LMI-based robust stability and stabilization analysis of fractional-order interval systems with time-varying delay
This paper investigates the robust stability and stabilization analysis of interval fractional-order systems with time-varying delay. The stability problem of such systems is solved first, and then using the proposed results a stabilization theorem i…
Authors: Pouya Badri, Mahdi Sojoodi
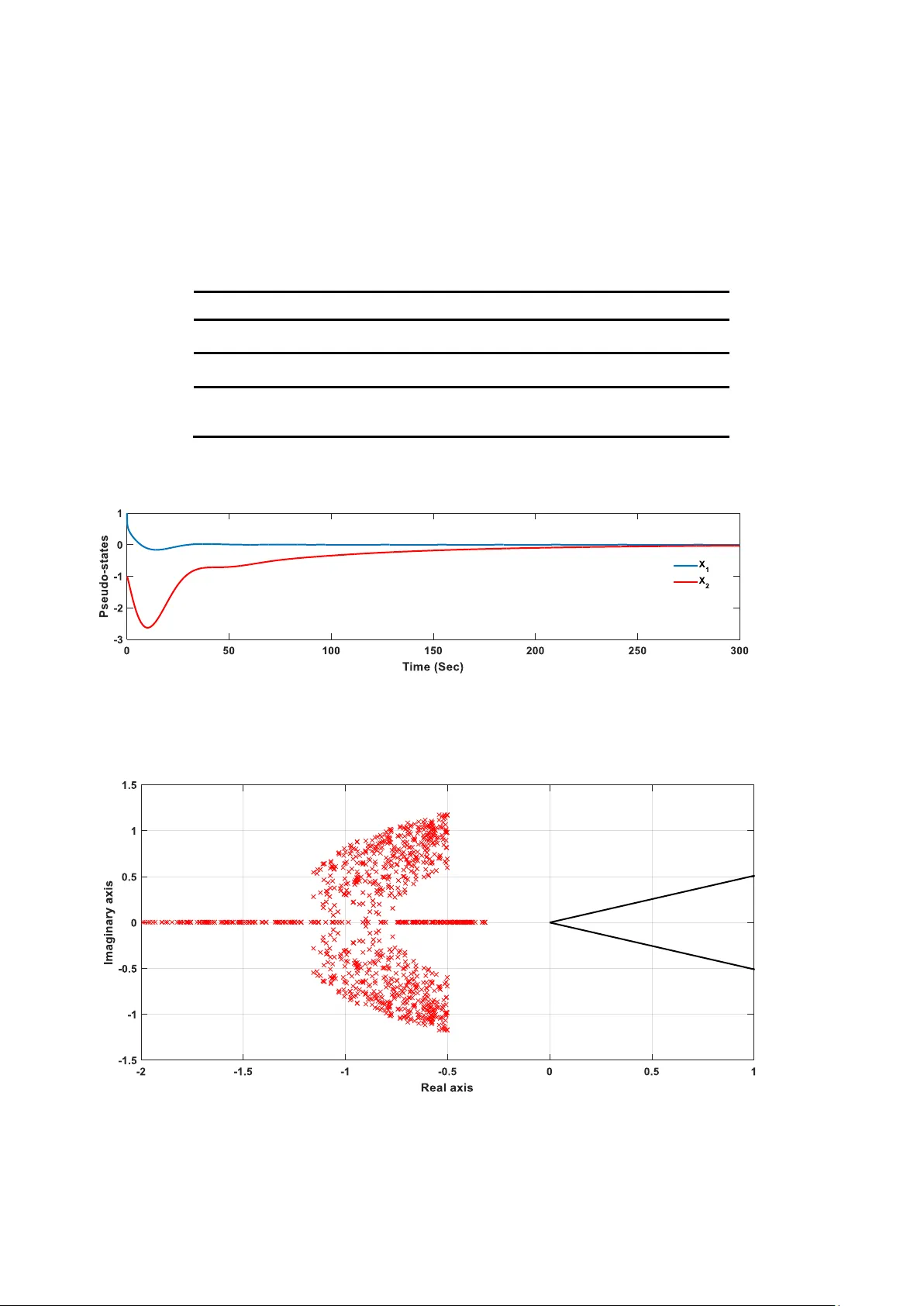
1 LMI-based ro b u st stability and stabili z a ti on ana lysis o f frac ti o n al- o rder inte rval sy stems w i th tim e-varyin g d ela y Po u ya Badri 1 , Ma hd i S o j oodi 1* 1 Advan ce d C o ntrol Syst e ms La b o ratory, School of Ele c trical an d C om p uter E ngineerin g , T arbi at Mo d ares Un iv e r s i ty, Te h ran, Ira n. * sojoodi@ mod ar es. a c. ir Abstr act: T h is paper i nv es tigat es t h e robu s t s tabili ty a nd stabili zation a nalys is of int e r v al f racti on a l -o r der s ystem s w ith ti me-var ying de l ay. T he s tabilit y pro blem o f such systems i s solv e d fir s t, an d t hen usin g t h e propo se d r es ult s a sta b ilizatio n theore m i s also i n clud e d , where su ff i c i ent c o ndition s a r e o b tai ned for designin g a s ta bi lizin g c o ntroll er with a pr edet e r mined o r der, wh ic h can b e c ho sen t o be a s l ow a s possible. Ut ili zi ng e ff i c ie n t l emma s , the s ta b ility a n d s tabili z ati o n th eore ms ar e pro p ose d i n t he f orm of LMIs, which i s more s u ita ble to c heck d ue t o variou s existin g efficie n t c onve x opti m i zatio n par se r s an d solve r s. Fi n all y , two nu me rical example s have sh own the e ffect iven ess of o ur res ult s . Key w ords : fra c ti onal -order sys te m, time -v ar ying dela y, interval unc ertain t y, r o b u s t s t abi li t y a n d s ta b ilizat ion, lin e ar m a trix in e qua lity (L MI). 1. I ntroduct ion In the la s t de c a des, utilizin g fractio n al -orde r c alculu s ha s open ne w hori zon s i n mo deling real -worl d syste ms , since i t c a n more co nci sely de sc ri be the be h avior of syste ms hav i ng a re s po n se wi th long memory tra n s i ents an d ot h er i ntrin s i c features which a re mo r e s uita b l e w it h f ra ctional -orde r equatio ns [1-4]. M o reov e r, it ha s be en prov en that f ra c tio n al -orde r co n tr o ller s h av e s i gnif i c a nt a dva n tages ov e r integer - ord e r ones [2 , 5 ]. Hen ce, a l ot of stu dies have been f o c u se d on th e fra c tional -ord e r control syste ms [3 , 6 - 9 ]. Real s yst ems i n variou s area s, s u ch a s e ngi n e ering, biology, a nd e c o no m i cs a re som e time s co nf r o n t ed w ith ti me delays, whi c h can lea d to instabilit y a nd oscillati o ns in su c h syste ms [1 , 6 , 7] . T h u s , i n t he p a s t few y e ar s, s ta b ilit y an d s ta bilizatio n p ro blem of ti me -delay system s ha s a ttracted part icular attentio n [ 10 ] , i ncludin g f ra ctional -ord e r system s [1 , 11 - 14 ]. In [ 15 ] t he r obust stabilizat ion p roble m o f interval f ra c tio n al - o rder sy s t ems wi t h on e ti me -delay u sin g f ractio n al -order co n troller s by t he M in k owski sum of value sets w a s i n vestigat ed. M o r eove r, i n [1 ] the robus t s ta b ilit y o f f ra ctiona l-order int e rval system s w ith multiple ti me delays w a s discusse d . In [ 13 ], t he r o b ust sta b ility of a f ra ct ion al - o rder tim e-delay sy s t em i s investi g ated in t he f r e q u ency domai n ba sed on f ini t e spe c tru m a ss ig nmen t . This a lg o rith m i s a n ext ension of t he tradi t i o n al pol e a ssignm e n t method, w hi c h c a n chan ge th e u nde s ira ble sy s t em charact e r i s tic eq u ati on into a d es ira b l e one. Furt he r mor e , i n [ 14 ], a rob u st fractio n al -ord e r PID control le r i s d esign e d for f ra c tio n al -orde r d e la y systems ba se d on positiv e stability re g io n (PSR) a nalys is . The finite -ti me s ta b ility of li ne a r d e lay f ra ctional -ord e r systems i s a lso inv es tigat ed in [ 16 ] based on th e ge ne rali ze d Gronw a ll ine quality an d th e Ca p ut o fra c tio n al derivat ive. Mo r eove r , modeling r e a l -world proc esses u s u all y l e a ds t o u ncertain models du e t o ne g le c t ed dyna m i cs, u ncerta in physical para met e r s, param e tri c var iations in ti me, and so on. T here f or e , robu s t s ta b ility a nd sta b ilizat ion beca me an i m porta n t proble m for all co nt r o l s yst ems inclu ding fra c ti onal -o rder ones [ 15 , 17 - 19 ]. In [ 18 ] th e probl ems of t he robu s t stab ilit y and stabi lization of f ra ctio n al - o r der lin e a r syste ms wit h po s itive real u nce rta in ty a re propo sed. As i t h a s b een de c la red t hat int e rval un c er tainty is more conv enient for t he co n tr o l s yst e m d es ign problem s [ 20 ] and r obust sta b ili t y ana lysis [ 21 ], s ta b ility and sta b ilizat ion p r oble ms of f ra c tio n al -order i n t e r val system ar e inve s ti ga t ed in [ 17 ] . A new s u ff i cient condition in term s of L M I f or the global a symptoti c stability o f a class of i nterval fractio n al -order nonlinear s ys te ms wit h t i m e -v ar y i n g del a y w a s p rop o sed in [ 12 ], wher e t he stat e matrix o f t he l inear part of t he s ys te m is s uppo sed to b e diag onal. 2 In the majorit y o f availa ble co n troll e r d es ig n m e t hods, high -ord e r co n trol le r s are obtain ed s u ffering f r om c os tly i mpl em entatio n , high f ra gi lity , un f a vora b le re liab ilit y, mai n tenance di ff i culties, a nd potential numerical errors. Desig n ing a contro ller with a low and fixed -order would be helpf ul bec au se t he de s ir e d closed -loo p perfor m a nce i s not ne cessarily a ssured by availa b le plant or control l er order r educ t ion procedure s [ 22 ]. T here fo r e , in our pre v ious work s , fixe d-o r d e r controll ers have been design e d for f ra c tio n al - o rder sy s t em s [3 , 4 , 19 ]. Motivate d by a fore me ntion ed o bserv a tion s , o ur pap e r a ims a t s olving th e problem of s tabili ty a nd s ta b ilizat ion of i n t e rval fractional -orde r sy s t ems with t ime-var ying d e la y i n t e r ms of linear matrix ineq uali tie s LMIs , w hich i s suitable t o be us ed i n p ra c tic e du e to vario u s efficie n t convex opt imizati o n par s er s a nd sol vers t h at ca n be a ppli e d to d e t ermine the fea s i bil ity o f t h e LMI cons traint s an d conse q uently c a lculat e d esign para meters. T h e mai n c o ntri b ution s of thi s pap e r ca n b e summari zed a s follo ws : - LMI c onditio n s ar e o b tai n ed f or s ta bility c he c k of f ra c tio n al -order int e r val sy s t em s with ti m e- varying del ay. - Robust stabi l i z i ng pro blem of su c h sy s t ems i s inv es tigat e d u s i ng pr oposed LM I stability condition s . - Fixed -o rder dyna m i c outp ut fe e dback co n tr o ller ord e r i s d es igne d wh ose ord e r can be determin ed before d es ign. As f a r as we know, t h e r e i s no r esult on t he r obust s ta b ilit y of un ce rtai n F O-LT I systems , wit h time - varying dela ys in t he l iterature . M oreover, anal yt ical de s i gn of a st a bi l izing dyna mic out p ut feedba c k cont r o lle r f or inter v al fra c tion al -or der s ystem s with ti me- var y ing delay i s investi g ated for t he fir s t tim e. I t is wo r th n o tin g t h at , L MI stabilit y c on d ition s for u n c er tain FO system s w ith t ime dela y, whi ch ar e m o re comforta b le to ch ec k, ar e obta i ne d for th e fir s t ti me in thi s p a per. T h e r es t of this pap e r i s o r g aniz ed as follo ws : I n section 2, so m e pr e li m i n ari es ab o ut i nterval uncertaint y a nd f ra c tio n al - ord e r calculus t ogether with the proble m formulat ion a re pre s ented. L MI -ba se d rob u s t stabilit y an d stabili z ing conditi o ns u s in g a dy n amic out put feedba c k c ont r o ller ar e d erive d i n Section 3 . So me nu m er ical e x ample s ar e give n i n Se c tio n 4 t o illu st rat e the effectiv eness o f th e pr o pos ed theo r etical r es ult s . F i n ally, the conclu s i on is dra w n i n s ec tion 5. Notations : In t h is paper , by we den o te t he tra nspose of m at rix , a nd den o te s . T h e notatio n ● is the sy mmetric comp o nent symbol in matr ix a nd i s t he symb o l o f ps e u d o i nver s e . Mo r eove r , T he not ati o ns d e n otes th e zer o matri x with appr o priat e di me nsio ns . 2. P r el i m i na ries a n d pr ob l em formu la ti o n In t h is sectio n , som e basic concept s a nd l emmas of fracti o n al -or der c al c ulus an d i n t e r val u ncerta in t y are pr es ente d . Con s id e r t he follo w i ng un ce rtai n FO - LTI s ystem for : (1) in whic h d en o te s t he p se u do -s tat e ve c tor, is th e control i nput, and is th e ou tp ut vector. Furt hermor e, and are interval u ncertain matri ces a s foll ows (2) (3) where and satis fy for all , and s ati sfy for all . T he ti me dela y i s a time-var ying cont i nu o us f u nction that sati sf ie s (4) and 3 (5) where an d a re consta n ts a nd t he initial co ndition re p r ese nt s a co n tinuou s v ec tor -valu ed ini ti al f unct ion of . In t h is arti c le , the followin g Ca puto de f i ni tio n for fracti o n al d e rivati ves of order of fu n ction is utilized [ 23 ]: where is Ga m m a f unct i on d efined b y ∞ a n d is t he smalle s t i n t e g e r t hat i s eq u al t o or gre a ter than . T h e follo w in g nota t i o ns are n eeded for dealin g w i th interval u ncertainti es . , (6) , (7) It is evi d ent t h at all eleme n t s of and are no n negati ve, th e r efore the fo llo w i ng matri ces ar e def i ne d. , (8) , (9) , ( 10 ) , ( 11 ) where , , an d a re c o lumn ve c tor s w ith t he k- th element bein g an d a ll t h e othe r s be i ng . I n addi tion, we hav e , ( 12 ) , ( 13 ) T h e follo w in g le mm a s ar e r equired, t o stu d y t h e s tab ili t y o f inte rv al fracti o nal-or d e r systems . Lem m a 1 [ 17 ]: L e t , , ( 14 ) then , and . Lem m a 2 [ 17 ]: For a ny matri ces and with a ppropriate di m e nsion s , we ha ve . ( 15 ) Lem m a 3 [6 ]: For giv en scalar s an d , t he f ollowin g ce rtai n i nteg e r -o rder sys te m . ( 16 ) w ith f ix e d m atric es a nd a n d a ti me-v a ryi n g s tat e d e la y satis fy in g (4 ) an d (5 ) i s a symptoti c a lly s ta b l e i f there exi s t , , and a ppropria tely d imensio n ed matric es and ( ) s u c h t h at th e follo w i ng hold s : 4 . ( 17 ) where , , , , ( 18 ) T h e pr o of o f t h is lem m a i s prese n te d in [6 ], usin g th e follow i ng Lya punov – Kra sovs kii f un c tio n al. . ( 19 ) Lem m a 4 [7 ] : Wi thout l oss of general it y, suppose t h at is t he e q uili b riu m p o int o f in t ege r a nd f ra c tio n al - o rder ti me-delay system s . ( 20 ) . ( 21 ) I f t he re e xist s a Lya p un o v – Kra so vskii f unctio n al in the for m ( 22 ) for the sy s t em ( 20 ) s u ch t hat i s ne g ative de fi nit e an d is a c onvex fu nct io n w ith r es pect to vector , then th e eq ui libriu m point o f t he sy s t em ( 21 ) is asy mptoticall y sta b le. Remar k 1 : F or giv en scalar s and , the f o llowing cer tain f rac tional -ord e r sy stem . ( 23 ) w ith f ix e d m atric es a nd a n d a ti me-v a ryi n g s ta te dela y satis fy in g (4 ) an d (5 ) i s a symptoti c a lly s ta b l e f or a ny i f t here exi s t , , a nd a ppropriat ely dimensio ned matri ces and ( ) s u ch that th e LMI constrai n t ( 17 ) hold s. Proo f. As L y apuno v – K rasov s k ii f u nctional ( 19 ) i s i n the f o r m o f ( 22 ) of L emma 4 , L M I co ns trai n t ( 17 ) of L emma 3 c an al s o s tabili ze th e fra c t ional -order system ( 23 ) . 3. M ain results In thi s sectio n first, a new r ob u s t s ta b ility conditio n i s d e r ived f o r i n t e r v al delay system (1) usin g which a n L MI a pp r o a c h i s pro posed for d es ig n ing a dyna mic out p ut fee d b a c k co n tr o l la w t o r obustly s ta b iliz e it. 3.1. Robust s tability In thi s s u bsection, a robu st stability s uffi c i e n t condit ion i s establi sh ed f or the asy m p toti c stabi l ity o f the sy s te m (1 ) with . Theor em 1 : F or giv en sc a la rs and , fra c tional -o rd e r i nterval sy s t em (1 ), with , , , to ge t he r with a nd a ti me-v a r y ing s tat e delay s a tisfyin g (4) a nd (5 ) i s a s y mptoticall y s ta b l e i f there exi s t , , and a ppropr iately d imensio ned matr ices and ( ) s u c h t h at th e follo w i ng holds: 5 , ( 24 ) in whic h ( 25 ) Proo f : According to Remark 1 sy s t em (1) is a s ympt o ticall y sta b le i f ( 26 ) in whic h , , , , , ( 27 ) T h e in eq ua li ty ( 26 ) ca n b e rewritt en as f o l l ows ( 28 ) applyin g Lem m a 2 to t h e t h ir d par t of t he right -h and s i de of inequa lity ( 28 ), th e f ollowin g i neq ualit y c a n be obtain ed for a s c a lar 6 . ( 29 ) Inequality ( 29 ) is non l ine ar b ecause of several multiplicati ons of variables . T he r efore, b y ap plying Sc h ur comple me nt o n t h e s e c ond part o f th e rig h t sid e of the la tter i nequality on e ha s , , , ( 30 ) which i s equival ent to LMI in ( 24 ), and it c o mplete s the pr oof. 3.2 . Robust s tabilization T h e mai n pur po s e o f th e a uthor s i n this subs ec tio n i s to desig n a robu s t dynamic output feedba ck cont r o lle r that a sy m ptotical ly s ta b ilize s t he i n terv al FO - LTI s ystem (1) i n t e r ms o f L MIs . H ence, the followin g dyna mic o utput f eed b ack co ntro l l e r i s p r esent e d , ( 31 ) w ith , in whic h is the ar bitrar y ord e r o f t h e contro ller an d a n d a re corresp o ndin g matri ces to be de s i gned. T h e re s u lted c lo s e d-lo o p au gmented FO -LTI system u s i ng (1 ) an d ( 31 ) is as fol l ows ( 32 ) w ith . ( 33 ) Next, a robu s t sta b iliza ti on th eore m i s e stab l ished. Theor em 2 : F o r given scalar s an d , clo sed - l oop sy s te m ( 32 ), with , , , an d output matr ix toget he r with a nd a ti me -v aryin g s tat e dela y satis fy ing (4) an d (5 ), if 7 there exi s t , , a nd a ppro p riatel y dime nsioned matr ices , ( ) and , ( ) and m a trix in th e form of , ( 34 ) s uch th at t h e fo llo w i ng LMI cons tra in become f e a sible , ( 35 ) in whic h , , , ( 36 ) then, th e dyna m ic output feedback controll e r param e ter s of ( 37 ) make the clos ed-loop s ys te m ( 32 ) a symptoti c all y sta b le. Proo f : The cl osed-loo p s ys te m ( 32 ) can b e c o nsider ed a s follo ws , ( 38 ) w ith . ( 39 ) Accordin g to R emark 1 t he clo se d- l oo p unc e rta in sy s te m ( 32 ) is as ymptotic ally s t able i f 8 , ( 40 ) in whic h we hav e , , , , , , ( 41 ) and , , , , a n d are ma trices wit h ap p ropriat e dimensio ns . B y a ssuming in the f o r m of ( 34 ), i.e. , and pr e- a n d po s t- m u ltiplyi ng in e quali ty ( 40 ) by one h as , , ( 42 ) Accordin g to t he symm e tr y o f t he matrix , the fo llo w i ng matri ces ca n be defined ( 43 ) T h e r ef o re, in e qua lity ( 42 ) c a n be r ew ritten a s 9 ( 44 ) applyin g Lem m a 2 to t he t hird part o f the r ight -hand sid e of the latt e r i neq u ality, th e following i n equalit y can be o b tai n ed for a sc alar , ( 45 ) 10 in whi ch we have . ( 46 ) Substitutin g ( 45 ) in ( 44 ), yields i nto . ( 47 ) Inequality ( 47 ) is no n lin e ar due t o various multiplicat ions of variables. H e n ce, by a pplying Schur comple me nt o n , and cha n ging v aria bles a s fol lo ws , ( 48 ) one can o btain lin e ar m a trix in equality ( 35 ) with para mete r s in ( 36 ) . Cor olla ry 1 : A lt hough Theor em 1 and T h e orem 2 are respecti v ely all ocated to robust s ta b ilit y an d s ta b ilizat ion of unc e rtain FO -LT I sy s t em s o f form (1 ), the pro p ose d method ca n b e ea s il y u s ed for t he case of c e r tain s y stems by so lvi n g t he LMI constraint s i n the se th eo r ems, r espectively. Proo f: The proof i s stra i ght fo rwar d by assu m in g in pro of proc edure of T heor e m 1 an d The o r em 2. 4. Num e rical e xa mples In thi s secti o n, s om e numerical e x ampl es ar e give n t o de monstrat e t h e a ppli c a bility o f th e pr oposed method. I n t his paper , we use Y A LMI P par se r [ 24 ] and S e Du Mi [ 25 ] solv er in Matlab tool [ 26 ] i n orde r to a ssess th e feasibility of th e propo s ed constra ints to o b tai n th e controller pa ram eter s . 4.1 . Exa m ple 1 In [1] ro b ust s ta b ility o f t h e f ra ction al -or der i n ter v al s ys te m 11 , ( 49 ) w ith f ra c tio n al - ord e r PI cont r o ller , propo s ed i n [ 15 ], i s checked. T he ai m o f thi s s ub sect io n is t o check robu s t s tability o f t he close d-loop delay ed s ystem u sin g pr oposed L MI const rai nts in Th eore m 1. Th e p se udo -st at e spac e repre se ntati o n of form (1 ) for th e gi ven s ys te m is a s f o l l ows . ( 50 ) Mo r eove r , t he pseudo -s tat e space re p re se ntat ion of t h e giv en cont r o lle r i s , ( 51 ) there f or e, clo s ed - l oop s ystem o f for m ( 32 ) can b e r epr es ente d by f o llo w i ng p aramet e r s: ( 52 ) Using Th e o r em 1 follo w in g p a ra meters can b e obtaine d, whic h i llu s t rat e t he robu s t sta b ilit y of the uncertain system ( 49 ), w hi c h has been c on c luded in [1], by cal c ulati ng a bou nd on th e pol es o f f ra c tio n al - order int e r val sy s te ms and exten d ing t he conc e pt o f t he value set an d zer o ex c lu s i on prin c ipl e t o t h ese syste ms . ( 53 ) 4.2 . Exa m ple 2 (robu s t s tabi lization) T h e dyna m i c out p ut fe e dba c k sta b ili zation pr o blem o f t he u ncertain fra c tio n al -o rd e r sy s t em o f Example 1 i n t he for m of ( 1) i s c onsidered w it h a nd pr es ente d in ( 50 ), a nd the time - var yin g delay is c o nsider ed a s follo ws ( 54 ) Accordi ng t o T heore m 2 , i t ca n be conc l ud e d that thi s un c ertai n fra c ti onal - o r der sy s t em i s asymptotical ly stabil iz a bl e util izing t he o b tai ned dyn a m i c outp ut fe edb a c k controll e r s i n t h e for m of ( 31 ) , w ith controller o rd e r s , ta b ulat ed in Ta ble 1. T h e t ime res ponse of t he un cert ai n c lo se d -loo p FO-LTI system o f form ( 32 ), c o nsi s ting of a random syste m in th e i nterval ( 50 ) a nd the obt a ined co n troll e r with ( s tatic controll e r) is i llustrat e d i n 12 Fig ur e 1 wh e r e al l the s tat es a symptoti c a lly co n verg e to zero. Th e eigen v a lues of , for s ome ran dom syste ms i n the ab ove i nterval, a nd s ta b ilit y b ou n darie s a re demonstra ted in F i g ur e 2 , w here a ll o f the eige n valu es of a re l ocat e d i n t h e sta b ility r egion. I t is obviou s from Fig ur e 1 a n d Figur e 2 that s ta b iliz i ng o f th e i nterv al FO -LT I s ystem w ith ti me - var ying d e lay is po ss ibl e even wit h propo se d s tatic cont r o lle r wi th . T abl e 1. The obtai ne d c ontr o ller para meter s for Exa mple 2 u s i ng T he ore m 2 . 0 1 2 Fig ur e 1. Pseudo -s tat e traj e ctory o f closed -loop FO - LTI syste m of for m (32) , via obtai ned c o nt r o ller wi th . Fig ur e 2. The lo c ati o n of eig en valu es of the u nce rta in closed - l oop system vi a o btain ed output feedback cont r o lle r in E x a mple 2 with . 13 5. Conc l usion Thi s pa per ha s sol ved t he proble m of stability an d stabi lization o f i nter val fracti o n al -or der syste ms w ith ti me-varyin g delay, where th e el ement s o f t he sy s t em s p se u do-state spac e mat rices a re un certain parameter s t h at ea ch ad o p t s a valu e i n a re al in terv al . T he ti me-varyin g d e l ay a l so o ffe r s mor e general ity compar e d wit h time -cons ta n t one which ha s b e e n a dopte d i n p r evious w ork s . U tili z ing variou s l emmas, the s tabilit y a nd s ta b ilizat ion t heo r e ms ar e pr oposed i n the for m of L MIs, which i s m o re suitabl e to chec k due to v ari o u s e x is ting effici e n t c onvex o pti m i zatio n par se r s a nd s olver s. E vent uall y, two nu merical ex a m p le s have shown t he effecti v ene ss o f pr o pos e d robu s t stabilit y a n d s ta bilizati o n theor ems . 6. Refer e nce s 1. Moh se nip o ur R, Fat hi J egark andi M. R obust sta b ilit y anal ysis of f ra ctional ‐ or d er interval syste ms with m ulti p le ti me delays. In terna tiona l Jou rna l of Ro bust an d Nonline ar Co ntrol 2 019 ; 29 (6): 18 2 3-183 9. DOI Electr o nic R eso u r ce Nu m ber 2. Ba d ri V , T avazoei MS . Simulta neou s com p ensati o n o f th e gai n , ph a s e , and p h a s e -slope. J ourn al of Dyna mic S ystems, Measu r e ment, and Contro l 2016 ; 138 (1 2): 12 1 002 . DOI Electro n ic Re so urc e Number 3. Ba d ri P, Sojoodi M . Robust fixed -order dy nami c output feedba c k c ontr o ller des ig n for fra c ti on al - order sy s te ms . IE T Con trol Theo ry & App lication s 20 1 8; 12 (9 ): 1236 - 1 243 . DOI Elec tr oni c Resourc e Nu m b er 4. Ba d ri P, Soj o odi M. Sta b ilit y an d s ta b iliza tion o f fr actional ‐ or de r sy s te ms wi th di ffe r en t deriv a tive orders: An LMI a pproa ch. Asian Jo urn al of Con trol 2 0 19 . D O I Electro n ic R eso ur ce Number 5. Ba d ri V , T avazoei M S . So me analyti c al re s u lts o n tu ning fractiona l - or der [ proportio n al – integral] cont r o lle rs for f ra ct i onal - or de r sy s t em s . I EEE T ran sactio ns on Con trol S yst ems Techn olog y 20 1 5; 24 (3): 10 5 9-106 6. DOI Electr o nic R eso u r ce Nu m ber 6. He Y, Wu M, S h e J - H, Liu G - P . Param e t er -dependent L yap u nov f u nctio n al for stabil ity of ti me - delay syste ms wit h pol y topic -typ e un certaintie s . I EEE Tran sac ti on s on Automatic co ntrol 2004 ; 49 (5): 82 8-832 . DOI Electronic Re so ur ce Numb e r 7. Ba d ri V , T ava zoei M S. Stabilit y a nalys is of fractio n al order tim e - dela y syst ems: constru c tin g n ew Lyap u nov f unct ions f rom th ose of int e ger orde r cou nterp ar ts. IE T Con t rol Theo ry & App li catio ns 20 19. DOI Elect r onic Re so urce N umb e r 8. Ghorba ni M, Ta v akoli -K akhki M , E s tara mi AA. R o b ust F OPID St a bili z at ion o f R etard ed Ty p e Fractional Or d e r Pla n ts w ith I nterval U ncertaintie s an d Int erv al T im e Dela y . Jou rna l of th e F r ank l in Institute 2 01 9. DOI E l ec tronic R es o ur ce Nu m ber 9. Ba d ri V, T ava zoei M S . N on – Unifor m R educin g t h e Inv o lved Di fferentiat o r s ’ Or der s an d Lyap u nov Sta b ilit y Preservati on Probl em in D yn a m ic S ys te ms . IEE E Tran sactio ns o n Circ uits an d Sys tems II: Expre ss Briefs 20 19. DOI Ele c tronic R eso ur ce Nu m ber 10. X u S, La m J. A sur vey of l in e ar matr ix inequalit y techni q ues in sta b ility anal ys i s of delay syste ms . Inte rnatio nal J o urn al of Sy stems Scie nc e 2008 ; 39 (12 ): 1095-111 3. DOI Ele c tro n i c Resourc e Nu m b er 11. Moornani KA, Haeri M. N ecessar y a nd su ff i c i ent conditio ns for BI BO -stabi lity of s ome fracti o n al delay system s of n e utral typ e . IE EE Tran sactio ns on Autom atic contro l 20 10 ; 56 (1): 12 5-128 . DOI Ele c troni c R es o ur ce Nu m ber 12. Li P, C h e n L, Wu R, Ma c ha d o J T , Lop es AM, Yu a n L. Robu s t a symptotic st a bilit y of i n ter v al f ra c tio n al - o rder no n linear s ystem s with ti me - d elay. Jo urn al of the F r ank li n Institute 20 18; 355 (15): 774 9-776 3. DOI El ectro n ic Re so urc e Nu m b er 14 13. Liu L , Z ha n g S, X u e D, Ch en Y. Ro b ust s tability a nalysis fo r frac ti onal ‐ or d er sys t ems with tim e delay bas e d on fin it e spectrum assig nmen t . Inter nation al Jo urn al of Robu st an d Nonline ar Con trol 20 19; 29 ( 8): 22 83 - 2 295. DOI E l ec tro nic R esource Nu mber 14. Zh an g S , Liu L, Cui X. R ob u s t FOPID controlle r de s i g n for f racti on al ‐ o r der dela y syste ms u sing positiv e stabi li t y regi on a n al y sis. In terna t ion al Jo urnal o f Robust and Nonline ar Co ntr ol 20 1 9; 29 (15 ): 5195 - 5 21 2. DOI E lectro n ic Re so ur ce Numb e r 15. Gao Z. R o bu s t stabili z ati o n of i nterv al f ra c tional -or der pl an ts w i t h on e tim e- de lay by fra c tion a l - order contr o ller s . Jo urn al of the F ran klin In sti tute 20 17; 354 (2): 767- 7 86. D OI Ele c tro n i c Resourc e Nu m b er 16. Naif ar O , N a g y A, Mak h louf A B, K harra t M , Ha mm a m i M A. F init e ‐ t i me st a bil ity o f li near f ra c tio n al ‐ orde r ti me ‐ de lay system s. Inte rnatio nal J our nal of Rob ust and Non linear Con t rol 20 19; 29 (1): 180 - 1 87. DOI El ec tronic R es our ce Nu m ber 17. Lu J -G, Chen G . R obust stability an d stabi l i z a tion o f f ra ct io nal -o r der in terval syste ms : an LM I approach. I EEE Trans action s on Au tomatic con trol 2 009; 54 (6 ): 12 9 4-129 9. DOI Elec tro n ic Resourc e Nu m b er 18. Ma Y, Lu J, Ch en W. R obust s tabilit y an d s tabili z ati on of f ra c tio n al or der li ne ar syste ms with positiv e r e al u ncertai n ty. IS A tran saction s 20 14; 53 (2): 199- 20 9. DOI Ele c tronic R es o ur ce Number 19. Badri P, Sojoo di M. Robust s ta b ilisatio n of f ra c tio n al -orde r interval s ys te ms via dyna m ic output feedba c k: an LMI ap proach. Intern ation al J ourn al of S ystems Scienc e 201 9 : 1 - 1 3. DOI El ec tronic Resourc e Nu m b er 20. A la g oz BB. A note on ro b u st stabi li ty a naly s i s o f f ra c tio n al order i n terval system s by mini m u m argume n t vert e x a nd e dg e polyn om ial s . IEE E/CAA Jou rnal of Automa ti ca Sin ica 20 16; 3 (4): 4 11 - 42 1. DOI Electronic R eso ur ce Numb e r 21. Henrion D , Sebek M , K ucera V. L M I s for r obust sta b ilizatio n o f sy stems with elli psoid al uncertaint y P roc ess Con t rol Con feren ce , 20 01. 22. Badri P, Am ini A, S ojoodi M. Robu s t fixed -o rder d ynami c output feedback co ntroll e r d es ign for nonlinear unce r tain su s p ension s ystem . M ech an i ca l Systems a nd Si gna l P roc essing 20 1 6; 80 : 137- 15 1. DOI Electronic R eso ur ce Numb e r 23. Podlubny I. F raction al d iff ere ntial eq uations: an in t roduc ti on t o frac tional d erivative s, frac t ional differe ntial equ ations , to metho ds of their so lution a nd so m e of their ap plicatio ns . Else v ier, 199 8. 24. Löfberg J . Y A L MIP: A t o olbo x for m odeling a nd opti miz a tio n i n M A T LA B Pro ceed ings of th e CACSD Con feren ce . Ta i pe i , Ta i w a n, 20 04. 25. Sturm JF. Using SeDu Mi 1.02 , a MA T L A B toolb o x for optimizat ion over symmetric cones. Optimiza ti on met hod s and softw are 19 99; 11 (1 - 4 ): 625 - 653 . DOI E le c tronic Resour ce Numb e r 26. Higham DJ, H igha m NJ. MATLA B gu i de . Siam, 20 16.
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment