Computing optimal shortcuts for networks
We study augmenting a plane Euclidean network with a segment, called a shortcut, to minimize the largest distance between any two points along the edges of the resulting network. Problems of this type have received considerable attention recently, mostly for discrete variants of the problem. We consider a fully continuous setting, where the problem of computing distances and placing a shortcut is much harder as all points on the network, instead of only the vertices, must be taken into account. We present the first results on the computation of optimal shortcuts for general networks in this model: a polynomial time algorithm and a discretization of the problem that leads to an approximation algorithm. We also improve the general method for networks that are paths, restricted to two types of shortcuts: those with a fixed orientation and simple shortcuts.
💡 Research Summary
The paper addresses the problem of improving the diameter of a planar Euclidean network by inserting a single straight‑line segment, called a shortcut. Unlike most previous work that restricts the added edge to connect two existing vertices (the discrete setting), this study works in a fully continuous model where the endpoints of the shortcut may lie anywhere on the edges of the network. Consequently, the distance function becomes more intricate because every point on the network, not just the vertices, must be considered when measuring the longest shortest‑path distance (the continuous diameter).
Two insertion models are distinguished: the “highway model,” where a shortcut can be entered or exited only at its endpoints, and the “planar model,” where every crossing between the shortcut and existing edges creates a new vertex that can be used by paths. The authors focus on the planar model, which is more general and applicable to real‑world road or pedestrian networks, but also more challenging because the shortcut may be used only partially and the set of diametral pairs can change in non‑intuitive ways.
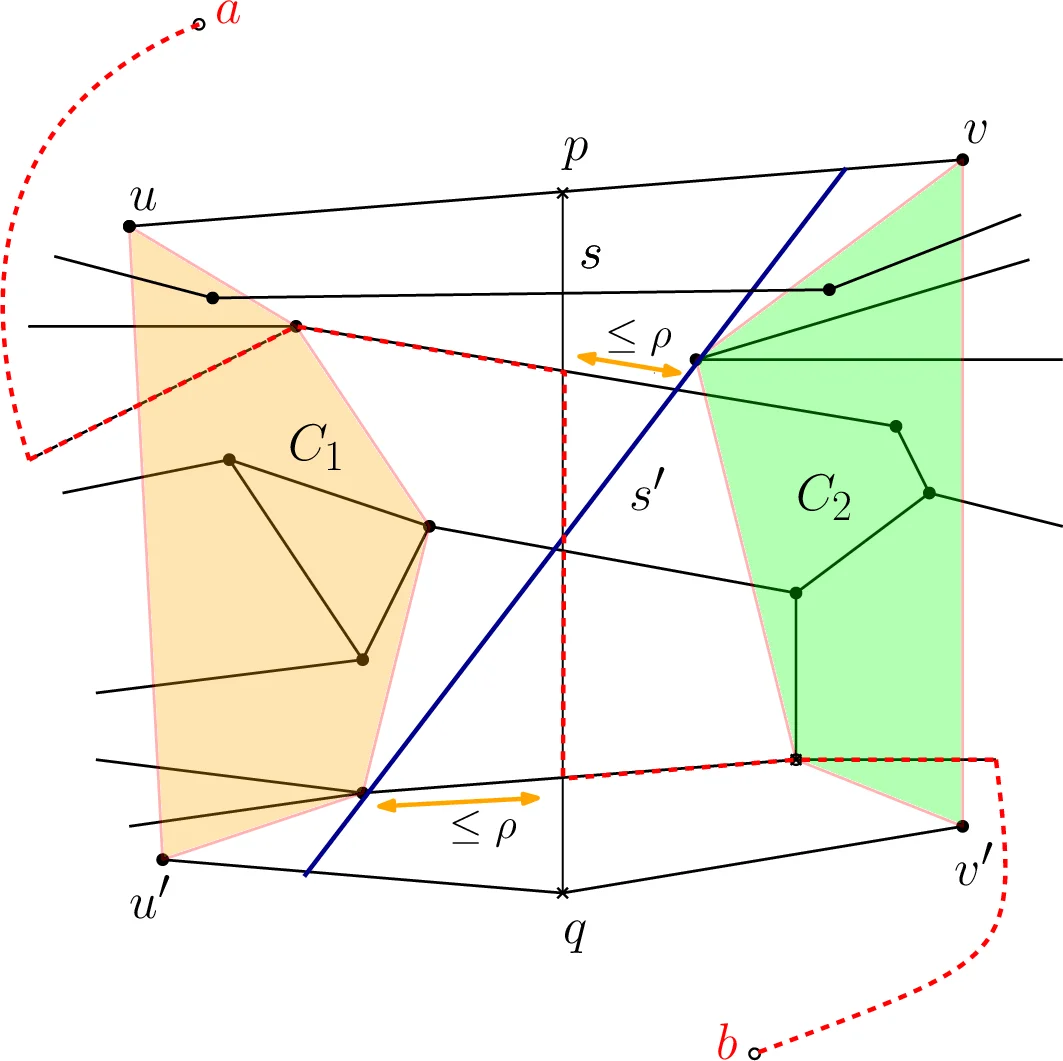
The main theoretical contribution is a polynomial‑time algorithm that computes an optimal shortcut for any planar Euclidean network, if one exists. The algorithm proceeds by partitioning the space of possible shortcut lines into O(n⁴) “hourglass” regions, each defined by a pair of intersected edges. Within a region, the distance contributed by any candidate shortcut can be expressed as a linear function f₍w,z₎^{α,β}(a,b) of the line’s intercept b (the slope a is fixed for the region). Lemma 1 proves this linearity by invoking the Side Splitter Theorem. For each fixed diametral pair (α,β) – which may be vertex‑vertex, vertex‑edge, or edge‑edge – and for each choice of endpoint vertices w and z on the intersected edges, the function f captures the sum of distances from α to w, the segment of the shortcut between the two intersection points, and from the second intersection point to β. Because these functions are linear, the maximum distance over all diametral pairs reduces to the upper envelope of a set of lines, which can be evaluated by checking only the region’s boundary (O(n) vertices). Computing all necessary distances once (quadratic time) and then evaluating the O(n⁶) functions per region yields an overall running time of O(n¹⁰). Although high, this bound demonstrates that the problem is solvable in polynomial time and that an exact optimal shortcut can be found.
Given the prohibitive O(n¹⁰) runtime, the authors also propose a discretization approach that leads to a faster approximation algorithm. The natural discretization – considering only segments joining two vertices – can be arbitrarily bad (Figure 4a). A better candidate set consists of maximal extensions of such segments (the longest segment containing a given candidate that still has both endpoints on the network). For paths, Yang
Comments & Academic Discussion
Loading comments...
Leave a Comment