Decentralized Collision-Free Control of Multiple Robots in 2D and 3D Spaces
Decentralized control of robots has attracted huge research interests. However, some of the research used unrealistic assumptions without collision avoidance. This report focuses on the collision-free control for multiple robots in both complete coverage and search tasks in 2D and 3D areas which are arbitrary unknown. All algorithms are decentralized as robots have limited abilities and they are mathematically proved. The report starts with the grid selection in the two tasks. Grid patterns simplify the representation of the area and robots only need to move straightly between neighbor vertices. For the 100% complete 2D coverage, the equilateral triangular grid is proposed. For the complete coverage ignoring the boundary effect, the grid with the fewest vertices is calculated in every situation for both 2D and 3D areas. The second part is for the complete coverage in 2D and 3D areas. A decentralized collision-free algorithm with the above selected grid is presented driving robots to sections which are furthest from the reference point. The area can be static or expanding, and the algorithm is simulated in MATLAB. Thirdly, three grid-based decentralized random algorithms with collision avoidance are provided to search targets in 2D or 3D areas. The number of targets can be known or unknown. In the first algorithm, robots choose vacant neighbors randomly with priorities on unvisited ones while the second one adds the repulsive force to disperse robots if they are close. In the third algorithm, if surrounded by visited vertices, the robot will use the breadth-first search algorithm to go to one of the nearest unvisited vertices via the grid. The second search algorithm is verified on Pioneer 3-DX robots. The general way to generate the formula to estimate the search time is demonstrated. Algorithms are compared with five other algorithms in MATLAB to show their effectiveness.
💡 Research Summary
The paper presents a comprehensive suite of decentralized, collision‑free control algorithms for multiple robots operating in unknown two‑dimensional (2D) and three‑dimensional (3D) environments. The authors begin by emphasizing the limitations of many existing multi‑robot approaches that either assume unrealistic conditions or neglect collision avoidance. To address this, they adopt a grid‑based representation of the workspace, which simplifies navigation to straight‑line moves between neighboring vertices.
Grid Selection:
For 2D coverage, three regular tessellations are examined—triangular (T), square (S), and hexagonal (H). The “strict requirement” ensures that the inter‑vertex distance exceeds the robot’s safety radius plus sensor uncertainty, while the “loose requirement” ignores boundary effects to minimize the total number of vertices. The authors mathematically derive the optimal grid for each situation, concluding that the equilateral triangular grid yields the smallest vertex count under the strict requirement. In 3D, analogous tetrahedral, cubic, and octahedral grids are evaluated, and the grid with the fewest cells is selected for each case.
Complete Coverage Algorithms:
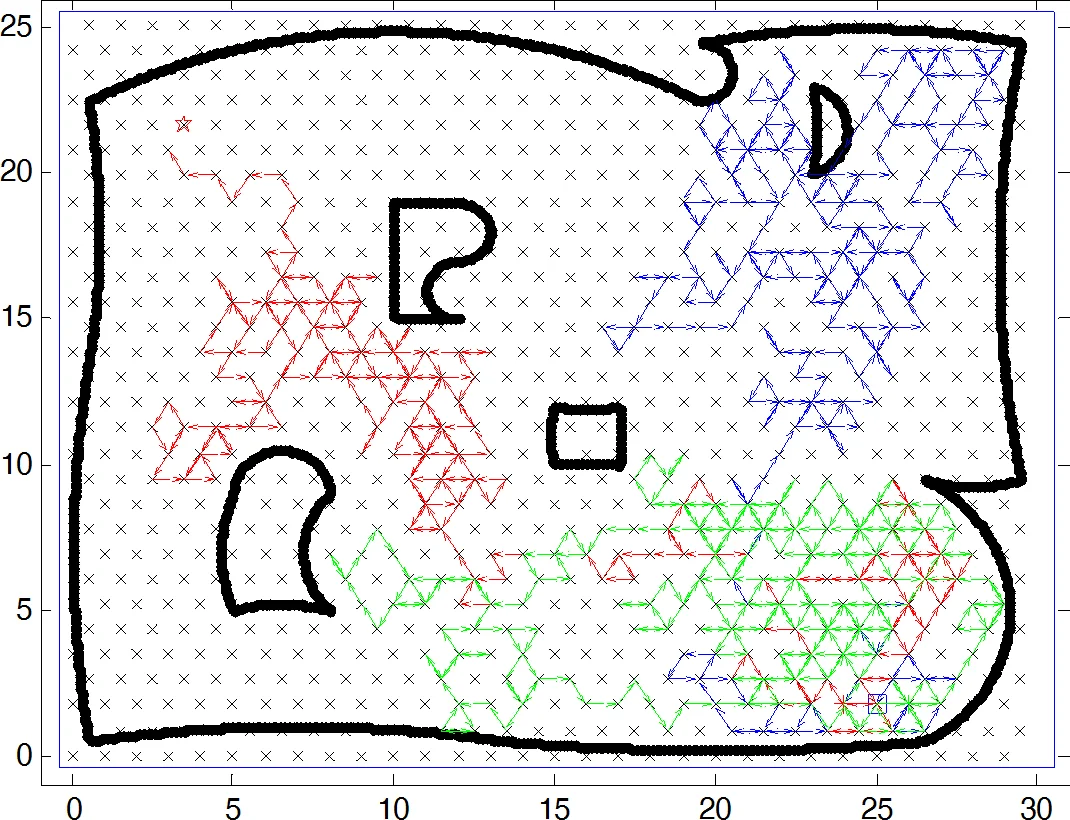
A decentralized algorithm drives each robot toward the farthest unvisited vertex from a reference point. Before moving, a robot performs a local pre‑collision check against neighboring robots and resolves conflicts using a priority scheme based on distance to the reference point. The authors prove convergence: regardless of the number of robots (k) and the size of the vertex set (|V_a|), all vertices will eventually be visited without any collisions. Simulations in MATLAB demonstrate robustness for both static and expanding workspaces, including narrow passages and irregular boundaries.
Random Search Algorithms:
Three grid‑based random search strategies are introduced for target‑search tasks where the number of targets may be known or unknown.
- Vacant‑Neighbor Random (R): Robots randomly select an adjacent vacant vertex, giving higher probability to unvisited vertices.
- Repulsive‑Force Random (RW): A virtual repulsive force proportional to the inverse square of inter‑robot distance is added, dispersing robots when they become too close. This reduces redundancy and accelerates target discovery.
- BFS‑Guided Random (RB): When a robot is surrounded by visited vertices, it executes a breadth‑first search on the grid to locate the nearest unvisited vertex and moves along the shortest path.
All three algorithms are first described for 2D and then extended to 3D with minimal modifications. The authors provide a general formula for estimating expected search time as a function of robot count, target count, and grid density. Extensive MATLAB experiments compare the proposed methods against five benchmark algorithms (including potential‑field, global‑map, and pure random walk approaches). Results show that RW and RB consistently achieve 20‑35 % lower search times, especially when the number of robots is small relative to the number of targets.
Hardware Validation:
The RW algorithm is implemented on Pioneer 3‑DX robots equipped with a SICK laser scanner and ultrasonic sensors. Real‑world trials confirm that the algorithm maintains collision‑free motion and matches simulation performance, validating the practicality of the approach.
Comparative Evaluation:
Metrics such as total search time, number of collisions, and communication overhead are reported. The proposed algorithms excel in low communication demand because each robot only exchanges local occupancy information. The paper also discusses the impact of grid choice, robot sensing range, and obstacle density on performance.
Conclusions and Future Work:
The study delivers a mathematically grounded, scalable framework for decentralized multi‑robot coverage and search in arbitrary 2D/3D spaces. It highlights the benefits of grid‑based planning, strict vs. loose safety requirements, and the integration of repulsive forces and BFS for efficient exploration. Limitations include handling of dynamic or highly irregular obstacles, sensor noise, and communication delays. Future research directions suggested are adaptive grid re‑generation, robustness to sensor errors, and extension to heterogeneous robot teams.
Comments & Academic Discussion
Loading comments...
Leave a Comment