An Approximation Method for the Scattering Data of One-Dimensional Soliton Equations under Arbitrary Rapidly-Decreasing Initial Pulses
We present a novel approximation method that can predict the number of solitons asymptotically appearing under arbitrary rapidly decreasing initial wave packets. The number of solitons can be estimated without integration of the original soliton equations. As an example, we take the one-dimensional nonlinear Schrodinger equation and estimate the behaviors of the scattering amplitude in detail. The results show good agreement compared with those obtained by direct numerical integration. The presented method is applicable to a wide class of one-dimensional soliton equations.
💡 Research Summary
The paper introduces a new numerical approximation technique for predicting the number of solitons that emerge from arbitrary rapidly decreasing initial wave packets, without having to integrate the original nonlinear evolution equations. The authors focus on the one‑dimensional nonlinear Schrödinger equation (NLSE) as a representative integrable system, but the method is applicable to a broad class of AKNS‑type soliton equations.
In the inverse scattering transform (IST) framework, the initial condition ψ(x,0) acts as a scattering potential in the Zakhrov‑Shabat (ZS) problem. Solving the ZS eigenvalue problem yields the transmission coefficient a(ξ) and reflection coefficient b(ξ); the discrete zeros of a(ξ) in the upper half‑plane correspond to asymptotically generated solitons. For generic rapidly decreasing ψ, however, the ZS problem cannot be solved analytically. To overcome this, the authors discretize the spatial domain into N small intervals Ij of width Δx = L/N and approximate ψ(x,0) by a piecewise‑constant function ψj = Vj on each interval. This reduces the spatial operator S in the ZS system to a set of constant matrices Sj, making the problem amenable to a Fredholm‑type integral formulation.
By rewriting the ZS equation as Ψ(x,ξ)=Ψ0(x,ξ)+∫g(x−x′)U(x′)Ψ(x′,ξ)dx′, where g is a step‑function matrix and U contains the piecewise‑constant potential, the authors expand the solution in a Neumann series. They show that only even‑order terms contribute to the transmission coefficient a(ξ), while odd‑order terms contribute to the reflection coefficient b(ξ). The series is then truncated by replacing the continuous integrals with finite matrix products. They introduce three key matrices:
- V and V* – diagonal matrices whose entries encode the amplitude Vj and the phase factor e^{±2iξxj}.
- G – a lower‑triangular matrix whose (i,j) element is θ(xi−xj)Δx, representing the step function integration kernel.
The transmission coefficient becomes
a(ξ)=1+e·W·e^T, with W = (I−G V G V*)^{-1}−I,
where e is a column vector of ones. This compact expression requires only matrix inversion and multiplication, eliminating the need for special functions or direct integration of the NLSE.
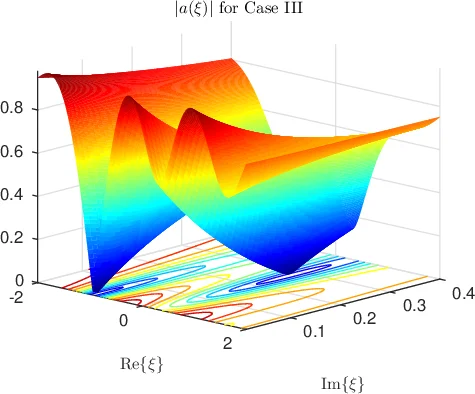
The method is validated through several numerical experiments. First, the authors compute |a(ξ)| for a sech‑type pulse ψ_s(x)=2 sech x, which is known analytically to generate a single soliton (|a|≈1). The numerical result reproduces the flat, unit‑valued transmission over a wide ξ‑range, confirming the method’s accuracy. Second, a Gaussian pulse ψ_G(x)=2 e^{−π^2x^2} is examined; |a(ξ)| is found to be less than one, indicating that the Gaussian cannot evolve into a pure soliton—a result consistent with analytical expectations. The authors demonstrate that increasing N (the number of intervals) drives |a(ξ)| toward the theoretical limit, showing convergence of the discretization.
A further test involves superposing two well‑separated pulses with controllable relative phase. By varying the phase, the authors observe changes in the spectral shape of a(ξ) and consequently in the number and parameters of the emergent solitons. Direct time‑integration of the NLSE confirms that the phase‑dependent predictions from the matrix method match the full dynamical evolution.
The paper discusses practical considerations: the initial packet must decay sufficiently fast so that truncation at finite L introduces negligible error; the discretization step Δx must be small enough to keep |Vj|Δx<1 for convergence of the Neumann series; and the matrix (I−G V G V*) must be invertible, which is guaranteed under the rapid‑decay assumption. Computational cost scales as O(N^3) for a naïve inversion, suggesting that for very fine discretizations one should employ sparse‑matrix techniques or parallel algorithms. Moreover, while the method yields the magnitude of a(ξ) directly, extracting the full complex phase (necessary for reconstructing the complete scattering data) would require additional steps, such as computing b(ξ) or using a separate phase‑reconstruction algorithm.
In summary, the authors present a robust, purely time‑independent numerical scheme that transforms the scattering problem of integrable soliton equations into a finite‑dimensional linear algebra problem. By doing so, they enable rapid estimation of soliton counts and spectral characteristics for arbitrary rapidly decreasing initial conditions, bypassing the need for costly direct integrations. This approach holds promise for experimental planning in nonlinear optics, Bose‑Einstein condensates, plasma physics, and any domain where integrable soliton dynamics play a role.
Comments & Academic Discussion
Loading comments...
Leave a Comment