Dynamic Droop Approach for Storage-based Frequency Control
Transient frequency dips that follow sudden power imbalances –frequency Nadir– represent a big challenge for frequency stability of low-inertia power systems. Since low inertia is identified as one of the causes for deep frequency Nadir, virtual inertia, which is provided by energy storage units, is said to be one of the solutions to the problem. In the present paper, we propose a new method for frequency control with energy storage systems (ESS), called dynamic droop control (iDroop), that can completely eliminate frequency Nadir during transients. Nadir elimination allows us to perform frequency stability assessment without the need for direct numerical simulations of system dynamics. We make a direct comparison of our developed strategy with the usual control approaches –virtual inertia (VI) and droop control (DC)– and show that iDroop is more effective than both in eliminating the Nadir. More precisely, iDroop achieves the Nadir elimination under significantly lower gains than virtual inertia and requires almost $40%$ less storage power capacity to implement the control. Moreover, we show that rather unrealistic control gains are required for virtual inertia in order to achieve Nadir elimination.
💡 Research Summary
**
The paper addresses the critical issue of frequency Nadir—deep transient frequency dips that occur after sudden power imbalances—in low‑inertia power systems, which are becoming increasingly common as renewable generation replaces synchronous machines. Traditional remedies involve using inverter‑interfaced energy storage systems (ESS) with either droop (proportional) control or virtual inertia (derivative) control. Droop control alone cannot eliminate the Nadir because, under low inertia, the required inverse droop gain becomes infeasible. Virtual inertia can theoretically remove the Nadir, but it demands an unrealistically large virtual inertia constant (m_v); the analysis shows that (m_v) must be on the order of 30 times the physical system inertia, leading to excessive power‑rating requirements, long settling times, and heightened sensitivity to measurement noise and communication delays.
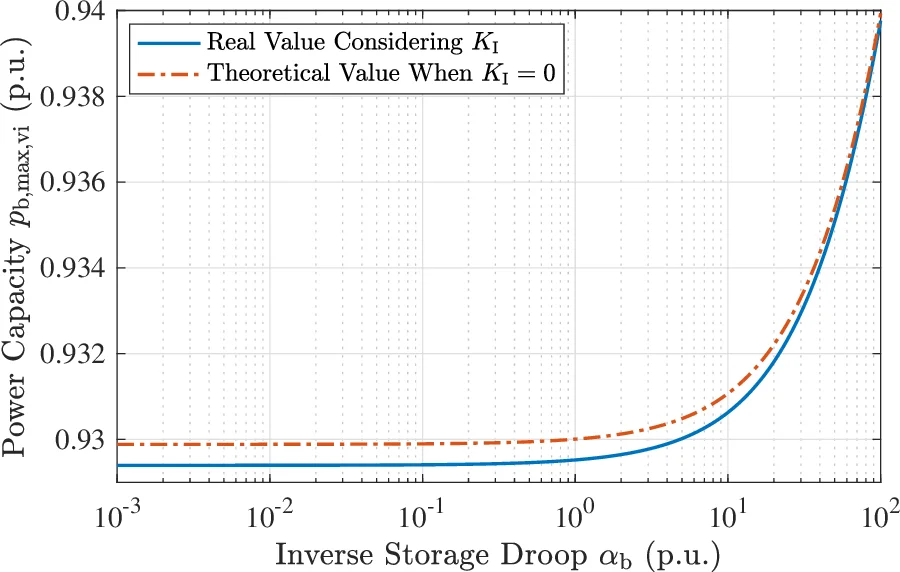
To overcome these limitations, the authors propose a dynamic droop control, termed iDroop, which is a first‑order controller with transfer function (\hat c_{iD}(s) = -\frac{k}{\tau s + 1}). By selecting the time constant (\tau) and gain (k) appropriately, the overall system dynamics become first‑order, guaranteeing a monotonic frequency response that never overshoots—hence the Nadir is completely eliminated. The paper derives closed‑form expressions for the minimum storage power rating (p_{b,\max}) and energy capacity (E_{b,\max}) needed to achieve Nadir elimination with iDroop. Compared with virtual inertia, iDroop achieves the same Nadir‑free performance with roughly 40 % lower power rating and with control gains that are well within realistic hardware limits.
The authors validate the approach using a single‑area model of the Great Britain power system (base power 32 GW, inertia constant (H = 2.19) s, maximum disturbance (\Delta P = 1.8) GW). Simulations show that traditional droop control leaves a large Nadir, virtual inertia removes the Nadir only at the cost of a massive inertia constant and high power peaks, while iDroop eliminates the Nadir with modest gains, lower peak power, and reduced energy consumption. Moreover, because iDroop’s control law is purely proportional with a first‑order lag, it is far less vulnerable to measurement noise and time delays than the derivative‑heavy virtual inertia.
In conclusion, iDroop offers a practical, cost‑effective solution for frequency support in low‑inertia grids. It reduces the required storage power and energy capacity, simplifies controller design, and avoids the drawbacks of virtual inertia. The paper suggests future work on multi‑area extensions, nonlinear load dynamics, and hardware‑in‑the‑loop testing to further confirm the robustness and scalability of the iDroop concept.
Comments & Academic Discussion
Loading comments...
Leave a Comment