A Driver Behavior Modeling Structure Based on Non-parametric Bayesian Stochastic Hybrid Architecture
Heterogeneous nature of the vehicular networks, which results from the co-existence of human-driven, semi-automated, and fully autonomous vehicles, is a challenging phenomenon toward the realization of the intelligent transportation systems with an a…
Authors: Hossein Nourkhiz Mahjoub, Behrad Toghi, Yaser P. Fallah
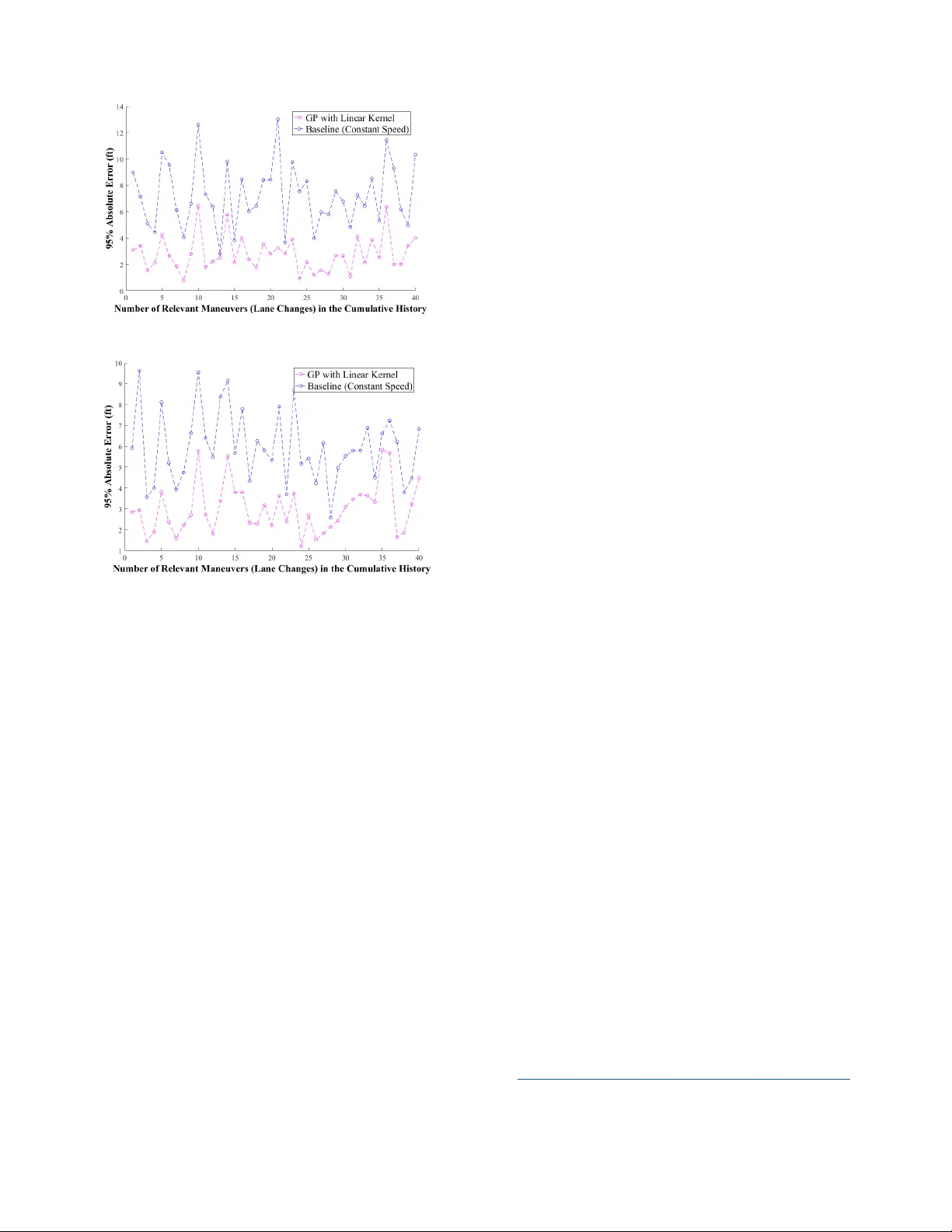
This work has been accep ted in 201 8 IEEE Co nnected and Automated Vehicles Symposium (CAVS 2018 ) 27 August 20 18, Chicago, U SA IEEE Co pyright Notice: © 201 8 IEEE. Perso nal use of this material i s per mi tted. P ermission from IEEE must be ob tained for all other uses, in any c urrent or future media, including rep rinting/republi shing this mater ial for adver tising or pro motional purposes, creating ne w collective works, for r esale or red istribution to servers o r lists, or re use of any cop yrighted co mponent of this work in other works. A Driver Be havior Mo deling Str ucture Ba sed on Non- parametri c Bayesian Stochas tic Hybrid Arc hitecture Hossein Nou rkhiz Mahjoub Networked Systems Lab ECE Department University of Central Flo rida Orlando, FL, US hnmahjoub@knights. ucf.edu Behrad Toghi Networked Systems Lab ECE Department University of Central Flo rida Orlando, FL, US toghi@knights.ucf.edu Yaser P. Fall ah Networked Systems Lab ECE Department University of Central Flo rida Orlando, FL, US yaser.fallah@ucf.edu Abstract —Heterogeneous nature of the vehicular netw orks, which results from the co-ex istence of human-driven, semi- automated, and fully autonomous vehicles, is a challenging phenomenon toward the realization of the intelligent transportation systems with an acc eptable level of sa fety, comfort, and efficiency. Safety applications highly suffer fro m communication resource limitations, specifically in dense and congested vehicular netw orks. The idea of model-based communication (MBC) has b een recently pr oposed to add ress this issue. In this work, we propo se Gaussian Process based Stochastic Hybrid System with Cum ulative Relevant History (CRH-GP- SHS) fra me wor k , w hich is a hiera rchical stochastic hybrid modeling structure, built upon a non-parametric Bay esian inference method, i.e. Gaussi an processes. This framewor k is proposed in order to be em ployed w ithin the MBC c ontext to jointly mode l driver/vehicle behavior as a stochastic object. Non- parametric Bayesian methods relieve the limitations i mposed by non-evolutionary model structures and e nable t he proposed framework to properly ca pture different stochastic be haviors. The performance o f the proposed CRH-GP-SHS fra mework at the inter-mode lev el has been evaluated over a set of realistic lane change maneuvers from NGSIM -US101 dataset. The re s ults show a n oticeable performance i mprovement for GP in comparison to the baseline c onstant s peed model, sp ecifically in critical situations such as highly congested netw ork s. M oreove r, a n augmented model has a lso been p roposed which is a composition of GP and constant speed models and capable of capturing the driver behavior under various netw ork reliability conditions. Keywords— Vehicular Ad-hoc Networks, Model-based Communication, St ochastic Hy brid Sy stems, Non-parametric Bayesian Inference, Gaussian Processes I. I NTRODUCTIO N Individual vehicular netw o rk a gents are antici pated to perform wiser cooperativ e decisi ons if they continu ously be acquainted w ith either the exact or the most probabl e acti o ns of other agents within a time horizon ahead. This imperative notion, wh ic h is usually r eferred to as situational awa ren e ss in the context o f vehicula r netw o rks, is mainly achieved by the virtue o f sensory inform a tion, ca p tured locally th rough sensors such as radar, LiDAR , or c amera, along with the commu nicate d information betw e en th e n e tw ork elem e nts. Communication- driven po r tion of the situati onal awareness data is crucial d ue to the inherent restrictions of sensory informati o n, such as obstacle blocking or e nvir o nm ental issues ( fog, r ain, d imn e ss, etc .). However, th e lim ited communicati o n bandwidth of the currently available vehicular communicati o n standards, such as Dedicated Short Range Commun ic ation ( DSRC) [1], stron gly motivates the d evelo pment of optimized schem es for disseminating critical informati o n a mong vehicles within a certain required vicinity . The m ini mum req uire d robust communication range is mainly forced by the applic ation layer . More specifically , cooperativ e safety applications, such as Forward Collision Warning/Avoidan ce (FCW/A) [2]-[4], Cooperative Adaptive Cruise Control (CACC) [5], Lane-Keep- Assistance (LKA ) [6], etc., wh ic h are sup posed to employ th e achieved situati o nal awareness to make proper safety and efficiency decisions, play the m ain role to determ ine this ran ge. According to techni ca l documents from National Highway Traffic Safety Adminis tr ation (NHTSA), 300m distance is considered as the m inimum require d range f or a generic V2V communication standard, suc h as DSRC [7]. Therefore, the bandwidth limitation challenge with in this proximit y should be appropriately handled to guarantee the robust reception o f neighboring v ehicles’ information. Several DSRC-based congestion cont r ol m ethods have b een proposed in the lit erature [8]-[16] a im to optimize the Basic Safety Message (BSM) fo r mation and communication strategy through continuous acclimation of d iffer ent flexible DSRC standard parameters, such a s transmission p ower, rate, and message content, to the network conditions . The communication channel utilizati o n efficien c y has been not ably improved u sing aforementione d adaptive m echanisms and some of them, such as [16 ], have b een selected as the core congestion control algorithm s of the SAE J29 45/1 standard [17]. However, all the se mechanism s are de velo p ed assum ing the fact that the broad cast message should be finally fill e d b y raw informati on, directly sourced from CAN- b us and GPS. An in no vative idea has been recently proposed in [18] and more investigat ed in [19] a s the model-base d communication (MBC) which proposes a new design perspect ive to be utili zed for the DSRC co nges tion control p roblem. T his methodology proposes to replace the mix e d vehicle/driver behavi or with an abstract description (model) an d then s hare the models an d their updates over the network instead of directly comm unicating raw dynamic inform atio n. Since this approach shifts the paradigm and changes the solution do main from any schem e of raw data communication to model based information netw o rking, it This material is based on w ork su ppor ted by the National Science Foundation under CA R EER Grant 1664968. seems very p romising to w a rds a notable enhancement in channel ut ilization performance. The o ther signif icant advanta ge of MBC method o logy agains t r aw data com munication schemes, in addition to its poten tia lly higher channel utili zation capability , is it s capability to subst antially increase the forecasting a c curacies over longer predicti o n horizons . T hi s is due to the flexi b ility o f this approach to u p date t he model structure and/or param eter s at the host vehicle, the vehicle that generates the model, a n d then update the remote vehicl e s’ knowledge of the up d ated m o dels on the fly. Proper m o del de rivation strat egies w hich are capable of capturing the high level (long- te rm) driving behaviors, i.e. driving maneuvers, wh ile can simultaneously follow the low- level (sh ort-term) dyn a m ic tre nds within ea ch maneuver cou ld profoundly outperform the conventional forecastin g schemes at the remote (receive r) vehicl es. It is worth mentioning tha t a precise MBC-customized communication policy is al so essential in conjuncti on w ith t his f r amew ork to accomplish the above m entioned go a ls. In th e convention a l framework, which is currently the dominant adopted strategy in the vehicular industry, remote vehi c les alway s a ssume a predefined behavior (or roughly spe aking a predefined model) of the host vehicle, e.g. const ant accele r ati o n or constant speed model, with no structural model evolutions over time. However, the composition o f the c omplex VANETs, wh ic h is n ormally a mixtu r e of human driven, semi-automated and fully au tonomous nodes, forms a highly dynamic network a nd imposes a high level of stochastici ty in the model structures. T her efore, the weak predefined model structure assumption which neglects the plausible model structural e vol utions o ver time, r esults in a poor prediction quality . This precision deficiency , inspires the development of more advanced modeling schemes which are capable of capturing the model evolution trends an d handle the modeling task more rigorously. This is an inevitable requirement to realize a trust able situational aw ar eness in contem po rary vehicular ne tworks. In this work, w e have proposed a hybrid stochasti c modeling framework w ithin the MBC c ontext which is built upon a powerful Ba yesian n o n- p arametri c inf erence scheme, i.e. Gaussian Processes. The proposed framework, which has been depicted in Figure 1 and will be r efer r ed to a s Gaussian Process- Stochastic Hybrid System w i th Cum ulative Relevant His tory (CRH-GP-SHS) fr om now on, combines the im p ressiv e flexibility and forecasting capabilit ies of non-paramet r ic Bayesian methods with the apprehens ible SHS modelin g procedure and tries to increase the resultant model precision using a high-level online maneuver-based training history selection scheme. Performance of the proposed framework, at inter-mode le vel, has been investigated for a specific maneuv e r, i.e. lane change, to demonstrate its performance enhancement capability against the state of the art prediction methods currently utilize d in realistic vehicula r industry . Constant speed model is selected in this work as the baseline f or comparison and performance e valuat ion. The analysis is perform ed on a set of real l ane chang e m aneuvers f rom NG SIM-US101 [20], w hich is a realistic dataset has been available b y US-DoT. The rest of this paper is organized a s follows. Section II is devoted to the target ed problem statem ent, in addition to a brief theoretical explanation of the underlying building blocks of the proposed fr a m ework, i.e. n on-parametric Bay esian Gaussian process inf erence, and stocha stic hybrid sy stems notion. The evaluation details are presented in section III. Finally, we conclude th e paper w ith a summ ar y in sec tion IV. II. P ROBLEM S TATEMENT A. Gaussian Pro cess Based S tochastic Hybrid System with Cumulative Relevant H istory (CRH-GP-S HS) Framework As mentioned earlie r, the final goal o f the modeling framework investigated in this pa p er, i.e. CRH-GP-SHS framework, is derivin g precise p redictiv e models fo r both sho r t- term and long-term mixed driver/vehicle behaviors. trends (almost w ithin 0-3 sec o nds) of the critical vehicle dynamic states, such as i ts position , v elocity, a c celerat io n, etc., in side the framework d iscret e m o des which are equiva lent to different long-term b ehaviors (maneuvers) of the driver. T he proposed approach to fulfill this goal is building a cumulative maneuver- specific t r aining his tory on the fly from the identical or relevant observed maneuvers in recent driving history o f the driver, and then feeding this training data to the model inference block, i.e. Gaussian process block, as its initi al training set. T his initial training set will be updated in an o nline manner by adding new observations from the currently ongoing maneuver in order to force th e inf erence proce d ure to conside r the cur rent cognitiv e state an d a c tions of the d r iver in its model derivat ion procedu re. When each long-term m aneuver is finish ed, its da ta is added to the training data bank of that specific maneuver to be used as part of the initial training history for the next sim ilar man euver. Another equivalent app roa ch to the aforementioned m ethod of initial training set augmentation by new o bserved relevant maneuv e rs, is creating a maneuver-sp e cific model bank from the currently observe d relevant maneuvers and then feed this pre- learned m o del parameter as the ini tial paramete r v alues for Stand s for t h e set o f differ ent infer red short - term behaviors with in i th lon g- term behavior N umber of long- term behav iors (Mane uvers, Modes , States) Num ber of sh ort-term behav iors for maneu ver j th GP inside the i th SHS Mode : Set of inter-maneuver kernel swi tch thresholds: Set of intra-maneuver kernel sw i tch thresholds: Figure 1. Prop osed Ga u ss ian Proces s-Stoch astic Hy brid Syste m with Cumula tive Rel evant Hi story ( CRH-GP -SHS) Fr a mew ork model inference in conjunction with the ongoing m aneuver data as the m od el infe r ence training set. This se cond method, tr ies to fine-tun e the pre-le a rned model of this maneuver and a d apt its inferred parameters to the driver’s c u rrent b ehavio r, w hi ch might come from a different cognitive status, su c h as distraction, haste, drowsin ess, etc. T hese two approaches are theoretica lly equivalent, b ut the second o ne should be more appropriate for online applicati ons, such as our application, since it already has a pre-lea r ned m odel available and needs t o process th is model using a short observation s et, coming from the m aneuver w hi ch is currently in progress. T he ore tica l aspects of the short-term behavior inference metho d, i.e. Gaussian process regressi o n, is briefly c o vered in the following su b -secti on. B. Non-Param etric Bayesian Inference ba sed on Gaussia n Process Reg ression Different vehicle dynamic states which are intended to be modeled based on our earlier d iscussi o n in section II.A, c o uld be considered as individual time-seri e s w hich should be regressed using a n appropriate regression metho d. In this framework, targeted time-series values, e.g., position values, are assum ed to be gen erated by som e underlying function of ti me, . Therefore, the regression problem here is equivalen t to discovering the characteris tics of this f unction thr o ugh a finite set of its availa b le realizat io ns . W e propose to use the Bayesi an inference fram e work here, focusing o n non-pa rametric regression. The g o al in a n o n-par a m e tric regression method is to find the b est functi o n representation for the observed time-series values without any prior assumption on the form of the underlyin g function. We plan to use a non-parametric Bayesian inference method, i.e., Gaussia n process regression, to derive the model of the host vehicle and its driver as a unique object. The outcome is a set of functions describing the underlying modes that generate the behavior of the driv e r/vehicl e combination. Gaussian p rocess regressi on is powerful class continu o us function modeling . Gauss ia n processes could also be utilized for classificat io n p urposes, instead o f regress io n , in the ca se o f discrete function values, wh ic h is out of this paper’s scope. A formal definition of Gaussian process could be represented as follow s [ 21]: A Gaussian process defines a distribut io n over function values at any arb itrary point w ithin the function in p ut range, su ch that any finite subset o f the draw n function v alues from this dist r ibuti o n form a multivariate Gaussi a n rando m vector (have joint Gaussian distribution). T he comm o n notati o n for this d efinition is as follow s : (1) (2) (3) A general pictorial representat ion o f the sample paths from a Ga ussian process prior and posterior distribution is depict ed in Figure 2. Posterior distributi on is inferred by conditioning the problem on a se t of noisy observati ons as the trainin g data. Gaussian process regression model assum es each observed value a s a draw from a normal random variable. Therefore, the set of observations form an -dimensional mult ivariate normal random vector. This multivariate random vector is defined by a mean vector of length plus an covariance matrix. T his covariance matrix is c alle d the kernel in the Gaussian process contex t. This -dimensional multiv a riat e (jointly) normal random vector is consi dered as the marginal distributi o n of the underlying infinite dimensional vector, i.e., underlyin g function af ter integrating out the function v alues at all unobserv ed input points . Kerne l matrix defines the correlation b etw een the elements of this -dimensional marginal distributi on. It is notable that the w hole modelin g innovation o f the GP method is almost convey ed by the kernel function characteristics, rather than th e m ean fu nction. Dif ferent types o f kernels have been proposed in the lite r atur e, such as linear, squared ex ponential, and spectral mixture, to name a f ew . Each ke r nel type is appropriate to capture a specific pattern in the time- ser ies e volution . Due to the n a ture of the prob le m which has been tackled in this work, we pi cked the linear ker nel for o ur modeling purposes. More specifi cally, since the baselin e information re cording time intervals, i . e. 1 0 0 ms , is in the order of magnitu d es of our m e chanical system ( vehicle/ driver) response time (due to the inter nal p hy sical system inertia ) , high rate fluctuati o ns cannot usually b e observed in the sy stem physical dynam ics rec o rds. Sin ce line ar kernel is not o nly a function o f diff e rence between input values, a n d consequently is not invariant with respect to the input domain translati o ns, it is categorize d unde r non- stationary kernel types. This kernel could be formu la ted as fo llows: (4) III. M ODEL E VALUATION AND A NALY S IS In order to evaluate the perform ance o f the proposed method, the aforementioned Gaussian p rocess- based modeling schem e has been applied on an e xten sive set o f realistic driving maneuv e rs available in the N GSIM-US 1 01 dataset . More specifically , our focus in this work is on a discrete m ode (a maneuv e r) o f the CRH-G P-SHS framew or k, in order to demonstrate the e ffec tiveness of GPs for short-te rm pattern modeling within the sys te m discrete modes. The lane change maneuv e r has been chosen in this w ork as a specific long-te r m driver b ehavio r , an d we tri ed to m odel the l ateral posit io n o f the vehicle, as one o f th e most critical dy na mic parameters required by safety a pplications in lane change scena r ios , th ro ugh the available set of its alrea d y obse r ved instan ces. It should b e emphasized that these p ositi o n values are basic ally fu nction of both the mechani cal plant (veh icle) a nd the stochas tic human- driven actions taken by the driver. Thus, the aforementioned problem can be noted as modeling a stochastic system , which Figure 2. Ge n eral representation of th e Gaussian process infere n ce of function f(t) conditioned on a n oisy set of observ a tions. (I ) Prior (II) Posterior distribution over the underlying functions has several latent variab les, e.g. driver co gnitive state, weather and road situation, e tc. , which are not directly available from the dataset. T his point justifies the higher p erform ance of a stochastic modeling fram e work, instead of us ing certa in predefined m od els w ithout any structur al evolution ove r tim e. It is assum ed here that, in the case of our problem , the host vehicle desires to model its own future behavior through its own available history recorded w ith 10 Hz rat e . These m odels can be communicated afterwards over the netw or k and be utilized in other (rem o te) vehicl es in order to enable them to predict the host vehicle’ s behavior, w ithout rece p tion of new r a w information or model up dates during a certain time period , referred as the forecast horizon. Therefore, we tried to evaluate the precision of the achieved forecasted values by the model over the forecast hori zo ns ranging from 100ms (1 sample) to 3 seconds ( 30 samples) after the last observa tion instance . 40 lane change maneuvers hav e been chosen f rom the N GSIM-US101 dataset for our analysis purposes. Each maneuver has a 3 second duration and is sy mmetrically tr uncated from the r est o f the dataset, i.e. from 1.5 seconds before the reported lane change moment in th e dataset to 1. 5 second after th a t. T he lat eral displacement has also been cross validated in order to confirm the existenc e o f a true and com p lete lane change w ithin the mentioned durati o n for each selected maneu ver . For all of the selected maneuvers, alm o st 10 feet of lateral displacement has been observed , which is identi cal to the typical lane width and confirm s the corr ectness of th e recorded lane c hange trajectory . The follow ing c onclusions could be derived out of the results: - GP regression modeling schem e strongly o utpe r form s the baseline model for forecast horizon values greater than 1 second ahead, wh ich could be equivalently interprete d as the recepti on rates unde r 1 Hz (Figure 3). In this figure the relation between the forecast horizon (in sec o nds) and th e recepti on rate (in Hz ) is as follow s: (5) Therefore, by sweeping the forecast horizon from 100ms to 3s (or equiv a lently from 1 t o 30 sam p les ahead), the recepti on rate sweeps from 5 Hz t o a lm ost 0.32 Hz. Considering the discussed observations, it can be concluded that for high ly congested netw ork situations, if the baseline model be augm ented by the GP regression model with a linear kernel, the r esultan t compound model will be capable of f o recasting both near (less than 1 seconds a head ) and far f uture (between 1 and 3 seconds ahead) cases. In this com p ound model, the baseline sub-model is responsible for the former prediction duration, while GP su b -m o del han dles the latter. It is w orth mentioning th a t far futu re prediction accuracy is essentia l in congested netw orks where the model updates cannot be r eceived fr e quently by the remote vehic les. - The far futur e behavior prediction accuracy at the starting mom e nts of the maneuver is highly essenti al for the c o nt r ollers which handle th e remote vehicles’ safety applicati o ns’ tasks. A higher accuracy prediction for the farther future instanc e s provi des more adequate models to these cont rollers f or a longer future ho r izon , which in turn increases their capability of m aking sm o other and wiser control actions. T his statem ent is very important, especially if the safety applications employ model predictive controll e rs (MPC) to ac hi e ve their goals. Therefore, w e have also evaluate d the far future accuracy prediction of th e GP model versus baseline in Figure 4 . , ca lculated over the whole set o f selected 40 lane changes. This figure, which show s a notable higher performance for GP in this case, presents the 9 5 % of the absolute e r ror v a lues over far predicti on horizons (2-3 seconds ah ead) wh en the lane change maneuver is in its beginning phase (during fi rst 1s of the lane ch ange maneuv e r). Horizontal axis in this plot sweeps the number of co nsecutiv e observed r elevant maneuvers, i.e. lane changes, wh ic h have been augmented in the training histo r y one by one. T his num ber ranges fr om 1 to 40 lane changes in our analysis. So, one could interpret this figure in the follow ing w a y: assume a driver st ar ts a trip an d w henever he m akes a complete relevant m a neuver during this trip, this m aneuver is added to the training hist ory which will b e us e d for the next similar maneuv e r. So the training history becomes richer gradually by aug menting more an d more relevant data w hen the driver contin ues his trip. I t could be concluded that although increasing the number of augmen te d relevant maneuvers in the training history does not necess arily reduce th e prediction error, GP method accura c y always domin a tes the baseline model. - The overall performance of the GP model versus the baseline, over the whole range of forecast horizon (0-3 seconds) and during the complete lane change maneuv e r has been evaluated for all 40 lane change maneuv e rs. F or this analys is, sam e as Figure 4, thes e 40 maneuv e rs have been sorted in a sequence from la ne change 1 to lane change 4 0 where the lane change in the sequence is assumed to have the previous lane changes as relevant maneuvers in its training history . The resu lts, w hich a re depicted in Figure 5, show the noticeable higher accuracy for GP v e rsus the baseline. Figure 3. 95% absolute err or vs. reception rate for a complete lane change maneuver (3 seconds) Figure 4. 95% absolute err or for 2-3 seconds ahead prediction horizon during the starting phase of the lane change maneuver (first 1s of the maneuver) calculated over all maneuve rs. Figure 5. 95% absolute err or for 0-3 seconds ahead prediction horizon during the complete l ane change maneuver , calculated over all maneuvers. IV. C ONCLUDING R EMARKS In this work CRH-GP-SHS framew o rk, which is a st ochastic hybrid system modeling framew ork based on a non- parametric Bayesian regression schem e, i.e. G a ussian processes, has been proposed a n d e valu a ted. T his fr amework could be employed within the cont e xt of m o del- b ased commun ic ation to jo int ly model the v ehicle/driver behavior through a set of observed relevant m a neuvers in th e recent hist ory of the driver. This framework has been evaluated at th e inter-m o de level he re. The inter-mode level is responsi ble for capturing the short-te rm behavioral evoluti ons over time (within around 3-5 seconds ahead) during o ne specifi c long- te rm behavior (man euver or mode). The perform ance of th e proposed approach to track the joint vehicle-driv er behavi or is investig ated vi a its ability to forecast the position o f the subject vehicle. Lane change has been selecte d a s the long- term behavior here and a set of lane change maneuvers f ro m NGSIM-US101 realistic dataset has been employed for this analysis. T he results show a significant tracking precision improvement against the constant speed model, w hich is one of the state of the art prediction meth o ds in the current vehicular industry , as the baseline. Deriving sim ilar models for different othe r maneuvers, such as f r ee followin g, take over, joining and leaving a platoon, etc., and then merging them togeth er to f or m a com p lete C RH-GP- SHS model is the future researc h directions which are now under investigati on by the authors . R EFERENCES [1] J. B. Kenney, "Dedicated Short-Range Communications (DSRC) Standards in the United States," in Proceedings of the IEEE , vol. 99, no. 7, pp. 1162-1182, July 2 011. [2] J. W a ng, C. Yu, S. E. Li and L. Wang, "A Forward Col lisi on W a rning Algorithm w i th Adaptation to Driver Behaviors," in IEEE Tr an sactio ns on Intelligent Transportation Systems , vol. 1 7, n o. 4, pp. 1157-1167, April 2016. [3] S. M. I ran manesh, H. N. Mahj oub, H. Kazemi a nd Y. P. Fallah, "An Adaptive Forward Collision Warning Framework Design Based on Driver Distraction," i n IEEE Transactions on I n telligent Transportation Systems . [4] F. Mu ehlfel d , I. Doric, R. Ertlmeier and T. Brandmeier, "Statistical Behavior Modeling for Driver-Adaptive Precrash Systems," in IEEE Transactions on Intelligent Transportation Systems , vol. 1 4, no. 4, pp. 1764-1772, Dec. 2013. [5] H. Kazemi, H. N. Mahj oub, A. Tahmasbi-Sarvestani, and Y. P. Fall a h, " A Learning-based Stochasti c MPC De sign for Cooperative A daptive Cruise C ontrol to Handle Interfering Vehicles," to be a ppeared in IEEE Transactions on Intelligent Veh icles . [6] F. Breyer, C. Blasch k e, B. Farber, J. Fr eyer and R. Limbacher, "Negative Behavioral Adaptation to Lane-Keeping Assistance Systems," in IEEE Intelligent Transportation S ystems Magazine , vol. 2, no. 2, pp. 21-32, Summer 2010. [7] "Preliminary Reg u latory Impact Analysis FMVSS No. 150, Vehicle-to- Vehicle Communication Technology for Light Vehicles," NHTSA DOT HS 812 359, Dec. 2016. [8] Y.P. Fallah, C.L. Huang, R. Sengupta, and H. Krishnan, “Analysis of information dissemination in vehicular ad-hoc networks of cooperative vehicle safety s ystems,” IEE E Trans. on Vehicular Technology , vol. 60, no. 1, pp. 233–247, January 2 011. [9] Y.P. Fallah, C.L. Huang, R. Sengupta, and H. Krishnan, “Congestion control based on channel occupancy in vehicular broadcast networks,” IEEE Vehicular Technolo g y Confe rence (VTC-Fall), Se p tember 2010 [10] G. Bansal, H. L u, J. K enn ey , and C. Poel laba uer, “EMBARC: Error model based adaptive rate control for vehicle-to-vehicle communications,” Proc. ACM International Workshop on Vehicular Inter-Networking, Syste ms, Applications (VANET), June 2013, pp. 41– 50 [11] C. L . Huang, Y.P. Fallah, R. Sengupta, and H. Krishnan, “Adaptive intervehicle communication control for cooperative safety systems,” IEEE Network , vol. 24, I ssue 1, pp. 6–13, January -Februa ry 2010. [12] G. Ban sal, J. K enn ey, and C. Rohrs, “LI MER I C : A linear adaptive message rate algorithm for DSRC conge st ion control,” IEEE Trans. Vehicular Technology , vol . 62, no. 9, pp. 4 182–4197, Nov ember 2013. [13] H. L u, G. Bansal, and J. Kenney, “A joint rate- p ow er cont rol algorithm for vehicular safety commu n ications,” Pro c . IT S world congress 2015. [14] A. Weinfied, J. Kenney , and G. Bansal, “An adaptive DSRC message transmission interval control algorithm,” Proc. ITS World Congress, October 2011, pp. 1–12. [15] S. M . O. Gani, Y. P. Fal lah , G. Bansal and T. Shimizu, "A St udy of t he Effectiveness of M essage Content, Length, and Rate Control for Improving Map Accuracy in Automated Driving Sy st ems," in IEEE Transactions on I n telligent Transportation Sy stems. [16] Y. P. Fall ah , N. Nasiriani a n d H. Krishnan, "Stable and F a ir Powe r Control in Vehicle Sa fety Networks," in I EEE Tr a nsactions on Vehicular Technology , vol. 65, no. 3, p p . 1662-1675, March 2 016. [17] SAE I n ternational, “Surface Vehicle Standard – On-Board System Requirements for V2V Safety Communications, ” J2945TM/1, I ssued 2016-03. [18] Y. P. Fallah, "A model-based c omm u nication approach for d istributed and connected vehicle safety systems," 2016 Annual IEEE S ystems Conference (SysCon) , Orlando, F L, 2016, pp. 1-6. [19] E. M oradi-Pari, H. N. Mahjoub, H. Kazemi, Y. P. Fallah and A. Tahmasbi-Sarvestani, "Utilizing Model-Based Communicat i on and Control for Cooperative Automated Vehicle Applica tions," in IEEE Transactions on Intelligent V ehicles , vo l. 2, no. 1, p p . 38-51, March 2017. [20] NGSIM Homepage [Online] Available : https://www.fhw a .dot.gov/publications/rese arch /operations/07030 / [21] Gaussian Processe s for M achine Learning C arl Ed ward Rasmussen a nd Christopher K. I . Williams The MIT Press, 2006. I SBN 0-262-18253-X.
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment