Drone-Assisted Communications for Remote Areas and Disaster Relief
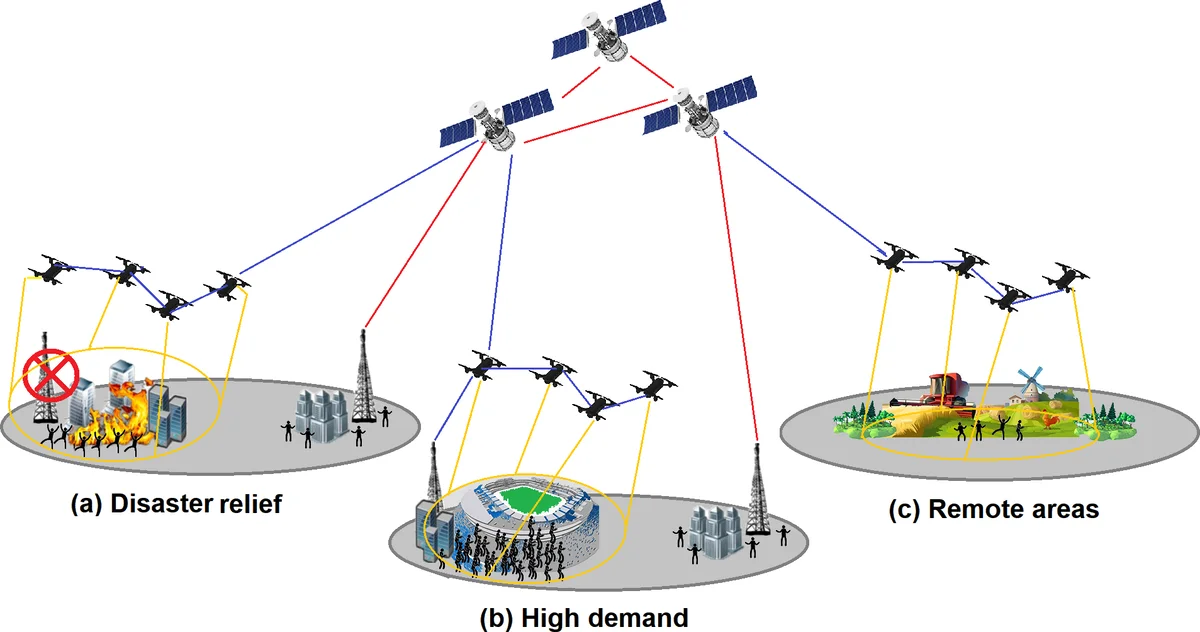
We explore an end-to-end (including access and backhaul links) UAV-assisted wireless communication system, considering both uplink and downlink traffics, with the goal of supporting demand of the Ground Users (GUs) using the minimum number of UAVs. Moreover, in order to extend the operational (flight) time of UAVs, we exploit an energy-aware routing scheme. Our intention is to design and analyze the access and backhaul connectivity of a drone-assisted communication network for remote and crowded areas and disaster relief, while minimizing the resources required i.e., the number of UAVs.
💡 Research Summary
**
The paper addresses the design of a UAV‑assisted wireless communication system that can serve remote, sparsely populated regions as well as disaster‑relief scenarios where existing infrastructure is either absent or severely damaged. Unlike most prior work that focuses solely on the air‑to‑ground (A2G) access link, the authors treat the whole network—both the access links from ground users (GUs) to UAVs and the multi‑hop air‑to‑air (A2A) backhaul links among UAVs—as a single end‑to‑end problem. Their overarching goal is to satisfy the traffic demand of all GUs while using the smallest possible number of UAVs and extending the UAVs’ operational time through energy‑aware routing.
The methodology is divided into three distinct phases.
- User Clustering – The ground network is modeled as a graph (G(N,L)) with known links between GUs. Each node’s weight equals its total traffic demand. A weighted k‑means algorithm (with density‑based box initialization) partitions the users into clusters; the number of clusters (k) is derived from the demand matrix (D) and the spatial distribution of the users. This step ensures that high‑traffic areas receive more attention in the subsequent placement stage.
- UAV Placement – For each cluster, a UAV is initially positioned at the weighted centroid. A merging algorithm then iteratively combines UAVs whose cumulative served demand is below a preset capacity (C_{\max}), while preserving network connectivity (checked via graph‑theoretic methods such as minimum spanning trees). If after merging the network is still disconnected, a deterministic annealing (DA) procedure is invoked to add additional UAVs in optimal locations. DA gradually lowers a temperature parameter to avoid local minima, yielding a near‑global optimum placement that satisfies both coverage and connectivity constraints.
- Energy‑Aware Routing – The final phase formulates the routing of traffic over both A2G and A2A links as a Mixed‑Integer Linear Program (MILP). The objective function is a weighted combination of (i) maximizing the total supported traffic and (ii) minimizing the total power consumption of all UAVs. Constraints capture UAV flight‑time limits, per‑link capacity, connectivity requirements, and per‑UAV power caps. Solving the MILP produces a routing configuration that preferentially uses multi‑hop backhaul when it reduces power consumption, while still meeting latency and throughput requirements.
Experimental validation uses a scenario with 40 ground users distributed in three spatially separated clusters, each internally connected but mutually isolated. The authors compare three cases: (a) no UAVs, (b) UAV deployment without energy‑aware routing, and (c) UAV deployment with the proposed energy‑aware routing. Results show that, without UAVs, the fraction of unsupported traffic grows sharply as the number of origin‑destination (OD) pairs increases. Introducing UAVs reduces this fraction to near zero, demonstrating that the proposed placement algorithm can effectively bridge isolated clusters. When energy‑aware routing is applied, overall power consumption drops, but a trade‑off emerges: aggressive power saving can slightly increase the unsupported traffic fraction. This behavior reflects the practical tension between extending UAV endurance and guaranteeing service continuity—an especially critical issue in disaster‑relief operations where recharging opportunities may be scarce.
Key contributions of the work are:
- A demand‑driven weighted clustering approach that determines the minimal number of UAVs required for a given traffic pattern.
- A two‑step UAV placement strategy that first merges redundant UAVs and then employs deterministic annealing to guarantee connectivity, thereby achieving near‑optimal spatial deployment.
- An MILP‑based energy‑aware routing framework that jointly optimizes traffic support and power usage across both access and backhaul links.
The authors acknowledge that their current model assumes static ground topology and fixed UAV altitude. Future research directions include handling time‑varying user distributions, dynamic UAV repositioning, battery swapping or in‑flight charging strategies, and field trials in real disaster‑response environments. By integrating these extensions, the proposed framework could become a robust, scalable solution for rapid, energy‑efficient communication restoration in the most challenging scenarios.
Comments & Academic Discussion
Loading comments...
Leave a Comment