A Software-Defined Opto-Acoustic Network Architecture for Internet of Underwater Things
In this paper, we envision a hybrid opto-acoustic network design for the internet of underwater things (IoUT). Software-defined underwater networking (SDUN) is presented as an enabler of hybridizing benefits of optic and acoustic systems and adapting…
Authors: Abdulkadir Celik, Nasir Saeed, Basem Shihada
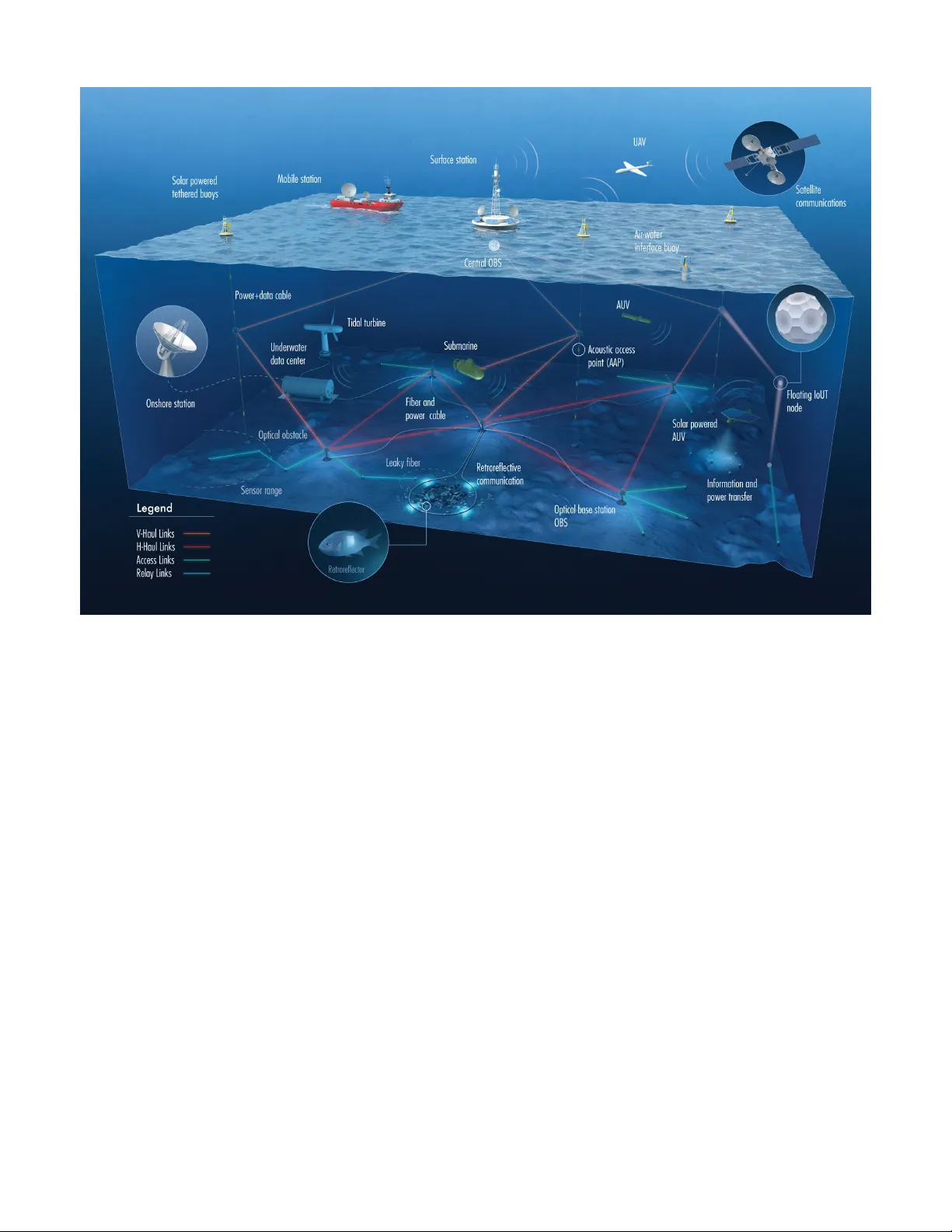
1 A Software-Defined Opto-Acoustic Netw ork Architecture for Internet of Underwater Things Abdulkadir Celik, Member , IEEE, Nasir Saeed, Senior Member , IEEE, Basem Shihada, Senior Member , IEEE, T areq Y . Al-Naf fouri, Senior Member , IEEE, and Mohamed-Slim Alouini, F ellow , IEEE Abstract —In this paper , we en vision a hybrid opto-acoustic network design f or the internet of underwater things (IoUT). Software-defined underwater networking (SDUN) is presented as an enabler of hybridizing benefits of optic and acoustic systems and adapting IoUT nodes to the challenging and dynamically changing underwater en vironment. W e explain inextricably in- terwov en r elations among functionalities of differ ent lay ers and analyze their impacts on k ey network attributes. Network func- tion virtualization (NFV) concept is then introduced to realize application specific cross-layer pr otocol suites through an NFV management and orchestration system. W e finally discuss how SDUN and NFV can slice available network resources as per the diver ging service demands of different underwater applications. Such a re volutionary ar chitectural paradigm shift is not only a cure f or chr onicle underwater netw orking pr oblems but also a way of smoothly integrating IoUT and IoT ecosystems. I . I N T RO D U C T I O N T H E internet of things (IoT) is a technological rev olution tow ards integrating physical and digital worlds by in- terconnecting smart objects to enhance the quality of life in all aspects. Communication netw orks under go the ne xt major change to wards fifth-generation (5G) networks to realize this rev olution. L ying at the heart of this e volutionary step, network function virtualization (NFV) and software-defined networking (SDN) are recognized as ke y enablers of a flexible, scalable, agile, and programmable netw ork platform [1]. Howe ver , current efforts mostly focus on dev eloping ter- restrial IoT solutions without gi ving suf ficient notice on the internet of underwater things (IoUT) applications. Noting that a continuous body of water covers approximately 71% of the Earth’ s surface, oceans provide great benefits to the hu- mankind, including climate regulation, food supply , transporta- tion, natural resources, recreation, and medicine. Moreover , oceanic businesses contrib ute more than 500 billion US dollars to the world economy . Hence, IoUT can mark a new era for scientific, industrial, and military underwater applications, including environmental monitoring, of fshore exploration, dis- aster prevention, tactical surveillance, and assisted navigation. Nev ertheless, 95% of the oceans are still unexplored because of the peculiarities of underwater communications, network- ing, and localization [2]. In this respect, IoUT significantly differs from its terrestrial counterpart (i.e., IoT) in almost ev ery aspect of the network architecture design. First of all, the aquatic medium poses a variety of daunting challenges Authors are with computer , electrical, and mathematical sciences & en- gineering (CEMSE) Di vision at King Abdullah Univ ersity of Science and T echnology (KA UST), Thuwal, KSA. based on the underlying communication system. Although radio frequenc y (RF) waves can reach desirable propagation speeds by tolerating turbulent and turbid nature of water , conductivity restricts their transmission range to ten meters and operational bandwidth to 30-300 Hz. For these reasons, underwater RF modules are costly , power -hungry , and b ulky due to large antenna size requirements. On the other hand, underwater acoustic communication (U A C) is praised and widely used thanks to their sev eral kilometers long communication ranges. Howe ver , underwater acoustic networks (UANs) suffer from low achiev able rates (10-50 Kbps) and high-variable delay because of limited bandwidth and low propagation speed (1500 m/s) of acoustic signals, respectiv ely . U A C is also susceptible to multi-path fading, Doppler spread, and ambient noise caused by hydrody- namics and vessel traffic [3]. In return for limited transmission ranges (50-100 m), optical wireless communication (OWC) can provide desirable data rates in the order of Gbps and low latency thanks to the high propagation speed of light in the aqua ( « 2 . 55 ˆ 10 8 m/s). The transmission loss of light is primarily characterized by absorption and scattering effects, which constitute range-beamwidth tradeoff and vary with water types and depths. In particular , blue and green wa velengths hav e shown to be more resilient in clear and coastal waters, respectiv ely . As UA C and OWC complement each other in many ways, the full benefit can be obtained by hybridizing UANs and underwater optical wireless networks (UONs). In this paper , we accordingly en vision an underwater opto- acoustic network (UOAN) architecture for IoUT ecosystem. For the sake of clarity , UO AN is first presented in a classical layered fashion to describe underlying network infrastructure and identify network functions associated with each layer . Thereafter , we provide recent advances and present challenges by pointing out ine xtricably interwov en relations among dif fer- ent network functions. Then, we discuss how NFV and SDN can be used to uniformly and coherently orchestrate various network functions and resources across the multiple layers of the UO AN architecture. W e finally conclude the paper with prospects of UOANs for IoUT applications. I I . A N O P T O - A C O U S T I C N E T W O R K A R C H I T E C T U R E UO ANs can be designed either in an infrastructural, ad- hoc, or mixed fashion, as illustrated in Fig. 1. In the former , optical base stations (OBSs) and acoustic access points (AAPs) provide cov erage to IoUT nodes in their vicinity and serve as a 2 Fig. 1: The en visioned software-defined opto-acoustic network architecture. gate way to the rest of the network. In the latter , IoUT nodes are scattered across the network, and connectivity is established by the participation of IoUT nodes along a routing path, that is dynamically and distrib utively determined as per network conditions. In the mixed scenario, a vailable infrastructure can be extended in both vertical and horizontal directions by using ad-hoc IoUT nodes. In what follows, we consider a mixed architecture in a layer -by-layer approach: The per ception layer consists of sensors for data collection; actuators to interact with the physical world; and autonomous underwater vehicles (A UVs) to perform collaborati ve mobile tasks. Sensors can be designed to sense sev eral physical phenomena (e.g., temperature, salinity , pollution, pH le vels, etc.), store collected data in memory , and transmit observ ations to a target destination using U AC and/or UOC modems. IoUT nodes can also use passiv e transceivers such as acoustic tags, passiv e inte grated transponders, optical retro-reflectors, which are especially suitable for cost-ef fective sensors with limited size and battery . On the other hand, A UVs are sophisti- cated platforms comprising of subsystems such as on-board computation and data processing; positioning-acquisitioning- and-tracking (P A T) mechanisms, navigation systems; and a variety of sensors/actuators. A UVs can also aggregate data from remote sensors using backscatter communication, as shown in Fig. 1. A UVs are able to operate at different depths based on hardware specifications and are generally po wered by rechargeable batteries that can be charged by on-board solar panels. The network layer is responsible for interconnection of all sub-systems as well as data collection, dissemination, and transportation. It mainly consists of access and transport networks. The access network comprises of links among per - ception layer and transport network components such as OBSs and AAPs. OBSs are in the shape of a multi-faceted sphere (i.e., geodesic polyhedral) and can provide omnidirectional connectivity by transceiv ers built at each face. Seabed OBSs can communicate with each other with fibers deployed in the seabed and/or horizontal collimated light-beams (i.e., H-Haul links). On the other hand, they can use vertical collimated light-beams (i.e., V -Haul links) to reach the central OBS via intermediate OBSs which are hanged on the tether of solar- powered buo ys. While a tidal turbine can power seabed OBSs, the central and intermediate OBSs can be powered by solar panels of the surf ace station and tethered buoys, respecti vely . Solar-po wered tethered buo ys can also provide power and data to se veral AAPs down to the moor at the seabed. Air-water interface buoys may be used as an alternative solution. All these sea-surface systems connect IoUT nodes to the terrestrial IoT ecosystem via mobile stations, unmanned aerial v ehicles (U A Vs), and satellites. The middlewar e layer provides a mediating language be- tween components, interfaces, protocols, and IoUT applica- 3 tions. It is indeed an abstraction layer that masks the lo wer layer processes from the applications. Therefore, it is re- sponsible for supporting efficient network management tools that can observe and manipulate the software and hardware features of the lower layers. The middlew are should assure that communication pairs are identified, reachable, and ready to exchange data. Moreover , it can authenticate nodes for secure communication and establish an agreement about data integrity and error recovery . The middleware architecture can follow a service-oriented approach that decomposes the com- plex IoUT architecture into well-defined simpler subsystems operating on common interfaces and standard protocols such as routing and transport protocols, localization and tracking, energy ef ficiency , security , and pri vac y . The application layer handles the final tasks of storing, organizing, processing and sharing the data aggregated from the lower layers. Execution of these tasks depends on appli- cation requirements which may differ from one to another . Unfortunately , existing underwater networks are generally designed for a specific application using this ossified layered architecture and built upon non-reconfigurable hardware-based proprietary equipment and services. As a remedy , software- defined IoUT nodes can enable a fle xible UOAN architecture by reprogramming the hardware with an open and standardized interface (e.g., OpenFlow) that is compatible with multiple vendor -platforms. This paves the way for the novel SDM concept that characterizes the operation of network hardware by abstracting the control from data (infrastructure) plane [c.f. Fig. 2]. Considering the heavy burden of upgrading the firmware by retrie ving underwater equipment from deep wa- ters, software-defined underwater network (SDUN) is indeed a radical paradigm shift for adapting to dynamic underwater en vironment and evolving to embrace emerging technolo- gies [4]. Thanks to service virtualization support of cloud computation, network functions can be virtualized to provide flexibility , agility , and scalability as per the di verging needs of different applications. Hence, an NFV management and orchestration (MANO) system is required to go vern virtual- ized infrastructure and SDUN. Indeed, MANO is an elegant solution to provide new services, maintaining existing services, and efficiently utilizing network resources. Howe ver , integrating SDUN and NFV technologies requires a centralized controller unit with significant computational power and data storage. F ortunately , these demands can be met with a tidal turbine-po wered underwater data center (UDC), as sho wn in Fig. 1. Microsoft has recently launched project Natick (https://natick.research.microsoft.com) where a cylin- drical tube-shaped UDC was sunk into the sea for the sake of significantly reduced cooling costs and of fshore rene wable energy sources. I I I . S D U N + N F V: E N A B L E R S O F A P P L I C A T I O N S P E C I FI C C RO S S - L AY E R P R OT O C O L S In this section, we present recent advances and present challenges of UOANs. As a potential solution, we discuss ho w marriage of SDUN and NFV can enable cross-layer protocol suites tailored to the needs of different applications. Fig. 2: A schematic diagram of integrated SDUN and NFV . A. P erception Layer Ener gy Shortage: IoUT nodes are expected to have a higher power budget to mitigate transmission loses and to compensate channel impediments by using sophisticated transceiv ers and signal processing. Considering the engineer- ing challenges in charging and replacing batteries, energy self- sustainability driven lifetime maximization must be one of the leading design criteria. Indeed, microbial fuel cells and piezoelectric polymer strips can con vert metabolic acti vities of bacteria and water flow ener gy into electrical po wer, respec- tiv ely [5]. Alternati vely , solar-po wered A UVs may be used for simultaneous power and data transfer [Fig. 1]. By using a solar panel as a harvester and receiv er, blue lasers have been sho wn to deli ver around 7 mW power per minute and 0.5 Mbps data at the same time [6]. Even though lasers allow power transfer at longer distances, LEDs can provide a higher power rate since solar panels are designed to exploit entire visible light spectrum. Har dwar e Limitation: In addition to the hardware com- plexity , the monetary cost of waterproof IoUT equipment may be high due to the need for extra protection from corrosion and fouling. Noting that commercially a vailable lo w-cost acoustic modems have prices ranging from hundreds to thousand US dollars, mass production of optical modems can put more com- petitiv e price tags. As a result of the range-beamwidth tradeof f, light-emitting diodes (LEDs) can communicate with many surrounding nodes whereas a razor-sharp laser beam can reach distant users at desirable rates. F or mobile nodes, lasers require effecti ve P A T mechanisms which increase monetary cost, power consumption, and form factor of IoUT nodes. Hence, P A T should be considered only for A UVs rather than low- cost ad-hoc IoUT nodes. Similar to OBSs, ad-hoc IoUT nodes can also be designed as multifaceted transceiv ers to mitigate the need for P A T mechanisms by realizing omnidirectional communications. For instance, a truncated icosidodecahedron shaped node can host eight transmitters and receiv ers with a π { 4 di vergence angle and field-of-view (FoV), respecti vely . 4 PHY & MA C Issues: Software-Defined Open-Flow en- abled IoUT nodes can overcome the above limitations by adapting physical (PHY) and medium access control (MA C) layer functions to the ever -changing underwater en vironment. As per the needs, the y can prefer a suitable hardware front- end (e.g., acoustic or optic) and adjust the baseband processing parameters (e.g., modulation, coding, rate, po wer , div ergence angle). For instance, the need for P A T mechanisms can be eliminated by adapting beamwidths to achieve robust and reliable links [7]. Frequency-di vision multiple access (FDMA) and time-division multiple access (TDMA) are not suitable for U A Cs because of the limited bandwidth and long-time guards, respectiv ely . On the contrary , code-division multiple access (CDMA) is preferable thanks to its robustness against the multipath and frequency-selectiv e fading ef fects. Indeed, the spectral ef ficiency of U A C can be further enhanced by using code-domain non-orthogonal multiple access (NOMA). Like- wise, optical CDMA can improv e UOC performance thanks to its spectral efficient and asynchronous nature [8]. UOCs can also benefit from optical schemes such as wavelength- division multiplexing (WDM). By combining of NOMA and WDM, NOMA can reliev e multiple access interference by multiplexing se veral nodes into each wavelength provided by WDM. This combination is especially promising to serve a large number of nodes and realize dif ferent virtual networks on av ailable network resources. B. Network Layer The network layer tackles tw o types of traf fic; control and data. Thanks to omnidirectional and long-range communi- cations, UA C links can ubiquitously deliv er control signals to almost all destinations. Although high-speed lo w-latency O WC links are more suitable to carry out the data traf- fic, they can also mitigate the distance-dependent capacity of U AC links. In this way , U ANs and UONs complement one another to utilize the advantages of both. Nevertheless, multihop communication is still necessary to o vercome high latency and short range of single-hop U AC and OWC links, respectiv ely . Multihop communication can enhance the end- to-end (E2E) system performance by expanding the co verage area, extending the communication range, impro ving energy efficienc y , and boosting network connectivity . Routing: The full benefits of multihop communication can only be gained with an ef fective routing algorithm that accounts for the underwater channel characteristics. Although there exist promising routing protocols proposed for UANs, they are not readily applicable for UONs due to the directivity of light-beams. In this regard, geographical routing protocols are especially suitable for UONs as location information is already needed for pointing between the transcei vers. In [7], we dev eloped centralized routing protocols by tailoring shortest-path algorithms to different objectiv es (e.g., rate, error , power). Our in vestigations hav e shown that P A T has a significant impact on network performance, especially when location uncertainty and water turbidity increases. Unlik e the con ventional routing techniques that unicast packets to a single forwarder , opportunistic routing (OR) can reap the full benefits of broadcast nature of O WCs by targeting a set of candidate relays at each hop. The OR improves the packet deli very ratio as the likelihood of ha ving at least one successful packet reception is much higher than that in unicast routing. Hence, OR is especially suitable for the underwater en vironment as the link connectivity can be disrupted easily due to the underwater channel impediments (e.g., pointing errors, mis- alignment, turb ulence, etc.) and sea creatures passing through the transceiv ersâ ˘ A ´ Z line-of-sight. Connectivity: As a result of the cost and deployment challenges, IoUT node density is expected to be sparse com- pared to that of IoT . Network density is a key determinant for the degree of connectivity that impacts many network performance metrics such as reliability , routing, capacity , and localization. Indeed, U ANs can relie ve node sparsity thanks to omnidirectional and long-range UA Cs. On the other hand, UON connectivity can drastically decrease with the node sparsity as P A T is not an av ailable option for all nodes. T o see the impacts of beamwidth and multifaceted IoUT nodes as a potential solution, let us consider an ad-hoc UON consisting of 50 nodes which are randomly distributed ov er a water volume of 500 m 3 . Follo wing the Beer-Lambert channel model [2], Fig. 3a depicts the av erage E2E-Rate from IoUT nodes to a surface station located at the origin. By setting the bit error rate to forward error control threshold, the routing paths are determined to maximize the E2E capacity using the widest- path algorithm. Increasing the number of faces has a significant impact for two reasons: 1) A larger number of f aces decreases div ergence and FoV angles, which results in higher received power as well as concentrator gain; and 2) The incoming lightbeam can be acquired by multiple faces looking toward the transmitter , that naturally enhances the performance thanks to a higher reception di versity . In this way , multifaceted IoUT nodes can mitig ate the link failures due to the pointing and alignment disruptions caused by random movements of sea surface or deep currents. Like wise, Fig. 3b demonstrates the probability of connectivity that assures an E2E-Rate no less than 0.1 Mbps for all IoUT nodes. Fig. 3 also shows the performance under different water types such that negati ve impacts of absorption and scattering effects that exacerbate with the turbidity of water . Reliability: Ultra-reliable low-latency communications (URLLCs) require traffic to be forwarded with a limited packet loss at a predetermined rate. During transportation, packet losses may occur in shado w zones where temporary connectivity losses and high bit error rates are caused by se vere channel conditions and/or network congestion. In such cases, a transport protocol is required to check corrupted data using error correction codes, order packets, v erify the correct recep- tion by A CK/N ACK messages, and initiate retransmission lost packets. Transport protocol can be either connection-oriented, e.g., transmission control protocol (TCP), or connectionless, e.g., user datagram protocol (UDP). Even though the TCP considers the congestion as the only reason for packet loss, connection loss is quite common due to obstruction, pointing, and misalignment events. T o distinguish between the two, connection-oriented underwater transport protocols should in- teract with the lo wer layers to leverage critical information. On 5 (a) (b) (c) Fig. 3: The impact of diver gence angle on network performance: a) E2E-Rate, b) Connectivity , and c) Localization error . the other side, as a simple connectionless protocol, the UDP cannot guarantee ordered and correct packet deliv ery . The minimum handshaking preference of the UDP exposes IoUT nodes to the unreliability of the underwater networks. Hence, UDP is much more suitable for peer-to-peer transmission ov er quasi-stationary channel conditions such as transmission between nearby ground IoUT nodes or between A UVs and IoUT nodes [c.f. Fig. 1]. Congestion: Network congestion is caused by over - subscription of many flows to links with a capacity less than required. In such cases, routing and transport protocols must collaborativ ely adapt congestion windo w scale or flow rate to av oid buf fer overrun along the path tow ard the destination. Since the sliding congestion window heavily depends on the precise estimation of round trip time (R TT), important TCP flow control mechanisms (e.g., timestamps to order packets and retransmission timeout) are prone to the high and variable delay of low-speed U A Cs. Even though this can be mitigated by lo w propagation and transmission delay of O WCs, transport and routing protocols should identify link and node failures caused by changes in channel states and network topology . Like wise, rate-adaptiv e schemes (e.g., proportional rate reduc- tion) adjust the transmission rate of the source to control the congestion by means of feedback control messages, which are also susceptible to long and highly variable R TTs. C. Middlewar e Layer The layered approach was originally designed for rigid (non-programmable) infrastructure via isolation of network functions. Such simplification of the network management yields a sub-optimal performance, especially in harsh and dy- namic en vironments since these functions are indeed joint and heavily depend on each other . By virtue of integrating SDUN and NFV concepts, these closely intertwined associations among the layers can be captured and governed by MANO interface. The MANO can be thought of as a sophisticated cross-layer protocol suite that orchestrates network functions by collecting v aluable information and making critical deci- sions. While MANO can allow IoUT nodes to locally manage PHY & MA C functions to address rapid changes of the underwater en vironment, it should harmonize the cooperation among the higher layers, and then coordinate with nodes to instruct necessary local changes based on the global netw ork view . In addition to behaving as a cross-layer protocol suite, the MANO should also provide the follo wing services: F ault Recovery: Since connectivity and reliability are the main delimiters of UOANs, predicting and handling shadow zones are of vital importance. Even a single node failure can result in significant performance degradation if this node plays the role of a gateway by connecting two partitions of nodes, which is not surprising in sparse networks. In case of f ailure, the nodes should be able to recover themselves by means of b uilt-in self-or ganization and self-configuration algorithms. In the meanwhile, the MANO can handle ongoing traffic by steering it to an alternative routing path and help the faulty node to recov er if necessary . Once the node recov ers itself and a seamless connection is re-established, the traf fic can be restored on the original path. At this point, hybridizing optic and acoustic networks comes into prominence as ubiquitous connectivity of UA Cs can help MANO to sustain ACK/N A CK messaging between the nodes to recov er from shado w zones. Localization & T racking: Localization is of utmost im- portance because of three reasons: 1) For many applications, collected data is beneficial only if it is tagged with an accurate position; 2) Geographical routing schemes can operate with location estimates; and 3) P A T mechanisms can work effi- ciently if the location of transcei vers is known. In particular, network localization can provide the CPS with a general ov erview of the network, that can help to ov ercome congestion and connectivity loss. Unfortunately , the global positioning system (GPS) signals cannot propagate through the water due to the unique underwater channel characteristics. Noting that U AN localization literature is very well established, whereas recent UON localization schemes are designed based on either receiv ed signal strength (RSS) or time of arri val (T oA) based ranging techniques [2]. Regardless of the underlying channel, localization accuracy relies upon quantity and deployment of surface anchors whose locations are obtained by GPS. Hence, GPS error propagates throughout the network and degrades the o verall localization performance. As a result of strong winds and deep current, random mo vement of anchors and IoUT nodes cause additional uncertainty to the location estimates. At this juncture, we should also note that connectivity has a substantial impact on localization accuracy as having more measurements intuiti vely reduces the localization errors [9]. Therefore, hybridization of 6 U ANs and UONs can also improv e the localization to a great extent. Let us revisit the previous netw ork set up to observe the root mean square error (RMSE) of an RSS-based network localization with eight randomly located anchor nodes. Fig. 3c shows that U A C delivers better performance than the UOCs due to the higher connecti vity yielded from long-range om- nidirectional communications. This behavior is rev ersed only after surpassing a diver gence angle threshold as connecti vity enhances with longer transmission ranges thanks to narrower beamwidth and FoV . Finally , the opto-acoustic case shows the positiv e impact to wards a more precise localization, especially when UOC suffers from water turbidity . Furthermore, localization is of paramount importance for tracking algorithms which are needed for navigation, surveil- lance, A UV trajectory optimization, and animal monitoring. Even though tracking has con ventionally been implemented by using acoustic tags, retro-reflectiv e O WC can substantially im- prov e efficienc y . For instance, acoustically guided A UVs can also be identified by their retro-reflective tags whene ver the y pass nearby an optical IoUT node. Similarly , animal tracking can be realized by installing small-factor retro-reflecti ve tags on fish. In particular , leaky fibers can be wired around a fish habitat for the purpose of simultaneous illumination and communication [c.f. Fig. 1]. Resour ce Mana gement: The MANO has to manage two precious underwater resources; power and bandwidth. IoUT node lifetime can be significantly improved by energy-ef ficient PHY & MAC functions such as power control, bandwidth allocation, and retransmission scheduling. More importantly , a sleeping strategy can jointly be designed with an opportunistic transmission scheme to buf fer receiving traf fic during the sleep and wake up for sending at desirable network and channel conditions to save energy . The local sleeping strategies should be regulated by MANO to maintain a seamless connection for incoming traffic requests. Accordingly , routing algorithms should discover routes by considering the available energy and buf fer size of nodes along the path in coordination with lower and higher layer functions. D. Application Layer W ith the advent of network softwarization, multiple virtual networks (a.k.a. network slices) can operate on a shared physical SDUN infrastructure. Network slices can be regarded as self-contained and mutually-isolated logical networks with their own tailored network functions and resources. Hence, div erging service demands of different applications can be met on the same infrastructure since each slice is independently orchestrated as per its o wn service requirements. These ap- pealing features w ould incentivize multiple tenants to in vest in building SDUNs in a cost efficient manner cooperativ ely and effecti vely monetize this in vestment by renting SDUN to proliferating IoUT applications. In addition to middleware layer functions mentioned above, the MANO must also manage the following application layer issues: 1) Quality-of-service-and-e xperience; 2) Service reliability; 3) Charging and billing; 4) Network slice up- date/upgrade; and 5) VNF scaling, migration, and life-cycle management. In fact, de veloping these man y VNFs for each application is not a practical approach. Instead, the network should be sliced into application classes for which VNFs should be developed by accounting for common service char- acteristics. For instance, acoustic part of the UOAN can be considered as a single slice and dedicated for control signaling of the MANO. Lik ewise, data traf fic can be carried out o ver multiple slices which are allocated for different classes such as delay-tolerance, ultra-reliability , lo w-latency , high-bandwidth, etc. I V . C O N C L U S I O N S A N D F U T U R E R E S E A R C H D I R E C T I O N S In this paper , we have shared our vision tow ards UO ANs to ov ercome underwater en vironment hostility by reaping the full benefits of U ANs and O ANs. Instead of an ossified layered approach, we presented UO AN architecture in a cross-layer fashion and discussed entangled relations among different network functions. By merging SDUN & NFV domains, we also pointed out potential network virtualization-based solu- tions. In the remainder, we list some potential future research directions: Machine Learning: Existing channel models are either simplistic by ignoring some crucial factors or analytically intractable due to complex formulations. Indeed, data-driven machine learning (ML) techniques are an indispensable tool to complement these traditional mathematical models by adjust- ing model parameters based on actual water characteristics. In terrestrial networks, ML has already receiv ed significant atten- tion to select and optimize underlying physical layer functions such as modulation, coding, pointing, tracking. Power and bandwidth allocation can also be implemented based on ML tools by predicting dynamically changing channel conditions and traffic loads. Realizing all these features in a central unit yields a substantial communication overhead which may need for a notable portion of already limited network capacity . On the other hand, a fully distributed approach may place an intolerable burden on IoUT nodes with limited battery and computational power . Accordingly , a federated learning approach can strike a good balance between centralized and distributed solutions. In this case, IoUT nodes can act in- dependently based on exchanging local and global network states with the central unit. Federated learning can also be extended to higher layers for improving routing, reliability , connectivity , fault tolerance. Therefore, ML can be the enabler of a self-or ganizing, self-optimizing, and self-healing SDUN architecture. URLLC vs. Delay-T olerant Communications: URLLC applications pose great challenges on reliability and latency , which are generally conflicting design objectiv es. Howe ver , existing underwater research focuses on improving the ca- pacity of the underwater networks with little attention to URLLC. For real-time applications, the network slice and related functions must be engineered well to satisfy underwater URLLC requirements. On the contrary , some IoUT nodes may be located in remote areas for delay-tolerant applications. In this case, A UVs can play essential roles in collecting data and charging the IoUT nodes. Optimizing the A UV trajectory 7 for maximum energy efficiency and data collection is an interesting research direction. Moreover , flying networks (e.g., U A Vs, high altitude platforms) can provide global connectivity for surface elements (e.g., buoys, air-w ater interfaces, etc.) located outside of cellular cov erage. In this case, jointly coordinating U A Vs and A UVs would enable a more ef fectiv e data aggregation. OBS/AAP Deployment and Contr oller Placement: As the number of IoUT nodes and network size scales up, OBS/AAP deployment plays a crucial role in ke y network performance metrics. Deployment problem can be formulated to enhance delay , spectral and energy efficienc y , and connectivity . Station- ary OBSs/AAPs are also potential anchor nodes whose number and location may ha ve a direct impact on localization accu- racy . As the y are po wered with rene wable energy , stationary OBSs/AAPs could also be used as distrib uted controllers to ov ercome the limitations on reaching to the central single- central UDC. Alternativ ely , A UVs may be used as mobile controllers to mitigate network topology and traffic pattern changes. Like wise, floating air-water interfaces might serve as surface anchors and controllers to improv e overall network performance. Jointly optimizing number of controllers and their locations are challenging yet interesting problems to be in vestigated. Inte gration with 5G and Beyond: The lessons learned from merging SDN and NFV for 5G networks can be of great help to design the proposed IoUT network architecture. Since IoT is already provisioned as a slice of 5G networks, IoUT would be regarded as an extension to the IoT applications. In fact, many IoT applications (e.g., en vironmental monitoring, public health and safety , smart city , etc.) can work more ef fec- tiv ely by data and inference provided by IoUT applications. R E F E R E N C E S [1] F . Z. Y ousaf et al. , “NFV and SDN-key technology enablers for 5G networks, ” IEEE Journal on Selected Areas in Communications , vol. 35, no. 11, pp. 2468–2478, Nov . 2017. [2] N. Saeed et al. , “Underwater optical wireless communications, network- ing, and localization: A survey , ” Ad Hoc Networks , vol. 94, p. 101935, 2019. [3] I. F . Akyildiz et al. , “Underw ater acoustic sensor networks: research challenges, ” Ad Hoc Networks , vol. 3, no. 3, pp. 257 – 279, 2005. [4] ——, “Softwater: Software-defined networking for next-generation un- derwater communication systems, ” Ad Hoc Networks , v ol. 46, pp. 1 – 11, 2016. [5] N. Saeed et al. , “Localization of energy harvesting empowered under- water optical wireless sensor networks, ” IEEE Tr ans. W ireless Commun. , vol. 18, no. 5, pp. 2652–2663, May 2019. [6] J. Filho et al. , “T owards self-powered internet of underwater things devices, ” 2019. [7] A. Celik et al. , “End-to-end performance analysis of underwater optical wireless relaying and routing techniques under location uncertainty , ” IEEE Tr ans. W ireless Commun. , 2019. [8] F . Akhoundi et al. , “Cellular underwater wireless optical cdma network: Performance analysis and implementation concepts, ” IEEE T rans. Com- mun. , vol. 63, no. 3, pp. 882–891, Mar . 2015. [9] N. Saeed et al. , “Performance analysis of connectivity and localization in multi-hop underwater optical wireless sensor networks, ” IEEE Tr ans. Mobile Comput. , pp. 1–1, 2018. Abdulkadir Celik (S’14-M’16) received the Ph.D. in electrical and computer engineering from Io wa State Uni versity , Ames, IA, USA, in 2016. He is currently a postdoctoral fellow at CEMSE division of KA UST . Nasir Saeed (S’14-M’16-SM’19) receiv ed the Ph.D. degree in electronics and communication engineering from Hanyang University , Seoul, South K orea, in 2015. He is currently a postdoctoral fellow at CEMSE division of KA UST . Basem Shihada (SM’12) received the Ph.D. in computer science from Univ ersity of W aterloo, Ontario, Canada in 2007. He is currently an associate professor of CEMSE division at KA UST . T areq Y . Al-Naffouri (M’10-SM’18) received the Ph.D. degree in electrical engineering from Stanford Uni versity , Stanford, CA, USA, in 2004. He is currently an associate professor of CEMSE division at KA UST . Mohamed-Slim Alouini (S’94-M’98-SM’03-F’09) received the Ph.D. de- gree in Electrical Engineering from the California Institute of T echnology , Pasadena, CA, USA, in 1998. He is currently a full professor of CEMSE division at KA UST .
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment