Accelerating dynamical peakons and their behaviour
A wide class of nonlinear dispersive wave equations are shown to possess a novel type of peakon solution in which the amplitude and speed of the peakon are time-dependent. These novel dynamical peakons exhibit a wide variety of different behaviours for their amplitude, speed, and acceleration, including an oscillatory amplitude and constant speed which describes a peakon breather. Examples are presented of families of nonlinear dispersive wave equations that illust rate various interesting behaviours, such as asymptotic travelling-wave peakons, dissipating/anti-dissipating peakons, direction-reversing peakons, runaway and blow up peakons, among others.
💡 Research Summary
The paper investigates a broad family of nonlinear dispersive wave equations of the form
(m_t + f(u,u_x)m + (g(u,u_x)m)x = 0,; m = u - u{xx}),
where (f) and (g) are arbitrary smooth functions of the field (u) and its spatial derivative (u_x). Classical peakons—solitary waves with a sharp crest—appear in many integrable equations (Camassa‑Holm, Degasperis‑Procesi, etc.) as travelling‑wave solutions (u(x,t)=a,e^{-|x-ct|}) with a fixed amplitude‑speed relation.
The authors show that when the nonlinearities (f) and (g) do not satisfy the symmetry conditions required for a constant‑amplitude travelling peakon, the same equation admits a new class of solutions they call dynamical peakons:
(u(x,t)=A(t),e^{-|x-X(t)|}).
Here both the amplitude (A(t)) and the peak position (X(t)) evolve in time, leading to a rich variety of behaviours not seen in the traditional setting.
Starting from the weak formulation, the dynamics of (A(t)) and (X(t)) are derived as a coupled system of ordinary differential equations:
(\dot A = -F_{-}(A,A),\qquad \dot X = G_{-}(A,A)/A),
where (F_{-}) and (G_{-}) are the odd parts (with respect to the sign change of (u_x)) of the antiderivatives (F=\int f,du_x) and (G=\int g,du_x). By expressing these odd parts in terms of the even components (f_0(u)) and (g_0(u)) of the original nonlinearities, the authors obtain a compact representation:
(\dot A = A,f_0(A),\qquad \dot X = g_0(A)).
Consequently, the amplitude evolution is governed solely by a scalar function (f_0) while the speed is dictated by (g_0).
Two lemmas give necessary and sufficient conditions for the existence of non‑trivial dynamical peakons and for them to possess non‑zero acceleration. In particular, a time‑dependent amplitude requires (f_0\neq 0); a non‑zero acceleration requires (g_0) to be non‑constant. These conditions also imply that momentum (M=2A(t)) and the Sobolev (H^1) norm (|u|_{H^1}=2A(t)^2) are not conserved unless the amplitude is constant. Hence accelerating dynamical peakons necessarily break the usual conservation laws that hold for integrable peakon equations.
Introducing the auxiliary functions
(\tau(A) = -\int^{A}\frac{dy}{y f_0(y)}) (a “time” function) and
(c(A) = g_0(A)) (the instantaneous speed), the solution can be written in quadrature form:
(A(t) = \tau^{-1}(t-t_1+\tau_1)),
(X(t) = X_1 - \int_{A_1}^{A(t)} \frac{c(y)}{y f_0(y)},dy).
If one defines (\alpha(A)=c’(A)), the acceleration is (\ddot X = \alpha(A(t))). This formulation makes clear that any prescribed evolution of amplitude and speed can be realized by an appropriate choice of the scalar functions (f_0) and (g_0).
To illustrate the theory, the authors focus on a family where (f_0(u)=k u^{p}) and (g_0(u)=\ell u^{q}) with constants (k,\ell) and exponents (p,q). Different exponent pairs generate distinct dynamical regimes:
- Amplitude blow‑up or extinction occurs when (p>0); the integral defining (\tau) reaches a finite value, causing (A(t)) to diverge or vanish in finite time.
- Dissipative or anti‑dissipative behaviour appears for (p<0); the amplitude decays or grows algebraically as (t\to\infty).
- Constant‑speed breathers arise when (p=0) (so (f_0) is constant) while (q=0) (so (c) is constant). The amplitude then evolves logarithmically, producing an oscillatory “breather” with fixed propagation speed.
- Direction‑reversing peakons are obtained for odd (q); the speed (c(A)=\ell A^{q}) changes sign when the amplitude crosses zero, leading to a reversal of motion.
- Runaway or runaway‑brake peakons correspond to (q>1) (accelerating) or (0<q<1) (decelerating) respectively, with asymptotic speeds approaching finite limits or diverging.
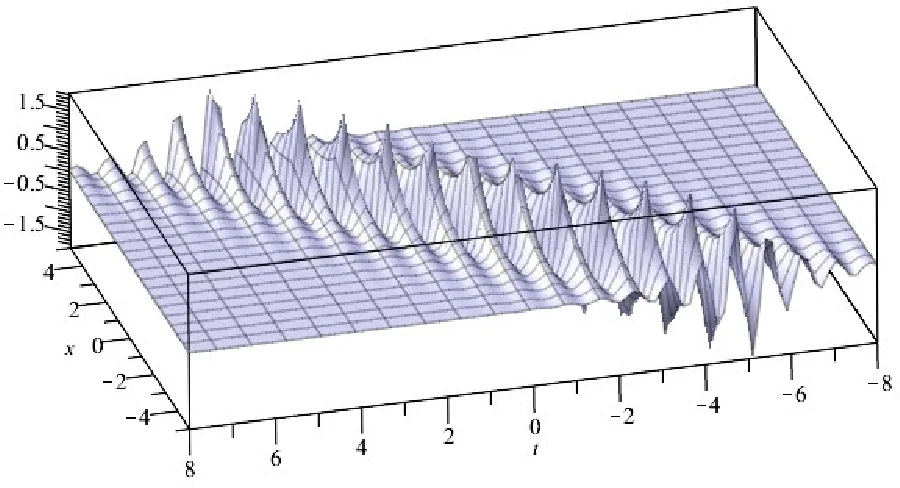
Explicit examples are worked out for each case, including analytical expressions for (A(t)) and (X(t)) and numerical plots that display the characteristic shapes (e.g., a peakon that grows then collapses, a peakon that slows down and reverses direction, a breather with periodic amplitude modulation).
A notable conclusion is that these dynamical peakons exist without any integrability requirements. Unlike soliton hierarchies, where multi‑soliton solutions typically demand a Lax pair, the presented peakon families arise purely from the structure of the weak formulation and the chosen nonlinearities. This broadens the applicability of peakon‑type models to non‑integrable physical contexts such as wave breaking, energy dissipation, or external forcing.
The paper ends with suggestions for future work: extending the analysis to multi‑peakon interactions, exploring higher‑order nonlinearities, and seeking experimental or high‑resolution numerical validation in fluid‑dynamics or optical‑wave settings. The discovery of accelerating, oscillatory, and direction‑reversing peakons opens a new avenue in the study of nonlinear wave phenomena, highlighting that sharp‑crested solitary structures can exhibit far richer dynamics than previously recognized.
Comments & Academic Discussion
Loading comments...
Leave a Comment