Voronoi Diagrams for a Moderate-Sized Point-Set in a Simple Polygon
Given a set of sites in a simple polygon, a geodesic Voronoi diagram of the sites partitions the polygon into regions based on distances to sites under the geodesic metric. We present algorithms for computing the geodesic nearest-point, higher-order and farthest-point Voronoi diagrams of m point sites in a simple n-gon, which improve the best known ones for m <= n/ polylog n. Moreover, the algorithms for the geodesic nearest-point and farthest-point Voronoi diagrams are optimal for m <= n/ polylog n. This partially answers a question posed by Mitchell in the Handbook of Computational Geometry.
💡 Research Summary
This paper addresses the problem of constructing geodesic Voronoi diagrams for a set S of m points lying inside a simple polygon P with n vertices. Three variants are considered: the nearest‑point (NP) diagram, the order‑k (higher‑order) diagram, and the farthest‑point (FP) diagram. Prior to this work, the best known algorithms for all three variants ran in O((n+m) log (n+m)) time, and a lower bound of Ω(n + m log m) was known. However, for the regime m ≤ n/ polylog n the gap between upper and lower bounds remained large, and Mitchell’s question in the Handbook of Computational Geometry about closing this gap was still open.
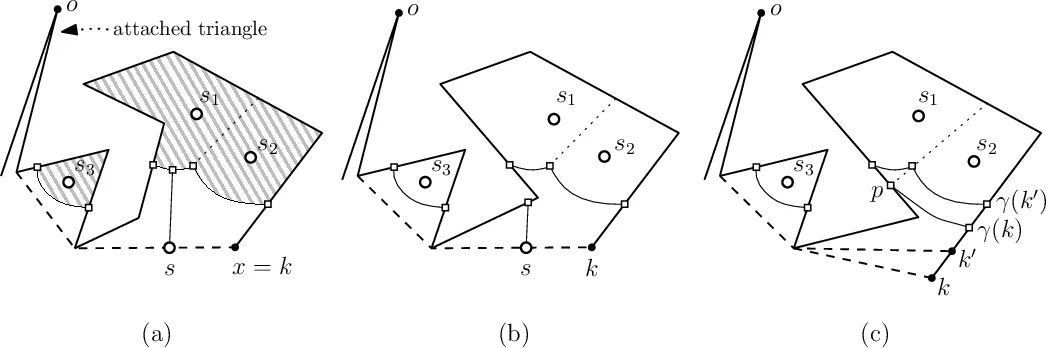
The authors introduce a “polygon‑sweep” paradigm combined with the computation of a “topological structure” (the adjacency graph of Voronoi cells) that is strictly smaller than the full diagram. The sweep fixes a point o on the polygon boundary and moves another point x clockwise along the boundary. At each position the sub‑polygon bounded by the shortest path π(o,x) and the boundary segment from o to x contains a subset S₍o,x₎ of the sites. The algorithm incrementally updates the topological structure of the Voronoi diagram of S₍o,x₎ as x advances. Because the topological structure has lower combinatorial complexity, each event can be processed in polylogarithmic time.
A crucial sub‑routine is the computation of a point equidistant (under the geodesic metric) from three given sites. The naïve approach costs O(n) time, but the authors exploit the Guibas‑Hershberger shortest‑path data structure (built in O(n) time, query O(log n)) to locate such a point in O(log² n) time via a two‑level binary search on a subdivision of the polygon. This enables handling each topological change event in O(polylog {n,m}) time.
The resulting algorithms achieve the following running times:
-
Nearest‑point Voronoi diagram (VD): O(n + m log m log² n). For m ≤ n/ log³ n the algorithm matches the lower bound Ω(n + m log m) and is therefore optimal. Together with the earlier Papadopoulou‑Lee algorithm (optimal for m ≥ n) this yields optimal performance for all m except the narrow interval n/ log³ n < m < n.
-
Order‑k Voronoi diagram (k‑VD): O(k² m log m log² n + min{nk, n(m‑k)}). The paper also proves a tight combinatorial bound of Θ(k(m‑k) + min{nk, n(m‑k)}) for the diagram in a simple polygon, improving upon previous results that were not tight for this setting.
-
Farthest‑point Voronoi diagram (FVD): O(n + m log m + m log² n). This is optimal for m ≤ n/ log² n, complementing the earlier Aronov‑et‑al. algorithm (optimal for m ≥ n).
Beyond static construction, the authors show how the topological structure can be used to build a dynamic data structure for nearest‑ or farthest‑point queries. By partitioning the dynamic set S into √m blocks and maintaining the topological structure for each block, updates (insert/delete) take O(√m log m log² n) time and queries take O(√m log(n+m)) time. This improves upon static solutions when the point set changes frequently.
The paper also contributes an O(log n)‑time algorithm for computing the geodesic center of three points (assuming the Guibas‑Hershberger structure) and an O(m log m log² n)‑time algorithm for the geodesic center of m points, which are used as sub‑procedures in the Voronoi constructions.
In summary, the authors close the long‑standing gap for geodesic nearest‑ and farthest‑point Voronoi diagrams in the regime m ≤ n/ polylog n, providing optimal or near‑optimal algorithms and a tight combinatorial analysis for higher‑order diagrams. Their techniques—polygon sweeping, topological‑structure maintenance, and fast three‑site equidistance computation—represent significant methodological advances in computational geometry and have immediate implications for applications such as robot motion planning, geographic information systems, and graphics where geodesic distances inside polygonal domains are relevant.
Comments & Academic Discussion
Loading comments...
Leave a Comment