On the observability of relative positions in left-invariant multi-agent control systems and its application to formation control
We consider the localization problem between agents while they run a formation control algorithm. These algorithms typically demand from the agents the information about their relative positions with respect to their neighbors. We assume that this information is not available. Therefore, the agents need to solve the observability problem of reconstructing their relative positions based on other measurements between them. We first model the relative kinematics between the agents as a left-invariant control system so that we can exploit its appealing properties to solve the observability problem. Then, as a particular application, we will focus on agents running a distance-based control algorithm where their relative positions are not accessible but the distances between them are.
💡 Research Summary
This paper addresses a critical challenge in multi-agent robotic systems: localizing the relative positions between neighboring agents when direct measurements (e.g., from cameras or radars) are unavailable, typically due to cost or hardware constraints. Since many formation control algorithms require this relative position information, the agents must solve an observability problem—reconstructing their relative poses from alternative measurements like inter-agent distances.
The authors’ core methodological contribution is the formulation of the relative kinematics between agents as a left-invariant control system on a Lie group. For each agent i, the system state, encompassing the relative positions to all its neighbors and the agent’s own orientation, is represented as an element of a Lie subgroup G_i of SE(2n_i). This geometric modeling provides an intrinsic, coordinate-free description of the dynamics. The left-invariance property allows the dynamics to be translated to the linear Lie algebra space, facilitating global analysis and avoiding singularities associated with local coordinates.
Building on this model, the paper develops a nonlinear observability theory for such left-invariant systems. The observability is determined by analyzing the “observation space,” which is generated by the output functions (e.g., distance measurements) and all their successive Lie derivatives along the system’s left-invariant vector fields. A key theorem states that the system is locally observable if the differential of this observation space has full rank, equal to the dimension of the state space (the Lie group). This framework is general and can incorporate various combinations of sensor measurements.
As a concrete and highly relevant application, the paper focuses on distance-based formation control. Here, agents measure only the distances to their neighbors but need to estimate the relative positions to implement standard gradient controllers based on rigidity theory. The integration of a standard observer (like a Kalman filter) for position estimation with the distance-based controller is thoroughly analyzed. The authors identify significant robustness issues: achieving the desired formation shape does not guarantee correct estimation of the relative positions. Furthermore, undesired steady-state configurations, featuring incorrect shapes coupled with collective drifting motion of the entire formation, can emerge and be attractive. This creates a novel and important connection to known robustness problems in undirected distance-based formations.
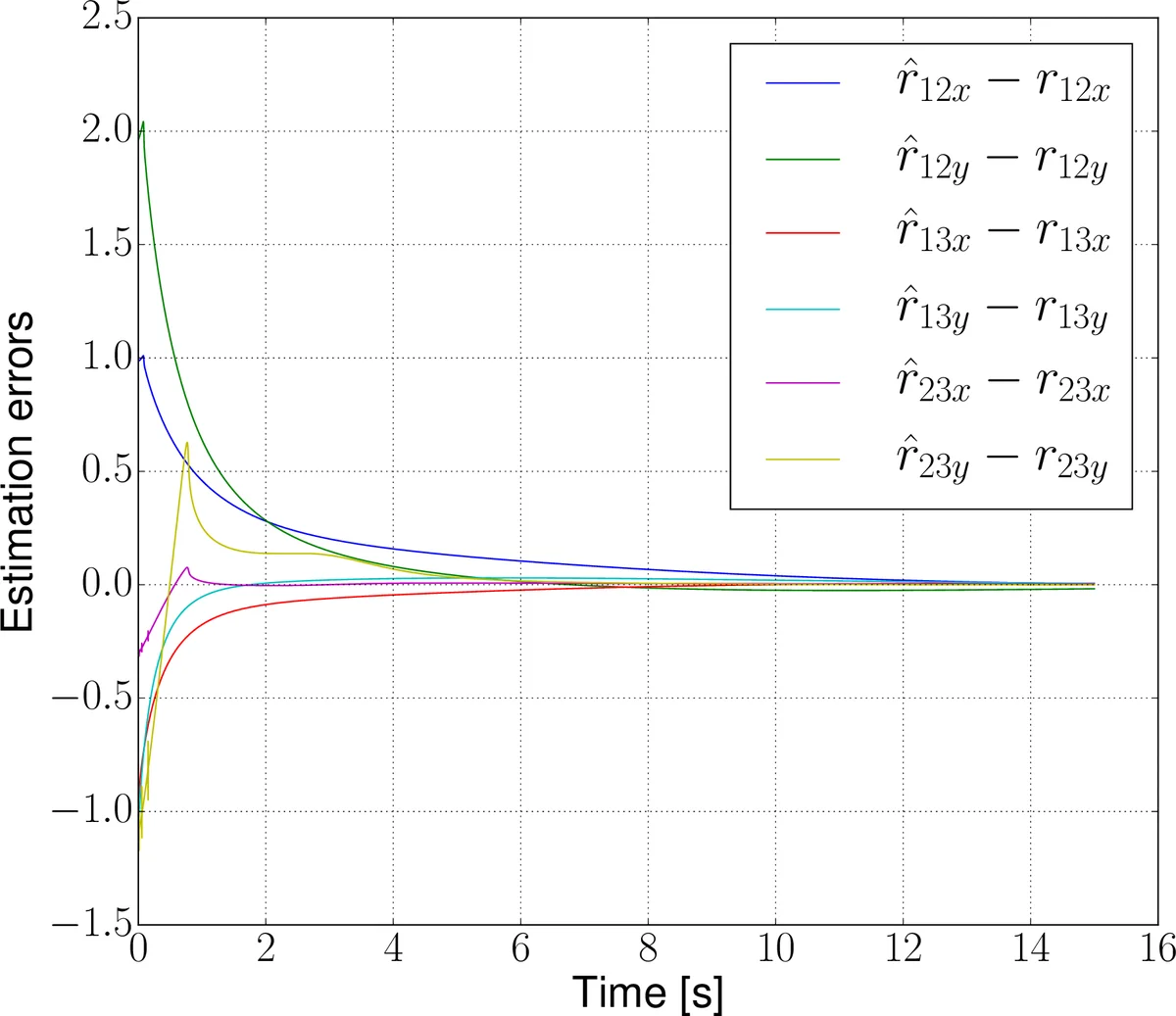
Finally, the paper proposes and demonstrates a practical implementation strategy that overcomes these issues. By carefully designing the observer based on the left-invariant observability analysis and integrating it with the control law, the system can achieve both accurate relative position estimation and stable convergence to the desired formation. Numerical simulations validate the theoretical findings and the effectiveness of the proposed solution, highlighting the practical utility of the geometric and observability framework for robust multi-agent navigation with limited sensing.
Comments & Academic Discussion
Loading comments...
Leave a Comment