Box representations of embedded graphs
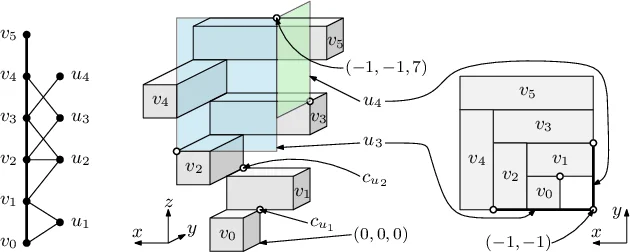
A $d$-box is the cartesian product of $d$ intervals of $\mathbb{R}$ and a $d$-box representation of a graph $G$ is a representation of $G$ as the intersection graph of a set of $d$-boxes in $\mathbb{R}^d$. It was proved by Thomassen in 1986 that every planar graph has a 3-box representation. In this paper we prove that every graph embedded in a fixed orientable surface, without short non-contractible cycles, has a 5-box representation. This directly implies that there is a function $f$, such that in every graph of genus $g$, a set of at most $f(g)$ vertices can be removed so that the resulting graph has a 5-box representation. We show that such a function $f$ can be made linear in $g$. Finally, we prove that for any proper minor-closed class $\mathcal{F}$, there is a constant $c(\mathcal{F})$ such that every graph of $\mathcal{F}$ without cycles of length less than $c(\mathcal{F})$ has a 3-box representation, which is best possible.
💡 Research Summary
The paper investigates the boxicity of graphs— the minimum dimension d such that a graph can be represented as the intersection graph of axis‑aligned d‑dimensional boxes (d‑boxes) in ℝᵈ. Thomassen’s classic 1986 result established that every planar graph has boxicity at most 3, and that this bound is tight. The authors aim to extend this phenomenon to graphs embedded on higher‑genus surfaces, focusing on orientable surfaces with a restriction on short non‑contractible cycles (i.e., large edge‑width).
Main Contributions
-
5‑Box Representation for High Edge‑Width Embeddings
The central theorem (Theorem 8) proves that any graph embedded in an orientable surface S_g (genus g > 1) whose edge‑width is at least 40(2g − 1) admits a representation as the intersection of five interval graphs, i.e., boxicity ≤ 5. The proof proceeds by first augmenting the graph to a triangulation of the same surface while preserving edge‑width. Thomassen’s planarizing‑cycle theorem (Theorem 1) guarantees a collection of g pairwise disjoint non‑contractible cycles C₁,…,C_g whose pairwise distances are large (≥ 4). Removing the vertices of these cycles leaves a planar subgraph, which can be represented by three interval dimensions (I₁, I₂, I₃) using Thomassen’s strict 3‑box construction. The cycles together with their immediate neighbours form a disjoint union of planar graphs; these are represented by another three interval dimensions (I₄, I₅, I₆). Finally, a seventh interval dimension I₇ distinguishes vertices on the cycles from those far away. By merging I₃, I₆, and I₇ into a single interval dimension, the total number of dimensions collapses to five, establishing the desired bound. -
Linear Vertex‑Deletion Bound
While the initial argument yields a function f(g) that is exponential in g, the authors refine the technique (Theorem 13) to show that deleting at most 60g − 30 vertices from any graph of genus g (orientable or non‑orientable) suffices to obtain a subgraph of boxicity ≤ 5. This linear bound follows from a careful analysis of the planarizing cycles and the neighborhoods they induce, together with the fact that each deletion reduces the genus by at most one. -
Improved Bounds for Toroidal Graphs
Applying the same methodology to the torus (g = 1) yields a tighter bound: toroidal graphs have boxicity at most 6, and if they contain no non‑contractible triangles, the bound improves to 5 (Theorem 10). This improves earlier results that gave a bound of 7 for toroidal graphs. -
3‑Box Representations for Minor‑Closed Classes
The paper also addresses proper minor‑closed families 𝔽. Using a combination of path‑degenerate graph theory and acyclic coloring, the authors prove (Corollary 15) that there exists a constant c(𝔽) such that any graph in 𝔽 with no cycles shorter than c(𝔽) has boxicity at most 3. This is optimal already for the class of K₆‑minor‑free graphs, where a 3‑box representation cannot be guaranteed without a length restriction. Moreover, by invoking earlier results on graphs of bounded genus, they obtain (Corollary 16) that any graph embeddable on a surface of Euler genus g and with girth at least c·log g (for a suitable constant c) also has boxicity ≤ 3, which is best possible up to the constant factor.
Technical Tools and Innovations
-
Strict Box Representations: The authors rely heavily on Thomassen’s notion of strict 2‑ and 3‑box representations, where boxes are non‑degenerate, interiors are disjoint, and pairwise intersections are (d − 1)‑boxes. This structure enables the definition of “empty inner corners” for facial triangles, a geometric feature that permits the insertion of additional boxes without creating unwanted intersections.
-
Empty Inner Corners: Lemma 4 shows that if the third‑dimension intervals of a triangle’s vertices strictly overlap, the triangle possesses an empty inner corner. Theorem 5 and Theorem 6 then guarantee that, starting from any strict 3‑box representation of a planar triangulation, one can extend it so that every facial triangle (except possibly one) has such a corner. This property is crucial for gluing together the planar pieces derived from the planarizing cycles.
-
Planarizing Collections: Theorem 1 (Thomassen) provides a set of non‑contractible cycles with large mutual distances, allowing the decomposition of the high‑genus embedding into planar regions. The distance condition ensures that edges do not cross between distinct regions, preserving planarity after removal.
-
Interval Graph Decomposition: By interpreting a d‑box representation as the intersection of d interval graphs, the authors translate geometric constraints into combinatorial ones. The final reduction from seven to five interval graphs is achieved by observing that the third interval of the first planar part, the third interval of the second planar part, and the separating interval I₇ can be merged without violating the intersection properties.
-
Path‑Degenerate Graphs and Acyclic Coloring: For minor‑closed families, the authors use the concept of (k, ℓ)‑path‑degenerate graphs, which admit a vertex ordering that facilitates a 3‑box representation. This is linked to acyclic colorings, where a bounded number of colors ensures a bounded boxicity.
Implications and Future Directions
The results substantially narrow the gap between known upper bounds and lower bounds for boxicity on surfaces. The linear vertex‑deletion function f(g) suggests algorithmic applications: one can preprocess a high‑genus graph by removing O(g) vertices and then apply known 5‑box construction algorithms. The work also opens several avenues:
- Determining whether the constant 5 in Theorem 8 can be reduced for orientable surfaces of higher genus, perhaps to 4, remains open.
- Extending the linear deletion bound to non‑orientable surfaces with tighter constants.
- Investigating whether the girth condition in Corollary 16 can be replaced by a constant independent of g for specific minor‑closed families.
- Developing constructive algorithms that, given a high‑genus embedding, output an explicit 5‑box representation in polynomial time.
Overall, the paper delivers a cohesive framework that blends topological graph theory, geometric representations, and combinatorial coloring techniques to achieve near‑optimal boxicity bounds for a broad spectrum of graph classes.
Comments & Academic Discussion
Loading comments...
Leave a Comment