Control of Battery Storage Systems for the Simultaneous Provision of Multiple Services
In this paper, we propose a control framework for a battery energy storage system to provide simultaneously multiple services to the electrical grid. The objective is to maximise the battery exploitation from these services in the presence of uncerta…
Authors: Emil Namor, Fabrizio Sossan, Rachid Cherkaoui
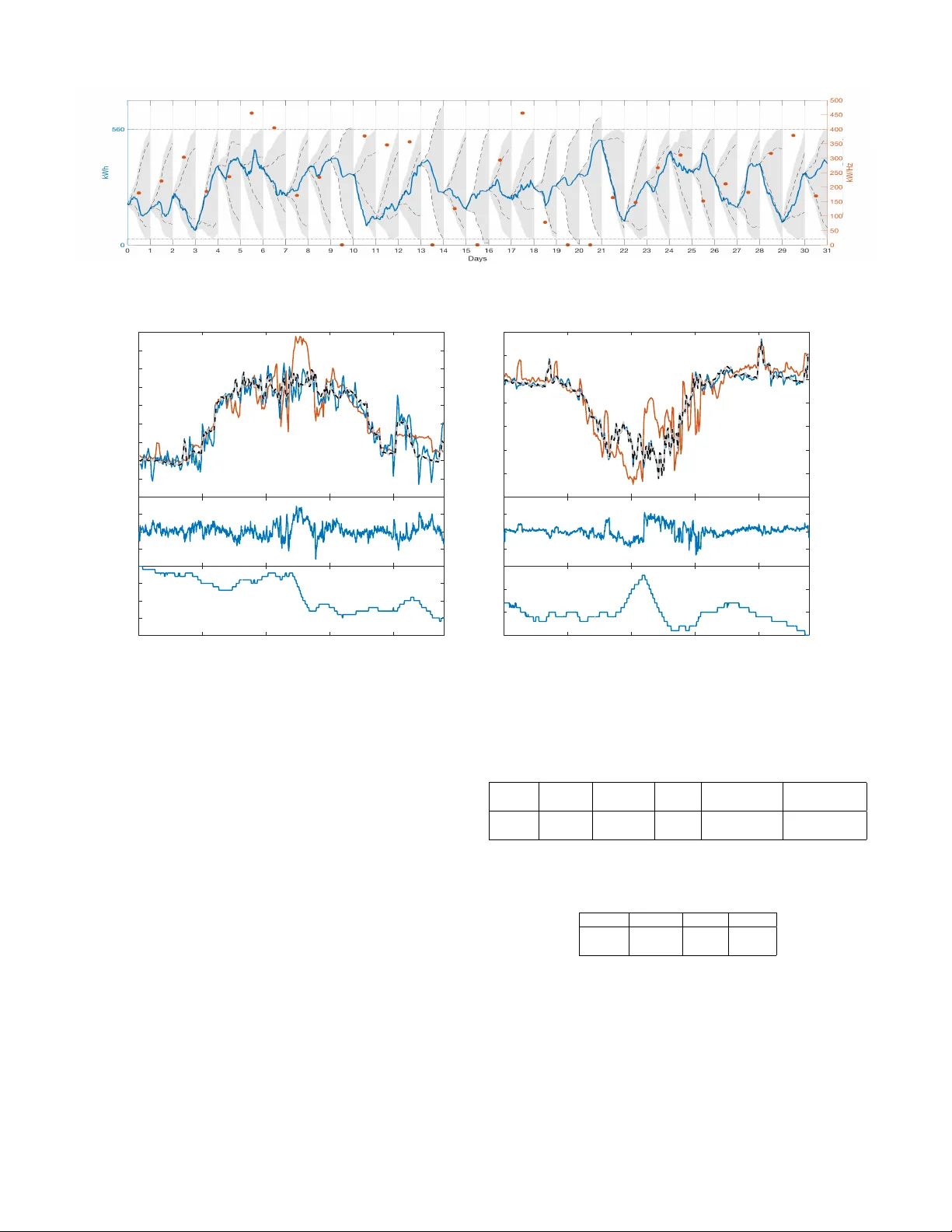
1 Control of Battery Storage Systems for the Simultaneous Pro vision of Multiple Services Emil Namor , Student Member , IEEE , Fabrizio Sossan, Member , IEEE , Rachid Cherkaoui, Senior Member , IEEE , Mario Paolone, Senior Member , IEEE . Abstract —In this paper , we propose a control framework for a battery ener gy storage system to provide simultaneously multiple services to the electrical grid. The objective is to maximise the battery exploitation from these services in the presence of uncertainty (load, stochastic distrib uted generation, grid fr equency). The framework is structured in two phases. In a period-ahead phase, we solve an optimization problem that allocates the battery power and energy budgets to the different services. In the subsequent r eal-time phase the contr ol set-points for the deployment of such services are calculated separately and superimposed. The control framework is first formulated in a general way and then casted in the problem of providing dispatchability of a medium voltage feeder in conjunction to primary frequency control. The performance of the proposed framework are validated by simulations and real-scale experi- ments, performed with a grid-connected 560 kWh/720 kV A Li-ion battery energy storage system. I . I N T R O D U C T I O N A. Motivations Battery energy storage systems (BESSs) are a promising technology due to their inherent distributed nature, their ability to inject bidirectional po wer flows, their high power ramping and ability to provide a set of dif ferent grid services. As of today , BESSs are being deployed to provide sev eral different services, such as peak shaving [1], energy management of microgrids [2] and stochastic resources [3], [4] and frequency and voltage re gulation [5], [6]. Such deployment is still slowed down by the high cost of these devices. While this cost is decreasing due to technological developments and economies of scale, a viable approach to optimize the exploitation of such devices is the de velopment of control strategies able to provide simultaneously more than one of the services listed abov e. This allo ws for a better exploitation of the BESS from a technical and economical point of view . More specifically , the simultaneous provision of multiple services via BESSs is of interest with respect to two aspects. First, dif ferent applications have different energy and power requirements. Some are “energy intensive”, i.e. they need a large amount of energy but low instanteous power (e.g. peak shaving). Other are “power intensiv e”, i.e. require higher lev els of power but not high amount of energy (e.g. primary frequency The authors are with the Distributed Electrical Systems Laboratory , ´ Ecole Polytechnique F ´ ed ´ erale de Lausanne, Switzerland (EPFL), e-mail: { emil.namor , fabrizio.sossan, rachid.cherkaoui, mario.paolone } @epfl.ch. This work was supported in part by the Swiss Competence Center for Energy Research and in part by the European Union’ s Horizon 2020 research and innov ation program under agreement no. 773406. regulation) [7]. Such different services could be coupled to match at best the energy and power ratings of the batteries. Second, batteries are normally sized to provide a single service continuously . Howe v er , the actual daily deployment of power and exploitation of energy capacity vary due to the uncertainty of the stochastic resources to which they are coupled (e.g. uncontrollable loads and PV generation in [3]), or of the pricing signals that they track (e.g. energy and balancing power prices in [8]). Therefore, the deployment of such services rarely requires the exploitation of the whole BESS capacity . When a portion of the BESS energy capacity remains unexploited by the deployment of its main service, it could be allocated to a secondary service, to be deployed in parallel. In other words, coupling multiple services together may allo w to exploit at best the batteries coupled with stochastic resources. B. Literatur e Survey The rele vance of application sinergies for energy storage devices has been pointed out in general terms in [9]. Sev eral works, in the existing technical literature, propose approaches to provide simultaneously multiple grid services and demon- strate their ef fectiv eness by simulations [8], [10]–[20]. These references dif fer from each other for the kind of services they provide and how they account for BESS operational constraints. BESS services can be classified in 3 mainstream categories: 1) energy arbitrage (EA), i.e. buying and selling electricity to generate a rev enue; 2) provision of ancillary services (AS). These are a set of services that batteries can provide to grid operators to enhance the system reliability (e.g. frequency response and regulation). The provision of these services is nor- mally regulated by auction based systems and markets; 3) achie vement of control objectiv es for the local grid (i.e. local objectiv es (LO) ), like congestion manage- ment, voltage regulation at L V and MV level or self- consumption. The applications described in [8], [10]–[20] are designed to provide combinations of the aforementioned services, as summarized in T able I. In such references, operation scheduling problems for en- ergy storage systems considering multiple services are for- mulated. These aim at maximising the economic rev enue generated for a standalone storage systems e xploiting multiple rev enue streams. This objectiv e is sought in dif ferent pricing 2 T able I R E C E N T LI T E R AT U R E O N C L U S T E R I N G OF BE S S AP P L I C ATI O N S I N P O W E R S Y S T E M S Services provided References EA + AS [8], [10]–[14] LO + AS [15]–[17] LO + EA + AS [18]–[20] contexts and the common result is that by jointly providing multiple services, the BESS economic income is increased. Nonetheless, energy storage systems are often used in two further configurations [12]: i) used by system operators to improv e system reliability (e.g. [21], [22]) or ii) in conjunc- tion with other resources such as distrib uted generation [23], flexible demand [24] or electric vehicles [25]. Besides the objecti ve of the proposed scheduling problems, the references listed in T able I focus on different aspects of the control framew ork needed to provide multiple services si- multaneously . Se veral references propose specific methods for storage technologies other than BESSs: compressed air energy storage [13], fleets of thermostatically controlled loads [16], or fleets of distributed BESSs [15]. References [16] and [17], besides the formulation of the scheduling problem, describe the real-time control to implement the proposed strategies. References [11], [12], [17] propose a robust optimization approach to deal with uncertainties related to price signals and reserve deployment. Finally [11] analyses how providing multiple services simultaneously affects the BESS life time. C. P aper’ s contributions W e consider the case of a BESS installed in a distribu- tion feeder supplying uncontrollable loads and integrating a considerable amount of distributed generation. The scheduling problem of such BESS consists in allocating portions of its power and energy capacity to achiev e different technical objectiv es, such as the dispatch of the acti ve power demand of the feeder and the provision of primary frequency regu- lation po wer to the upper grid layer . Although the proposed framew ork can be adapted to maximise the re venue coming from providing dif ference ancillary services in a price-taking setting (as sho wn in Appendix A), it is formulated with the objectiv e of maximising the capacity of providing ancillary services. The reason for this is that the price taking assumption is not scalable with the number of units participating in the markets. In other words, if many units were to participate in the ancillary services market, an open-loop price signal would not be representati ve of their aggregated reaction. Recent works in [26] and [27] addresses the problem of decision making for battery systems in a price-setting conte xt, b ut the y solely focus on ener gy arbitrage, whereas we consider multiple simultaneous services. Specifically , we focus on the problem of jointly dispatching the operation of an activ e distribution feeder and provide primary frequency regulation. W e provide first a formulation of a general control framew ork for the provision of multiple simultaneous grid services via BESSs, i.e. a formulation that is agnostic to the services that are provided. This solution does not require coordination mechanisms with ot her resources or with the upper grid layer nor an extensi ve communication infrastructure and can be considered as a bottom-up approach to augment the ability of BESSs to provide useful services to the grid. The proposed control has two time layers: (i) a period-ahead and (ii) a real-time one. In the first, we solve an optimization problem that allocates a power and an energy budgets to each considered service. This is done to maximize the exploitation of the BESS energy capacity and ensure continuous operation by managing the BESS stored energy . In the real-time stage, the power setpoints needed for each service are computed independently and superimposed. Based on such general framework, we describe then a BESS control scheme for dispatching the operation of a distribution feeder , such as in [3] and for primary frequenc y regulation. W e show the performance of this control both in simulations and via experimental results obtained by implementing the proposed framew ork to control a grid-connected 560 kWh/720kV A BESS. The contributions of the paper , with respect to the existing literature are: • the formulation of a complete algorithmic toolchain to control a BESS in order to provide multiple services simultaneously . This framework differs from the e xisting literature in: i) the generic formulation of the schedul- ing problem, ii) the technical rather than re venue-dri ven control objectiv e, iii) the consideration of the stochastic behaviour of the services deployment (due to the uncer- tainties in the forecast of the feeder prosumption as well as in the energy needed to perform PFR) and exploitation of robust optimization techniques to hedge against uncer - tainty and achie ve reliable real-time operation (similarly to [12]). • the formulation of a control strategy to manage a BESS connected within a MV feeder, together with a set of heterogeneous resources (loads and PV generations), in order to dispatch the operation of the same feeder and exploit the remaining capacity to provide PFR. • the experimental validation of the proposed control tool- chain, providing solid empirical e vidences on the appli- cability , actionability , and performance of the proposed scheduling and control algorithms. In the best of the Authors knowledge, this is the first work providing such experimental validation for a BESS control scheme con- sidering multiple simultaneous services. The paper is organised as follows. Section II proposes the general formulation of the control problem of providing multiple services simultaneously via a BESS. Section III casts the proposed framework in the specific context of the provision of po wer for dispatching the operation of an activ e distribution feeder and for primary frequenc y re gulation (PFR). Section IV presents results, obtained both via simulations and experiments, that validates the proposed frame work. Finally , Section V summarizes the original contrib utions and main outcomes of the paper and proposes directions for further research. 3 I I . P R O B L E M F O R M U L A T I O N W e consider the problem of scheduling the operation of a BESS with energy capacity E nom and maximum power P max , for a time window T . During each time window , the BESS provides J services, each denoted by the subscript j = 1 , . . . , J . Each service j is characterized by an energy budget E j and a power budget P j . These are the shares of the BESS energy capacity and power necessary along the time windo w T to deploy the service j . The power and energy budgets P j and E j necessary for each service are functions of a set of tunable control parameters (composing the decision vector of the scheduling problem and hereafter denoted by x ) as well as of v ariables modelling the uncertainty of the operating conditions related to each service (hereafter θ ). The dependency of P j and E j on θ is introduced to account for the fact that the deployment of the considered services need to be ensured in the occurrence of any scenario of their power demand (practical examples are provided in Section III). W e formulate an optimization problem to determine the value of decision vector x (and hence the power and energy budgets P j and E j for j = 1 , . . . , J ) that maximizes the portion of BESS ener gy capacity made a vailable for the provision of the services in J . W e discretize the window of duration T in N time steps of duration T / N , each denoted by the subscript k , with k = 1 , . . . , N . Formally , the power budget of the service j at time step k is denoted P j,k and is defined as the interval of the expected power v alues that the service could require at k . These are between the minimum and maximum expected po wer realizations for that service, namely in the interval P j,k = h P ↓ j,k , P ↑ j,k i . The power budget along a time period T is defined as the sequence of such intervals: P j = nh P ↓ j,k ( x, θ ) , P ↑ j,k ( x, θ ) i , k = 1 , . . . , N o . (1) Similarly , the application will require an energy budget E j = { h E ↓ j,k ( x, θ ) , E ↑ j,k ( x, θ ) i , k = 1 , . . . , N } . (2) An example of energy and power budets is reported in Fig. 1. The set of widths of such energy budget trajectory is defined as: w ( E j ( x, θ )) = { E ↑ j,k ( x, θ ) − E ↓ j,k ( x, θ ) , k = 1 , . . . , N } . (3) Moreov er , we define the operation of sum of budgets of different services (using energy budget as e xample) as 1 : X j E j ( x, θ ) = = J X j =1 E ↓ j,k ( x, θ ) , X j E ↑ j,k ( x, θ ) , k = 1 , . . . , N . (4) The problem of providing multiple concurrent services with a BESS, while ensuring feasible operation can no w be formu- lated in generic terms. W e seek to maximise the set of widths of the energy budget resulting from the sum of the energy 1 Eq. (4) can be interpreted as the computation of the overall energy budget within T required by all services J . -20 0 20 kW -20 0 20 kWh (a) (b) Figure 1. Example of (a) power and (b) ener gy budgets for a service j . budgets E j with j = 1 , . . . , J , within a giv en time windo w T , while respecting the BESS power and ener gy capabilities. The resulting decision problem is: x o = arg max x w J X j =1 E j ( x, θ ) (5) subject to: E init + J X j =1 E j ( x, θ ) ∈ [ E min , E max ] (6) J X j =1 P j ( x, θ ) ∈ [ − P max , P max ] (7) It is worth noting that it is possible to have a different objec- tiv e function while exploiting the same framew ork presented here. In Appendix A, two variations seeking respectiv ely the maximisation of the economical re venue and simple feasibility of operation are shown. I I I . C O N C U R R E N T D I S PA T C H O F A M V D I S T R I B U T I O N F E E D E R A N D P R I M A RY F R E Q U E N C Y C O N T R O L The scheme proposed in Section II is now applied to control a BESS to dispatch of a MV distribution feeder and to provide PFR to the grid. W e hav e observed that the battery capacity needed to dispatch a MV feeder as in [3] depends on the un- certainty of the forecast of the connected stochastic resources (loads and stochastic distributed generation). Whereas in some cases the battery capacity is barely sufficient to achieve this goal, in others a considerable portion of the battery capacity remains unutilized when the uncertainty of the prosumption forecast is small. The choice of PFR as a second stacked service is because i) large ramping duties of BESSs accomodate the increased demand for fast regulating po wer in po wer systems with a high penetration of production from renew ables and ii) PFR is a “po wer intensive” application and is well-suited to be coupled with the dispatch service, which is instead “energy intensiv e”. 4 T ransmission grid P k B k L k BESS Activ e MV feeder Figure 2. Schematic of the experimental setup. The notation of the power flows refers to the real-time control described in section III-B. A. Day-ahead problem formulation W e want to operate a grid-connected BESS to dispatch the activ e po wer flow of a MV distribution system with hetero- geneous resources, as in [3], while providing also primary frequency regulation to the grid. Figure 2 shows the main features of this setup. The operation is performed over a T=24 hour period and planned every day for the next calendar day . Follo wing the formulation presented in Section II, we first define the power and energy budgets for the dispatch and PFR, namely P D , P F R , E D and E F R . Based on these budgets, we formulate an optimization problem as in (5)-(7). 1) P ower and ener gy b udgets: The dispatch service requires the battery to compensate for the mismatch between the aggre- gated prosumers power flo w (denoted by L k = L 1 , . . . , L N ) and a pre-established dispatch plan ˆ P k = ˆ P 1 , . . . , ˆ P N , defined at 5-minutes resolution. The dispatch plan is the sum of two terms: the forecasted po wer profile of the feeder prosumption, ˆ L = ˆ L 1 , . . . , ˆ L N and an of fset po wer profile, F = F 1 , . . . , F N , computed to keep the BESS stored ener gy within proper limits: ˆ P k = ˆ L k + F k for k = 1 , . . . , N (8) W e obtain, with a forecasting tool from the literature [3], the daily forecasted profile of the feeder prosumption as well as the deviations from the forecasted profile in the highest and lowest demand scenarios, denoted by L ↑ = L ↑ 1 , . . . , L ↑ N and L ↓ = L ↓ 1 , . . . , L ↓ N . The maximum positi ve and negati v e BESS power requirements for the dispatch service are therefore defined as the sum ov er k of the of fset po wer F k and of L ↑ k and L ↓ k , respectiv ely . With respect to the general definitions of x and θ giv en Section II, the terms L ↑ k and L ↓ k are input quantities (i.e. { L ↑ , L ↓ } are in θ ) whereas the offset po wer F is a decision variable, determined by the optimization problem defined hereafter (i.e. F is in x ). The power budget is therefore defined as: P D = { h P ↓ D,k ( x, θ ) , P ↑ D,k ( x, θ ) i , k = 1 , . . . , N } = { h F k + L ↓ k , F k + L ↑ k i , k = 1 , . . . , N } (9) The associated energy budget is: E D = { h E ↓ D,k ( x, θ ) , E ↑ D,k ( x, θ ) i , k = 1 , . . . , N } = " T N k X i =1 ( F i + L ↓ i ) , T N k X i =1 ( F i + L ↑ i ) # (10) with k = 1 , . . . , N . The primary frequency regulation service requires the bat- tery to provide a power proportional to the deviation of the frequency from its nominal v alue ∆ f k = f k − f n [28], with a proportionality coefficient hereafter denoted by α : P F R,k = α ∆ f k = α ( f k − f n ) . (11) The unit of measurement of α is kW/Hz. The instantaneous re- quested power cannot be forecasted since frequency deviations are difficult to predict. Therefore, the power budget required by this application will correspond to a constant profile, equal to the maximum po wer that frequency regulation may require. Since grid codes typically require complete acti v ation of primary reserves for frequency deviations of more than ∆ f max = 200 mHz [28], the power budget can be defined as: P F R = { h P ↓ F R,k ( x, θ ) , P ↑ F R,k ( x, θ ) i , k = 1 , . . . , N } = [ − 0 . 2 α · 1 , 0 . 2 α · 1 ] (12) Where 1 is the all-one vector of length N . The energy budget necessary to ensure feasible operation for this service within a giv en time interv al can be inferred statistically . In particular, we examined grid frequency data of the European grid from the last 2 years. Data have been collected by a PMU-based metering system installed on the EPFL campus [29]. Since frequency regulation requires the injection of a power P k = α ∆ f k , the energy required by the grid during a giv en time window T is: E F R,k = T N k X i =0 P F R,i = T N k X i =0 ( α ∆ f i ) = α T N k X i =0 ∆ f i ! = αW f ,k (13) for k = 1 , . . . , N and where W f ,k denotes the integral of frequency de viations over a period of time and it is to be interpreted as the energy content of the signal given by the frequency deviation from its nominal v alue. The upper and lower bounds for W f ,k for k = 1 , . . . , N can be inferred from a statistical analysis of historical frequency de viation time- series (reported in Appendix B). These are defined hereafter as W ↑ f = W ↑ f , 1 , . . . , W ↑ f ,N and W ↓ f = W ↓ f , 1 , . . . , W ↓ f ,N . W ith regard to the general definitions of x and θ given in Section II, the terms W ↑ k , W ↓ k (as well as ∆ f max in (12)) are input quantities (i.e. { W ↑ , W ↓ , ∆ f max } are in θ ) whereas α is a decision variable, determined by the optimization problem defined hereafter (i.e. α is in x ). The energy budget for frequency regulation is then defined as: E F R = { h E ↓ F R,k ( x, θ ) , E ↑ F R,k ( x, θ ) i , k = 1 , . . . , N } = { h αW ↓ f ,k , αW ↑ f ,k i , k = 1 , . . . , N } (14) 2) Decision problem formulation: relying on the defi- nitions given in Section II, it is x = [ α, F ] and θ = 5 [∆ f max , W ↓ f , W ↑ f , L ↓ , L ↑ ] and the objecti ve function in (5), corresponds therefore to: w X j E j = w ( E D + E F R ) = T N k X i =0 ( F i + L ↑ i ) + αW ↑ f ,k ! + − T N k X i =0 ( F i + L ↓ i ) + αW ↓ f ,k ! = T N k X i =0 ( L ↑ i ) − T N k X i =0 ( L ↓ i ) ! + α W ↑ f ,k − W ↓ f ,k with k = 1 , . . . , N . (15) Since α is the only control v ariable in the expression abov e, the objective to maximize w P j E j in (5) reduces to max- imizing α , subject to (6)(7). The problem (5)-(7) is as: [ α o , F o ] = arg max α ∈ R + , F ∈ R N ( α ) (16) subject to: E init + E D ( x, θ ) + E F R ( x, θ ) ∈ [ E min , E max ] (17) P D ( x, θ ) + P F R ( x, θ ) ∈ [ − P max , P max ] (18) By expressing explicitly the dependency of the power and energy budgets on the parameters and control variables, the problem (16)-(18) becomes: [ α o , F o ] = arg max α ∈ R + , F ∈ R N ( α ) (19) subject to: E init + T N k X i =1 F i + L ↑ i + αW ↑ f ,k ≤ E max (20) E init + T N k X i =1 F i + L ↓ i + αW ↓ f ,k ≥ E min (21) F k + L ↑ k + 0 . 2 α ≥ P max (22) F k + L ↓ k + 0 . 2 α ≥ − P max (23) with k = 1 , . . . , N . 3) Determination of E min to include the BESS ef ficiency: The notion of battery round-trip efficienc y is incorporated in the decision problem (19)-(23) with an empirical two-stage ap- proach by enforcing conservati ve limits for the battery stored energy . This process is explained in the following. First, the problem (19)-(23) is solved implementing the nominal battery state-of-energy limits (i.e. E max = E nom and E min = 0 ). Second, the following finite impulse response model [3], [30]: E k = E 0 + T N k X i =1 η i B i , η i = ( β B i ≥ 0 1 /β B i < 0 , (24) where B i is the total power injected or absorbed by the BESS at time i and η i the BESS efficienc y , is used to model the stored energy E k of a non ideal BESS for the set of simulation scenarios presented in Section IV -A. The + + + − α o Eqs. 18,19 ˆ P k P 1 ,...,k − 1 B f r, 1 ,...,k − 1 B d,k B k f k ∆ f k f 0 B f r,k Figure 3. Scheme of the BESS real-time control energy stored at the end of each day in a BESS modeled as ideal ( η = 1 ) and non ideal ( η = 0 . 96 2 ) are compared and the largest difference over the all set of simulations is used to impose a conservati ve bound to the minimum stored energy constraint (21). For example, in the case proposed in Section IV -A, the largest dif ference is 4% of E nom , therefore we adopt E min = 0 . 05 E nom . It is worth noting that this approach allows to define the energy budgets independently for each service and sum them as in (15). In other words, it achie ves a separation of concerns between services, which can be designed independently from each other and stacked together at the end of the process. Also, it is worth noting that the round-trip efficiency of modern Li-ion based BESS is generally above 90% [31]–[33]. An accurate in vestig ation of the modelling errors, considering also less efficient storage technologies (like fuel cells), is postponed to future works. B. Real-time control The proposed algorithm consists in solving a planning problem for the next calendar day of operation, determining the values of the coefficient α o and of the offset profile F o and in a real-time control problem. The latter is not the main contribution of the present work, howe ver it is summarized hereafter and illustrated in Figure 3 for the sake of clarity . The real-time control determines the battery activ e po wer setpoint B k with 1-second resolution. In the following, the index k denotes the 1-second resolution time interval. B k is the algebraic sum of the setpoints B d,k and B f r,k determined respectiv ely for the dispatch and the PFR by two independent control loops: B k = B d,k + B f r,k . (25) The power setpoint B d,k is to compensate the tracking error k , which is the dif ference between the objectve feeder power ˆ P k (from the dispatch plan, with 5 minutes resolution) and the mean deviation from this value within the 5 minutes interval. This deviation is the sum of two terms. The first is the mean of the feeder power measurements P i in the instants from the beginning of the current 5-minutes period and present, filtered out of the power requests due to the PFR, B f r,i . The second 2 the value of η = 0 . 96 has been determined experimentally for the 560 kWh/720 kV A BESS used in this work. 6 is a short-term forecast of the load ˆ L i ov er the remaining fi ve minutes interval: k = ˆ P k − 1 300 k − 1 X i =0 ( P i − B f r,i ) + 5 min X i = k ˆ L i ! . (26) The expression abo ve is an energy objective over a 5 minutes horizon and the po wer setpoint to respect it is therefore defined as: B d,k = 1 300 − k · k . (27) The power setpoint for the frequency regulation B f r,k is calulated as: B f r,k = α o · ( f k − f n ) . (28) In order to comply with the constraints imposed by the day- ahead policy , both setpoints are constrained within saturation tresholds, which are, notably , equal to ± 0 . 2 α o for B f r,k and ± ( P max − 0 . 2 α o ) for B d,k . The latter threshold is set such that the dispatch can require, istantaneously , all the power not reserved by the frequency regulation. It remains, nevertheless, that the dispatch power averaged ov er a 5 minutes period is expected to remain between L ↑ + F o or L ↓ + F o . I V . R E S U LT S The proposed planning and control strategy has been vali- dated by simulations and experiments in a real-life grid. The goal of this validation effort is double. The simulations demonstrate the effecti veness of the proposed control archi- tecture in the determination of the coefficient α o and of the offset profile F o . The values found for such quantities allow to maximise the battery exploitation, while respecting the battery operational limits and therefore allowing for the continuous operation for a month. The experimental results v alidate the assumptions made in the control design and in the simulations and demonstrate the practical relev ance and deployability of the proposed control architecture. Both simulations and experiments are based on a setup with a 560 kWh/720 kV A Lithium-ion BESS installed at the EPFL campus in Lausanne, Switzerland, and connected to a 20 kV medium v oltage feeder . The feeder interfaces 5 of fice b uildings (300 kW global peak demand) and rooftop PV installations (90 kWp). Both historical data used in the simulations and real-time measurements of the power flows and grid frequency are obtained via a PMU-based metering system [29]. A. Simulations Thirty-one consecuti ve days of operation are simulated. These 31 days are characterised by different initial SOE values 3 , ranging from 12% to 90%, and determined by the operation of the previous days (the first day of the simulation the initial SOE has been set to 35%). Figure 4 reports the profile of the energy stored the bat- tery along the 31 days and the daily energy budget for the dispatching service E D and the total daily energy budget 3 The SOE is here defined as the amount of stored energy normalized over the BESS nominal energy capacity E nom . T able II S I M U L AT I O N R E S U LT S S O E 0 α o F avg S O E min | T S O E max | T [%] [kW/Hz] [kW] [%] [%] Mean 50.8 216.6 0.5 37.4 64.9 Max 90.3 455.7 10.0 61.6 90.7 Min 12.5 0.0 -9.3 12.4 36.0 ( E D + E F R ), calculated as a function the stochastic forecast- ing model of the demand and frequency (i.e. on the basis of [ L ↑ , L ↓ , W ↑ f , W ↓ f ] ). Figure 4 shows as well the values assumed daily by α o . It can be observed that the total daily energy budgets (grey areas) hit the BESS operational limits (SOE=5% and SOE=100%) in all days except for day 10, 14, 16, 20 and 21. This denotes that the day-ahead planning problem is able to schedule efficiently the offset profile F o and the value α o to exploit the full battery energy capacity accounting for the stochastic behaviour of frequency and demand. On the other hand, in the fi ve days mentioned above, the grey area exceeds the SOE limits. This is because the uncertainity related to the demand (reflected by the sequences L ↑ and L ↓ ) prevents the feasibility of problem (16)-(18). In such days, the solution of (16)-(18) provides an α o equal to zero, i.e. no frequency regulation is performed. In all cases, the activ ated constraint in the solution of (16)-(18) has been the one on the energy budget sum. Quantitativ e results from the simulations are collected in T able II: S O E 0 is the daily initial SOE in percentage, α o the daily coefficient for PFR in kW/Hz, F av g the mean value of the offset profile and ∆ S O E the overall SOE variation during the day due to the simultaneous deployment of the two services. T able II shows the a verage, maximum and minimum values of such quantities ov er the 31 days simulation period. The a verage daily value of α o is of 216.6 kW/Hz. This corre- sponds to the provision of up to 43 kW for PFR (considering ∆ f max = 200 mHz). In comparison to the work by the same Authors in [3], where the control of the BESS aims exclusi v ely at dispatching the operation of a MV feeder , we are able to provide power both for the dispatch and for PFR, while still ensuring the respect of the BESS operational constraints. This is done by taking advantage of the BESS capacity that remains unexploited by the dispatching operation, due to the daily variation of the uncertainty set of the prosumption defined by h L ↓ k , L ↑ k i for k = 1 , . . . , N . The black dashed lines in Figure 4 delimit the energy budget reserved to the dispatching service E D . The width of this b udget in days characterized by low uncertainty in the feeder prosumption forecast (e.g. days 5 or 17) is rather narrow and the unexploited battery capacity is therefore allocated to provide PFR (a high value of α o is found). In days in which such uncertainty is high (e.g. days 18 to 20) almost all (or more than all) the battery capacity is needed to perform the dispatch, resulting in a very wide E D and in a very low value of α o . B. Experimental validation The described algorithm has been implemented in the controller of the 560 kWh/720 kV A Lithium-ion BESS. The 7 Figure 4. Simulation results of 31 consecutiv e days of operation. Blue line: BESS stored energy; Grey area: total daily energy budget E D + E F R ; Black dashed lines: bounds of the daily energy budget reserved to the dispatching service E D ; red dots: daily values of α o (referred to the right-hand y-axis). 80 100 120 140 160 180 200 220 240 260 kW -100 -50 0 50 100 kW 0 5 10 15 20 20 25 30 35 40 % 20 40 60 80 100 120 140 160 kW -100 -50 0 50 100 kW 0 5 10 15 20 40 45 50 55 % Figure 5. Experimental results, left: day 1, right: day 2. Upper plots - feeder po wer profiles. Thick grey line: dispatch plan, red line: feeder prosumption, dashed black line: feeder real power (excluded the PFR power injection), blue line: feeder real power (with the PFR). Middle plots - BESS power injection. Lower plots - BESS SOE evolution. results of 2 days of experiments are reported in this section. Figure 5 sho ws the po wer and SOE profiles for two days of operation, an intra-week day and a weekend day (hereafter referred to as Day 1 and Day 2). Numerical results are summarized in T able III and T able IV. In Day 1, the day- ahead optimization procedure has determined a value of α o of 584 kW/Hz and an offset power of 0.84 kW on average. In Day 2, the α o has been found equal to 127 kW/Hz and the av erage offset po wer equal to -0.56 kW . These values of α o allow to exploit a portion of the battery capacity that would remain unexploited when providing power only to dispatch the operation of the MV feeder, as in [3]. In this case, the maximum amplitude of the energy budget that needs to be reserved for the dispatch, calculated as in (10) on the basis of the upper and lower worst case scenarios of the feeder prosumption ( L ↓ k and L ↑ k , with k = 1 , . . . , N ), is of about the 54% of the BESS nominal capacity for Day 1 and of about the 10% for Day 2. The remaining capacity is fully exploited by the PFR application, thanks to the computation of a proper value of α o , by means of (16)-(18). T able IV collects the relev ant metrics to ev aluate the performance of the dispatch application when performed in conjunction with frequency re gulation, i.e. the mean, RMS and T able III E X P E R I M E N TAL R E S U LT S S O E 0 α o F avg S O E min | T S O E max | T [%] [kW/Hz] [kW] [%] [%] Day 1 40 584 0.84 24 40 Day 2 47 127 -0.56 40 53 T able IV D I S PA T C H P E R F O R M A N C E M E T R I C S ( I N K W ) mean rms max Day 1 -0.03 0.52 4.45 Day 2 0.02 0.5 6.83 maximum absolute values of the tracking error in these two days. The RMS v alue of the tracking error is about 0.5 kW ov er a feeder prosumption of about 130 kW on average. W e note that, in both these two days, the energy demand for the two applications has been of opposite sign. For istance, in Day 1 the daily energy requested for the dispatch operation is of about 89 kWh, whereas the average power requested for the frequency regulation is of − 24 kWh. The simultaneous deployment of these two services in this case generates a 8 SOE drift that is lo wer than the one the dispatch alone would generate. It is worth noting that, when simultaneously providing multiple services, the saturation (or depletion) of the battery energy capacity would occur only if the power requests of all services corresponded to the upper (or lo wer) bounds of their budgets. If the uncertain processes related to the services are uncorrelated, as in the case of the dispatch and frequency regulation, the occurrence of this condition is reduced. Providing multiple services simultaneously , in this regard, may ensure more reliable operation, in the sense that failure due to complete depletion or saturation of the battery capacity would be less likely to occur . The downside of this is of course that an ev entual failure would be more deleterious since multiple services would stop at once. This could be addressed by implementing strategies to prioritize the services in contingency situations, e.g. by selecting, before hitting the operational limits, which service is to drop and which to maintain. V . C O N C L U S I O N W e have proposed an algorithm to schedule and control the operation of a battery energy storage system to provide multiple services simultaneously . Its objectiv e is maximising the battery capacity exploitation in the presence of v ariable and stochastic energy and power requirements. The proposed control consists in two phases. First, in the operation-scheduling phase the portion of battery power and energy capability to be allocated for each service is determined. This is accomplished by an optimization that tak es into account the uncertainty in the forecasted po wer and ener gy requirements of each service. Second, in the real-time phase the different services are deployed by injecting in the grid a real power corresponding to the sum of the power setpoints of the individual services. The algorithm is first formulated in generic terms and then casted to the case of pro viding BESS power to simultaneously dispatch the activ e power flow of a distribution network and provide primary frequency regulation to the grid. For these two services the power and energy budgets are modelled in the planning problem by predictions deli vered by forecasting tools. The solution of the operation-scheduling optimization problem provide, on a daily basis, the maximum value of the PFR regulating power that can be deployed while respecting the battery operational constraints. It provides moreover the offset profile, i.e. the po wer needed, on a daily basis to restore the stored energy to a lev el that ensures continuous operation. The proposed control scheme is validated by simulations and experimentally . Simulations are obtained by applying the proposed scheme to a set of load and frequency data measured on-site and corresponding to one month of operation. Simula- tion results show that the proposed scheme does ensure con- tinuous operation and does determine the maximum possible frequency regulating power that can be provided in conjunc- tion to the dispatch application. Experiments are performed on a real-life grid by using a grid-connected 560 kWh/720 kV A lithium titanate BESS, connected to a medium voltage grid interfacing a set of of fice buildings and PV generating units. Results from 2 days of operations are sho wn and demonstrate the deployability of the proposed control scheme. In these two days of operation, a regulating power up to 117 and 25 kW respectiv ely can be provided on top of the dispatch operation. The latter is performed with a RMS tracking error of about 0.5 kW . Future works concern the development of contingenc y strategies to prioritize the services if the battery reaches its operational limits and an ev aluation of the proposed control scheme applied to time horizons of different duration (e.g. intra-day , hourly operation). A P P E N D I X A E C O N O M I C O P T I M I Z A T I O N A N D F E A S I B I L I T Y P R O B L E M S The objecti ve of the cost function (5) is maximising the battery ener gy capacity exploited during a period of operation T . The same framework can be exploited to optimise the BESS operation considering different objectiv es. For instance, one could seek the value of x that maximises the economical benefit of providing multiple concurrent services via an op- timization function such as: x o = arg max x X r j (29) subject to (6), (7) and: r j = f j ( E j , P j ) (30) where r j is the re venue that the application j can generate in period T , and is a function of the ener gy and power budgets reserved for that service. Similarly , if the objectiv e is simply to find a value for x that ensures feasible operation, one could write: x o = arg max x 1 (31) subject to (6) (7). A P P E N D I X B C O M P U TA T I O N O F B E S S E N E R G Y N E E D S F O R P F R The terms W ↓ f and W ↑ f are computed on the basis of a statistical analysis of past data from the last two years of frequency deviations and assuming that the BESS under control does not influence the future frequency deviation. First, the daily profiles composed by W f = W f , 1 , . . . , W f ,N hav e been calculated from hystorical data, by integrating the frequency deviations measured in a set of 24 h periods. The mean µ W,k and variance σ 2 W,k of such values have then been computed for all k = 1 , . . . , N . It can be observ ed that the set of W f ,k values is close to normally distributed for any instant k . A Chi-square goodness-of-fit test on the dataset does in fact not reject the null hypothesis at the 5% significance lev el. In Fig. 6, it is shown that the normal probability plot of the values assumed W f ,k for k = N (i.e. at the end of the 24 hours). W e then define W ↑ f ,k and W ↓ f ,k for all k as a function of the mean value µ W,k and the standard deviation σ W,k as W ↑ f ,k = µ W,k + 1 . 96 σ W,k W ↓ f ,k = µ W,k − 1 . 96 σ W,k , for k = 1 , . . . , N (32) 9 -1500 -1000 -500 0 500 1000 1500 2000 Data 0.001 0.003 0.01 0.02 0.05 0.10 0.25 0.50 0.75 0.90 0.95 0.98 0.99 0.997 0.999 Probability Normal Probability Plot Figure 6. Normal probability plot of W f ,N . to hav e a 95% confidence lev el that the realization of W f ,k will lie between W ↑ f ,k and W ↓ f ,k . Similarly , we can define W ↑ f ,k and W ↓ f ,k for any other confidence level. R E F E R E N C E S [1] A. Oudalov , R. Cherkaoui, and A. Be guin, “Sizing and optimal operation of battery energy storage system for peak shaving application, ” in P ower T ech, 2007 IEEE Lausanne . IEEE, 2007, pp. 621–625. [2] B. Belv edere, M. Bianchi, A. Borghetti, C. A. Nucci, M. Paolone, and A. Peretto, “ A microcontroller-based power management system for standalone microgrids with hybrid po wer supply , ” IEEE Tr ansactions on Sustainable Energy , vol. 3, no. 3, pp. 422–431, 2012. [3] F . Sossan, E. Namor , R. Cherkaoui, and M. Paolone, “ Achie ving the dispatchability of distribution feeders through prosumers data driv en forecasting and model predicti ve control of electrochemical storage, ” IEEE T ransactions on Sustainable Energy , vol. 7, no. 4, pp. 1762–1777, 2016. [4] X. Ke, N. Lu, and C. Jin, “Control and size energy storage systems for managing energy imbalance of variable generation resources, ” IEEE T ransactions on Sustainable Ener gy , vol. 6, no. 1, pp. 70–78, 2015. [5] K. Christakou, D.-C. T omozei, M. Bahramipanah, J.-Y . Le Boudec, and M. Paolone, “Primary voltage control in active distribution networks via broadcast signals: The case of distributed storage, ” IEEE T ransactions on Smart Grid , vol. 5, no. 5, pp. 2314–2325, 2014. [6] A. Oudalov , D. Chartouni, and C. Ohler , “Optimizing a battery energy storage system for primary frequency control, ” IEEE Tr ansactions on P ower Systems , vol. 22, no. 3, pp. 1259–1266, 2007. [7] E. Hittinger, J. Whitacre, and J. Apt, “What properties of grid energy storage are most v aluable?” J ournal of P ower Sources , vol. 206, pp. 436–449, 2012. [8] D. W u, C. Jin, P . Balducci, and M. Kintner-Me yer , “ An energy stor- age assessment: Using optimal control strategies to capture multiple services, ” in P ower & Ener gy Society General Meeting, 2015 IEEE . IEEE, 2015, pp. 1–5. [9] J. Eyer and G. Corey , “Energy storage for the electricity grid: Benefits and market potential assessment guide, ” Sandia National Laboratories , vol. 20, no. 10, p. 5, 2010. [10] B. W aso wicz, S. Koopmann, T . Dederichs, A. Schnettler , and U. Spaetling, “Evaluating regulatory and market frameworks for energy storage deployment in electricity grids with high rene wable energy penetration, ” in Eur opean Ener gy Market (EEM), 2012 9th International Confer ence on the . IEEE, 2012, pp. 1–8. [11] M. Kazemi and H. Zareipour, “Long-term scheduling of battery storage systems in energy and regulation markets considering batterys lifespan, ” IEEE Tr ansactions on Smart Grid , 2017. [12] M. Kazemi, H. Zareipour, N. Amjady , W . D. Rosehart, and M. Ehsan, “Operation scheduling of battery storage systems in joint energy and ancillary services markets, ” IEEE T ransactions on Sustainable Energy , 2017. [13] E. Drury , P . Denholm, and R. Sioshansi, “The value of compressed air energy storage in energy and reserve markets, ” Energy , vol. 36, no. 8, pp. 4959–4973, 2011. [14] B. Cheng and W . Powell, “Co-optimizing battery storage for the frequency regulation and energy arbitrage using multi-scale dynamic programming, ” IEEE T ransactions on Smart Grid , 2016. [15] O. M ´ egel, J. L. Mathieu, and G. Andersson, “Scheduling distributed energy storage units to provide multiple services under forecast error , ” International Journal of Electrical P ower & Energy Systems , vol. 72, pp. 48–57, 2015. [16] E. Vrettos and G. Andersson, “Combined load frequency control and activ e distribution network management with thermostatically controlled loads, ” in Smart Grid Communications (SmartGridComm), 2013 IEEE International Conference on . IEEE, 2013, pp. 247–252. [17] Y . Shi, B. Xu, D. W ang, and B. Zhang, “Using battery storage for peak sha ving and frequenc y regulation: Joint optimization for superlinear gains, ” arXiv pr eprint arXiv:1702.08065 , 2017. [18] X. Xi, R. Sioshansi, and V . Marano, “ A stochastic dynamic program- ming model for co-optimization of distributed energy storage, ” Energy Systems , vol. 5, no. 3, pp. 475–505, 2014. [19] R. Moreno, R. Moreira, and G. Strbac, “ A milp model for optimising multi-service portfolios of distributed energy storage, ” Applied Ener gy , vol. 137, pp. 554–566, 2015. [20] A. Perez, R. Moreno, R. Moreira, M. Orchard, and G. Strbac, “Effect of battery degradation on multi-service portfolios of energy storage, ” IEEE T ransactions on Sustainable Energy , vol. 7, no. 4, pp. 1718–1729, 2016. [21] M. Nick, R. Cherkaoui, and M. Paolone, “Optimal allocation of dis- persed energy storage systems in active distribution networks for energy balance and grid support, ” IEEE T ransactions on P ower Systems , vol. 29, no. 5, pp. 2300–2310, 2014. [22] H. Zhao, Q. Wu, S. Hu, H. Xu, and C. N. Rasmussen, “Revie w of energy storage system for wind power inte gration support, ” Applied Ener gy , v ol. 137, pp. 545–553, 2015. [23] H. Akhav an-Hejazi and H. Mohsenian-Rad, “Optimal operation of independent storage systems in energy and reserve markets with high wind penetration, ” IEEE T ransactions on Smart Grid , vol. 5, no. 2, pp. 1088–1097, 2014. [24] F . Brahman, M. Honarmand, and S. Jadid, “Optimal electrical and thermal energy management of a residential energy hub, integrating demand response and energy storage system, ” Energy and Buildings , vol. 90, pp. 65–75, 2015. [25] S. Shafiee, M. F otuhi-Firuzabad, and M. Rastegar , “Impacts of controlled and uncontrolled phev charging on distribution systems, ” 2012. [26] H. Mohsenian-Rad, “Coordinated price-maker operation of large energy storage units in nodal energy markets, ” IEEE Tr ansactions on P ower Systems , vol. 31, no. 1, pp. 786–797, 2016. [27] ——, “Optimal bidding, scheduling, and deployment of battery systems in california day-ahead energy market, ” IEEE Tr ansactions on P ower Systems , vol. 31, no. 1, pp. 442–453, 2016. [28] B. Xu, A. Oudalov , J. Poland, A. Ulbig, and G. Andersson, “Bess control strategies for participating in grid frequency regulation, ” IF A C Pr oceedings V olumes , vol. 47, no. 3, pp. 4024–4029, 2014. [29] M. Pignati, M. Popovic, S. Barreto, R. Cherkaoui, G. D. Flores, J.-Y . Le Boudec, M. Mohiuddin, M. Paolone, P . Romano, S. Sarri et al. , “Real-time state estimation of the epfl-campus medium-voltage grid by using pmus, ” in Innovative Smart Grid T ec hnologies Conference (ISGT), 2015 IEEE P ower & Energy Society . IEEE, 2015, pp. 1–5. [30] P . Fortenbacher , A. Ulbig, and G. Andersson, “Optimal placement and sizing of distributed battery storage in low voltage grids using receding horizon control strategies, ” IEEE T ransactions on P ower Systems , 2017. [31] H. Qian, J. Zhang, J.-S. Lai, and W . Y u, “ A high-efficiency grid-tie battery energy storage system, ” IEEE transactions on power electr onics , vol. 26, no. 3, pp. 886–896, 2011. [32] A. Castillo and D. F . Gayme, “Grid-scale energy storage applications in renewable energy integration: A survey , ” Energy Conversion and Management , vol. 87, pp. 885–894, 2014. [33] P . F ortenbacher, J. L. Mathieu, and G. Andersson, “Modeling, identifi- cation, and optimal control of batteries for power system applications, ” in P ower Systems Computation Conference (PSCC), 2014 . IEEE, 2014, pp. 1–7. Emil Namor received the M.Sc. in electrical engineering from the Univ ersity of Padov a, Italy , and the M.Sc. in engineering from the Ecole Centrale 10 de Lille in 2014. Since 2015, he is enrolled as a Ph.D. student at the Distributed Electrical Systems Laboratory at EPFL, Switzerland. His main research interest are modeling and control of battery storage systems. Fabrizio Sossan is an Italian citizen and was born in Genov a in 1985. He got his M.Sc. in Computer Engineering from the University of Genova in 2010, and, in 2014, the Ph.D. in Electrical Engineering from DTU, Denmark. Since 2015, he is a postdoctoral fellow at the Distributed Electrical Systems Laboratory at EPFL, Switzerland. In 2017, he has been a visiting scholar at NREL, Colorado, US. His main research interest are modeling and optimization applied to power system. Rachid Cherkaoui (M05SM07) recei ved the M.Sc. and Ph.D. degrees in elec- trical engineering from the cole Polytechnique Fdrale de Lausanne (EPFL), Lausanne, Switzerland, in 1983 and 1992, respectively . He is currently a Senior Scientist with EPFL, leading the Power Systems Group. He has authored or co-authored over 100 scientific publications. His current research interests include electricity market deregulation, distributed generation and storage, and power system vulnerability mitigation. Dr . Cherkaoui was a member of CIGRE TF and WG. He is a member of technical program committees of v arious conferences. He was the IEEE Swiss Chapter Officer from 2005 to 2011. Mario Paolone (M07-SM10) receiv ed the M.Sc. (with Hons.) and Ph.D. degrees in electrical engineering from the University of Bologna, Bologna, Italy , in 1998 and 2002, respecti vely . In 2005, he was appointed as an Assistant Professor in power systems with the University of Bologna, where he was with the Po wer Systems Laboratory until 2011. In 2010, he received the Associate Professor eligibility from the Polytechnic of Milan, Italy . Since 2011, he joined the Swiss Federal Institute of T echnology , Lausanne, Switzerland, where he is currently Full Professor, Chair of the Distributed Electrical Systems Laboratory , and Head of the Swiss Competence Center for Energy Research Future Swiss Electrical infrastructure. He has authored or co-authored over 230 scientific papers published in revie wed journals and international conferences. His current research interests include power systems with particular reference to real-time monitoring and operation, po wer system protections, power systems dynamics, and power system transients. Dr . Paolone was the Co-Chairperson of the T echnical Program Committees of the 9th edition of the International Conference of Power Systems Transients (2009) and the 2016 Power Systems Computation Conference. He is the Chair of the T echnical Program Committee of the 2018 Power Systems Computation Conference. In 2013, he was a recipient of the IEEE EMC Society T echnical Achievement A w ard. He has co-authored several papers that receiv ed the following awards: the Best IEEE Trans. on Electromagnetic Compatibility Paper A ward in 2017, the Best Paper A ward at the 13th International Conference on Probabilistic Methods Applied to Power Systems, Durham, U.K., in 2014, the Basil Papadias Best Paper A w ard at the 2013 IEEE PowerT ech, Grenoble, France, and the Best Paper A ward at the International Univ ersities Power Engineering Conference in 2008. He is the Editor-in-Chief of the journal Sustainable Energy , Grids and Networks (Elsevier) and an Associate Editor of the IEEE Trans. on Industrial Informatics.
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment