Consensus State Gram Matrix Estimation for Stochastic Switching Networks from Spectral Distribution Moments
Reaching distributed average consensus quickly and accurately over a network through iterative dynamics represents an important task in numerous distributed applications. Suitably designed filters applied to the state values can significantly improve the convergence rate. For constant networks, these filters can be viewed in terms of graph signal processing as polynomials in a single matrix, the consensus iteration matrix, with filter response evaluated at its eigenvalues. For random, time-varying networks, filter design becomes more complicated, involving eigendecompositions of sums and products of random, time-varying iteration matrices. This paper focuses on deriving an estimate for the Gram matrix of error in the state vectors over a filtering window for large-scale, stationary, switching random networks. The result depends on the moments of the empirical spectral distribution, which can be estimated through Monte-Carlo simulation. This work then defines a quadratic objective function to minimize the expected consensus estimate error norm. Simulation results provide support for the approximation.
💡 Research Summary
The paper addresses the problem of accelerating distributed average consensus in networks whose topology changes randomly over time. Traditional consensus algorithms update each node’s state by a linear combination of its neighbors’ states, and the convergence speed is governed by the spectral properties of the iteration matrix (W). When the network is static, one can design polynomial filters that act on the eigenvalues of (W) to speed up convergence. However, in a time‑varying random network the iteration matrix changes at each iteration, making eigenvalue‑based filter design infeasible.
To tackle this, the authors consider a “switching network” model: at each iteration the network either stays the same or is replaced by an independent draw from a prescribed random graph distribution (e.g., Erdős‑Rényi, random geometric, stochastic block model). The probability of a switch is a fixed parameter (p_{sw}). Over a filtering window of length (d) a degree‑(d) filter with coefficients ({a_{k+1}}_{k=0}^{d}) is applied periodically to the recent state vectors. The coefficients must sum to one to preserve the average.
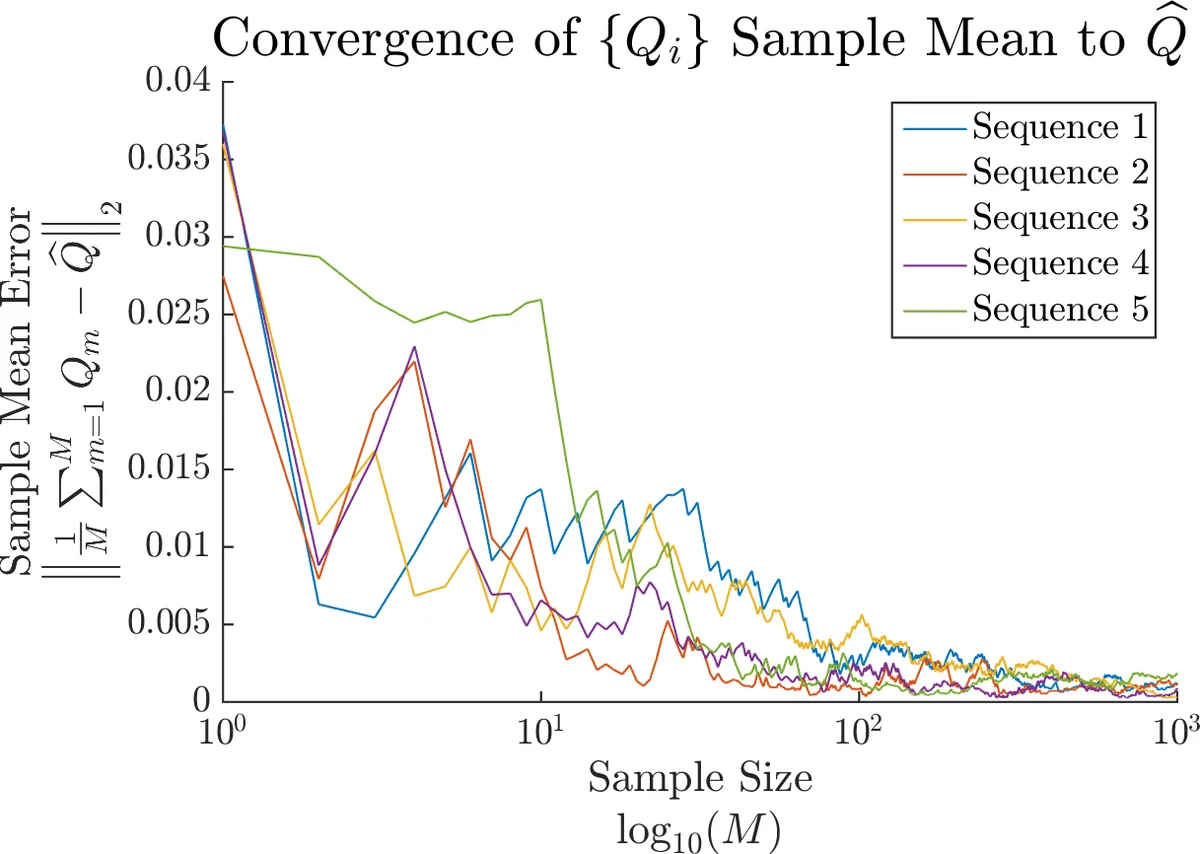
The key performance metric is the expected squared norm of the consensus error after filtering. By writing the error as a linear combination of filtered state terms and introducing the Gram matrix (\mathbf{Q}(s)) that depends on the particular switching sequence (s), the expected error can be expressed as (\mathbf{a}^\top \mathbb{E}
Comments & Academic Discussion
Loading comments...
Leave a Comment