Surfing on an uncertain edge: Precision cutting of soft tissue using torque-based medium classification
Precision cutting of soft-tissue remains a challenging problem in robotics, due to the complex and unpredictable mechanical behaviour of tissue under manipulation. Here, we consider the challenge of cutting along the boundary between two soft mediums…
Authors: Art=uras Straiv{z}ys, Michael Burke, Subramanian Ramamoorthy
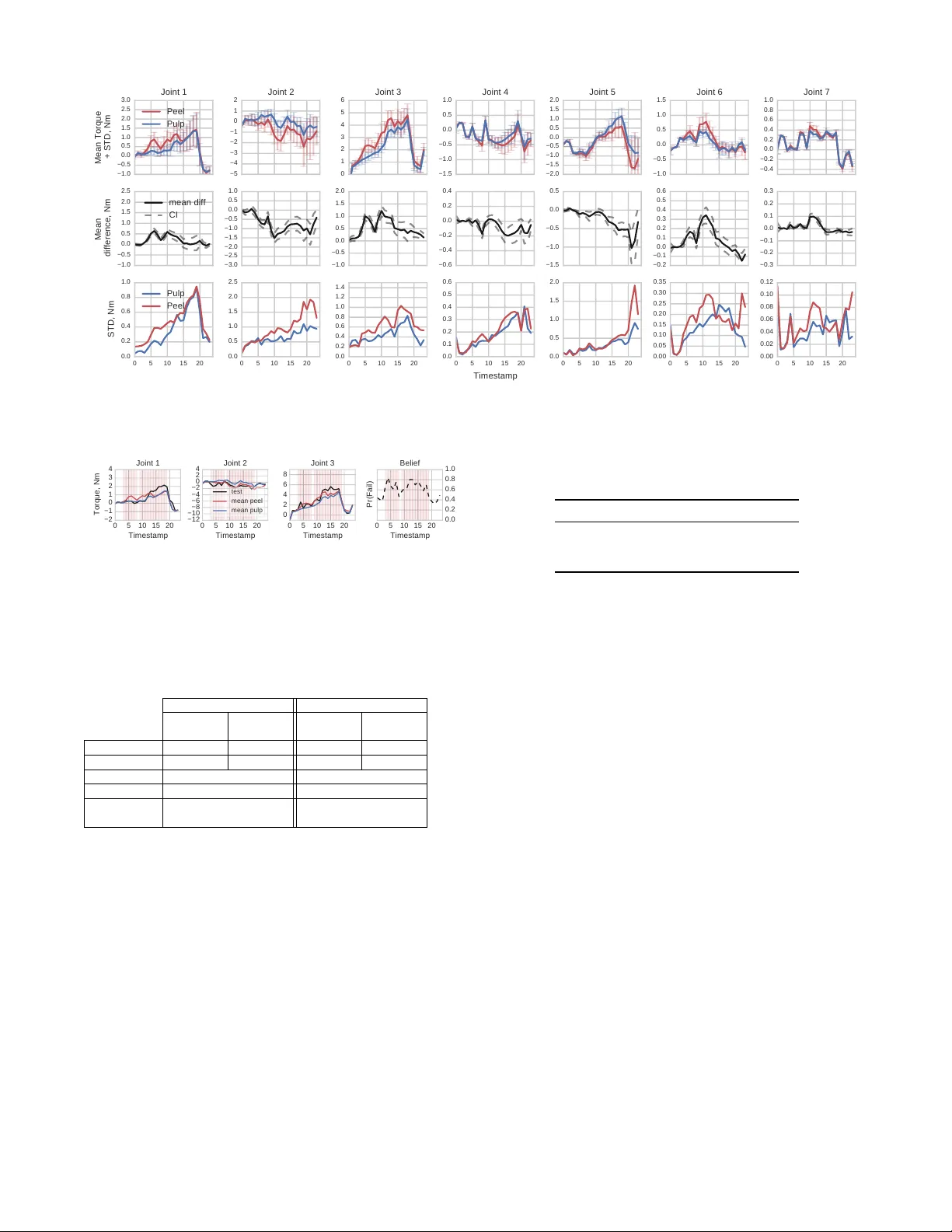
Surfing on an uncertain edge: Pr ecision cutting of soft tissue using tor que-based medium classification Art ¯ uras Strai ˇ zys, Michael Burke and Subramanian Ramamoorthy Abstract — Precision cutting of soft-tissue remains a challeng- ing problem in robotics, due to the complex and unpredictable mechanical beha viour of tissue under manipulation. Here, we consider the challenge of cutting along the boundary between two soft mediums, a problem that is made extremely difficult due to visibility constraints, which means that the precise loca- tion of the cutting trajectory is typically unknown. This paper introduces a novel strategy to address this task, using a binary medium classifier trained using joint torque measur ements, and a closed loop control law that r elies on an error signal compactly encoded in the decision boundary of the classifier . W e illustrate this on a grapefruit cutting task, successfully modulating a nominal trajectory fit using dynamic movement primitives to follow the boundary between grapefruit pulp and peel using tor que based medium classification. Results show that this control strategy is successful in 72 % of attempts in contrast to contr ol using a nominal trajectory , which only succeeds in 50 % of attempts. I . I N T RO D U C T I O N The design of effecti ve learning and adaptiv e control strategies for precision cutting remains an open problem in robotics [1], [2], [3]. This is particularly true for the case where cutting in volv es mo ving between tw o mediums, and where there is uncertainty in the location of these. Cutting tasks of this form are regularly encountered in surgery , where tumour extraction is guided by well estab- lished continuum dif ferences between tumours and normal tissue [4], [5]. This paper is motiv ated by wide local excision, a sur gical procedure that aims to remove a tumour with a clear margin of healthy tissue around it. At present, manip- ulation tasks like these are inconceiv able for autonomous robots, for a variety of reasons. First, the constrained op- erational space of non-tri vial geometry restricts an end- effector’ s maneuverability and is sev erely limited by visi- bility constraints. These visibility constraints are a particular challenge, and human surgeons often rely strongly on haptic feedback for cutting, using tactile tissue differences to guide procedures instead of vision. In addition, this task is highly variable and uncertain, due to the unpredictable behaviour of deformable tissue and v aried tumour shapes. Finally , and most importantly , this contact-rich task is characterised by safety constraints imposed on the region of operation and allow able applied forces. It is therefore critical to keep an end-effector inside a desired region while executing the task. In this study , we move towards addressing the challenge of autonomous cutting with visibility constraints by 1) employing probabilistic inference to identify the boundary between two mediums using torque sensing, and 2) using Authors are with School of Informatics, University of Edinbur gh Fig. 1. Scooping grapefruit with a regular paring knife. the medium classification probability as an error signal for online, closed-loop movement adaptation. As a testbed, we consider fruit processing, and study the task of scooping a grapefruit segment out of the membrane with a kitchen knife (see Fig. 1). This manipulation task shares sev eral important characteristics with the surgery problem described abov e, including the comple x geometry of the task space, the need for contact-rich manipulation in a deformable en vironment and the presence of two mediums with differing material properties. Precision food processing is itself an industrially useful skill, and the ability to extract fruit portions without damaging food products is particularly valuable. A ke y feature of the grapefruit testbed is an implicit task requirement to keep the knife inside the intermediate region between the peel and pulp boundary , such that most of the pulpy segment is extracted without the knife getting stuck in the peel, or too much grapefruit being left on the membrane. Since the exact shape and location of this boundary curve is unknown, it must be inferred during task ex ecution. The ke y insight for the approach proposed in this work comes from observing grapefruit scooping when executed by human. It is clear that humans do not rely on an accurate geometrical model of the fruit, but instead apply a general scooping mov ement that is continued until it stops feeling right (i.e. when the knife starts progressiv ely entering the peel). In these cases, the movement is either adjusted, or completely restarted using a dif ferent insertion angle. Our hypothesis is thus that cutting occurs using a rough nominal trajectory that is modulated by torque feedback resulting from the differing tissue characteristics of the tw o mediums being separated. This work introduces a novel framework to accomplish tasks of this form. Here, we use Dynamic Mov ement Primi- tiv es (DMP) to learn a general scooping motion (the nominal trajectory) using kinesthetic demonstration. Howe ver , due to the variations in grapefruit’ s shape and its mechanical properties, we sho w that generalisation of the learned mov e- ment primitive is inadequate. W e therefore propose a control scheme in which the corrections to the DMP trajectory reflect the probability of knife being inserted into either of the two mediums. In this formulation, the point of highest uncertainty in this belief (probability of 0.5) serves as a proxy for the desired region of operation (i.e. the boundary between the pulp and peel). This probability is estimated at each time step of task ex ecution by classifying torque readings from the joints of robot arm. W e use a logistic regression classifier trained to disambiguate the mediums on a dataset of multiple task executions to demonstrate the feasibility of this method. I I . R E L A T E D W O R K There is a substantial amount of research on the use of the force feedback in robotic manipulation tasks. Howe ver , most work is focused on rigid object manipulation (e.g. there is extensi ve research on the use of force data in the areas of robot door opening [6], [7], [8], grasping [7], [9], [10] and object identification [11], [12]), where task dynamics are relativ ely well understood and many mature techniques for motion planning and control are readily av ailable. Unfor- tunately , many of these techniques are not applicable to the manipulation of deformable objects. A particularly representati ve deformable object manipula- tion task inv olves food cutting, for example fruits or cheese. This process has time-varying nonlinear dynamics that are extremely difficult to describe analytically [13] (although attempts hav e been made [3], [14], [15]). As a result, learning-based techniques hav e been proposed to address this challenge. Lenz et. al [16] use deep learning techniques to model food cutting tasks and further use these in a model- predictiv e control scheme. Here, robot controls are optimised in real time with respect to the constructed cost function, which penalises the height of the knife and its deviation from a sa wing range, thus forcing a cutting mov ement. This approach was verified on a variety of food objects, such as lemons and potatoes, and showed its ability to adapt to both intra-class and time-varying variations in the physical properties of the objects. A similar approach to learning the predictiv e model is described by Tian et. al [17], where the authors demonstrated tactile servoing using high dimensional tactile sensor data. Another use of learning in the latent space is presented in the work of Gemici and Saxena [18], which is concerned with robotic handling of food objects, e.g. grasping or piercing. Here, latent features of objects were learned from force data collected during the manipulation and then used to classify the objects for manipulation planning. Many manipulation tasks, e.g. scooping, inv olve nontrivial kinematic trajectories that can be learned from demonstra- tion. In [19], the authors propose a general frame work (Dy- namic Mov ement Primitiv es, or DMPs) for encoding com- plex movements as a parameterised policy . This frame work, when coupled with feedback enables reacti ve mo vement adaptations [20], [9]. In our work, we use a predictiv e model of the expected sensor trace, that is based on the statistics of multiple task e xecutions. This approach is similar to [21], where the statistics of sensor measurements from the successful task executions were used to construct a predictiv e model for online failure detection. W e apply a similar method to model the region of operation (pulp or μ 1 μ 2 y t y t- 1 y 0 y t- 2 Fig. 2. Medium separation by following nominal trajectory . µ 1 and µ 2 are stiffness parameters of mediums, y 0 is initial pose and y t is trajectory of the knife. The dashed line represents the nominal path for tip of the knife. peel in our grapefruit example) using torque sensor readings. Howe ver , a key contribution of this work is the use of this classification scheme to perform boundary identification for cutting with visibility constraints, through the introduction of a control scheme for movement adaptation based on the estimated probability of being in a given medium. I I I . P RO B L E M F O R M U L A T I O N As discussed pre viously , this paper focuses on the task of precision-cutting between two mediums. Our primary interest lies in the development of an adaptiv e control framework, so we do not consider the use of any task specific cutting equipment or machinery , and focus on cutting using a standard kitchen knife. In addition, we allow control of the initial insertion position, and thus, we manually initialise the starting position of the knife. The task described above can be formulated in a 2D task space. Consider two elastic mediums with different stiffness ( µ 1 and µ 2 ), separated by a curved boundary (see Fig. 2). Assume a strong prior over the stiffness and boundary curve (dashed line) is av ailable, but no e xact parameters are kno wn. The objectiv e is to steer the tip of the knife along the true boundary such that separation of mediums is maximised, while av oiding excessi ve deformations imposed to either of mediums by the knife. Since the exact curve of the boundary is unknown, the open loop e xecution of the prescribed path (based on a prior belief ov er the curve of the boundary) runs the risk of inserting the knife into the peel (in our grapefruit example), thereby severely restricting the knife’ s maneuverability . I V . C U T T I N G U S I N G U N C E RT A I N T Y F E E D B AC K W e address the challenge abov e using a learning strate gy where the desired operational region is compactly encoded in the decision boundary of a binary medium classifier . Here, the estimated likelihood of sensor readings associated with either medium guides the mov ement execution in the form of online trajectory correction. In summary , we 1) use the DMP framew ork to encode a nominal scooping trajectory , 2) learn probabilistic classification of sensor readings associated with operation in either mediums, and 3) construct a control scheme that corrects the DMP according to the estimated Nominal DMP K t Execution Classifier y t t y + ∆ t Pr(peel) ∆ t τ t FK IK θ t θ ’ t Fig. 3. Overvie w of the proposed control scheme. posterior distribution over either medium, as illustrated in Fig. 3. Here, θ t denotes the nominal joint trajectory , θ 0 t the corrected joint trajectory , and y t represents the nominal Cartesian trajectory . ∆ t denotes the correction term applied to the Cartesian trajectory , K t is a gain matrix, τ t refers to the sensed torque readings at time step t , and P r ( peel ) is the probability of the knife being inserted into one of the mediums. FK and IK are Forward and Inv erse Kinematics transformations for the robot arm. Note that gain matrix K t is time dependent, as the correction direction depends on the position along the nominal trajectory at time t . W e briefly discuss each element in the control framework belo w . A. Nominal trajectory modelling using DMPs In the DMP formulation [19], any goal-oriented mov ement primitiv e can be expressed as: τ ¨ y = α z ( β z ( g − y ) − ˙ y ) + f (1) where ¨ y , ˙ y and y are the desired acceleration, velocity and position, respectiv ely , g is the goal position, τ is a temporal scaling factor , α z and β z are time constants, and f is a nonlinear forcing function. In the abov e equation, the nonlinear term f modulates the landscape of a global point attractor g . Thus, an arbitrarily complex mov ement can be represented by appropriately constructing f . T ypically , the nonlinear function f is represented using a normalized linear combination of basis functions: f ( x ) = P N i =1 Ψ i ( x ) w i P N i =1 Ψ i ( x ) x ( g − y 0 ) (2) where N is the number of basis functions Ψ i ( x ) = e − h i ( x − c i ) 2 with center c i , widths h i and weights w i . Note that the forcing term does not depend on time, but does depend on phase v ariable x that monotonically decays from 1 to 0 with a user specified rate α x : τ ˙ x = − α x x. (3) In the proposed framew ork, a nominal scooping trajectory is captured by kinesthetically guiding the robot arm and recording the end-ef fector’ s Cartesian path (the time series of the end-effector’ s position and orientation waypoints). The corresponding velocity and acceleration profiles of the mov ement, ˙ y and ¨ y , are obtained by twice differentiating the recorded end-effector’ s path y . The desired nonlinear function f (expressed by rearranging (1)) is approximated by employing the Locally W eighted Regression method [22], used for optimising the weights of the basis functions. It should be noted that the nominal trajectory could be mod- elled using any behaviour cloning strategy , and the proposed approach is not limited to the use of DMPs. In our approach, at each time step t we add a local correction ∆ t to the current point on the Cartesian path y t of nominal DMP (see Fig. 3). The correction term ∆ t is gi ven by ∆ t = K t h P r ( m, t ) − 0 . 5 i (4) where K t is time-varying positi ve definite gain matrix that defines the sensitivity of task variables and P r ( m, t ) ∈ [0 , 1] is the probability of the knife being in the medium m at time step t . Note, that the desired region of operation at each time step t lies at the boundary between two mediums, where probability P r ( m ) is equal to 0.5. Thus, our proposed uncertainty dri ven control law can be formulated generally as y 0 t = y t + K t h P r ( m, t ) − 0 . 5 i (5) where y 0 t is the corrected version of the nominal trajectory y t . B. Logistic r e gr ession In this work, we use logistic regression to model the probability of being in a giv en medium. In this approach, model parameters w are fit by maximizing the probability of the data under a linear logistic model: L ( w ) = N Y i =1 p ( y i | x i , w ) (6) where L is the likelihood, N is the number of training samples of torque readings, y i is the label (e.g. “Peel” or “Pulp”) of the i th example of torque data, x i is a vector of torque readings of the i th example and w is a model parameter . If the cost function J ( w ) is defined as the negati ve log- likelihood of labels y , then the above e xpression is equi valent to minimizing: J ( w ) = N X i =1 h − y i log ( σ ( w T x i )) − (1 − y i ) log (1 − σ ( w T x i ) i (7) where σ ( · ) is a sigmoid function and labels y ∈ { 0 , 1 } . In order to discourage the optimizer from overfitting to the training data, the cost function can include an additional reg- ularization term that penalizes extreme weight coefficients, e.g. λ 2 || w || 2 , where λ denotes the regularization strength. Fig. 4. Images of the PR2 robot scooping a grapefruit. C. Experimental setup All e xperiments were conducted using a 7 degree-of- freedom PR2 robot arm. The PR2 arm is counterbalanced and highly compliant, and is well-suited for kinesthetic demon- strations of flexible and fluid movements. The remaining elements of the experimental setup consisted of a chopping board clamped to the table, a halved grapefruit fixed to the chopping board, and a regular paring knife secured at the gripper (see Fig. 4). For registering the torques experienced at the joints of the arm we used standard PR2 joint effort readings (a joint torque estimate based on the joint motor current). D. Evaluation of nominal DMP The learned scooping DMP was ev aluated on the 10 randomly chosen segments. Before each trial, a segment was pre-cut along the segment radii and the pose of the knife was manually adjusted, as discussed in the pre vious section. Successful task execution implies the complete extraction of the undamaged segment without the knife getting stuck in the peel. The results of the trials agreed with original expectations, with only 2 successful task executions out of total 10. In 7 of the failed trials, the knife entered the peel and the execution was aborted. Moreov er, an instance of tearing apart the segment during the scooping was registered. As anticipated, the main dif ficulty of the task w as av oiding the knife’ s insertion into the peel, where further knife maneuverability became limited. V . L E A R N I N G T H E B O U N DA RY R E G I O N U S I N G S E N S E D T O R Q U E A. Dataset The learned DMP was used to accumulate joint torque readings associated with successful (cut through the flesh) and failed task executions (cut into the peel). These traces of torque measurements were analysed and further used for training the logistic regression model to estimate the probability of the knife’ s deviation from the desired region of operation, i.e. the boundary between pulp and peel, where task ex ecutions succeed. W e used the learned DMP and experimental setup described in the pre vious section. The criteria for a successful trial remained unchanged from the preliminary e valuation of the DMP . A total of 111 scooping trials were conducted using a number of grapefruit, of which 55 trials were successful and 56 trials failed. The nominal trajectory comprised 24 segments, at which a single snapshot of torque readings was taken. Thus the recorded data consisted of 24 time-indexed 7-dimensional vectors. Fig. 5 shows the descriptiv e statistics of the collected data. B. Classification The dataset of 111 trials was randomized and split into 90 sensor traces allocated for training and validation and 21 traces held out for testing. The training and validation dataset consisted of 44 examples of “Pulp” torque traces and 46 examples of “Peel”. As discussed, each trace contained of 24 time-indexed samples of torque reading for each of the 7 joints. Thus, in total the training and validation dataset contained 1,056 and 1,104 individual e xamples of “Pulp” and “Peel” torque readings, respectively . The classifier’ s input comprised of an 8-dimensional vector (7 torque readings for each of the joints, plus the time index). The objective of the classification task was to estimate the probability of the measurement being taken inside of either medium giv en the current torque measurements. In our approach, a desirable property of a classifier is to be robust to the outliers and to handle the ambiguous inputs by reporting the appropriate lev els of uncertainty (i.e. to avoid being o verconfident). W e used a logistic regression model, which we validated using the K-fold cross-validation technique with 10 folds. Thus, each fold used 81 e xamples for training and 9 examples for validation. The v alidation and test results are giv en in T able I. It should be noted that the modelling approach has an inherently noisy training process. Since all of the 24 torque samples in the sensor trace share the same label defined by the task outcome, all the intermediate phenomena are disregarded. For instance, if knife was closely follo wing the desired boundary region throughout most of the execution but got stuck in the peel at the very end, all of the 24 torque readings would be labeled as “Peel”. Ho wev er , the ability to capture the uncertainty demonstrated by Logistic Regression model alle viates this issue (see Fig. 6), and in some respects this training process forces a more conservati ve probabilistic model. It is important to note that despite misclassifying −1.0 −0.5 0.0 0.5 1.0 1.5 2.0 2.5 3.0 Mean Torque + STD, Nm Joint 1 Peel Pulp −5 −4 −3 −2 −1 0 1 2 Joint 2 0 1 2 3 4 5 6 Joint 3 −1.5 −1.0 −0.5 0.0 0.5 1.0 Joint 4 −2.0 −1.5 −1.0 −0.5 0.0 0.5 1.0 1.5 2.0 Joint 5 −1.0 −0.5 0.0 0.5 1.0 1.5 Joint 6 −0.4 −0.2 0.0 0.2 0.4 0.6 0.8 1.0 Joint 7 −1.0 −0.5 0.0 0.5 1.0 1.5 2.0 2.5 Mean difference, Nm mean diff CI −3.0 −2.5 −2.0 −1.5 −1.0 −0.5 0.0 0.5 1.0 −1.0 −0.5 0.0 0.5 1.0 1.5 2.0 −0.6 −0.4 −0.2 0.0 0.2 0.4 −1.5 −1.0 −0.5 0.0 0.5 −0.2 −0.1 0.0 0.1 0.2 0.3 0.4 0.5 0.6 −0.3 −0.2 −0.1 0.0 0.1 0.2 0.3 0 5 10 15 20 0.0 0.2 0.4 0.6 0.8 1.0 STD, Nm Pulp Peel 0 5 10 15 20 0.0 0.5 1.0 1.5 2.0 2.5 0 5 10 15 20 0.0 0.2 0.4 0.6 0.8 1.0 1.2 1.4 0 5 10 15 20 Timestamp 0.0 0.1 0.2 0.3 0.4 0.5 0.6 0 5 10 15 20 0.0 0.5 1.0 1.5 2.0 0 5 10 15 20 0.00 0.05 0.10 0.15 0.20 0.25 0.30 0.35 0 5 10 15 20 0.00 0.02 0.04 0.06 0.08 0.10 0.12 Fig. 5. Summary statistics for collected torque data. Note that the most dominant joints in the used DMP are joints 1, 2 and 3. 0 5 10 15 20 Timestamp −2 −1 0 1 2 3 4 Torque, Nm Joint 1 0 5 10 15 20 Timestamp −12 −10 −8 −6 −4 −2 0 2 4 Joint 2 test mean peel mean pulp 0 5 10 15 20 Timestamp 0 2 4 6 8 Joint 3 0 5 10 15 20 Timestamp 0.0 0.2 0.4 0.6 0.8 1.0 Pr(Fail) Belief Fig. 6. Medium classification based on torque readings. The test trace (black solid line) represents a trial where the knife got stuck inside the peel at the middle of the execution until its final release at time step t = 19 . The red background signifies the classifier’ s binary decision (red denotes the peel) at time step t . Note, that only 3 most dominant joints are displayed. T ABLE I L O GI S T I C R E GR E S S IO N M O DE L E V A L UA T I ON V alidation T est Predicted Peel Predicted Pulp Predicted Peel Predicted Pulp Actual Peel 673 431 174 66 Actual Pulp 306 750 65 199 Sensitivity 0.61 0.73 Specificity 0.71 0.75 Misclas. rate 34% 26% some intermediate samples, the trained model does not commit to any extreme beliefs over the mediums, unless the test input is strongly representati ve of a given class. Finally , in the case of ambiguous test inputs (i.e. where torque lev els of the input trace appear uncharacteristic for a giv en label), the model demonstrates desirable le vels of uncertainty , which is extremely important giv en the fact that we seek to use this for feedback control. V I . O N L I N E D M P A D A P T A T I O N W e reused the nominal DMP and trained classifier from the pre vious section and constructed the closed-loop control scheme as shown in Fig. 3. First, the nominal joint trajec- tory associated with learned DMP is transformed into the end-effector’ s trajectory in the Cartesian space, where all T ABLE II M E TH O D C O M P A R IS O N Control scheme Open-loop Closed-loop Successful trials 55 36 F ailed trials 56 14 Success rate 50% 72% the required corrections are relativ ely straightforward. As discussed previously , we use the probability of the knife being inserted into the peel for deriving the required motion corrections. W e used a simple motion correction scheme for experimentation, in which the first half of the scooping motion (where the most dominant movement component in volves pushing the knife downw ards) is modulated tow ards the center of the grapefruit. In the second half of the mov ement (where the knife slides under the segment while moving towards the center of the grapefruit), the motion was modulated upwards. Thus, in each of the cases, the knife deviates from the peel re gion towards the pulp region, when the estimated probability of peel increases. For both cases we used a gain of 0.01m (i.e. 100 % probability of peel would translate the movement 10mm away from the nominal trajectory in the prescribed direction). It should be noted that more complex schemes can be applied, e.g. modulation in the direction of the normal to the side of the knife. For this experiment we conducted 50 trials of grapefruit scooping on randomly chosen segments in a total of 12 different grapefruits. As in the previous section, a successful trial required the complete extraction of an intact segment without the knife getting stuck inside the peel. The results are provided in the T able II. 36 out of 50 trials achieved successful task completion. In all of the 14 failed attempts, the knife entered the peel at the start of the cut and prop- agated deeply before the peel could be classified. In these cases, the mov ement corrections towards the center of the grapefruit failed, as the knife could not tear the peel with the side of the blade. Perhaps, in such cases the DMP can be re versed and re-applied with estimated corrections, as the classifier successfully reflected the ev ent of knife being stuck in the peel. In the successful trials, the knife visibly responded to the local increase in the resistance throughout the mov ement ex ecution. It was clear that online movement adaptation im- prov ed the se gment separation. Since the modulated motion acts in the direction approximately orthogonal to the bound- ary , it introduces a tearing effect. Similar tearing motions can be observed in human executed grapefruit scooping, where a knife’ s reorientation lowers movement resistance by tearing through the fibers. It should also be noted that the described task is strongly dependent on sev eral factors. First, the nominal DMP plays an important role in the success of the task. Since the proposed method relies on torque readings gathered from the execution of the nominal trajectory , a poorly chosen mov ement can severely impair the medium classification. Second, the experiment is highly sensiti ve to the sharpness of the knife, as well as the position of the grapefruit relati ve to the initial pose of the knife. Nevertheless, these e xperiments highlight the promise of uncertainty driven cutting between mediums with dif fering stiffness properties. V I I . C O N C L U S I O N S A N D F U T U R E W O R K W e present an uncertainty driv en feedback control law and demonstrated its performance on the task of grapefruit segmentation. This task is selected because it resembles a common surgical procedure where a hard tumour is extracted from soft tissue, and physical material properties used to guide human sur geons. Automating tasks of this form is extremely challenging, as it requires cutting along an uncertain boundary , subject to visibility constraints. Our experiments show that a simple movement correction scheme, where the mov ement of a robot arm is modulated along a single Cartesian axis in response to the probability of being in a given medium, significantly improves cutting performance. Future work inv olves the dev elopment of more complex movement adaptation schemes, and the extension of the approach to include higher level movement planning. R E F E R E N C E S [1] P . Long, W . Khalil, and P . Martinet, “Robotic deformable object cutting : From simulation to experimental validation, ” in European W orkshop on Deformable Object Manipulation (EWDOM). , 2014. [2] A. Y amaguchi and C. Atkeson, “Combining finger vision and optical tactile sensing: Reducing and handling errors while cutting vegeta- bles, ” in IEEE-RAS International Confer ence on Humanoid Robots . IEEE Computer Society , 2016, pp. 1045–1051. [3] X. Mu, Y . Xue, and Y . Jia, “Robotic cutting: Mechanics and control of knife motion, ” in 2019 International Conference on Robotics and Automation (ICRA) , May 2019, pp. 3066–3072. [4] V . Cristini and J. Lowengrub, Multiscale Modeling of Cancer: An In- te grated Experimental and Mathematical Modeling Approac h . Cam- bridge Univ ersity Press, 2010. [5] A. L. McKnight, J. L. Kugel, P . J. Rossman, A. Manduca, L. C. Hartmann, and R. L. Ehman, “MR elastography of breast cancer: preliminary results, ” American journal of r oentgenology , vol. 178, no. 6, pp. 1411–1417, 2002. [6] A. Jain, H. Nguyen, M. Rath, J. Okerman, and C. C. Kemp, “The complex structure of simple devices: A survey of trajectories and forces that open doors and drawers, ” in 2010 3r d IEEE RAS & EMBS International Confer ence on Biomedical Robotics and Biomechatr on- ics . IEEE, 2010, pp. 184–190. [7] M. Kalakrishnan, L. Righetti, P . Pastor , and S. Schaal, “Learning force control policies for compliant manipulation, ” in 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems , Sep. 2011, pp. 4639–4644. [8] A. Jain and C. Kemp, “Improving robot manipulation with data- driv en object-centric models of ev eryday forces, ” Autonomous Robots , vol. 35, no. 2-3, pp. 143–159, 2013. [9] P . Pastor , L. Righetti, M. Kalakrishnan, and S. Schaal, “Online movement adaptation based on previous sensor experiences, ” in IEEE International Conference on Intelligent Robots and Systems , 2011, pp. 365–371. [10] J. M. Romano, K. Hsiao, G. Niemeyer, S. Chitta, and K. J. Kuchen- becker , “Human-inspired robotic grasp control with tactile sensing, ” IEEE T ransactions on Robotics , v ol. 27, no. 6, pp. 1067–1079, Dec 2011. [11] A. Schneider, J. Sturm, C. Stachniss, M. Reisert, H. Burkhardt, and W . Bur gard, “Object identification with tactile sensors using bag-of- features, ” in 2009 IEEE/RSJ International Confer ence on Intelligent Robots and Systems . IEEE, 2009, pp. 243–248. [12] J. A. Fishel and G. E. Loeb, “Bayesian exploration for intelligent identification of textures, ” F r ontiers in Neur or obotics , vol. 6, no. JUNE, 2012. [13] F . C. Moon and T . Kalm ´ ar-Nagy , “Nonlinear models for complex dynamics in cutting materials, ” Philosophical T ransactions: Mathe- matical, Physical and Engineering Sciences , vol. 359, no. 1781, pp. 695–711, 2001. [14] G. Zeng and A. Hemami, “ An adaptiv e control strategy for robotic cutting, ” in Proceedings of International Conference on Robotics and Automation , vol. 1, April 1997, pp. 22–27 vol.1. [15] A. G. Atkins, X. Xu, and G. Jeronimidis, “Cutting, by ‘pressing and slicing, ’ of thin flopp y slices of materials illustrated by experiments on cheddar cheese and salami, ” J ournal of Materials Science , vol. 39, no. 8, pp. 2761–2766, Apr 2004. [16] I. Lenz, R. Knepper , and A. Saxena, “DeepMPC: Learning deep latent features for model predictive control, ” in Robotics: Science and Systems XI , 2015. [17] S. Tian, F . Ebert, D. Jayaraman, M. Mudigonda, C. Finn, R. Calandra, and S. Levine, “Manipulation by feel: T ouch-based control with deep predictiv e models, ” in 2019 International Conference on Robotics and Automation (ICRA) , 2019. [18] M. C. Gemici and A. Saxena, “Learning haptic representation for ma- nipulating deformable food objects, ” in 2014 IEEE/RSJ International Confer ence on Intelligent Robots and Systems , Sep. 2014, pp. 638– 645. [19] A. J. Ijspeert, J. Nakanishi, H. Hof fmann, P . Pastor, and S. Schaal, “Dynamical mov ement primitiv es: Learning attractor models for motor behaviors, ” Neural Computation , vol. 25, no. 2, pp. 328–373, Feb 2013. [20] P . Pastor, H. Hoffmann, T . Asfour , and S. Schaal, “Learning and generalization of motor skills by learning from demonstration, ” in 2009 IEEE International Conference on Robotics and Automation , May 2009, pp. 763–768. [21] P . P astor , M. Kalakrishnan, S. Chitta, E. Theodorou, and S. Schaal, “Skill learning and task outcome prediction for manipulation, ” in 2011 IEEE International Conference on Robotics and Automation , May 2011, pp. 3828–3834. [22] S. V ijayakumar and S. Schaal, “Locally weighted projection regres- sion: An o(n) algorithm for incremental real time learning in high dimensional space, ” Pr oceedings of the Seventeenth International Confer ence on Machine Learning (ICML 2000) , vol. V ol. 1, 05 2000.
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment