2s9dcfFFfVXi2k4cjqhsv7BnvZ/6YTll8ufjNg9OWmnPs0Use6hs9nIFR9UenA5Vvbr5OAWc+OgLYCTFnD+zZg46zT+xZOudvsybLlpuJMVcXemaaHHxkatoBpwVAOySLt/jyYUSaNRb75cPYfuoBLoI6uWPK4L0Zs+3y+KCdOLM8h8JTcUyYzTrMZleYVa/wb2neW8GePXvml1k09mZCbU3RxMszISIsOSZ0HvuYOnX8x+9Obbg5ZlLHGBVjTq/7/N+DrAOtN4HWvzcQjjkNQe/Bpq8wMTTc3BFKxdI21LNnj8oE786PwwwLzDTpGCdy5u6aTh8dKAv1YKSrNtRqRygreHs9HEQT6+Obwalz0ur3nvRgUnPctOqRM/Up1NyuOvrYopjz2+o9as4/cs+3I20ugHetjh+94VpwEMVKrLE6wA0dO6ijOt4kzrJC0/rI8Pqw7oDUKKlW2tVGFpgI82qoKn/gx9VGu0Ppx9GYd3hrjoukMtT8QUgQsvsEzcybEUEuVI3LRRRnaV2fTjBElnilX0Q+ZqvVN0i/MiYwzYoEoz4ZIvRkbqezaNE+MSOXGRETuExAzNhlxsSAywAxE5eZEBO6TEjM1GWmxEQuExHzzmXeEXPjMjfExC4Tz7WMi8SLBGYsmvHxvdrszAouee9mQnrjLP1KesoLoxzv1c7jLIyX1LFTN3ZKV81cJiMmd5mcmPcu856YwmUKYoTLCGKky0hiZi4zI6Z0mZKYW5e5JebOZe6IuXeZe2I+uMyHubF5NgGwMmfN9l7WSVKZVBpNWNo09y2nJktsD91mPOM4PCKY5UYZEMwSoxwTzLKiBIJZSpQTglk+lCHBLBnKKcEsE8oZwSwNyncEsxwobwhmCVDGBMcMTghOGMwmms9wRjATc5kTzJRcvieYybgsCGYaLgXBgi8qwbJ7Trh0S4KZbstbgployzuCmWLLe4KZXMsPBFutbsagPlPrT3tFh27BiK5zXwajvM6dGYz8OvdmMBrs3J3BCLFzfwajxs4dGowkO/doMLrs3KWRe3SfBqPQzp0ajEw792owWm3v1pZLXC7h3KM7MRjpdu7FYPTbuRuDEXHnfgxGyZ07Mhg5d+7JYDTduSuDEXbnvgxG3Z07MxiJd+7NYHTeuTuDEXvn/gxG8Y/v0JgLRRQ0DiVZpfxYpbRJ1gheY/A6wesM3iB4g8GbBG8yeIvgLQZvE7zN4B2Cdxi8S/Aug18R/IrBewTvMbhPcJ/B+wTvM/iA4AMGHxJ8yOAjgo8YfEzwMYNPCD5h8IDgAYNPCT5l8BnBZww+J/icwRcEXzD4kuBLBl8RfMXga4KvH99eXdGBUR3T6CrTr5Ye49Y4t+5y65zbcLkNzm263Cbntlxui3PbLrfNuR2X2+Hcrsvtcu6Vy73i3J7L7XGu73J9zu273D7nDlzugHOHLnfIuSOXO+Lcscsdc+7E5U44N3C5AedOXe6Uc2cud8a5c5c759yFy11w7tLlLjl35XJXnLt2OSv7c24hyg+gP0fgZ9fnzblllkJlP89aLJkZaJhQ0ShFFCZ+jetjoqxdVpRrlcsaZsjIIGRRtEFBhIyJtiWIkB0p65skE6ItCCJkPbTxQIQMh7YbiJDN0CYDETIX2logQpZCGwpEyEhoG4FIzKbIIGQatGVAJGVTaxAyCNoeIEK2QJsCRMgMaCuASMFm3iCCTbhBqNyX9Yqx9SoNQqVdF3ZEqKDrco4IlXFdxBGh4q1LNyJdRtV1qKUf51O13vp3I85yVItD68KC9CmMHlrUVOwno7E6wxwQkSUQKlz/JlirVSnVAhgQEfyfICveWrgWtsKtRdsMpKr4/VdKrLaFYg2ohUIds0FVSqC2hQKdUAvFGVILhTmlFt4uu1cU5DtqoRhv2NxUSoTNyCslQNvCyWSziOLL2JRUSnS2haJ7Ty0UXMFmqlJCayaoUiKzLZxoNs0osJJaKK5baqGw7qiForqnFgrqw7z+OgxL8J3BdflFnVHZ1UUXESq2utQiQiVWF1hEqLDqsooIlVNdTBGhIqpLKCJUOnXhRIQKpi6XiFCZ1EUSESqOujQiQiVRF0REqBDqMogIlT9d/BChoqdLHiJU6nShQ4QKnC5viFBZ00UNESpmupQhQiVMFzBEqHDpsoUIlStdrBChIqVLFCJUmnRhQoQKki5HiFAZ0kUIkWu2glQXRrwsJEfTeiMe4hGbPZv6iunX6d8MjhWggS1AqKJTSIX6HnkDgtgvAEU1XVU7EF7R+EAxidRTVEiDbBylIQbzZ7FCxKQ5TuaVUA+AByAfCzDK4vH3hRndzTEJ2w9xU6G/PjQltY6nH2DXQ5PGeqaCqV+uWYz0L9ctRhkgNyxGOSA3LUZZILcsRnkgty1GmSB3LEa5IHctRtkgX1mM8kHuWYwyQvYtRjkh9y1GWSEPLEZ5IQ8tRpkhjyxGuSGPLUbZIU8sRvkhBxajDJGnFqMckWcWoyyR5xajPJEXFqNMkZcWo1yRVxajbJHXFjNmDYW8Xfj51LCh/QgcOJ9EwjUGky7CdQaTNMINBpM6wk0Gk0DCLQaTRsJtBpNMwh0Gk1LCXQaTWMJXDCa9hHsMJsmEfQaTasJ9BpNwwgMGk3bCQwaTfMIjBpOCwmMGk4jCEwaTjsIBg0lK4SmDSU3hGYNJUOE5g0lT4QWDSVbhJYNJWeEVg0lc4TWD7YcB3NpqqyaaBywjJi6xRihpS6wTStISG4RqZT31NvSXHDMBnu8JkB5eOoaxt7nkjSDwFS6nkfBus1k8Rghb4An9lQh6yVnhqRd/shgDqVdh4C5Hb6m/57Xftm/RFUmdYptQEqfYIZS0KXYJJWmKV4SSMsUeoSRM0SeUdCn2CSVZigNCSZXikFASpTgilDQpjgklSYoTQkmRYkAoCVKcEkp6FGeEkhzFOaGkRnFBKIlRXBJKWhRXhJIUxTWhzdOYFH0f6I8QvnkOU5tAIAfQd82/soer1EKprlELJbpOLZTmBrVws9ukFopoi1oonm1qoWh2qIVi2aUWiuQVtVAce9RCUfSphWLYpxaK4IBauPiH1MJFP6IWLvYxtXCRT6iFizugFi7qKbVwMc+ohYt4Ti1cvAtq4aJdUgsX64pauEjX7Hq106pdlloy4EsmjePCLUXlr36XD5PYoEvebSSn2Ux6aHe8WyxpORSuIQJyRI4bqi8vGw3ojg+MIGi7BC2/BNowQcsxgbZM0PJMoE0TtFwTaNsELd8E2jhByzmBtk7Q8k6gzRO03BNo+wQt/wTaQEHLQYG2UNDyUKBNFLRcFGgbBS0fBdpIQctJgbZS0PJSoM0UtNwUaDsFLT8F2lBBy1GBtlTQ8lSgTRW0XBVoWwUtXwXaWEHLWYG2VtDyVqDNFbTcFWh7BS1/BdpgAXNY+EkBS44sZuDN0jEU8b16n2nsS98LIYUCq41qRwKVPpqp0uPKNldd51X+thoWSaUbuvCpqJDkURFhyXPOb14rHN3rcqffEFEXwfrYim1fHpn6Ej+pu5dweh7xnkfzrptJsjHEHxuI7tCMxLQeXKfudPSxTrmM4jHUPYe60dx9cwZuEzILpr5Qr936M5npT1BQOHfYerc1N32ae6xPeXgDY3D6mWZHvwIJ3HRsP9NELQT6GZrbOfbz2A9g3rxs06+BuffUq4/d6XXP35w3FW+zfSN9wd7n6bfZkzmv7a1dM8nZHLfIuJjb524uUUA4b56ktalA0hhVK5pEULRDi2wiE/+Oelqg3Q+LRabfbzIP2R5GyeOZGv0H9STAZff6c/5y017/wQKe+wXdgWq040v85Re49kXGeg4eLMB6VhKtGkqgF1k8KfxEPZCa3mYFGlTh3wvvSf+7F0/Uiz36lfVZal5QFTmuv9Avlj0ZQhyzPvaB6FNvDQsgpnyq/rvHfIdEveCmXLAJynqrt0uzWahrpjbFkYQlHV5k3jgDFe42uolyGEf+cuvt5KxIYvVcf171v3s+7yCzFBS30sXJW33eiy4uV0zewWgt9L8bRulE3rdTJ/cL9XAYtw1fJcsAcK8VfghelHppVht6CXfL3vo0E2p6MmUAg6m3gZ99U/hKeKMsu1lecB7nHOZqd86K36PGi1DfAP4eLqmjj3VU+6TpiEfdIbVasZv+/5EepyioU/XyXwxy6I8wz+LsdlSAf7Og/4Diz+rnD82fSzw8OH+xvPJy+Zvjbxa/Xav/lOLT3m96v+193Vvp/bH3bW+nd9Q76wW9We+vvb/1/r7yj5V/rfx75T+m6w8+qc/5dc/5Wfnv/wDQjG5Q X AAAyJHiclVvLctvIFdVMXhMlk8wky2xQkV0zSckqy57KYzd6SxYlURL1ND0uELwEYeFldBOUzGJ+INvkF/I12aWyyCbfktvdaNzbIOSpqMoW+pzGBbr73L6HIDTI40jI58//88mnP/jhj378k89+uvyzn3/+i19+8eWvLkU2KQK4CLI4K64HvoA4SuFCRjKG67wAPxnEcDW421L8VQmFiLK0Jx9yeJP4YRqNosCXCJ1ev/1i5fnac/3jLR6sVwcrS9VP9+2X65/3h1kwSSCVQewL8Xr9eS7fzPxCRkEM8+X+REDuB3d+CK/xMPUTEG9m+k7n3lNEht4oK/BfKj2N8jNmfiLEQzLAnokvx6LJKbCNez2Roz+9mUVpPpGQBuZCo0nsycxTw/aGUQGBjB/wwA+KCO/VC8Z+4QcSJ8e5yiBxxjCTEQ5gvrz8VP14xztX3tFGb9/b3tk9OD7oHZwcn3uaWm6711X8rUYqVlXY5afekV/ceQJvBWdfeNnIC/zcHKtJKWAERRGlobrvYVRGwnYbReGkALzTFKZBliR+Opz1EYxhJOezWR8S7+sOHv9uPl/oE+BSQWF7belWW78iCsd1sDPVaOsls9z26WV5W49BJmWW2E6burXQrxq3b7v5j/UY2B6Dx3oEtkfwWI+h7TFUPXAZ9nF0sRqh53vYX+kCRphCQw/nJnFj4LEC56/X32CUwchbWVdBMMquXhSzaqg6WPXibArFswATcm25jyH1tMJoZX1mFvAvfWzNdIC20/F2I+nHa94uikFIzCm19kKtGPIm4q6NuNuMqGk5zew1V15UVxWe7eThiKrGC3vG+4k/pFNWXq58s3Daan2OPXrJQ32jh3NuVP3R6UDlm5uvUsCZj5YAdkLM2ef27POWs8/sWTrnp1mdZWv1xJirCz0zdQ4+MjXNgOMCoBmSxVt5uRiRZo3FfrkY2089wEVQJ7dMGbw3Y7ZdHh+0E2eS51B4Ko4Js1OF2WkLs+EV/pTmvRHs2bNnfplFQ28i1NYUjbw8EyLCEmNC57GPqVPFf/zu1IabYya1jFEx5vSqz/89yCrQVh1o63sD4ZjTEPQebPoKE0PD9R2hVCxtQz179qhM8O78OMywwIyTlnEiZ+6u7vTRgbJQCyPdsKE2WkJZwdvr4SDqWB/fDHrOSRvfe9LCpOa4aVUjZ+pTqLlddfSxRTHnN9Xbrc/vuufbkdYXwLtWx4/ecCU4iGIl1lgd4IaOHdRRFW8UZ1mhaX1keH1YdUBqkMzWm9VGFpgI81lfVf7Aj2fbzQ6lH0dD3uGtOS6SmaHmCyFByPYTNDOvRwS5UDUuF1GcpVV9OsMQWeKVfhH5mK1W3yD9mYp8L9OsSDDqkz5CT+Z2OosG7RMzcJkBMYHLBMQMXWZIDLgMEDNymRExocuExIxdZkxM5DIRMe9c5h0xdy5zR0zsMvFcy7hIvEhgxqL5Hj6ozc6s4Kr3biKkN8zSr6SnvDDK8UHtPM7CeEkVO3Vjp3TVzGUyYnKXyYl57zLviSlcpiBGuIwgRrqMJGbiMhNiSpcpiZm6zJSYe5e5J+bBZR6I+eAyH+bG5tkEwMqc1dt7WSXJzKTSYMTSpr5vOTZZYnvoNuMZx+EBwSw3yoBglhjlkGCWFSUQzFKiHBHM8qEMCWbJUI4JZplQTghmaVC+I5jlQHlHMEuAMiY4ZnBCcMJgNtF8hjOCmZjLnGCm5PI9wUzGZUEw03ApCBZ8UQmW7XPCpVsSzHRbTglmoi3vCWaKLR8IZnItPxBstboTg/pMrT/tFS26BSO61n0ZjPJad2Yw8mvdm8FosHV3BiPE1v0ZjBpbd2gwkmzdo8HosnWXRu7RfRqMQlt3ajAybd2rwWi1uVtbLnG5hHOP7sRgpNu6F4PRb+tuDEbErfsxGCW37shg5Ny6J4PRdOuuDEbYrfsyGHW37sxgJN66N4PReevuDEbsrfszGMU/vkNjLhRRUDuUZIPyY4PSJtkkeJPBWwRvMXib4G0G7xC8w+BdgncZvEfwHoP3Cd5n8AHBBwx+RfArBh8SfMjgDsEdBh8RfMTgY4KPGXxC8AmDuwR3GXxK8CmDzwg+Y/A5wecM7hHcY/AFwRcMviT4ksFXBF8x+JrgawbfEHzD4FuCbx/fXl3RgVEd0+gG06+WHuM2Obflcluc23a5bc7tuNwO53Zdbpdzey63x7l9l9vn3IHLHXDulcu94tyhyx1yruNyHc4dudwR545d7phzJy53wrmuy3U5d+pyp5w7c7kzzp273Dnnei7X49yFy11w7tLlLjl35XJXnLt2uWvO3bjcDeduXc7K/pJbiPID6M8R+Nn1eX1umaUws59nLZZMDNRPqGiUIgoTv8L1MVHWLivKtcplBTNkYBCyKNqgIELGRNsSRMiOlNVNkgnRFgQRsh7aeCBChkPbDUTIZmiTgQiZC20tECFLoQ0FImQktI1AJGZTZBAyDdoyIJKyqTUIGQRtDxAhW6BNASJkBrQVQKRgM28QwSbcIFTuy2rF2HqVBqHSrgs7IlTQdTlHhMq4LuKIUPHWpRuRNqPqOtTSj/OxWm/9uxZnOajEoXVhQfoURg8tKir2k8FQnWEOiMgSCBWufxOs1aqUagEMiAj+T5AVbyVcC1vhVqKtBzKb8fufKbHaFoo1oBYKdcgGNVMCtS0U6IhaKM6QWijMMbXwdtm9oiDfUQvFeMfmZqZEWI98pgRoWziZbBZRfBmbkpkSnW2h6N5TCwVXsJmaKaHVEzRTIrMtnGg2zSiwkloorim1UFj31EJRPVALBfVhXn0dhiX43uC6/KLOqOzqoosIFVtdahGhEqsLLCJUWHVZRYTKqS6miFAR1SUUESqdunAiQgVTl0tEqEzqIokIFUddGhGhkqgLIiJUCHUZRITKny5+iFDR0yUPESp1utAhQgVOlzdEqKzpooYIFTNdyhChEqYLGCJUuHTZQoTKlS5WiFCR0iUKESpNujAhQgVJlyNEqAzpIoTILVtBqgsDXhaS7rjaiPt4xGbPpr5iOlX614NjBejcFiBUUQ9Sob5H3oYg9gtAUY031A6EVzQ+UIwi9RQV0iAbRmmIwfxJrBAxqo+T+UyoB8DnIB8LMMji4feFGdzPMQmbD3FTob8+NCW1iqcfYFdDk8Z6poKpX25ajPQvtyxGGSC3LUY5IHcsRlkgdy1GeSD3LEaZIPctRrkgDyxG2SBfWYzyQR5ajDJCdixGOSGPLEZZIY8tRnkhTyxGmSG7FqPckKcWo+yQZxaj/JDnFqMMkT2LUY7IC4tRlshLi1GeyCuLUabIa4tRrsgbi1G2yFuLGbOGQt4r/Hxs2NB+BA6cTyLhJoNJF+EWg0ka4TaDSR3hDoNJIOEug0kj4R6DSSbhPoNJKeEBg0ks4SsGk17CQwaTZMIOg0k14RGDSTjhMYNJO+EJg0k+YZfBpKDwlMEkovCMwaSj8JzBJKWwx2BSU3jBYBJUeMlg0lR4xWCSVXjNYFJWeMNgEld4y2D7YQC3tsqqifoBy4CJS2wSStoSW4SStMQ2oVpZT71t/SXHRIDnewKkh5eOYejtrHoDCHyFy3EkvGk2iYcIYQs8ob8SQS85KTz14k8WYyD1Kgzc5+gt9fe89tv2XboiqVPsEUriFPuEkjbFAaEkTfGKUFKmOCSUhCk6hJIuxRGhJEtxTCipUpwQSqIUXUJJk+KUUJKkOCOUFCnOCSVBih6hpEdxQSjJUVwSSmoUV4SSGMU1oaRFcUMoSVHcElo/jUnR94H+COGb5zCVCQRyAB3X/Ct7uEEtlOomtVCiW9RCaW5TCze7HWqhiHapheLZoxaKZp9aKJYDaqFIXlELxXFILRRFh1oohiNqoQiOqYWLf0ItXPQutXCxT6mFi3xGLVzcc2rhovaohYt5QS1cxEtq4eJdUQsX7ZpauFg31MJFumXXq5xW5bLUkgFfMmkcF24pKn/1u3yYxAZd9aaRHGcT6aHd8aZY0nIoXEME5IgcN1RdXtYa0B0XjCBouwQNvwTaMEHDMYG2TNDwTKBNEzRcE2jbBA3fBNo4QcM5gbZO0PBOoM0TNNwTaPsEDf8E2kBBw0GBtlDQ8FCgTRQ0XBRoGwUNHwXaSEHDSYG2UtDwUqDNFDTcFGg7BQ0/BdpQQcNRgbZU0PBUoE0VNFwVaFsFDV8F2lhBw1mBtlbQ8FagzRU03BVoewUNfwXaYAFzWPhJAUuOLCbgTdIhFPGDep9p6EvfCyGFAquNakcClT6YqNLjyjZXXeez/O2sXyQz3dCFT0WFJI+KCEuec379WuHgQZc7/YaIugjWx0Zs+/LI2Jf4Sd29hNOzy3t25203k2RDiD82EN2hHolpLVyn6tT9WKdcRvEQqp593ajvvj4DtwmZBWNfqNdu/YnM9CcoKJw7bLzbmps+9T1WpyzewBCcfqbZ0q9AAjcd2880UQuBfobmdo79PPYDmNcv23QqYO499apjd3rd83fmdcXbad5IR7D3eTpN9mzOa3tj10xyNscNMi7m9rmbSxQQzusnaU0qkDRG1YpGERTN0CIbycS/p54WaPbDYpHp95vMQ7bFKHk8UaP/oJ4EuOxhZ85fbjrsLCzgpV/QHahGM77EX36Ba19krOf5wgJsZSXRqqEEepXFo8JP1AOp8TQr0KAK/0F4TzrfvXiiXuzRr6xPUvOCqshx/YV+sexJH+KY9bEPRJ96m1gAMeVT9d8D5jsk6gU35YJNUNZbvV2aTUJdM7UpjiSs6vAi84YZqHDT6C7KYRj5a423k7MiidVz/fms893zeQuZpaC49TZOTvV5L9q4XDF5C6O10PmuH6Uj+dBMndwv1MNh3DZ8lSzngHut8EPwotRLs8rQS7hf87bGmVDTkykDGIy9bfzsm8JXwhtk2d3asvM45yRXu3NW/B41XoT6BvB3f1Udfayj2idNRzxqD6nVit30/4/06KGgeurlvxhk3x9gnsXZdFCAf7es/4Diz+rnD/WfSyweXL5YW3+59s3pNyvfblZ/SvHZ0m+Wfrv09dL60h+Xvl3aX+ouXSwFS7D016W/Lf19/R/r/1z/1/q/TddPP6nO+fWS87P+3/8Bf5JncQ== h q AAAyKHiclVvbctvIEeVubhslm+wmj3lBRXbtJiWrLHsrl7fVXbIoiRJ1N70uEGyCsHAzZghKZjG/kNfkF/I1eUvta74kPTMYdA8EeSuqsoU5Z9DAzJyePgShYR5HQj5//v0nn/7oxz/56c8++/nSL375+a9+/cWXv7kQ2bQI4DzI4qy4GvoC4iiFcxnJGK7yAvxkGMPl8HZT8ZclFCLK0jN5n8ObxA/TaBwFvkTofFBO3r5/+8Xy89Xn+sd7eLBWHSx3qp/e2y/XPh+MsmCaQCqD2Bfi9drzXL6Z+4WMghgWS4OpgNwPbv0QXuNh6icg3sz13S68p4iMvHFW4L9UehrlZ8z9RIj7ZIg9E19ORJNTYBv3eirHf3kzj9J8KiENzIXG09iTmaeG7o2iAgIZ3+OBHxQR3qsXTPzCDyROkHOVYeKMYS4jHMBiaemp+vGOti+9w/WzPW9re2f/aP9s//io72lqqe1eV/C3GqlYUWGXnnqHfnHrCbwVXAHhZWMv8HNzrCalgDEURZSG6r5HURkJ220chdMC8E5TmAVZkvjpaD5AMIaxXMznA0i8r7t4/IfF4kGfAJcKCttrU7fa+hVROKmDnapGWy+Z5bbPWZa39RhmUmaJ7bShWw/6VeP2bTf/sR5D22P4WI/A9gge6zGyPUaqBy7DHo4uViP0fA/7K13AGNNo5OHcJG4MPFbg4vXaG4wyHHvLayoIRtnRi2JWDVUHK16czaB4FmBSri4NMKSeVhgvr83NAv5tgK25DtB2Ot5uJP141dtBMQiJOaXWXqgVQ95E3LERd5oRNS1nmb3m8ovqqsKznTwcUdV4Yc94P/VHdMryy+VvHpy2Up9jj17yUN/o4fSNqj86Hah8c/NVCjjz0RLATog5u2/P7recfWrP0jk/y+osW60nxlxd6Jmpc/CRqWkGnBQAzZAs3vLLhxFp1ljslw9j+6kHuAjq5JYpg/dmzLbL44N24kzzHApPxTFhtqsw221h1r3Cn9G8N4I9e/bML7No5E2F2pqisZdnQkRYZkzoPPYxdar4j9+d2nBzzKSWMSrGnF71+b8HWQXarANt/mAgHHMagt6DTV9hYmi4viOUiqVtqGfPHpUJ3p0fhxkWmEnSMk7kzN3VnT46UBbqwUjXbaj1llBW8PZ6OIg61sc3gzPnpPUfPOnBpOa4aVUjZ+pTqLlddfSxRTHnN9Xbq8/vuefbkdYXwLtWx4/ecCU4iGIl1lgd4IaOHdRRFW8cZ1mhaX1keH1YdUBqmMzXmtVGFpgIi/lAVf7Aj+dbzQ6lH0cj3uGtOS6SuaEWD0KCkO0naGZRjwhyoWpcLqI4S6v6dIohssQr/SLyMVutvkH6cxX5TqZZkWDUJwOEnizsdBYN2idm6DJDYgKXCYgZucyIGHAZIGbsMmNiQpcJiZm4zISYyGUiYt65zDtibl3mlpjYZeKFlnGReJHAjEUDPrpXm51ZwRXv3VRIb5SlX0lPeWGU473aeZyF8ZIqdurGTumqmctkxOQukxPz3mXeE1O4TEGMcBlBjHQZSczUZabElC5TEjNzmRkxdy5zR8y9y9wT88FlPiyMzbMJgJU5q7f3skqSuUml4ZilTX3fcmKyxPbQbcYzjsNDgllulAHBLDHKEcEsK0ogmKVEOSaY5UMZEsySoZwQzDKhnBLM0qB8RzDLgfKWYJYAZUxwzOCE4ITBbKL5DGcEMzGXOcFMyeV7gpmMy4JgpuFSECz4ohIs2+eES7ckmOm2nBHMRFveEcwUW94TzORafiDYanU7BvWZWn/aK1p0C0Z0rfsyGOW17sxg5Ne6N4PRYOvuDEaIrfszGDW27tBgJNm6R4PRZesujdyj+zQYhbbu1GBk2rpXg9Fqc7e2XOJyCece3YnBSLd1Lwaj39bdGIyIW/djMEpu3ZHByLl1Twaj6dZdGYywW/dlMOpu3ZnBSLx1bwaj89bdGYzYW/dnMIp/fIfGXCiioHYoyTrlxzqlTbJB8AaDNwneZPAWwVsM3iZ4m8E7BO8weJfgXQbvEbzH4H2C9xn8iuBXDD4g+IDBXYK7DD4k+JDBRwQfMfiY4GMG9wjuMfiE4BMGnxJ8yuA+wX0GnxF8xuBzgs8ZfEHwBYMvCb5k8BXBVwy+JviawTcE3zy+vbqiA6M6ptF1pl8tPcZtcG7T5TY5t+VyW5zbdrltzu243A7ndl1ul3N7LrfHuX2X2+fcK5d7xbkDlzvgXNflupw7dLlDzh253BHnjl3umHM9l+tx7sTlTjh36nKnnOu7XJ9zZy53xrlzlzvn3IXLXXDu0uUuOXflclecu3a5a87duJyV/QW3EOUH0J8j8LPr8/rcMkthbj/PWiyZGmiQUNEoRRQmfoXrY6KsXVaUa5XLCmbI0CBkUbRBQYSMibYliJAdKaubJBOiLQgiZD208UCEDIe2G4iQzdAmAxEyF9paIEKWQhsKRMhIaBuBSMymyCBkGrRlQCRlU2sQMgjaHiBCtkCbAkTIDGgrgEjBZt4ggk24Qajcl9WKsfUqDUKlXRd2RKig63KOCJVxXcQRoeKtSzcibUbVdailH+cTtd76dy3OcliJQ+vCgvQpjB5aVFTsJ8OROsMcEJElECpc/yZYq1Up1QIYEBH8nyAr3kq4FrbCrURbD2Q+5/c/V2K1LRRrQC0U6ogNaq4Ealso0DG1UJwhtVCYE2rh7bJ7RUG+oxaK8ZbNzVyJsB75XAnQtnAy2Syi+DI2JXMlOttC0b2nFgquYDM1V0KrJ2iuRGZbONFsmlFgJbVQXDNqobDuqIWiuqcWCurDovo6DEvwncF1+UWdUdnVRRcRKra61CJCJVYXWESosOqyigiVU11MEaEiqksoIlQ6deFEhAqmLpeIUJnURRIRKo66NCJCJVEXRESoEOoyiAiVP138EKGip0seIlTqdKFDhAqcLm+IUFnTRQ0RKma6lCFCJUwXMESocOmyhQiVK12sEKEipUsUIlSadGFChAqSLkeIUBnSRQiRG7aCVBeGvCwkvUm1EQ/wiM2eTX3FdKv0rwfHClDfFiBU0RmkQn2PvAVB7BeAopqsqx0Ir2h8oBhH6ikqpEE2itIQg/nTWCFiXB8ni7lQD4D7IB8LMMzi0Q+FGd4tMAmbD3FTob8+NCW1iqcfYFdDk8Z6poKpX25YjPQvNy1GGSC3LEY5ILctRlkgdyxGeSB3LUaZIPcsRrkg9y1G2SBfWYzyQR5YjDJCdi1GOSEPLUZZIY8sRnkhjy1GmSF7FqPckCcWo+yQpxaj/JB9i1GGyDOLUY7Ic4tRlsgLi1GeyEuLUabIK4tRrshri1G2yBuLGbOGQt4t/Hxi2NB+BA6cTyLhBoNJF+Emg0ka4RaDSR3hNoNJIOEOg0kj4S6DSSbhHoNJKeE+g0ks4SsGk17CAwaTZMIug0k14SGDSTjhEYNJO+Exg0k+YY/BpKDwhMEkovCUwaSjsM9gklJ4xmBSU3jOYBJUeMFg0lR4yWCSVXjFYFJWeM1gEld4w2D7YQC3tsqqifoBy5CJS2wQStoSm4SStMQWoVpZT70t/SXHVIDnewKkh5eOYeRtr3hDCHyFy0kkvFk2jUcIYQs8ob8SQS85LTz14k8WYyD1Kgzc5egt9fe89tv2HboiqVPsEkriFHuEkjbFPqEkTfGKUFKmOCCUhCm6hJIuxSGhJEtxRCipUhwTSqIUPUJJk+KEUJKkOCWUFCn6hJIgxRmhpEdxTijJUVwQSmoUl4SSGMUVoaRFcU0oSVHcEFo/jUnR94H+COGb5zCVCQRyAF3X/Ct7uE4tlOoGtVCim9RCaW5RCze7bWqhiHaoheLZpRaKZo9aKJZ9aqFIXlELxXFALRRFl1oohkNqoQiOqIWLf0wtXPQetXCxT6iFi3xKLVzcPrVwUc+ohYt5Ti1cxAtq4eJdUgsX7YpauFjX1MJFumHXq5xW5bLUkgFfMmkcF24pKn/1u3yYxAZd8WaRnGRT6aHd8WZY0nIoXEME5IgcN1RdXtYa0B0fGEHQdgkafgm0YYKGYwJtmaDhmUCbJmi4JtC2CRq+CbRxgoZzAm2doOGdQJsnaLgn0PYJGv4JtIGChoMCbaGg4aFAmyhouCjQNgoaPgq0kYKGkwJtpaDhpUCbKWi4KdB2Chp+CrShgoajAm2poOGpQJsqaLgq0LYKGr4KtLGChrMCba2g4a1AmytouCvQ9goa/gq0wQLmsPCTApYcWUzBm6YjKOJ79T7TyJe+F0IKBVYb1Y4EKn04VaXHlW2uui7m+dv5oEjmuqELn4oKSR4VEZY85/z6tcLhvS53+g0RdRGsj43Y9uWRiS/xk7p7Cadnj/fsLdpuJslGEH9sILpDPRLTenCdqlPvY51yGcUjqHoOdKO++/oM3CZkFkx8oV679acy05+goHDusPFua2761PdYnfLwBkbg9DPNln4FErjp2H6miVoI9DM0t3Ps57EfwKJ+2aZbAQvvqVcdu9Prnr+9qCvedvNGuoK9z9NtsqcLXtsbu2aSszlukHGxsM/dXKKAcFE/SWtSgaQxqlY0jqBohhbZWCb+HfW0QLMfFotMv99kHrI9jJLHUzX6D+pJgMsedBf85aaD7oMFvPALugPVaMaX+MsvcO2LjPXsP1iAzawkWjWUQC+zeFz4iXogNZllBRpU4d8L70n3uxdP1Is9+pX1aWpeUBU5rr/QL5Y9GUAcsz72gehTbwMLIKZ8qv67x3yHRL3gplywCcp6q7dLs2moa6Y2xZGEFR1eZN4oAxVuFt1GOYwif7XxdnJWJLF6rr+Yd797vmghsxQUt9bGyZk+70Ublysmb2G0FrrfDaJ0LO+bqZP7hXo4jNuGr5KlD7jXCj8EL0q9NKsMvYS7VW9zkgk1PZkygMHE28LPvil8Jbxhlt2uLjmPc45ztTtnxR9R40WobwB/D1bU0cc6qn3SdMSj9pBardhN//9IjzMU1Jl6+S8GOfCHmGdxNhsW4N8u6T+g+Kv6+VP95xIPDy5erK69XP3m5JvlbzeqP6X4rPO7zu87X3fWOn/ufNvZ6/Q6552gE3X+3vlH559r/1r799p/1r43XT/9pDrntx3nZ+2//wM0qWlL h f AAAyKHiclVvbctvIEeVubhslm+wmj3lBRXbtJiWrLHsrl7fVXbIoiRJ1N70uEGyCsHAzZghKZjG/kNfkF/I1eUvta74kPTMYdA8EeSuqsoU5Z9DAzJyePgShYR5HQj5//v0nn/7oxz/56c8++/nSL375+a9+/cWXv7kQ2bQI4DzI4qy4GvoC4iiFcxnJGK7yAvxkGMPl8HZT8ZclFCLK0jN5n8ObxA/TaBwFvkTofFBO3o7ffrH8fPW5/vEeHqxVB8ud6qf39su1zwejLJgmkMog9oV4vfY8l2/mfiGjIIbF0mAqIPeDWz+E13iY+gmIN3N9twvvKSIjb5wV+C+Vnkb5GXM/EeI+GWLPxJcT0eQU2Ma9nsrxX97MozSfSkgDc6HxNPZk5qmhe6OogEDG93jgB0WE9+oFE7/wA4kT5FxlmDhjmMsIB7BYWnqqfryj7UvvcP1sz9va3tk/2j/bPz7qe5paarvXFfytRipWVNilp96hX9x6Am8FV0B42dgL/Nwcq0kpYAxFEaWhuu9RVEbCdhtH4bQAvNMUZkGWJH46mg8QjGEsF/P5ABLv6y4e/2GxeNAnwKWCwvba1K22fkUUTupgp6rR1ktmue1zluVtPYaZlFliO23o1oN+1bh9281/rMfQ9hg+1iOwPYLHeoxsj5Hqgcuwh6OL1Qg938P+ShcwxjQaeTg3iRsDjxW4eL32BqMMx97ymgqCUXb0ophVQ9XBihdnMyieBZiUq0sDDKmnFcbLa3OzgH8bYGuuA7SdjrcbST9e9XZQDEJiTqm1F2rFkDcRd2zEnWZETctZZq+5/KK6qvBsJw9HVDVe2DPeT/0RnbL8cvmbB6et1OfYo5c81Dd6OH2j6o9OByrf3HyVAs58tASwE2LO7tuz+y1nn9qzdM7PsjrLVuuJMVcXembqHHxkapoBJwVAMySLt/zyYUSaNRb75cPYfuoBLoI6uWXK4L0Zs+3y+KCdONM8h8JTcUyY7SrMdluYda/wZzTvjWDPnj3zyywaeVOhtqZo7OWZEBGWGRM6j31MnSr+43enNtwcM6lljIoxp1d9/u9BVoE260CbPxgIx5yGoPdg01eYGBqu7wilYmkb6tmzR2WCd+fHYYYFZpK0jBM5c3d1p48OlIV6MNJ1G2q9JZQVvL0eDqKO9fHN4Mw5af0HT3owqTluWtXImfoUam5XHX1sUcz5TfX26vN77vl2pPUF8K7V8aM3XAkOoliJNVYHuKFjB3VUxRvHWVZoWh8ZXh9WHZAaJvO1ZrWRBSbCYj5QlT/w4/lWs0Ppx9GId3hrjotkbqjFg5AgZPsJmlnUI4JcqBqXiyjO0qo+nWKILPFKv4h8zFarb5D+XEW+k2lWJBj1yQChJws7nUWD9okZusyQmMBlAmJGLjMiBlwGiBm7zJiY0GVCYiYuMyEmcpmImHcu846YW5e5JSZ2mXihZVwkXiQwY9GAj+7VZmdWcMV7NxXSG2XpV9JTXhjleK92HmdhvKSKnbqxU7pq5jIZMbnL5MS8d5n3xBQuUxAjXEYQI11GEjN1mSkxpcuUxMxcZkbMncvcEXPvMvfEfHCZDwtj82wCYGXO6u29rJJkblJpOGZpU9+3nJgssT10m/GM4/CQYJYbZUAwS4xyRDDLihIIZilRjglm+VCGBLNkKCcEs0wopwSzNCjfEcxyoLwlmCVAGRMcMzghOGEwm2g+wxnBTMxlTjBTcvmeYCbjsiCYabgUBAu+qATL9jnh0i0JZrotZwQz0ZZ3BDPFlvcEM7mWHwi2Wt2OQX2m1p/2ihbdghFd674MRnmtOzMY+bXuzWA02Lo7gxFi6/4MRo2tOzQYSbbu0WB02bpLI/foPg1Goa07NRiZtu7VYLTa3K0tl7hcwrlHd2Iw0m3di8Hot3U3BiPi1v0YjJJbd2Qwcm7dk8FounVXBiPs1n0ZjLpbd2YwEm/dm8HovHV3BiP21v0ZjOIf36ExF4ooqB1Ksk75sU5pk2wQvMHgTYI3GbxF8BaDtwneZvAOwTsM3iV4l8F7BO8xeJ/gfQa/IvgVgw8IPmBwl+Augw8JPmTwEcFHDD4m+JjBPYJ7DD4h+ITBpwSfMrhPcJ/BZwSfMfic4HMGXxB8weBLgi8ZfEXwFYOvCb5m8A3BN49vr67owKiOaXSd6VdLj3EbnNt0uU3ObbncFue2XW6bczsut8O5XZfb5dyey+1xbt/l9jn3yuVece7A5Q4413W5LucOXe6Qc0cud8S5Y5c75lzP5XqcO3G5E86dutwp5/ou1+fcmcudce7c5c45d+FyF5y7dLlLzl253BXnrl3umnM3Lmdlf8EtRPkB9OcI/Oz6vD63zFKY28+zFkumBhokVDRKEYWJX+H6mChrlxXlWuWyghkyNAhZFG1QECFjom0JImRHyuomyYRoC4IIWQ9tPBAhw6HtBiJkM7TJQITMhbYWiJCl0IYCETIS2kYgErMpMgiZBm0ZEEnZ1BqEDIK2B4iQLdCmABEyA9oKIFKwmTeIYBNuECr3ZbVibL1Kg1Bp14UdESroupwjQmVcF3FEqHjr0o1Im1F1HWrpx/lErbf+XYuzHFbi0LqwIH0Ko4cWFRX7yXCkzjAHRGQJhArXvwnWalVKtQAGRAT/J8iKtxKuha1wK9HWA5nP+f3PlVhtC8UaUAuFOmKDmiuB2hYKdEwtFGdILRTmhFp4u+xeUZDvqIVivGVzM1cirEc+VwK0LZxMNosovoxNyVyJzrZQdO+phYIr2EzNldDqCZorkdkWTjSbZhRYSS0U14xaKKw7aqGo7qmFgvqwqL4OwxJ8Z3BdflFnVHZ10UWEiq0utYhQidUFFhEqrLqsIkLlVBdTRKiI6hKKCJVOXTgRoYKpyyUiVCZ1kUSEiqMujYhQSdQFEREqhLoMIkLlTxc/RKjo6ZKHCJU6XegQoQKnyxsiVNZ0UUOEipkuZYhQCdMFDBEqXLpsIULlShcrRKhI6RKFCJUmXZgQoYKkyxEiVIZ0EULkhq0g1YUhLwtJb1JtxAM8YrNnU18x3Sr968GxAtS3BQhVdAapUN8jb0EQ+wWgqCbragfCKxofKMaReooKaZCNojTEYP40VogY18fJYi7UA+A+yMcCDLN49ENhhncLTMLmQ9xU6K8PTUmt4ukH2NXQpLGeqWDqlxsWI/3LTYtRBsgti1EOyG2LURbIHYtRHshdi1EmyD2LUS7IfYtRNshXFqN8kAcWo4yQXYtRTshDi1FWyCOLUV7IY4tRZsiexSg35InFKDvkqcUoP2TfYpQh8sxilCPy3GKUJfLCYpQn8tJilCnyymKUK/LaYpQt8sZixqyhkHcLP58YNrQfgQPnk0i4wWDSRbjJYJJGuMVgUke4zWASSLjDYNJIuMtgkkm4x2BSSrjPYBJL+IrBpJfwgMEkmbDLYFJNeMhgEk54xGDSTnjMYJJP2GMwKSg8YTCJKDxlMOko7DOYpBSeMZjUFJ4zmAQVXjCYNBVeMphkFV4xmJQVXjOYxBXeMNh+GMCtrbJqon7AMmTiEhuEkrbEJqEkLbFFqFbWU29Lf8kxFeD5ngDp4aVjGHnbK94QAl/hchIJb5ZN4xFC2AJP6K9E0EtOC0+9+JPFGEi9CgN3OXpL/T2v/bZ9h65I6hS7hJI4xR6hpE2xTyhJU7wilJQpDgglYYouoaRLcUgoyVIcEUqqFMeEkihFj1DSpDghlCQpTgklRYo+oSRIcUYo6VGcE0pyFBeEkhrFJaEkRnFFKGlRXBNKUhQ3hNZPY1L0faA/QvjmOUxlAoEcQNc1/8oerlMLpbpBLZToJrVQmlvUws1um1oooh1qoXh2qYWi2aMWimWfWiiSV9RCcRxQC0XRpRaK4ZBaKIIjauHiH1MLF71HLVzsE2rhIp9SCxe3Ty1c1DNq4WKeUwsX8YJauHiX1MJFu6IWLtY1tXCRbtj1KqdVuSy1ZMCXTBrHhVuKyl/9Lh8msUFXvFkkJ9lUemh3vBmWtBwK1xABOSLHDVWXl7UGdMcHRhC0XYKGXwJtmKDhmEBbJmh4JtCmCRquCbRtgoZvAm2coOGcQFsnaHgn0OYJGu4JtH2Chn8CbaCg4aBAWyhoeCjQJgoaLgq0jYKGjwJtpKDhpEBbKWh4KdBmChpuCrSdgoafAm2ooOGoQFsqaHgq0KYKGq4KtK2Chq8Cbayg4axAWytoeCvQ5goa7gq0vYKGvwJtsIA5LPykgCVHFlPwpukIivhevc808qXvhZBCgdVGtSOBSh9OVelxZZurrot5/nY+KJK5bujCp6JCkkdFhCXPOb9+rXB4r8udfkNEXQTrYyO2fXlk4kv8pO5ewunZ4z17i7abSbIRxB8biO5Qj8S0Hlyn6tT7WKdcRvEIqp4D3ajvvj4DtwmZBRNfqNdu/anM9CcoKJw7bLzbmps+9T1Wpzy8gRE4/UyzpV+BBG46tp9pohYC/QzN7Rz7eewHsKhftulWwMJ76lXH7vS6528v6oq33byRrmDv83Sb7OmC1/bGrpnkbI4bZFws7HM3lyggXNRP0ppUIGmMqhWNIyiaoUU2lol/Rz0t0OyHxSLT7zeZh2wPo+TxVI3+g3oS4LIH3QV/uemg+2ABL/yC7kA1mvEl/vILXPsiYz37DxZgMyuJVg0l0MssHhd+oh5ITWZZgQZV+PfCe9L97sUT9WKPfmV9mpoXVEWO6y/0i2VPBhDHrI99IPrU28ACiCmfqv/uMd8hUS+4KRdsgrLe6u3SbBrqmqlNcSRhRYcXmTfKQIWbRbdRDqPIX228nZwVSaye6y/m3e+eL1rILAXFrbVxcqbPe9HG5YrJWxithe53gygdy/tm6uR+oR4O47bhq2TpA+61wg/Bi1IvzSpDL+Fu1ducZEJNT6YMYDDxtvCzbwpfCW+YZberS87jnONc7c5Z8UfUeBHqG8DfgxV19LGOap80HfGoPaRWK3bT/z/S4wwFdaZe/otBDvwh5lmczYYF+LdL+g8o/qp+/lT/ucTDg4sXq2svV785+Wb5243qTyk+6/yu8/vO1521zp8733b2Or3OeSfoRJ2/d/7R+efav9b+vfafte9N108/qc75bcf5Wfvv/wARS2lA G AAAyJHiclVvLctvIFdVMXhMlk8wky2xQkV0zSckqy57KYzd6SxYlURL1ND0uELwEYeFldBOUzGJ+INvkF/I12aWyyCbfktvdaNzbIOSpqMoW+pzGBbr73L6HIDTI40jI58//88mnP/jhj378k89+uvyzn3/+i19+8eWvLkU2KQK4CLI4K64HvoA4SuFCRjKG67wAPxnEcDW421L8VQmFiLK0Jx9yeJP4YRqNosCXCJ3uvf1i5fnac/3jLR6sVwcrS9VP9+2X65/3h1kwSSCVQewL8Xr9eS7fzPxCRkEM8+X+REDuB3d+CK/xMPUTEG9m+k7n3lNEht4oK/BfKj2N8jNmfiLEQzLAnokvx6LJKbCNez2Roz+9mUVpPpGQBuZCo0nsycxTw/aGUQGBjB/wwA+KCO/VC8Z+4QcSJ8e5yiBxxjCTEQ5gvrz8VP14xztX3tFGb9/b3tk9OD7oHZwcn3uaWm6711X8rUYqVlXY5afekV/ceQJvBWdfeNnIC/zcHKtJKWAERRGlobrvYVRGwnYbReGkALzTFKZBliR+Opz1EYxhJOezWR8S7+sOHv9uPl/oE+BSQWF7belWW78iCsd1sDPVaOsls9z26WV5W49BJmWW2E6burXQrxq3b7v5j/UY2B6Dx3oEtkfwWI+h7TFUPXAZ9nF0sRqh53vYX+kCRphCQw/nJnFj4LEC56/X32CUwchbWVdBMMquXhSzaqg6WPXibArFswATcm25jyH1tMJoZX1mFvAvfWzNdIC20/F2I+nHa94uikFIzCm19kKtGPIm4q6NuNuMqGk5zew1V15UVxWe7eThiKrGC3vG+4k/pFNWXq58s3Daan2OPXrJQ32jh3NuVP3R6UDlm5uvUsCZj5YAdkLM2ef27POWs8/sWTrnp1mdZWv1xJirCz0zdQ4+MjXNgOMCoBmSxVt5uRiRZo3FfrkY2089wEVQJ7dMGbw3Y7ZdHh+0E2eS51B4Ko4Js1OF2WkLs+EV/pTmvRHs2bNnfplFQ28i1NYUjbw8EyLCEmNC57GPqVPFf/zu1IabYya1jFEx5vSqz/89yCrQVh1o63sD4ZjTEPQebPoKE0PD9R2hVCxtQz179qhM8O78OMywwIyTlnEiZ+6u7vTRgbJQCyPdsKE2WkJZwdvr4SDqWB/fDHrOSRvfe9LCpOa4aVUjZ+pTqLlddfSxRTHnN9Xbrc/vuufbkdYXwLtWx4/ecCU4iGIl1lgd4IaOHdRRFW8UZ1mhaX1keH1YdUBqkMzWm9VGFpgI81lfVf7Aj2fbzQ6lH0dD3uGtOS6SmaHmCyFByPYTNDOvRwS5UDUuF1GcpVV9OsMQWeKVfhH5mK1W3yD9mYp8L9OsSDDqkz5CT+Z2OosG7RMzcJkBMYHLBMQMXWZIDLgMEDNymRExocuExIxdZkxM5DIRMe9c5h0xdy5zR0zsMvFcy7hIvEhgxqL5Hj6ozc6s4Kr3biKkN8zSr6SnvDDK8UHtPM7CeEkVO3Vjp3TVzGUyYnKXyYl57zLviSlcpiBGuIwgRrqMJGbiMhNiSpcpiZm6zJSYe5e5J+bBZR6I+eAyH+bG5tkEwMqc1dt7WSXJzKTSYMTSpr5vOTZZYnvoNuMZx+EBwSw3yoBglhjlkGCWFSUQzFKiHBHM8qEMCWbJUI4JZplQTghmaVC+I5jlQHlHMEuAMiY4ZnBCcMJgNtF8hjOCmZjLnGCm5PI9wUzGZUEw03ApCBZ8UQmW7XPCpVsSzHRbTglmoi3vCWaKLR8IZnItPxBstboTg/pMrT/tFS26BSO61n0ZjPJad2Yw8mvdm8FosHV3BiPE1v0ZjBpbd2gwkmzdo8HosnWXRu7RfRqMQlt3ajAybd2rwWi1uVtbLnG5hHOP7sRgpNu6F4PRb+tuDEbErfsxGCW37shg5Ny6J4PRdOuuDEbYrfsyGHW37sxgJN66N4PReevuDEbsrfszGMU/vkNjLhRRUDuUZIPyY4PSJtkkeJPBWwRvMXib4G0G7xC8w+BdgncZvEfwHoP3Cd5n8AHBBwx+RfArBh8SfMjgDsEdBh8RfMTgY4KPGXxC8AmDuwR3GXxK8CmDzwg+Y/A5wecM7hHcY/AFwRcMviT4ksFXBF8x+JrgawbfEHzD4FuCbx/fXl3RgVEd0+gG06+WHuM2Obflcluc23a5bc7tuNwO53Zdbpdzey63x7l9l9vn3IHLHXDulcu94tyhyx1yruNyHc4dudwR545d7phzJy53wrmuy3U5d+pyp5w7c7kzzp273Dnnei7X49yFy11w7tLlLjl35XJXnLt2uWvO3bjcDeduXc7K/pJbiPID6M8R+Nn1eX1umaUws59nLZZMDNRPqGiUIgoTv8L1MVHWLivKtcplBTNkYBCyKNqgIELGRNsSRMiOlNVNkgnRFgQRsh7aeCBChkPbDUTIZmiTgQiZC20tECFLoQ0FImQktI1AJGZTZBAyDdoyIJKyqTUIGQRtDxAhW6BNASJkBrQVQKRgM28QwSbcIFTuy2rF2HqVBqHSrgs7IlTQdTlHhMq4LuKIUPHWpRuRNqPqOtTSj/OxWm/9uxZnOajEoXVhQfoURg8tKir2k8FQnWEOiMgSCBWufxOs1aqUagEMiAj+T5AVbyVcC1vhVqKtBzKb8fufKbHaFoo1oBYKdcgGNVMCtS0U6IhaKM6QWijMMbXwdtm9oiDfUQvFeMfmZqZEWI98pgRoWziZbBZRfBmbkpkSnW2h6N5TCwVXsJmaKaHVEzRTIrMtnGg2zSiwkloorim1UFj31EJRPVALBfVhXn0dhiX43uC6/KLOqOzqoosIFVtdahGhEqsLLCJUWHVZRYTKqS6miFAR1SUUESqdunAiQgVTl0tEqEzqIokIFUddGhGhkqgLIiJUCHUZRITKny5+iFDR0yUPESp1utAhQgVOlzdEqKzpooYIFTNdyhChEqYLGCJUuHTZQoTKlS5WiFCR0iUKESpNujAhQgVJlyNEqAzpIoTILVtBqgsDXhaS7rjaiPt4xGbPpr5iOlX614NjBejcFiBUUQ9Sob5H3oYg9gtAUY031A6EVzQ+UIwi9RQV0iAbRmmIwfxJrBAxqo+T+UyoB8DnIB8LMMji4feFGdzPMQmbD3FTob8+NCW1iqcfYFdDk8Z6poKpX25ajPQvtyxGGSC3LUY5IHcsRlkgdy1GeSD3LEaZIPctRrkgDyxG2SBfWYzyQR5ajDJCdixGOSGPLEZZIY8tRnkhTyxGmSG7FqPckKcWo+yQZxaj/JDnFqMMkT2LUY7IC4tRlshLi1GeyCuLUabIa4tRrsgbi1G2yFuLGbOGQt4r/Hxs2NB+BA6cTyLhJoNJF+EWg0ka4TaDSR3hDoNJIOEug0kj4R6DSSbhPoNJKeEBg0ks4SsGk17CQwaTZMIOg0k14RGDSTjhMYNJO+EJg0k+YZfBpKDwlMEkovCMwaSj8JzBJKWwx2BSU3jBYBJUeMlg0lR4xWCSVXjNYFJWeMNgEld4y2D7YQC3tsqqifoBy4CJS2wSStoSW4SStMQ2oVpZT71t/SXHRIDnewKkh5eOYejtrHoDCHyFy3EkvGk2iYcIYQs8ob8SQS85KTz14k8WYyD1Kgzc5+gt9fe89tv2XboiqVPsEUriFPuEkjbFAaEkTfGKUFKmOCSUhCk6hJIuxRGhJEtxTCipUpwQSqIUXUJJk+KUUJKkOCOUFCnOCSVBih6hpEdxQSjJUVwSSmoUV4SSGMU1oaRFcUMoSVHcElo/jUnR94H+COGb5zCVCQRyAB3X/Ct7uEEtlOomtVCiW9RCaW5TCze7HWqhiHapheLZoxaKZp9aKJYDaqFIXlELxXFILRRFh1oohiNqoQiOqYWLf0ItXPQutXCxT6mFi3xGLVzcc2rhovaohYt5QS1cxEtq4eJdUQsX7ZpauFg31MJFumXXq5xW5bLUkgFfMmkcF24pKn/1u3yYxAZd9aaRHGcT6aHd8aZY0nIoXEME5IgcN1RdXtYa0B0XjCBouwQNvwTaMEHDMYG2TNDwTKBNEzRcE2jbBA3fBNo4QcM5gbZO0PBOoM0TNNwTaPsEDf8E2kBBw0GBtlDQ8FCgTRQ0XBRoGwUNHwXaSEHDSYG2UtDwUqDNFDTcFGg7BQ0/BdpQQcNRgbZU0PBUoE0VNFwVaFsFDV8F2lhBw1mBtlbQ8FagzRU03BVoewUNfwXaYAFzWPhJAUuOLCbgTdIhFPGDep9p6EvfCyGFAquNakcClT6YqNLjyjZXXeez/O2sXyQz3dCFT0WFJI+KCEuec379WuHgQZc7/YaIugjWx0Zs+/LI2Jf4Sd29hNOzy3t25203k2RDiD82EN2hHolpLVyn6tT9WKdcRvEQqp593ajvvj4DtwmZBWNfqNdu/YnM9CcoKJw7bLzbmps+9T1WpyzewBCcfqbZ0q9AAjcd2880UQuBfobmdo79PPYDmNcv23QqYO499apjd3rd83fmdcXbad5IR7D3eTpN9mzOa3tj10xyNscNMi7m9rmbSxQQzusnaU0qkDRG1YpGERTN0CIbycS/p54WaPbDYpHp95vMQ7bFKHk8UaP/oJ4EuOxhZ85fbjrsLCzgpV/QHahGM77EX36Ba19krOf5wgJsZSXRqqEEepXFo8JP1AOp8TQr0KAK/0F4TzrfvXiiXuzRr6xPUvOCqshx/YV+sexJH+KY9bEPRJ96m1gAMeVT9d8D5jsk6gU35YJNUNZbvV2aTUJdM7UpjiSs6vAi84YZqHDT6C7KYRj5a423k7MiidVz/fms893zeQuZpaC49TZOTvV5L9q4XDF5C6O10PmuH6Uj+dBMndwv1MNh3DZ8lSzngHut8EPwotRLs8rQS7hf87bGmVDTkykDGIy9bfzsm8JXwhtk2d3asvM45yRXu3NW/B41XoT6BvB3f1Udfayj2idNRzxqD6nVit30/4/06KGgeurlvxhk3x9gnsXZdFCAf7es/4Diz+rnD/WfSyweXL5YW3+59s3pNyvfblZ/SvHZ0m+Wfrv09dL60h+Xvl3aX+ouXSwFS7D016W/Lf19/R/r/1z/1/q/TddPP6nO+fWS87P+3/8BMaVnYA== T AAAyJHiclVvLctvIFeVMXhMlk8wky2xQkV0zSckqy57KYzd6SxYlUSL1tDwuELwEYeFldBOUzGJ+INvkF/I12aWyyCbfktvdaNzbEOSpqMoW+pzGBbr73L6HIDTM40jI58//88mnP/jhj378k89+uvSzn3/+i19+8eWvzkU2LQI4C7I4Ky6HvoA4SuFMRjKGy7wAPxnGcDG83VT8RQmFiLJ0IO9zeJP4YRqNo8CXCJ0M3n6x/Hz1uf7xHh6sVQfLneqn9/bLtc9vRlkwTSCVQewL8XrteS7fzP1CRkEMi6WbqYDcD279EF7jYeonIN7M9Z0uvKeIjLxxVuC/VHoa5WfM/USI+2SIPRNfTkSTU2Ab93oqx396M4/SfCohDcyFxtPYk5mnhu2NogICGd/jgR8UEd6rF0z8wg8kTo5zlWHijGEuIxzAYmnpqfrxjrYvvMP1wZ63tb2zf7Q/2D8+6nuaWmq71xX8rUYqVlTYpafeoV/cegJvBWdfeNnYC/zcHKtJKWAMRRGlobrvUVRGwnYbR+G0ALzTFGZBliR+OprfIBjDWC7m8xtIvK+7ePy7xeJBnwCXCgrba1O32voVUTipg52qRlsvmeW2zyDL23oMMymzxHba0K0H/apx+7ab/1iPoe0xfKxHYHsEj/UY2R4j1QOXYQ9HF6sRer6H/ZUuYIwpNPJwbhI3Bh4rcPF67Q1GGY695TUVBKPs6EUxq4aqgxUvzmZQPAswIVeXbjCknlYYL6/NzQL+5QZbcx2g7XS83Uj68aq3g2IQEnNKrb1QK4a8ibhjI+40I2pazjJ7zeUX1VWFZzt5OKKq8cKe8X7qj+iU5ZfL3zw4baU+xx695KG+0cPpG1V/dDpQ+ebmqxRw5qMlgJ0Qc3bfnt1vOfvUnqVzfpbVWbZaT4y5utAzU+fgI1PTDDgpAJohWbzllw8j0qyx2C8fxvZTD3AR1MktUwbvzZhtl8cH7cSZ5jkUnopjwmxXYbbbwqx7hT+jeW8Ee/bsmV9m0cibCrU1RWMvz4SIsMSY0HnsY+pU8R+/O7Xh5phJLWNUjDm96vN/D7IKtFkH2vzeQDjmNAS9B5u+wsTQcH1HKBVL21DPnj0qE7w7Pw4zLDCTpGWcyJm7qzt9dKAs1IORrttQ6y2hrODt9XAQdayPbwYD56T17z3pwaTmuGlVI2fqU6i5XXX0sUUx5zfV26vP77nn25HWF8C7VseP3nAlOIhiJdZYHeCGjh3UURVvHGdZoWl9ZHh9WHVAapjM15rVRhaYCIv5jar8gR/Pt5odSj+ORrzDW3NcJHNDLR6EBCHbT9DMoh4R5ELVuFxEcZZW9ekUQ2SJV/pF5GO2Wn2D9Ocq8p1MsyLBqE9uEHqysNNZNGifmKHLDIkJXCYgZuQyI2LAZYCYscuMiQldJiRm4jITYiKXiYh55zLviLl1mVtiYpeJF1rGReJFAjMWzffoXm12ZgVXvHdTIb1Rln4lPeWFUY73audxFsZLqtipGzulq2YukxGTu0xOzHuXeU9M4TIFMcJlBDHSZSQxU5eZElO6TEnMzGVmxNy5zB0x9y5zT8wHl/mwMDbPJgBW5qze3ssqSeYmlYZjljb1fcuJyRLbQ7cZzzgODwlmuVEGBLPEKEcEs6wogWCWEuWYYJYPZUgwS4ZyQjDLhHJKMEuD8h3BLAfKW4JZApQxwTGDE4ITBrOJ5jOcEczEXOYEMyWX7wlmMi4LgpmGS0Gw4ItKsGyfEy7dkmCm23JGMBNteUcwU2x5TzCTa/mBYKvV7RjUZ2r9aa9o0S0Y0bXuy2CU17ozg5Ff694MRoOtuzMYIbbuz2DU2LpDg5Fk6x4NRpetuzRyj+7TYBTaulODkWnrXg1Gq83d2nKJyyWce3QnBiPd1r0YjH5bd2MwIm7dj8EouXVHBiPn1j0ZjKZbd2Uwwm7dl8Gou3VnBiPx1r0ZjM5bd2cwYm/dn8Eo/vEdGnOhiILaoSTrlB/rlDbJBsEbDN4keJPBWwRvMXib4G0G7xC8w+BdgncZvEfwHoP3Cd5n8CuCXzH4gOADBncJ7jL4kOBDBh8RfMTgY4KPGdwjuMfgE4JPGHxK8CmD+wT3GTwgeMDgM4LPGHxO8DmDLwi+YPAlwZcMviL4isHXBF8/vr26ogOjOqbRdaZfLT3GbXBu0+U2Obflcluc23a5bc7tuNwO53Zdbpdzey63x7l9l9vn3CuXe8W5A5c74FzX5bqcO3S5Q84dudwR545d7phzPZfrce7E5U44d+pyp5zru1yfcwOXG3DuzOXOOHfucuecu3C5C85dutwl565c7opz1y5nZX/OLUT5AfTnCPzs+rw+t8xSmNvPsxZLpga6SaholCIKE7/C9TFR1i4ryrXKZQUzZGgQsijaoCBCxkTbEkTIjpTVTZIJ0RYEEbIe2nggQoZD2w1EyGZok4EImQttLRAhS6ENBSJkJLSNQCRmU2QQMg3aMiCSsqk1CBkEbQ8QIVugTQEiZAa0FUCkYDNvEMEm3CBU7stqxdh6lQah0q4LOyJU0HU5R4TKuC7iiFDx1qUbkTaj6jrU0o/ziVpv/bsWZzmsxKF1YUH6FEYPLSoq9pPhSJ1hDojIEggVrn8TrNWqlGoBDIgI/k+QFW8lXAtb4VairQcyn/P7nyux2haKNaAWCnXEBjVXArUtFOiYWijOkFoozAm18HbZvaIg31ELxXjL5mauRFiPfK4EaFs4mWwWUXwZm5K5Ep1toejeUwsFV7CZmiuh1RM0VyKzLZxoNs0osJJaKK4ZtVBYd9RCUd1TCwX1YVF9HYYl+M7guvyizqjs6qKLCBVbXWoRoRKrCywiVFh1WUWEyqkupohQEdUlFBEqnbpwIkIFU5dLRKhM6iKJCBVHXRoRoZKoCyIiVAh1GUSEyp8ufohQ0dMlDxEqdbrQIUIFTpc3RKis6aKGCBUzXcoQoRKmCxgiVLh02UKEypUuVohQkdIlChEqTbowIUIFSZcjRKgM6SKEyDVbQaoLQ14Wkt6k2ohv8IjNnk19xXSr9K8HxwpQ3xYgVNEAUqG+R96CIPYLQFFN1tUOhFc0PlCMI/UUFdIgG0VpiMH8aawQMa6Pk8VcqAfAfZCPBRhm8ej7wgzvFpiEzYe4qdBfH5qSWsXTD7CroUljPVPB1C83LEb6l5sWowyQWxajHJDbFqMskDsWozyQuxajTJB7FqNckPsWo2yQryxG+SAPLEYZIbsWo5yQhxajrJBHFqO8kMcWo8yQPYtRbsgTi1F2yFOLUX7IvsUoQ+TAYpQj8sxilCXy3GKUJ/LCYpQp8tJilCvyymKULfLaYsasoZB3Cz+fGDa0H4ED55NIuMFg0kW4yWCSRrjFYFJHuM1gEki4w2DSSLjLYJJJuMdgUkq4z2ASS/iKwaSX8IDBJJmwy2BSTXjIYBJOeMRg0k54zGCST9hjMCkoPGEwiSg8ZTDpKOwzmKQUDhhMagrPGEyCCs8ZTJoKLxhMsgovGUzKCq8YTOIKrxlsPwzg1lZZNVE/YBkycYkNQklbYpNQkpbYIlQr66m3pb/kmArwfE+A9PDSMYy87RVvCIGvcDmJhDfLpvEIIWyBJ/RXIuglp4WnXvzJYgykXoWBuxy9pf6e137bvkNXJHWKXUJJnGKPUNKm2CeUpCleEUrKFAeEkjBFl1DSpTgklGQpjgglVYpjQkmUokcoaVKcEEqSFKeEkiJFn1ASpBgQSnoUZ4SSHMU5oaRGcUEoiVFcEkpaFFeEkhTFNaH105gUfR/ojxC+eQ5TmUAgB9B1zb+yh+vUQqluUAslukktlOYWtXCz26YWimiHWiieXWqhaPaohWLZpxaK5BW1UBwH1EJRdKmFYjikForgiFq4+MfUwkXvUQsX+4RauMin1MLF7VMLF3VALVzMM2rhIp5TCxfvglq4aJfUwsW6ohYu0jW7XuW0Kpellgz4kknjuHBLUfmr3+XDJDboijeL5CSbSg/tjjfDkpZD4RoiIEfkuKHq8rLWgO74wAiCtkvQ8EugDRM0HBNoywQNzwTaNEHDNYG2TdDwTaCNEzScE2jrBA3vBNo8QcM9gbZP0PBPoA0UNBwUaAsFDQ8F2kRBw0WBtlHQ8FGgjRQ0nBRoKwUNLwXaTEHDTYG2U9DwU6ANFTQcFWhLBQ1PBdpUQcNVgbZV0PBVoI0VNJwVaGsFDW8F2lxBw12BtlfQ8FegDRYwh4WfFLDkyGIK3jQdQRHfq/eZRr70vRBSKLDaqHYkUOnDqSo9rmxz1XUxz9/Ob4pkrhu68KmokORREWHJc86vXysc3utyp98QURfB+tiIbV8emfgSP6m7l3B69njP3qLtZpJsBPHHBqI71CMxrQfXqTr1PtYpl1E8gqrnjW7Ud1+fgduEzIKJL9Rrt/5UZvoTFBTOHTbebc1Nn/oeq1Me3sAInH6m2dKvQAI3HdvPNFELgX6G5naO/Tz2A1jUL9t0K2DhPfWqY3d63fO3F3XF227eSFew93m6TfZ0wWt7Y9dMcjbHDTIuFva5m0sUEC7qJ2lNKpA0RtWKxhEUzdAiG8vEv6OeFmj2w2KR6febzEO2h1HyeKpG/0E9CXDZg+6Cv9x00H2wgOd+QXegGs34En/5Ba59kbGe/QcLsJmVRKuGEuhFFo8LP1EPpCazrECDKvx74T3pfvfiiXqxR7+yPk3NC6oix/UX+sWyJzcQx6yPfSD61NvAAogpn6r/7jHfIVEvuCkXbIKy3urt0mwa6pqpTXEkYUWHF5k3ykCFm0W3UQ6jyF9tvJ2cFUmsnusv5t3vni9ayCwFxa21cXKmz3vRxuWKyVsYrYXudzdROpb3zdTJ/UI9HMZtw1fJ0gfca4UfghelXppVhl7C3aq3OcmEmp5MGcBg4m3hZ98UvhLeMMtuV5ecxznHudqds+L3qPEi1DeAv29W1NHHOqp90nTEo/aQWq3YTf//SI8BCmqgXv6LQd74Q8yzOJsNC/Bvl/QfUPxZ/fyh/nOJhwfnL1bXXq5+c/LN8rcb1Z9SfNb5Tee3na87a50/dr7t7HV6nbNO0IHOXzt/6/x97R9r/1z719q/TddPP6nO+XXH+Vn77/8AuINnbQ== Y AAAyJHiclVvLctvIFdVMXhMlk8wky2xQkV0zSckqy57KYzd6SxYlURL1ND0uELwEYeFldBOUzGJ+INvkF/I12aWyyCbfktvdaNzbIOSpqMoW+pzGBbr73L6HIDTI40jI58//88mnP/jhj378k89+uvyzn3/+i19+8eWvLkU2KQK4CLI4K64HvoA4SuFCRjKG67wAPxnEcDW421L8VQmFiLK0Jx9yeJP4YRqNosCXCJ3evP1i5fnac/3jLR6sVwcrS9VP9+2X65/3h1kwSSCVQewL8Xr9eS7fzPxCRkEM8+X+REDuB3d+CK/xMPUTEG9m+k7n3lNEht4oK/BfKj2N8jNmfiLEQzLAnokvx6LJKbCNez2Roz+9mUVpPpGQBuZCo0nsycxTw/aGUQGBjB/wwA+KCO/VC8Z+4QcSJ8e5yiBxxjCTEQ5gvrz8VP14xztX3tFGb9/b3tk9OD7oHZwcn3uaWm6711X8rUYqVlXY5afekV/ceQJvBWdfeNnIC/zcHKtJKWAERRGlobrvYVRGwnYbReGkALzTFKZBliR+Opz1EYxhJOezWR8S7+sOHv9uPl/oE+BSQWF7belWW78iCsd1sDPVaOsls9z26WV5W49BJmWW2E6burXQrxq3b7v5j/UY2B6Dx3oEtkfwWI+h7TFUPXAZ9nF0sRqh53vYX+kCRphCQw/nJnFj4LEC56/X32CUwchbWVdBMMquXhSzaqg6WPXibArFswATcm25jyH1tMJoZX1mFvAvfWzNdIC20/F2I+nHa94uikFIzCm19kKtGPIm4q6NuNuMqGk5zew1V15UVxWe7eThiKrGC3vG+4k/pFNWXq58s3Daan2OPXrJQ32jh3NuVP3R6UDlm5uvUsCZj5YAdkLM2ef27POWs8/sWTrnp1mdZWv1xJirCz0zdQ4+MjXNgOMCoBmSxVt5uRiRZo3FfrkY2089wEVQJ7dMGbw3Y7ZdHh+0E2eS51B4Ko4Js1OF2WkLs+EV/pTmvRHs2bNnfplFQ28i1NYUjbw8EyLCEmNC57GPqVPFf/zu1IabYya1jFEx5vSqz/89yCrQVh1o63sD4ZjTEPQebPoKE0PD9R2hVCxtQz179qhM8O78OMywwIyTlnEiZ+6u7vTRgbJQCyPdsKE2WkJZwdvr4SDqWB/fDHrOSRvfe9LCpOa4aVUjZ+pTqLlddfSxRTHnN9Xbrc/vuufbkdYXwLtWx4/ecCU4iGIl1lgd4IaOHdRRFW8UZ1mhaX1keH1YdUBqkMzWm9VGFpgI81lfVf7Aj2fbzQ6lH0dD3uGtOS6SmaHmCyFByPYTNDOvRwS5UDUuF1GcpVV9OsMQWeKVfhH5mK1W3yD9mYp8L9OsSDDqkz5CT+Z2OosG7RMzcJkBMYHLBMQMXWZIDLgMEDNymRExocuExIxdZkxM5DIRMe9c5h0xdy5zR0zsMvFcy7hIvEhgxqL5Hj6ozc6s4Kr3biKkN8zSr6SnvDDK8UHtPM7CeEkVO3Vjp3TVzGUyYnKXyYl57zLviSlcpiBGuIwgRrqMJGbiMhNiSpcpiZm6zJSYe5e5J+bBZR6I+eAyH+bG5tkEwMqc1dt7WSXJzKTSYMTSpr5vOTZZYnvoNuMZx+EBwSw3yoBglhjlkGCWFSUQzFKiHBHM8qEMCWbJUI4JZplQTghmaVC+I5jlQHlHMEuAMiY4ZnBCcMJgNtF8hjOCmZjLnGCm5PI9wUzGZUEw03ApCBZ8UQmW7XPCpVsSzHRbTglmoi3vCWaKLR8IZnItPxBstboTg/pMrT/tFS26BSO61n0ZjPJad2Yw8mvdm8FosHV3BiPE1v0ZjBpbd2gwkmzdo8HosnWXRu7RfRqMQlt3ajAybd2rwWi1uVtbLnG5hHOP7sRgpNu6F4PRb+tuDEbErfsxGCW37shg5Ny6J4PRdOuuDEbYrfsyGHW37sxgJN66N4PReevuDEbsrfszGMU/vkNjLhRRUDuUZIPyY4PSJtkkeJPBWwRvMXib4G0G7xC8w+BdgncZvEfwHoP3Cd5n8AHBBwx+RfArBh8SfMjgDsEdBh8RfMTgY4KPGXxC8AmDuwR3GXxK8CmDzwg+Y/A5wecM7hHcY/AFwRcMviT4ksFXBF8x+JrgawbfEHzD4FuCbx/fXl3RgVEd0+gG06+WHuM2Obflcluc23a5bc7tuNwO53Zdbpdzey63x7l9l9vn3IHLHXDulcu94tyhyx1yruNyHc4dudwR545d7phzJy53wrmuy3U5d+pyp5w7c7kzzp273Dnnei7X49yFy11w7tLlLjl35XJXnLt2uWvO3bjcDeduXc7K/pJbiPID6M8R+Nn1eX1umaUws59nLZZMDNRPqGiUIgoTv8L1MVHWLivKtcplBTNkYBCyKNqgIELGRNsSRMiOlNVNkgnRFgQRsh7aeCBChkPbDUTIZmiTgQiZC20tECFLoQ0FImQktI1AJGZTZBAyDdoyIJKyqTUIGQRtDxAhW6BNASJkBrQVQKRgM28QwSbcIFTuy2rF2HqVBqHSrgs7IlTQdTlHhMq4LuKIUPHWpRuRNqPqOtTSj/OxWm/9uxZnOajEoXVhQfoURg8tKir2k8FQnWEOiMgSCBWufxOs1aqUagEMiAj+T5AVbyVcC1vhVqKtBzKb8fufKbHaFoo1oBYKdcgGNVMCtS0U6IhaKM6QWijMMbXwdtm9oiDfUQvFeMfmZqZEWI98pgRoWziZbBZRfBmbkpkSnW2h6N5TCwVXsJmaKaHVEzRTIrMtnGg2zSiwkloorim1UFj31EJRPVALBfVhXn0dhiX43uC6/KLOqOzqoosIFVtdahGhEqsLLCJUWHVZRYTKqS6miFAR1SUUESqdunAiQgVTl0tEqEzqIokIFUddGhGhkqgLIiJUCHUZRITKny5+iFDR0yUPESp1utAhQgVOlzdEqKzpooYIFTNdyhChEqYLGCJUuHTZQoTKlS5WiFCR0iUKESpNujAhQgVJlyNEqAzpIoTILVtBqgsDXhaS7rjaiPt4xGbPpr5iOlX614NjBejcFiBUUQ9Sob5H3oYg9gtAUY031A6EVzQ+UIwi9RQV0iAbRmmIwfxJrBAxqo+T+UyoB8DnIB8LMMji4feFGdzPMQmbD3FTob8+NCW1iqcfYFdDk8Z6poKpX25ajPQvtyxGGSC3LUY5IHcsRlkgdy1GeSD3LEaZIPctRrkgDyxG2SBfWYzyQR5ajDJCdixGOSGPLEZZIY8tRnkhTyxGmSG7FqPckKcWo+yQZxaj/JDnFqMMkT2LUY7IC4tRlshLi1GeyCuLUabIa4tRrsgbi1G2yFuLGbOGQt4r/Hxs2NB+BA6cTyLhJoNJF+EWg0ka4TaDSR3hDoNJIOEug0kj4R6DSSbhPoNJKeEBg0ks4SsGk17CQwaTZMIOg0k14RGDSTjhMYNJO+EJg0k+YZfBpKDwlMEkovCMwaSj8JzBJKWwx2BSU3jBYBJUeMlg0lR4xWCSVXjNYFJWeMNgEld4y2D7YQC3tsqqifoBy4CJS2wSStoSW4SStMQ2oVpZT71t/SXHRIDnewKkh5eOYejtrHoDCHyFy3EkvGk2iYcIYQs8ob8SQS85KTz14k8WYyD1Kgzc5+gt9fe89tv2XboiqVPsEUriFPuEkjbFAaEkTfGKUFKmOCSUhCk6hJIuxRGhJEtxTCipUpwQSqIUXUJJk+KUUJKkOCOUFCnOCSVBih6hpEdxQSjJUVwSSmoUV4SSGMU1oaRFcUMoSVHcElo/jUnR94H+COGb5zCVCQRyAB3X/Ct7uEEtlOomtVCiW9RCaW5TCze7HWqhiHapheLZoxaKZp9aKJYDaqFIXlELxXFILRRFh1oohiNqoQiOqYWLf0ItXPQutXCxT6mFi3xGLVzcc2rhovaohYt5QS1cxEtq4eJdUQsX7ZpauFg31MJFumXXq5xW5bLUkgFfMmkcF24pKn/1u3yYxAZd9aaRHGcT6aHd8aZY0nIoXEME5IgcN1RdXtYa0B0XjCBouwQNvwTaMEHDMYG2TNDwTKBNEzRcE2jbBA3fBNo4QcM5gbZO0PBOoM0TNNwTaPsEDf8E2kBBw0GBtlDQ8FCgTRQ0XBRoGwUNHwXaSEHDSYG2UtDwUqDNFDTcFGg7BQ0/BdpQQcNRgbZU0PBUoE0VNFwVaFsFDV8F2lhBw1mBtlbQ8FagzRU03BVoewUNfwXaYAFzWPhJAUuOLCbgTdIhFPGDep9p6EvfCyGFAquNakcClT6YqNLjyjZXXeez/O2sXyQz3dCFT0WFJI+KCEuec379WuHgQZc7/YaIugjWx0Zs+/LI2Jf4Sd29hNOzy3t25203k2RDiD82EN2hHolpLVyn6tT9WKdcRvEQqp593ajvvj4DtwmZBWNfqNdu/YnM9CcoKJw7bLzbmps+9T1WpyzewBCcfqbZ0q9AAjcd2880UQuBfobmdo79PPYDmNcv23QqYO499apjd3rd83fmdcXbad5IR7D3eTpN9mzOa3tj10xyNscNMi7m9rmbSxQQzusnaU0qkDRG1YpGERTN0CIbycS/p54WaPbDYpHp95vMQ7bFKHk8UaP/oJ4EuOxhZ85fbjrsLCzgpV/QHahGM77EX36Ba19krOf5wgJsZSXRqqEEepXFo8JP1AOp8TQr0KAK/0F4TzrfvXiiXuzRr6xPUvOCqshx/YV+sexJH+KY9bEPRJ96m1gAMeVT9d8D5jsk6gU35YJNUNZbvV2aTUJdM7UpjiSs6vAi84YZqHDT6C7KYRj5a423k7MiidVz/fms893zeQuZpaC49TZOTvV5L9q4XDF5C6O10PmuH6Uj+dBMndwv1MNh3DZ8lSzngHut8EPwotRLs8rQS7hf87bGmVDTkykDGIy9bfzsm8JXwhtk2d3asvM45yRXu3NW/B41XoT6BvB3f1Udfayj2idNRzxqD6nVit30/4/06KGgeurlvxhk3x9gnsXZdFCAf7es/4Diz+rnD/WfSyweXL5YW3+59s3pNyvfblZ/SvHZ0m+Wfrv09dL60h+Xvl3aX+ouXSwFS7D016W/Lf19/R/r/1z/1/q/TddPP6nO+fWS87P+3/8BsVJncg== d caps AAAyNHiclVvbctzGEaWdm8PEsZ085gUVSmUnRbFISWUrb+b9trzfqZVVWGwvFiJuwsyCpFCbH8lr8gv5l1TlLZXXfEN6ZjDoHhCUK6ySiDln0MDMnJ4+iwUHeRwJubj4z08+/clPf/bzX3z2y9lf/frz33zx5Ve/PRfZpAjgLMjirLgc+ALiKIUzGckYLvMC/GQQw8XgZlXxFyUUIsrSU3mfw5vED9NoFAW+ROjtl18M31Z9CXeyCvxcTKdvv5xbXFjUP97iwrevFl88f4EHr169+u7VK2+ppuZm6p/Dt18tfd4fZsEkgVQGsS/E66XFXL6p/EJGQQzT2f5EQO4HN34Ir/Ew9RMQbyp951PvKSJDb5QV+C+Vnkb5GZWfCHGfDLBn4suxaHMK7OJeT+To1ZsqSvOJhDQwFxpNYk9mnpoGbxgVEMj4Hg/8oIjwXr1g7Bd+IHGynKsMEmcMlYxwANPZ2afqx9tfv/D2lk+3vLX1je397dPtg/0TT1OzXfc6j7/VSMW8Cjv71NvzixtP4K3gaggvG3m4DOZYTUoBIyiKKA3VfQ+jMhK22ygKJwXgnaZwG2RJ4qfDqo9gDCM5rao+JN43PTz+43T6oE+ASwWF7bWqW139iigcN8GOVaOrl8xy2+c0y7t6DDIps8R2WtGtB/3qcfu2m/9Yj4HtMXisR2B7BI/1GNoeQ9UDl2ELRxerEXq+h/2VLmCEKTX0cG4SNwYeK3D6eukNRhmMvLklFQSjbOhFMauGqoN5L85uoXgWYIIuzPYxpJ5WGM0tVWYB/9LHVqUDdJ2OtxtJP17wNlAMQmJOqbUXasWQNxE3bMSNdkRNy9vMXnPueX1V4dlOHo6objy3Z7yf+EM6Ze7F3MsHp80359ijFzzUSz2cE6Pqj04HKt/cfJ0Cznx0BLATYs4+sWefdJx9bM/SOX+bNVm20EyMubrQM9Pk4CNT0w44LgDaIVm8uRcPI9KssdgvHsb2Uw9wEdTJHVMG782YbZfHB+3EmeQ5FJ6KY8Ks12HWu8Ise4V/S/PeCvbs2TO/zKKhNxFqa4pGXp4JEWHJMaHz2MfUqeM/fndqw80xkzrGqBhzet3n/x5kHWi1CbT6o4FwzGkIeg82fYWJoeHmjlAqlrahnj17VCZ4d34cZlhgxknHOJEzd9d0+uhAWagHI122oZY7QlnB2+vhIJpYH98MTp2Tln/0pAeTmuOmVY+cqU+h5nbV0ccWxZzfVu9hc/6he74daXMBvGt1/OgN14KDKFZijdUBbujYQR3V8UZxlhWa1keG14d1B6QGSbXUrjaywESYVn1V+QM/rtbaHUo/joa8w1tzXCSVoaYPQoKQ3SdoZtqMCHKhalwuojhL6/p0jCGyxCv9IvIxW62+QfqVMYFpViQY9UkfoSdTO51Fi/aJGbjMgJjAZQJihi4zJAZcBogZucyImNBlQmLGLjMmJnKZiJh3LvOOmBuXuSEmdpl4qmVcJF4kMGPRjA/v1WZnVnDeezcR0htm6dfSU14Y5Xivdh5nYbykjp26sVO6auYyGTG5y+TEvHeZ98QULlMQI1xGECNdRhIzcZkJMaXLlMTcuswtMXcuc0fMvcvcE/PBZT5Mjc2zCYCVOWu297JOksqk0mDE0qa5bzk2WWJ76DbjGcfhAcEsN8qAYJYY5ZBglhUlEMxSohwRzPKhDAlmyVCOCWaZUE4IZmlQviOY5UB5QzBLgDImOGZwQnDCYDbRfIYzgpmYy5xgpuTyPcFMxmVBMNNwKQgWfFEJlt1zwqVbEsx0W94SzERb3hHMFFveE8zkWn4g2Gp1PQb1mVp/2is6dAtGdJ37Mhjlde7MYOTXuTeD0WDn7gxGiJ37Mxg1du7QYCTZuUeD0WXnLo3co/s0GIV27tRgZNq5V4PRanu3tlzicgnnHt2JwUi3cy8Go9/O3RiMiDv3YzBK7tyRwci5c08Go+nOXRmMsDv3ZTDq7tyZwUi8c28Go/PO3RmM2Dv3ZzCKf3yHxlwooqBxKMky5ccypU2yQvAKg1cJXmXwGsFrDF4neJ3BGwRvMHiT4E0GbxG8xeBtgrcZvEPwDoN3Cd5lcI/gHoP3CN5j8D7B+ww+IPiAwYcEHzL4iOAjBh8TfMzgE4JPGHxK8CmDzwg+Y/A5wecMviD4gsGXBF8y+IrgKwZfE3z9+Pbqig6M6phGl5l+tfQYt8K5VZdb5dyay61xbt3l1jm34XIbnNt0uU3ObbncFue2XW6bczsut8O5XZfb5VzP5Xqc23O5Pc7tu9w+5w5c7oBzhy53yLkjlzvi3LHLHXPuxOVOOHfqcqecO3O5M86du9w55y5c7oJzly53ybkrl7vi3LXLWdmfcwtRfgD9OQI/uy4255ZZCpX9PGuxZGKgfkJFoxRRmPg1ro+JsnZZUa5VLmuYIQODkEXRBgURMibaliBCdqSsb5JMiLYgiJD10MYDETIc2m4gQjZDmwxEyFxoa4EIWQptKBAhI6FtBCIxmyKDkGnQlgGRlE2tQcggaHuACNkCbQoQITOgrQAiBZt5gwg24Qahcl/WK8bWqzQIlXZd2BGhgq7LOSJUxnURR4SKty7diHQZVdehln6cj9V669+NOMtBLQ6tCwvSpzB6aFFTsZ8MhuoMc0BElkCocP2bYK1WpVQLYEBE8H+CrHhr4VrYCrcWbTOQquL3Xymx2haKNaAWCnXIBlUpgdoWCnRELRRnSC0U5phaeLvsXlGQ76iFYrxhc1MpETYjr5QAbQsnk80iii9jU1Ip0dkWiu49tVBwBZupSgmtmaBKicy2cKLZNKPASmqhuG6phcK6oxaK6p5aKKgP0/rrMCzBdwbX5Rd1RmVXF11EqNjqUosIlVhdYBGhwqrLKiJUTnUxRYSKqC6hiFDp1IUTESqYulwiQmVSF0lEqDjq0ogIlURdEBGhQqjLICJU/nTxQ4SKni55iFCp04UOESpwurwhQmVNFzVEqJjpUoYIlTBdwBChwqXLFiJUrnSxQoSKlC5RiFBp0oUJESpIuhwhQmVIFyFErtkKUl0Y8LKQHI7rjbiPR2z2bOorplenfzM4VoBObAFCFZ1CKtT3yGsQxH4BKKrxstqB8IrGB4pRpJ6iQhpkwygNMZg/iRUiRs1xMq2EegB8AvKxAIMsHv5YmMHdFJOw/RA3FfrrQ1NS63j6AXY9NGmsZyqY+uWKxUj/ctVilAFyzWKUA3LdYpQFcsNilAdy02KUCXLLYpQLcttilA1yx2KUD3LXYpQRsmcxygm5ZzHKCrlvMcoLeWAxygx5aDHKDXlkMcoOeWwxyg95YjHKEHlqMcoReWYxyhJ5bjHKE3lhMcoUeWkxyhV5ZTHKFnltMWPWUMibhZ+PDRvaj8CB80kkXGEw6SJcZTBJI1xjMKkjXGcwCSTcYDBpJNxkMMkk3GIwKSXcZjCJJdxhMOkl3GUwSSbsMZhUE+4xmIQT7jOYtBMeMJjkEx4ymBQUHjGYRBQeM5h0FJ4wmKQUnjKY1BSeMZgEFZ4zmDQVXjCYZBVeMpiUFV4xmMQVXjPYfhjAra22aqJ5wDJg4hIrhJK2xCqhJC2xRqhW1lNvTX/JMRHg+Z4A6eGlYxh66/PeAAJf4XIcCe82m8RDhLAFntBfiaCXnBSeevEnizGQehUG7nL0lvp7Xvtt+wZdkdQpNgklcYotQkmbYptQkqbYIZSUKXYJJWGKHqGkS7FHKMlS7BNKqhQHhJIoxSGhpElxRChJUhwTSooUJ4SSIMUpoaRHcUYoyVGcE0pqFBeEkhjFJaGkRXFFKElRXBPaPI1J0feB/gjhm+cwtQkEcgA91/wre7hMLZTqCrVQoqvUQmmuUQs3u3VqoYg2qIXi2aQWimaLWiiWbWqhSHaoheLYpRaKokctFMMetVAE+9TCxT+gFi76IbVwsY+ohYt8TC1c3BNq4aKeUgsX84xauIjn1MLFu6AWLtoltXCxrqiFi3TNrlc7rdplqSUDvmTSOC7cUlT+6nf5MIkNOu/dRnKcTaSHdse7xZKWQ+EaIiBH5Lih+vKy0YDu+MAIgrZL0PJLoA0TtBwTaMsELc8E2jRByzWBtk3Q8k2gjRO0nBNo6wQt7wTaPEHLPYG2T9DyT6ANFLQcFGgLBS0PBdpEQctFgbZR0PJRoI0UtJwUaCsFLS8F2kxBy02BtlPQ8lOgDRW0HBVoSwUtTwXaVEHLVYG2VdDyVaCNFbScFWhrBS1vBdpcQctdgbZX0PJXoA0WMIeFnxSw5MhiAt4kHUIR36v3mYa+9L0QUiiw2qh2JFDpg4kqPa5sc9V1WuVvq36RVLqhC5+KCkkeFRGWPOf85rXCwb0ud/oNEXURrI+t2PblkbEv8ZO6ewmn5yHveTjtupkkG0L8sYHoDs1ITOvBdepOhx/rlMsoHkLds68bzd03Z+A2IbNg7Av12q0/kZn+BAWFc4etd1tz06e5x/qUhzcwBKefaXb0K5DATcf2M03UQqCfobmdYz+P/QCmzcs2vRqYek+9+tidXvf89WlT8dbbN9IT7H2eXps9nvLa3to1k5zNcYuMi6l97uYSBYTT5klamwokjVG1olEERTu0yEYy8e+opwXa/bBYZPr9JvOQ7WGUPJ6o0X9QTwJcdrc35S837fYeLOC5X9AdqEY7vsRffoFrX2Ss58mDBVjNSqJVQwn0IotHhZ+oB1Lj26xAgyr8e+E96f3w/Il6sUe/sj5JzQuqIsf1F/rFsid9iGPWxz4QfeqtYAHElE/Vf/eY75CoF9yUCzZBWW/1dmk2CXXN1KY4kjCvw4vMG2agwt1GN1EOw8hfaL2dnBVJrJ7rT6veD4vTDjJLQXFLXZy81ec97+JyxeQdjNZC74d+lI7kfTt1cr9QD4dx2/BVspwA7rXCD8GLUi/NakMv4W7BWx1nQk1PpgxgMPbW8LNvCl8Lb5BlNwuzzuOcg1ztzlnxJ9R4EeobwN/9eXX0sY5qnzQd8ag7pFYrdtP/P9LjFAV1ql7+i0H2/QHmWZzdDgrwb2b1H1D8Wf182/y5xMOD8+cLSy8WXh69nPt+pf5Tis9mfj/zh5lvZpZmvpv5fmZr5nDmbCaYmcz8deZvM39f+sfSv5b+vfQf0/XTT+pzfjfj/Cz9939mFG6W U AAAyJHiclVvLctvIFdVMXhMlk8wky2xQkV0zSckqy57KYzd6SxYlURL1ND0uELwEYeFldBOUzGJ+INvkF/I12aWyyCbfktvdaNzbIOSpqMoW+pzGBbr73L6HIDTI40jI58//88mnP/jhj378k89+uvyzn3/+i19+8eWvLkU2KQK4CLI4K64HvoA4SuFCRjKG67wAPxnEcDW421L8VQmFiLK0Jx9yeJP4YRqNosCXCJ1evP1i5fnac/3jLR6sVwcrS9VP9+2X65/3h1kwSSCVQewL8Xr9eS7fzPxCRkEM8+X+REDuB3d+CK/xMPUTEG9m+k7n3lNEht4oK/BfKj2N8jNmfiLEQzLAnokvx6LJKbCNez2Roz+9mUVpPpGQBuZCo0nsycxTw/aGUQGBjB/wwA+KCO/VC8Z+4QcSJ8e5yiBxxjCTEQ5gvrz8VP14xztX3tFGb9/b3tk9OD7oHZwcn3uaWm6711X8rUYqVlXY5afekV/ceQJvBWdfeNnIC/zcHKtJKWAERRGlobrvYVRGwnYbReGkALzTFKZBliR+Opz1EYxhJOezWR8S7+sOHv9uPl/oE+BSQWF7belWW78iCsd1sDPVaOsls9z26WV5W49BJmWW2E6burXQrxq3b7v5j/UY2B6Dx3oEtkfwWI+h7TFUPXAZ9nF0sRqh53vYX+kCRphCQw/nJnFj4LEC56/X32CUwchbWVdBMMquXhSzaqg6WPXibArFswATcm25jyH1tMJoZX1mFvAvfWzNdIC20/F2I+nHa94uikFIzCm19kKtGPIm4q6NuNuMqGk5zew1V15UVxWe7eThiKrGC3vG+4k/pFNWXq58s3Daan2OPXrJQ32jh3NuVP3R6UDlm5uvUsCZj5YAdkLM2ef27POWs8/sWTrnp1mdZWv1xJirCz0zdQ4+MjXNgOMCoBmSxVt5uRiRZo3FfrkY2089wEVQJ7dMGbw3Y7ZdHh+0E2eS51B4Ko4Js1OF2WkLs+EV/pTmvRHs2bNnfplFQ28i1NYUjbw8EyLCEmNC57GPqVPFf/zu1IabYya1jFEx5vSqz/89yCrQVh1o63sD4ZjTEPQebPoKE0PD9R2hVCxtQz179qhM8O78OMywwIyTlnEiZ+6u7vTRgbJQCyPdsKE2WkJZwdvr4SDqWB/fDHrOSRvfe9LCpOa4aVUjZ+pTqLlddfSxRTHnN9Xbrc/vuufbkdYXwLtWx4/ecCU4iGIl1lgd4IaOHdRRFW8UZ1mhaX1keH1YdUBqkMzWm9VGFpgI81lfVf7Aj2fbzQ6lH0dD3uGtOS6SmaHmCyFByPYTNDOvRwS5UDUuF1GcpVV9OsMQWeKVfhH5mK1W3yD9mYp8L9OsSDDqkz5CT+Z2OosG7RMzcJkBMYHLBMQMXWZIDLgMEDNymRExocuExIxdZkxM5DIRMe9c5h0xdy5zR0zsMvFcy7hIvEhgxqL5Hj6ozc6s4Kr3biKkN8zSr6SnvDDK8UHtPM7CeEkVO3Vjp3TVzGUyYnKXyYl57zLviSlcpiBGuIwgRrqMJGbiMhNiSpcpiZm6zJSYe5e5J+bBZR6I+eAyH+bG5tkEwMqc1dt7WSXJzKTSYMTSpr5vOTZZYnvoNuMZx+EBwSw3yoBglhjlkGCWFSUQzFKiHBHM8qEMCWbJUI4JZplQTghmaVC+I5jlQHlHMEuAMiY4ZnBCcMJgNtF8hjOCmZjLnGCm5PI9wUzGZUEw03ApCBZ8UQmW7XPCpVsSzHRbTglmoi3vCWaKLR8IZnItPxBstboTg/pMrT/tFS26BSO61n0ZjPJad2Yw8mvdm8FosHV3BiPE1v0ZjBpbd2gwkmzdo8HosnWXRu7RfRqMQlt3ajAybd2rwWi1uVtbLnG5hHOP7sRgpNu6F4PRb+tuDEbErfsxGCW37shg5Ny6J4PRdOuuDEbYrfsyGHW37sxgJN66N4PReevuDEbsrfszGMU/vkNjLhRRUDuUZIPyY4PSJtkkeJPBWwRvMXib4G0G7xC8w+BdgncZvEfwHoP3Cd5n8AHBBwx+RfArBh8SfMjgDsEdBh8RfMTgY4KPGXxC8AmDuwR3GXxK8CmDzwg+Y/A5wecM7hHcY/AFwRcMviT4ksFXBF8x+JrgawbfEHzD4FuCbx/fXl3RgVEd0+gG06+WHuM2Obflcluc23a5bc7tuNwO53Zdbpdzey63x7l9l9vn3IHLHXDulcu94tyhyx1yruNyHc4dudwR545d7phzJy53wrmuy3U5d+pyp5w7c7kzzp273Dnnei7X49yFy11w7tLlLjl35XJXnLt2uWvO3bjcDeduXc7K/pJbiPID6M8R+Nn1eX1umaUws59nLZZMDNRPqGiUIgoTv8L1MVHWLivKtcplBTNkYBCyKNqgIELGRNsSRMiOlNVNkgnRFgQRsh7aeCBChkPbDUTIZmiTgQiZC20tECFLoQ0FImQktI1AJGZTZBAyDdoyIJKyqTUIGQRtDxAhW6BNASJkBrQVQKRgM28QwSbcIFTuy2rF2HqVBqHSrgs7IlTQdTlHhMq4LuKIUPHWpRuRNqPqOtTSj/OxWm/9uxZnOajEoXVhQfoURg8tKir2k8FQnWEOiMgSCBWufxOs1aqUagEMiAj+T5AVbyVcC1vhVqKtBzKb8fufKbHaFoo1oBYKdcgGNVMCtS0U6IhaKM6QWijMMbXwdtm9oiDfUQvFeMfmZqZEWI98pgRoWziZbBZRfBmbkpkSnW2h6N5TCwVXsJmaKaHVEzRTIrMtnGg2zSiwkloorim1UFj31EJRPVALBfVhXn0dhiX43uC6/KLOqOzqoosIFVtdahGhEqsLLCJUWHVZRYTKqS6miFAR1SUUESqdunAiQgVTl0tEqEzqIokIFUddGhGhkqgLIiJUCHUZRITKny5+iFDR0yUPESp1utAhQgVOlzdEqKzpooYIFTNdyhChEqYLGCJUuHTZQoTKlS5WiFCR0iUKESpNujAhQgVJlyNEqAzpIoTILVtBqgsDXhaS7rjaiPt4xGbPpr5iOlX614NjBejcFiBUUQ9Sob5H3oYg9gtAUY031A6EVzQ+UIwi9RQV0iAbRmmIwfxJrBAxqo+T+UyoB8DnIB8LMMji4feFGdzPMQmbD3FTob8+NCW1iqcfYFdDk8Z6poKpX25ajPQvtyxGGSC3LUY5IHcsRlkgdy1GeSD3LEaZIPctRrkgDyxG2SBfWYzyQR5ajDJCdixGOSGPLEZZIY8tRnkhTyxGmSG7FqPckKcWo+yQZxaj/JDnFqMMkT2LUY7IC4tRlshLi1GeyCuLUabIa4tRrsgbi1G2yFuLGbOGQt4r/Hxs2NB+BA6cTyLhJoNJF+EWg0ka4TaDSR3hDoNJIOEug0kj4R6DSSbhPoNJKeEBg0ks4SsGk17CQwaTZMIOg0k14RGDSTjhMYNJO+EJg0k+YZfBpKDwlMEkovCMwaSj8JzBJKWwx2BSU3jBYBJUeMlg0lR4xWCSVXjNYFJWeMNgEld4y2D7YQC3tsqqifoBy4CJS2wSStoSW4SStMQ2oVpZT71t/SXHRIDnewKkh5eOYejtrHoDCHyFy3EkvGk2iYcIYQs8ob8SQS85KTz14k8WYyD1Kgzc5+gt9fe89tv2XboiqVPsEUriFPuEkjbFAaEkTfGKUFKmOCSUhCk6hJIuxRGhJEtxTCipUpwQSqIUXUJJk+KUUJKkOCOUFCnOCSVBih6hpEdxQSjJUVwSSmoUV4SSGMU1oaRFcUMoSVHcElo/jUnR94H+COGb5zCVCQRyAB3X/Ct7uEEtlOomtVCiW9RCaW5TCze7HWqhiHapheLZoxaKZp9aKJYDaqFIXlELxXFILRRFh1oohiNqoQiOqYWLf0ItXPQutXCxT6mFi3xGLVzcc2rhovaohYt5QS1cxEtq4eJdUQsX7ZpauFg31MJFumXXq5xW5bLUkgFfMmkcF24pKn/1u3yYxAZd9aaRHGcT6aHd8aZY0nIoXEME5IgcN1RdXtYa0B0XjCBouwQNvwTaMEHDMYG2TNDwTKBNEzRcE2jbBA3fBNo4QcM5gbZO0PBOoM0TNNwTaPsEDf8E2kBBw0GBtlDQ8FCgTRQ0XBRoGwUNHwXaSEHDSYG2UtDwUqDNFDTcFGg7BQ0/BdpQQcNRgbZU0PBUoE0VNFwVaFsFDV8F2lhBw1mBtlbQ8FagzRU03BVoewUNfwXaYAFzWPhJAUuOLCbgTdIhFPGDep9p6EvfCyGFAquNakcClT6YqNLjyjZXXeez/O2sXyQz3dCFT0WFJI+KCEuec379WuHgQZc7/YaIugjWx0Zs+/LI2Jf4Sd29hNOzy3t25203k2RDiD82EN2hHolpLVyn6tT9WKdcRvEQqp593ajvvj4DtwmZBWNfqNdu/YnM9CcoKJw7bLzbmps+9T1WpyzewBCcfqbZ0q9AAjcd2880UQuBfobmdo79PPYDmNcv23QqYO499apjd3rd83fmdcXbad5IR7D3eTpN9mzOa3tj10xyNscNMi7m9rmbSxQQzusnaU0qkDRG1YpGERTN0CIbycS/p54WaPbDYpHp95vMQ7bFKHk8UaP/oJ4EuOxhZ85fbjrsLCzgpV/QHahGM77EX36Ba19krOf5wgJsZSXRqqEEepXFo8JP1AOp8TQr0KAK/0F4TzrfvXiiXuzRr6xPUvOCqshx/YV+sexJH+KY9bEPRJ96m1gAMeVT9d8D5jsk6gU35YJNUNZbvV2aTUJdM7UpjiSs6vAi84YZqHDT6C7KYRj5a423k7MiidVz/fms893zeQuZpaC49TZOTvV5L9q4XDF5C6O10PmuH6Uj+dBMndwv1MNh3DZ8lSzngHut8EPwotRLs8rQS7hf87bGmVDTkykDGIy9bfzsm8JXwhtk2d3asvM45yRXu3NW/B41XoT6BvB3f1Udfayj2idNRzxqD6nVit30/4/06KGgeurlvxhk3x9gnsXZdFCAf7es/4Diz+rnD/WfSyweXL5YW3+59s3pNyvfblZ/SvHZ0m+Wfrv09dL60h+Xvl3aX+ouXSwFS7D016W/Lf19/R/r/1z/1/q/TddPP6nO+fWS87P+3/8B6kNnbg== Figure 4: Object Capsule Autoencoder . Point Cloud X and initial part capsules V init are used to compute part capsules V using the PointsT oParts model (denoted by the red dashed box). Multi-view agreement is used to compute the object capsule h = ( h q , h f ) . h f is decoded into part capsules (in their canonical pose). These are transformed into the global frame by applying h q , to produce U . This is used to output the reconstructed point cloud Y using the decoder from the PointsT oParts model. In addition, refined part capsules T are computed using the PointsT oParts model starting with U as initial part capsules. T is used as the regression tar get for U . 3.4 PartsT oObject A utoencoder A second model is used to construct a single object-lev el capsule from part-lev el capsules. This time, Multi-V ie w Agreement acts on part capsules instead of points. The process is illustrated in Figure 4 and in Algorithm 2 . Starting from the input point cloud X and initial set of part capsules V init , an updated set of part capsules V = { ( v j q , v j f ) } J j =1 is obtained using the PointsT oParts Autoencoder (Algorithm 1 ). No w , Multi-V ie w Agreement is applied on V . h q is initialized to a random pose and z k are set by randomly perturbing it. The form of the pose voting network Q and feature voting network F are again similar to PointNet: Q ( V | z ) = Q project ( maxpool j Q embed ( v j | z )) , F ( V | z ) = F project ( maxpool j F embed ( v j | z )) . The input to the embedding networks is the concatena- tion of the relativ e pose and feature components of the part capsule v j | z = ( z − 1 ◦ v j q , v j f ) . Routing probabilities are not required when modeling a single object, since all parts would route to that object. When dealing with multiple ob- jects, routing probabilities can be incorporated similarly to Equation 1 and Equation 2 . The decoder G dif fers from the FoldingNet Decoder, where we previously capitalized on the fact that a deformed surface and a unit square share the same topology . Ho wev er , it is not ob vious ho w to define a shared geometric topology for generic objects. A sphere might be a good candidate, b ut it would not be able to model objects that ha ve holes. Therefore, we designed G to di- rectly output a predetermined number of part capsules Algorithm 2 Object Capsule Autoencoder Require: Input Point Cloud X , Initial Part Capsules V init 1: V ← PointsT oParts ( X, V init , 3) 2: h q ← random pose 3: for k ← 1 to K do 4: z k ← h q ◦ r , r ∼ random perturbation 5: ∆ z k ← Q ( V | z k ) 6: f k ← F ( V | z k ◦ ∆ z k ) 7: µ , σ ← compute mean and variance of { f k } 8: h f ← µ + σ ∗ , ∼ N (0 , 1) 9: h q ← z 1 ◦ ∆ z 1 10: u j q | h q , u j f J j =1 ← G ( h f ) 11: U ← u j q , u j f J j =1 12: T ← PointsT oParts ( X , U, 3) 13: Y ← PointsT oPartsDecoder ( U ) 14: Compute Loss L From Equation 4 u j q | h q , u j f J j =1 = G ( h f ) , (3) where u j q | h q is the part’ s pose in the object’ s canonical frame, and u j f is the part’ s feature. The part’ s pose is then composed with the object’ s pose, h q , to obtain the part’ s pose in the global frame. These poses, along with the features, u j f , define the set of reconstructed part capsules U = ( u j q , u j f ) J j =1 decoded from object capsule h . Computing a reconstruction loss between U and V is not straightforward as the decomposition of an object into parts 5 is not unique – there are infinitely many ways to divide an object into parts and assign poses – and the PointsT oParts Autoencoder may hav e come up with any one of them (depending on V init ). Howe ver , we want h f to be the same no matter ho w the part decomposition was done since h f is meant to be a pose-in v ariant representation of the object that should only depend on the object’ s identity . Therefore, we want all possible V ’ s for the same object to map to the same h f , which through Equation 3 produces a unique (canonical) part decomposition U . This makes the desired mapping from V to U many-to-one, so a straightforward regression of U to V (using some form of a Chamfer distance) does not work. Instead, regression targets T , are obtained by running a few iterations of the PointsT oParts Autoencoder , starting with U . This finds capsule states that are close to, but better than U ,according to the PointsT oParts Autoencoder . Intuitiv ely , this can be seen as the high-le vel capsule telling the lo w-le vel capsules how to view the object, and the low-le v el capsules then coming up with a local refinement of that suggestion, which provides the learning signal for the high-le v el capsules. For regression, a distance function between capsules is defined: d caps ( v , u ) = || v q [ t ] − u q [ t ] || 2 + 1 − ( h v q [ r ] , u q [ r ] i ) 2 + || v f − u f || 2 , where v q [ t ] , v q [ r ] represent the translation and rotation components of the pose. The similarity between quater - nions is computed as the squar e of their dot products.This takes care of the fact that quaternions ha ve anti-podal symmetry ( r and − r represent the same rotation). Given reconstructed part capsules U = { u j } J j =1 and target part capsules T = { t j } J j =1 , the regression loss function is then L part = J X j =1 d caps ( u j , t j ) . Another learning signal is provided through the recon- struction of the input point cloud X . T o do this, we decode U using the PointsT oPartsDecoder from Algorithm 1 to obtain reconstructed points Y and use Chamfer distance as the loss function. The overall loss function for the object autoencoder model is: L = L part + λd Chamfer ( X, Y ) , (4) where λ is a hyperparameter tuned on a v alidation set. The model is learned by first training the PointsT oParts Autoencoder , and then training the PartsT oObject Autoen- coder , while keeping the first model fix ed. 4 Experiments W e design experiments to validate two key properties that the learned object representation should hav e: (1) the pose component should be pose-equi variant, and (2) the feature component should represent object identity (i.e. be pose- in v ariant). The first is e v aluated using pose alignment from pairs of arbitrarily rotated objects, and the second, using ob- ject retriev al. W e also include an ablation study and provide a number of qualitati v e visualizations that sho w the learned representation. In all our e xperiments, we train our model on the ShapeNet Core55 dataset [ 3 ], a 55-object-category dataset with 57,448 CAD models, each uniformly sampled to 2048 3D points. For ev aluation, we used the ModelNet40 [ 19 ] dataset, which consists of CAD models from 40 object classes. In particular , we used the same subset of 2,468 test objects as [ 15 ]. See Appendix C for more details. Dur- ing training, each ShapeNet object is modeled with 16 part capsules (each having an 8-D feature), while the entire ob- ject is modeled with a single object capsule (1024-D fea- ture). The embedding, projection, and decoder networks consist of ResNet blocks (details in Appendix A and Ap- pendix B ). This unsupervised model is then used without additional fine-tuning to extract representations for Model- Net40 objects. W e operate in this transfer learning setting to simulate a situation where the model is applied on generic objects that are not known at training time. 4.1 Pose Equi variance W e analyze the equi variance of the object capsule’ s pose at two le v els: (1) by directly changing the part capsules’ pose, and (2) by changing the points’ pose. The first setting is designed to specifically test the PartsT oObject model. This setting simulates a situation where changes in the pose of the object are perfectly captured by the PointsT oParts model in terms of changes in the part capsule’ s pose only (keeping the part features in v ariant) and allows us to e valuate the sec- ond layer independent of the first. Equivariance w .r .t parts’ pose. If our model can reco ver the canonical pose of an object, it should be possible to align any two views by computing the relativ e transformation be- tween the recov ered poses. T o test if the proposed Multi- V iew Agreement method can do this, we do the following experiment. First, we encode a gi ven test object as part cap- sules V 1 . Next, we apply an arbitrary rotation r to the pose components of V 1 to generate part capsules V 2 , where the rotation axis is sampled randomly in R 3 and rotation an- gle is sampled uniformly in [ − π , π ] . W e recov er the object poses h 1 and h 2 for each set of part capsules independently . If the model is working perfectly , the relativ e transform ˆ r = h 2 ◦ h − 1 1 should be equal to r . Subsequently , we com- pute the distance between the estimated and groundtruth ro- tation quaternions d ( r , ˆ r ) = 2 cos − 1 ( |h r , ˆ r i| ) , which is the angle encoded by the quaternion r − 1 ˆ r . Rotation error is di- 6 Ap p l e C on fi d en ti a l –I n t er n a l U s e On l y Point cloud in recov ered canonical pose . . . T ransformed part capsules . . . . . . . . . Superimposed point cloud in recov ered canonical pose (a) Recovered canonical pose from parts that have been trans- formed in different ways. The superimposed point cloud visually indicates the stability of the recov ered canonical pose. Ap p l e C on fi d en ti a l –I n t er n a l U s e On l y Setting E Setting C Object class Refer ence object instance Chair Bed Sofa T oilet Superimposed point cloud in recov ered canonical pose Setting A Monitor (b) Examples of superimposed point clouds in recovered canonical poses across three different experimental settings (see T able 1 ). Setting F consistently produces the most visually stable recov ered canonical poses across the set of 50 transformations. Figure 5: V isualization of pose equiv ariance results. Each object is encoded into part capsules. The part capsules are then trans- formed by rotating about a random axis. A canonical pose is in- ferred from the rotated capsules, and the object is visualized in this canonical pose. If the visualization is stable across dif ferent rotations, then the object representation is pose equiv ariant. vided by π to bound it in [0 , 1] . Finally , we ev aluate the av erage rotation error on likely-asymmetric object classes (chair , bed, sofa, toilet, monitor), following [ 1 ], from the ModelNet10 dataset (a subset of the ModelNet40). W e do an ablativ e study to quantify the impact of the design choices made in our model. T able 1 shows the re- sults of our e xperiments, where we vary dif ferent aspects of our model, such as the number of viewpoints and amount of perturbation added only during training . At test time, only one viewpoint is used and no perturbation is added, to en- sure a fair comparison. Our first model (Setting A) has only one view that is allowed to vote to transform itself, record a percept and reconstruct from that. V iewpoint perturba- tion is irrele v ant here, since there is only a single randomly- initialized viewpoint. This model has a high pose error rate of 0.259, even though the autoencoder’ s reconstruction er- ror was similar to the other models. This shows that a model that can reconstruct well might not have necessarily learned a canonical pose. Ha ving two vie ws (Setting B) that hav e to agree with each other during training, drops the error rate to 0.135. V iewpoint perturbation of [-45 ◦ , 45 ◦ ] about a ran- dom axis was used. Increasing the number of views to 4 (Setting C) yielded a similar result. If we gradually ramp up the noise injected in the view perturbations from 45 ◦ to 180 ◦ as training progressed, the error reduces further (Set- ting D). Finally , if instead of doing just one step of pose voting, we perform 3 steps (each time starting from the pre- vious viewpoint), we see a significant improv ement to 0.023 (Setting E). This sho ws that the pose voting network can mov e random viewpoints to canonical ones and is able to do so with increasing accuracy when applied repeatedly . For each object, we pick a random axis and rotate the object about it by an angle going from -180 ◦ to 180 ◦ in 50 steps. The point cloud vie wed in the canonical pose disco v- ered by model is superimposed and visualized (Figure 5 ). W e observe that the model trained with multiple views and multiple pose voting steps recovers the most stable canon- ical pose, sho wing that the PartsT oObject layer works well due to the components proposed in our model. It should be noted that this performance is under the assumption that the PointsT oParts layer was w orking ideally . Equivariance w .r .t points’ pose. T o jointly e v aluate pose equiv ariance of the two model layers, we use the very hard task of aligning two randomly-rotated point clouds of an object without processing both together (i.e. rotating each one to its canonical pose independently). W e compare with two recently proposed deep netw orks that to do point cloud alignment. PointNetLK [ 2 ] uses a PointNet as an imaging function and applies the Lucas-Kanade approach to align two vie ws, while QE-Net [ 1 ] learns quaternion-v alued pose representations by aggregating pose-votes from local re- gions. In the e xperimental setting of [ 1 ], which we also follow , aligning using PCA gets a rotation error of 0.42, PointNetLK get 0.38 and QE-Net gets 0.17. In the same setting, our model gets 0.16, if we allo w 10 trials and pick the transformation that leads to the least Chamfer distance after alignment. W ith one trial, performance is similar to PCA (0.42). W e found that multiple trials were necessary 7 T able 1: Results on equivariance and in variance w .r .t parts’ pose. Setting A verage Instance Retrieval 1-NN Rotation Error T op-1 T op-10 Classification A. views=1 0.259 0.286 0.386 0.485 B. views=2, noise=45 0.135 0.598 0.765 0.743 C. views=4, noise=45 0.134 0.620 0.787 0.754 D. views=4, noise=[45:180] 0.106 0.701 0.857 0.803 E. views=4, noise=[45:180], 3 v oting steps 0.023 0.943 0.959 0.960 since the model suf fers from a local-minima problem. In- stead of finding a single unique canonical pose, the model learns a number of attractor regions. Depending on the ini- tialization of the object pose, it finds one of these canonical poses. These poses often correspond to principle axes of the input point cloud. Since the pose-voting and percept-v oting networks are jointly learned, it is likely that the pose-voting network commits to certain canonical poses based on an imperfect (partially trained) percept function, which only captures the principle axes to begin with. Even though the percept function becomes more discerning later in training, the pose votes are not likely to change drastically , which is often required to go from one direction of the principle ax es to another . Inv estigating better training strategies for this model is an important direction for future work. 4.2 Pose In variance Analysis The latent variable h f represents the identity of the input object and should be in v ariant to its pose. W e ev aluate whether h f extracted from an object can be used as a re- triev al query to find it within a database (test set of Mod- elNet40) of randomly rotated objects. Query matching is done using the L2 distance between the features. Similar to the pose equi variance experiments, e valuation is done sepa- rately for the second layer and the combined model. In variance w .r .t parts’ pose. W e use the model’ s variants (Settings A-E) to extract 1024-D object features from ran- domly rotated objects in the database. The part capsules extracted in this process are randomly rotated to generate the queries to be testing against. Retrie val accuracies are computed by checking if the correct object instance is the best match or within the top 10 matches. W e also check if the best matching object belongs to the same class as the query (Nearest Neighbor Classification). From T able 1 , we see that retriev al performance has a similar trend as rotation error . Models trained with multiple views and more voting steps perform better . The best model has a top-1 accuracy of 94.3%, top-10 accuracy of 95.9%, and 1-NN classification accuracy of 96.0%, indicating that the model almost always finds the exact instance e ven among rotated objects. In variance w .r .t points’ pose. In this setting, we rotate the points, re-encode the points using the part capsule model, and extract an object feature from the new part cap- sules. Here, performance is significantly worse, with the best model getting top-1 and top-10 accuracies of 7.8% and 17.9% respecti vely . The model is generally unable to find a canonical vie w and ends up representing different views of an object with different feature vectors. Ho we ver , the 1-NN classification accuracy is 44%, which means that al- though the model rarely gets the exact instance matched, it frequently matches with other instances in the same class. 4.3 V isualizing P art F eatures Our model learns to represent a point cloud as a collection of surfaces (Figure 6 ). This visualization shows part cap- sules obtained by the PointsT oParts model. W e observe that the parts capture different types of surfaces including sharply curved ones. Each part typically latches onto a smooth local region. The parts discov ered in our model are more local, compared to parts learned by the 3D Point Cap- sule Network (3DCapsNet) [ 22 ]. This is a direct result of representing the pose separately from the feature that de- fines the shape of the part. In the absence of this, the Fold- ingNet in 3DCapsNet needs to model both the shape and location of the part, leading to parts that are not effecti vely constrained to be local. More part visualizations, includ- ing those obtained from the object capsule autoencoder , are shown in Appendix E . 4.4 Discussion Our experiments demonstrate some key strengths and weak- nesses of our approach. Based on experiments with just the PartsT oObject layer , we showed that the Multi-V ie w Agreement algorithm discovers canonical poses and pose- in v ariant representations, and effecti vely solve alignment and retrie val tasks. The visualized part features suggests 8 Figure 6: V isualization of part decompositions obtained by the PointsT oParts model. that the same algorithm when applied to points, can simul- taneously do routing and learn plausible parts. Our work also highlights a key issue with learning interpretable ob- ject representations, which is how to handle multiple valid explanations of an object. In our case, many instantiations of part capsules explain the points equally well. The second layer must reconcile these to learn a unique object-level fea- ture and pose. Having multiple ways to interpret an object is a fundamental property of the visual world and models that aim to learn object representations must solve it in some way . In our capsule network design, we solv e this by using top-down information, i.e. the object-lev el capsule tells the lower -le vel capsules in the decoder how to view the points. This decouples the input part decomposition from the out- put one. Having this nov el decoder design made it possi- ble to train our networks. The canonical poses discovered by the o verall model are still not entirely unique. How- ev er , this work provides some e vidence that it is possible to learn interpretable geometric representations and Multi- V iew Agreement can be a useful tool to wards that goal. 5 Conclusion W e proposed a model that represents parts and objects as discrete computational entities, called geometric capsules. W e developed a nov el Multi-V iew Agreement algorithm that infers parent capsule poses. W e quantified the degree to which the in v ariance and equiv ariance properties of our learned representation hold in the PartsT oObject layer and in the model as a whole. Our analyses sho w the bene- fits of having multiple votes agree. In future work, we would like to further improv e the stability of the model and apply it to tasks that benefit from using the persis- tence of part-whole geometric relationships o ver time, such as object tracking under heavy occlusion in point cloud se- quences. Refer ences [1] Anonymous. Quaternion equiv ariant capsule networks for 3D point clouds. Submitted to International Confer ence on Learning Representations (ICLR) , 2020. under revie w . 2 , 7 , 12 [2] Y asuhiro Aoki, Hunter Goforth, Rangaprasad Arun Sriv at- san, and Simon Luce y . PointNetLK: Rob ust & ef ficient point cloud registration using pointnet. In Computer V ision and P attern Recognition (CVPR) , 2019. 7 [3] Angel X. Chang, Thomas A. Funkhouser , Leonidas J. Guibas, Pat Hanrahan, Qi-Xing Huang, Zimo Li, Silvio Sav arese, Manolis Savv a, Shuran Song, Hao Su, Jianxiong Xiao, Li Y i, and Fisher Y u. ShapeNet: An information-rich 3D model repository . CoRR , abs/1512.03012, 2015. 6 , 12 [4] Ravi Garg, BG V ijay Kumar , Gustavo Carneiro, and Ian Reid. Unsupervised cnn for single view depth estimation: Geometry to the rescue. In Eur opean Confer ence on Com- puter V ision , pages 740–756. Springer, 2016. 2 [5] Cl ´ ement Godard, Oisin Mac Aodha, and Gabriel J. Bros- tow . Unsupervised monocular depth estimation with left- right consistency . In CVPR , 2017. 2 [6] JunY oung Gwak, Christopher B Choy , Manmohan Chan- draker , Animesh Garg, and Silvio Savarese. W eakly super- vised 3d reconstruction with adversarial constraint. In 3D V ision (3D V), 2017 F ifth International Confer ence on 3D V i- sion , 2017. 2 [7] Geoffre y E. Hinton, Alex Krizhevsky , and Sida D. W ang. T ransforming auto-encoders. In International Conference on Artificial Neural Networks (ICANN) , 2011. 1 , 2 [8] Geoffre y E. Hinton, Sara Sabour, and Nicholas Frosst. Ma- trix capsules with EM routing. In International Confer ence on Learning Repr esentations (ICLR) , 2018. 1 , 2 , 3 [9] Danilo Jimenez Rezende, S. M. Ali Eslami, Shakir Mo- hamed, Peter Battaglia, Max Jaderberg, and Nicolas Heess. Unsupervised learning of 3d structure from images. In Ad- vances in Neural Information Pr ocessing Systems 29 , pages 4996–5004. 2016. 2 [10] Diederik Kingma and Jimmy Ba. Adam: A method for stochastic optimization. International Confer ence on Learn- ing Repr esentations (ICLR) , 2014. 4 [11] Adam R. K osiorek, Sara Sabour , Y ee Whye T eh, and Geof- frey E. Hinton. Stacked capsule autoencoders. In Neural Information Pr ocessing Systems (NeurIPS) , 2019. 2 [12] Juho Lee, Y oonho Lee, Jungtaek Kim, Adam Kosiorek, Se- ungjin Choi, and Y ee Whye T eh. Set transformer: A frame- work for attention-based permutation-in v ariant neural net- works. In International Conference on Machine Learning (ICML) , 2019. 2 9 [13] Chen-Hsuan Lin, Chen Kong, and Simon Lucey . Learn- ing efficient point cloud generation for dense 3d object re- construction. In AAAI Conference on Artificial Intelligence (AAAI) , 2018. 2 [14] Adam Paszke, Sam Gross, Soumith Chintala, Gregory Chanan, Edward Y ang, Zachary DeV ito, Zeming Lin, Alban Desmaison, Luca Antiga, and Adam Lerer . Automatic dif- ferentiation in PyT orch. In NIPS Autodif f W orkshop , 2017. 12 [15] Charles R. Qi, Hao Su, Kaichun Mo, and Leonidas J Guibas. PointNet: Deep learning on point sets for 3D classification and segmentation. Computer V ision and P attern Recognition (CVPR) , 2017. 3 , 6 [16] Sara Sabour, Nicholas Frosst, and Geof frey E. Hinton. Dy- namic routing between capsules. In Neur al Information Pr o- cessing Systems (NIPS) , 2017. 1 , 2 [17] Shubham Tulsiani, Alexei A. Efros, and Jitendra Malik. Multi-view consistency as supervisory signal for learning shape and pose prediction. In Computer V ision and P attern Recognition (CVPR) , 2018. 2 [18] Shubham T ulsiani, Tinghui Zhou, Alexei A. Efros, and Ji- tendra Malik. Multi-view supervision for single-view recon- struction via differentiable ray consistency . In Computer V i- sion and P attern Re gognition (CVPR) , 2017. 2 [19] Zhirong W u, Shuran Song, Aditya Khosla, Fisher Y u, Lin- guang Zhang, Xiaoou T ang, and Jianxiong Xiao. 3D ShapeNets: A deep representation for volumetric shapes. In Computer V ision and P attern Recognition (CVPR) , 2015. 6 , 12 [20] Xinchen Y an, Jimei Y ang, Ersin Y umer, Y ijie Guo, and Honglak Lee. Perspecti ve transformer nets: Learning single- view 3d object reconstruction without 3d supervision. In Ad- vances in Neural Information Pr ocessing Systems 29 , pages 1696–1704. 2016. 2 [21] Y aoqing Y ang, Chen Feng, Y iru Shen, and Dong Tian. Fold- ingNet: Point cloud auto-encoder via deep grid deformation. In Computer V ision and P at tern Recognition (CVPR) , 2018. 4 [22] Y ongheng Zhao, T olg a Birdal, Haowen Deng, and Federico T ombari. 3D point capsule networks. In Conference on Com- puter V ision and P attern Recognition (CVPR) , 2019. 2 , 8 , 12 [23] T inghui Zhou, Matthe w Bro wn, Noah Snavely , and David G. Lowe. Unsupervised learning of depth and ego-motion from video. In CVPR , 2017. 2 [24] Rui Zhu, Hamed Kiani Galoogahi, Chaoyang W ang, and Si- mon Lucey . Rethinking reprojection: Closing the loop for pose-aware shape reconstruction from a single image. In CVPR , pages 57–65, 2017. 2 10 A ppendices A Details f or the P ointsT oParts Model In this section, we describe the network architecture and training details for the first layer of our model which en- codes a point cloud as a set of part capsules. A.1 Architectur e Pose-V oting Network The pose-voting network Q con- sists of an embedding network Q embed and a projection net- work Q project . Both networks are made of ResNet blocks. A ResNet block takes the follo wing form: Res D ( x ) = Relu ( x + W 2 Relu ( W 1 x )) where x is an N -dimensional v ector , W 1 is an N × D ma- trix, and W 2 is a D × D matrix. Q embed consists of a linear projection of a 3D point into 64-dimensions, follo wed by a Relu non-linearity , followed by 3 Res 64 blocks: Q embed : 3 → 64 → Relu → Res 64 → Res 64 → Res 64 , Q project takes the pooled embeddings as input and applies the following operations: Q project : 64 → 64 → Relu → Res 64 → Res 64 → Res 64 → 7 The 7-D output is interpreted as a pose vote : 3 (translation vector) + 4 (rotation quaternion). Featur e-V oting Network The design of F embed is the same as that of Q embed . The design of F project is also the same as Q project , except that instead of projecting to 7- dimensions, the result is projected to 8 dimensions and is interpreted as a real-valued percept (no non-linearity is ap- plied). F embed :3 → 64 → Relu → Res 64 → Res 64 → Res 64 F project :64 → 64 → Relu → Res 64 → Res 64 → Res 64 → 8 Decoding Network The decoding network G takes the form G : [64 + 2] → 64 → Relu → Res 64 → 3 , where [64 + 2] represents the concatenation of a 64-D fea- ture with a point ( x, y ) sampled from a unit square. A.2 T raining The model is trained with AD AM using a mini-batch size of 32, starting with a learning rate of 0 . 001 and decaying it by a factor of 0 . 1 after 20K and 100K updates. A very low L2 decay of 10 − 7 is used for all parameters. The random viewpoints used in Multi-V iew Agreement are generated by adding a perturbation noise that is randomly sampled in [ − 45 ◦ , 45 ◦ ] . The input consists of 2048 points which are translated (by a random vector in [ − 1 , 1] 3 ) and rotated (about a random axis and random angle [ − 180 ◦ , 180 ◦ ] ) as a form of data augmentation. 16 part capsules are used, each with an 8-dimensional percept. 4 random vie ws are used per capsule. Each part capsule is decoded by sampling M = 256 points in a unit square. During training, 3 itera- tions of routing were done. W e found that back-propagating gradients through the routing iterations did not help perfor - mance. So for all the results in the paper , we trained our model by obtaining the point-to-part routing R (using 2 it- erations), doing one application of the encoder , one of the decoder , and backpropagating through those last two appli- cations only . B Details for the PartsT oObject Model In this section, we describe the network architecture and training details for the model that learns to represent an ob- ject as a single capsule. B.1 Architectur e Pose-V oting Network The network Q embed takes the fol- lowing form, Q embed : [ D + 7] → 1024 → Relu → Res 1024 × 3 where D = 8 is the dimensionality of each part capsule’ s feature component, [ D + 7] represents the concatenation of the feature and pose components and ResNet D × 3 repre- sents 3 ResNet D blocks applied in sequence (similar to the first layer). Q project takes the form: Q project : 1024 → 1024 → Relu → Res 1024 × 3 → 7 Featur e-V oting Network The design of F embed is the same as that of Q embed . The design of F project is also the same as Q project , except that instead of projecting to 7- dimensions, the result is projected to 1024 dimensions and is interpreted as a real-valued percept (no non-linearity is applied). F embed :[ D + 7] → 1024 → Relu → Res 1024 × 3 F project :1024 → 1024 → Relu → Res 1024 × 3 → 1024 11 Decoding Network The decoding network G maps a 1024-dimensional object percept to J = 16 parts. W e found that it worked best to train a separate decoder for each part capsule. Therefore, G consists of ( G 1 , G 2 , . . . , G J ) , where G j : 1024 → 256 → Relu → ResNet 256 × 4 → [ D + 7] . B.2 T raining The model is trained with AD AM using a mini-batch size of 32, starting with a learning rate of 10 − 4 and decaying it by a factor of 0 . 1 after 50K and 100K updates. A low L2 decay of 10 − 7 is used for all parameters. The random viewpoints are generated by adding perturbation noise that is randomly sampled in [ − θ, θ ] , where θ starts of f at 45 ◦ and is increased linearly during training to 180 ◦ starting at 10K updates and ending at 50K. 4 random vie ws were used, and 2 also gave similar results. The weight λ = 0 . 01 worked well for combining the Chamfer loss and L part . W e found that λ = 0 actually worked just as good in terms of the pose equi v ariance/in v ariance experiments, but λ = 0 . 01 led to better reconstructions. When training the object capsule layer , the part capsule layer was pre-trained and kept fixed. 3 iterations were done in the part capsule layer for gener- ating the input capsules as well as for generating the target capsules. C Datasets ShapeNet [ 3 ] was used for training and ModelNet40 [ 19 ] for e valuation. For both datasets, we used pre-processed point clouds provided by Zhao et al. [ 22 ] with their 3D Point Capsule Network work. Each object consists of 2048 points sampled uniformly at random on the surface of the object. A validation set of 5000 randomly chosen objects was held out from the ShapeNet dataset. The remaining 52,448 objects were used for training. W e used the test set of the ModelNet40 dataset for ev aluating pose in v ariance (2468 objects). For the pose equi variance ev aluation, we only used the intersection of this test set with the likely- asymmetric classes from ModelNet10 (bed, chair , sof a, toi- let, monitor) to coincide with the setup from QE-Net [ 1 ]. D Implementation The model was implemented using PyT orch [ 14 ]. The train- ing was done on a single NVIDIA V100 GPU with 32GB memory . It took 100K iterations to train the first model (fe w hours) and 500K for the second layer (half a day). W e are planning to make our implementation publicly a vailable. E Additional V isualizations Figure 7 and Figure 8 sho w reconstructions obtained by our model. W e visualize reconstructions from a single layer au- toencoder (points → part capsules → points), as well as reconstructions from the full two-layer model (points → part capsules → object capsule → part capsules → points). These objects are taken from the v alidation set that was used during training (subset of ShapeNet). The first example in Figure 7 shows an interesting failure case, where the ob- ject capsule model substituted four legs in the place of the two present in the input. Overall, the reconstructions from the single-layer model look much better than the two-layer model. This is because the single layer model is only mod- eling the small parts indi vidually , while the two-layer model has to model the appearance of all the parts and their poses. 12 A p p l e C on f i d en ti a l –I n t er n a l U s e On l y As points Input 3D point cloud As surfaces Reconstruction from points parts points Reconstruction from points parts object parts points As points As surfaces → → → → → → Figure 7: Reconstructions from the model. The first column sho ws the input point cloud. The second column sho ws reconstructions from the PointsT oParts model represented as 3D points. The third column sho ws the same reconstructions, visualized as 3D surfaces. The fourth and fifth columns show reconstructions from the object-le v el capsule (as points and surfaces respecti vely). 13 A p p l e C on f i d en ti a l –I n t er n a l U s e On l y As points Input 3D point cloud As surfaces Reconstruction from points parts points Reconstruction from points parts object parts points As points As surfaces → → → → → → Figure 8: Reconstructions from the model. The first column sho ws the input point cloud. The second column sho ws reconstructions from the PointsT oParts model represented as 3D points. The third column sho ws the same reconstructions, visualized as 3D surfaces. The fourth and fifth columns show reconstructions from the object-le v el capsule (as points and surfaces respecti vely). 14
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment