NLOS Mitigation Using Sparsity Feature And Iterative Methods
Well-known methods are employed to localize mobile station (MS) using line of sight (LOS) measurements. These methods may result in large error if they are fed with non LOS (NLOS) measurements. Our proposed algorithm, referred to as Sparse Recovery o…
Authors: Abbas Abolfathi, Fereidoon Behnia, Farokh Marvasti
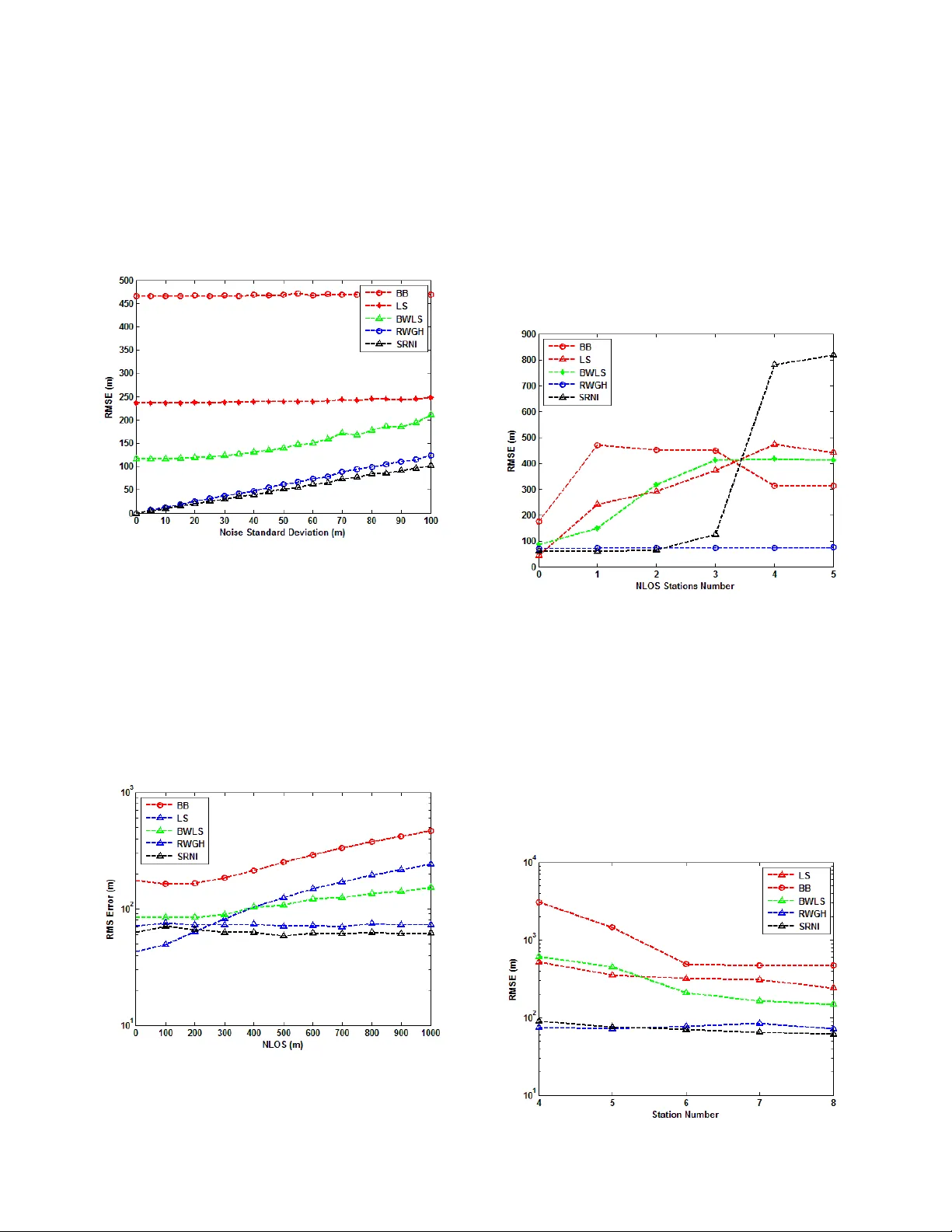
Abstract — well-known methods a re em ployed to loca lize mobile station (MS) using line of sig ht (LOS) measurem ents. These m ethods ma y result in large error if they are fed w ith non LOS (NLOS) measurements. Our proposed algorithm, referred to as Spa rse Recovery of NLOS u sing IMAT (SRN I), considers NLOS a s u nknown variables and solves the resultant underdetermined system emphasizing on its sparsity feature based on IMAT methods. Si mula tions are conducted to investigate the p erformance of SRNI in compa rison of other conventional algorith ms. Results demonstrate th at SRNI is fast enough to deal w ith large co mbination of B Ss and also accurate in lower number of BSs. Keywords — LOS, NLOS, So urce Localization, Spar se, IMAT, Iterative Method. I. I NTRO DUCTION Many applications of n ext generation wirele ss communication systems rel y on lo cation e stimation of mobile station (MS) . I t can be useful in network resource management, E -911 and hand off assista nce [ 6]. Ho wever MS lo calizing adventures is not limited to communicatio n systems. Psychologists are searching for the precise source location of an e lectric impulse in human brain [4]. T hese are the reasons o f ongoi ng r esearch on source location estimation. Location estimation in different fields uses the sa me principles. In three dimension al space, Distance bet ween transmitter and r eceiver defines a sphere centering each receiver. Intersection of these spheres leads us to the transmitter location. In an N di mensional space, at least N+1 receiver is needed to d etermine the loca tion uniquely. Time o f arrival (TO A), time difference of arrival ( TDOA) and signal strengt h measurem ent (RSS) are some of the well known tec hniques to measure the range between transmitte r and receivers [1]. In the presence of noise , spher es do not intersect i n one point, so it is necessar y to find the most pro bable point to fit the source locatio n. Some algorith ms such as least square (LS) are d eveloped to estima te this point [5]. LS ass umes signals have tr aveled throug h line of sight (LOS) pat h. If one or more receivers see the transmitter throug h a reflector, measured range exceed s its real value. Such a non line of sight (N LOS) vie w caused lar ge error in loca tion estimation . This often happens in an urban environment. Generally there are three main methods to co pe with the NLOS measurements. In first method, b y using t he propagation character istics of the channel and scatter ing model, MS location is d etermined. T his method needs prior information about localizatio n environment which is hard to achieve and varying time to time. The second method atte mpts to use all LOS and NLOS measurements with consider ing a weighting to minimize effects of N LOS condit ions. Residual weigh ting algorithm (RWGH) [1 ] find source location using all possib le combination of receivers to calculate t hese wei ghts. Unlike its accurac y, RWGH is time w asting, spatiall y when the number of receivers increase s. So me recent algorithm such as weighted least -square by b ounding bo x (B WLS) [2 ][4] are faster but not reliable i n less r eceiver number. In pr actical situatio n most of the receivers ha ve a LOS view to transmitter. Therefore we ca n consider NLOS error as a sparse vector. Third m ethod u ses sparsity feature of NLOS vec tor for identification and mitigation of NLOS. Compressive se nsing methods such as iter ative reweight ed LS (IRLS) are used b roadly for this purpose [6][7 ]. In t his pap er we propo se a novel a lgorithm atte mpts to find NLOS s b y solving an eq uation s ystem which considers NLOSs as unk nown variables in addition to unknown position of MS. Such a n equa tion system i s underd etermined and cannot be solve b y traditional methods. Iterative method with adaptive thresholding (IMAT) is an effective so lution for co mpress sensing problem intro duced by F.Marvasti [10]. Our pr oposed algorithm, S RNI sol ve its underdetermine s ystem by using sparsit y feature of NLOS vector and based o n IMAT. The rest of this paper is organized as follows : SRNI algorithm a nd its requirements are introduced in sectio n II. Simulation results are given in section II I . Finally sec tion I V concludes this work. II. ALGORITH M Proposed algorith m is based on estimating of M S location b y diverse co mbinations of BS. It also uses sparse vector reconstructor to determined NLOS vector by an underdetermined s ystem of nonlinear equation. T aylor series estimator and IMAT methods are e mployed to obtain M S location under least square (LS) criterion and reconstruct NLOS sparse vector, respectively as our algorithm backbones. Firstly Taylor series estimator and IMAT Abolfathi. A, Behn ia F. Marvasti F . Department of Elec trical Engineering Sharif Universit y of Technology Email: abbas abolfath i@yahoo.com, behnia @sharif.edu, fm arvasti@sharif.edu NLOS Mitigation Using Spars ity Feature And Iterative Methods method are discussed and finally prop osed algorith m will b e introduced. A. Taylo r Series Estimator Suppose MS and BS are located in a t wo di mensional sp ace. Let N BS be placed in arbitrary loca tion aro und the MS . Position of ith BS can be expressed as bello w : (1) Measured range b y each BS ( is modeled as follo w: (2) Where rep resents Cartesian coo rdinates of MS at unknown position. n denotes measurement noise as zero- mean , i ndependent a nd Gaussian distributed random process. A non linear syste m consist s of N equatio n and 2 variable s which are MS unkno wn location is repr esented in (2). Usually N is greater than required and the system i s crop ped by noises. So a unique intersection for all eq uations is hard to find and it is needed to select the most pro bable answer as MS location. LS tr ies to find the e stimation that minimize t he su ms o f error squares o ver all measure ments. I n mathematical form LS can be state as: (3) Where is the ac curate distance b etween ith BS and MS and it can be written as: (4) An initial guess can be useful to solve nonlinear system in (2). Let be o ur initial gue ss for MS position. It can be written that: (5) Where and denote difference bet ween tr ue MS position and our guess. Using Taylor series expansion of equations in (2) and conside ring onl y terms b elow seco nd order we will have: (6) Where: . (7) We can define follo wing matrix to co mpact the equations: . (8) With these definitio ns, eq uations i n (2) can be r ewritten a s matrix form as follows: (9) which could minimize error squares in (3) can be expressed as: (10) Where R is a weighting matrix controlling con vergence speed and can be chosen as co variance or identical matrix. By using iterative method and updating and as b ellow, MS position satisf ying LS will be achieved. (11) Taylor series esti mator is one of the most acc urate methods to estimate loca tion fro m range measure ments, but it s convergence is not guaran teed and relies on initial g uess. B. Iterative Method with Ada ptive Threshold ing (IMAT) A vector is k nown a s sparse whic h most of it s coef ficients are zero in a domain. If there ar e more than 50 present non - zero coefficients, the vector is called dense [11]. Let S be vector which i s sparse in d omain. Consider vector Y as our observation to determine S . Assume Y has L coe fficients. is measure ment matrix relating Y and S as follo ws: (12) The problem is how to find S when only Y a nd are known. If then S will be determined as: (13) If the problem could n ot be solved by traditional methods. Ho wever by knowin g that S is sparse i n d omain, it can be deter mined uniquely even if L is less than M. Transform matrix is e mployed to rep resent S in its sparse domain as X . (14) IMAT is an iter ative method whic h attempts to find S using its sparsity feature. IMAT retrieves sparse vector by alternating pro jections between the information domain and the sparse domain. IM AT thresh olds sparse vector components i n each iter ation. It considers some of S components are known for sure. In this case , kno wn components of S should b e replaced in ne w S vecto r resulting b y IMAT , in each iteration. I MAT also assumes Y is a masked form o f S . it means measurement matrix just masks so me components of S . A simple pse udo-code is presented for IM AT algorithm bellow. Algorithm 1: Iterativ e Met hod w ith Adaptive Thresholding (IM AT) Input: Y := observation vector which has been masked M := mask vector Output: S := recovered vector Procedure IM AT(Y,M) 1. 2. For i = 0 : iter_ max 3. 4. 5. 6. 7. End for 8. End procedure Note that when the location of the sparsity i s unkno wn, at least L must be twice t he sparsity number to recover S [12 ]. C. Sparse Recovery of NLOS using IMAT (SRNI) Considering NLOS conditio n, range measure ments can be expressed as: (15) Where is measure ment noise sa me as which is used in ( 2). denotes NLOS er ror for ith BS due to signal traveli ng through non s traight path. Acco rding to tr iangle inequality law, N L is always non ne gative. N LOS vector can be defined as: (16) There are N equations and two MS location variables and N variables stands for NLOS. In ad dition because of no n linearity of ( 15 ) one more measurement a nd totally N+ 3 equations are needed to solve the system uniquely. T herefore traditional methods are not a ble to add ress the problem. Practical experiments indicate m ost o f the BS s have LO S view to MS so NL vector is spar se. Using sp arse property of NL vector IMAT can solve the problem. IMAT requires a transform to a lternate meas urements sp ace { to sparse space {NL}. NLOS erro r shifts MS estimated location from it s true value. This re placement is back ward the NLOS BS. For simplicity it is assumes th at only first BS faces NLOS error among all N BS s. Localizin g usi ng a co mbination of BS s except first BS will resu lt in true location. W e call it test co mbination for first B S. T he distance bet ween es timated location obtaining by test co mbination and first BS can be calculated by (4) . can be calculated as: ( 17) Where is the range meas ured by first BS. In the case when there are more than one NLOS BS , localizing with test combination cannot result in accurate position and NL will b e crop ped by error . However it is s till close enough to true value for IMAT. T his condition is illustrated in simulatio n study. Proposed tr ansform can be concluded as followin g pseudo - code: Algorithm 2 : Transform o f Range M easure m ent to NLOS Space Input: := Range measured by BSs := Number of all BSs := position of BSs Output: NL := NLOS vector Procedure Transfo rm( ) 1. For i=1:N 2. test co mbination by ig noring ith BS 3. MS estimated p osition b y LS and u sing 4. = 5. 6. End for 7. End procedure To use I MAT, a thresholding method must b e chosen. According to the fact the most shift in estimated BS locatio n is b ackward the BS with the greatest NLO S er ror , we can only choo se greater component of NL vector and let o thers be zero in thresholding seq uence. Now we are able to e mploy IMAT to solve ( 15 ) for finding NL vector and to estimate t he MS position b y modified measurements as SRNI al gorithm. SR NI is pr esented in following pseudo -code: Algorithm 3 : Sparse Reco very of NLOS using IM AT (SRNI ) Input: := Range measured by BSs := Number of all BS s := position of BSs Output: := estimated position of MS :=Number of NLOS BS id entified by SRNI :=estimated NLOS vec tor Procedure SRNI( )) 1. 2. For i = 0 : iter_max 3. NL :=Transform( ) 4. Threshold_ NL := T hreshold NL b y passing largest componen t in mag nitude and letti ng others be zero 5. NL = NL + Threshold_NL ; 6. End for 8. : MS estimated p osition by LS considerin g ( as range measurement. 7. M:Nu mber of NL co mponent greater than a cer tain value 8. End procedure Note that i n 7 th line of SRNI pseudo -code a certain value for thresholding is needed than can be considered as sta ndard deviation of noise measurement and also in 4 th line large component is c hosen b y ab solute value but ret urn in si gned value. Let M and N be the number of BS with NLOS err or and the number of all BS respectively. In two dime nsional space three measure ments is required to localizing so there are N - 3 extra meas urements. IM AT needs equations at lea st twice the M to recover NL vector. Therefore M should satisfy following condition to empower SRNI: (18) Using this li mit we can de fine a valid zone for SRNI. If the number o f N LOS B S rep orted by S RNI i s more t han M, results are unreliable. III. SIMULATIONS In this section simulation results are presented wh ich are conducted to investigate the performance of the proposed algorithm. Si x different sce narios are develop ed to study SRNI in whole aspect s. For comparison so me other w ell - known algor ithm suc h as LS [ 13 ], BB [4], BWLS [ 2] and RWGH [1 ] are ap plied too. Ho wever it is not expec ted that LS s uppresses the NLO S error but it is studied as the backbone of SRNI . Adaptive white Gaus sian noise m odel is e mployed t o simulate noise i n r ange measure ment. For si mplicity a ll B Ss are assumed to have same standard deviation for noise measurement. Standard deviation of noise measurement i s considered to be fixed to 60m unless otherwise stated. T o be free of noise behavior , 1 000 independent trials are used in each simulation. In all scenar ios BSs number 1 to 8 are located at ( 6000,0), (3000,-6000 ), ( - 3000 ,- 5000 ) , (-6000,- 1000 ), ( - 4000 ,6000), ( 0,5000), (4000,6000) , ( - 6000 ,4000 ) respectively in meters. Also MS is at ( 2000 ,1000) . Fig. 1 illustrates the geometr y. Fig.1. localization geometry NLOS er ror vector for BSs is considered as follow in meters: (19) But it may we use only some of these NLO S error s. It is clearly s tated which BSs are dealt with NLOS in each scenario description. To evaluate different res ults, root mean sq uare error ( RMSE) of estimated position is used which is calculated as: ( 20 ) Where ( and ( ) are the estimated and true position of MS in ith experi ment. Initial guess of LS and SRNI algorithm consider being MS true position to provide assurance that these al gorithm will converge. A. Iteratio n number respo nse This section atte mpts to show the affection of iteration number of SRNI on its p erformance. It is suppo sed onl y first two BS s are cropped by NLOS. Fig. 2 depicts the results. Fig.2. SRNI performance with different Iteration No . As it is appears after 3 iterati ons S RNI co nverge to its final state. Also it remains stable after extra i terations. Iteratio n number o f 10 is selected as a sufficient and trusted value in the rest of simulations. B. Resistance against no ise To evaluate the perfor mance of different algorithm dealin g with noisy conditio n, we vary sta ndard d eviation of noise from 0 to 1 00 meters. N LOS is assumed only for first BS. Fig. 3 presents the results. Fig.3. Influence of noise on localizing me thods performance This simulatio n indicates that RWGH and SRNI have a comparable RMSE to noise standard deviation however as noise increa ses SRNI p erform better than RWGH. In noiseless co ndition RWGH and SR NI will result in exact position. C. Resistance again st NLOS error In this par t ab ility of algorithms to suppress NLOS S err or is studied. It is considered th at only f irst BS is cropped b y NLOS which varies from 0 to 1000 meter. Fig 4 ill ustrates the results. Fig.4. Influence of NLOS increment on localizing methods performance LS a nd BB cannot mitigate the N LOS er ror and this is visible in this figure as the main weakness of BB and LS. BB is less af fected b y N LOS rather than LS. In other hand, LS i s the best al gorithm in LOS condit ion. RWGH and SRNI supp ress t he er r or in all over the NLOS variation however SRNI perfor ms better than RWGH. D. In crescent in NLOS station number To investigate the per formance o f algorithms against N LOS station n umber, this si mulation is conducted. According to inequality ( 18 ) SRNI can suppr ess the erro r up to 2 number of NLOS station due to the fact there are 8 stations in general. To exa mine the cond ition with m number of N LOS station, it is as sumed t hat the first m stations have NLOS according to ( 19 ). Fig. 5 confirms the inequality of ( 18 ). Fig.5. Influence of increment in NLOS number on localizing methods performance E. In crement in total sta tion number This subsectio n reveals the p erformance of al gorithm a gainst increment i n total station numb er. Onl y first BS experience s NLOS. It is ex pected g reater number of station res ults in better localizing. Ho wever it is not true in ca se of RWGH. LS perfor mance i mproves which is t he main idea in generation of pro posed transform. BWLS is unable t o estimate position correctly when there are a few stations. SRNI and RWGH have acce ptable per formance i n all conditions. Results are pr esented in Fig. 6. Fig.6. Iinfluence of increment in total BS number on localizing methods performance F. Time efficiency This simulation indicates the ti me efficienc y of alg orithms against the incre ment of the stations. Results ar e rep orted for an Intel corei5 2.4 GHz CPU. Fig 7 depicts the ti me performance of different al gorithm. Fig.7. Timing performance of different methods As it is ap pear RWGH requires calculati ng time i n an exponential manner related to station number. So it is not possible to use RGWG in large co mbination o f BSs. SRNI calculating time is linear to station number. T herefore SRNI is still fast enough when there are numerous BSs. IV. C ONCL USION Simulation results indicate that large error in estimated location of MS can be exper ienced if NLOS is not suppressed. We introd uced an extra variable standing for NLOS for each B S to dete rmined NLOS value of BS. Therefore the number o f variables is more t han equations . Proposed algorithm, SRNI, employs I MAT to solve this underdetermined syste m. The onl y req uired co nsideration is sparsity o f N LOS vector. The maximum NLO S n umber t hat SRNI ca n dea l with is calculat ed. T his limit can b e used as a trust factor for SRNI result s. The co mparison of different conventional algorithms is pr esented b y simulation stud y. It is sho wn that SRNI has the better performance a mong al l algorithms in its valid zone. SRNI unlike R WGH is fast enough to b e employed for large number of BS. It ca n be stated that SRNI performs as the best algorithm in large combination of BSs and still r emains accurate in lower number of BSs . R EFERENCES [1] Chen, Pi-Chun. "A non-lin e- of -sight erro r mitigation algorithm in location estimation." Wireless Communicati ons and Networking Conference, 1999. WCNC. 1999 IEEE . V ol. 1. IEEE, 1999. [2] Yang, Yuan, Yubin Zhao, and Marcel K yas. "Weighted least- squares by bounding-b ox (b-wls) for n los mitigation of indoor localization." Vehicular Technology Conference (VTC Spring), 2013 IEEE 77th . IEEE, 2013. [3] Chan, Yiu -Tong, et al. "Time- of -arrival b ased localization under NLOS conditions." IEE E Transactions o n Vehicu lar Technology 55.1 (2006): 17-24. [4] Will, Heiko, et al. "The mem bership degree min -max localization algorithm ." Ubiquitous Positioning, Indoor Navigation, and Location Based Service ( UPINLBS), 2012 . IEEE, 2012. [5] Chan, Yiu Tong, and K. C. Ho. "A si mple and efficient estimator for h yperbolic location." IEE E Transactions on signal processing 42.8 (1994): 1905-1915. [6] Zhao, S. H., and Shin g-Chow C han. "A n ovel algorithm for mobile station location estimation with non e line of sight error using ro bust least M-estimation. " Circuits a nd Systems, 2008. ISCAS 2008. IEEE International Symposium on . IEEE, 2008. [7] Shikur, Behailu Y., and Tobias Weber. "Robust cooperative localization in mixed LOS and NLOS environments using TOA." Positioning, Navigation and Communication (WPNC), 2014 11th Workshop on . IEEE, 2014. [8] Yang, Zheng, and Yunh ao Liu. "Quality o f trilateration : Confidence-based iterative localization." IEE E Transactions on Parallel and Distributed Systems 21.5 (2010): 631-640. [9] Chartrand, Rick, and Wotao Yin. "Iteratively reweighted algorithms for compressive sensing." Acoustics, speech and signal processing, 2008. ICASSP 2008. IEEE international conference on . IEEE, 2008. [ 10 ] Marvasti, Farrokh, et al. "Sparse signal processing usin g iterative method with adaptive thresholding (IMAT)." Telecommunications (ICT), 2012 19th International Conference on . IEEE, 2012. [ 11 ] Zandieh, Amir, et al. "Reconstruction of sub -Nyquist random sampling f or sparse and multi-band signals." arXiv preprint arXiv:1411.6587 (2014). [ 12 ] Azghani, Masoumeh, and Farokh Marvasti. "Iterative methods for random sampling an d compressed sensing recovery." Sampling Theory and Applications. Proceedings of 10th International Conference on Eurasip . 2013. [ 13 ] Foy, Wade H. "Position-location solutions by Taylor-series estimation." IEEE Transactions o n Aerospace and Electronic Systems 2 (1976): 187-194.
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment