Map-based Millimeter-Wave Channel Models: An Overview, Hybrid Modeling, Data, and Learning
Compared to the current wireless communication systems, millimeter wave (mm-Wave) promises a wide range of spectrum. As viable alternatives to existing mm-Wave channel models, various map-based channel models with different modeling methods have been…
Authors: Yeon-Geun Lim, Yae Jee Cho, MinSoo Sim
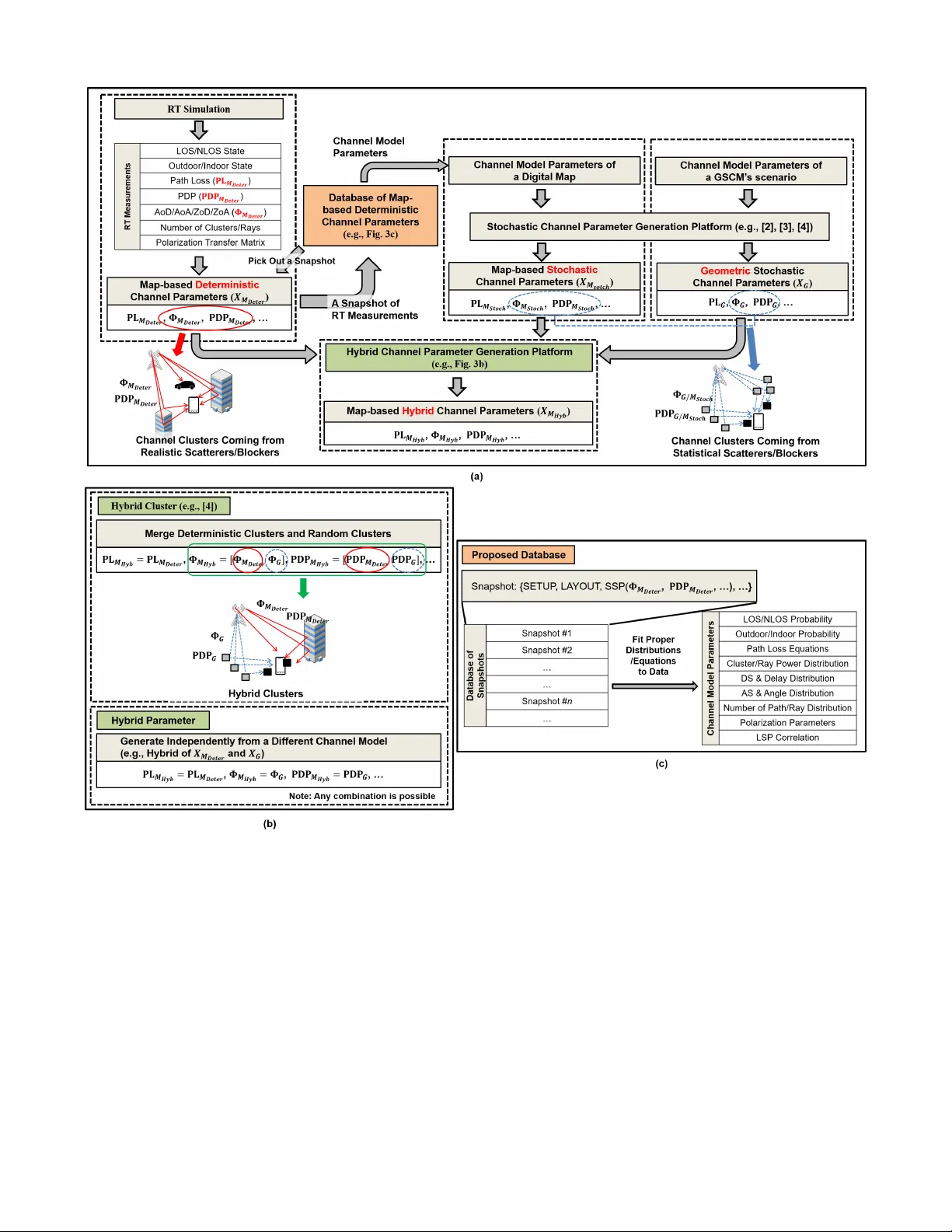
1 Map-based Millimeter -W a v e Channel Models: An Ov ervie w , Hybrid Modeling, Data, and Learning Y eon-Geun Lim, Student Member , IEEE, Y ae Jee Cho, Student Member , IEEE, Min Soo Sim, Student Member , IEEE, Y ounsun Kim, Member , IEEE, Chan-Byoung Chae, Senior Member , IEEE, and Reinaldo A. V alenzuela, F ellow , IEEE Abstract —Compared to the current wireless communication systems, millimeter wav e (mm-W a ve) promises a wide range of spectrum. As viable alternatives to existing mm-W a ve channel models, various map-based channel models with different mod- eling methods have been widely discussed. Map-based channel models are based on a ray-tracing algorithm and include realistic channel parameters in a given map. Such parameters enable resear chers to accurately evaluate novel technologies in the mm- W a ve range. Diverse map-based modeling methods result in different modeling objecti ves, including the characteristics of channel parameters and different complexities of the modeling procedur e. This article outlines an overview of map-based mm- W a ve channel models and proposes a concept of how they can be utilized to integrate a hardware testbed/sounder with a software testbed/sounder . In addition, we categorize map- based channel parameters and provide guidelines f or hybrid modeling. Next, we share the measurement data and the map- based channel parameters with the public. Lastly , we evaluate a machine learning-based beam selection algorithm through the shared database. W e expect that the offered guidelines and the shared database will enable researchers to readily design a map- based channel model. Index T erms —Millimeter -wave, new radio, channel model, ray- tracing, system-level simulation, link-level simulation, and 5G. I . I N T RO D U C T I O N F UTURE fifth-generation (5G) communication systems will include substantial types of service in volving en- hanced mobile broadband, massive machine-type communica- tion (mMTC), and ultra-reliable low-latenc y communication. Researchers hav e discussed numerous applications of such ser- vice types, including the Internet of Things, Internet of drones, gigabit wireless connectivity , and autonomous vehicles. They hav e been also debating potential frequency bands to service such applications [1]. These new applications and services will be launched in the millimeter-wa ve (mm-W a ve) range due to a shortage of bandwidth in the sub-6 GHz bands, which legac y radio communication systems have made tremendous use of because of the excellent radio propagation property . Y .-G. Lim, M. S. Sim, and C.-B. Chae are with the School of Inte- grated T echnology , Institute of Conver gence T echnology , Y onsei Univer - sity , Korea (e-mail: { yglim, simms } @yonsei.ac.kr, cbchae@ieee.org). Y .- J. Cho is with Mercedes-Benz Research & Dev elopment, Korea (e-mail: yaejee.cho@daimler .com). Y . Kim is with Samsung Electronics, Korea (e- mail: younsun@samsung.com). R. A. V alenzuela is with Nokia Bell Labs., NJ, USA (e-mail: reinaldo.valenzuela@nokia-bell-labs.com). Corresponding author is C.-B. Chae. This research was supported by the MSIT (Ministry of Science and ICT), K orea, under the “ICT Consilience Creativ e Program” (IITP-2019-2017-0- 01015) supervised by the IITP (Institute for Information & communications T echnology Promotion). Mm-W av e channel models ha ve been thoroughly in vestigated through extensiv e measurements and simulations and accurate models are vital for the design of mm-W ave communication systems. The sub-6 GHz channel models for system-lev el ev aluation, which are usually based on geometry-based stochastic channel models (GSCMs), have focused on ev aluating the performance of point-to-point communications or multiple-input multiple- output (MIMO) systems with a small number of antennas (up to eight in L TE). These models have performed with the regular cell size of L TE (e.g., 200 m for an urban micro (UMi) scenario) and are based on a base station to user equipment (BS-UE) link type. Recent mm-W ave channel models hav e not only included the inherent characteristics of the mm- W av e channels, but have also added channel properties for 5G communication technologies, such as massive MIMO (M- MIMO) and hybrid beamforming [2]–[4]. Ne vertheless, these existing GSCMs are concentrated on modeling BS-UE links with a regular cell size and cannot support all modeling requirements for ne w 5G applications due to the lack of channel measurement campaigns for various link types [5]. Map-based mm-W av e channel models that utilize ray- tracing (R T) hav e gathered momentum. These models serve as a way to model the irregular layouts of small cells and to support ne w applications’ link types, including device- to-device (D2D), v ehicle-to-everything (V2X), and air-to- ev erything (A2X). Moreov er , researchers hav e utilized R T not only to ev aluate hardware (HW) testbeds [6]–[8] but also to validate the theoretical performance of vital 5G tech- nologies [1], since R T can cover a wide range of modeling specifications and has only a minor discrepancy with HW measurements [5], [8]–[10]. Some popular mm-W ave channel models hav e also adopted R T techniques or map-based mod- els. For example, NYU WIRELESS dev eloped the NYUSIM model by complementing HW channel measurements with R T [2]. The METIS group proposed a map-based channel model supporting various modeling requirements of 5G [3]. The 3GPP model adopted a hybrid of a GSCM and a map- based model [4], which was accepted in the ITU-R IMT -2020 ev aluation report. Before adopting the hybrid channel model, the engineers behind the 3GPP model discussed many kinds of hybrid channel modeling methods that differed in both generating and combining the channel parameters of a GSCM and a map- based model. Since such methods not only result in different modeling objectiv es, including characteristics of the channel 2 Fig. 1: An illustration of a map-based model and its characteristics: (a) multipath channel parameters from R T ; (b) a realistic cell layout in the digital map of GangNam Station, Seoul, South Korea; (c) possible link types; (d) cell coverage in real building en vironment. In this case, BS-to-BS interference is non-ne gligible; (e) irre gular cell co verages based on a digital map of V eritas C in Y onsei Uni versity . In this illustration, W iSE, an R T software de veloped by Bell Labs [10], is used to show the digital map and predict coverage. The heights of the BSs and the UEs are, respecti vely , 3 m and 1 m, and the center frequency is 28 GHz. parameters and complexities of the modeling procedure, but also ha ve the potential to be used in dif ferent venues, how to appropriately categorize these methods remains an open area for study at 3GPP to make the modeling objectiv e of each hy- brid approach clear . Note that the con ventional classifications of map-based channel models hav e not specifically categorized hybrid models, although they hav e included two categories, a deterministic (and/or semi-deterministic) channel model and a hybrid channel model between the first category and a GSCM. Recently , researchers hav e utilized map-based channels to ev aluate the accuracy of machine learning-based algorithms and to consider practical scenarios [11]. Machine learning- based algorithms are used for searching a pattern of certain parameters. T raining data for ev aluating this algorithm should hav e user - or cell-specific information, which means map- based channel models are attracti ve candidates of training data. This article provides an overvie w of map-based mm-W ave channel models. The motiv ation for it lies in the fact that researchers hav e paid attention to designing a map-based mm- W av e channel model, while still considering why map-based channel models–rather than GSCMs–should be utilized in the mm-W av e range. W e also propose a categorization of map- based channel parameters and provide guidelines for modeling each categorization. Finally , we share with the public the measurement database of the channel parameters for specific indoor and outdoor regions and for ev aluating machine learn- ing algorithms, which anyone can download and use for free. 1 T o the best of our kno wledge, this is the first work that not only categorizes map-based hybrid channel models but also shares the database of map-based channel parameters. This cat- egorization ensures that a hybrid channel model is ef ficiently utilized by considering the different modeling objecti ves and requirements for various 5G mm-W a ve systems. Most prior work on map-based channel models [3], [9] were focused on proposing R T algorithms, offering specific procedures for channel coefficient generation, and validating their models. Nonetheless, some researchers might not be familiar with modeling the map-based channel or realizing a digital map that depicts real-world buildings to be used for R T . W e expect that both the offered guidelines and the shared database will encourage researchers, ev en those researchers without R T software, to readily design a map-based channel. I I . W H Y S H O U L D W E U T I L I Z E M A P - BA S E D C H A N N E L M O D E L S I N T H E M M - W A V E R A N G E ? In this section, we start with a brief update on the recent progress of existing mm-W ave GSCMs. Then, we provide the advantages of map-based channel models compared to GSCMs. 1 The details of the database and its manual are av ailable at http://www .cbchae.org/. W e also present a demo video of our RT simulations in various scenarios, including the digital map realization methods. 3 Mm-W av e is going to be an important component of 5G deployment. Ho wev er , some inherent properties of mm-W ave propagation-links, such as high path loss, high penetration loss, and blockages, induce high propagation-link loss. Con- sequently , engineers must try to achie ve a higher propagation gain using technologies such as large array antenna systems. In such systems, the spherical wa ve assumption (not plane wa ve assumption) is plausible due to the large size of the arrays regarding wa velength. Moreov er, if receiv ers (RXs) are located a short distance away from each other in a multi- user M-MIMO or an mMTC scenario, the correlations of cluster- and ray-specific random variables are very high; that is, the channel is spatially consistent [5], [12]. Considering these characteristics of the mm-W ave channel, the additional features in the existing mm-W a ve GSCMs can be summarized as follo ws: 2 • Channel parameters, such as lar ge-scale parameters (LSPs–e.g., path loss, delay spread (DS), angle spread (AS), the number of clusters and rays, etc.) and small- scale parameters (SSPs–e.g., azimuth angle of departure (AoD), azimuth angle of arriv al (AoA), zenith angle of departure (ZoD), zenith angle of arri val (ZoA), power delay profile (PDP), etc.), are determined by considering the center frequencies of various operating bands and frequency selectivity due to the broad system bandwidth. • The receiv ed powers and the total number of clusters and rays are relati vely fewer than those in the sub-6 GHz range by taking into account high propagation-link loss. • The spatial consistency can be applied based on the correlation distance and user’ s movement. • W ith the large array antenna assumption, one can model the individual time of arriv al and angle offsets for all rays per link between transmit and receiv e antennas. A. New Modeling Requirements of Emerging Applications in the mm-W ave Range Map-based channel models (also kno wn as site-specific propagation models) generate multi-path channel parameters, as illustrated in Fig. 1a, by utilizing R T [3], [9]. A customized three-dimensional digital map is used to organize a realistic cell layout, as shown in Fig. 1b. Although the existing mm- W av e GSCMs have exploited the essential features of the mm- W av e channel as mentioned above, these features and their target scenarios are limited by a link type such as traditional BS-UE as listed in T able I. For example, it is hard to design outdoor channels with different inter-site distances (ISDs) shorter than 200 m because the statistical channel parameters of GSCMs is v alid within their minimum ISD, 200 m, and with regular cell topologies. Many types of applications, howe ver , will appear with dif ferent link types as shown in Fig. 1c. Note that covering all modeling r equir ements for such appli- cations is almost impossible with existing GSCMs, which still have insuf ficient channel measur ement campaigns. Meanwhile, in addition to including the essential features of mm-W av e 2 W e concentrate on some popular mm-W av e channel models, such as the 3GPP model, the METIS model, and the NYUSIM model in this article. channel in the GSCMs, map-based models also handle the following modeling requirements that are not limited: Short-Range Communication Links: The shorter the link is, the more the map-based models can depict the channel characteristics influenced by surrounding topography . In 5G, cell sizes are likely to shrink for high network density . In practical small cell topographies, the coverage of each cell varies due to the assorted shapes and heights of surrounding structures, as illustrated by the irregular cell co verages in Figs. 1d and 1e. Thus, the lev el of the intercell interference will be dependent on the real geometry while in a GSCM, this lev el is mainly dependent on the distance between the BS and the UE due to the regular cell layout. Fig. 1d shows that the lev el of the BS-to-BS interference can be high as much as the receiv ed po wer at downlink in the full-duplex operation. This lev el was underestimated in previous studies with GSCMs due to the lar ge separation between the BSs. Realistic Indoor En vironments: In outdoor-to-indoor (O2I) paths, if RXs are located indoors, penetration loss by both external and internal walls should be considered for more accurate modeling. Although many scenarios support indoor users (e.g., 80 percent of users in outdoor scenarios) and penetration loss is essential in a mm-W ave channel, the 3GPP model does not fully consider internal walls. In indoor-to- indoor (I2I) paths, blockers can be in the middle of the paths if a transmitter (TX) and an RX are at similar heights. V arious Mobility T ypes: The new applications of mm- W av e systems will support various mobility types. Both dual- mobility of the link ends and the mobility of blockers should also be considered to ensure accurate channel-modeling for certain link types such as the D2D link. Notably , in indoor communications, researchers should tak e into consideration devices moving from room to room or from floor to floor . User -Specific Channel Parameters: In GSCMs, LSPs of each cell are randomly generated from the same distribution, regardless of cell topography; SSPs per user are generated from the cell-specific LSPs, re gardless of users’ location within the cell (except for LOS angle parameters). These would yield an inaccurate performance e valuation of cell- and user-specific technologies. These technologies include, for instance, the beam selection based on machine learning that classifies beam indices based on user -specific information [11]. Channels on Different Frequencies: Map-based channel models can measure channels of a specific TX/RX pair on different frequencies, while GSCM cannot measure them. 5G will allow the devices of which functions are operated on different frequencies. These devices include numerology mul- tiplexing, which supports different service types on different subbands [1], integrated access backhual technologies, and the beamforming operation when control and data signals are on different frequency bands. B. Consistent Evaluation for the T ar get Scenario Recent mm-W av e technologies have emer ged within various scenarios. Some technologies can enhance system performance by utilizing characteristics of the mm-W av e channel. T o pre- vent either ov er- or underestimated link-level ev aluation, re- searchers should use an appropriate channel model that depicts 4 Fig. 2: Channel parameter modeling using map-based channels: (a) the digital map for a practical indoor scenario where the RXs are uniformly distributed in a building; (b) an indoor scenario with 3GPP-like random blockers where channel parameters are measured in the shaded area; (c) simulation parameters; and (d) simulation results. In this illustration, we use W ireless InSite, the R T software de veloped by Remcom. The coverage is denoted as η . well the servicing scenario of their proposed technologies. For example, Fig. 2d shows the probability mass functions (PMFs) of the number of the clusters and rays that are measured from an indoor digital map in Figs. 2a and 2b. T o obtain the PMFs, three scenarios are considered–a practical indoor scenario in which there are many blockers in the b uilding, an indoor scenario with no blockers, and an indoor scenario with fiv e blockers around the RX (similar to the 3GPP blockage model). Figure 2d shows similarity in the PMFs of the number of the clusters among three indoor scenarios, and the number of clusters can be smaller than that of an UMi scenario deriv ed from the distribution in [2]. For practical purposes, the cov erage shrinks, and some weak clusters consisting of one ray vanish due to the presence of many blockers. The maximum number of rays per cluster decreases when deploying 3GPP- like blockers due to a good deal of surrounding block ers. These results are related to the rank of a channel, which af fects not only MIMO performance, but also the accuracy of channel estimation algorithms that utilize the sparsity of the channel. 5 C. Map-based SW T estbed/Sounder One significant use case of the map-based channel model is the integration of a HW and a software (SW) testbed/sounder . This use case has not been discussed widely . W e can reconfirm the result of the HW testbed by link-level ev aluation in the map-based model that describes the test site of the HW testbed; and we can extend this ev aluation into system-lev el ev aluation of a HW testbed. Besides, the real-world channel measurements can be double-checked in a similar way . Feasible System-lev el Evaluation of a HW T estbed Using a Map-based SW T estbed: In the interest of the dev elopment of nov el mm-W av e technologies, both their theoretical model and algorithm implementation have been jointly ev aluated, under various scenarios, through a SW testbed from the link to system lev els. Notwithstanding the versatility of a SW testbed, it is crucial to prototype a HW testbed before implementing technologies in the real world. System-lev el ev aluation using a HW testbed is, ho wever , laborious, so a HW testbed usually assesses a technology at the link-lev el. System- lev el ev aluation is desirable due to the complex radio-links of the mm-W av e systems supporting complicated scenarios for various applications. If system-lev el ev aluation using a HW testbed is practically feasible, it will promote advancing the mm-W av e system. One option to perform system-level ev aluation using a HW testbed is to integrate the HW testbed with a map-based SW testbed. W ith reflecting a link-le vel e valuation result of a HW testbed into that of a SW testbed (i.e., calibration), the system- lev el evaluation can be conducted in the digital map consisting of the test site. W e describe two related w ork below . • The authors in [6] and [7] fabricated RF lenses that oper- ated at 77 GHz and 28 GHz respectiv ely , and measured their HW performance. They then e valuated an RF lens- embedded MIMO system at the system lev el by com- bining HW measurements and specific algorithms, which were a proposed codebook in [6] and the standard mm- W av e beamforming scheme in 802.11 (e xhaustive search by beam sweeping) in [7], with map-based channels. Channel Measurement based on a Map-based SW chan- nel sounder: Another use of the inte gration based on a map- based channel model is to allow it to play the role of a SW channel sounder by utilizing the measurements of a real- world channel sounder . This concept enables the measurement of channel characteristics and the assessment of theoretical technologies, and it includes the existing mm-W a ve channel model as follo ws: • The authors in [13] measured LSPs and SSPs by using a 60 GHz channel sounder . They calibrated the map- based channel and e valuated theoretical beamforming technologies in a digital map. • NYU WIRELESS utilized R T results to complement the HW channel sounder . R T recreated the absolute propa- gation time of arriv als from BS-UE links and retriev ed AoA distrib ution for the validity of the model [2]. I I I . C AT E G O R I ZAT I O N A N D G U I D E L I N E S F O R G E N E R A T I N G M A P - B A S E D C H A N N E L P A R A M E T E R S In this section, we categorize map-based channel parameters from a modeling approach perspecti ve. Then, we provide guidelines for both modeling each cate gory and selecting a proper category . Figure 3 shows an illustration of the categorizations and generalized channel parameter generation. Before generating channel parameters, a user first selects a proper channel model according to the target scenario and the modeling requirements. In the next step, the user determines the system setup and a network layout. W e describe this step if a map-based channel model is selected as follo ws: • System Setup: In the first step, the digital map is realized based on material information of walls provided in [14]. 3 This map represents the area and scenario for the target application and its adopted technologies. The second step in volv es setting up the system parameters of the target application’ s TX/RX such as antenna patterns of the TX/RX, their array configurations, and so on. • Network Layout: TXs/RXs as well as random objects are dropped into the digital map. Next, a beamforming pattern is applied together with the resource allocation for each TX/RX combinations. Finally , channel parameters such as LOS state and SSPs, are generated. Note that details of channel parameter gener - ation methods are dependent on the R T simulator and/or the platform such as–the stochastic channel parameter-generating platforms in [2]–[4]–which can be chosen by a user . As argued in the following subsections, these channel parameters can be categorized as shown in Fig. 3a. A. Cate gory I – Map-Based Deterministic Channel P arame- ters An R T simulator generates deterministic channel parameters at the particular TX/RX locations. This approach ensures that the channel parameters are accurate for a gi ven netw ork layout. Since the channel snapshot represents only the characteristics of the giv en locations of the random scatterers and blockers, their locations change according to their mobility and trajec- tory at the next snapshot; this is contrasted with stochastic parameters in which their impact is in volv ed. The channel parameters generated from either the con ventional map-based channel models [3] or the typical R T simulators fall into this category . B. Cate gory II – Map-Based Stochastic Channel P arameters The channel model parameters such as stochastic LSPs are determined from as many deterministic channel snapshots as possible in both a target scenario and a gi ven digital map. Map- based stochastic channel parameters are generated according to the chosen stochastic channel parameter -generating platform by replacing the chosen platform’s channel model parameters with the fitted channel model parameters of the snapshots . W ithin the mm-W ave range, this cate gory has yet to be studied. 3 The measurement results for building materials in various center frequen- cies are available at http://wireless.engineering.nyu.edu/ (e.g., [15]). 6 Fig. 3: An illustration of categorizations and generalized channel parameter generation: (a) a block diagram of channel parameter generation for each category; (b) subcategories and examples of map-based hybrid channel parameters; (c) an illustration of the proposed database. Meanwhile, in the sub-6 GHz range, the channel model in [1] falls into this category where the authors fitted LSPs to their R T measurements and generated channel parameters through the platform in the 3GPP model. C. Cate gory III – Map-Based Hybrid Channel P arameters Hybrid channel parameters are complementary to the chan- nel parameters from a dif ferent channel model or to the HW measurements. W e present modeling guidelines for three subcategories of map-based hybrid channel parameters. The examples are described in Fig. 3b Category III.A – Hybrid Cluster: The channel param- eters consist of deterministic clusters that are composed of deterministic channel parameters and random clusters that are composed of GSCM’ s channel parameters. These clusters are treated as independent clusters, b ut are merged after clustering. For example, the map-based deterministic channel parameters for deterministic clustering and the GSCM’ s channel param- eters for random clustering merge into the hybrid cluster , which means both angle parameters and PDPs are generated from both models. The 3GPP model supports this subcategory because of good compatibility with its own GSCM. Category III.B – Hybrid Parameter: T o compensate for 7 T ABLE I: Summary of the Proposed Database and the Con ventional mm-W ave Channel Models the shortcomings of each channel parameter , each one is independently generated from a different channel model. For example, PDPs are generated from a map-based stochastic channel model and path losses are generated from a map- based deterministic channel model. The advantage of hybrid parameter compared with the hybrid cluster is the simpler implementation it permits. Category III.C – Hybrid of Deterministic Parameters and HW Measurements: In this case, the map-based deter- ministic channel parameters are combined into the channel coefficient with the calibration factors, as mentioned in Sec- tion II-C. The NYUSIM model utilized this subcategory . D. Guidelines for Cate gory Selection Here, we provide some guidelines for selecting a category regarding the target link type/scenario and modeling require- ments. W e assume that, as is the case with GSCMs, the channel model parameters of a digital map are predetermined. • Cate gory I , Cate gory II , or the hybrid of both should be selected if channel parameters need to almost perfectly reflect practical b uilding en vironments. • Cate gory III.A or Cate gory III.B between a GSCM and a map-based channel model can be selected if channel parameters need to reflect both practical building envi- ronments with irregular cell layouts and the statistical real-world channel measurements of the target scenario. A recommendable use case is the 3GPP hybrid model that generates random clusters by combining GSCM’ s parameters and deterministic clusters’ parameters for their compatibility [4]. Another use case is that the user- specific channel parameters are predicted from a map- based channel model while the others are generated through a GSCM. • If Cate gories I-III can be selected, the selection among them depends on modeling complexity . The details are giv en below . The higher accuracy Cate gory I ’ s parameters hav e, the higher their generating complexity gets. Each snapshot of Cate gory I represents the deterministic channel for a giv en TX/RX location while Category II ’ s parameters are not fully dependent on a TX/RX location. Generating Cate gory II ’ s parameters has equal complexity with the GSCMs in the same generation platform while these parameters still represent the characteristic of the digital map. It is thus obvious that the complexity of generating Category III ’ s parameters are intermediate between them. I V . D A T A B A S E O F M M - W A V E M A P - B A S E D C H A N N E L P A R A M E T E R S A. Concept for a Database of Deterministic Channel Snap- shots A database of deterministic channel snapshots has been devised to reduce the complexity of R T . Figure 3c illustrates that a channel snapshot can be picked out from the database according to the specific TX/RX locations for a given sys- tem setup. This method not only maintains the accuracy of the channel, but also reduces to a tremendous degree the complexity of channel generation (because it only requires a picking-out-algorithm). In addition, the database is necessary to determine stochastic LSPs for Cate gory II . B. Intr oduction to the Proposed Database In this section, we briefly introduce the proposed database. The database targets specific indoor and outdoor scenarios that were measured from the manufactured digital maps of the V eritas C building in Y onsei University and Gangnam Station in Seoul, respectiv ely , supporting the BS-UE and D2D link types. T able I summarizes the key feature of the channel model of the proposed database compared with the con ventional mm-W av e GSCMs and map-based channel models. The main advantages of the proposed database are that any researcher 8 Fig. 4: An illustration of the proposed database: (a) an example procedure for channel coefficient generation using the proposed database; (b) an example layout of grids. In this illustration, the grids of the BS locations in the outdoor scenario are shown. can design map-based channel models without an R T simulator and that digital map realization is not required. Figure 4a illustrates an example procedure for channel pa- rameter generation through the proposed database. W e provide a massi ve number of snapshots of TX/RX pairs. Thus, a user simply selects TX/RX grids and inputs a few parameters, including the scenario, the link type, and the TX/RX’ s floors. For example, a user can drop a TX in the digital map of Gangnam station by selecting a BS grid in Fig. 4b . Then, the database will provide the deterministic channel parameters of the selected TX/RX grids and the user-specific stochastic LSPs, DS and AS. The channel coefficient can be readily generated from the typical clustered channel model or through a chosen channel parameter generation platform. C. T raining a Machine Learning Algorithm with the Proposed Database The proposed database can provide a massiv e number of snapshots for a machine learning training set. Through this training set, we will sho w why map-based channels are more appropriate for ev aluating machine-learning-based algorithms. W e first propose a deep neural network (DNN)-based beam selection algorithm as illustrated in Fig. 5a. Its input is a PDP the number of rays of which is two or more and its output is the index of a beam codebook. Similar to the algorithm in [11], the required time for beam selection can be quite reduced compared with the exhaustiv e search by beam sweeping. Figure 5b shows CDFs of the performances of the proposed algorithm and random beam selection when a training set is generated by either GSCM or the proposed 9 Fig. 5: Performance e valuation through the proposed database: (a) an illustration of the proposed DNN-based beam selection algorithm and the simulation parameters; (b) CDFs of the performance of the proposed algorithm and random beam selection with different channel models. The x-axis represents the received power gain from algorithms against the exhausti ve search by beam sweeping. database. 4 The x -axis represents χ = | w w w ∗ dnn H H Hf f f dnn | 2 | w w w ∗ opt H H Hf f f opt | 2 in dB where w w w opt and f f f opt are the beamforming vectors at the RX and the TX determined by exhaustiv e beam selection, and w w w dnn and f f f dnn denote those determined by the proposed beam selection; and H H H denotes a channel matrix. W e assume the BS has a uniform linear array and tabulate simulation parameters in Fig. 5a. The results show that adopting different channel models can result in different conclusions. For example, the proposed beam selection algorithm has only 3-6 dB more gain than random beam selection abov e the median CDF due to the low accuracy (12.8 percent) when we adopt GSCM, so one may conclude the proposed algorithm does not work. Meanwhile, with the proposed database, we achie ve reasonable beamforming gain and higher accurac y (45.2 percent), so the DNN-based beam selection algorithm using PDP as an input shows its feasibility . The reason for the underestimation from GSCM is that although its PDP has a correlation with angu- lar parameters, it is not fully user-specific. Therefore, when we ev aluate machine-learning-based algorithms and need to consider user-specific channel parameters, map-based channel models should be employed. Also, the proposed database would be a good and con venient option for training these algorithms. V . C O N C L U S I O N This article has provided an overvie w of map-based mm- W av e channel models and guidelines of the categorization of map-based channel parameters that possess the following: the map-based deterministic channel parameter , the map- based stochastic channel parameter , and the map-based hybrid channel parameter . Map-based models should be utilized to consider the various modeling requirements of applications 4 For the simulation, NYUSIM was used as GSCM, but all GSCMs could follow the same trend. in the mm-W ave range, which possess short-range commu- nication links, realistic indoor environments, various mobility types, and user-specific channel parameters. In addition, map- based models can support a HW measurement validation at both link and system lev els so that it can be treated as a supplementary SW testbed/sounder . It would be ef ficient to perform a channel measurement campaign through a map- based SW channel sounder before firmly establishing the HW -based measurement procedure. Finally , we hav e made public the measurement database of the channel parameters for indoor and outdoor scenarios and for ev aluating machine learning algorithms. Through the proposed database, we ha ve concluded that researchers should utilize map-based channel models when they propose machine learning-based algorithms to prev ent their underestimation. Our future work will consist of improving the proposed DNN-based beam selection algo- rithm. W e will also design map-based V2X and A2X mm- W av e channel models and share their data motiv ated by a fact that the measurement procedure for such models would be complicated because a vehicular channel sounder for V2X links and an airborne channel sounder for A2X links should be de veloped. R E F E R E N C E S [1] Y .-G. Lim et al. , “W aveform multiplexing for new radio: Numerology management and 3D ev aluation, ” IEEE W ir eless Commun. Mag. , vol. 25, no. 5, pp. 86–94, Oct. 2018. [2] M. K. Samimi and T . S. Rappaport, “3-D millimeter-wa ve statistical channel model for 5G wireless system design, ” IEEE T rans. Micr ow . Theory T ech. , vol. 64, no. 7, pp. 2207–2225, July 2016. [3] ICT -317669 METIS Project deliverable D1.4 v .3, METIS Channel Mod- els , June 2015. [4] 3GPP TR 38.900 V14.3.0, Study on channel model for frequency spectrum above 6 GHz , June 2018. [5] J. Medbo et al. , “Radio propagation modeling for 5G mobile and wireless communications, ” IEEE Commun. Mag. , vol. 54, no. 6, pp. 144–151, June 2016. [6] T . Kwon et al. , “RF lens-embedded massive MIMO systems: Fabrication issues and codebook design, ” IEEE T rans. Micr ow . Theory T ech. , vol. 64, no. 7, pp. 2256–2271, July 2016. 10 [7] Y .-J. Cho et al. , “RF lens-embedded antenna array for mmwav e MIMO: Design and performance, ” IEEE Commun. Mag. , vol. 56, pp. 42–48, July 2018. [8] B. Ai et al. , “On indoor millimeter wave massiv e MIMO channels: Measurement and simulation, ” IEEE J . Sel. Areas Commun. , v ol. 35, no. 7, pp. 1678–1690, July 2017. [9] S. Y . Seidel and T . S. Rappaport, “Site-specific propagation prediction for wireless in-building personal communication system design, ” IEEE T rans. V eh. T echnol. , vol. 43, no. 4, pp. 879–891, Nov 1994. [10] V . Erceg et al. , “Comparisons of a computer-based propagation pre- diction tool with experimental data collected in urban microcellular en vironments, ” IEEE J. Sel. Ar eas Commun. , v ol. 15, no. 4, pp. 677–684, May 1997. [11] A. Klautau et al. , “5G MIMO data for machine learning: Application to beam-selection using deep learning, ” in Pr oc. Inf. Theory and Appl. W orkshop (IT A) , Feb. 2018, pp. 1–9. [12] S. Ju and T . S. Rappaport, “Millimeter-wav e extended NYUSIM channel model for spatial consistency , ” in Proc. IEEE Global Commun. Conf . , Dec. 2018, pp. 1–6. [13] V . Degli-Esposti et al. , “Ray-tracing-based mm-wav e beamforming assessment, ” IEEE Access , vol. 2, pp. 1314–1325, 2014. [14] ITU-R P .2040, Effects of building materials and structures on radiowave pr opagation above about 100 MHz , Dec. 2013. [15] Y . Xing and T . S. Rappaport, “Propagation measurement system and approach at 140 GHz- moving to 6G and above 100 GHz, ” in Pr oc. IEEE Global Commun. Conf. , Dec. 2018, pp. 1–6.
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment