Voluntary phantom hand and finger movements in transhumeral amputees could be used to naturally control polydigital prostheses
An arm amputation is extremely invalidating since many of our daily tasks require bi-manual and precise control of hand movements. Perfect hand prostheses should therefore offer a natural, intuitive and cognitively simple control over their numerous biomimetic active degrees of freedom. While efficient polydigital prostheses are commercially available, their control remains complex to master and offers limited possibilities, especially for high amputation levels. In this pilot study, we demonstrate the possibility for upper-arm amputees to intuitively control a polydigital hand prosthesis by using surface myoelectric activities of residual limb muscles (sEMG) associated with phantom limb movements, even if these residual arm muscles on which the phantom activity is measured were not naturally associated with hand movements before amputation. Using pattern recognition methods, three arm amputees were able, without training, to initiate 5-8 movements of a robotic hand (including individual finger movements) by simply mobilizing their phantom limb while the robotic hand was mimicking the action in real time. This innovative control approach could offer to numerous upper-limb amputees an access to recent biomimetic prostheses with multiple controllable joints, without requiring surgery or complex training; and might deeply change the way the phantom limb is apprehended by both patients and clinicians.
💡 Research Summary
This pilot study investigates whether transhumeral (upper‑arm) amputees can intuitively control a multi‑joint (polydigital) prosthetic hand by exploiting surface electromyographic (sEMG) activity that accompanies voluntary phantom‑limb movements. While commercially available prostheses such as the iLimb or Michelangelo provide multiple degrees of freedom, their control schemes are limited to a few switchable postures, making fine finger control especially difficult for high‑level amputations where few residual muscles are available. The authors hypothesized that the phenomenon of “mobile phantom limb” – the ability of many amputees to voluntarily move the sensation of their missing hand – generates consistent sEMG patterns even in muscles that were never involved in hand or finger actions before amputation.
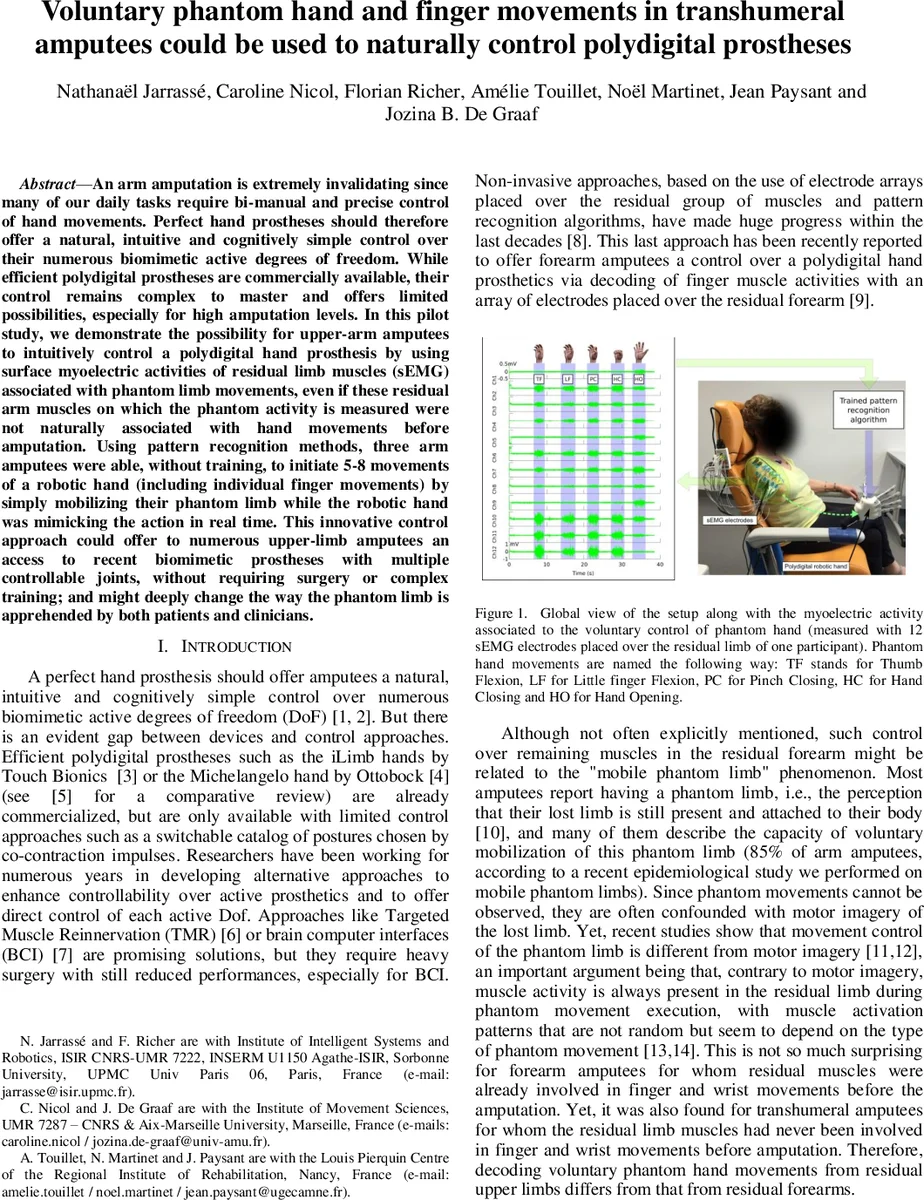
Three adult transhumeral amputees (ages 33, 62, and 77) were recruited. All participants reported a painless, mobile phantom limb capable of at least 20° of movement. Twelve bipolar sEMG electrodes (Ag/AgCl snap) were placed over the residual biceps, triceps, deltoid, and occasionally trapezius or pectoralis, according to each subject’s anatomy. Signals were sampled at 1 kHz, band‑pass filtered (10–400 Hz), and segmented into 512 ms windows with 128 ms overlap. For each channel, four autoregressive coefficients, root‑mean‑square (RMS), and sample entropy were extracted, yielding a 72‑dimensional feature vector per window. A linear discriminant analysis (LDA) classifier was trained online using the BCI2000 platform; only classifications with ≥90 % confidence triggered a command to a Prensilia IH2 Azzurra 5‑DoF robotic hand. Each recognized gesture caused a 5° incremental joint movement, effectively providing a velocity‑like control.
Two experimental protocols were employed. Test 1 presented the full set of phantom gestures each participant could perform (9–12 distinct movements, e.g., thumb flexion, little‑finger flexion, hand closing/opening). After a very brief training phase (two repetitions per gesture), participants performed pseudo‑random sequences while the system attempted real‑time classification and hand replication. Overall success rates across all gestures ranged from 57 % to 72 %, and each subject could reliably control 5–8 distinct hand postures. Test 2 reduced the gesture set to each participant’s “preferred” movements (4–6 gestures). This reduction markedly improved performance: participant 2 rose from 57 % to 92 % correct reproductions, and participant 3 from 63 % to 75 %. Confusion matrices revealed that while fine finger discrimination remained imperfect, the system consistently distinguished flexion/closure from extension/opening. Larger gesture catalogs increased inter‑class confusion, confirming the typical trade‑off between command richness and classification accuracy.
The study demonstrates that voluntary phantom‑hand movements generate distinguishable sEMG signatures even in muscles that never controlled the hand before amputation. Consequently, a non‑invasive, training‑free interface can be built on existing sEMG prosthetic platforms to achieve multi‑finger control without additional surgery such as Targeted Muscle Reinnervation. However, several limitations are evident: the small sample size, variability in residual muscle health (e.g., one subject’s brachial plexus injury limited biceps/triceps control), fatigue and practice effects influencing signal stability, and the coarse 5° joint step size used for control. Future work should explore larger cohorts, longer‑duration usage, more sophisticated classifiers (e.g., deep learning), higher‑resolution joint actuation, and integration into daily‑life prosthetic sockets.
In summary, the authors provide the first experimental evidence that transhumeral amputees can harness voluntary phantom‑limb movements to achieve intuitive, real‑time control of a polydigital prosthetic hand using conventional sEMG pattern‑recognition techniques. This approach promises a clinically accessible pathway to richer prosthetic functionality without the need for invasive procedures or extensive user training.
Comments & Academic Discussion
Loading comments...
Leave a Comment