An EEG pre-processing technique for the fast recognition of motor imagery movements
In this paper we propose a new pre-processing technique of Electroencephalography (EEG) signals produced by motor imagery movements. This technique results to an accelerated determination of the imagery movement and the command to carry it out, withi…
Authors: Kalogiannis Gregory, Kapsimanis George, Hassapis George
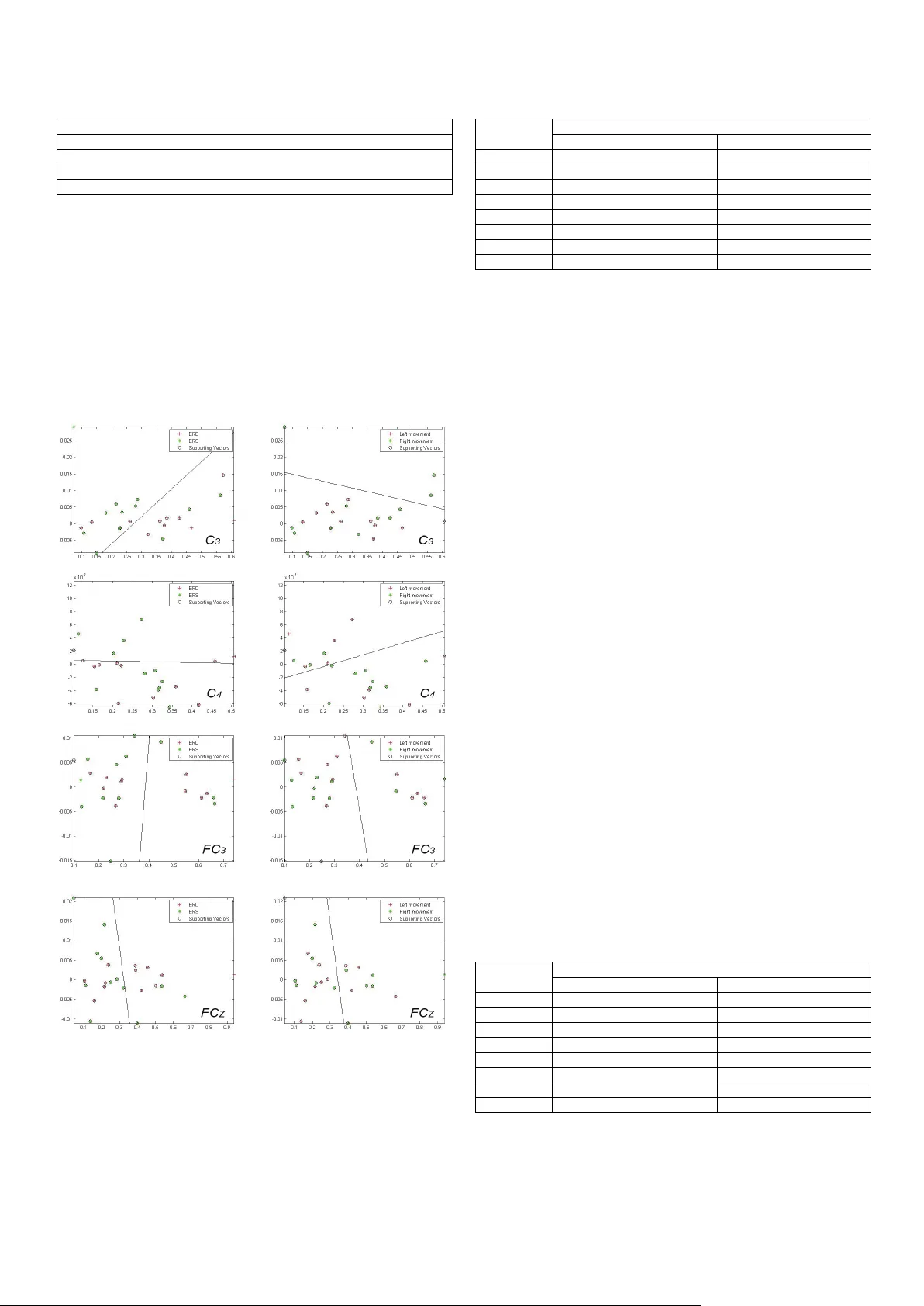
An EEG pre - processing techni que for the fast recognition of motor imagery movements Kalog iann is Gre gory Arist otle Uni versi ty of T hessa loniki Department of Electrical an d Co m pu ter Eng ineeri ng Thessaloniki, Greece gkalo gianni s@ece .auth. gr Kapsim anis Ge org e Arist otle Uni versi ty of T hessa loniki Department of Electrical an d Co m pu ter Eng ineeri ng Thessaloniki, Greece kapsimag@ece.auth.gr Hassapis George Arist otle Uni versi ty of T hessa loniki Department of Electrical an d Co m pu ter Eng ineeri ng Thessaloniki, Greece chasa pis@e ng.aut h.gr Abstract — In this p aper w e prop ose a new pr e - processing tech nique οf Elect roenc ephal ogra phy (EEG) signa ls pro duce d by motor imagery move ments. This techni que results to an accelerat ed determinati on of the i m agery movement and t he c o m m a n d t o c a r r y i t o u t , w i t h i n t h e t i m e l i m i t s i m p o s e d b y t h e require m ents of brain - base d real - ti m e control of rehabilitation devices, maki ng thus feasible to dri ve t hese devices accor ding to patie nt’s w ill. B ased o n eve nt re lated des ync hroniz ation an d synchroniz ation (ERD/ERS ) of motor i m agery , the receive d p a t i e n t s i g n a l i s f i r s t s u b j e c t e d t o t h e r e m o v a l o f e n v i r o n m e n t a l , syste m a nd i nterference noise w hich corre spond to n ormal human acti vities such a s eye - bli nking and car diac motion. Nex t, pow er an d e nergy features o f the p roces sed si gnal are co m par ed with the same feature s of classified signals from an available datab ase and the clas s t o w hich t he proce ssed sig nal bel ongs, is identified . The database classification is done off - li ne by usi ng the S V M alg orithm. Keyword s — rehabilitation, e lectroen cephalograph y , preprocesss , m otor imagery mo vements I. I NT RODUCTION Injur ies and trauma to the human joi nts, commonly req uire surgical t reatment follow ed by post - operative phy sical therapy rehabilitati on. Dev ices, suc h as co ntinuous passive motion mach ines (CPM), are use d for r ehabili tation in hospi tals, clinics or gen eral practices and th ey are importan t suppl ement to medic al and the rapeut ic trea tment . The goals of rehabilitati on are: contr ol post - oper ative p ain, red uce inflamm ation, j oin t stiffness, s welling, protect th e healing repair or tissue [ 1 ] and re store the range of moti on in the joint post - operati vely. Also such devi ces contribut e to regeneration and bl ood c ircu lati on, p reven t thr ombos is an d embol ism pheno mena [ 2]. Their mod e of operation is to m ove injured joint o ver a range of motio n in a circular periodical way de fined by the physicia n [ 3 ]. F or exam ple in case of elbow and fist j oints, these devices impose m ovement v ia flex ion/exten sion an d/or pron ation/sup ination to the injured jo int [4]. Although their indi sput abl e cont ribu tion to reha bilit ati on [ 5 ], it is b eli eved that th e over all treat ment ti me can be reduce d and th e overall reha bili tati on coul d be i mpr ove d if the patient interacts w ith these d evices and their motion is determined according t o patient’s w ill. A variety of devices host inter esting features such as the functionality to periodically in crement the max imum angle on each cy cle, the abili ty to progr am the unit for p recise adj ustment of patient - specific ther apy values or even t o store th e progr amm ed th erapy paramete rs into local media. These f eatures allow their eas y connect ion w ith contr ollers w hich can m ake the devi ces to f ollow traject ories determ ined by processi ng the gen erated by the p atient brain signals . These signa ls may include the patient’s intens ions a nd will for pot ential limb movement. A typical structur e of a commercial reha bilitation device is il lustrated in Fig. 1. T he implem entation of su ch an a rchitec ture re quires f ast reco gnition of the motor i m age ry movements of the j oint in order to crea te the appro priate cont rol signals . This can be don e by proc essing the EEG data with the p urpose of re moving the noise an d inform ation that i s not essen tial f or creatin g the cont rol s ignal. In this paper w e dem onstrate a new preprocess t echni que of EEG signals focused o n event related desynchronizat ion and synchro nization (E RS/ERD) [6] phenomena, fast enough to run within the tim e limits im posed by the on - line control of the conti nu ous passive devices . It is dem o ns trated experim entally that a signif icant computati on time reducti on is achie ved against a ty pi cal technique w itho ut preprocessi ng in the reco gnition of a m otor imagery movement. Fig . 1 . A ty pical stru cture o f a comme rcial CP M dev ice for join t rehabil itatio n. In sect ion II the fe atures of EEG sign als that ar e associ ate d with motor imagery m ovements are explain ed and the mentioned above proposed tec hnique . This technique invo lves the re cognition of the EEG features related with the moto r imagery move ment by removing no ise and other art if acts which ar e not rela te d w ith t hese movements. In Sec tion III the technique is tested w ith pre - rec orded E EG dat a and conclusi ons are dra w n w hich are pr esented in the same Section . Overal l conclusion s ar e presented i n Secti on IV. S ect ion V propose s future work that can be unde rtaken towards the realization of the complete brain - ba sed contr ol of C PM. II. P REPROCES S IN G O F E E G D ATA Preproc essing of inspect ed EE G for making eas ier the extracti on of d esired f eatur es is pondero us. Preproce ssing methods used in EEG ar e very depend ent on the goal of t he applica tions. Th ere are some m ethods that are use d very commonly to improve the q uality of Signal to Noise R atio (SNR), such as Common Avera ge Referencing (CAR) [7 ]. R esampling the data, filtering, bad channel dete ction, I ndepende nt C ompo nent Analysis (ICA), epoc hing continuous data, an d epoch re jection a re the m ost comm on techniques in the prepro cessing stage of EEG recordings [8 - 11 ]. Since w e are inte rest ed on motor i magery tasks, w e focus on manipulating da ta that correspond to s pecific electrodes over the hum an - patient scalp. T hese are recordi ngs that are referred to the premotor cor tex brain area. Us ing the typical 10 - 20 syst em, the f ocused ele ctrodes are th e FC 3 , F C Z , FC 4 , C 3 , C 1 , C Z , C 2 and C 4 as illust rated on Fig . 2. During ima ge ry mot or mov eme nts tasks, the so call ed mu and beta event - re late d desynchr onizati on ( ERD) and e vent - relate d synchronizat ion (E RS) are taking p lace, allowing us to determ ine human patien t imaginar y mo veme nt . [ 1 2 , 13 ] . T hese imag er y tasks, t hat can be brief movement i m age ry or continu ous m ovement im agery , can be recogn ized as mu and beta E RD/ERS patter ns inside the recorded EEG. Fig. 3, illustrates p ower time variation s of ERD/ERS patterns i n EEG signals re ceived from the FC 3 ele ctrode, placed on the premotor cortex area of the human bra in . O bserv ed pow er suppression an d spikes indicate that the ERD/ERS even ts of imag ery motor mov ements are taking pla ce. The pow er spike and su ppression s izes and the time w indo w dur ing which they occur, ca n be used to recognize the type of movement, i.e. op en left fist or close right fist, or rotate right arm over the elbow or feet m ovemen ts. Fig . 2 . The 10 - 20 sy stem with the focus ed electrod e s FC 3 , FC Z , FC 4 , C 3 , C 1 , C Z , C 2 and C 4 annot ated . Fig . 3 . E vent - r elate d desy nchroniz ation/ sy nchron izatio n of mot or imagery tasks du ring EEG recordin g over premotor cort ex electrode FC 3 A. EEG data preproce ssing foc used on E RS/ERD eve nts During an offline procedu re, patient is subjec ted t o i mag ery motor movem ent while EEG data is recorded . These da ta recordi ngs can be used as input data to classif y the signals accordi ng to their power suppre ssion or spike at the above mentioned time window. T hen, once certain si gnals from a patient a re mo nit ored they can be tested t o see i f they match t he power fea tures of a cer tain sig nal clas s, rec ognizing i n this w ay the specific motor im agery movem ent of the patient . However , original recordings o f EEG d ata contain environmenta l and system no ise and in ter ference that corresp onds to normal hu m an activity such as e ye - blinking and card iac m oti on wh ich need t o be remov ed in orde r to is ola te the ERS /ERD even ts fr om the r est of the s ignal. The most obvious type of noise th at must be eliminated is th e dc Para m eter . T herefore, a high pass fil ter from 0.5 Hz to 90Hz must be applied t o the initial dat a . Furth erm ore, int erfe renc es due to power supply network must b e also removed. T h erefo re, a second ban d elimin ation filt er at 50 Hz can be use d. In order to remove n oise that is corr elated with eye - mo ve ment (E OG) and heart m oti on (ECG), the blind source separatio n algorithms (BSS) [14 , 15] can be u sed. Each re cording of offli ne EEG data, co rresponds to a sessio n w hich may include s everal individual runs while each run corres ponds to a s pecific task, i .e open / clos e left f ist. By den oting by S w , the union o f all the sessions S i , then S w , is defined a s: (1) Each r un, R nSi is a matrix consist ing o f mxn elemen ts, where m depends on th e sessi on select ed and n e quals to the number of EE G channels C n that are mea sured. Each run a lso is adjus te d to a speci fic task action of the human subjec t being meas ured. Since w e ar e f ocused on i magery motor m ovements, w e are isolatin g task s that are c orrelat ed to an imag ery mov e ment ac tion , for exam ple open or clos e right/left f ist. Each im agery tas k T i has a ti me of execu tion t Ti . Ta king into co nsideration that we fo cused on moto r cortex events, t im e of execut ion t T i is expande d to include the tim es o f the mu and beta de - synchronizatio n a nd synchronizatio n phe nomena. Also, it is known that in a ny m ovement, the ERD event is preced ed by the move ment - related co rtical potential (MRC P) lasting for a few s econds and being associat ed wit h delta rhy thms (low er than 4H z. ) T he sum of all these ti mes comprise a s ignal e poch of a movement. Therefore, for t he purpose o f identi fy ing movement, all that is needed is to isolate and extract t h ose sessio ns and discard the remaining signal . By deno ting by t ERD,Ti the time durati on of the ERD case and t ER S,Ti the time dur ation of ERS, the actual tim e window of signal ob servation is: (2) Fig . 4, illustrates the tim eline of an event occurred includ ing ERD, ERS a nd MRCP p henomena . Still the reduced signal contain s interferences that are at tribu ted to eye artifacts. S uch no ise can b e removed by applying the ty pical In depen de nt Compone nt Analysis (ICA) algori thm [16] . Our final da ta are a number of vector s, which reflect the P ower an d Energy of the identified ERD/ERS pa ttern in the s ignals. The am plitude of these vect ors can be used as a feat ure to st op or adjust the m ot ion angle of the C PM device . For eac h C n EEG chan nel, w e extract two feat ure vector s that correspond s to power, a nd e nergy of the isol ated epoc h . Power i s c alc ulated using the formula (3) and energy is co m put ed based on the formula (4) , where N is the number of t he observ ed potent ials a nd T the peri od of s am pling . Fig . 4 . The t imelin e of a a n execu ted m ovement with ERD and ERS ti me alo ng w ith the aditio nal EEG reco rdin g. All the just de s cribed successi ve steps leading to the recognition of ERD/ERS patte rns and the c omputation of th eir power and energy are listed in Ta ble I. III. E XPER I MENTAL R ESULTS OF TH E P REPR O CESSED T ECHN I QUE In order t o evaluate t he com putati onal tim e and effecti veness of th e prop osed pr e - processing te chnique, sever al experim ents w er e c onducte d using prerecor ded EEG datasets . These pre recorde d datasets w ere created and cont ributed to P hysi oN et [ 1 7 ] da ta base by the developer s o f the BCI2000 instrum entation system [1 8 ]. D atasets in cludes diff erent sess ions of ove r 15 00 of on e and t wo m inu te EEG re cordi ng s that corre spond to 109 volunt eers . The volunteer s performed different m otor/imagery tasks w hile 64 - channel E EGs were recorded . Each vol unteer perfor m ed 14 exper im ent al runs, two one - minu te baseline ru ns (one w ith ey es open, one w ith eyes closed), and three two - m inute runs of each of the tasks present ed on Table II . All e x perimen ts w ere perform ed on an Intel Core i7 – 2 600K at 3.70G Hz m ac hine, with 16 G B of RAM. A. Offlin e procedu re During offline p rocedure , all 109 dif ferent datasets where pre proce ssed a cco rdin g to t he st eps des cri bed in Tabl e I. whereas t hree dif ferent Bl ind Source S eparati on (BSS) algori thms w er e used as part of the I CA analysis. T he used algorithms a re: th e BSS thr ough Canonical Corr elation Analysis ( BSSCCA), t he fast algorit hm for BSS of non - Gaussian and ti me corr elated sig nals (FC OMBI) an d the Second Order BSS ( SO BI) [ 19 , 20] . Acco rdingly, for each datase t, three m atrixes were produ ced that contain the featu re vectors of Pow er and Ene rgy of ERD/ERS events. Binary Support Vect or Mach ine (SVM) w as used as th e sup ervised learni ng model. I n this ca se, all matr ixes o f feature vectors w ere combine d into a new matrix t hat contain ed the values o f power, a nd e nergy of E RD/ERS events, o f all 109 datase ts. Train ing data constru ction w as based on the s election of the e lectro de. For ea ch ele ctrode Cn , the trai ning d ata cons ists of the respe ctiv e colu mns of pow er and e nergy. TA BLE I. P REPROCESSING D AT A T ECHNIQUE FOR R EDUCING I N ITIA L D ATA O F E EG R ECORDINGS Preproc essing EE G data t echnique 1. Load the d ata 2. Selec t elect rodes fr om motor c ortex a rea 3. Hig h pass 0.5H z ~ 90Hz to remove DC noise 4. Remov e EOGs an d ECGs a rtifact s 5. Band elimination @50+ - 5Hz t o remove lin e noise 6. Isola te epoc h a. Calc ulate total time w indow of moveme nt t b. Iso late t he event c. Re ject the MRCP d. Reject re main ing sig nal 7. ICA algorit hm on isolat ed epoch 8. Ext ract Feat ure Vec tors for ea ch C n electr ode that con tains a. Power of ERD/E RS b. En ergy of ERD/ERS c. I ndex that c orre spon ds t o the type of event (ERD/ER S) d. Ind ex that corr esponds to the t y pe of movem ent (left/ right) TA BLE II. T ASKS THAT S UBJECTS P ERFORMED D URING E EG R ECORDINGS Task Description 1. Ο pen a nd clo se le ft or right fis t 2. Imagine op ening and closi ng left or right fist 3. ope n and c l ose both fists or both fee τ 4. Im agine opening and clo sing both f ists or bo th fe et Two gr ouping variable s, for the SVM a lg ori thm, were used duri ng the offline p rocedure, o ne between E RD/ERS events and one betw een left/rig ht movem ents. Fig 5 , illustr ates the support ed vectors that were produced using t he offline data f or electrode s C 3 , C 4 , FC 3 and FC z , while Table III presents respectively the executi on time of t raining for all the electrode s . Table IV presents th e execution tim e of trainin g for all the e lectr odes without using the d escribed prep rocess techniq ue. Consid ering that the exe cution of the SVM t raining on each non preproc essed data takes severa l secon ds, the pre proce s s techn ique reduces s ignificantly the training time. Fig . 5 . The produce d suppo rte d vect ors of SVM d uring trai ning, usin g the prep rocces s tehcn ique for electr od es C 3 ,C 4 , FC 3 and FCz. TABLE III. E XECUTION T IME OF S VM T RAINING U SING THE P REPROCESS T ECHNIQUE , IN S ECONDS El ectrode Tra ining Gro up Lef t/Rig ht , s ERD/E RS , s FC 3 0.8426 01 0.8315 07 FC z 0.8 41640 0.8339 88 FC 4 0.8399 87 0.8620 60 C 3 0.8758 43 0.8741 27 C 1 0.8574 34 0.8648 36 C z 0.8311 23 0.9618 68 C 2 0.8613 66 0.8693 57 C 4 0.8605 44 0.8610 83 B. Online procedur e In orde r to dem onstrat e and as sess the computat ion tim e of finding t he subject’s imagine d and execut ed movem ent typ e, a ran dom dat a set i s selec ted out of the 109 datas ets . T he d ata is preproc essed the w ay explained in Table I and the po w er and e nergy of the first epoch are compute d. This r andom datas et is then used as input data to the SVM supe r vised learning model that was us ed during o ffline procedure, in ord er to be classif ied. Tab le V prese nts the online proc edure execution time and the perc entage of the falsely classified sam ples . Similar computation tim es and percent ages are repo rted wh en the proposed technique is applied only to sess ions related with fist, elbow or other s pecific m otor imag ina ry mo ve me nts . T ab le VI prese nts the cl assification execution tim e w ith out prep roces sing the data. Fr om Ta bles V an d VI one can eas ily obse rve that t he cl assifi cation tim e usin g the prepr ocess ing techniq ue i s signif icantly re duced , w hilst t he number of erron eously classifi ed samples is practic ally equ al in bo th cases. IV. C ONCLUS I ONS A n e w pr e - process techni que of EEG s ignals produc e d by mot or ima ge ry move me nts has b een describ ed. This technique foc used on ERD/ERS of mot or ima gery pheno mena , resul ting to an accele rated determin ation of th e im agery m ovement . P ower an d energ y featu res of the process ed sig nal are compa red with the sam e features of classi fied s ignals from an avail able databas e . Thi s de term inat ion is p erformed within the time lim its imposed by the on - line control of the continuous passive r ehab ilita tion devic es. Severa l experim ents were contac ted using pre - record ed datase ts demonstra ting that a s ignificant c omputation time re duction is achieved ag ainst a training without the d escribed preproc ess technique, in th e reco gnition of a m otor imagery movement. TA BLE IV . E XECUTION T IME OF S VM T RAINING WHITHOUT THE P REPROCESS T ECHNIQUE , IN S ECONDS El ectrode Trainin g Gro up Lef t/Rig ht , s ERD/E RS , s FC 3 4.4586 32 4.2348 56 FC z 5.2345 78 5.3654 56 FC 4 4.9546 23 4.9423 67 C 3 3.5893 26 3.4523 56 C 1 3.6584 56 3.4215 37 C z 3.8423 67 3.9421 59 C 2 3.2476 53 3.4781 26 C 4 4.6354 78 4.5782 36 TAB LE V. E XECUT ION T IME OF S VM C LASSIFICATION U SIN G THE P REPROCESS T ECHNIQUE IN S ECONDS AND P ERCENTAGE OF W RONG C LASSIFIED S AMPLES . El ectrode Class ificati on Gro up Lef t/Rig ht , s Wron g Samples , % ERD/E RS , s Wron g Samples , % FC 3 0.1242 88 12 0.1244 59 11 FC z 0.1253 29 14 0.1265 18 13 FC 4 0.1286 60 7 0.14 114 4 5 C 3 0.1280 67 8 0.1291 01 5 C 1 0.1268 94 7 0.1276 08 7 C z 0.1252 79 4 0.1256 09 8 C 2 0.1270 79 7 0.1273 13 12 C 4 0.1279 45 9 0.1307 48 4 TA BLE V I. E XECUTION T IME OF S VM C LASSIFIC A TION W I THOUT U SING THE P REPROCESS T ECHNIQUE IN S ECONDS A ND P ERCENTAGE OF W RONG C LA SSIF IE D S AMPLE S . El ectrode Class ificati on Gro up Lef t/Rig ht , s Wron g Samples, % ERD/E RS , s Wron g Samples, % FC 3 5.6347 85 11 4.9923 74 11 FC z 4.2374 69 12 4.1785 48 14 FC 4 4.6404 33 7 5.0983 00 5 C 3 3.4962 84 9 3.9948 53 7 C 1 4.1954 63 7 5.0983 00 5 C z 6.0049 34 4 6.9636 25 7 C 2 5.4685 61 7 5.9114 80 13 C 4 5.3678 94 10 5.7321 89 5 V. F UTURE W ORK Experi men ta l re sults on the p re - reco rder dat asets sh ow that the descr ibed technique no t only achieves a good time perform ance but m anages t o classi fy co rrect, by usin g the pow er and energy features of classified signals, real time EEG data. Still, other feature vectors such as mean power of ERD/E RS or standard deviat ion between the mean and obse rved v alue s , can be eval uated w ithin the describe d pre - process ing techniq ue, in order t o perform much more acc urate classif icatio n. Furth erm ore, additi on ally datasets that corres pond to several im agina ry m ove ment s of human li m bs, such as fl exion/ extensio n and pro nation/supinatio n of e lbow , can be cre ated and use d in order to perform classi ficat ion focus ed on a diffe rent set o f im agi nary human movements , within the tim e limits im po se d by the requirem ents of real - tim e control of rehabilitati on devices . R EFERENCES [1] A. Big gs, W. J enkins, S. Urch, a nd KD. S helbourne , “Reh abilitat ion for Patien ts Fol lowing ACL Reco nstruc tio n: A Knee Sy mme try Mo del ,” N Am J Spor ts Phy s T her., v ol 4( 1), p p. 2 - 1 2, F ebrua ry 200 9. [2] KD . Shel bourne , A. B iggs a nd T. Gr ay , “De condi tioned knee : Theeffect iveness of a rehab ilitation program to imp rove sympt oms and functio n,” N A m J Spo rts Phy s The r., vo l 2(2) , pp 8 1 - 89, May 2007 [3] T. Le nssenEmail, M. v an Stey n, Y. Crijns, E.W altjé, G . Roox , R. Ge esink, e t al., “ Eff ective nes s of pro long ed use of conti nuous p assiv e motio n (CPM) , as a n adjunc t to phy siothera py, afte r total knee art hroplasty ,” BMC Muscu loskeletal D isorders , A pril 200 8. [4] A. Mau - Moell er, M . Behr ens, S. Fi nze, S. Bruhn , R. Bader and W. Mitte lmeie r, “T he effect o f contin uous pass ive mo tion an d sling e xercise train ing on cli nical and fun ctional out comes followin g total k n ee arthropl asty : a randomiz ed active - controll ed clinical study,” H ealth and Quali ty of Life Outcomes , May 2014. [5] DP John son and DM Eastwood, “Benefici al effects of con tinuous pass ive m otion a fter total condy lar knee arthro plasty ,” A nn R Co ll S urg Engl. , vo l 7 4(6), pp 4 12 - 416, November 19 92. [6] J. Yo ngw oong, N . Chang S., K . Young - Joo and W . Cheo l, “ Event - re lated ( De)sy nchro niza tion ( ERD/E RS) during moto r im agery tasks: Implicat ions for brain – computer inter faces,” I nternatio nal Jour nal of Indus trial Erg onomi cs, September 2011. [7] D. McFar land, L . McCane, S. Dav id and J. W olpaw, “ Spatial filte r sele ction fo r EEG - ba sed communi cation,” E lectroencepha lography an d Clin ical N euro phy siol ogy , vol 103, pp 38 6 - 394, Septem ber 1997 [8] A. De lormea, T. S ejnow skia and S. Ma keigb, “E nhanced detec tion of artifa cts in E EG data using h igher - orde r statis tics and inde penden t compon ent analysis,” NeuroImage, vol. 3 4, pp. 1443 - 1449, F ebruary 2007. [9] C. Joy ce, I . Gorodnits ky and M . Kutas , “Auto matic re moval of eye movement and blink artifacts f ro m EEG data usi ng bli nd com pone nt sepa ratio n,” Ps ycho phy siol ogy, v ol. 41, pp. 313 - 325, Mar ch 19 55. [10] N. Park s, M. Gannon, S. Long an d M. Young, “Boot strap Signal - to - Noise Con fidence I nterva ls: An Objec tive Method for Subject Exc lusion and Q uality Con trol in ER P Studi es,” Fron tiers in Hu man Neu rosci ence, vol 10, F ebruar y 20 16. [11] M. Man nan, M. Jeong, M. Kamran, “H ybrid ICA — Regress ion: Auto matic I dentific ation a nd Rem oval of Ocular Artifacts from Ele ctroencephal ographic S ignals,” F rontiers in Hum an Neuro science, vol 10, F ebruar y 20 16 [12] W. P enny , S. Ro berts , and M. Sto kes, “I magine d hand m ove ments identif ied f rom the EEG mu - r hythm,” J. Ne urosci. Met hods, Octo ber 1998. [13] C. A nders on, E. Stol z and S . Shams under , “D iscr imina ting m ental tasks using EEG repr ese nted by AR mo dels ,” I EEE 17 th An nual Co nfer ence , Engi nee ring i n Medi cine and B iol ogy So ciety , Septe mber 1 995. [14] K. Knuth, “D iffic ultie s appl ying rec ent blind s our ce se paratio n tech nique s to e eg and meg ,” Max imu m Entr opy and Bay esia n Met hods pp. 2 09 - 222, 19 97. [15] S. Fitzgi bbon, D. Powers, K Pope and C. Cla rk, “Removal of EEG noi se and a rtifact usin g blin d source separat ion.,” J Clin Neu rophysiol. vol 24(3) , pp 23 2 - 243, June 2007. [16] C. Am ari . and H. Yan g , “ A new lea rning algorit hm for blind signal separat ion ” , A dvance s in N eural Inf orma tion Pro ces sing Sy stems 8, MIT pres s , 1996 . [17] G. S chalk, D. McFarlan d, T. G lass, J . Hausdorf f, P. I vanov, R. Mark, et al., “ Phy sioBa nk, P hysio Too lkit, a nd Phy sioN et Co mpone nts of a New Researc h Resourc e for Complex Ph ysiologic Signals, ” C ompo nents of a New Researc h Resourc e for Complex Ph y si ologic Sign als , Ci rculati on 101(2 3) , e215 - e220 , June 2013 . [18] G. Schalk , D.J . McFarl and , T. H interb erger, N. Birbaumer , J . Wol paw, “ BCI 2000: A Ge neral - Purpose Brain - Computer I nterfac e (BCI) Sys tem ,” IEEE Transact ions o n Bio medic al E ngine ering , vol 51 (6), pp 1034 - 10 43, 2004. [19] V. Krish naveni , S. Jay araman, P. K umar, K. S hivakumar and K. Ram adoss , “ Com pariso n of I ndepende nt Co mpon ent A naly sis Algorith ms for Removal of Oc ular Artifac ts from Ele ctroencephal ogram,” Mea suremen t Scien ce Revi ew, vol 5(2 ) , 2005. [20] A. Cichoc ki, and P. G eorg iev, " B lind Sour ce Se parat ion A lgo rithms with Ma trix Co nstrai nts. ", I EICE T rans. Fundamen tals, Vol.E8 6 - A . No. 3, M arch 2003 .
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment