Optimal L-Infinity Frequency Control in Microgrids Considering Actuator Saturation
Inverter-connected resources can improve transient stability in low-inertia grids by injecting active power to minimize system frequency deviations following disturbances. In practice, most generation and load disturbances are step changes and the en…
Authors: Daniel Tabas, Baosen Zhang
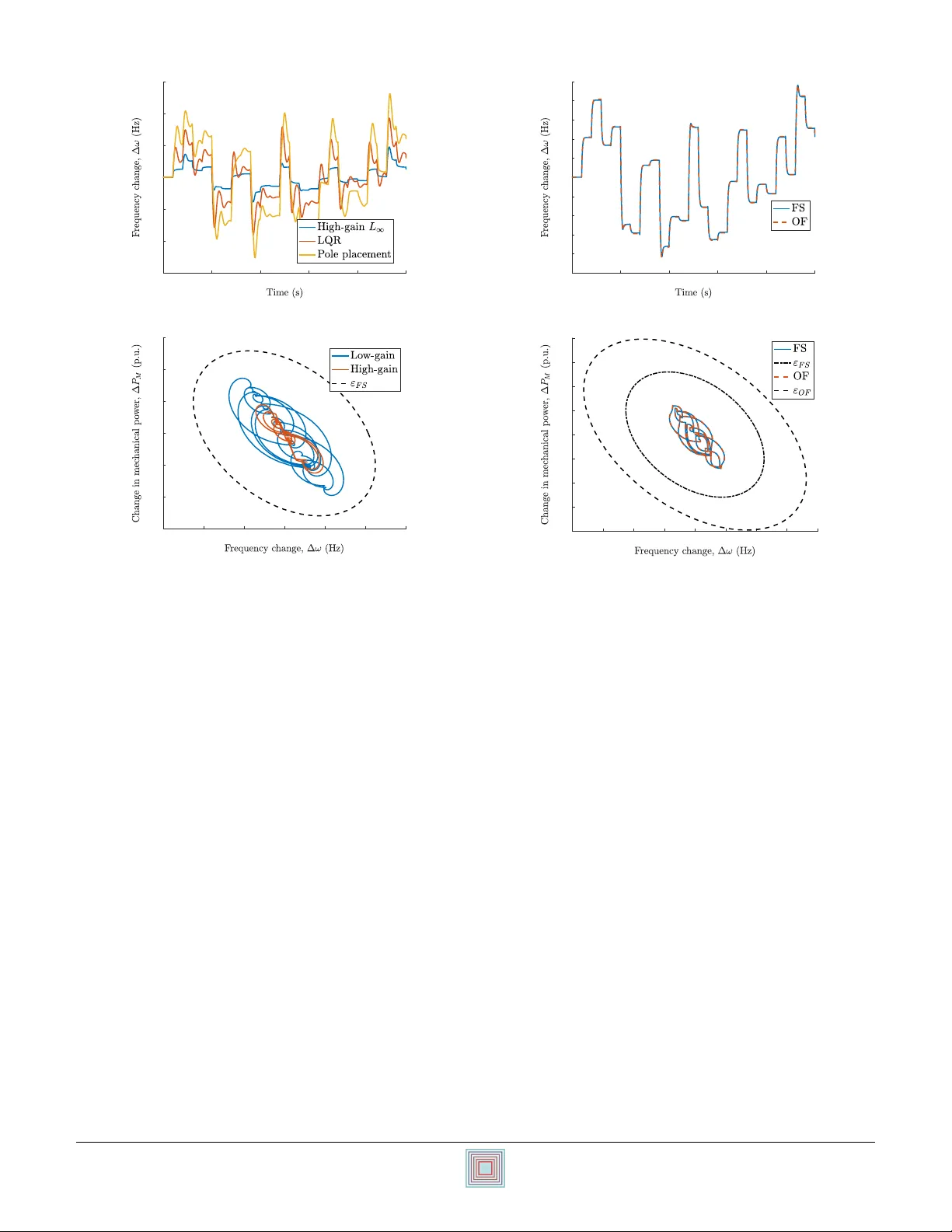
Optimal L ∞ Frequenc y Control in Microgrids Considering Actuator Saturation Daniel T abas and Baosen Zhang Department of Electrical and Computer Engineering Univ ersity of W ashington Seattle, W A 98195 { dtabas, zhangbao } @uw .edu Abstract —In verter -connected r esources can improve transient stability in low-inertia grids by injecting activ e power to minimize system frequency deviations follo wing disturbances. In practice, most generation and load disturbances are step changes and the engineering figure-of-merit is often the peak o vershoot in frequency resulting from these step disturbances. In addition, the in verter -connected resour ces tend to saturate much more easily than con ventional synchr onous machines. However , despite these challenges, standard controller designs must deal with averaged quantities through H 2 or H ∞ norms and must account for saturation in ad hoc manners. In this paper , we address these challenges by explicitly considering L ∞ control with saturation using a linear matrix inequality-based approach. W e show that this approach leads to significant impr ovements in stability performance. Index T erms — L ∞ control, LMIs, saturation, frequency stabil- ity I . I N T R O D U C T I O N As in verter -connected de vices such as wind turbines, PV arrays, and batteries displace conv entional synchronous gen- erators, they will lead to a reduction in mechanical inertia in the system. At the same time, rising lev els of v ariable renew able energy will create larger disturbances on the grid. Thus renewable energy resources place frequency stability under stress from tw o dif ferent directions. A po wer system that is unable to maintain operation close to nominal frequency in the face of high renewable penetration will be more prone to loss of synchronicity and subsequent loss of generation if new control strategies are not used. In verters bring unique adv antages to the control of the grid and can of fer performance characteristics that are more fa vorable than the conv entional inertia of synchronous ma- chines. In verter -connected energy resources such as battery energy storage systems can provide the flexibility needed to absorb fluctuations in net demand. Changing the power tracking point of in verter -connected wind turbines and PV arrays can contribute additional flexibility . These systems are advantageous because the po wer inv erters which serve as the interface between the generation and transmission systems can The authors are partially supported by the NSF Grant ECCS-1930605 and the Univ ersity of W ashington Clean Energy Institute. Controller sat( · ) Plant Disturbance q u Measurements r e y − ˆ y Fig. 1. Block diagram of a system with actuator saturation. In our setting, r is the reference frequency to be tracked under uncertain disturbances, where the actuators have saturation constraints. be controlled on much faster timescales than those on which grid electromechanical transients occur . In this paper , we present a method for controller synthesis considering two complexities encountered in power system frequency regulation. First, the proposed synthesis accounts for constraints on controller output corresponding to power limits on inv erters. Since in v erter power ratings are typically sev eral orders of magnitude smaller than those of synchronous machines [1], it can be expected that in v erters providing frequency support will often be operating at or near their power limit. Con ventional methods of frequency support such as droop control are designed without accounting for satura- tion, and in verters mimicking them (e.g., virtual synchronous machines) can suffer in real systems when saturation is un- av oidable. Figure 1 illustrates the configuration of a simple feedback system with actuator saturation. Second, the proposed synthesis minimizes the L ∞ -norm of the closed-loop system, since the ability of a power system to withstand disturbances is often ev aluated in terms of maximum ov ershoot rather than the H 2 or H ∞ norms commonly adopted in control literature [1]. It is the peak overshoot that deter - mines how close the full nonlinear system gets to its stability limit. The method of in v ariant ellipsoids arises as a natural way to deal with the joint complexities of actuator saturation and L ∞ norm minimization because it has been successfully applied to each of these problems indi vidually . The con ve xity of the linear matrix inequalities defining these inv ariant ellip- soids allows the LMIs to be manipulated and combined to 21st Po wer Systems Computation Conference PSCC 2020 Porto, Portugal — June 29 – July 3, 2020 form semidefinite programs generating ne w in v ariant ellipsoids that address the two challenges simultaneously . Saturation is treated extensi vely using set in variance in [2] and [3]. Ref. [4] dev elops suf ficient conditions for guaranteed L ∞ performance in systems with saturation, while [5] provides L 2 -gain results for systems with actuator rate constraints. Meanwhile, optimal L ∞ controller design is addressed in [6]. Some of these results ha ve been applied to power system regulation problems. Guarantees on damping ratio and settling time were dev eloped in [7]. Disturbance rejection guarantees using in variant ellipsoids were presented in [8], while [9] and [10] used in variant ellipsoids to estimate stability regions. Howe v er , none of these papers deals explicitly with minimiz- ing the peak ov ershoot of the system. The current paper presents an LMI-based technique for optimizing an inv erter controller with saturation nonlinearities, with the goal of minimizing the maximum frequency de viation of the system follo wing a disturbance. The contributions are twofold. First, we combine results from [4] and [6] to present a unified approach to optimal L ∞ controller synthesis in systems with actuator saturation. Second, we demonstrate a first appli- cation of these controller synthesis results to po wer system frequency regulation. The performance guarantees presented in this paper only assume that the disturbance is bounded in L ∞ norm, and can otherwise be an arbitrary signal. The paper is organized as follows. Section II discusses the power system model under consideration. Section III presents the mathematical background underpinning section IV, control design. Section V presents the results of the controller design applied to the power system model discussed in section II. I I . M O D E L W e consider a simplified single-area system consisting of an aggregate generator and turbine governor , an in verter - connected energy resource, and a load. The frequency dynam- ics of the generator are gi ven by the linearized swing equation and the linearized turbine gov ernor equation: M ˙ ∆ ω + D ∆ ω = ∆ P M − ∆ P L + ∆ P I (1a) ˙ ∆ P M = − k ρ ∆ ω − k ∆ P M , (1b) where ∆ ω is the change in generator frequency follo wing a disturbance, M and D are the inertia and damping constants of the simplified generator model, ∆ P M is the change in po wer output from the prime mover , ∆ P M is the change in real power demand, ∆ P I is the real power injection from the inv erter , and ρ is the speed-droop coefficient of the turbine governor [11]. In verter dynamics are not modeled. W e take ∆ P L as the external disturbance into the system and assume it is has bounded infinity norm. Then without loss of generality , assume || ∆ P L || ∞ = 1 . The goal is to design a controller for ∆ P I to minimize the impact of this disturbance on the system, subject to in verter saturation constraints. The in verter power injection is modeled as ∆ P I ( t ) = sat ( q ) , where q is a control input and the saturation function is giv en by sat ( z ) = sgn ( z ) min( | z | , 1) . In general, the form of the optimal controller is not kno wn. W e propose a control law of the form q = − Kx , ∆ P I = sat ( q ) where K is a linear feedback gain matrix to be optimized and x is the state of the system, gi ven by ∆ ω ∆ P M T . In the proceeding sections, we consider both full-state feedback and output feedback in which only ∆ ω is measured. I I I . P E R F O R M A N C E M E T R I C S A. L ∞ -norms W e define the L ∞ -norm of a signal z ( t ) ∈ R n as k z ( t ) k ∞ = sup t k z ( t ) k 2 . (2) Now consider the open-loop system H : ˙ x = Ax + B w w y = Cx , (3) where w is an exogenous disturbance of bounded infinity norm. Throughout the paper , we assume that ( A , B w ) is con- trollable and ( A , C ) is observable. W ithout loss of generality , we can normalize w such that k w k ∞ ≤ 1 . The disturbance can represent changes in net demand or unexpected changes in generation. The reachable set of the open-loop system initialized at the origin is defined as R OL = Z t 0 e ( t − τ ) A B w w ( τ ) dτ : t ≥ 0 , k w k ∞ ≤ 1 (4) The L ∞ -norm of the system (3) is the largest possible measured output: sup x ∈R OL k Cx k 2 (5) In the frequency regulation problem with states x = ∆ ω ∆ P m T , the quantity of importance is ∆ ω , and this is also typically the observable quantity . The L ∞ norm of the system corresponds to the maximum frequency de viation possible giv en norm-bounded disturbances. B. L ∞ -norm overbound: the ∗ -norm Ideally , we would want to characterize the reachable set, but it turns out that computing it directly is difficult. In a system with m saturating elements, there are 3 m regions with different dynamics, each corresponding to a dif ferent combination of saturating element states. Instead of dealing explicitly with these saturation nonlinearities, we approximate the reachable set using inv ariant ellipsoids, from which the ∗ -norm, an upper bound on the L ∞ norm, can be computed. First, consider the open-loop system. Using L yapunov stability , R OL is contained within the inv ariant ellipsoid ε 1 = { x | x T Q − 1 x ≤ 1 } , for any Q 0 where an α > 0 can be found such that Q satisfies [6] A Q + QA T + α Q B w B w T − α I 0 . (6) T o understand where LMI (6) comes from, consider a quadratic L yapuno v function V ( x ( t )) = x ( t ) T Q − 1 x ( t ) and 21st Po wer Systems Computation Conference PSCC 2020 Porto, Portugal — June 29 – July 3, 2020 recall that L yapuno v stability inside the ellipsoid ε 1 for a sys- tem with norm-bounded disturbances requires that ˙ V ( x ) ≤ 0 outside ε 1 whenev er k w k ≤ 1 (argument t omitted for bre vity). These conditions condense down to the requirement that ˙ V ( x ) ≤ 0 whenev er [ w T w − x T Q − 1 x ] ≤ 0 . Applying the S- lemma, an equiv alent condition is ˙ V ( x ) ≤ α [ w T w − x T Q − 1 x ] for some α ≥ 0 . Next, use the chain rule to ev aluate ∂ / ∂ t V ( x ) , make the substitution ˙ x = Ax + B w w , and rewrite the inequal- ity as a quadratic form in x w T . Correspondence between nonnegati vity of a quadratic form and positi ve semidefiniteness of the associated matrix yields LMI (6). L yapunov stability dictates that the system initialized at the origin cannot lea ve ε 1 when k w k ∞ ≤ 1 . Therefore, ε 1 contains or is the reachable set. Similarly to the way in which we defined k H k L ∞ as the largest possible measured output within the reachable set, we can use ε 1 to define N α , the largest possible measured v alue within ε 1 . Since ε 1 contains the reachable set, it can be used to define an upper bound on k H k L ∞ . For a fixed value of α , N α is giv en by N α = sup x ∈ ε 1 k Cx k 2 (7) where ε 1 is defined by a positive semi-definite Q satisfying (6) [6]. For the frequency re gulation problem, the measured output Cx is ∆ ω . Since we are free to choose α within the constraints of (6), we can minimize our ov erestimate of the L ∞ -norm by , at worst, searching o ver α on an interval [6]. The minimum v alue resulting from this line search, the ∗ -norm, is giv en by k H k ∗ = min α ≥ 0 , Q 0 N α subject to (6) . (8) The corresponding ellipsoid { x | x T Q − 1 x ≤ 1 } provides the best (smallest) ellipsoidal ov er-approximation of the reach- able set. By substituting the dual of the square of (7) into (8), we obtain an equiv alent expression for the ∗ -norm k H k 2 ∗ = min α,λ, Q λ (9a) s.t. α, λ ≥ 0; Q 0; (9b) A Q + QA T + α Q B w B w T − α I 0 (9c) λ CQ QC T Q 0 . (9d) The LMIs in (9c) (or (6)) and (9d) are con ve x in ( Q , λ ) and therefore provide an efficient way of computing N α for a fixed α . The ∗ -norm is powerful because it provides a computationally ef ficient way of approximating a system’ s L ∞ norm. Ne xt, we utilize the tractability of the ∗ -norm to present a method for optimal L ∞ controller synthesis. I V . C O N T R O L D E S I G N W e present results based on [4] and [6] for synthesis of full-state and output feedback controllers optimized for L ∞ performance considering hard constraints on control output. The system equation in this case becomes: ˙ x = Ax + B w w + B u u y = Cx , (10) where B u is the control matrix. In our case, u is the acti ve power injection of the in verters, and B u = [1 0] T . For each feedback paradigm, we present the synthesis of a linear “low-gain” feedback controller and a nonlinear , satu- rating “high-gain” controller based on minimizing the ∗ -norm of the closed loop system. The low-gain controller relies on a guarantee that the saturating element will nev er be acti vated within the reachable set. The high-gain controller utilizes a crucial fact from [4] to guarantee that its performance will be at least as good as the performance of the optimal low-gain controller . A. Full-state feedback 1) Low-gain/linear contr oller: W e first consider a linear feedback control law of the form u = − Kx giv en by u = − v 2 B u T Q − 1 x (11) for some v > 0 and Q 0 . This control law is sufficient for closed-loop stability since it results in con v enient LMIs, but is not the only possible control law . Writing down (6) for the closed loop system by substituting A − B u K for A leads to a condition on ( Q , v , α ) for closed-loop L yapunov stability inside { x | x T Q − 1 x ≤ 1 } given by A Q + QA T − v B u B u T + α Q B w B w T − α 0 . (12) It immediately follo ws that the ∗ -norm-optimal controller for a linear system can be obtained by replacing (9c) with (12) and solving (9). A sufficient way to ensure that this approach will work in systems with saturation nonlinearities is to ensure that the saturation elements are ne ver activ ated. Specifically , this means enforcing k u k ≤ u max within { x | x T Q − 1 x ≤ 1 } when designing the linear feedback controller gains. In order to translate this into a constraint on Q and v, we start by rewriting x T Q − 1 x ≤ 1 = ⇒ k u k 2 ≤ u 2 max as u T u u max ≤ x T Q − 1 x . Substituting for u using (11) and rearranging using the Schur complement leads to the additional LMI in ( Q , v ) giv en by [4] 4 Q v B u v B u T u 2 max 0 . (13) Howe v er , due to (13), full control effort is only realized at the boundary of the inv ariant ellipsoid. T o see why , consider a point x (1) on the interior of { x | x T Q − 1 x ≤ 1 } where k Kx (1) k = u max . Then scaling x (1) by µ > 1 to extend it to the boundary of the ellipsoid would result in a control effort of k µ Kx (1) k > u max , which contradicts (13). It is reasonable to expect superior performance if the full control effort can be utilized on the interior as well as the boundary of the ellipsoid. A mechanism for achieving this is discussed in the next section. 21st Po wer Systems Computation Conference PSCC 2020 Porto, Portugal — June 29 – July 3, 2020 2) High-gain/nonlinear contr oller: In order to utilize more control capacity more of the time without sacrificing perfor- mance, we start with the controller from the previous section, scale it by δ > 1 , and saturate the result at ± u max , gi ving a controller of the form u ( t ) = − sat ( δ v 2 B u T Q − 1 x ( t )) , with Q 0 satisfying (12) and (13) [4]. The performance guarantee for this controller relies on a crucial fact: for any ( Q , v , α ) satisfying (12) and (13), the closed-loop system is L yapunov stable within the ellipsoid { x | x T Q − 1 x ≤ 1 } for both the lo w-gain and high-gain controllers. F or a proof, see [4]. This means that the ∗ -norm of the closed-loop system under the high-gain controller is no larger than that of its low-gain counterpart. In f act, we can e xpect better performance from the high-gain controller due to increased control expenditure. As δ → ∞ , the behavior of the high-gain controller approaches bang-bang or on/off control. T o summarize, the full-state feedback synthesis problem is to pick a Q and v such that Q , v = arg min α,λ,v , Q λ s.t. λ ≥ 0; α, v > 0 , Q 0; (9d) , (12) , (13) . These results, while useful, do not reflect the true nature of the single-area frequency regulation problem because of the assumption that all states are perfectly measured. In the next section, we present results for saturating control of output feedback systems. B. Observer-based output feedback W e proceed in parallel to the full-state feedback results. For output feedback, we consider the system ˙ x = Ax + B w w + B u u ˙ ˆ x = A ˆ x + B u u + Ł ( y − C 2 ˆ x ) y = Cx where x is the state, ˆ x is the measurement or estimate, and y is the measured output. The synthesis proceeds as follo ws: first, a full state feedback controller is designed. Then, using the full state feedback control gain, the observer gain Ł is designed using two LMIs that are analogous to (12) and (13) [4]. 1) Low-gain/linear contr oller: Define the error signal e ( t ) = x ( t ) − ˆ x ( t ) . Let Ł = S − 1 W for some S 0 , and P = Q − 1 as computed in the full state feedback controller design. Stacking the plant and error states, an inv ariant ellip- soid is giv en by x , e ∈ R n | x e P 0 0 S x e ≤ 1 where S and W satisfy P A + A T P − v PB u B u T P + α P v 2 PB u B u T P B w T P v 2 PB u B u T P PB w SA + A T S − WC 2 − C T 2 W T + a S SB w B w T S − α 0 . (14) This LMI is deriv ed from (6) the same way that (12) is, and guarantees that the observer is stable. The LMI guaranteeing that k u k stays below the saturation limit u max is giv en by [4] P 0 − v 2 PB u 0 S v 2 PB u − v 2 B u T P v 2 B u T P u 2 max 0 . (15) This LMI is analogous to (13) and is derived in the same way using the augmented states. 2) High-gain/nonlinear contr oller: Follo wing the intuition of the full-state feedback controller synthesis, the high- gain controller for output feedback is giv en by u ( t ) = − sat ( δ v 2 B u T Q − 1 ˆ x ( t )) , where Q 0 satisfies (12) and (13), and δ > 1 [4]. The action of the high-gain saturating controller must be accounted for in the condition for observer stability (14). Note that since the lo w-gain controller design guarantees k v 2 B u T Q − 1 x k ≤ u max , the action of the high-gain controller is equi valent to some scaling of the low-gain controller by a factor r which varies from 1 when both the low- and high- gain control magnitudes saturate at u max , to δ when neither does. Representing the high-gain controller as the low-gain controller scaled by r leads to P A + A T P − r v PB u B u T P + α P r v 2 PB u B u T P B w T P r v 2 PB u B u T P PB w SA + A T S − WC 2 − C T 2 W T + a S SB w B w T S − α 0 (16) which must hold for any r ∈ [1 , δ ] , b ut since the LMI is con ve x in r , this is guaranteed if it holds for r ∈ { 1 , δ } [4]. 3) Output feedback contr oller synthesis: W e now discuss sev eral nuances related to the synthesis of an output feedback controller as described abo ve. When selecting ( Q , v , α ) for controller design, we additionally enforce LMI (6) in order to ensure that the chosen combination of ( Q , v , α ) admits a feasible solution to the observer design problem. The suffi- ciency of this condition was verified experimentally . When selecting ( S , W ) from the feasible region of the observer design problem, we choose values that minimize the ∗ -norm of the measurement error . This results in the introduction of another dual variable θ ≥ 0 and an additional LMI analogous to (9d): θ C C T S 0 (17) Therefore, we can summarize the design of the high-gain observer -based output feedback controller in the follo wing 21st Po wer Systems Computation Conference PSCC 2020 Porto, Portugal — June 29 – July 3, 2020 way: Controller design: Q , v = arg min α,λ,v , Q λ s.t. α, λ, v ≥ 0; Q 0; (6) , (9d) , (12) , (13) Observer design: S , W = arg min θ, S , W θ s.t. θ ≥ 0 , S 0; (15) , (17) (16) , ∀ r ∈ { 1 , δ } The controller design problem is con vex in ( Q , v , λ ) and consists of a line search ov er α . Meanwhile, the observer design problem is con vex in ( S , W ) . Since these are linear matrix inequalities, they can be solved using standard conv ex optimization techniques. V . S I M U L AT I O N R E S U L T S A. Full state feedback W e simulated the full-state feedback system with the follo w- ing parameters: M = 2 , D = 0 . 6 , ρ = 0 . 05 , k = 5 , w max = 0 . 1 p.u. , and u max = 0 . 05 p.u. . The resulting ∗ -norm-optimal controller is giv en by K = 2 . 89 0 . 0808 . T o simulate the system, we applied a signal w ( t ) comprised of random step changes satisfying k w ( t ) k ∞ ≤ w max , shown in Fig. 2. The responses of the open-loop system and the closed-loop system with low-gain controller and high-gain controller with δ = 100 are shown in Fig. 3(a). The low- gain controller mitigates ov ershoot to an extent, but the high- gain controller performs significantly better for reasons that are evident in Fig. 3(b): the controller spends more time at maximum output. 0 5 10 15 20 25 -0.1 -0.08 -0.06 -0.04 -0.02 0 0.02 0.04 0.06 0.08 0.1 Fig. 2. Disturbance profile. W e used LQR and pole placement controller designs for baseline comparisons to the proposed controller . The feed- back matrices were K = 0 . 138 0 . 0045 for LQR, and K = 1 . 70 0 . 480 for pole placement. A gain of δ = 10 was 0 5 10 15 20 25 -1 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8 1 (a) 0 5 10 15 20 25 -0.05 -0.04 -0.03 -0.02 -0.01 0 0.01 0.02 0.03 0.04 0.05 (b) Fig. 3. (a) Time-domain response of the open loop system and the closed-loop full-state feedback system with low- and high-gain controllers. (b) Control inputs for the low- and high-gain controllers. used for the high-gain L ∞ controller . Fig. 4(a) compares the performance of the proposed controller to that of the baseline controllers subjected to saturation. The proposed controller performs better than conv entional methods and comes with additional guarantees about worst-case performance. W e simulated a series of disturbances rather than a single disturbance in order to “probe” the reachable set. Fig. 4(b) juxtaposes the ∗ -norm-optimal inv ariant ellipsoid and the states that might be occupied by the system when subjected to an L ∞ -norm-bound disturbance. It is important to note that the phase plane trajectories presented in Fig. 4(b) do not fill the reachable set. Rather , it is hoped that they cover a large portion of the reachable set in order to illustrate the accuracy of the in variant ellipsoid as an approximation of the reachable set. While Fig. 4(b) does not show that ε F S is a tight upper bound on the reachable set, it does show that the ∗ -norm of the system and the L ∞ -norm of the system’ s response to the disturbances w ( t ) in Fig. 2 are well within an order of magnitude. The two trajectories shown in Fig. 4(b) correspond to the low-gain controller and the high-gain controller with δ = 100 . Fig. 3(b) shows that at a gain of δ = 100 , the control behavior approaches bang-bang control, thus performance is not expected to increase significantly with higher gain. 21st Po wer Systems Computation Conference PSCC 2020 Porto, Portugal — June 29 – July 3, 2020 0 5 10 15 20 25 -1.5 -1 -0.5 0 0.5 1 1.5 (a) -1.5 -1 -0.5 0 0.5 1 1.5 -0.3 -0.2 -0.1 0 0.1 0.2 0.3 (b) Fig. 4. (a) Time-domain comparison of ∆ ω trajectories for full-state feedback LQR, pole placement, and high-gain (with δ = 10 ) L ∞ controller designs. (b) In variant ellipsoid for full-state feedback and two phase plane trajectories of the full-state feedback system corresponding to the low-g ain controller and the high-gain controller with δ = 100 . B. Output feedback The output feedback results in Fig. 5 show near-perfect tracking with ∗ -norm-optimal feedback gain K = 1 . 381 0 . 0491 and observer gain Ł = 10 3 × 1 . 11 − 0 . 100 T . The reason for the discrepancy in K between full-state and output feedback is the implementation of the additional LMI (6) in the controller design as an ad-hoc way of guaranteeing observer feasibility . The simulation results show identical performance between the two controllers, b ut a substantial penalty in the ∗ -norm guarantee for giving up ∆ P M measurements. V I . C O N C L U S I O N W e hav e presented a self-contained approach to L ∞ -optimal feedback controller design in systems with actuator saturation. Such systems are of ever -increasing prev alence in power systems as power electronics-connected devices populate the grid. Simulation results show that for a simplified single-area power system model, the proposed controller substantially outperforms con ventional controller designs such as LQR control and pole placement. Further , the results show that for the model used in this paper , the ∗ -norm pro vides a reasonable, if not tight, overbound of the system’ s L ∞ norm. Future work 0 5 10 15 20 25 -0.5 -0.4 -0.3 -0.2 -0.1 0 0.1 0.2 0.3 0.4 0.5 (a) -2 -1.5 -1 -0.5 0 0.5 1 1.5 2 -0.4 -0.3 -0.2 -0.1 0 0.1 0.2 0.3 0.4 (b) Fig. 5. (a) Time-domain comparison of ∆ ω trajectories for the full-state and output feedback high-gain controllers with δ = 10 . (b) Comparison of the in variant ellipsoids and phase plane trajectories of the full-state and output feedback systems for the same high-gain controller. includes implementation in a multi-node system with multiple controllable devices. R E F E R E N C E S [1] B. Kroposki, B. Johnson, Y . Zhang, V . Gevor gian, P . Denholm, B. M. Hodge, and B. Hannegan, “ Achieving a 100% Renewable Grid: Oper- ating Electric Power Systems with Extremely High Lev els of V ariable Renew able Energy , ” IEEE P ower and Energy Magazine , vol. 15, no. 2, pp. 61–73, 2017. [2] S. Boyd, L. El Ghaoui, E. Feron, and V . Balakrishnan, Linear Matrix Inequalities in System and Control Theory , vol. 15. Philadelphia: Society for Industrial and Applied Mathematics, 1994. [3] T . Hu and Z. Lin, Contr ol Systems with Actuator Saturation . Boston: Birkhauser , 2001. [4] T . Nguyen and F . Jabbari, “Disturbance Attenuation for Systems with Input Saturation: An LMI Approach, ” T ech. Rep. 4, Department of Mechanical and Aerospace Engineering, University of California, Irvine, 1999. [5] T . Nguyen and F . Jabbari, “Output feedback controllers for disturbance attenuation with actuator amplitude and rate saturation, ” in Proceedings of the 1999 American Contr ol Conference (Cat. No. 99CH36251) , pp. 1997–2001 vol.3, IEEE, 1999. [6] J. Abedor, K. Nagpal, and K. Poolla, “A linear matrix inequality approach to peak-to-peak gain minimization, ” International Journal of Robust and Nonlinear Contr ol , vol. 6, pp. 899–927, 1996. [7] H. M. Soliman and H. A. Y ousef, “Saturated robust power system stabi- lizers, ” International Journal of Electrical P ower and Energy Systems , vol. 73, pp. 608–614, 2015. 21st Po wer Systems Computation Conference PSCC 2020 Porto, Portugal — June 29 – July 3, 2020 [8] H. M. Soliman and A. Al-Hinai, “Robust automatic generation control with saturated input using the ellipsoid method, ” International T ransac- tions on Electrical Energy Systems , vol. 28, no. 2, 2018. [9] H. Xin, D. Gan, T . S. Chung, and J. Qiu, “A method for ev aluating the performance of PSS with saturated input, ” Electric P ower Systems Resear ch , vol. 77, pp. 1284–1291, aug 2007. [10] H. Xin, D. Gan, Z. Qu, and J. Qiu, “Impact of saturation nonlinear- ities/disturbances on the small-signal stability of power systems: An analytical approach, ” Electric P ower Systems Resear ch , vol. 78, pp. 849– 860, may 2008. [11] P . Kundur , N. Balu, and M. Lauby , P ower system stability and control . New Y ork: McGraw-Hill, 7 ed., 1994. 21st Po wer Systems Computation Conference PSCC 2020 Porto, Portugal — June 29 – July 3, 2020
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment