Fingerprint-based Localization using Commercial LTE Signals: A Field-Trial Study
Wireless localization for mobile device has attracted more and more interests by increasing the demand for location based services. Fingerprint-based localization is promising, especially in non-Line-of-Sight (NLoS) or rich scattering environments, such as urban areas and indoor scenarios. In this paper, we propose a novel fingerprint-based localization technique based on deep learning framework under commercial long term evolution (LTE) systems. Specifically, we develop a software defined user equipment to collect the real time channel state information (CSI) knowledge from LTE base stations and extract the intrinsic features among CSI observations. On top of that, we propose a time domain fusion approach to assemble multiple positioning estimations. Experimental results demonstrated that the proposed localization technique can significantly improve the localization accuracy and robustness, e.g. achieves Mean Distance Error (MDE) of 0.47 meters for indoor and of 19.9 meters for outdoor scenarios, respectively.
💡 Research Summary
The paper presents a novel fingerprint‑based positioning system that leverages real‑time Channel State Information (CSI) from commercial LTE networks and deep learning to achieve high‑accuracy indoor and outdoor localization. Traditional fingerprinting methods that rely on Received Signal Strength Indicator (RSSI) or Reference Signal Received Power (RSRP) suffer from large fluctuations in non‑Line‑of‑Sight (NLoS) environments, limiting their accuracy. In contrast, LTE CSI provides fine‑grained amplitude information across subcarriers and antenna ports, which can serve as a richer fingerprint. Because phase information is corrupted by hardware jitter, the authors restrict the fingerprint to the amplitude of the CSI.
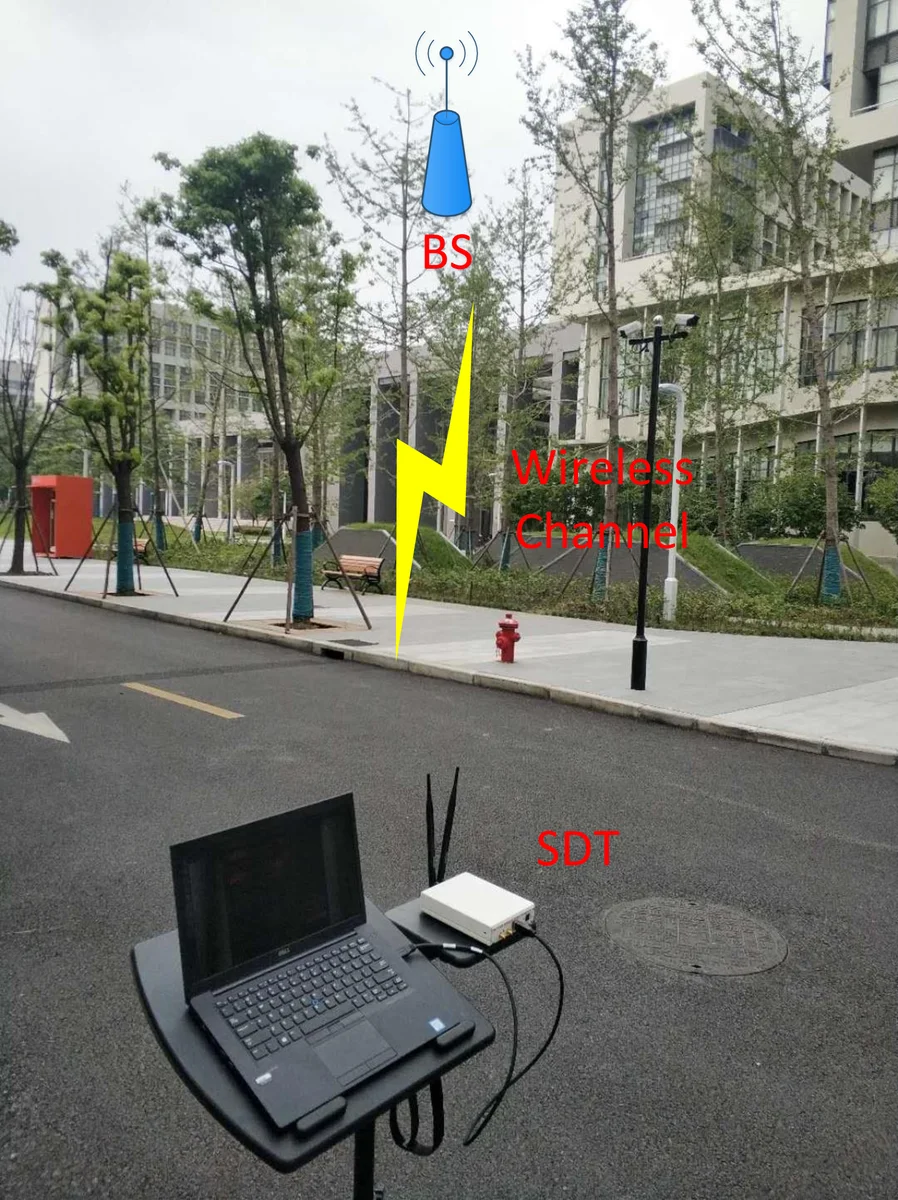
A software‑defined terminal (SDT) consisting of a laptop and a software‑defined radio is built to capture LTE downlink Cell‑Specific Reference Signals (CRS) and extract CSI. The system operates in an FDD LTE downlink, where each resource element corresponds to a 15 kHz subcarrier and a 66.7 µs OFDM symbol. CSI is collected over 25 resource blocks (RBs) and two transmit antennas, yielding a high‑dimensional matrix H(L,t) for each location L and time slot t. To manage the dimensionality and non‑linearity, the authors propose a two‑stage deep neural network architecture:
-
Slot‑based Localization Network (SLN) – a multilayer perceptron (MLP) that takes a single CSI snapshot (size 1 × 50) as input and outputs a probability distribution over M pre‑defined reference points (RPs). The network comprises four hidden layers (256‑100‑64‑48 neurons) with ReLU activations, dropout (0.3), and a softmax output. Training uses cross‑entropy loss. The estimated position for the snapshot is obtained by a weighted average of RP coordinates using the predicted probabilities.
-
Fusion Network (FN) – another MLP that receives a sequence of s=50 positions estimated by SLN from consecutive time slots, thereby capturing temporal correlation. FN consists of three hidden layers (256‑64‑12 neurons) with ReLU and a linear output layer. Training minimizes mean‑squared error (MSE) between the fused estimate and the ground‑truth location.
The overall mapping functions g₁ (SLN) and g₂ (FN) are learned jointly but sequentially: SLN models the instantaneous mapping from CSI to position, while FN refines the estimate by exploiting the time‑domain redundancy of CSI measurements.
Experimental evaluation is conducted in two environments:
-
Indoor scenario – a 3.6 m × 6 m room with 15 RPs spaced 1.2 m apart. CSI is collected from a commercial China Telecom eNodeB. The cumulative distribution function (CDF) of localization error shows that SLN alone improves over K‑Nearest Neighbor (KNN) but still exhibits large tail errors. Combining SLN with FN (SLN+FN) reduces the mean distance error (MDE) to 0.47 m and the maximum error to 1.15 m, roughly a three‑fold improvement over KNN.
-
Outdoor scenario – a 360 m × 195 m campus area with 105 RPs spaced 5 m apart. Here channel fluctuations are more severe, leading to higher absolute errors. Nevertheless, SLN+FN achieves an MDE of 19.9 m and a maximum error of 64.8 m, representing a 4–5× reduction compared with KNN.
Key contributions of the work are:
- Demonstrating that commercial LTE CSI can be harvested without network modification and used as a high‑resolution fingerprint.
- Introducing a deep‑learning pipeline (SLN + FN) that learns the highly nonlinear mapping from high‑dimensional CSI to physical coordinates, surpassing classical unsupervised methods such as KNN, WKNN, and SVM.
- Proposing a time‑domain fusion strategy that mitigates CSI’s intrinsic temporal variability, thereby enhancing robustness and reducing worst‑case errors.
The authors suggest future directions including extending the approach to multi‑antenna and wider bandwidth LTE/5G NR configurations, incorporating online adaptive learning for dynamic environments, and exploring millimeter‑wave CSI for sub‑meter accuracy. Overall, the study validates that LTE‑based fingerprinting, when combined with modern deep learning and temporal fusion, can provide reliable positioning for both indoor navigation and outdoor location‑based services without requiring additional infrastructure.
Comments & Academic Discussion
Loading comments...
Leave a Comment