Analytic signal in many dimensions
In this work we extend analytic signal theory to the multidimensional case when oscillations are observed in the $d$ orthogonal directions. First it is shown how to obtain separate phase-shifted components and how to combine them into instantaneous a…
Authors: Mikhail Tsitsvero, Pierre Borgnat, Paulo Gonc{c}alves
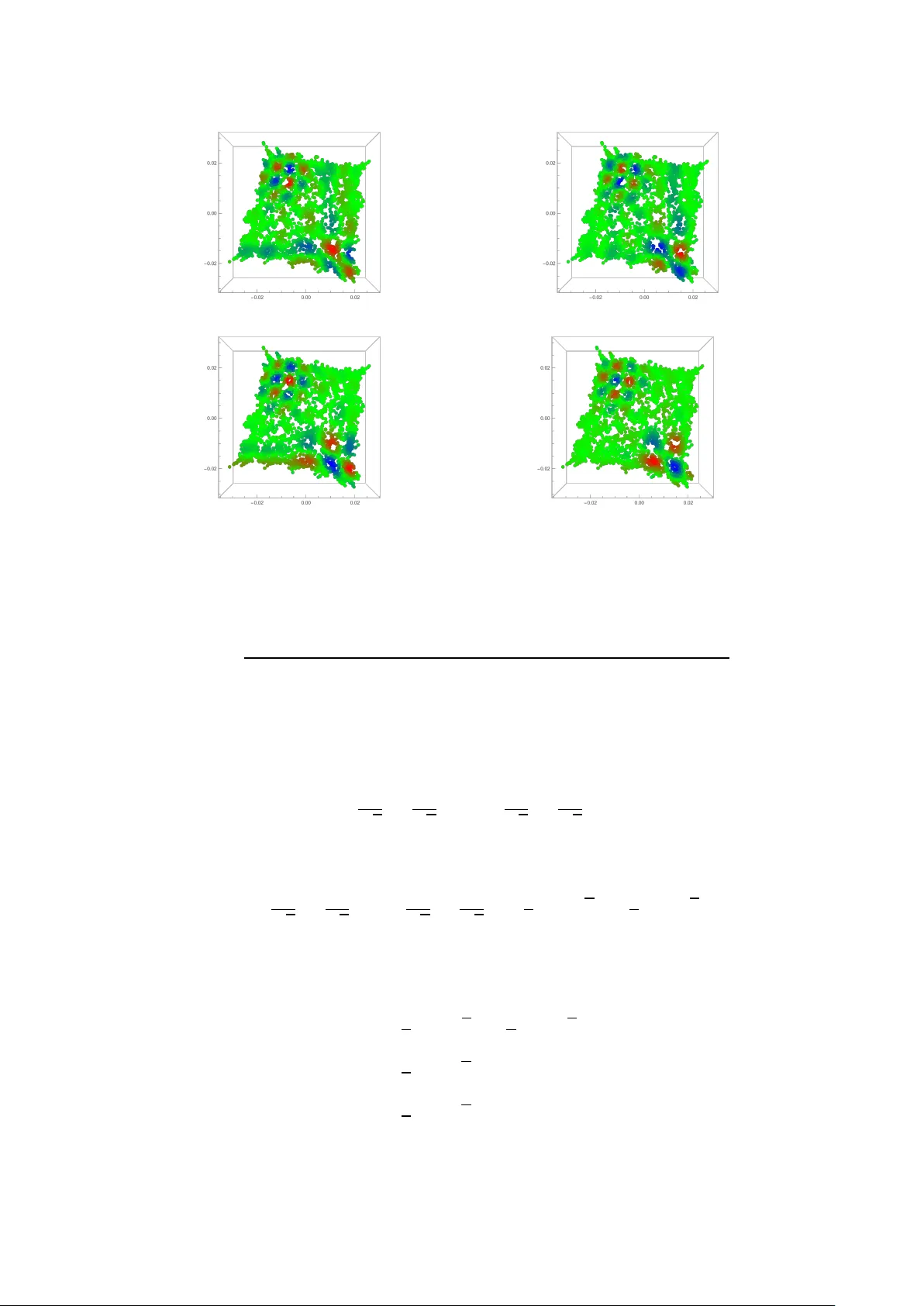
Analytic signal in many dimensions Mikhail Tsitsvero * , Pierre Borgnat and P aulo Gonçalves April 26, 2019 Abstract In this work we extend analytic signal theory to the multidimensional case when oscillations are observed in the d orthogonal directions . First it is shown how to obtain separate phase-shifted components and how to combine them into instantaneous amplitude and phases . Second, the proper hypercomplex analytic signal is defined as holomorphic hypercomplex function on the bound- ary of certain upper half-space. Next it is shown that correct phase-shifted components can be obtained by positive frequency restriction of hypercomplex F ourier transform. Necessary and sufficient conditions for analytic extension of the hypercomplex analytic signal into the upper hypercomplex half-space by means of holomorphic F ourier transform are given by the corresponding P aley-Wiener theorem. Moreover it is demonstrated that for d > 2 there is no corresponding non-commutative hypercomplex F ourier transform (includ- ing Clifford and Cayley-Dickson based) that allows to recover phase-shifted components correctly . 1 Introduction A N A LY T I C S I G N A L is a holomorphic/analytic complex-valued function defined on the boundary of upper complex half-plane. The boundary of upper half- plane coincides with R and therefore analytic signal is given by the map- ping f a : R → C . The problem of extending a complex-valued function defined on the boundary of a complex region was originally posed by Riemann and later by Hilbert [ Pandey , 2011 ]. In [ Hilbert, 1912 ] Hilbert introduced transformation that relates real and imaginary parts of analytic function on the boundary of an open disk/upper half-plane, that is now known as Hilbert transform, and is used to define analytic signal. As from the beginning of XX-th century the concepts of am- plitude and phase of a complex function became ubiquitous in quantum mechan- ics . Additionally in 1946 Gabor [ Gabor , 1946 ] proposed to use analytic signal to * This work w as supported by the LABEX MIL Y ON (ANR-10-LABX-0070) of Université de Lyon, within the program "Investissements d’Avenir" (ANR-11-IDEX- 0007) operated by the French Na- tional Research Agency (ANR). e-mail: tsitsvero@gmail.com 1 encode instantaneous amplitude and phase for communication signals. Analytic signal representation of oscillation processes is peculiar because it allows to de- fine the concepts of instantaneous amplitude, phase and frequency in unique and convenient way [ V akman and V ainshtein, 1977 ]. During the last few decades an interest emerged towards extension of analytic signal concept to multidimension- sional domains , mainly motivated by the problems coming from the fields ranging from image/video processing to multidimensional oscillating processes in physics like seismic, electromagnetic and gravitational w aves. In other words by all the domains that focus on oscillating processess in more than one spatial/temporal direction. Typically one is not able to fully describe oscillating process in several dimen- sions by using just complex numbers due to insufficient degrees of freedom of com- plex numbers . In this case one hopes to rely on algebraic constructions that extend ordinary complex numbers in a convenient manner . Such constructions are usu- ally referred to as hypercomplex numbers [ SKE, 2017 ]. While complex numbers allow to relate oscillations of the form f ( x ) = a ( x ) cos φ ( x ) (1.1) to the complex Euler form f a ( x ) = a ( x ) e i φ ( x ) , (1.2) the goal of this paper is to relate oscillations of the form f ( x 1 , . . . , x d ) = a ( x 1 , . . . , x d ) cos φ 1 ( x 1 ) cos φ 2 ( x 2 ) · . . . · cos φ d ( x d ) (1.3) to the corresponding hypercomplex Euler form f S ( x 1 , . . . , x d ) = a S ( x 1 , . . . , x d ) e e 1 φ 1 ( x 1 ) · e e 1 φ 2 ( x 2 ) · . . . · e e d φ d ( x d ) . (1.4) A number of works addressed various issues related to the proper choice of hypercomplex number system, definition of hypercomplex F ourier transform and partial Hilbert transforms for the sake of studying instantaneous amplitude and phases . Mainly these works were based on properties of various spaces such as C d , quaternions , Clifford algebras and Cayley-Dickson constructions. In the following we list just some of the works dedicated to the studies of analytic signal in many dimensions . T o the best of our knowledge, the first works on multidimensional analytic signal appeared in the early 1990-s including the work of Ell on hyper - complex transforms [ Ell, 1992 ], the work of Bülow [ Bülow and Sommer , 2001 ] and the work of F elsberg and Sommer on monogenic signals [ F elsberg and Sommer , 2001 ]. Since then there was a huge number of works that studied various aspects of hypercomplex signals and their properties . Studies of Clifford-F ourier trans- form and transforms based on Caley-Dickson construction applied to the multidi- mensional analytic signal method include [ Sangwine and Le Bihan, 2007 ], [ Hahn and Snopek, 2011 ], [ Le Bihan et al., 2014 ], [ Hahn and Snopek, 2013 ], [ Ell et al., 2014 ], [ Ell et al., 2014 ], [ Le Bihan and Sangwine, 2008 ], [ Bihan and Sangwine, 2010 ], [ Alfsmann et al., 2007 ]. P artial Hilbert transforms were studied by [ Bülow and Sommer , 2001 ], [ Y u et al., 2008 ], [ Zhang , 2014 ] and others . Recent studies 2 on Clifford-F ourier transform include [ Brackx et al., 2006 ], [ Maw ardi and Hitzer , 2006 ], [ De Bie et al., 2011 ], [ De Bie , 2012 ], [ De Bie et al., 2011 ], [ Ell and Sang- wine, 2007 ], [ Bahri et al., 2008 ], [ F elsberg et al., 2001 ] and many others . Mono- genic signal method w as recently studied and reviewed in the works [ Bernstein, 2014 ], [ Bridge, 2017 ] and others . Unfortunately we cannot provide the complete list of references, however we hope that reader can find all the relevant references for example in the review works [ Hahn and Snopek, 2016 ] and [ Bernstein et al., 2013 , Le Bihan, 2017 ]. The hypercomplex analytic signal f S is expected to extend all useful properties that we have in 1-D case. F irst of all one should be able to extract and general- ize instantaneous amplitude and phases to d dimensions. Second, we expect that hypercomplex F ourier transform of analytic signal will be supported only over a positive quadrant of hypercomplex space. Third, conjugated parts of complex an- alytic signal are related by Hilbert transform, so we can expect that conjugated components in hypercomplex space should be related also by some combination of Hilbert transforms. And finally it should be possible to extend hypercomplex analytic signal to some uniquely defined holomorphic function inside a region of hypercomplex space. W e address these issues in sequential order . First of all we start without any- thing that is hyper- or complex- by considering the F ourier integral formula and showing that Hilbert transform is related to the modified F ourier integral formula. This fact allows definition of instantaneous amplitude, phase and frequency with- out any reference to hypercomplex numbers and holomorphic functions . W e proceed by generalizing the modified F ourier integral formula to several dimensions and defining the phase-shifted components that can be combined into instantaneous amplitude and phases . Second, we address the question of existence of holomor - phic functions of several hypercomplex variables. It appears that commutative and associative hypercomplex algebra generated by the set of elliptic ( e 2 i = − 1) genera- tors is a suitable space for hypercomplex analytic signal to live in. W e refer to such a hypercomplex algebra as Scheffers space and denote it by S d . Hypercomplex an- alytic signal is defined as an extension of a hypercomlex holomorphic function of several hypercomplex variables to the boundary of certain upper half-space that is denoted by S d + . W e then observe the validity of Cauchy integral formula for functions S d + → S d , where the integral is calculated over tori-like hypersurfaces inside S d + and deduce the corresponding partial Hilbert transforms that relate hy- percomplex conjugated components . Finally it appears that hypercomplex F ourier transform of analytic signal with values in Scheffers space is supported only over non-negative frequencies , while one can use holomorphic F ourier transform for extension of analytic signal inside the upper half-space S d + . The paper is organised as follows . In Section 2 , we present general theory of analytic signal, establish modified F ourier integral formula and relate it to the Hilbert transform. In Section 3 , it is shown how to obtain phase-shifted compo- nents in several dimensions and combine them to define the instantaneous am- plitude, phases and frequencies. Then, in Section 4 we describe general theory of hypercomplex holomorphic functions of several hypercomplex variables and intro- duce Cauchy integral formula as well as Hilbert transform for polydisk and upper 3 half-space. Next, in Section 5 , we review the commutative hypercomplex F ourier transform and show that analytic signal can be reconstructed by positive frequency restriction of the hypercomplex F ourier transform of the original real-valued oscil- lating process. W e conclude the section by proving Bedrosian’s theorem for hy- percomplex analytic signal. In Section 6 , necessary and sufficient conditions for extension of analytic signal by means of holomorphic F ourier trasform are given by the P aley-Wiener theorem for functions with positively supported hypercom- plex F ourier transform. In Section 7 we prove that positive frequency restriction of the class of non-commutative hypercomplex F ourier transforms (including Clif- ford and Cayley-Dickson) does not provide correct phase-shifted components for d > 2. The paper is concluded by Section 8 where we provide several illustrative examples of amplitude computation as well as observe limitations of the approach in the case when oscillations are not aligned with the chosen orthogonal directions of the ambient space. 2 In one dimension Let us assume that we have some oscillating function f : R → R and we w ant to ob- tain its envelope function, that “forgets” its local oscillatory behavior , and instan- taneous phase , that shows how this oscillatory behavior evolves . In one dimension one gets analytic signal by combining the original signal with its phase-shifted ver - sion. The phase-shifted version is given by the Hilbert transform ˜ f of the original function f ˜ f = H [ f ] ( x ) = p.v . 1 π Z R f ( y ) x − y d y = lim ε → 0 1 π Z | x − y |> ε f ( y ) x − y d y , x ∈ R . (2.1) The analytic signal f a : R → C is obtained by combining f with ˜ f , i.e . f a = f + i ˜ f , where i 2 = − 1. This definition comes from the fact that analytic signal is extension of holomorphic (analytic) function in the upper half-plane C + to its boundary ∂ C + = R , i.e . f and ˜ f are harmonic conjugates on the boundary ∂ C + . Basic theory of Hilbert transform is concisely given in Appendix A . W e will need several standard definitions . Definition 2.1. The F ourier transform of a function f : R → C is defined as ˆ f ( ω ) = F [ f ] ( ω ) = Z R f ( x ) e − i ω x d x , f ( x ) = F − 1 £ ˆ f ¤ ( x ) = 1 2 π Z R ˆ f ( ω ) e i ω x d ω . (2.2) Definition 2.2. The sign function is defined as sign( x ) = − 1 if x < 0 , 0 if x = 0 , 1 if x > 0 . (2.3) 4 It turns out that F [ f a ]( ω ) is supported only on [0 , ∞ ) and therefore spectrum of f a does not have negative frequency components which frequently are redundant for applications . This is due to the following relation. Lemma 2.3. Suppose f : R → R is continuous and continuously differentiable, then F £ ˜ f ¤ ( ω ) = ∞ Z −∞ H [ f ]( x ) e − i ω x d x = − i sign( ω ) F [ f ]( ω ) (2.4) Combination of the function f and its Hilbert transform ˜ f provides all the necessary information about the envelope function, instantaneous phase and fre- quency . Definition 2.4 (Instantaneous amplitude, phase and frequency) . • The absolute value of complex valued analytic signal is called instantaneous amplitude or envelope a ( x ) a ( x ) = | f a ( x ) | = q f ( x ) 2 + ˜ f ( x ) 2 . (2.5) • The argument φ ( x ) of analytic signal f a ( x ) is called instantaneous phase φ ( x ) = arg[ f a ]( x ) = arctan µ ˜ f ( x ) f ( x ) ¶ . (2.6) • The instantaneous frequency ν ( x ) is defined as derivative of instantaneous phase ν ( x ) = d φ d x . (2.7) Remark 2.5. Analytic signal f a ( x ) could be defined in terms of F ourier transform, by discarding the negative frequency components ˆ f a ( ω ) = [ 1 + sign( ω ) ] ˆ f ( ω ) . (2.8) Quite complementary perspective on the relationship between f and ˜ f may be obtained by observing that H £ cos( ω x 0 + φ ) ¤ ( x ) = sin( ω x + φ ) . (2.9) Therefore we observe how Hilbert transform phase-shifts the cosine by π /2 turning it into sine. Next we give definitions of F ourier sine and cosine transforms that will appear useful in defining the phase-shifted components . Definition 2.6. The F ourier cosine and sine transforms of continuous and abso- lutely integrable f : R → R are defined by F c [ f ]( ω ) = ∞ Z −∞ f ( x ) cos( ω x ) d x , (2.10) F s [ f ]( ω ) = ∞ Z −∞ f ( x ) sin( ω x ) d x . (2.11) 5 In the following we will rely on the F ourier integral formula that follows di- rectly from the definition of F ourier transform. Lemma 2.7 (F ourier integral formula) . Any continuous and absolutely integrable on its domain f : R → R may be represented as f ( x ) = 1 π ∞ Z 0 ∞ Z −∞ f ( x 0 ) cos £ ( x − x 0 ) ω ¤ d x 0 d ω . (2.12) Proof. From the definition of F ourier transform we can write the decomposition f ( x ) = 1 2 π ∞ Z −∞ ∞ Z −∞ f ( x 0 ) e ( x − x 0 ) ω d x 0 d ω . (2.13) T aking the real part of both sides and observing that cosine is even in ω we arrive to the result. In the following theorem we deduce the modified F ourier integral formula and relate it to the Hilbert transform. Theorem 2.8. Let f : R → R be continuous and absolutely integrable and let H [ f ] be the Hilbert transform of f . T hen we have H [ f ]( x ) = 1 π ∞ Z 0 ∞ Z −∞ f ( x 0 ) sin £ ( x − x 0 ) ω ¤ d x 0 d ω . (2.14) Proof. Let us denote for convenience the left-hand side of ( 2.14 ) by ˜ f and right- hand side by f 1 . In the proof we treat the generalized function δ ( x ) as an infinitely localized measure or a Gaussian function in the limit of zero variance. Under this assumption, we can write the following cumulative distribution function H ( x ) = x Z −∞ δ ( s ) d s , (2.15) which is the Heaviside step function H ( ω ) = 1 2 (1 + sign( ω )), and, in particular , we have H (0) = 0 Z −∞ δ ( s ) d s = ∞ Z 0 δ ( s ) d s = 1 2 . (2.16) 6 Then we write the F ourier transform of the right hand side of ( 2.14 ) as F [ f 1 ]( ω 0 ) = 1 π ∞ Z −∞ ∞ Z 0 ∞ Z −∞ f ( x 0 ) sin £ ω ( x − x 0 ) ¤ d x 0 d ω e − i ω 0 x d x = 1 2 π i ∞ Z −∞ ∞ Z 0 ∞ Z −∞ f ( x 0 ) h e i ω ( x − x 0 ) − e − i ω ( x − x 0 ) i e − i ω 0 x d x 0 d ω d x = 1 2 π i ∞ Z −∞ ∞ Z 0 F [ f ]( ω ) e i ( ω − ω 0 ) x d ω d x − 1 2 π i ∞ Z −∞ ∞ Z 0 F [ f ]( − ω ) e i ( − ω − ω 0 ) x d ω d x = − i ∞ Z 0 F [ f ]( ω ) δ ( ω − ω 0 ) d ω + i ∞ Z 0 F [ f ]( − ω ) δ ( − ω − ω 0 ) d ω . (2.17) In the derivations above we used the relation ∞ R −∞ e i ( ω − ω 0 ) x d x = 2 πδ ( ω − ω 0 ). Now we see, by taking into account ( 2.16 ), that ∞ Z 0 F [ f ]( ω ) δ ( ω − ω 0 ) d ω = H ( ω 0 ) F [ f ]( ω 0 ) , ∞ Z 0 F [ f ]( − ω ) δ ( − ω − ω 0 ) d ω = H ( − ω 0 ) F [ f ]( ω 0 ) . (2.18) Finally , from the last line in ( 2.17 ) we observe that F [ f 1 ]( ω ) = − i F [ f ]( ω ) , if ω > 0 , − i 2 F [ f ]( ω ) + i 2 F [ f ]( − ω ) , if ω = 0 , i F [ f ]( ω ) , if ω < 0 , (2.19) which is exactly in accordance with ( 2.4 ) and therefore f 1 = ˜ f . Now by expanding sine of difference in the integrand of ( 2.14 ), we can write f 1 ( x ) = 1 π ∞ Z 0 ∞ Z −∞ f ( x 0 ) £ sin ( x ω ) cos ¡ x 0 ω ¢ − cos ( x ω ) sin ¡ x 0 ω ¢¤ d x 0 d ω = 1 π ∞ Z 0 ∞ Z −∞ f ( x 0 ) cos ¡ x 0 ω ¢ d x 0 sin ( x ω ) d ω − 1 π ∞ Z 0 ∞ Z −∞ f ( x 0 ) sin ¡ x 0 ω ¢ d x 0 cos ( x ω ) d ω . (2.20) 7 F or the sake of brevity we introduce the following notation α 0 = α 0 ( x , ω ) = cos ( ω x ) , α 1 = α 1 ( x , ω ) = sin ( ω x ) , α 0 = α 0 ( ω ) = ∞ Z −∞ f ( x 0 ) cos ¡ x 0 ω ¢ d x 0 α 1 = α 1 ( ω ) = ∞ Z −∞ f ( x 0 ) sin ¡ x 0 ω ¢ d x 0 , ˆ α 0 = ˆ α 0 ( x ) = 1 2 π ∞ Z −∞ ˆ f ( ω ) cos ( ω x ) d ω , ˆ α 1 = ˆ α 1 ( x ) = 1 2 π ∞ Z −∞ ˆ f ( ω ) sin ( ω x ) d ω . (2.21) F or the integration over ω of a pair of functions a ( ω ) and b ( x , ω ) we will write 〈 a , b 〉 + = 1 π ∞ Z 0 a ( ω ) b ( x , ω ) d ω , 〈 a , b 〉 = 1 2 π ∞ Z −∞ a ( ω ) b ( x , ω ) d ω . (2.22) Observation 2.9. Equipped with the notation introduced in ( 2.21 ) and ( 2.22 ) and using F ourier integral formula ( 2.12 ) we can expand f 0 = f ( x ) in the following form f 0 = α 0 , α 0 ® + + α 1 , α 1 ® + . (2.23) Similarly using the results of Theorem 2.8 we can write for f 1 = ˜ f f 1 = α 0 , α 1 ® + − α 1 , α 0 ® + . (2.24) Above observation shows that the original signal f is obtained by first project- ing f onto sine and cosine harmonics and then by reconstructing using the same harmonics correspondingly . Hilbert transform f 1 , or phase-shifted version of f , is obtained differently though. First we project initial function f on sine and cosine harmonics to obtain α 1 and α 0 , however then for reconstruction the phase-shifted harmonics are used, i.e. α 0 and α 1 . Observation 2.10. The F ourier transform of a general complex-valued function f : R → C , with f ( x ) = f 0 ( x ) + i f 1 ( x ), may be written in terms of projection on phase- shifted harmonics as ˆ f ( ω ) = F [ f ]( ω ) = α 0 ( ω ) − i α 1 ( ω ) , (2.25) which follows if we apply Euler’ s formula e i x = cos x + i sin x to the definition ( 2.2 ). The inverse transform may be written as F − 1 [ ˆ f ]( x ) = ˆ α 0 ( x ) + i ˆ α 1 ( x ) . (2.26) 8 The original function is recovered by f ( x ) = F − 1 £ ˆ f ¤ ( x ) = α 0 , α 0 ® + α 1 , α 1 ® + i ¡ α 0 , α 1 ® − α 1 , α 0 ®¢ . (2.27) A variety of approaches for generalization of the analytic signal method to many dimensions has been employed. F or example quaternionic-valued general- ization of analytic signal has been realized [ Bülow and Sommer , 2001 ] and works well in case d = 2. Later on, in the Example 7.4 , we show why and how the quater - nionic based approach is consistent with presented theory . As a next step we are going to generalize formulas ( 2.23 ) and ( 2.24 ) to multidimensional setting, first, without relying on any additional hypercomplex structure, while later in Sections 4 and 5 we choose a convenient hypercomplex algebra and F ourier transform. 3 In many dimensions In several dimensions we are puzzled with the same questions on what are the adequate definitions of instantaneous amplitude and phase. Again we start by considering some function f : R d → R having some local oscillatory behavior . W e start by extending the F ourier integral formula to many dimensions. F or convenience and brevity we introduce the following notation. F or a given binary { 0 , 1 } -vector j ∈ { 0 , 1 } d we define the functions α j : R d × R d → R by α j = α j ( x , ω ) = d Y l = 1 cos ³ ω l x l − j l π 2 ´ . (3.1) Theorem 3.1. Any continuous and absolutely integrable over its domain f : R → R may be decomposed as f ( x 1 , . . . , x d ) = 1 π d ∞ Z 0 ∞ Z −∞ · · · ∞ Z 0 ∞ Z −∞ f ( x 0 1 , x 0 2 , . . . , x 0 d ) cos £ ( x 1 − x 0 1 ) ω 1 ¤ · . . . · cos £ ( x d − x 0 d ) ω d ¤ d x 0 1 d ω 1 . . . d x 0 d d ω d . (3.2) or by employing the notation ( 3.1 ) , f ( x ) = 1 π d ∞ Z Z Z 0 ∞ Z Z Z −∞ f ( x 0 ) α 0 ¡ x − x 0 , ω ¢ d x 0 d ω (3.3) with 0 ∈ { 0 , 1 } d being the all-zeros vector . Proof. Proof is the same as for 1-D case. Similarly to the result of Theorem 2.8 next we define the phase-shifted copies of the oscillating function f . Definition 3.2. The phase-shifted version f j : R → R , in the direction j ∈ { 0 , 1 } d , of the function f : R → R is given by f j ( x ) = 1 π d ∞ Z Z Z 0 ∞ Z Z Z −∞ f ( x 0 ) α j ¡ x − x 0 , ω ¢ d x 0 d ω . (3.4) 9 Next we give the definitions of instantaneous amplitude, phase and frequency . Definition 3.3. • The square root of sum of all phase-shifted copies of signal is called instan- taneous amplitude or envelope a ( x ) a ( x ) = s X j ∈ { 0,1 } d f j ( x ) 2 . (3.5) • The instantaneous phase φ j ( x ) in the direction j ∈ { 0 , 1 } d is defined by φ j ( x ) = arctan µ f j ( x ) f ( x ) ¶ . (3.6) • The instantaneous frequency ν j ( x ) in the direction j ∈ { 0 , 1 } d is defined as partial derivatives of the corresponding instantaneous phase in the direc- tions given by j ν j ( x ) = ∂ j φ j = ∂ j 1 1 ◦ ∂ j 2 2 ◦ ... ◦ ∂ j d d ¡ φ j ¢ ( x ) , (3.7) where we used multi-index notation for derivatives, ∂ 1 i = ∂ ∂ x i and ∂ 0 i = id. Note that no Einstein summation convention was employed in ( 3.7 ). W e can generalize Theorem 2.8 by relating phase-shifts f j to the corresponding multidimensional Hilbert transforms. However first let us define Hilbert trans- form in several dimensions . Definition 3.4. The Hilbert transform in the direction j ∈ { 0 , 1 } d is defined by H j [ f ] ( x ) = p .v . 1 π | j | Z Z Z R | j | f ( y ) ( x − y ) j d y j , (3.8) where | j | gives the number of 1-s in j , ( x − y ) j = Q d i = 1 ( x i − y i ) j i and d y j = d y j 1 1 ... d y j d d , i.e. integration is performed only over the variables indicated by the vector j . Theorem 3.5. F or a continuous f : R → R that is absolutely integrable in its do- main, we have f j = H j [ f ] . (3.9) Proof. proof follows the lines of the proof of Theorem 2.8 . It is useful to express the phase-shifted functions f j as a combination of har - monics α j and corresponding projection coefficients α i . W e define projection coef- ficients similarly to ( 2.21 ), α j = α j ( ω ) = ∞ Z Z Z −∞ f ( x ) α j ( x , ω ) d x , ˆ α j = ˆ α j ( x ) = 1 (2 π ) d ∞ Z Z Z −∞ ˆ f ( ω ) α j ( x , ω ) d ω , ˆ α j + = ˆ α j + ( x ) = 1 π d ∞ Z Z Z 0 ˆ f ( ω ) α j ( x , ω ) d ω (3.10) 10 and brackets , similarly to ( 2.22 ), as 〈 a , b 〉 + = 〈 a , b 〉 + ( x ) = 1 π d ∞ Z Z Z 0 a ( ω ) b ( x , ω ) d ω , 〈 a , b 〉 = 〈 a , b 〉 ( x ) = 1 (2 π ) d ∞ Z Z Z −∞ a ( ω ) b ( x , ω ) d ω , (3.11) for any two functions a ( ω ) = a ( ω 1 , . . . , ω d ) and b ( x , ω ) = b ( x 1 , . . . , x d , ω 1 , . . . , ω d ). It is useful to observe how phase-shifted functions f j could be obtained from α j . Theorem 3.6. F or a given function f : R d → R , one obtains phase-shifted copy f j , in the direction j ∈ { 0 , 1 } d , by f j = X i ∈ { 0,1 } d ( − 1) | ( i ⊕ j ) ª i | D α i ⊕ j , α i E + , (3.12) where ⊕ is a binary exclusive OR operation acting elementwise on its arguments and ª is defined as following: 1 ª 0 = 1 and the result is 0 otherwise . Proof. The proof follows immediately after we expand all the cosines and sines of difference in ( 3.4 ) and make all the substitutions from ( 3.1 ) and ( 3.10 ). Example 3.7. Short illustration may be helpful to understand the rule ( 3.12 ). Let us suppose that we have j = (1 , 0 , 1 , 1 , 0) and i = (1 , 1 , 0 , 0 , 0). In this case i ⊕ j = (1 ⊕ 1 , 0 ⊕ 1 , 1 ⊕ 0 , 1 ⊕ 0 , 0 ⊕ 0) = (0 , 1 , 1 , 1 , 0). Then we have ( i ⊕ j ) ª i = (0 ª 1 , 1 ª 1 , 1 ª 0 , 1 ª 0 , 0 ª 0) = (0 , 0 , 1 , 1 , 0) therefore we will ha ve “ + ” sign in front of α 01110 , α 11000 ® + for f 10110 . Remark 3.8. Before moving to the theory of hypercomplex holomorphic functions and analytic signals, it will be useful to note that from the definition ( 3.4 ) there will be in total 2 d different components f j . It says us that most likely the dimen- sionality of hypercomplex algebra in which analytic signal should take its values should be also 2 d . 4 Holomorphic functions of several variables 4.1 Commutative hypercomplex algebra The development of hypercomplex algebraic systems started with the works of Gauss , Hamilton [ Hamilton, 1844 ], Clifford [ Clifford, 1871 ], Cockle [ Cockle, 1849 ] and many others . Generally a hypercomplex variable w is given by the linear combination of n hypercomplex units { e i } w = n X i = 0 w i e i , (4.1) 11 with coefficients w i ∈ R . Product rule for the units e i is given by the structure coefficients γ s i j ∈ R e i e j = n X s = 0 γ s i j e s . (4.2) Only algebras with unital element or module are of interest to us, i.e. those having element ² = 1 such that ² x = x ² = x . The unital element have expansion ² = n X i = 0 ² i e i . (4.3) F or simplicity we will always assume that the unital element ² = e 0 = 1. The units e i , i 6= 0, could be subdivided into three groups [ Catoni et al., 2008 ]. 1. e i is elliptic unit if e 2 i = − e 0 2. e i is parabolic unit if e 2 i = 0 3. e i is hyperbolic unit if e 2 i = e 0 . Example 4.1. General properties of some abstract hypercomplex algebra S that is defined by its structure constants γ s i j may be quite complicated. W e will focus mainly on the commutative and associative algebras constructed from the set of elliptic-type generators . F or example suppose we ha ve two elliptic generators e 2 1 = − 1 and e 2 = − 1, then one can construct the simplest associative and commutative elliptic algebra as S 2 = span R { e 0 ≡ 1 , e 1 , e 2 , e 3 ≡ e 1 e 2 } . The algebra have 2 2 = 4 units . F or S 2 we have the following multiplication table e 0 e 1 e 2 e 3 e 1 − e 0 e 3 − e 2 e 2 e 3 − e 0 − e 1 e 3 − e 2 − e 1 e 0 T able 1: Multiplication table for S 2 algebra One could assemble various types of hypercomplex algebras depending on the problem. All of the above unit systems have their own applications . F or exam- ple, numbers with elliptic unit relate group of rotations and translations of 2- dimensional Euclidean space to the complex numbers along with their central role in harmonic analysis. Algebra with parabolic units may represent Galileo’s trans- formations , while algebra with hyperbolic units could be used to represent Lorentz group in special relativity [ Catoni et al., 2008 ]. In this work we mainly focus on the concepts of instantaneous amplitude, phase and frequency of some oscillating process . Elliptic units are of great interest to those studying oscillating phenom- ena due to the famous Euler’s formula. W e briefly remind how it comes. T aylor series of exponential is given by e z = 1 + z 1! + z 2 2! + z 3 3! + · · · = ∞ X n = 0 z n n ! . (4.4) 12 W e could have various Euler’ s formulae . In elliptic case when z = e i x , e 2 i = − 1, we can write from the above T aylor’s expansion e e i x = cos( x ) + e i sin( x ) . (4.5) When e 2 i = 0 we have e e i x = 1 + e i x . (4.6) And finally when e 2 i = 1 we get e e i x = cosh( x ) + e i sinh( x ) . (4.7) It is due to the relation ( 4.5 ) that one relies on the complex exponentials for anal- ysis of oscillating processes. One may well expect that to obtain amplitude and phase information, one will need a F ourier transform based on the algebra con- taining some elliptic numbers . It was a question whether the chosen hypercomplex algebra for multidimen- sional analytic signal should be commutative, anticommutative, associative or nei- ther . Whether it is allowed to have zero divisors or not. In Section 7 we show that commutative and associative algebra not only suffices but also is essentially a nec- essary condition to define F ourier transform coherently with ( 3.12 ). Based on these general considerations we define the simplest associative and commutative alge- bra for a set of d elliptic units . W e call it elliptic Sc heffers 1 algebra and denote it by S d . Definition 4.2. The elliptic Scheffers algebra S d over a field R is an algebra of dimension 2 d with unit ² = e 0 = 1 and generators { e 1 , . . . , e d } satisfying the condi- tions e 2 i = − 1 , e i e j = e j e i , i , j = 1 , . . . , d . The basis of the algebra S d consists of the elements of the form e 0 = 1 , e β = e β 1 e β 2 . . . e β d , β = ¡ β 1 , . . . , β s ¢ , β 1 < β 2 < · · · < β s , 1 ≤ s ≤ d . Each element w ∈ S d has the form w = 2 d − 1 X β = 0 w β e β = w 0 ² + d X s = 1 X β 1 <···< β s w β e β , w β ∈ R . (4.8) If otherwise not stated explicitly we will consider mainly algebras over R . T o illus- trate the definition above we can write any w ∈ S 2 in the form w = w 0 + w 1 e 1 + w 2 e 2 + w 12 e 1 e 2 . (4.9) Remark 4.3. W e will use three different notations for indices of hypercomplex units and their coefficients. The dimension of Scheffers algebra S d is 2 d therefore there always will be 2 d indices . However one can choose how to label them. F irst notation is given by natural numbering of hypercomplex units . F or example for S 2 we will have the following generators { e 0 ≡ 1 , e 1 , e 2 , e 3 ≡ e 1 e 2 } . Second nota- tion is given by the set of indices in subscript, i.e . for S 2 we have the generators { e 0 ≡ 1 , e 1 , e 2 , e 1,2 } . Third notation uses binary representation j ∈ { 0 , 1 } d . F or S 2 example generators will be labeled as { e 00 ≡ 1 , e 10 , e 01 , e 11 } . T o map between natu- rally ordered and binary representations we use index function ind( · ), for example 1 Due to the work [ Scheffers , 1893 ] of G. W . Scheffers (1866-1945) 13 in case of S 2 we have ind(11) = { 1 , 2 } = 3 as well as we have ind(3) = 11 ∈ { 0 , 1 } 2 or ind(1 , 2) = 3 ∈ [0 , 1 , ..., 2 d − 1]. Even though the function ind( · ) is overloaded, in practice it is clear how to apply it. Remark 4.4. The space S d is a Banach space with norm of w ∈ S d defined by | w | S d = v u u t 2 d − 1 X β = 0 | w β | 2 , w β ∈ R , (4.10) while sometimes we will write just | w | instead of | w | S d . One can check that S d is a unital commutative ring. The main difference of the elliptic Scheffers algebra from the algebra of complex numbers is that factor law does not hold in general, i.e. if we have vanishing product of some non zero a , b ∈ S d , it does not necessarily follow that either a or b vanish. In case a b = 0 , a , b 6= 0, a and b are called zero divisors. Zero divisors are not invertible . However what is of actual importance for us is that S d has subspaces spanned by elements { e 0 , e i } , each of which has the structure of the field of complex numbers and therefore factor la w holds inside these subspaces. W e will need this result to define properly the Cauchy integral formula later [ P edersen, 1997 ]. Definition 4.5. The space S ( i ) , i = 1 , ..., d , is defined by S ( i ) = { a + b e i | a , b ∈ R } . (4.11) Real and imaginary parts of an element ζ = a + b e i are defined in an obvious wa y by ℜ ( ζ ) = a and ℑ ( ζ ) = b , while norm of ζ is given by | ζ | S ( i ) = p a 2 + b 2 . Similarly to the complex analysis of several variables we define open disk, pol ydisk and upper/lower half-planes . Definition 4.6. The unit disk D ( i ) ⊂ S ( i ) of radius 1 centered at zero is defined as D ( i ) = { x ∈ S ( i ) : | x | < 1 } . (4.12) Sometimes we will write D ( w i , r ) for a disk of radius r centered at w i ∈ S ( i ). Definition 4.7. The upper half-plane S + ( i ) is given by S + ( i ) = { a + b e i | a , b ∈ R ; b > 0 } , (4.13) while the lower half-plane will be denoted by S − ( i ) S − ( i ) = { a + b e i | a , b ∈ R ; b < 0 } . (4.14) Finally we combine these spaces to construct the domain for hypercomplex functions of several variables . Definition 4.8. The total Scheffers space S d is a direct sum of d subalgebras S ( i ) S d = d M i = 1 S ( i ) . (4.15) 14 Definition 4.9. The upper Scheffers space S d + is a direct sum of d subalgebras S + ( i ) S d + = d M i = 1 S + ( i ) . (4.16) Definition 4.10. The mixed Scheffer s space , denoted by S + j , is the direct sum of upper spaces marked by 1-s in a vector j ∈ { 0 , 1 } d and lower spaces marked by 0-s S + j = à M i : j i = 1 S + ( i ) ! ⊕ à M i : j i = 0 S − ( i ) ! . (4.17) Remark 4.11. The space S d is a Banach space with norm of a vector v ∈ S d , v = ( v 1 , . . . , v d ) , each v i ∈ S ( i ), given by | v | S d = r X i | v i | 2 S ( i ) , v i ∈ S ( i ) . (4.18) Sometimes we will write for simplicity | v | instead of | v | S d . Definition 4.12. F or j ∈ { 0 , 1 } d we define j -polydisk D j ⊂ S d as a product of | j | disks D ( i ) D j = Y i ∈ ind( j ) D ( i ) (4.19) and we will write for d -polydisk D d = Q d i = 1 D ( i ) when we take product of all d disks . Sometimes we will use polydisk of radius r centered at vector w ∈ S d which is denoted by D j ( w , r ) = Q i ∈ ind( j ) D ( w i , r ). Observation 4.13. The boundary of S d + coincides with R d , i.e. ∂ S d + = S d + \ S d + ' R d . (4.20) While each S ( i ) is equivalent to the complex plane C , the combination S ( i ) ⊕ S ( j ) is not equivalent to C 2 because imaginary units have different labels – in a sense S ( i ) ⊕ S ( j ) contains more information than C 2 . 4.2 Holomorphic functions of hypercomplex variable The scope of this section is to define hypercomplex holomorphic/analytic functions of type f : S d → S d . Indeed we are interested in rather restricted case of mappings between hypercomplex spaces which finally will be consistent with our definition of analytic signal as a function on the boundary of the polydisc in S d in full corre- spondence with 1-dimensional analytic signal. There are some similarities and dif- ferences with theory of functions of several complex variables . W e refer the reader to the book [ Krantz, 2001 ] for details on the function theory of several complex variables and to the concise review [ Gong and Gong, 2007 ] to refresh in memory basic facts on complex analysis . W e start by providing several equivalent defini- tions of a holomorphic function of a complex variable by following Krantz [ Krantz, 2001 ]. Then we define holomorphic function of several hypercomplex variables in a pretty similar fashion. Starting from the very basics will be instructive for the hypercomplex case. 15 Definition 4.14. The derivative of a complex-valued function f : C → C is defined as a limit ∂ f ∂ z ( z 0 ) = lim z → z 0 f ( z ) − f ( z 0 ) z − z 0 . (4.21) If the limit exists one says that f is complex differentiable at point z 0 . Definition 4.15. If f : Ω → C , defined on some open subset Ω ⊆ C , is complex differentiable at every point z 0 ∈ Ω , then f is called holomorphic on Ω . Complex differentiability means that the derivative at a point does not depend on the wa y sequence approaches the point. If one writes two limits , one approach- ing in the direction parallel to the real axis and one parallel to the imaginary axis , then after equating the corresponding real and imaginary terms one obtains the Cauchy-Riemann equations and therefore equivalent definition of a holomorphic function. Definition 4.16. A function f : Ω → C , explicitly written as a combination of two real-valued functions u and v as f ( x + i y ) = u ( x , y ) + i v ( x , y ), is called holomorphic in some open domain Ω ⊆ C if u and v satisfy the Cauchy-Riemann equations ∂ u ∂ x = ∂ v ∂ y , ∂ u ∂ y = − ∂ v ∂ x . (4.22) A holomorphic function of a complex variable z ∈ C can be compactly introduced using the derivatives with respect to z and conjugated variable ¯ z ∂ ∂ z = 1 2 µ ∂ ∂ x − i ∂ ∂ y ¶ , ∂ ∂ ¯ z = 1 2 µ ∂ ∂ x + i ∂ ∂ y ¶ . (4.23) Definition 4.17. A function f : Ω → C is called holomorphic in some open domain Ω ∈ C if for each z ∈ Ω ∂ f ∂ ¯ z = 0 , (4.24) which means that holomorphic function is a proper function of a single complex variable z and not of the conjugated variable ¯ z . Contour integration in the complex space is yet another viewpoint on the holo- morphic functions. Complex integration pla ys the central role in our work due to our interest in Hilbert transform that is defined as a limiting case of contour integral over the boundary of an open disk (see Appendix A ). Definition 4.18. A continuous function f : Ω → C is called holomorphic if for each ω ∈ Ω there is an r = r ( w ) > 0 such that D ( w , r ) ⊆ Ω and f ( z ) = 1 2 π i I | ζ − w |= r f ( ζ ) ζ − z d ζ (4.25) for all z ∈ D ( w , r ). 16 Remark 4.19. Structure of C as a field is important for the definition of the inte- gral in ( 4.25 ). Only because every element of a field has a multiplicative inverse, we can write the integration of the kernel 1 z . However in imaginary situation when the contour of integration passes through some points where ( ζ − z ) is not invert- ible, we will be unable to write the Cauc hy formula ( 4.25 ). Finally we can justify the word “analytic” in the title of the paper by giving the following definition. Note that analytic and holomorphic means essentially the same. Definition 4.20. A function f : Ω → C is called anal ytic (holomorphic) in some open domain Ω ∈ C if for each z 0 ∈ Ω there is an r = r ( z 0 ) > 0 such that D ( z 0 , r ) ⊆ Ω and f can be written as an absolutely and uniformly convergent power series f ( z ) = X k a k ( z − z 0 ) k (4.26) for all z ∈ D ( z 0 , r ) . Having introduced basic notions of holomorphic functions now we are ready to review the holomorphic function theory in the hypercomplex space. Theory of holo- morphic functions was generalized to the functions of commutative hypercomplex variables by G .W . Scheffers in 1893 [ Scheffers, 1893 ], then his work was extended in 1928 by P .W . K etchum [ Ketchum, 1928 ] and later by V .S . Vladimirov and I.V . V olovich [ Vladimirov and V olovich, 1984a ], [ Vladimirov and V olovich, 1984b ] to the theory of superdifferentiable functions in superspace with commuting and anti- commuting parts. One important distinction to previous works is that we present different Cauchy formula from one given by K etchum and Vladimirov . Their ap- proach is based on complexification (i.e. w β ∈ C ) of the underlying hypercomplex algebra, while we are working in the hypercomplex algebra over reals . W e briefly describe their formula in Appendix B . Let us recall, ha ving in mind Remarks 4.4 and 4.11 , the definition of continuity for a function f : A → S d defined on some open subset A ⊆ S d . W e say the limit of f as ζ approaches ζ 0 equals a , denoted by lim ζ → ζ 0 = a if for all ε > 0 there exists a δ > 0 such that if ζ ∈ A and | ζ − ζ 0 | < δ then | f ( ζ ) − a | < ε . Then f is said to be continuous at ζ 0 if lim ζ → ζ 0 = f ( ζ 0 ). If f is continuous for every point ζ 0 ∈ A then f is said to be continuous on A . First by following [ Scheffers, 1893 ] we give definition of a holomorphic function in some general hypercomplex space Γ that is defined by its structure constants γ s i k , see ( 4.2 ). This definition generalizes ordinary Cauchy-Riemann equations and follows from the same argument that hypercomplex derivative at a point should be independent on the w ay one approaches the point in a hypercomplex space. Finally we will restrict attention to the functions S d → S d and will see that we are consistent with our previous derivations . Definition 4.21 ([ Scheffers, 1893 ]) . A function f : Γ → Γ , w 7→ f ( w ) is holomorphic in an open domain Ω ⊆ Γ if for each point w ∈ Ω it satisfies the generalized Cauchy- Riemann-Scheffers equations ∂ f s ∂ w k = n X i = 0 γ s i k ∂ f i ∂ w 0 , s , k = 0 , . . . , n . (4.27) 17 General equations could be simplified if we consider the functions that have only subsets of Γ = S d as their domain, in our case we consider functions f : S ( i ) → S d that map plane S ( i ) in S d to the total space S d . If we restrict our domain only to the plane S ( i ) and insert values of structure constants for S d we obtain simple Cauchy-Riemann equations (see for example eqq. ( 4.32 ) and ( 4.33 ) for 2-D case). W e will arrive to the explicit equations in a while . Mappings from restricted domains , i.e. in our case S ( i ) ⊆ S d , are described in details in [ Ketchum, 1928 ]. Remark 4.22. T o avoid confusion the comment on the relationship between the spaces S ( i ), S d and S d will be useful. While we can embed trivially S ( i ) , → S d as well as S ( i ) , → S d , one may tend to think that it will also be natural to embed S d , → S d . Last embedding alw ays exists because dimensionality of S d is 2 d and is non smaller that the dimensionality of S d which is 2 d . However this embedding will not be trivial. F or example consider an element x ∈ R d ⊆ S d . In S d there is only one unital element, while in S d there are d of them, because S d = L d i = 1 S ( i ), therefore it is impossible to “match“ the unital elements of S d and S d in a trivial wa y . Therefore it is better to think about S d and S d as being two different spaces that however “share” planes S ( i ). From now on we will study the functions f : S d → S d . A function f could be explicitly expressed as a function of several hypercomplex variables f ( z 1 , ..., z d ) ≡ f ( x 1 + e 1 y 1 , ..., x d + e d y d ) with each z k ∈ S ( k ). Definition 4.23. A function f : S d → S d is called hypercomplex differentiable in the variable z k if the following limit exists ∂ f ∂ z k ( z 1 , ..., z 0 , ..., z d ) = lim z → z 0 f ( z 1 , ..., z , ..., z d ) − f ( z 1 , ..., z 0 , ..., z d ) z − z 0 . (4.28) Definition 4.24. If f : Ω → S d , defined on some open subset Ω ⊆ S d , is hyper- complex differentiable in each variable separately at every point z 0 ∈ Ω , then f is called holomorphic on Ω . One obtains the generalized Cauchy-Riemann equations using the same argu- ment as in complex analysis . W e give an example for a function f : S 2 → S 2 , which is easy to generalize for any d > 2. Example 4.25. Let us consider a function f : S 2 → S 2 . It depends on 4 real vari- ables ( x 1 , y 1 , x 2 , y 2 ) because f ( z 1 , z 2 ) ≡ f ( x 1 + e 1 y 1 , x 2 + e 2 y 2 ). Moreover in S 2 we can expand the value of f componentwise f ( z 1 , z 2 ) ≡ f ( x 1 + e 1 y 1 , x 2 + e 2 y 2 ) = f 0 ( x 1 + e 1 y 1 , x 2 + e 2 y 2 ) + e 1 f 1 ( x 1 + e 1 y 1 , x 2 + e 2 y 2 ) + e 2 f 2 ( x 1 + e 1 y 1 , x 2 + e 2 y 2 ) + e 1 e 2 f 12 ( x 1 + e 1 y 1 , x 2 + e 2 y 2 ) . (4.29) First we calculate the derivative in the “real” direction of the plane S (1) as lim ∆ x → 0 f ( x 1 + ∆ x + e 1 y 1 , z 2 ) − f ( z 1 , z 2 ) ∆ x = ∂ f 0 ∂ x 1 + e 1 ∂ f 1 ∂ x 1 + e 2 ∂ f 2 ∂ x 1 + e 1 e 2 ∂ f 12 ∂ x 1 . (4.30) 18 Then calculate the derivative in the orthogonal direction e 1 , note that 1/ e 1 = e 1 / e 2 1 = − e 1 , lim ∆ y → 0 f ( x 1 + e 1 y 1 + e 1 ∆ y , z 2 ) − f ( z 1 , z 2 ) e 1 ∆ y = − e 1 ∂ f 0 ∂ y 1 + ∂ f 1 ∂ y 1 − e 1 e 2 ∂ f 2 ∂ y 1 + e 2 ∂ f 12 ∂ y 1 . (4.31) Equating the corresponding components gives us the Cauchy-Riemann equa- tions for the variable z 1 ∂ f 0 ∂ x 1 = ∂ f 1 ∂ y 1 , ∂ f 1 ∂ x 1 = − ∂ f 0 ∂ y 1 , ∂ f 2 ∂ x 1 = ∂ f 12 ∂ y 1 , ∂ f 12 ∂ x 1 = − ∂ f 2 ∂ y 1 . (4.32) Similarly we get 4 equations for z 2 ∂ f 0 ∂ x 2 = ∂ f 1 ∂ y 2 , ∂ f 1 ∂ x 2 = − ∂ f 0 ∂ y 2 , ∂ f 2 ∂ x 2 = ∂ f 12 ∂ y 2 , ∂ f 12 ∂ x 2 = − ∂ f 2 ∂ y 2 . (4.33) These 8 equations provide necessary and sufficient conditions for a function f ( z 1 , z 2 ) to be holomorphic. It comes immediately after one observes that all three available directions e 0 , e 1 , e 2 are mutually orthogonal in the Euclidean representation of S 2 and by linearity of the derivative operator . Let us now express the conditions on holomorphic function using the derivative with respect to conjugated variable, where the conjugation of z j = a + e j b is defined by ¯ z j = a − e j b , j = 1 , ..., d . Derivative operators are defined similar to ( 4.23 ) by ∂ ∂ z j = 1 2 µ ∂ ∂ x j − e j ∂ ∂ y j ¶ , ∂ ∂ ¯ z j = 1 2 µ ∂ ∂ x j + e j ∂ ∂ y j ¶ . (4.34) Definition 4.26. A function f : Ω → S d , defined on some open subset Ω ⊆ S d , is holomorphic on Ω if ∂ f ∂ ¯ z j = 0 , for j = 1 , ..., d , (4.35) at every point z 0 ∈ Ω . 19 Again we give an example for f : S 2 → S 2 . Example 4.27. The derivative with respect to ¯ z 1 of f : S 2 → S 2 is given by ∂ f ∂ ¯ z 1 = 1 2 µ ∂ f ∂ x 1 + e 1 ∂ f ∂ y 1 ¶ = 1 2 µ ∂ f 0 ∂ x 1 + e 1 ∂ f 1 ∂ x 1 + e 2 ∂ f 2 ∂ x 1 + e 1 e 2 ∂ f 12 ∂ x 1 + e 1 ∂ f 0 ∂ y 1 − ∂ f 1 ∂ y 1 + e 1 e 2 ∂ f 2 ∂ y 1 − e 2 ∂ f 12 ∂ y 1 ¶ . (4.36) Equating the components in front of each e i to zero we get equations ( 4.32 ). W e are ready to introduce the Cauchy integral formula for the functions f : S d → S d . The concept of Riemann contour integration as well as Cauchy’ s integral theorem are well defined in the unital real, commutative and associative algebras [ P edersen, 1997 ]. Some care will be taken to define Cauchy integral formula be- cause some elements of S d are not invertible. T o introduce the concept of integral in the space S d it is natural to assume (cf . ( 4.8 )) that d w = 2 d − 1 X β = 0 e β d w β . (4.37) Therefore we understand the integral R f ( w ) d w of S d -valued function f ( w ) of the variable w ∈ S d as integral of differential form P β f ( w ) e β d w β along a curve in R 2 d . As it was pointed out in the Remark 4.19 , presence of the inverse function in Cauchy formula implies that inverse of the function ( z − ζ ) does not pass through zero divisors in S d . It is true that S d contains some zero divisors. F or example ( e 1 − e 2 )( e 1 + e 2 ) = 0. However if we restrict our attention to the functions S ( i ) → S d then it is easy to see that each nonzero z ∈ S ( i ) , i = 1 , ..., d is invertible simply because each S ( i ) is a field. Cauchy formula for f : S ( i ) → S d for a disk D ( i ) ⊂ S ( i ) will have the form 1 2 π e i Z ∂ D ( i ) f ( ζ ) ζ − z d ζ i = ( f ( z ) if z ∈ D ( i ) , 0 if z ∈ S ( i ) \ D ( i ) . (4.38) Therefore we can also construct the multidimensional Cauchy integral formula for holomorphic functions f : S d → S d without any problems . General Cauchy formula for a simple open polydisk D j ⊂ S d is thus given by 1 (2 π ) | j | e j Z Z Z ∂ D j f ¡ ζ j ¢ ( ζ − z ) j d ζ j = ( f ( z ) if z ∈ D j , 0 if z ∈ S d \ D j . (4.39) This motivates the following equivalent definition of a holomorphic function. Definition 4.28. Let function f : Ω → S d , defined on some open subset Ω ⊆ S d , be continuous in each variable separately and locally bounded. The function f is said to be holomorphic in Ω if for each w ∈ Ω there is an r = r ( w ) > 0 such that D d ( w , r ) ⊆ Ω and f ( z 1 , ..., z d ) = 1 ( 2 π ) d e 1 · . . . · e d I | ζ 1 − w 1 |= r · · · I | ζ d − w d |= r f ( ζ 1 , . . . , ζ d ) ( ζ 1 − z 1 ) · . . . · ( ζ d − z d ) d ζ 1 . . . d ζ d (4.40) for all z ∈ D d ( w , r ). 20 Analytic hypercomplex function therefore will be defined as following . Definition 4.29. A function f : Ω → S d is called analytic (holomorphic) in some open domain Ω ⊆ S d if for each w ∈ Ω there is an r = r ( w ) > 0 such that D d ( w , r ) ⊆ Ω and f can be written as an absolutely and uniformly convergent power series for all z ∈ D d ( w , r ) f ( z ) = ∞ X i 1 ,..., i d = 0 a i 1 ,..., i d ( z 1 − w 1 ) i 1 · . . . · ( z d − w d ) i d (4.41) with coefficients a i 1 ,..., i d = 1 i 1 ! · . . . · i d ! µ ∂ ∂ z 1 ¶ i 1 · · · µ ∂ ∂ z d ¶ i d f ( z ) . (4.42) In case of a single complex variable Hilbert transform relates the conjugated parts of a holomorphic function on the boundary of a unit disk. Unit disk then can be mapped to the upper complex half-plane and we obtain the usual definition of the Hilbert transform on the real line . In case of polydisk in a hypercomplex space S d we proceed similarly . First we define Hilbert transform on the boundary of unit polydisk and then consider all biholomorphic mappings from the polydisk to the upper space S d + . Definition 4.30. Hilbert transform ˚ H j [ f ] of a function f : ∂ D j → R is given by ˚ H j [ f ] ³ e e 1 θ 1 , ..., e e d θ d ´ = 1 ( 4 π ) | j | π Z Z Z − π f ¡ e e i t i | i ∈ ind j ¢ Y i ∈ ind j cot µ θ i − t i 2 ¶ d t j , (4.43) where integration of f is only over the variables z i ≡ e e i t i indicated by the binary vector j ∈ { 0 , 1 } d . T o construct the holomorphic hypercomplex function from its real part, which is defined on the boundary of polydisk, we can find the corresponding hypercom- plex conjugated components by f j = ˚ H j [ f ] and sum the up. The relationship with one-variable Hilbert transform is the following. In complex analysis each holo- morphic function on the boundary of the unit disk has the form f a = f + i H [ f ], i.e. Hilbert transform relates two real-valued functions. In case of several hypercom- plex variables the situation is slightly different. The S d -valued function may be written for each j = 1 , . . . , d in the form f = f 1 + e j f 2 , however now f 1 and f 2 are not real-valued. Functions f 1 and f 2 have values lying in the span © e β | β 63 j ª . There- fore Hilbert transform in the variable z j relates hypercomplex conjugates within the plane S ( j ) by the expression f 2 = H j [ f 1 ]. Next we simply map the boundary of a polydisk to the boundary of Scheffers upper space . All biholomorphic mappings [ Gong and Gong, 2007 ] from the unit polydisk to the upper Scheffers space , i.e. D d → S d + , have the form ( w 1 , ..., w d ) 7→ µ ¯ a 1 w 1 − e e 1 θ 1 a 1 w 1 − e e 1 θ 1 , . . . , ¯ a d w d − e e d θ d a d w d − e e d θ d ¶ , where a i ∈ D ( i ) , θ i ∈ R . (4.44) 21 By picking up one such mapping we easily define the Hilbert transform H j on the boundary of S d + and get ( 3.8 ), similarly as it is described in Appendix A . Hyper - complex analytic signal is defined to be any holomorphic function f : S d + → S d on the boundary ∂ S d + ' R d . Definition 4.31. The Sc heffers hypercomplex analytic signal f S : R d → S d is de- fined on the boundary of upper Scheffers space ∂ S d + ' R d from its real part f : R d → R by f S ( x ) = X j ∈ { 0,1 } d e j H j [ f ] ( x ) . (4.45) In one varialbe complex analysis the Riemann mapping theorem states that for any simply connected open subset U ⊆ C there exists biholomorphic mapping of U to the open unit disk in C . However in case of several complex variables d ≥ 2 this result does not hold anymore [ Krantz, 2001 ]. P oincaré proved that in any dimension d ≥ 2 in case of d complex variables the ball is not biholomorphic to the polydisk. Even though the proof of P oincaré theorem in case of mappings S d → S d is out of scope of this paper this conjecture has important consequences. W e rely mainly on the d -polydisk D d ⊂ S d as a domain of the hypercomplex holomorphic function. If there is no biholomorphic mapping from polydisk in S d to the ball in S d then on their boundaries holomorphic functions will be quite different as well, i.e. it will be impossible to map holomorphic function defined as a limit on the boundary of polydisk to the holomorphic function defined on the boundary of a ball. There is one simple argument on why probably there is no biholomorphic mapping from boundary of open polydisk to the boundary of a ball. The boundary of polydisk is given by torus , while the boundary of a ball is given by hypersphere . T orus and sphere are not homeomorphic for d ≥ 2. Therefore it is hard to expect existence of a biholomorphic mapping between the two topologically different domains . Analytic signal was defined as extension of some holomorphic function inside polydisk to its boundary that is torus . Extension of the mapping ( 4.44 ) to the boundary relates points on torus T d with points on R d . There are other mappings that one can use to relate points on a compact shape with the points of R d . On the other hand, shape that one chooses to represent R d could also be used for con- venient parametrization of analytic signal. F or example, in one variable complex analysis , phase of analytic signal is given by the angle on the boundary of unit disk. Here we advocate the use of torus T d as a natural domain not only to define analytic signal but also to parametrize analytic signal’ s phase. Suppose instead we defined analytic signal on a unit sphere in S d . In this case if there is no biholomorphic mapping between ball and polydisk in S d the definition of analytic signal as a limiting case of holomorphic function on the boundary of the ball will differ from the polydisk case. V ery probable that we will not be able to employ partial Hilbert transforms H j as simple relationships between conjugated components because there are no “selected” directions on the sphere . On the other hand, parametrization of analytic signal by a point on a sphere in S d could provide an alternative definition for the phase of a signal in R d . Sphere and torus both locally look similar to R d . However torus is given by the product T d = S 1 × . . . × S 1 and R d is given by the product R d = R 1 × . . . × R 1 , therefore there is a natural way to assign circle to each direction in R d . In contrast hypersphere is a simple object 22 that cannot be decomposed. Later in Observation 5.7 we use parametrization on torus to describe certain class of analytic signals . 5 Commutative hypercomplex F ourier transform In this section we will define the F ourier transform that naturally arises for func- tions f : R d → S d . W e start by assuming that we are working in some appropri- ately defined Schw artz space S ¡ R d , S d ¢ of rapidly decreasing S d -valued functions [ Strichartz, 2003 ]. F ourier transform F : S → S is an automorphism on S . After defining the F ourier transform we show that analytic signal is supported only on positive quadrant of frequency space , the property that is frequently desired in applications . In other words we are able to recover the phase-shifted functions f j by restricting spectrum of the F ourier transform of a real-valued function to the positive quadrant in frequency space. After establishing basic facts about F ourier transform we proceed to the Bedrosian’ s theorem that allows one to easily con- struct the hypercomplex analytic signal in the Euler form from the real-valued oscillating function. Definition 5.1 (Schwartz space) . The space S d ¡ R d , S d ¢ of rapidly decreasing func- tions f : R d → S d is S ³ R d , S d ´ = n f ∈ C ∞ ³ R d , S d ´ : k f k α , β < ∞ ∀ α , β ∈ N d o , (5.1) where α , β are multi-indices, C ∞ ¡ R d , S d ¢ is the set of smooth functions from R d to S d , and k f k α , β = sup x ∈ R d ¯ ¯ ¯ x α ∂ β f ( x ) ¯ ¯ ¯ . (5.2) T o put it simply , Sc hwartz class contains all smooth functions for which all the derivatives go to zero at infinity faster than any polynomial with inverse powers . W e define hypercomplex F ourier transform in terms of phase-shifted harmon- ics . Although the definition is a bit lengthy , we still think that this form allows one to better focus on the harmonic ”pieces“ of F ourier transform as well as to see how hypercomplex numbers are working and where the possible non-commutativity of various hypercomplex algebras could cause troubles . Definition 5.2. The F ourier transf orm ˆ f = F [ f ] , with ˆ f : R d → S d , of a function f : R d → S d is defined by ˆ f ( ω ) = α 0...0 ( ω ) − d X i = 1 e i α 0...1( i )...0 ( ω ) + X i < j e i e j α 0...1( i , j )...0 ( ω ) − X i < j < k e i e j e k α 0...1( i , j , k )...0 ( ω ) + . . . , (5.3) where 0 . . . 1( i , j , k ) . . . 0 means that there are 1-s on the i -th, j -th and k -th positions of binary string . The inverse F ourier transform is given by f ( x ) = ˆ α 0...0 ( x ) + d X i = 1 e i ˆ α 0...1( i )...0 ( x ) + X i < j e i e j ˆ α 0...1( i , j )...0 ( x ) + X i < j < k e i e j e k ˆ α 0...1( i , j , k )...0 ( x ) + . . . . (5.4) 23 This definition is equivalent (by applying Euler’ s formula) to the canonical form of hypercomplex F ourier transform ˆ f ( ω 1 , . . . , ω d ) = ∞ Z −∞ · · · ∞ Z −∞ f ( x 1 , x 2 , . . . , x d ) e − e 1 ω 1 x 1 · . . . · e − e d ω d x d d x 1 . . . d x d , (5.5) f ( x 1 , x 2 , . . . , x d ) = 1 ( 2 π ) d ∞ Z −∞ · · · ∞ Z −∞ ˆ f ( ω 1 , . . . , ω d ) e e 1 ω 1 x 1 · . . . · e e d ω d x d d x 1 . . . d x d . (5.6) The inverse F ourier transform ( 5.4 ) may be rewritten using ( 3.11 ) as f ( x ) = ˆ f ( ω ) , α 0...0 ® + X i e i ˆ f ( ω ) , α 0...1( i )...0 ® + X i < j e i e j ˆ f ( ω ) , α 0...1( i , j )...0 ® + . . . . (5.7) Next we observe that phase-shifted functions f j are easily recovered from the re- striction of F ourier transform to only positive frequencies. Theorem 5.3. T he function f h : R d → S d defined by the real-valued function f : R d → R as f h ( x ) = ˆ f ( ω ) , α 0...0 ® + + X i e i ˆ f ( ω ) , α 0...1( i )...0 ® + + X i < j e i e j ˆ f ( ω ) , α 0...1( i , j )...0 ® + + . . . (5.8) has as components the corresponding phase-shifted functions f j , i.e . f h ( x ) = f ( x ) + X i e i f 0...1( i )...0 ( x ) + X i < j e i e j f 0...1( i , j )...0 ( x ) + X i < j < k e i e j e k f 0...1( i , j , k )...0 ( x ) + . . . , (5.9) and therefore f h ≡ f S . Proof. F or a proof we simply put each term from the sum in ( 5.3 ) inside ( 5.8 ) and observe that components in ( 5.9 ) are defined by ( 3.12 ). Observation 5.4. The F ourier transform of f S is given by ˆ f S ( ω ) = d Y i = 1 [ 1 + sign( ω i ) ] ˆ f ( ω 1 , . . . , ω d ) . (5.10) In the following we proceed to the Bedrosian’s theorem telling us that Hilbert transform of the product of a low-pass and a high-pass functions with non-overlapping spectra is given by the product of the low-pass function by the Hilbert transform of the high-pass function. W e rely on the original work [ Bedrosian, 1962 ]. In the following ind( j ) = { i | j i = 1 } , the set of positions of 1-s in the vector j ∈ { 0 , 1 } d and ind( j ) = { i | j i = 0 } is the complementary set. Lemma 5.5. F or a product of exponentials for a given j ∈ { 0 , 1 } d h ( x ) = Y i ∈ ind( j ) e e i ω i x i , (5.11) we have the identity H j [ h ] ( x ) = Y i ∈ ind( j ) e i sign( ω i ) e e i ω i x i . (5.12) 24 Proof. The result follows directly from the 1-dimensional case by succesive appli- cation of Hilbert transform. Theorem 5.6 (Bedrosian) . Let f , g : R d → S d and let us given some j ∈ { 0 , 1 } d . Suppose that for eac h k ∈ ind( j ) we have corresponding a k > 0 such that ˆ f k ( ω k ; x 1 , . . . , x k − 1 , x k + 1 , . . . x d ) = Z R f ( x 1 , . . . , x k , . . . , x d ) e − e k ω k x k d x k = 0 for all | ω k | > a k (5.13) and ˆ g k ( ω k ; x 1 , . . . , x k − 1 , x k + 1 , . . . x d ) = Z R g ( x 1 , . . . , x k , . . . , x d ) e − e k ω k x k d x k = 0 for all | ω k | ≤ a k . (5.14) T hen we have the identity H j [ f · g ] = f · H j [ g ] . (5.15) Proof. First we give the proof for 1-dimensional case and then extend it to our case. W e can write the product of two functions a ( x ) and b ( x ) in F ourier domain as a ( x ) b ( x ) = 1 (2 π ) 2 Z R Z R ˆ a ( u ) ˆ b ( v ) e i ( u + v ) x d u d v (5.16) and H [ a · b ]( x ) = 1 (2 π ) 2 Z R Z R ˆ a ( u ) ˆ b ( v ) i sign( u + v ) e i ( u + v ) x d u d v . (5.17) If we assume that for some a > 0 we ha ve ˆ a ( ω ) = 0 for | ω | > a and ˆ b ( ω ) = 0 for | ω | ≤ a , then the product ˆ a ( ω ) ˆ b ( ω ) will be non-vanishing only on two semi-infinite stripes on the plane { ( u , v ) : | u | < a , | v | > a } . So for this integration region the value of the integral ( 5.17 ) will not change if we replace sign( u + v ) → sign( v ) . Then we will have H [ a · b ]( x ) = 1 (2 π ) 2 Z R Z R ˆ a ( u ) ˆ b ( v ) i sign( v ) e i ( u + v ) x d u d v = a ( x ) 1 2 π Z R ˆ b ( v ) i sign( v ) e i v x d v . (5.18) But we know from Lemma 5.5 that H [ b ]( x ) = 1 2 π Z R ˆ b ( v ) H h e i v x 0 i ( x ) d v = 1 2 π Z R ˆ b ( v ) i sign( v ) e i v x d v . (5.19) So finally we have H [ a · b ] = a · H [ b ] . (5.20) 25 T o prove the final result ( 5.15 ), we succesively apply 1-dimensional steps taken in ( 5.18 ), ( 5.19 ) and the result of Lemma 5.5 H j [ f · g ]( x ) = 1 (2 π ) 2 | j | Z Z Z R | j | Z Z Z R | j | ˆ f j ³ u ind( j ) ; x ind( j ) ´ ˆ g j ³ v ind( j ) ; x ind( j ) ´ · Y i ∈ ind( j ) e i sign( u i + v i ) e e i ( u i + v i ) x i d u j d v j , (5.21) where we denoted by ˆ f j ³ u ind( j ) ; x ind( j ) ´ and ˆ g j ³ v ind( j ) ; x ind( j ) ´ the F ourier trans- forms of f and g over the directions indicated by j . Thus ˆ f j ³ u ind( j ) ; x ind( j ) ´ has as its arguments frequency variables indexed by ind( j ) and the remaining spatial variables indexed by the complementary set ind( j ). Finally by repeating the steps taken in ( 5.18 ), ( 5.19 ) we conclude that H j [ f · g ] = f · H j [ g ]. Observation 5.7. Suppose we have two real-valued functions A , B : R d → R that satisfy conditions ( 5.13 ) and ( 5.14 ) respectively for j = 1 . Additionally suppose that B ( x ) = α 0 ( x , ω 0 ) for some choice of frequencies ω 0 . Then we can write the analytic signal f S of the product function C ( x ) = A ( x ) · B ( x ) in compact form C S ( x ) = A ( x ) e e 1 ω 1 x 1 · . . . · e e d ω d x d . (5.22) If we suppose more generally that B ( x ) is of the form B ( x ) = d Y l = 1 cos ¡ φ l ( x ) ¢ (5.23) and satisfies condition ( 5.14 ), we can write its analytic signal C S ( x ) then as C S ( x ) = A ( x ) e e 1 φ 1 ( x ) · . . . · e e d φ d ( x ) . (5.24) F or a 1-dimensional complex-valued function we interpret its multiplication by a complex number as rotation and scaling in the complex plane. Here we have sim- ilar geometric interpretation of narrowband hypercomplex analytic signal having the form ( 5.24 ). First of all, each exponential e e i φ i represent phase rotations in the corresponding hypercomplex subspace S ( i ) by the angle φ i . Therefore for C S ( x ) in ( 5.24 ) we have a combination of d separate rotations , i.e. the overall rotation will correspond to a point on the product of d circles S 1 × . . . × S 1 . The product of circles is a d -dimensional torus T d (see also discussion in the end of Section 4.2 ). The total phase of some hypercomplex analytic signal ( 5.24 ) therefore corresponds to some continuous map on torus γ : R d → T d . The amplitude function A ( x ) is at- tached to the points on the torus T d . One last observation is that even though we know that the target domain S d of analytic signal is not a division ring (e.g . e 1 + e 2 is not invertible), we can claim that the value of narrow-band analytic signal of the form ( 5.24 ) is alwa ys invertible thus leaving aside all the troubles concerning multiplicative inverse. 26 6 Analytic extension into upper space S d + One can extend hypercomplex analytic signal f a : R d → S d to the holomorphic func- tion in the upper hypercomplex space S d + by using P oisson kernel (see Appendix A ) or by using holomorphic F ourier transform. The inverse holomorphic F ourier transform is given simply by extending the domain of usual inverse F ourier trans- form ( 5.5 ) to S d + by f ( ζ 1 , ζ 2 , ..., ζ d ) = F − 1 £ ˆ f ¤ = 1 (2 π ) d ∞ Z −∞ · · · ∞ Z −∞ ˆ f ( ω 1 , . . . , ω d ) e e 1 ω 1 ζ 1 · ... · e e d ω d ζ d d x 1 . . . d x d , (6.1) where each ζ i ∈ S + ( i ). Next we wish to understand under what conditions the above integral is well behaved. In case the integral in ( 6.1 ) is a nice integral, we could use for exam- ple Leibniz’ s rule to c heck whether generalized Cauc hy-Riemann conditions ( 4.35 ) are satisfied. W e could fall into troubles in some cases, for example, when ˆ f is supported on the whole R d . It will make the modulus of exponentials e e i ω i ζ i grow exponentially fast with ω i → −∞ , thus making the integral undefined. F ortunately we already know from the previous section that frequency support of our analytic signal ˆ f S is [0 , ∞ ) d . The necessary and sufficient conditions for extension of a function into some (hyper -)complex domain (not necessarily upper space) are given by various Paley- Wiener theorems [ Strichartz, 2003 ]. In this work we are mainly interested in the extension of analytic signal into upper space S d + . W e will focus on this case only , while other P aley-Wiener type theorems may be constructed similarly to those given in Chapter 7 . 2 of [ Strichartz, 2003 ]. W e will need several technical definitions . First of all let us define the space of square integrable functions L 2 and Hardy space H 2 of integrable holomorphic functions as following . Definition 6.1. Let f : R d → S d . W e say f ∈ L 2 ¡ R d , S d ¢ if ∞ Z Z Z −∞ | f ( x 1 , ..., x d ) | 2 d x 1 ... d x d < ∞ , (6.2) where norm | · | in the space S d is given by ( 4.10 ). W e say f ∈ L 2 ¡ R d + , S d ¢ when f is supported on [ 0 , ∞ ) d . Definition 6.2 (Hardy space) . Let f : S d + → S d be holomorphic in S d + . W e say that f ∈ H 2 ¡ S d + , S d ¢ if sup y i > 0 i = 1,..., d ∞ Z Z Z −∞ | f ( x 1 + e 1 y 1 , ..., x d + e d y d ) | 2 d x 1 ... d x d < ∞ . (6.3) In general case , Hardy spaces H p are defined separately for open disk and upper half-plane (see Chapters 13 . 3 and 13 . 4 of [ Greene and Krantz, 2006 ] and 27 [ Ricci, 2004 ]). F or an arbitrary 1 < p ≤ ∞ , Möbius transformation is not an isomor- phism between Hardy spaces on disk and upper half-plane. Situation is different for p = 2, where Möbius transformation of the form ( 4.44 ) is an isometric isomor - phism between Hardy spaces for upper space S d + and polydisk D d . Morevoer we can assume that H 2 is sufficiently large class of functions because for the case of one complex variable Lemma 13 . 3 . 2 in [ Greene and Krantz, 2006 ] tells us that if 0 < p 1 < p 2 < ∞ , then H p 2 ( D , C ) ( H p 1 ( D , C ) . After these observations we let us work in space H 2 ¡ S d + , S d ¢ . Finally we proceed to the central theorem that al- lows extension of hypercomplex analytic signal into upper space S d + by means of holomorphic F ourier transform. Theorem 6.3 (P aley-Wiener) . Let ˆ f : R d → S d with ˆ f ∈ L 2 ¡ R d + , S d ¢ . Then f ( ζ ) = F − 1 £ ˆ f ( ω ) ¤ ( ζ ) is in H 2 ¡ S d + , S d ¢ . Furthermore the usual inverse F ourier transform f ( x 1 , . . . , x d ) of ˆ f ( ω 1 , . . . , ω d ) is the limit of f ( ζ 1 , . . . , ζ d ) ≡ f ( x 1 + e 1 y 1 , . . . , x d + e d y d ) as each y i → 0 + for i = 1 , . . . , d in the following sense lim ( y 1 ,..., y d ) → (0 + ,...,0 + ) ∞ Z Z Z −∞ | f ( x 1 + e 1 y 1 , . . . , x d + e d y d ) − f ( x 1 , . . . , x d ) | 2 d x 1 . . . d x d = 0 . (6.4) Conversely , suppose f ∈ H 2 ¡ S d + , S d ¢ then there exist g ∈ L 2 ¡ R d + , S d ¢ such that g is an inverse holomorphic F ourier transform of f , i.e . f = F − 1 [ g ] . Proof. Proof is essentially the same as in case of one complex variable. Discussion may be found in [ Strichartz, 2003 ], see Theorem 7 . 2 . 4, or for example see Theorem 3 . 2 in [ Ricci, 2004 ]. In one-variable complex analysis the holomorphic F ourier transform is an op- erator that is isometric isomorphism due to the Plancherel theorem. If we denote by C + and C − the upper and lower complex half-planes respectively , Paley-W iener theorem provides us with decomposition of the space of squarely integrable func- tions L 2 ( R , C ) = H 2 ( C + , C ) ⊕ H 2 ( C − , C ) . Similar result could easily be obtained for functions R d → S d , however as we could expect now we will have all possible 2 d factors of mixed spaces . Remark 6.4. W e have the following decomposition L 2 ³ R d , S d ´ = M j ∈ { 0,1 } d S + j , (6.5) where spaces S + j were defined in ( 4.17 ). This is a concise version of P aley-Wiener theorem 6.3 . 7 Why non-commutative F ourier transforms does not fit for d>2? There were propositions to apply F ourier transforms based on non-commutative algebras , like Clifford and Cayley-Dickson construction, to study instantaneous 28 amplitude, phase and frequency . The aim of this section is to show that there is no non-commutative F ourier transform in the canonical form ( 5.5 ), which lead us to the phase-shifted functions f j after restriction of the support of F ourier transform only to the positive quadrant. It is interesting to note that Bülow and Sommer in the early work [ Bülow and Sommer , 2001 ] mention slightly the commutative hypercomplex numbers and associated F ourier transform, however later studies were mainly focused on the non-commutative hypercomplex systems . W e make all the derivations for the case of Clifford algebra-valued F ourier transform and then find that result is also valid for any non-commutative algebra. First we make a brief introduction to the Clifford algebras. A Clifford algebra is a unital associative algebra that is generated by a vector space V over some field K , where V is equipped with a quadratic form Q : V → K . If the dimension of V over K is d and { e 1 , . . . , e d } is an orthogonal basis of ( V , Q ) , then C l ( V , Q ) is a free vector space with a basis © e i 1 e i 2 . . . e i k | 1 ≤ i 1 < i 2 < · · · < i k ≤ d and 0 ≤ k ≤ d ª . (7.1) Element e 0 is defined as the multiplicative identity element. Due to the fact that V is equipped with quadratic form we have an orthogonal basis ¡ e i , e j ¢ = 0 for i 6= j , and ( e i , e i ) = Q ( e i ) , (7.2) where ( · , · ) denotes the symmetric bilinear form associated to Q . The fundamental Clifford identity implies that Clifford algebra is anticommutative e i e j = − e j e i for i 6= j , and ( e i , e i ) = Q ( e i ) , (7.3) which makes multiplication of the elements of Clifford algebra quite simple, we can put elements of a Clifford algebra in standard order simply by a number of swaps of neighbouring elements. Every nondegenerate form Q can be written in standard diagonal form: Q ( v ) = v 2 1 + · · · + v 2 p − v 2 p + 1 − · · · − v 2 p + q , (7.4) with d = p + q . The pair of integers ( p , q ) is called the signature of the quadratic form. The corresponding Clifford algebra is then denoted as C l p , q ( R ). F or our purposes of analytic signal construction (see discussion on elliptic units in Section 4.1 ) we will consider just Clifford algebras C l 0, q ( R ) over the field of real numbers R , with the quadratic form Q ( e i ) = − 1 for 1 ≤ i ≤ d . (7.5) Each element x ∈ C l 0, d ( R ) of Clifford algebra may be thought as a linear com- bination of its basis elements x = x 0 1 + X i x i e i + X i < j x i j e i e j + X i < j < k x i j k e i e j e k + . . . (7.6) with real coefficients and for which we also have identities e i e j = − e j e i for i 6= j , and e 2 i = − 1. 29 First for our proof it will be handy to define the set-valued function Π that returns all permuted products of its arguments. F or example for 3 arguments it acts as Π ( a , b , c ) = { a · b · c , a · c · b , b · a · c , c · a · b , b · c · a , c · b · a } . (7.7) F or d arguments Π acts analogously . A particular Clifford-F ourier transform is then defined as ˆ f C l ( ω 1 , . . . , ω d ) = ∞ Z −∞ · · · ∞ Z −∞ ρ ¡ f ( x 1 , x 2 , . . . , x d ) , e − e 1 ω 1 x 1 , . . . , e − e d ω d x d ¢ d x 1 . . . d x d , (7.8) where ρ ¡ f ( x 1 , x 2 , . . . , x d ) , e − e 1 ω 1 x 1 , . . . , e − e d ω d x d ¢ ∈ Π ¡ f ( x 1 , x 2 , . . . , x d ) , e − e 1 ω 1 x 1 , . . . , e − e d ω d x d ¢ . A Clifford-F ourier transform ( 7.8 ) has inverse transform given by f ( x 1 , . . . , x d ) = 1 ( 2 π ) d ∞ Z −∞ · · · ∞ Z −∞ ρ 0 ³ ˆ f C l ( ω 1 , ω 2 , ..., ω d ) , e e 1 ω 1 x 1 , . . . , e e d ω d x d ´ d x 1 . . . d x d , (7.9) for some ρ 0 ³ ˆ f C l ( ω 1 , ω 2 , ..., ω d ) , e e 1 ω 1 x 1 , . . . , e e d ω d x d ´ ∈ Π ³ ˆ f C l ( ω 1 , ω 2 , ..., ω d ) , e e 1 ω 1 x 1 , . . . , e e d ω d x d ´ . W e can expand the exponentials in ( 7.8 ) and ( 7.9 ) to write down the general Clifford- F ourier transform in terms of functions α k and ˆ α k ˆ f C l = ρ 0 − d X i = 1 ρ 1 ( i ) + X i < j ρ 2 ( i , j ) − X i < j < k ρ 3 ( i , j , k ) + . . . , (7.10) f = ρ 0 0 + d X i = 1 ρ 0 1 ( i ) + X i < j ρ 0 2 ( i , j ) + X i < j < k ρ 0 3 ( i , j , k ) + . . . , (7.11) for some ρ k and ρ 0 k , where ρ 0 = α 0...0 , ρ 1 ( i ) ∈ Π ³ e i , α 0...1( i )...0 ´ , ρ 2 ( i , j ) ∈ Π ³ e i , e j , α 0...1( i , j )...0 ´ , ρ 3 ( i , j , k ) ∈ Π ³ e i , e j , e k , α 0...1( i , j , k )...0 ´ , . . . (7.12) and ρ 0 0 = ˆ α 0...0 , ρ 0 1 ( i ) ∈ Π ³ e i , ˆ α 0...1( i )...0 ´ , ρ 0 2 ( i , j ) ∈ Π ³ e i , e j , ˆ α 0...1( i , j )...0 ´ , ρ 0 3 ( i , j , k ) ∈ Π ³ e i , e j , e k , ˆ α 0...1( i , j , k )...0 ´ , . . . . (7.13) 30 W e now check whether Clifford-F ourier “analytic signal” given by the restric- tion of Clifford based F ourier transform only to positive frequencies works for defining the instantaneous amplitude and phase . As we did before we use bracket notation ( 2.23 ), ( 2.24 ) and chec k whether F ourier transform written in the form similar to ( 5.8 ) will work. P ositive frequency restricted Clifford “analytic signal” of the real-valued function f : R d → R is given by f C l = ρ 0 + 0 + d X i = 1 ρ 0 + 1 ( i ) + X i < j ρ 0 + 2 ( i , j ) + X i < j < k ρ 0 + 3 ( i , j , k ) + . . . , (7.14) with some ρ 0 + i : ρ 0 + 0 = ˆ α 0...0 C l + , ρ 0 + 1 ( i ) ∈ Π ³ e i , ˆ α 0...1( i )...0 C l + ´ , ρ 0 + 2 ( i , j ) ∈ Π ³ e i , e j , ˆ α 0...1( i , j )...0 C l + ´ , ρ 0 + 3 ( i , j , k ) ∈ Π ³ e i , e j , e k , ˆ α 0...1( i , j , k )...0 C l + ´ , . . . , (7.15) where ˆ α j C l + ( x ) = f C l ( ω ) , α j ( x , ω ) ® + . Theorem 7.1 (Non-existence result) . T he Clifford algebra valued “analytic signal” f C l : R d → C l 0, d ( R ) of the real-valued function f : R d → R , where f C l is given by ( 7.14 ) , in general does not have as components the corresponding phase-shifted functions f j , defined as ( 3.4 ) , i.e . if we have f C l ( x ) = f ( x ) + X i e i ˜ f 0...1( i )...0 ( x ) + X i < j e i e j ˜ f 0...1( i , j )...0 ( x ) + X i < j < k e i e j e k ˜ f 0...1( i , j , k )...0 ( x ) + . . . (7.16) then there exist j ∈ { 0 , 1 } d such that | ˜ f j | 6= | f j | for any d > 2 . T herefore there is no Clifford algebra based F ourier transform of the form ( 7.8 ) and ( 7.9 ) for d > 2 that will lead us to the phase-shifts f j as components of e j . Proof. T o prove this theorem it will suffice to demonstrate that we are not able to choose the proper ordering of multiplicative terms in ( 7.8 ) and ( 7.9 ) such that ˜ f j = f j for any j ∈ { 0 , 1 } d . Next we simply show that already for the elements of degree 1, i.e. in front of corresponding e i , we already must have | ˜ f 0...1( i )...0 | 6= | f 0...1( i )...0 | for some i . F irst let us write the Clifford-F ourier transform for elements of degree up to 1 ˆ f C l ( ω ) = α 0...0 ( ω ) − e 1 α 10...0 ( ω ) − e 2 α 010...0 ( ω ) − e 3 α 0010...0 ( ω ) − . . . − e d α 0...01 ( ω ) + . . . . (7.17) F or the elements of degree up to 1 in ( 7.17 ) we may not care about the order of multiplication because f ( x ) is real valued. Then we show that there is no ordering of multiplicative terms in the inverse formula ( 7.9 ) to obtain the right signs of phase-shifted components in accordance with ( 3.12 ). F or simplicity , but without loss of generality , we consider just the combinations of components corresponing to the first three elements e 1 , e 2 and e 3 . In this case potentially we have the four following candidates for the inverse F ourier transform. 31 1. Zero elements are flipped: c 0 ( x ) = ˆ α 0...0 ( x ) + e 1 D ˆ f C l ( ω ) , α 10...0 ( x , ω ) E + e 2 D ˆ f C l ( ω ) , α 010...0 ( x , ω ) E + e 3 D ˆ f C l ( ω ) , α 0010...0 ( x , ω ) E + . . . . (7.18) 2. One element is flipped: c 1 ( x ) = ˆ α 0...0 ( x ) + D ˆ f C l ( ω ) , α 10...0 ( x , ω ) E e 1 + e 2 D ˆ f C l ( ω ) , α 010...0 ( x , ω ) E + e 3 D ˆ f C l ( ω ) , α 0010...0 ( x , ω ) E + . . . . (7.19) 3. Two elements are flipped: c 2 ( x ) = ˆ α 0...0 ( x ) + D ˆ f C l ( ω ) , α 10...0 ( x , ω ) E e 1 + D ˆ f C l ( ω ) , α 010...0 ( x , ω ) E e 2 + e 3 D ˆ f C l ( ω ) , α 0010...0 ( x , ω ) E + . . . . (7.20) 4. Three elements are flipped: c 3 ( x ) = ˆ α 0...0 ( x ) + D ˆ f C l ( ω ) , α 10...0 ( x , ω ) E e 1 + D ˆ f C l ( ω , α 010...0 ( x , ω ) E e 2 + D ˆ f C l ( ω ) , α 0010...0 ( x , ω ) E e 3 + . . . . (7.21) Therefore for c i serving as inverse we will obtain the components of degree 2 of f C l by simple subtitution of each term of ˆ f C l ( ω ) from ( 7.17 ) into ( 7.18 ), ( 7.19 ), ( 7.20 ) and ( 7.21 ). That will give us the following hypercomplex components after we restrict the integration only to positive frequencies . 1. F or c 0 we have ˜ f 0 j : | j |= 2 = − e 2 e 1 α 100...0 , α 010...0 ® + − e 1 e 2 α 010...0 , α 100...0 ® + − e 3 e 1 α 100...0 , α 0010...0 ® + − e 1 e 3 α 0010...0 , α 100...0 ® + − e 3 e 2 α 010...0 , α 0010...0 ® + − e 2 e 3 α 0010...0 , α 010...0 ® + + . . . . 2. F or c 1 we have ˜ f 1 j : | j |= 2 = − e 2 e 1 α 100...0 , α 010...0 ® + − e 2 e 1 α 010...0 , α 100...0 ® + − e 3 e 1 α 100...0 , α 0010...0 ® + − e 3 e 1 α 0010...0 , α 100...0 ® + − e 3 e 2 α 010...0 , α 0010...0 ® + − e 2 e 3 α 0010...0 , α 010...0 ® + + . . . . 3. F or c 2 we have ˜ f 2 j : | j |= 2 = − e 1 e 2 α 100...0 , α 010...0 ® + − e 2 e 1 α 010...0 , α 100...0 ® + − e 3 e 1 α 100...0 , α 0010...0 ® + − e 3 e 1 α 0010...0 , α 100...0 ® + − e 3 e 2 α 010...0 , α 0010...0 ® + − e 3 e 2 α 0010...0 , α 010...0 ® + + . . . . 32 4. F or c 3 we have ˜ f 3 j : | j |= 2 = − e 1 e 2 α 100...0 , α 010...0 ® + − e 2 e 1 α 010...0 , α 100...0 ® + − e 1 e 3 α 100...0 , α 0010...0 ® + − e 3 e 1 α 0010...0 , α 100...0 ® + − e 2 e 3 α 010...0 , α 0010...0 ® + − e 3 e 2 α 0010...0 , α 010...0 ® + + . . . . From the rule in ( 3.12 ) we know that with each flipping of 1 in the upper subscript to 0 at the same position in the lower subscript the sign of bracket changes . If we look at ˜ f 0 j : | j |= 2 , we see that terms that are components of e 1 e 2 , i.e. α 100...0 , α 010...0 ® + and α 010...0 , α 100...0 ® + sum up with opposite signs . The same is true for the com- ponents of e 1 e 3 and e 2 e 3 – they come all with opposite signs. Therefore case of c 0 -type inverse formula is not in accordance with the rule ( 3.12 ). F or the case c 1 we see that the components of e 1 e 2 have the same sign as well as components of e 1 e 3 , however components of e 2 e 3 have opposite signs. Thus c 1 is not in accor - dance with ( 3.12 ). After checking the rule for c 2 and c 3 we see that we will alwa ys have different signs for some component. Therefore we are not able to order prop- erly the terms in Clifford algebra based F ourier transform and its inverse F ourier transform to correctly restore all the phase-shifted functions . Corollary 7.2. F rom the proof of Theorem 7.1 it follows that essentiall y only com- mutative hypercomplex algebra ( e i e j = e j e i ) is a good candidate to provide us with the phase-shifts ( 3.12 ) by using positive frequency restriction for F ourier trans- forms of the type ( 7.8 ) and ( 7.9 ). The word “essentially” above means that al- gebras with two elliptic hypercomplex units that anticommute are still allowed when d = 2. Remark 7.3 (Octonions , Sedenions and Cayley-Dickson construction) . There were propositions to use Cayley-Dickson algebras to define the F ourier transform ( 7.8 ), ( 7.9 ) and corresponding hypercomplex “analytic signal” [ Hahn and Snopek, 2016 ], however as far as elements { e i } of these algebras are non-commutative we will not reconstruct the phase-shifts correctly . Example 7.4. W e may wonder what happens in case d = 2. Is there any Clifford algebra based F ourier transform that provides us with the correct phase-shifted components? It seems that the answer should be - yes. And indeed the symmetric quaternionic based F ourier transform does the job. Let Q be the ring of quaternions with the set of basis elements { 1 , i , j , k } . The ring of quaternions coincides with the Clifford algebra C l 0,2 ( R ) that in turn has the set of basis elements { 1 , e 1 , e 2 , e 1 e 2 } where i = e 1 , j = e 2 , k = e 1 e 2 . The symmetric quaternionic F ourier transform is defined as ˆ f q ( ω 1 , ω 2 ) = Z R Z R e − e 1 ω 1 x 1 f ( x 1 , x 2 ) e − e 2 ω 2 x 2 d x 1 d x 2 , (7.22) f ( x 1 , x 2 ) = 1 (2 π ) 2 Z R Z R e e 1 ω 1 x 1 ˆ f q ( ω 1 , ω 2 ) e e 2 ω 2 x 2 d x 1 d x 2 , (7.23) 33 (a) Oscillations inside the point-cloud cube (b) Instantaneous amplitude Figure 1: Point cloud of a cube with a deleted octant is shown. (a) Illustration of oscillating process f ( x , y , z ) that takes place inside the cube; (b) Instantaneous amplitude of the oscillating process. which we may rewrite using the notation from ( 3.10 ) as ˆ f q ( ω 1 , ω 2 ) = α 00 − e 1 α 10 − e 2 α 01 + e 1 α 11 e 2 , (7.24) f ( x 1 , x 2 ) = ˆ f q , α 00 ® + e 1 ˆ f q , α 10 ® + ˆ f q , α 01 ® e 2 + e 1 ˆ f q , α 11 ® e 2 . (7.25) The quaternionic “analytic signal” is obtained by restriction of the quaternion F ourier transform to the positive frequencies as we did before f q a = α 00 , α 00 ® + + α 10 , α 10 ® + + α 01 , α 01 ® + + α 11 , α 11 ® + − e 1 α 10 , α 00 ® + + e 1 α 00 , α 10 ® + − e 1 α 11 , α 01 ® + + e 1 α 01 , α 11 ® + − α 01 , α 00 ® + e 2 + α 00 , α 01 ® + e 2 − α 11 , α 10 ® + e 2 + α 10 , α 11 ® + e 2 + e 1 α 11 , α 00 ® + e 2 + e 1 α 00 , α 11 ® + e 2 − e 1 α 10 , α 01 ® + e 2 − e 1 α 01 , α 10 ® + e 2 . (7.26) As we see, the components of quaternionic analytic signal indeed provide us with the correct phase-shifts given by ( 3.12 ). 8 Examples and limitations 8.1 Simple example in 3-D As a direct illustration of how the construction of envelope works , we provide an example in 3-D. The oscillating function that we analyse is given by the cosine wa ve modulated by a Gaussian window: f ( x , y , z ) = e − 10 x 2 − 20 y 2 − 20 z 2 cos ( 50 x ) cos ( 40 y ) cos ( 60 z ) = f x ( x ) f y ( y ) f z ( z ) . (8.1) This particular toy example allows us to separate the variables when calculating the phase-shifted components f j from ( 3.12 ). In three dimensions we will have in total ¯ ¯ { 0 , 1 } 3 ¯ ¯ = 8 shifted functions . Calculation of some f j using ( 3.4 ) reduces to the calculation of direct and in- verse cosine and sine transforms . F or example for the f 100 shifted component, we 34 will have f 100 ( x , y , z ) = f y ( y ) f z ( z ) π Z ∞ 0 Z ∞ −∞ f x ( x ) sin ¡ ω 1 ( x − x 0 ) ¢ d x 0 d ω 1 . (8.2) T aking into account that f is even in each variable, after expanding the sine of difference, we see that we have to calculate only forward cosine and inverse sine transforms . This double integral can be calculated in semi-analytic form using erf( x ) = 2 p π R x 0 e − t 2 d t by 2 π ∞ Z 0 sin ( ω x ) ∞ Z 0 e − α ˜ x 2 cos ( ω x ˜ x ) cos ( ω ˜ x ) d ˜ x d ω = 1 2 i e − x ( ω x i + α x ) · erf µ ω x /2 − i α x p α ¶ − e 2 ω x i x erf µ ω x /2 + i α x p α ¶¸ . (8.3) T o illustrate the resulting envelope of function ( 8.1 ), in Fig. 1 we vizualize a point cloud in a cube [0 , 1] 3 with removed octant where each point is colour coded according to the value of f (the origin with respect to function ( 8.1 ) is shifted by 0 . 5 in eac h direction). This method allows visualization of a function “inside” the cube by observing it over the inner faces of the deleted octant. In Fig. 1 (a) the original f ( x , y , z ) is plotted, while in Fig . 1 (b) we plot the envelope function a ( x , y , z ) ob- tained from ( 3.5 ) that was computed on the 8 phase-shifted functions similarly to ( 8.2 ). 8.2 Amplitude on a smooth graph Objective of this section is to illustrate amplitude construction for an oscillating function defined over the vertices of a smooth graph or point c loud. The topology of a graph can be captured by a variety of operators like adjacency operator or Lapla- cian [ Chung, 1997 ]. In this example we start by considering a smooth point cloud patch of curved surface, then we construct the corresponding k nearest neighbors graph on top of the points . Finally we embed the graph in R 2 and calculate am- plitude in the transformed space where the points are flattened. As an embedding of a graph in R 2 we rely on the diffusion maps embedding [ Coifman and Lafon, 2006 , Coifman et al., 2005 ]. The graph in this example is constructed as follows . W e take a sampled patch on the sphere consisting of 4096 randomly picked points as illustrated by Fig . 2 (a). The resulting point cloud is inherently 2-dimensional although it is embedded in 3 dimensions. As an oscillating function we consider a sum of two Gaussians modulated by different frequencies that lie on a curved surface. Then, to obtain an associated graph, we consider the k = 20 nearest neighbours graph to mesh the point cloud. Then we use the diffusion maps embedding , which is given by the first two eigenvectors of the normalised Laplacian, to embed the patch in R 2 . The resulting embedding of the corresponding k nearest neighbors graph with the same oscillating process is shown in Fig . 2 (b). T o calculate the discrete version of hypercomplex F ourier transform ˆ f ( ω ), we applied the transformation ( 5.5 ) to the discrete oscillating function given in Fig . 2 35 (a) Oscillations over a patch of sphere (b) Oscillating function in diffusion space (c) Resulting envelope over a patch of sphere (d) Amplitude in diffusion space Figure 2: Point cloud and diffusion embedding of the corresponding knn-graph. Oscillation process is given by the sum of modulated gaussians: (a) original point cloud with signal over it; (b) embed- ding of the point cloud by the first two eigenvectors of normalized Laplacian; (c) envelope of the original signal; (d) envelope of the original signal in diffusion space. (b) (axes are rescaled by a factor of 10). Then corresponding phase-shifted compo- nents were constructed by first restricting the spectrum ˆ f ( ω ) to positive frequen- cies according to ( 5.10 ) and applying inverse F ourier transform ( 5.5 ). All compu- tations were performed in the diffusion space where the initial point cloud is flat- tened. Discrete version of the F ourier transform ( 5.5 ) was calculated for the first 50 frequencies with step 1. Then we calculate the hypercomplex analytic signal by re- stricting the spectrum to positive frequencies according ( 5.10 ) prior to applying the inverse F ourier transform. In Fig. 2 (c) and (d), the envelope function of Eq. ( 3.5 ) is shown over the original point cloud and in the diffusion space, respectively . In Fig . 3 the phase-shifted components f j ( x ) for the four directions j = 00 , 10 , 01 and 11 in the diffusion space are shown. Even though the directions of oscillations are not perfectly aligned to the basis vectors in embedding space (see Fig. 2 (b)), the resulting amplitude still looks fine. In the following example we clarify this point by looking on how amplitude transforms under rotational transformation of the underlying oscillating process . 8.3 Amplitude of rotated process In this section we will look how amplitude transforms under rotational transfor - mation of underlying oscillating process . Let us start by considering the simplest 2-dimensional oscillating process f ( x , y ) = cos( x ) cos( y ) . (8.4) 36 (a) f 00 shifted component (b) f 10 shifted component (a) f 01 shifted component (b) f 11 shifted component Figure 3: Phase-shifted components in the diffusion space. Intuitively it is clear that such process should have constant amplitude. And in- deed using definition ( 3.3 ), we see that a ( x , y ) = q cos( x ) 2 cos( y ) 2 + sin( x ) 2 cos( y ) 2 + sin( x ) 2 cos( y ) 2 + sin( x ) 2 sin( y ) 2 = 1 . (8.5) Let us consider the rotation by π /4 applied to f . In this case the coordinates are transformed according to x 0 = 1 p 2 x − 1 p 2 y , y 0 = 1 p 2 x + 1 p 2 y . (8.6) By expanding f 0 ( x 0 , y 0 ) ≡ f ( x 0 , y 0 ) we get f 0 ( x , y ) = cos µ 1 p 2 x − 1 p 2 y ¶ cos µ 1 p 2 x + 1 p 2 y ¶ = 1 2 cos ³ p 2 x ´ + 1 2 cos ³ p 2 y ´ . (8.7) The phase-shifted components for f 0 are (recall that Hilbert transform of con- stant function is zero) f 0 00 ( x , y ) = 1 2 cos ³ p 2 x ´ + 1 2 cos ³ p 2 y ´ , f 0 10 ( x , y ) = 1 2 sin ³ p 2 x ´ , f 0 01 ( x , y ) = 1 2 sin ³ p 2 y ´ , f 0 11 ( x , y ) = 0 . (8.8) 37 Combining the terms together we get a 0 ( x , y ) a 0 ( x , y ) 2 = f 0 00 ( x , y ) 2 + f 0 10 ( x , y ) 2 + f 0 01 ( x , y ) 2 + f 0 11 ( x , y ) 2 = 1 4 cos ³ p 2 x ´ 2 + 1 4 cos ³ p 2 y ´ 2 + 1 2 cos ³ p 2 x ´ cos ³ p 2 y ´ + 1 4 sin ³ p 2 x ´ 2 + 1 4 sin ³ p 2 y ´ 2 = 1 2 h 1 + cos ³ p 2 x ´ cos ³ p 2 y ´i , (8.9) which is not constant. Therefore definition of amplitude ( 3.3 ) is only valid for oscillations aligned with the chosen orthogonal directions in R d . 8.4 Amplitude of lower dimensional process Next we provide an example of amplitude computation for 1-dimensional oscillat- ing process in R 2 . W e start by considering the simplest 1-dimensional oscillations in R 2 , given by f ( x , y ) = cos( x ) . (8.10) The phase-shifted components of f are f 00 ( x , y ) = cos ( x ) , f 10 ( x , y ) = sin ( x ) , f 01 ( x , y ) = 0 , f 11 ( x , y ) = 0 , (8.11) which gives constant instantaneous amplitude a ( x , y ) = 1 as expected. W e can conclude more generally that definition of amplitude ( 3.3 ) works well when oscil- lations in some directions are degenerate. Let us consider the rotated version of f and calculate its amplitude. As in the previous section we apply transformation ( 8.6 ) to f ( x , y ) and write f 0 as f 0 ( x , y ) = cos µ 1 p 2 x − 1 p 2 y ¶ = cos µ 1 p 2 x ¶ cos µ 1 p 2 y ¶ + sin µ 1 p 2 x ¶ sin µ 1 p 2 y ¶ . (8.12) The phase-shifted components of f 0 are given by f 0 00 ( x , y ) = cos µ 1 p 2 x − 1 p 2 y ¶ , f 0 10 ( x , y ) = sin µ 1 p 2 x − 1 p 2 y ¶ , f 0 01 ( x , y ) = − sin µ 1 p 2 x − 1 p 2 y ¶ , f 0 11 ( x , y ) = cos µ 1 p 2 x − 1 p 2 y ¶ . (8.13) Summing up the squares of phase-shifted components we get a 0 ( x , y ) = p 2, which is not the expected envelope equal to 1. W e observe similar problem with amplitude calculation of a rotated process as in the previous example. 38 9 Conclusion and future work In this work we extended analytic signal theory to describe oscillating functions over d -dimensional Euclidean space for the case when oscillations are aligned to d orthogonal directions given by orthonormal basis vectors of R d . There are several directions in which the presented work could be extended. First of all we need a method for amplitude calculation of a general oscillating process where oscilla- tions are observed in various independent directions , not only in the chosen or - thogonal. Second, the extension of hypercomplex analytic signal to manifolds with the properly defined hypercomplex holomorphic structure is needed. Third, the de- velopment of multidimensional phase-space or space-frequency analysis tools for the presented hypercomplex analytic signal model, like Wigner -Ville and Segal- Bargmann transforms , will allow to understand better the localization properties of multidimensional oscillating processes. F ourth, development of hypercomplex multidimensional filtering theory for the designed hypercomplex analytic signal will bring us a powerful tool for many practical problems . And finally , as a more distant objective there is a hope to find hypercomplex dynamic equations for mul- tidimensional oscillating processes that arise in nature as well as to develop the associated hypercomplex gauge theory that rely on the definition of instantaneous amplitude and phases. F rom application point of view we are going to investigate how theory presented in this paper could be applied in the domains where multidi- mensional oscillations are inherent, e.g . image/video analysis , sound and seismic wa ves, data oscillations in high-dimensional feature space in machine learning as well as complex oscillating phenomena in quantum field theory . A Hilbert transform for unit disk and upper half- plane Let us briefly describe the essence of the one dimensional Hilbert transform by following the lines of [ Krantz, 2009 ]. The usual way to introduce Hilbert transform is by using the Cauchy formula. If f is holomorphic on D ⊂ C and continuous on disk D up to the boundary ∂ D , we can get the value of f ( z ) from the values of f on the boundary ∂ D by Cauchy formula f ( z ) = 1 2 π i Z ∂ D f ( ζ ) ζ − z d ζ , z ∈ D . (A.1) W e can express the Cauchy kernel, 1 2 π i · d ζ ζ − z , 39 by taking ζ = e i ψ and z = r e i θ , as following 1 2 π i · d ζ ζ − z = 1 2 π · − i e − i ψ · i e i ψ d ψ e − i ψ ¡ e i ψ − r e i θ ¢ = 1 2 π · d ψ ¡ 1 − r e i ( θ − ψ ) ¢ = 1 2 π · 1 − r e − i ( θ − ψ ) ¯ ¯ 1 − r e i ( θ − ψ ) ¯ ¯ 2 d ψ = à 1 2 π · ¡ 1 − r cos ¡ θ − ψ ¢¢ ¯ ¯ 1 − r e i ( θ − ψ ) ¯ ¯ 2 d ψ ! + i à 1 2 π · r sin ¡ θ − ψ ¢ ¯ ¯ 1 − r e i ( θ − ψ ) ¯ ¯ 2 d ψ ! . (A.2) If we subtract 1 4 π d ψ from the real part of the Cauchy kernel, we get the P oisson kernel P r ( θ ) ℜ µ 1 2 π i · d ζ ζ − z ¶ − 1 4 π d ψ = 1 2 π à 1 − r cos ¡ θ − ψ ¢ ¯ ¯ 1 − r e i ( θ − ψ ) ¯ ¯ 2 − 1 2 ! d ψ = 1 2 π à 1 2 − 1 2 r 2 1 − 2 r cos ¡ θ − ψ ¢ + r 2 ! d ψ = : 1 2 P r ¡ θ − ψ ¢ . (A.3) Thus the real part is, up to a small correction, the P oisson kernel. The kernel that reproduces harmonic functions is the real part of the kernel that reproduces holomorphic functions . W e describe briefly the Poi sson integral formula. If D = { z : | z | < 1 } is the open unit disc in C and ∂ D is the boundary of D and there is continuous g : ∂ D → R , then the function u : D → R , given by u ³ r e i θ ´ = 1 2 π π Z − π P r ( θ − τ ) g ³ e i τ ´ d τ , 0 ≤ r < 1 , (A.4) will be harmonic on D and has radial limit r → 1 − that agrees with g almost ev- erywhere on ∂ D . Suppose now that we are given a real-valued function f ∈ L 2 ( ∂ D ) . Then we can use the P oisson integral formula to produce a function u on D such that u = f on ∂ D . Then we can find a harmonic conjugate u † of u , such that u † (0) = 0 and u + i u † is holomorphic on D . As a final goal we aim to produce a boundary function f † for u † and get the linear operator f 7→ f † . If we define a function h on D as h ( z ) = 1 2 π i Z ∂ D f ( ζ ) ζ − z d ζ , z ∈ D , (A.5) then h will be holomorphic in D . From ( A.3 ) we know that the real part of h is up to an additive constant equal to the P oisson integral u of f . Therefore ℜ ( h ) is harmonic on D and ℑ ( h ) is a harmonic conjugate of ℜ ( h ). Thus if h is continuous up to the boundary , then we can take u † = ℑ ( h ) and f † ¡ e i θ ¢ = lim r → 1 − u † ¡ r e i θ ¢ . F or the imaginary part of the Cauchy kernel ( A.2 ) under the limit r → 1 − we 40 get 1 2 π · r sin ¡ θ − ψ ¢ ¯ ¯ 1 − r e i ( θ − ψ ) ¯ ¯ 2 r → 1 − − − − − → 1 2 π · sin ¡ θ − ψ ¢ ¯ ¯ 1 − e i ( θ − ψ ) ¯ ¯ 2 = sin( θ − ψ ) 4 π ¡ 1 − cos( θ − ψ ) ¢ = 2 sin ³ θ − ψ 2 ´ cos ³ θ − ψ 2 ´ 8 π ³ cos ³ θ − ψ 2 ´´ 2 = 1 4 π cot µ θ − ψ 2 ¶ . Therefore we obtain the Hilbert transform H : f 7→ f † on the unit disk D as following H [ f ] ³ e i θ ´ = 1 4 π π Z − π f ³ e i t ´ cot µ θ − t 2 ¶ d t . (A.6) T aylor series expansion of the kernel in ( A.6 ) gives us cot µ θ 2 ¶ = cos ¡ θ 2 ¢ sin ¡ θ 2 ¢ = 1 − ( θ /2) 2 2! + . . . θ 2 ³ 1 − ( θ /2) 2 3! + . . . ´ = 2 θ + E ( θ ) , where E ( θ ) = O ( | θ | ) is a bounded continuous function. Finally for the Hilbert transform on ∂ D we can write H [ f ] ³ e i θ ´ = 1 4 π π Z − π f ³ e i t ´ cot µ θ − t 2 ¶ d t = 1 4 π π Z − π f ³ e i t ´ 2 θ − t d t + 1 4 π π Z − π f ³ e i t ´ E ( θ − t ) d t . (A.7) The first integral above is singular at t = θ and the second is bounded and easy to estimate. Usually we write for the kernel of Hilbert transform cot µ θ 2 ¶ ≈ 2 θ − t , (A.8) by simply ignoring the trivial error term. Finally in ( A.7 ) we have defined the Hilbert transform for the boundary of unit disk. Hilbert transform for a unit disk relates harmonic conjugates of a periodic function f defined over ∂ D . In the fol- lowign we briefly outline how to obtain harmonic conjugate for a function defined over R ⊂ C . The unit disk D can be conformally mapped to the upper half-plane U = { ζ ∈ C : ℑ ( ζ ) > 0 } by the Möbius map [ Krantz, 2009 ] c : D → U , ζ 7→ i · 1 − ζ 1 + ζ . Since the conformal map of a harmonic function is harmonic, we can carry also P oisson kernel to the upper half-plane [ Titc hmarsh et al., 1948 ]. The P oisson inte- gral equation for U will be u ( x + i y ) = ∞ Z −∞ P ( x − t , y ) f ( t ) d t , y > 0 , (A.9) 41 with the P oisson kernel given by P ( x , y ) = 1 π · y x 2 + y 2 . (A.10) The harmonic conjugate may be obtained from f by taking convolution with the conjugate kernel Q ( x , y ) = 1 π · x x 2 + y 2 . (A.11) The Cauchy kernel is related to P and Q by the relation i π z = P ( x , y ) + i Q ( x , y ). Finally we are able to construct the harmonic conjugate on the boudary ∂ U = R u † ( x , y ) = 1 π ∞ Z −∞ f ( t ) x − t ( x − t ) 2 + y 2 d t y → 0 + − − − − → 1 π ∞ Z −∞ f ( t ) 1 x − t d t . (A.12) B Cauchy formula by Ketchum and Vladimirov W e briefly describe the setting and the resulting Cauchy formula given in [ K etchum, 1928 ] and [ Vladimirov and V olovic h, 1984b ]. First let us take a bounded region G ⊆ C with piecewise smooth boundary ∂ G . Second let us consider the mapping of G given by l : w 7→ a + b w with a , b ∈ S d onto the plane C = { z : z = a + b w , w ∈ S d ( C ) } ⊂ S d ( C ), where S d ( C ) gives a complexification of S d , i.e. we replace real coefficients with complex in ( 4.8 ). G is mapped to L and ∂ G is mapped to ∂ L corre- spondingly . Suppose also that the function f ( z ) is differentiable [ Vladimirov and V olovich, 1984a ] in some neighbourhood O of the closure ¯ L = L ∪ ∂ L and b is an invertible element of S d ( C ). Then in the plane C we have the following Cauchy formula 1 2 π i Z ∂ L f ( ζ ) ζ − z d ζ = ( f ( z ) if z ∈ L , 0 if z ∈ C \ ¯ L . (B .1) As it was outlined in Appendix A the Cauchy formula plays a vital role in the definition of Hilbert transform and one can directly extend the Hilbert transform and define it in the unit open disk (upper half-plane) of C . Remark B.1 ([ Vladimirov and V olovich, 1984b ]) . The Cauchy formula ( B .1 ) holds for real Banach algebra S d in which there exists an element i 2 = − ² , where ² is the unit element in S d . The plane C consists of the elements C = { x : x = a + u ² + v i , u , v ∈ R } , a ∈ S d . (B .2) The Cauchy formula for several hypercomplex variables is written similarly [ Vladimirov and V olovich, 1984b ]. Now we have the region L = L 1 × · · · × L d , where L j = { z j = a j + b j w j } is compact in some open region. By the Hartogs’s theorem we have that if the function of several variables f ( z 1 , . . . , z d ) is analytic with respect 42 to each variable in G 1 × · · · × G d , then it is analytic in G 1 × · · · × G d and we have the general Cauchy formula f ( z 1 , ..., z d ) = 1 (2 π i ) d Z ∂ L 1 ... Z ∂ L d f ( ζ 1 , ..., ζ d ) ( ζ 1 − z 1 ) · ... · ( ζ d − z d ) d ζ 1 . . . ζ d (B .3) for all z ∈ L . References [SKE, 2017] (2017). “Sketching the History of Hypercomplex Numbers“ . [Alfsmann et al., 2007] Alfsmann, D ., Göckler , H. G ., Sangwine , S . J ., and Ell, T . A. (2007). Hypercomplex algebras in digital signal processing: Benefits and draw- backs . In Signal Processing Conference , 2007 15th European , pages 1322–1326. IEEE. [Bahri et al., 2008] Bahri, M., Hitzer , E. S ., Hayashi, A., and Ashino, R. (2008). An uncertainty principle for quaternion fourier transform. Computer s & Math- ematics with Applications , 56(9):2398–2410. [Bedrosian, 1962] Bedrosian, E. (1962). A product theorem for Hilbert transforms . [Bernstein, 2014] Bernstein, S . (2014). The fractional monogenic signal. In Hyper - complex Analysis: New P erspectives and Applications , pages 75–88. Springer . [Bernstein et al., 2013] Bernstein, S ., Bouchot, J .-L., Reinhardt, M., and Heise, B . (2013). Generalized analytic signals in image processing: comparison, theory and applications . In Quaternion and Clifford F ourier T ransforms and W avelets , pages 221–246. Springer . [Bihan and Sangwine, 2010] Bihan, N . L. and Sangwine, S . J . (2010). The hyper- analytic signal. arXiv preprint . [Brackx et al., 2006] Brackx, F ., De Schepper , N ., and Sommen, F . (2006). The two-dimensional Clifford-F ourier transform. J ournal of mathematical Imaging and V ision , 26(1-2):5–18. [Bridge, 2017] Bridge , C . P . (2017). Introduction to the monogenic signal. arXiv preprint arXiv:1703.09199 . [Bülow and Sommer , 2001] Bülow , T . and Sommer , G . (2001). Hypercomplex signals-a novel extension of the analytic signal to the multidimensional case. IEEE T ransactions on signal processing , 49(11):2844–2852. [Catoni et al., 2008] Catoni, F ., Boccaletti, D ., Cannata, R., Catoni, V ., Nichelatti, E., and Zampetti, P . (2008). The mathematics of Minkowski space-time: with an introduction to commutative hypercomplex numbers . Springer Science & Busi- ness Media. 43 [Chung , 1997] Chung , F . R. (1997). Spectral graph theory . American Mathemati- cal Soc. [Clifford, 1871] Clifford (1871). Preliminary sketch of biquaternions . Proceedings of the London Mathematical Society , s1-4(1):381–395. [Cockle , 1849] Cockle , J . (1849). III. on a new imaginary in algebra. Philosophical Magazine Series 3 , 34(226):37–47. [Coifman and Lafon, 2006] Coifman, R. R. and Lafon, S . (2006). Diffusion maps. Applied and computational harmonic analysis , 21(1):5–30. [Coifman et al., 2005] Coifman, R. R., Lafon, S., Lee, A. B ., Maggioni, M., Nadler , B ., W arner , F ., and Zucker , S . W . (2005). Geometric diffusions as a tool for har - monic analysis and structure definition of data: Diffusion maps. Proceedings of the National Academy of Sciences of the United States of America , 102(21):7426– 7431. [De Bie, 2012] De Bie, H. (2012). Clifford algebras, F ourier transforms , and quan- tum mechanics. Mathematical Methods in the Applied Sciences , 35(18):2198– 2228. [De Bie et al., 2011] De Bie, H., De Schepper , N ., and Sommen, F . (2011). The class of Clifford-F ourier transforms. J ournal of F ourier Analysis and Applications , 17(6):1198–1231. [Ell, 1992] Ell, T . A. (1992). Hypercomplex spectral transformations, phd disser - tation. [Ell et al., 2014] Ell, T . A., Le Bihan, N ., and Sangwine, S . J . (2014). Quaternion F ourier transforms for signal and image processing . J ohn Wiley & Sons . [Ell and Sangwine, 2007] Ell, T . A. and Sangwine, S. J . (2007). Hypercomplex fourier transforms of color images. IEEE T ransactions on image processing , 16(1):22–35. [F elsberg et al., 2001] F elsberg, M., Bülow , T ., Sommer , G., and Chernov , V . M. (2001). F ast algorithms of hypercomplex F ourier transforms . In Geometric com- puting with Clifford algebras , pages 231–254. Springer . [F elsberg and Sommer , 2001] F elsberg, M. and Sommer , G . (2001). The monogenic signal. IEEE T ransactions on Signal Processing , 49(12):3136–3144. [Flamant et al., 2017] Flamant, J ., Chainais, P ., and Le Bihan, N . (2017). P olar - ization spectrogram of bivariate signals. In Acoustics , Speech and Signal Pro- cessing (ICASSP), 2017 IEEE International Conference on , pages 3989–3993. IEEE. [Flandrin, 1998] Flandrin, P . (1998). Time-frequency/time-scale analysis , vol- ume 10. Academic press . 44 [Gabor , 1946] Gabor , D . (1946). Theory of communication. J ournal of the Insti- tution of Electrical Engineers-P art III: Radio and Communication Engineering , 93(26):429–441. [Gong and Gong , 2007] Gong , S. and Gong, Y . (2007). Concise Complex Analysis: Revised . W orld Scientific Publishing Company . [Greene and Krantz, 2006] Greene, R. E. and Krantz, S. G. (2006). Function the- ory of one complex variable , volume 40. American Mathematical Soc. [Hahn and Snopek, 2011] Hahn, S . and Snopek, K. (2011). The unified theory of n- dimensional complex and hypercomplex analytic signals. Bulletin of the P olish Academy of Sciences: T ec hnical Sciences , 59(2):167–181. [Hahn and Snopek, 2013] Hahn, S . and Snopek, K. (2013). Quasi-analytic mul- tidimensional signals . Bulletin of the P olish Academy of Sciences: T echnical Sciences , 61(4):1017–1024. [Hahn and Snopek, 2016] Hahn, S . L. and Snopek, K. M. (2016). Complex and Hypercomplex Analytic Signals: Theory and Applications . Artech House . [Hamilton, 1844] Hamilton, W . R. (1844). Ii. on quaternions; or on a new system of imaginaries in algebra. Philosophical Magazine Series 3 , 25(163):10–13. [Hilbert, 1912] Hilbert, D . (1912). Grundzuge einer allgemeinen T heorie der lin- earen Integralgleichungen . [Huo et al., 2007] Huo, X., Ni, X., and Smith, A. K. (2007). A survey of manifold- based learning methods . Recent advances in data mining of enterprise data , pages 691–745. [Ketchum, 1928] Ketchum, P . (1928). Analytic functions of hypercomplex vari- ables . T ransactions of the American Mathematical Society , 30(4):641–667. [Kodaira, 2006] K odaira, K. (2006). Complex manifolds and deformation of com- plex structures . Springer . [Krantz, 2001] Krantz, S. G . (2001). Function theory of several complex variables , volume 340. American Mathematical Soc. [Krantz, 2009] Krantz, S . G . (2009). Explorations in harmonic analysis: with ap- plications to complex function theory and the Heisenberg group . Springer Sci- ence & Business Media. [Le Bihan, 2017] Le Bihan, N . (2017). F oreword to the special issue “Hypercom- plex Signal Processing”. Signal Processing , 136:1–106. [Le Bihan and Sangwine, 2008] Le Bihan, N . and Sangwine, S . (2008). The H- analytic signal. In 16th European Signal Processing Conference (EUSIPCO- 2008) , pages P8–1. 45 [Le Bihan et al., 2014] Le Bihan, N ., Sangwine, S . J ., and Ell, T . A. (2014). Instan- taneous frequency and amplitude of orthocomplex modulated signals based on quaternion fourier transform. Signal Processing , 94:308–318. [Lee, 2001] Lee , J . M. (2001). Introduction to smooth manifolds. [Maw ardi and Hitzer , 2006] Maw ardi, B . and Hitzer , E. M. (2006). Clifford- F ourier transformation and uncertainty principle for the Clifford geometric al- gebra C l 3,0 . Advances in applied Clifford algebras , 16(1):41–61. [Munkres , 2018] Munkres , J . R. (2018). Analysis on manifolds . CRC Press . [P andey , 2011] P andey , J . N . (2011). The Hilbert transform of Schwar tz distribu- tions and applications , volume 27. J ohn Wiley & Sons. [P edersen, 1997] Pedersen, P . S. (1997). Cauchy’ s integral theorem on a finitely generated, real, commutative, and associative algebra. Advances in mathemat- ics , 131(2):344–356. [Ricci, 2004] Ricci, F . (2004). Hardy Spaces in One Complex V ariable . Lecture Course, A vailable at the webpage of F . Ricci. [Sangwine and Le Bihan, 2007] Sangwine, S . J . and Le Bihan, N . (2007). Hyper - complex analytic signals: extension of the analytic signal concept to complex signals . In Signal Processing Conference , 2007 15th European , pages 621–624. IEEE. [Scheffers , 1893] Scheffers, G . (1893). Sur la généralisation des fonctions analy- tiques . CR Acad. Sc , 116:1114. [Strichartz, 2003] Strichartz, R. S . (2003). A guide to distribution theory and F ourier transforms . W orld Scientific Publishing Company . [Titchmarsh et al., 1948] Titchmarsh, E. C . et al. (1948). Introduction to the theory of F ourier integrals , volume 2. Clarendon Press Oxford. [V akman and V ainshtein, 1977] V akman, D. and V ainshtein, L. (1977). Ampli- tude, phase, frequency—fundamental concepts of oscillation theory . Sov . Phys . Usp . 20(12) . [Vladimirov and V olovich, 1984a] Vladimirov , V . S . and V olovich, I. V . (1984a). Su- peranalysis . I. Differential calculus. T heoretical and Mathematical Physics , 59(1):317–335. [Vladimirov and V olovich, 1984b] Vladimirov , V . S . and V olovich, I. V . (1984b). Superanalysis . II. Integral calculus. Theoretical and Mathematical Physics , 60(2):743–765. [Y u et al., 2008] Y u, B ., Zhang , H., et al. (2008). The Bedrosian identity and homo- geneous semi-convolution equations. J . Integral Equations Appl , 20(4):527–568. 46 [Zhang , 2014] Zhang , H. (2014). Multidimensional analytic signals and the Bedrosian identity . Integral Equations and Operator Theory , 78(3):301–321. 47
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment